
A Deep Learning-Enhanced Stereo Matching Method and Its Application to Bin Picking Problems Involving Tiny Cubic Workpieces
Abstract
:1. Introduction
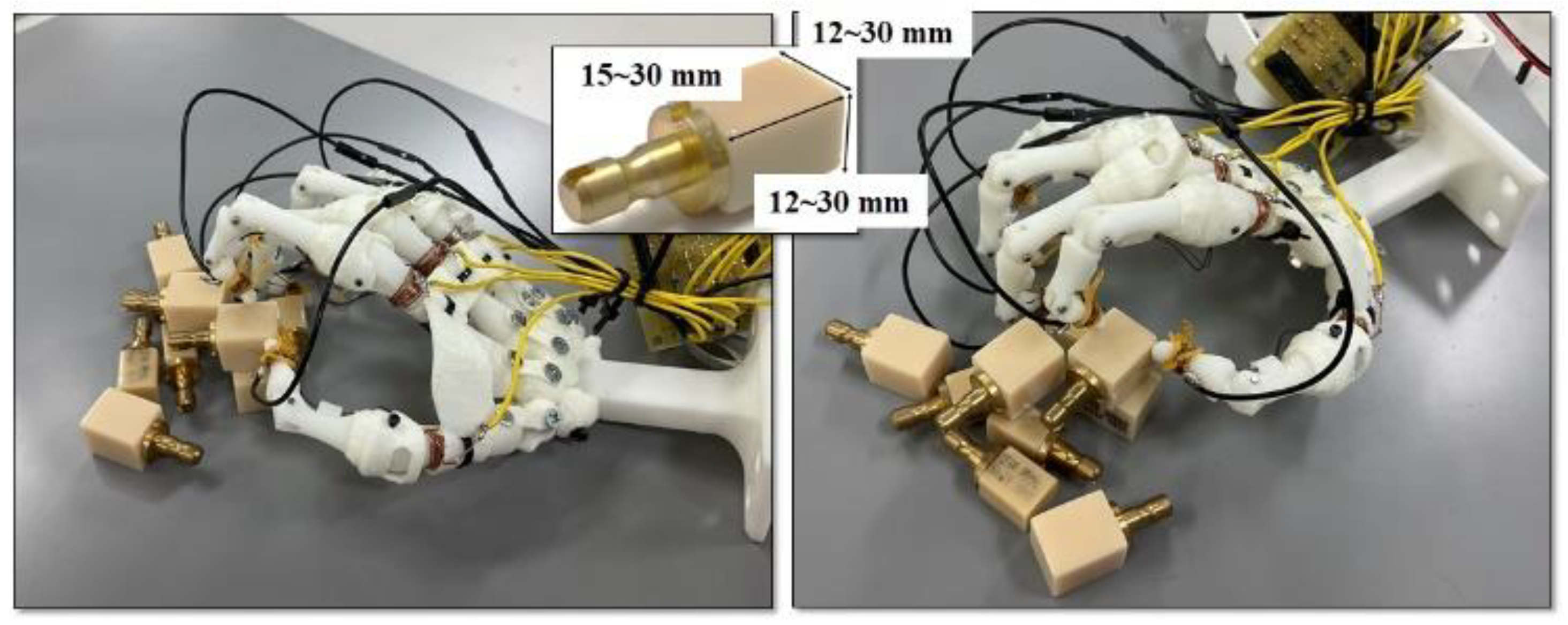
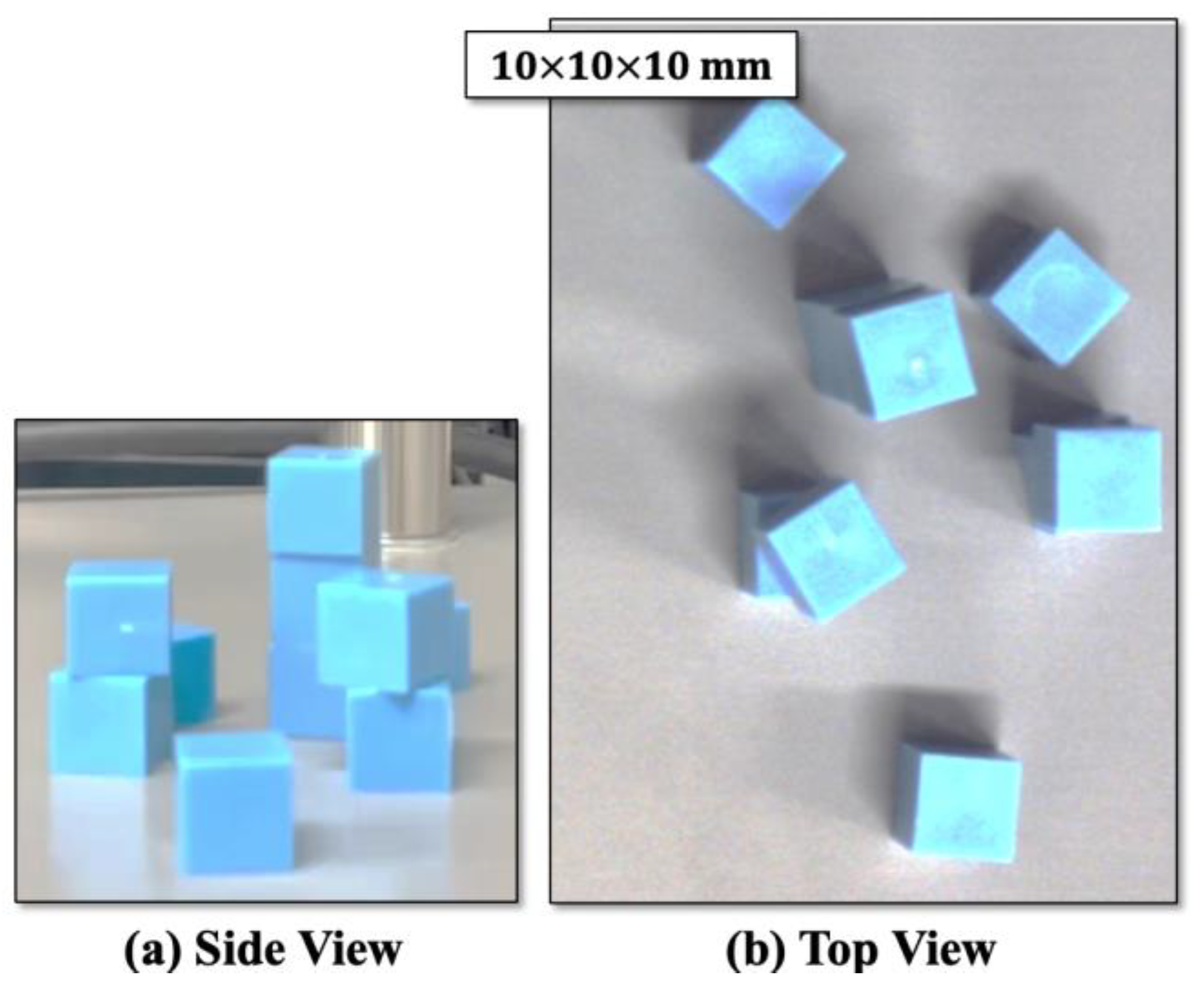
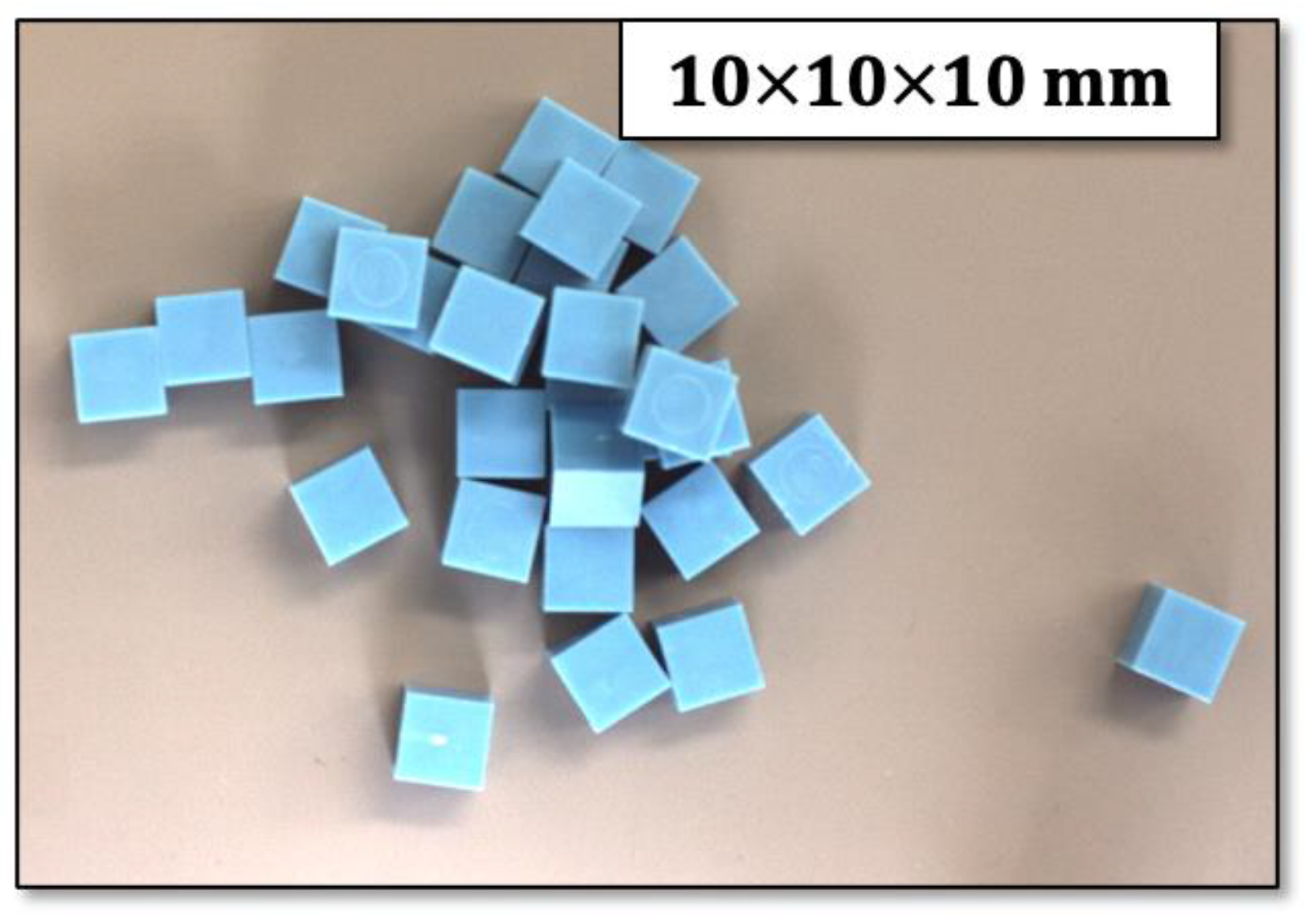
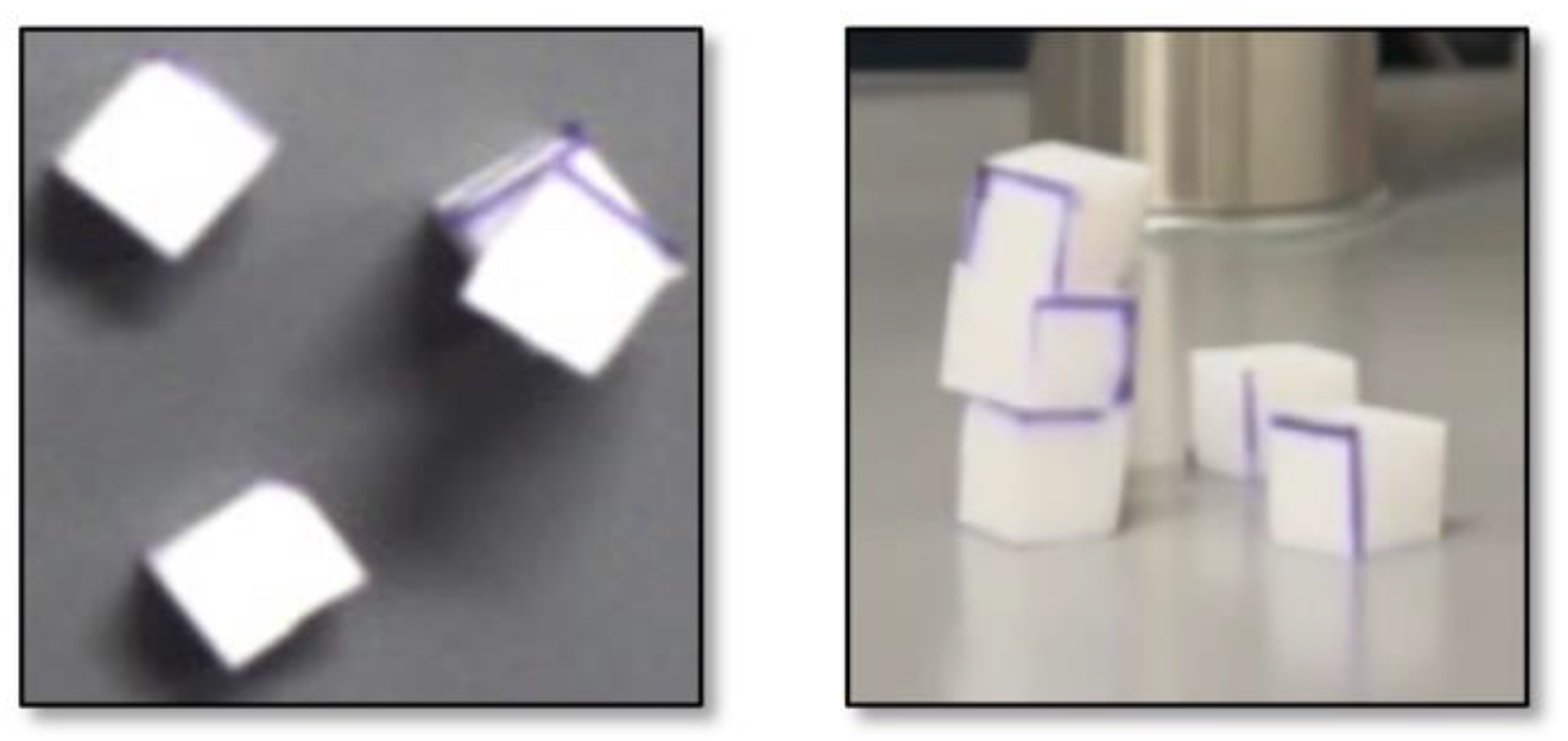
2. Bin Picking Problem Consisting of Tiny Workpieces
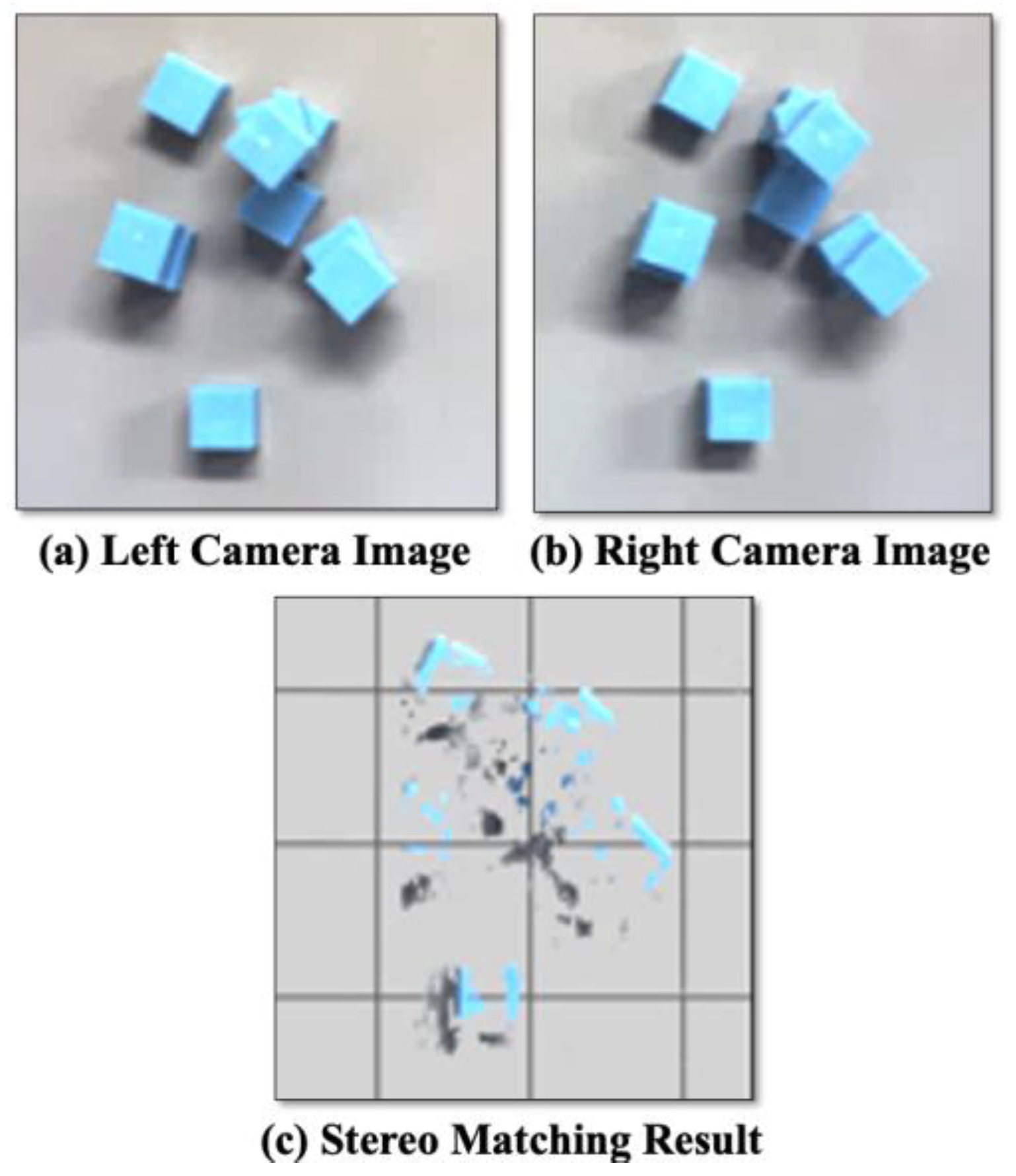
3. Suggested Stereo Matching Method
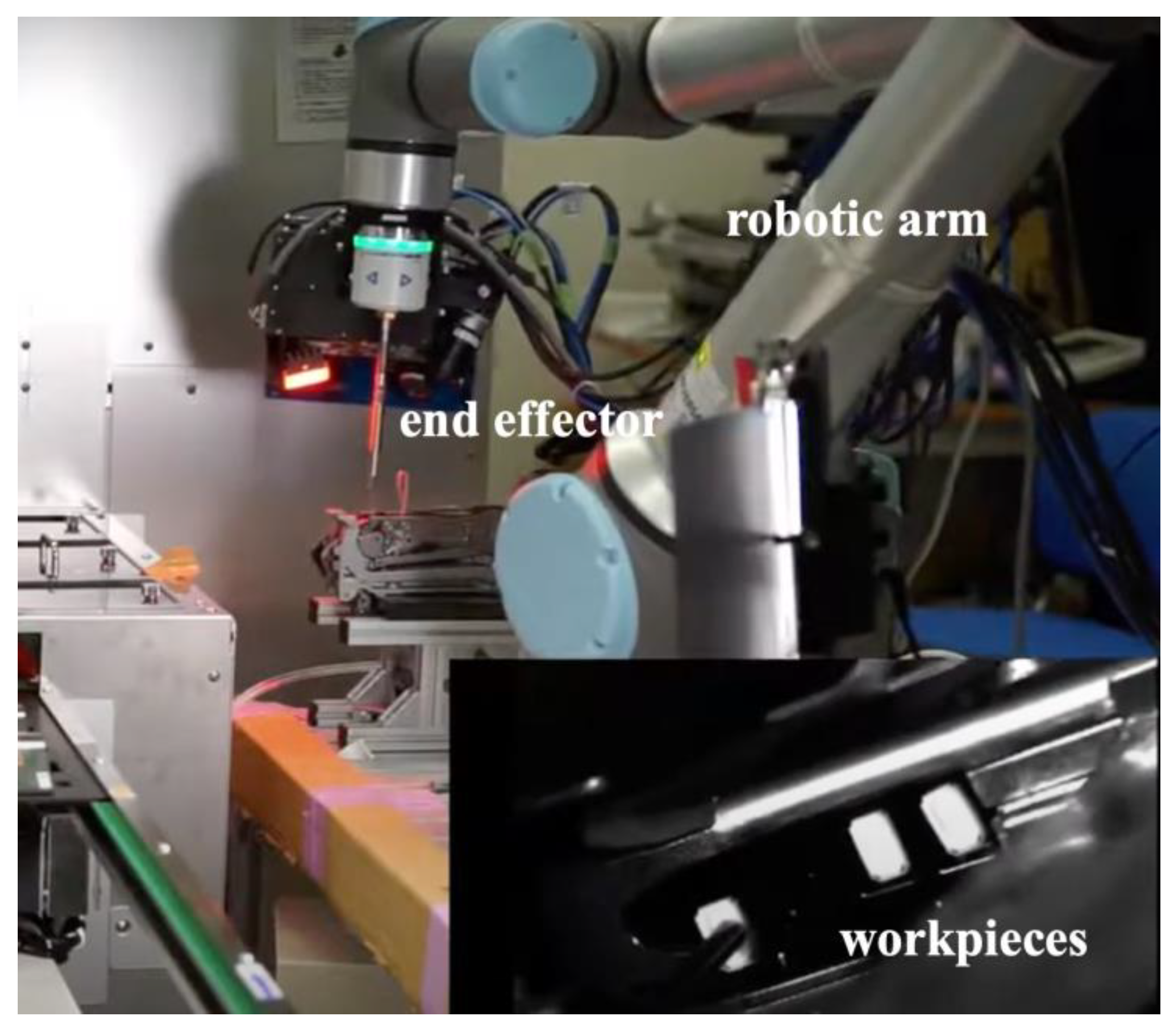
3.1. System Configuration
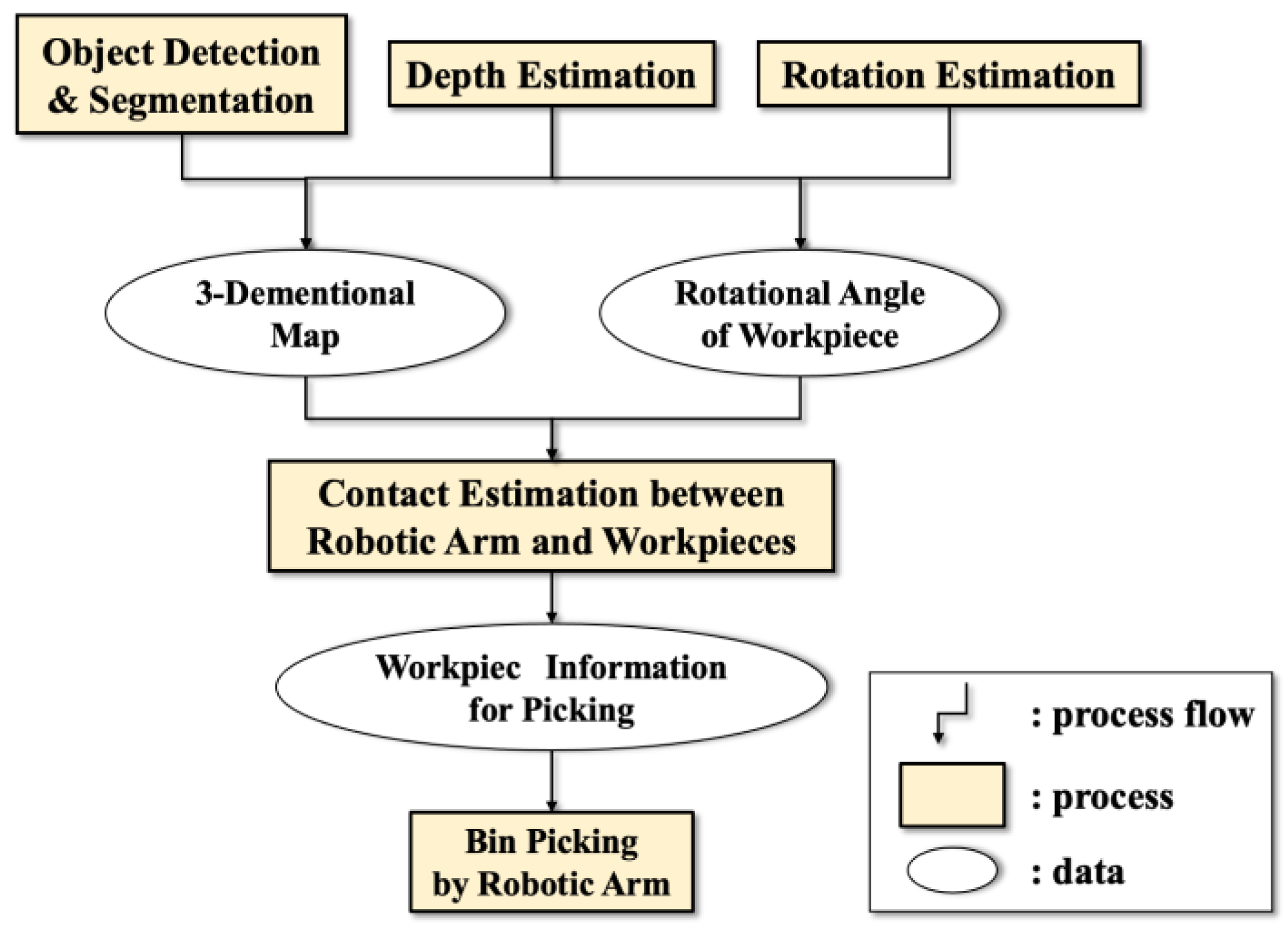
3.2. Process Flow
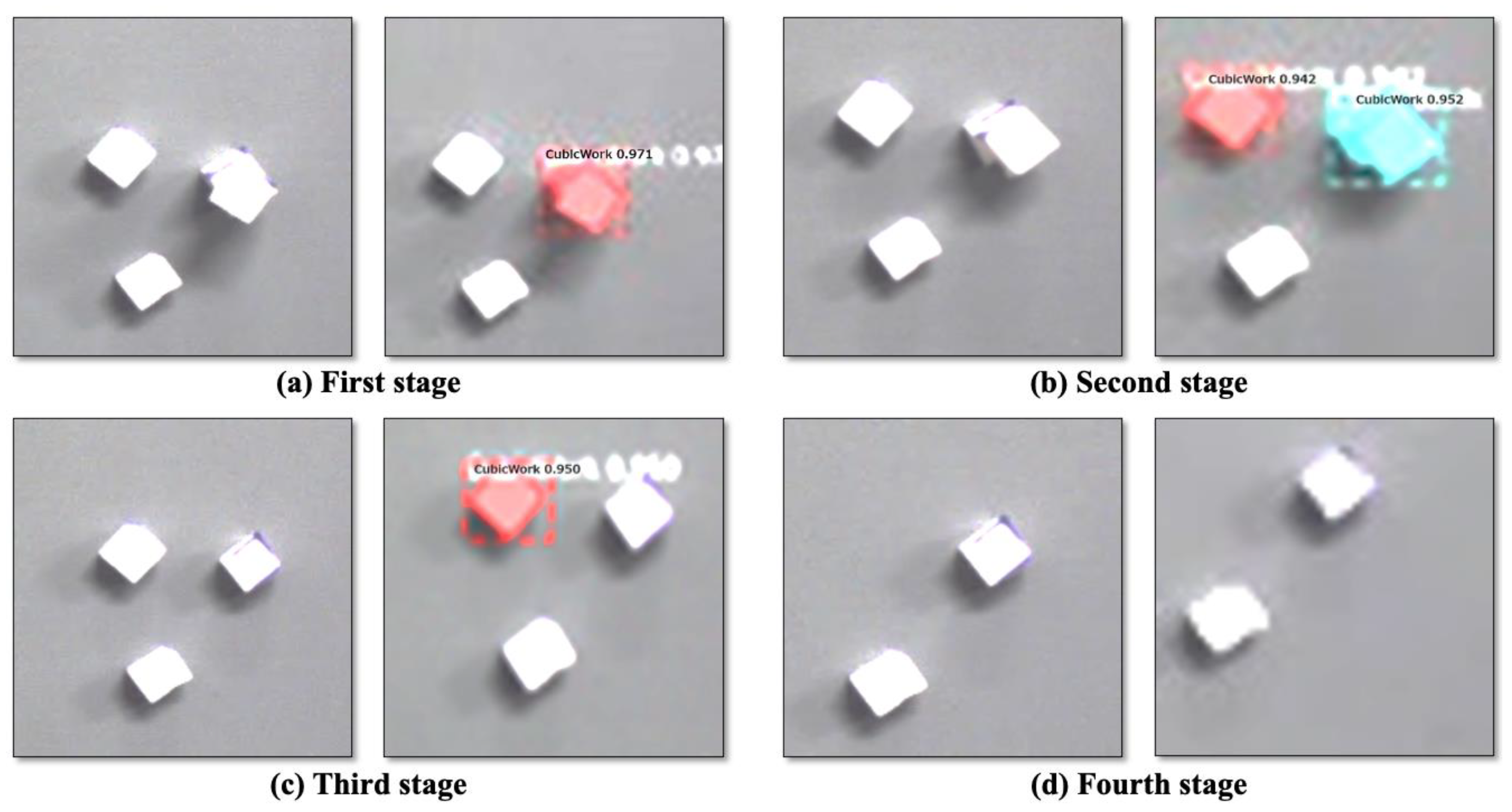
3.3. Object Detection and Segmentation
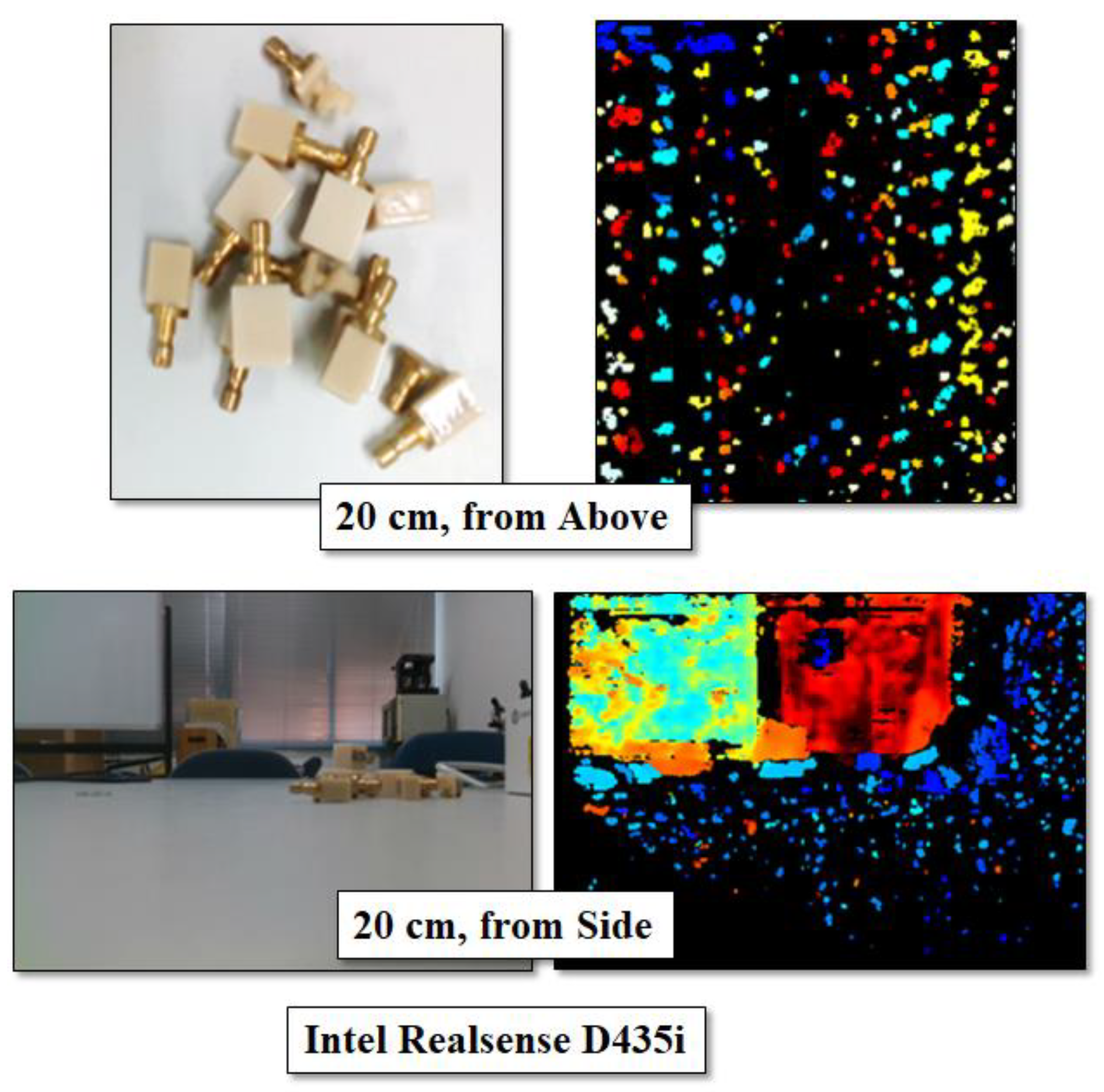
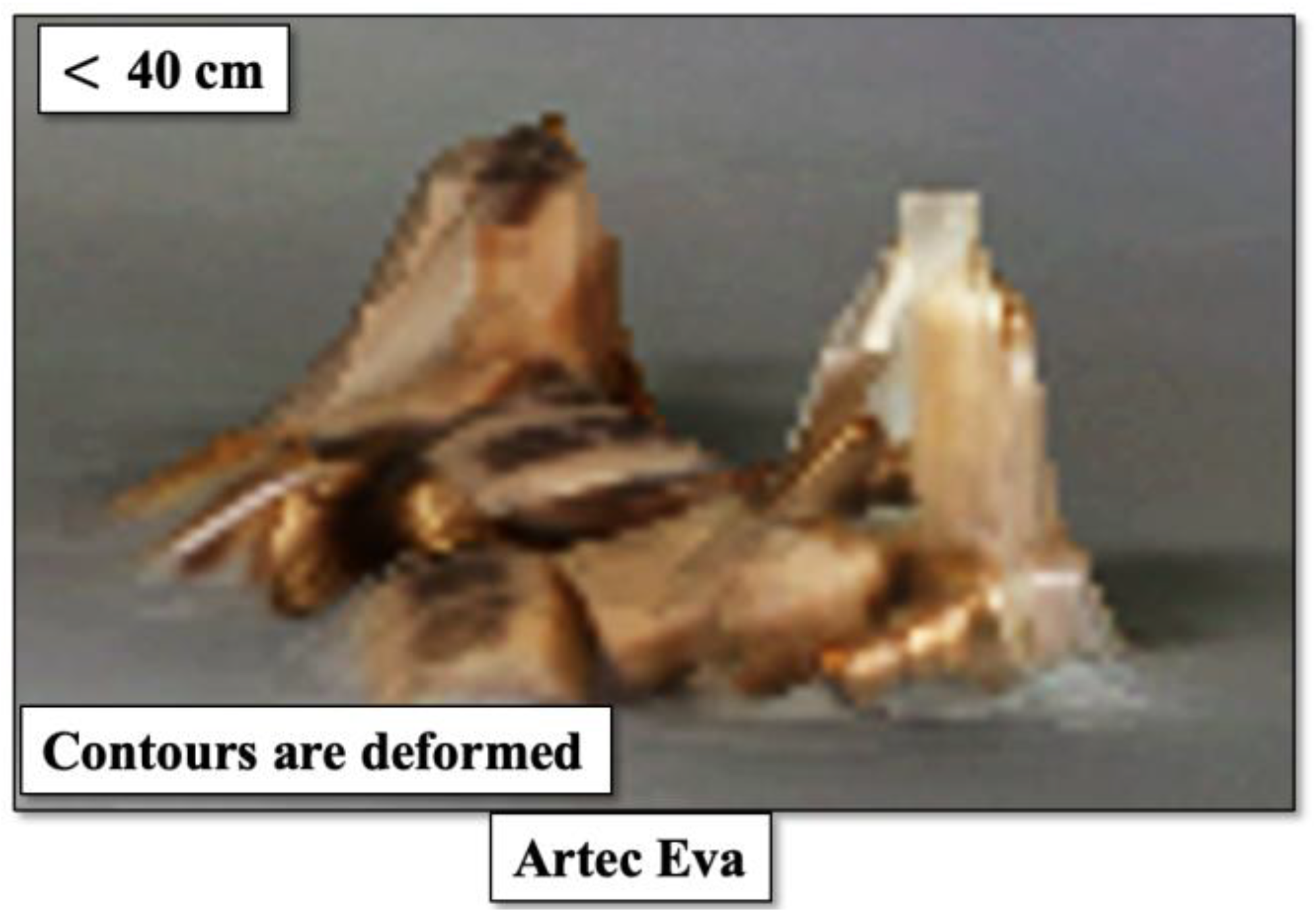
3.4. Depth Estimation
3.5. Rotational Angle of Workpieces
- (1)
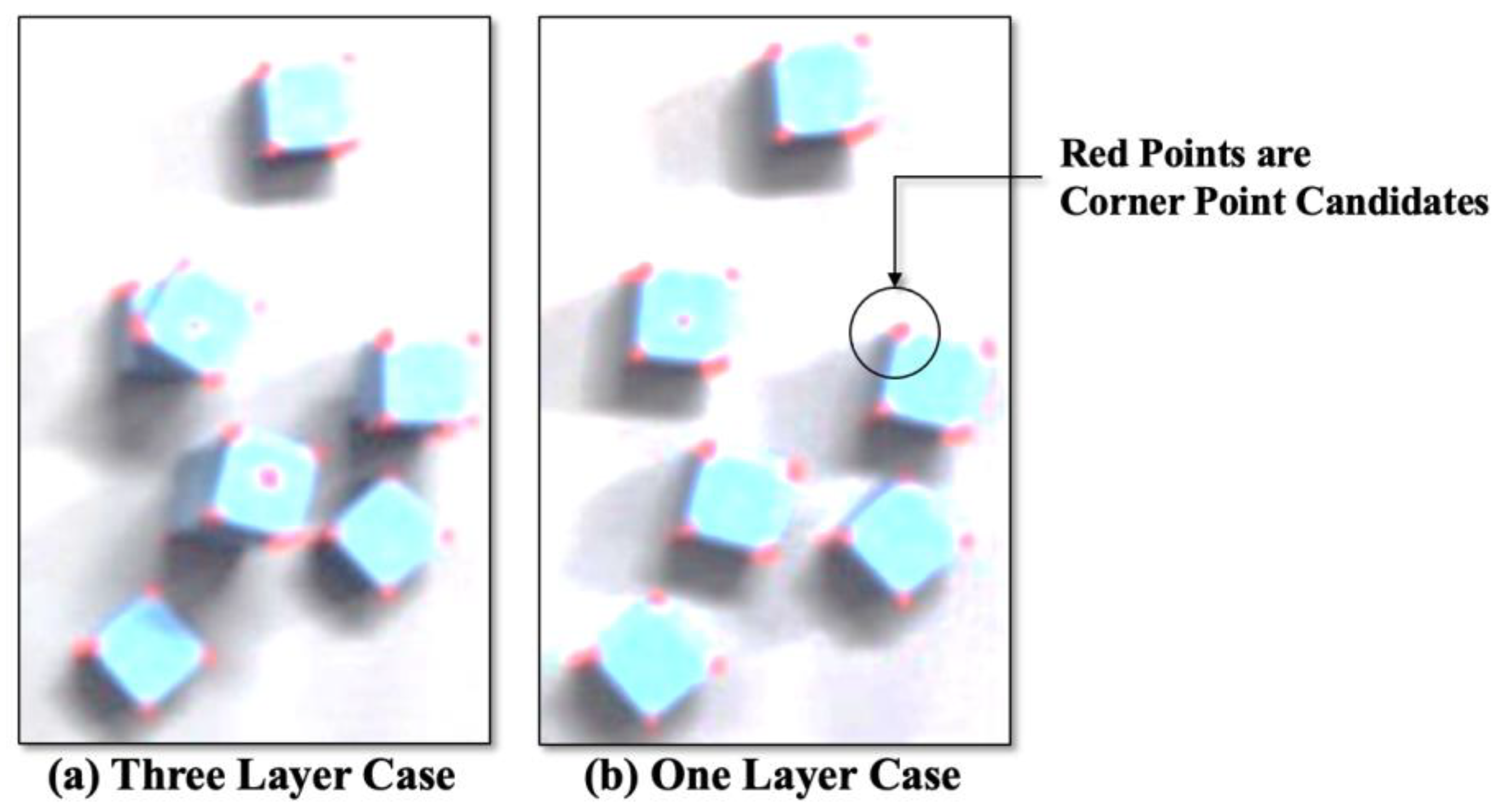
- Input the set of corner candidate points, C = {(c, y1s), (xmax, y2s), (x3s, ymin), (x4s, ymax)}, obtained using the Harris algorithm, where, for example, “(xmin, y1s)” means all points having xmin, xmax, and xmin, ymax are the minimum and maximum coordinates of x and y axes, respectively, in the set of corner candidate points;
- (2)
- Calculate the Euclidian distances of all pairs in C;
- (3)
- Sort all pairs in ascending order based on the distance calculated in (2);
- (4)
- Choose the top two corner candidate points included in the ordered list obtained in (3), as shown in Figure 9a;
- (5)
- Calculate the rotational angle with the horizontal axis in the four cases, as shown in Figure 9b.
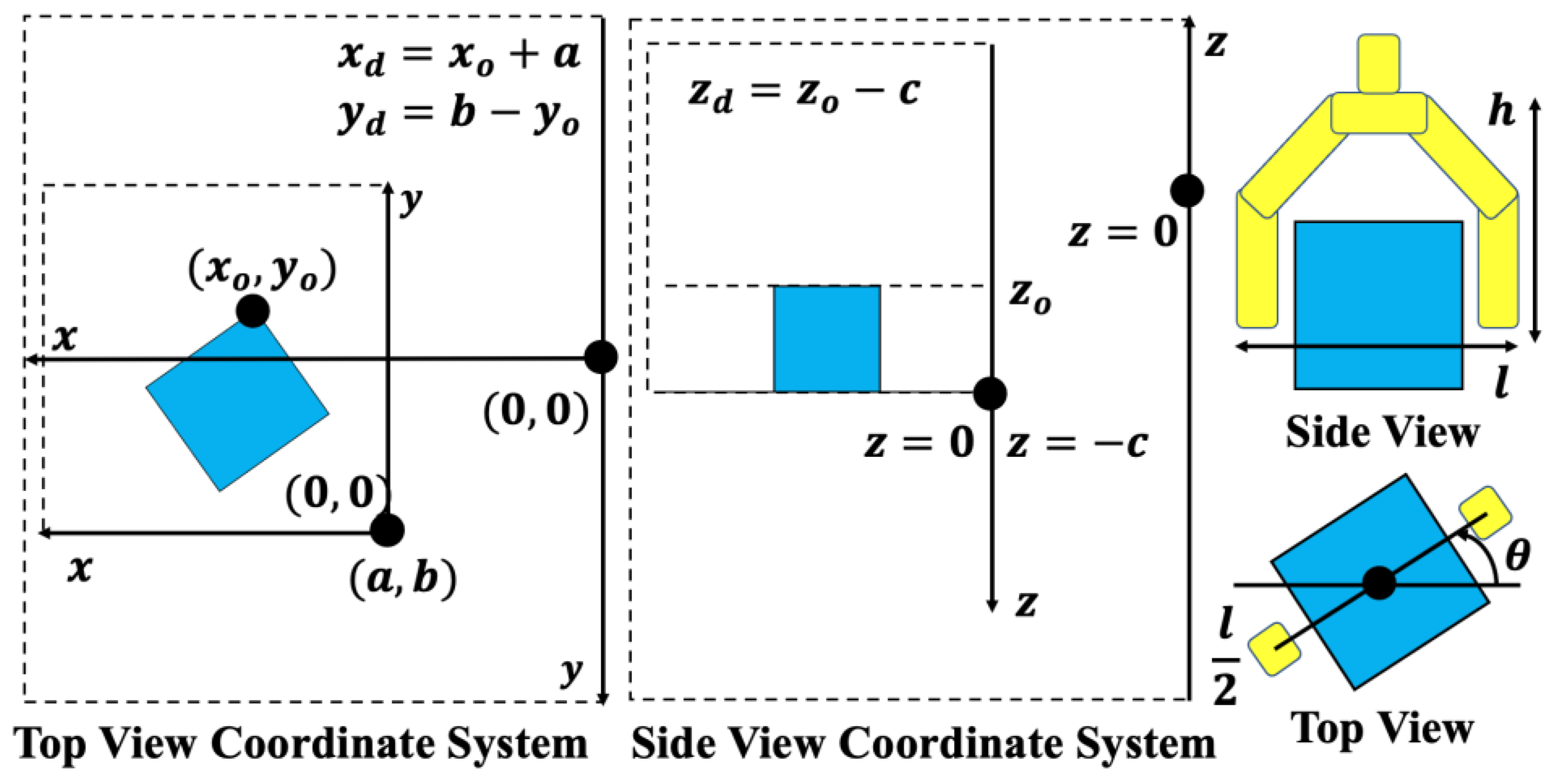
3.6. Contact Estimation of End Effector with Workpieces
4. Experimental Results
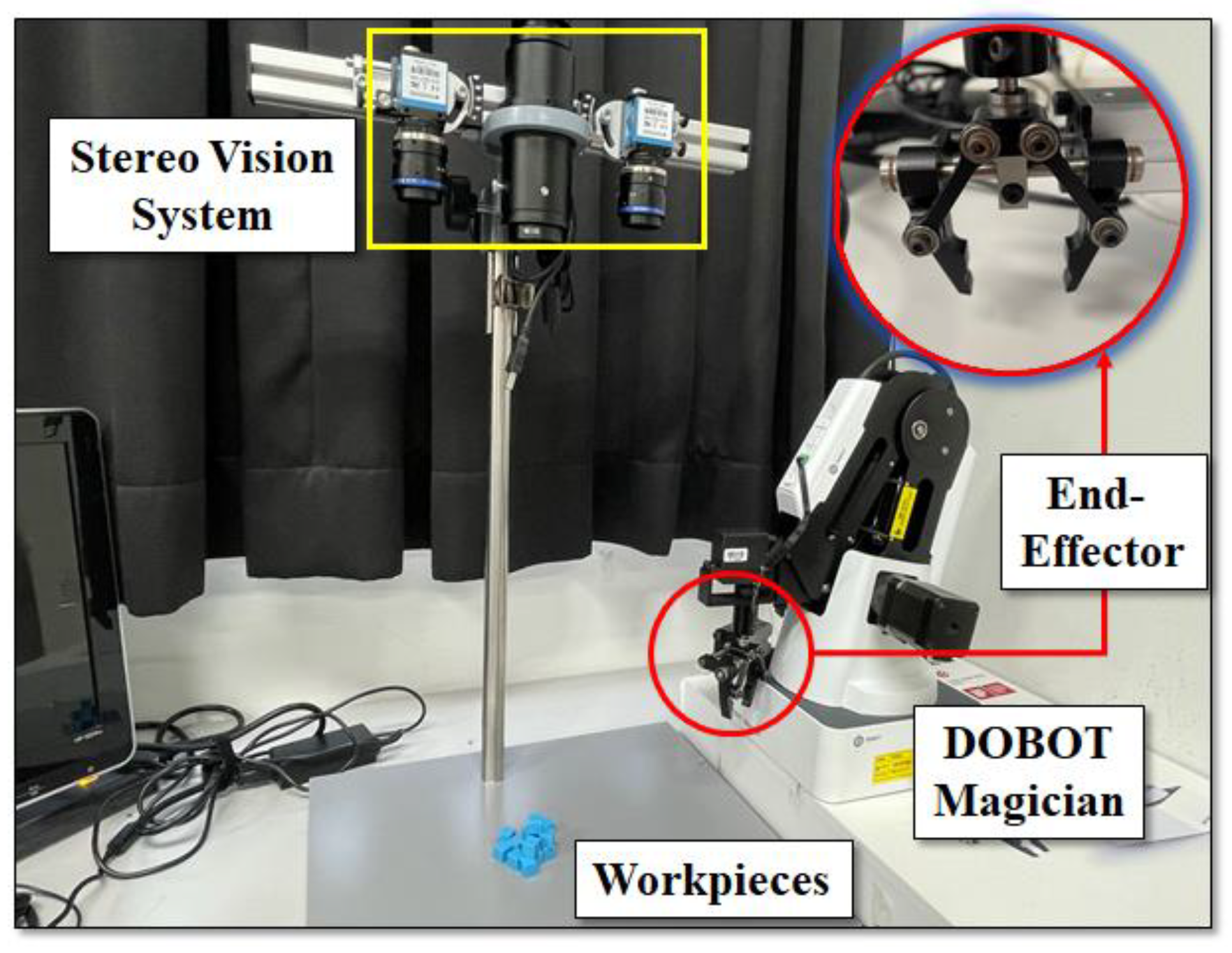
4.1. Experimental System
4.2. Evaluation Metrics of Depth Estimation
4.3. Object Detection and Instance Segmentation
4.4. Application of Enhanced Stereo Matching
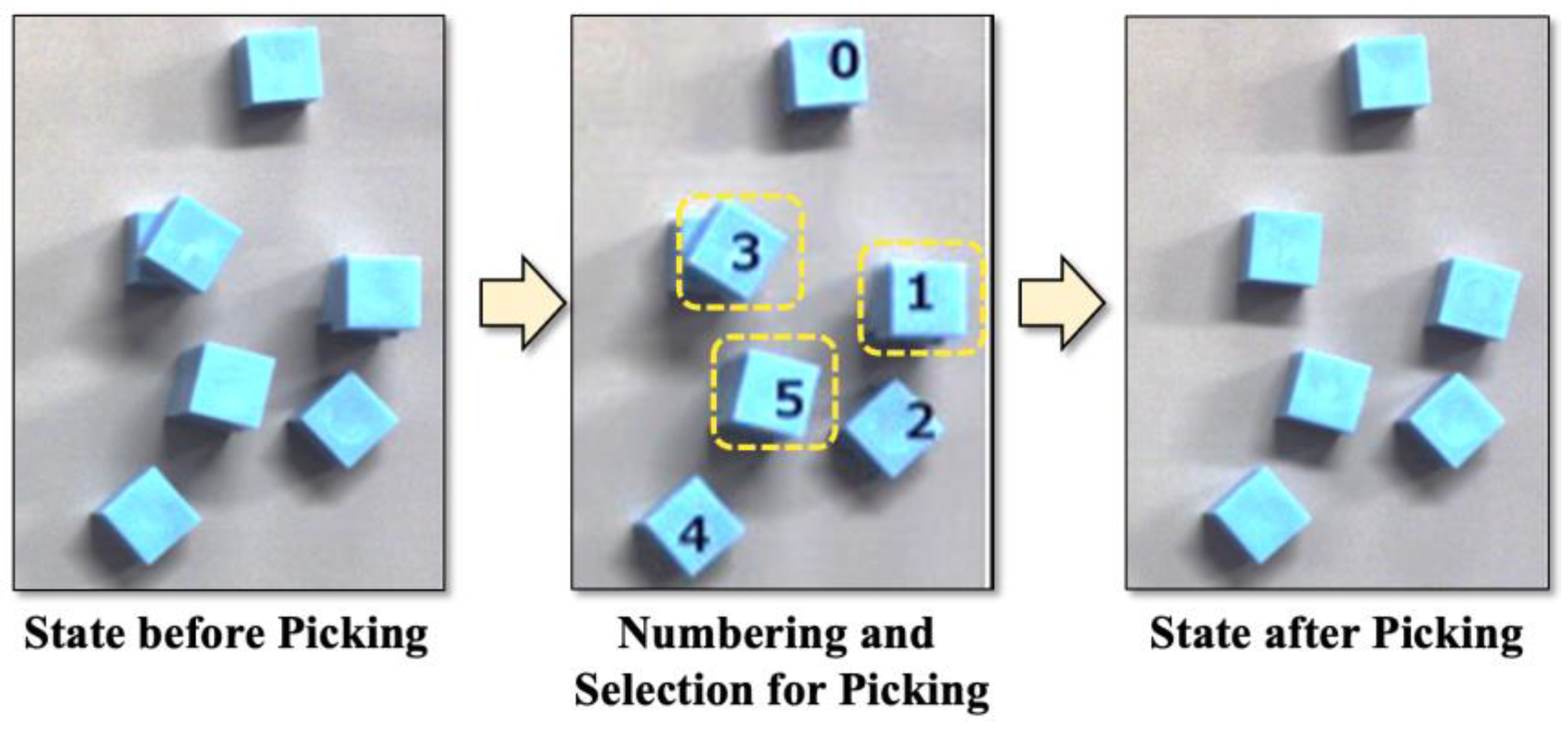
4.5. Bin Picking by Robotic Arm
4.6. Bin Picking Problem with Much Tinier Workpieces
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kievsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–99. [Google Scholar]
- Kumarasinghe, A.S.N.; Nakajima, A.; Motegi, K.; Shiraishi, Y. A Combination of Deep Learning and Segmentation Algorithms applied to Appearance Inspection Problem. In Proceedings of the 8th International Congress on Advanced Applied Informatics (AAI 2019), SCAI-4, Toyama, Japan, 7–11 July 2019. [Google Scholar]
- Intel Realsense Depth Camera D435i, Website, Intel. Available online: https://www.intel.com/content/www/us/en/products/sku/190004/intel-realsense-depth-camera-d435i/specifications.html (accessed on 14 August 2023).
- Nishi, T.; Yoshimi, T.; Takahashi, R.; Harada, K.; Nagata, K.; Shiraki, Y.; Kawai, Y. 3D Positioning Method by using 3D Camera and Scoring Method considering Grasping Possibility for Bin Picking. Inf. Process. Soc. Jpn. SIG Tech. Rep. 2014, CG-157, 1–6. [Google Scholar]
- Khalid, M.U.; Hager, J.M.; Kraus, W.; Huber, M.F.; Toussaint, M. Deep Workpiece Region Segmentation for Bin Picking. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019. [Google Scholar] [CrossRef]
- Sakata, S.; Shimizu, S.; Fukuda, M.; Shin, D. Study on Pick-Up Works Using Deep Learning; The Academic Reports; Tokyo Polytechnic University: Tokyo, Japan, 2020; Volume 43, pp. 10–14. [Google Scholar]
- Matsumoto, E.; Saito, M.; Kume, A.; Tan, J. End-to-end learning of object grasp poses in the Amazon Robotics Challenge. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Ly, P.H.; Nguyen, Q.C.; Nguyen, N.Y.H.; Pham, P.-H.; Hong, K.-S. Structured-Light-Based 3D Scanning System for Industrial Manipulator in Bin Picking Application. In Proceedings of the Australian & New Zealand Control Conference (ANZCC), Gold Coast, Australia, 24–25 November 2022. [Google Scholar]
- Madhusudanan, H.; Liu, X.; Chen, W.; Li, D.; Du, L.; Li, J.; Ge, J.; Sun, Y. Automated Eye-in-Hand Robot-3D Scanner Calibration for Low Stitching Errors. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Xu, Y.; Arai, S.; Tokuda, F.; Kosuge, K. A Convolutional Neural Network for Point Cloud Instance Segmentation in Cluttered Scene Trained by Synthetic Data without Color. IEEE Access 2022, 8, 70262–70269. [Google Scholar] [CrossRef]
- Buchholz, D.; Futterlieb, M.; Winkelbach, S.; Wahl, F.M. Efficient Bin-Picking and Grasp Planning Based on Depth Data. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Hyperspectral Imaging. Available online: https://en.wikipedia.org/wiki/Hyperspectral_imaging (accessed on 12 September 2023).
- Electromagnetic Spectrum. Available online: https://en.wikipedia.org/wiki/Electromagnetic_spectrum (accessed on 12 September 2023).
- Shaha, N.R.; Mauda, A.R.M.; Bhattia, F.A.; Alib, M.K.; Khurshida, K.; Maqsoodc, M.; Amind, M. Hyperspectral anomaly detection: A performance comparison of existing techniques. Int. J. Digit. Earth 2022, 15, 2078–2125. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, M.; Cheng, X.; Wang, L.; Xu, M.; Wang, H. Hyperspectral Anomaly Detection via Dual Dictionaries Construction Guided by Two-Stage Complementary Decision. Remote Sens. 2022, 14, 1784. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, M.; Cheng, X.; Zhou, K.; Zhao, S.; Wang, H. Collaborative Constraints Regularized Low-Rank and Sparse Representation via Robust Dictionaries Construction for Hyperspectral Anomaly Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 2009–2024. [Google Scholar] [CrossRef]
- Ayhan, B.; Dao, M.; Kwan, M.; Chen, H.-M.; Bell, J.F., III; Kidd, R. A Novel Utilization of Image Registration Techniques to Process Mastcam Images in Mars Rover with Applications to Image Fusion, Pixel Clustering, and Anomaly Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4553–4564. [Google Scholar] [CrossRef]
- Collins, R. Lecture 09: Stereo Algorithms. CSE486, Penn State. Available online: https://www.cse.psu.edu/~rtc12/CSE486/lecture09.pdf (accessed on 14 August 2023).
- Abdelaal, M.; Farag, R.M.A.; Saad, M.S.; Bahgat, A.; Emara, H.M.; El-Dessouki, A. Uncalibrated stereo vision with deep learning for 6-DOF pose estimation for a robot arm system. Robot. Auton. Syst. 2021, 145, 103847. [Google Scholar] [CrossRef]
- Example of a Part Being Mounted on a 3D Board Using a Robot. Available online: https://ngpd.nikon.com/en/robot-vision-system/implementation.html (accessed on 17 July 2023).
- Motoyuki, M.; Motegi, K.; Shiraishi, Y. An Application of Digital-Twin based Control to Anthropomorphic Robotic Hand. In Proceedings of the SICE Annual Conference 2022, Kumamoto, Japan, 6–9 September 2022; pp. 313–316. [Google Scholar]
- EniScan Pro HD. Available online: https://www.einscan.com/support/einscan-trade-in-program/ (accessed on 10 August 2023).
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2017, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 1 January 1988; Volume 15, pp. 147–151. [Google Scholar] [CrossRef]
- USB 3.0 Color Industrial Camera. Available online: https://www.theimagingsource.com/products/industrial-cameras/usb-3.0-color/dfk33up1300/ (accessed on 14 August 2023).
- DOBOT Magician. Available online: https://www.dobot.cc/dobot-magician/product-overview.html (accessed on 14 August 2023).
- Dutta, A.; Gupta, A.; Zisserman, A. VGG Image Annotator (VIA). Available online: https://www.robots.ox.ac.uk/~vgg/software/via/ (accessed on 14 August 2023).
- IC 3D—User Friendly Stereo Calibration, Depth Estimation and 3D Visualization. Available online: https://www.theimagingsource.com/support/downloads-for-windows/end-user-software/ic3d/ (accessed on 14 August 2023).
- OpenCV, Harris Corner Detection. Available online: https://docs.opencv.org/4.x/dc/d0d/tutorial_py_features_harris.html (accessed on 14 August 2023).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Coordinates mm | Estimated Layer Number (EL) | Angle [deg] | Contacts | ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| 0 | 222 | 47 | 22 | 2 | no | |
| 1 | 208 | 19 | 12 | 1 | no | |
| 2 | 218 | 69 | 12 | 1 | no | |
| 3 | 196 | 43 | 21 | 2 | no | |
| 4 | 202 | 61 | 31 | 3 | 83 | no |
| 5 | 190 | 82 | 10 | 1 | no | |
| No. | Coordinates mm | Estimated Layer Number (EL) | Angle [deg] | Contacts | ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| 0 | 208 | 19 | 13 | 1 | no | |
| 1 | 222 | 51 | 22 | 2 | 84 | no |
| 2 | 218 | 69 | 12 | 1 | no | |
| 3 | 195 | 44 | 21 | 2 | 54 | cc:5 |
| 4 | 190 | 83 | 10 | 1 | no | |
| 5 | 201 | 64 | 21 | 1 | 77 | cc:3 |
| No. | Coordinates mm | Estimated Layer Number (EL) | Angle [deg] | Contacts | ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| 0 | 193 | 41 | 11 | 1 | 25 | cc:5 |
| 1 | 208 | 19 | 12 | 1 | 14 | no |
| 2 | 221 | 48 | 12 | 1 | 73 | cc:1 |
| 3 | 218 | 69 | 12 | 1 | 42 | cc:0 |
| 4 | 190 | 82 | 10 | 1 | 43 | c:2 |
| 5 | 195 | 65 | 11 | 1 | 77 | c:4 or cc:0 |
| No. | Coordinates mm | Estimated Layer Number (EL) | Angle [deg] | Contacts | ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| First stage | ||||||
| 0 | 196 | 100 | 16 | 3 | 41 | no |
| Second stage | ||||||
| 0 | 196 | 99 | 9 | 2 | 32 | no |
| 1 | 181 | 97 | 6 | 1 | 50 | no |
| Third stage | ||||||
| 0 | 181 | 97 | 6 | 1 | 50 | no |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshizawa, M.; Motegi, K.; Shiraishi, Y. A Deep Learning-Enhanced Stereo Matching Method and Its Application to Bin Picking Problems Involving Tiny Cubic Workpieces. Electronics 2023, 12, 3978. https://doi.org/10.3390/electronics12183978
Yoshizawa M, Motegi K, Shiraishi Y. A Deep Learning-Enhanced Stereo Matching Method and Its Application to Bin Picking Problems Involving Tiny Cubic Workpieces. Electronics. 2023; 12(18):3978. https://doi.org/10.3390/electronics12183978
Chicago/Turabian StyleYoshizawa, Masaru, Kazuhiro Motegi, and Yoichi Shiraishi. 2023. "A Deep Learning-Enhanced Stereo Matching Method and Its Application to Bin Picking Problems Involving Tiny Cubic Workpieces" Electronics 12, no. 18: 3978. https://doi.org/10.3390/electronics12183978
APA StyleYoshizawa, M., Motegi, K., & Shiraishi, Y. (2023). A Deep Learning-Enhanced Stereo Matching Method and Its Application to Bin Picking Problems Involving Tiny Cubic Workpieces. Electronics, 12(18), 3978. https://doi.org/10.3390/electronics12183978