
Target Localization and Grasping of NAO Robot Based on YOLOv8 Network and Monocular Ranging


Abstract
:1. Introduction
2. Target Recognition and Localization Technology
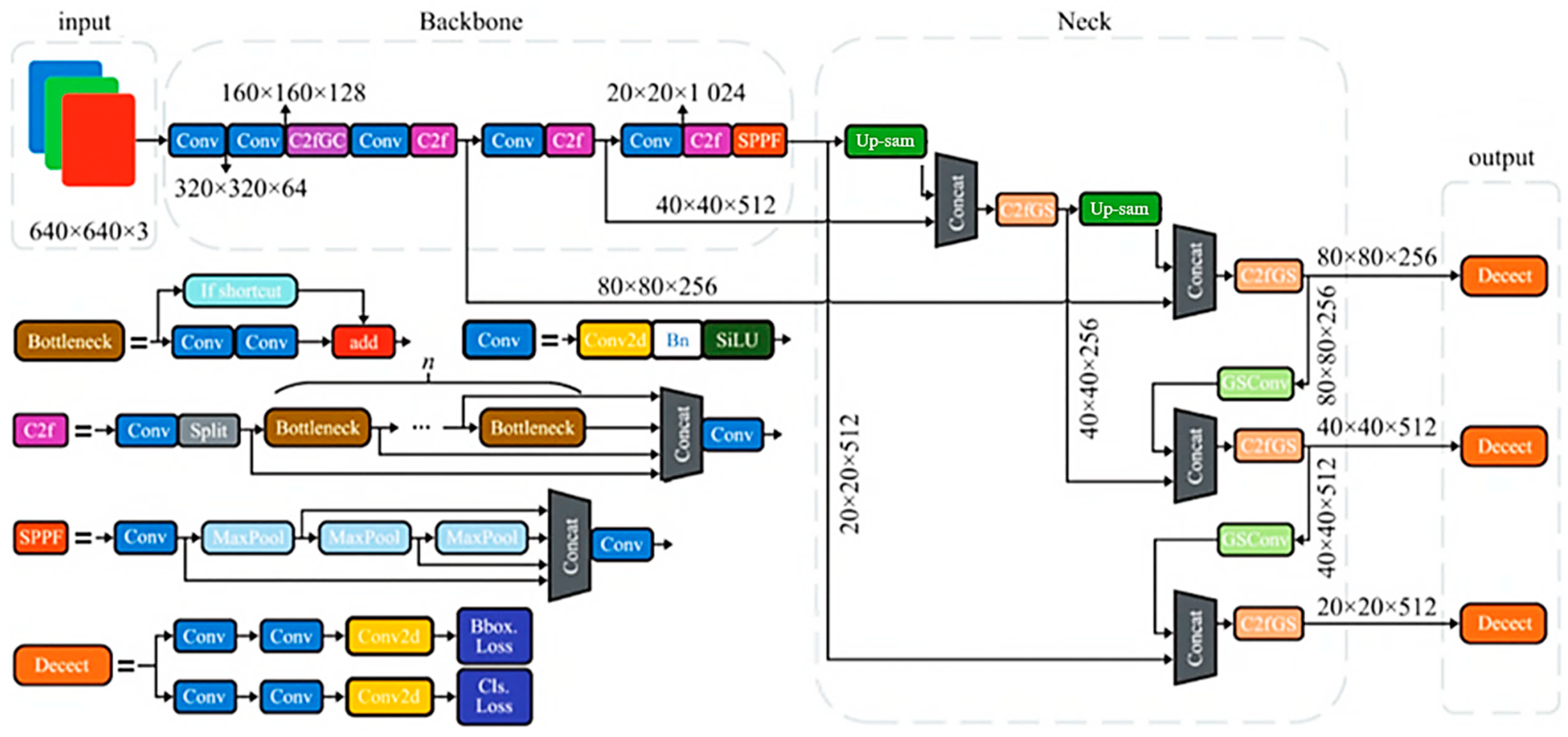
2.1. Target Recognition Based on YOLOv8 Network
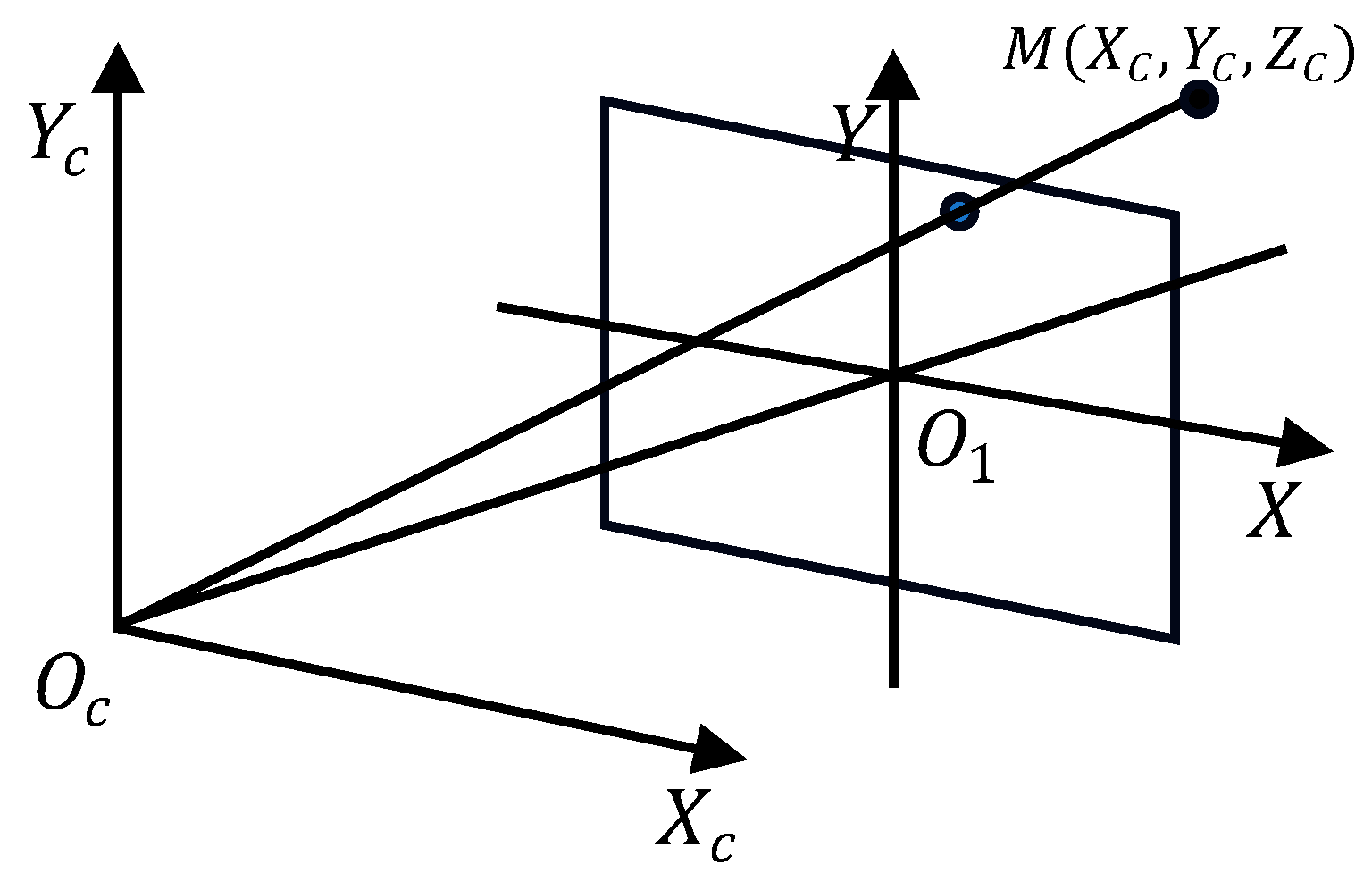
2.2. Modeling of Monocular Ranging
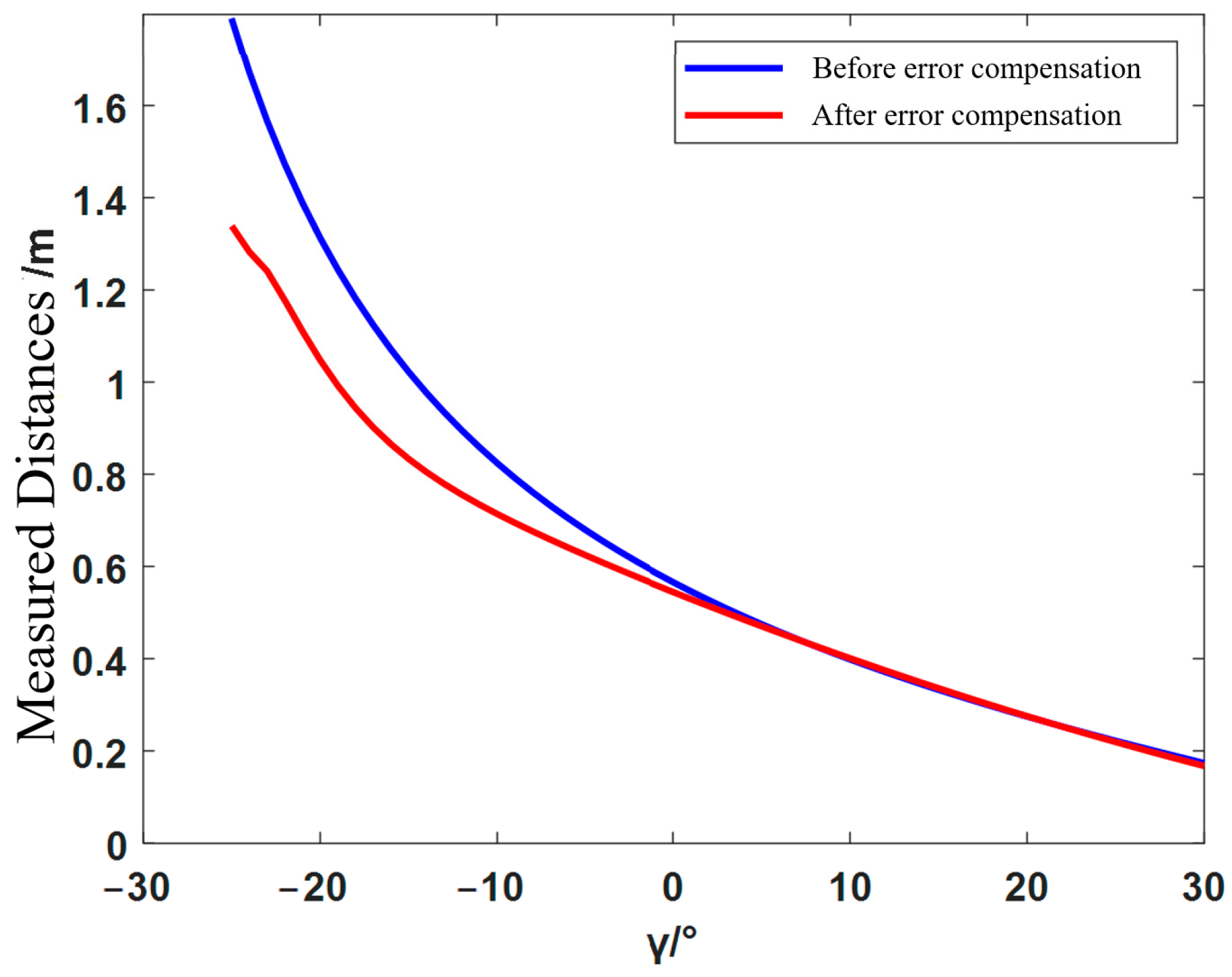
3. Modeling Visual Distance Error Compensation
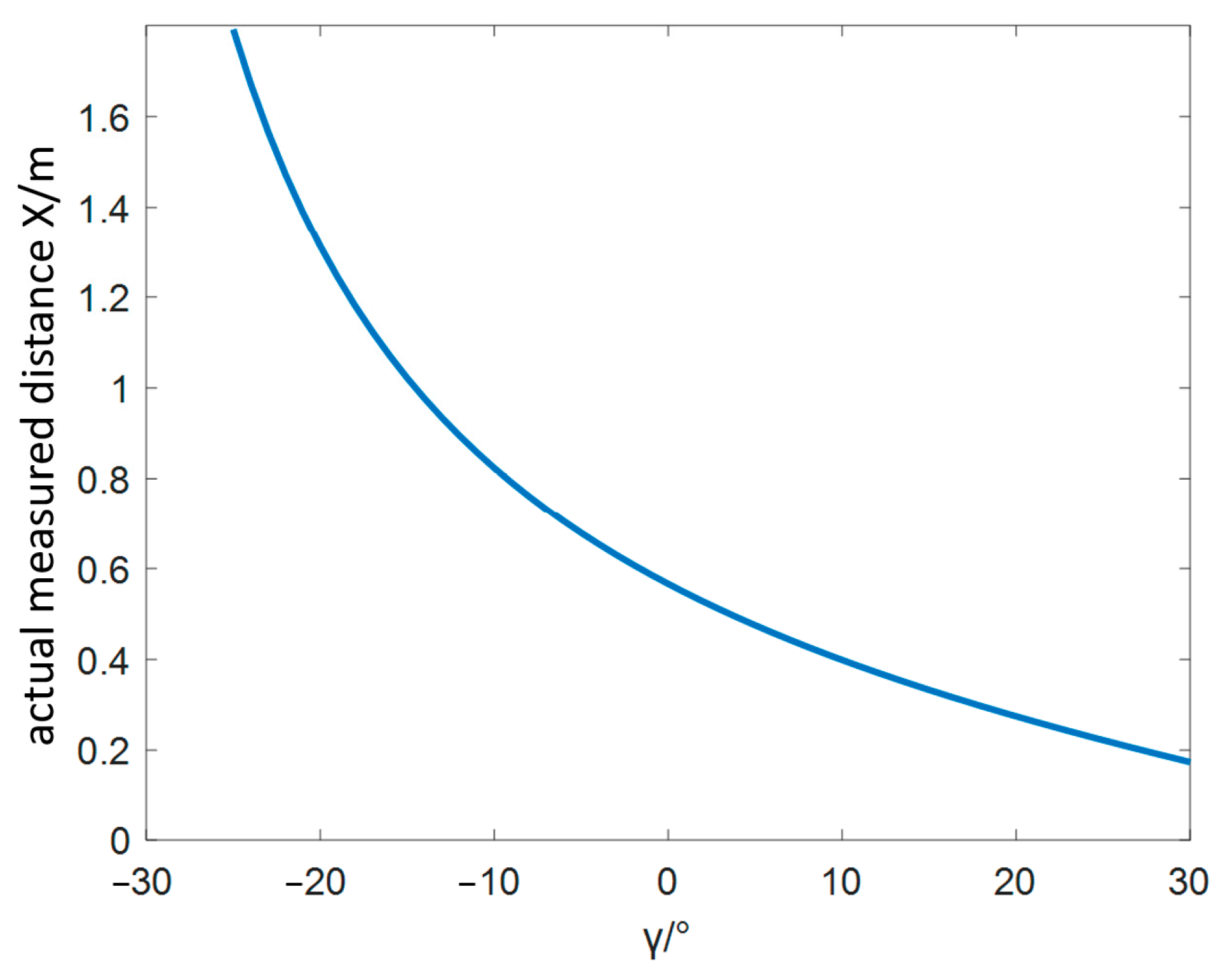
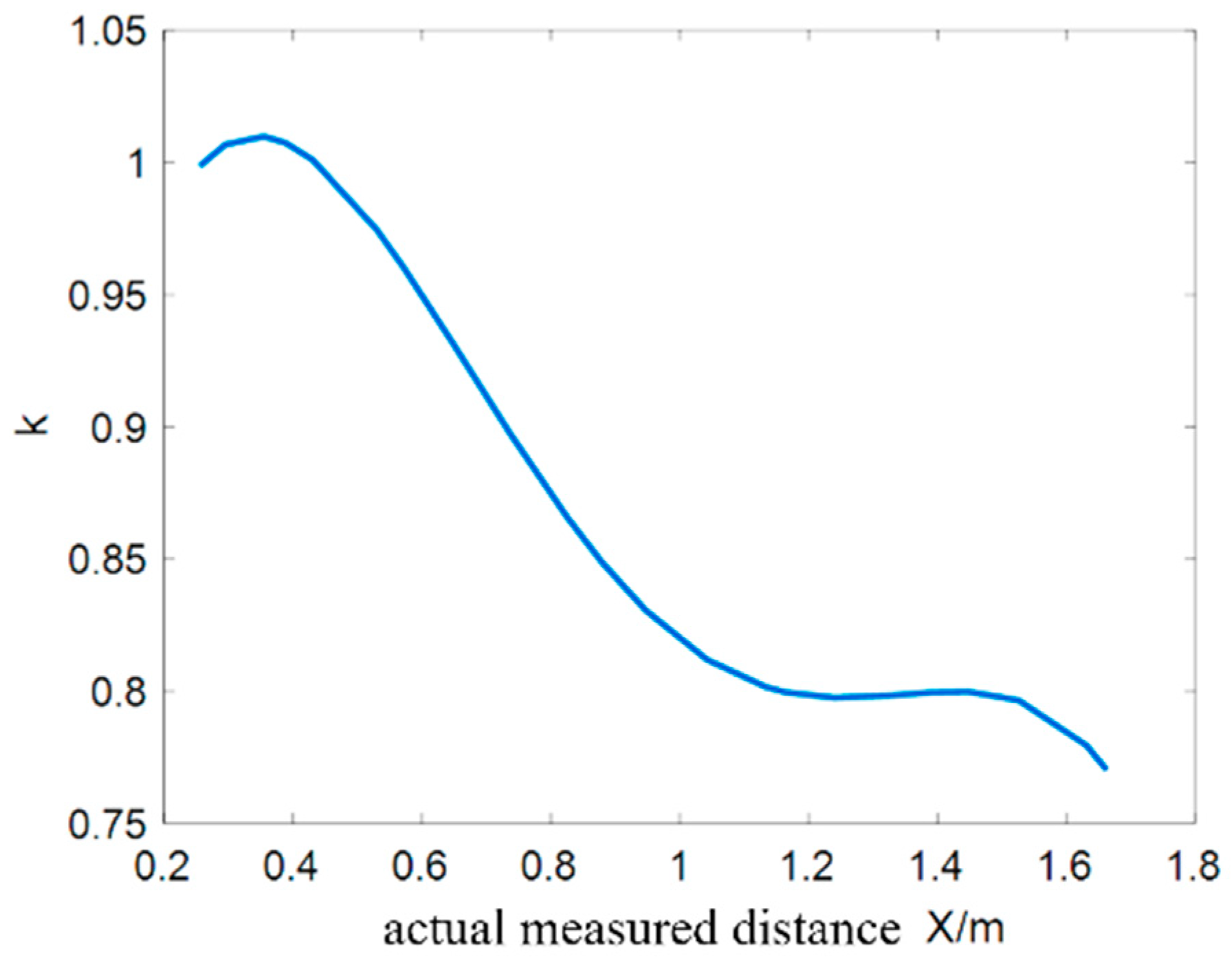
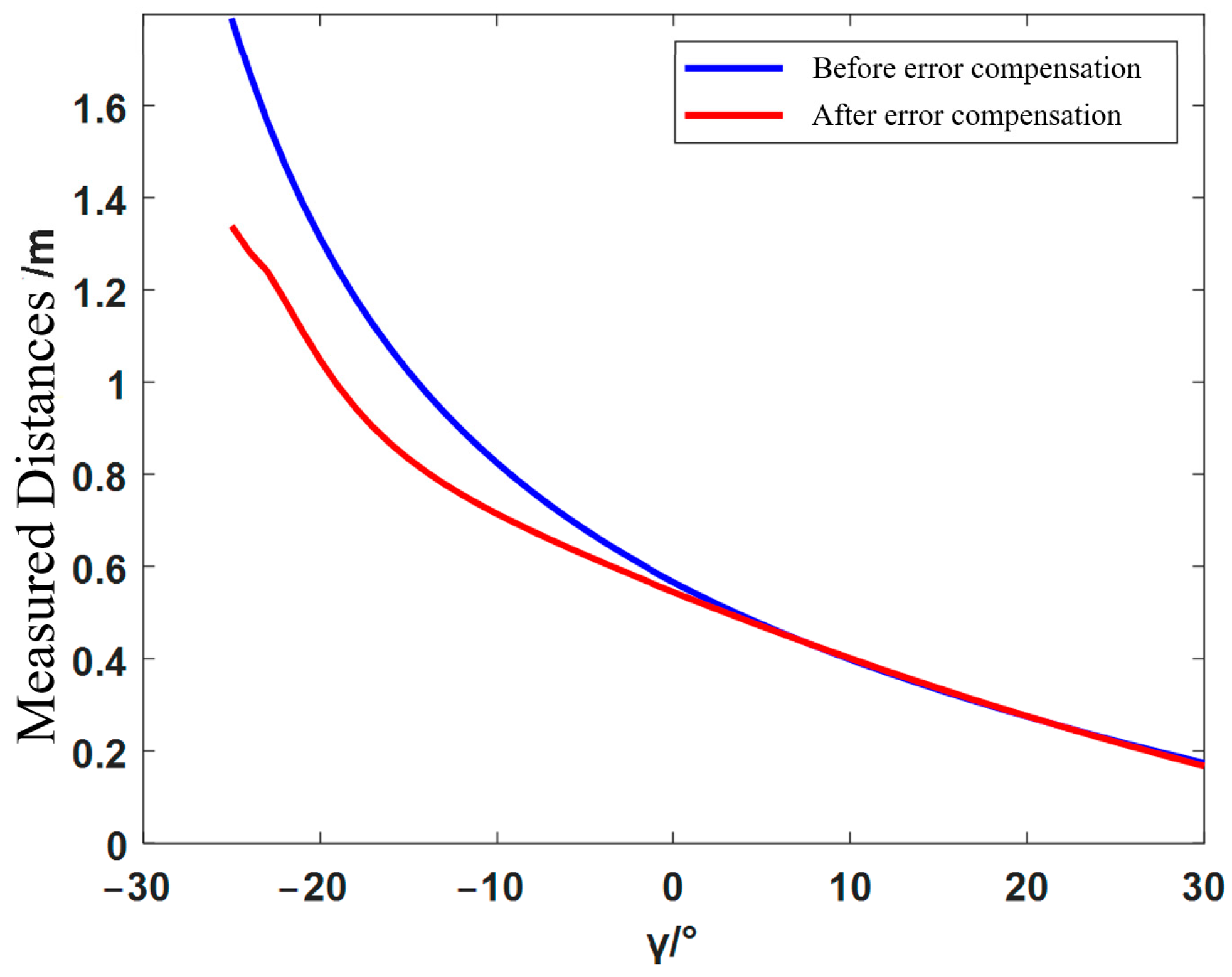
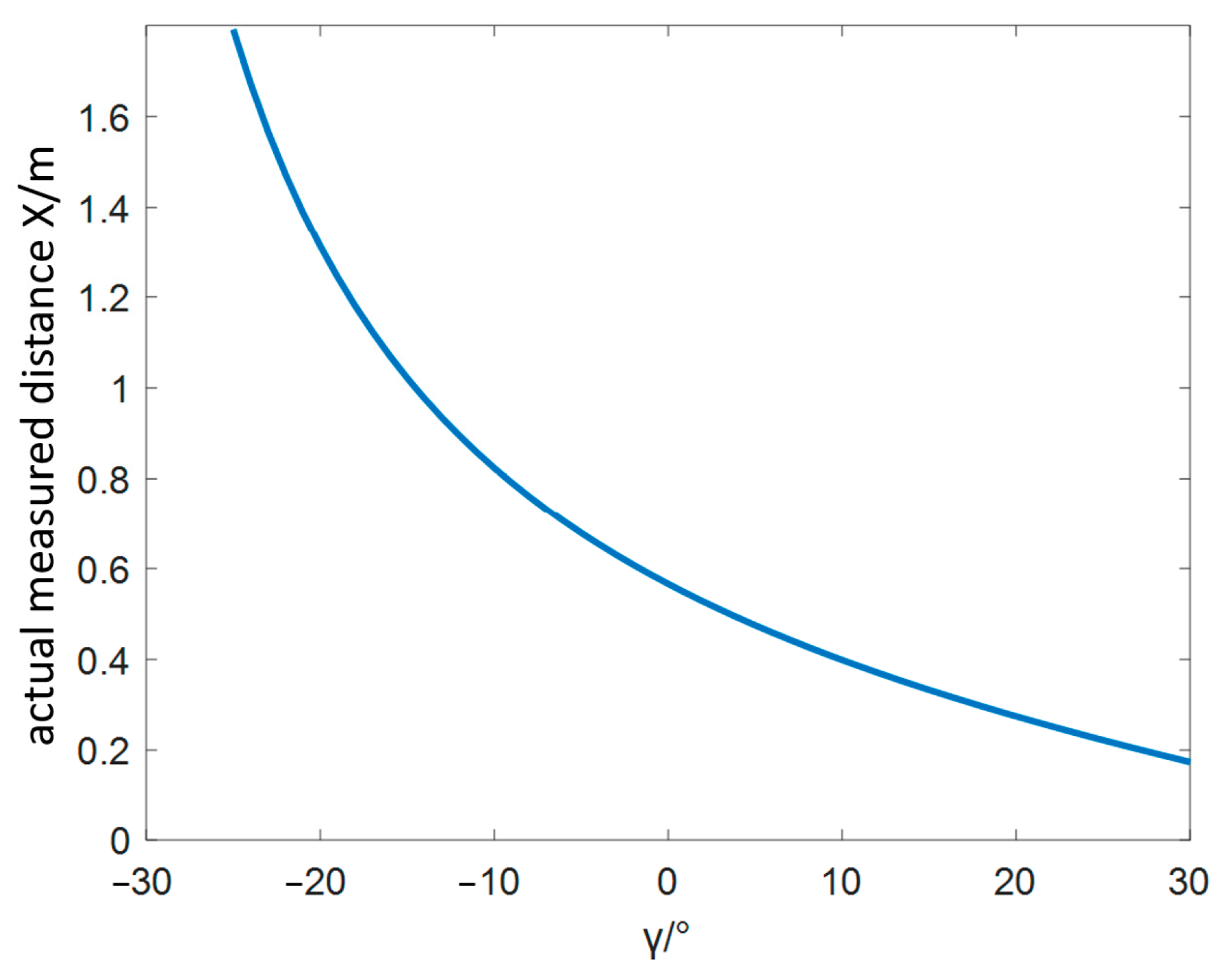
3.1. Error Analysis
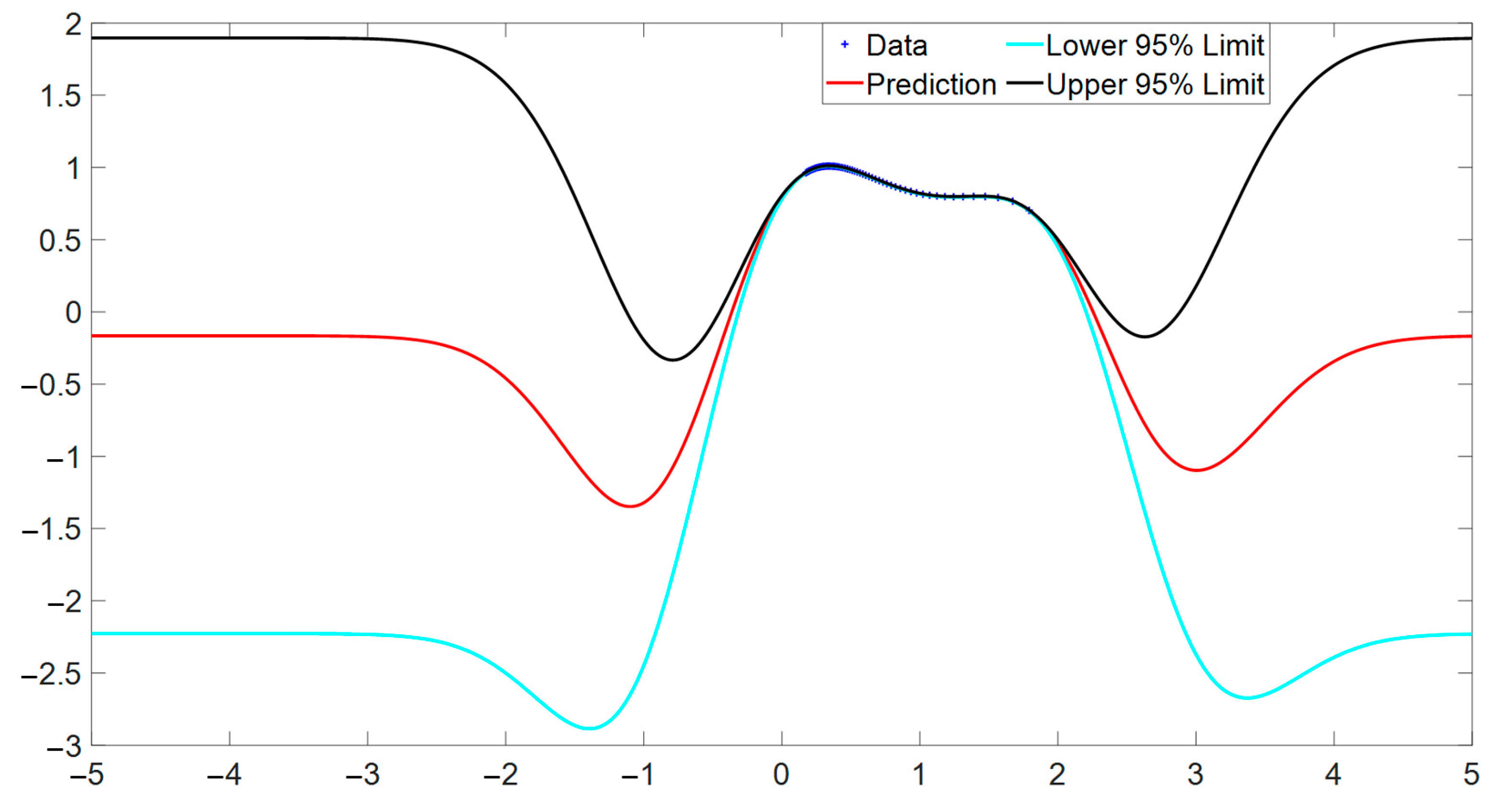
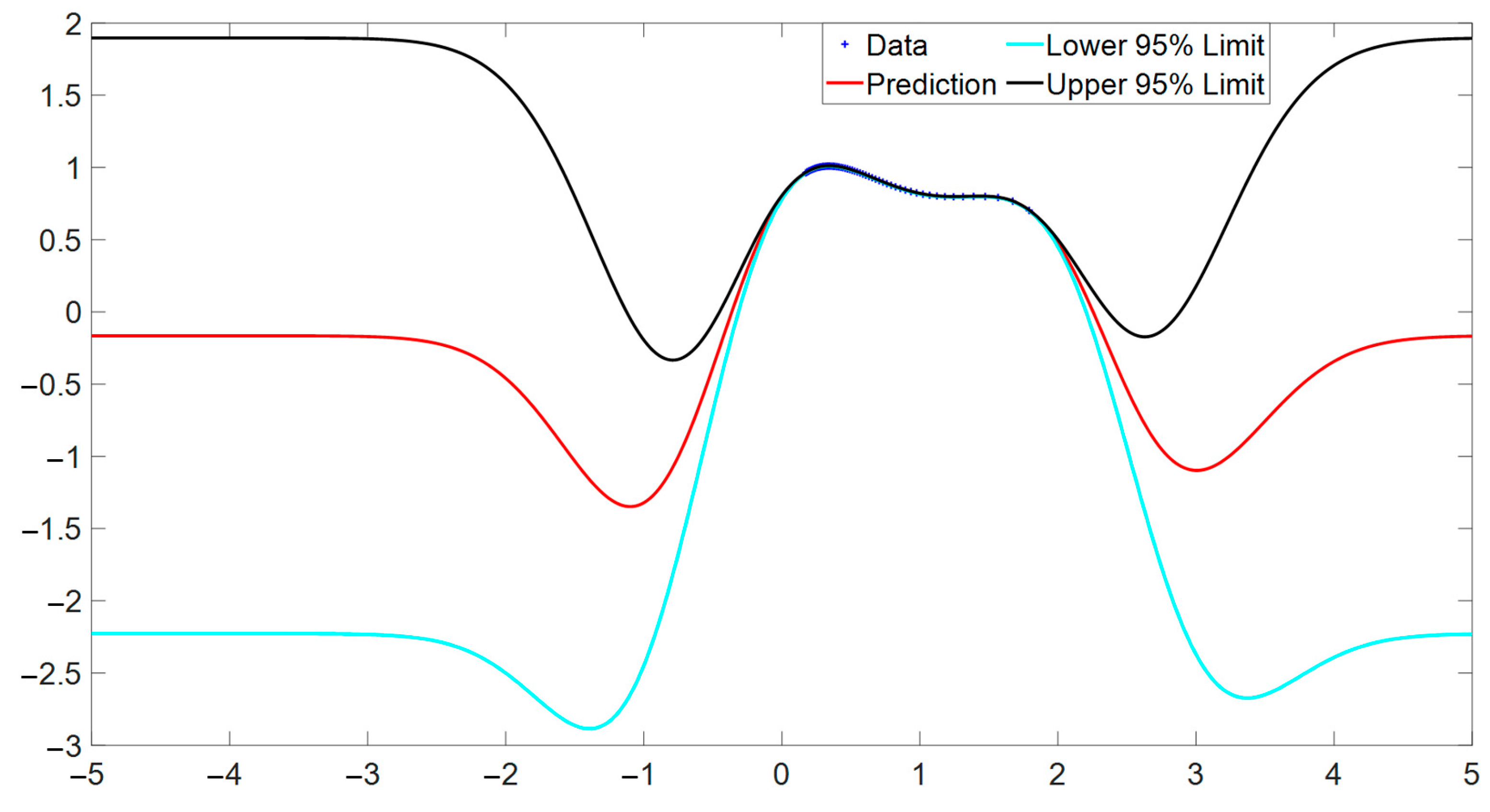
3.2. Gaussian Process Regression Model
4. Pose-Interpolated Grasping Control Strategy
4.1. Linear Path Interpolation
4.2. Position Interpolation
4.3. Pose Interpolation
5. Experiments and Results Analysis
5.1. The NAO Robot Platform
5.2. Object Detection Experiment
5.3. Object Grasping Experiment
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Notations and Abbreviations
References
- Liu, H.; Wu, B.; Li, J. The development process and social significance of humanoid robot. Public Commun. Sci. Technol. 2020, 12, 109–111. [Google Scholar]
- Zhang, L.; Zhang, H.; Yang, H.; Bian, G.B.; Wu, W. Multi-target detection and grasping control for humanoid robot NAO. Int. J. Adapt. Control. Signal Process. 2019, 33, 1225–1237. [Google Scholar] [CrossRef]
- Huang, M.; Liu, Z.; Liu, T.; Wang, J. CCDS-YOLO: Multi-Category Synthetic Aperture Radar Image Object Detection Model Based on YOLOv5s. Electronics 2023, 12, 3497. [Google Scholar] [CrossRef]
- Tan, L.; Lv, X.; Lian, X.; Wang, G. YOLOv4_Drone: UAV image target detection based on an improved YOLOv4 algorithm. Comput. Electr. Eng. 2021, 93, 107261. [Google Scholar] [CrossRef]
- Tian, M.; Li, X.; Kong, S.; Wu, L.; Yu, J. A modified YOLOv4 detection method for a vision-based underwater garbage cleaning robot. Front. Inf. Technol. Electron. Eng. 2022, 23, 1217–1228. [Google Scholar] [CrossRef]
- Fu, H.; Song, G.; Wang, Y. Improved YOLOv4 marine target detection combined with CBAM. Symmetry 2021, 13, 623. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, X.; Lin, Q.; Shan, J.; Jia, S.; Ye, W. A high-accuracy positioning method for mobile robotic grasping with monocular vision and long-distance deviation. Measurement 2023, 215, 112829. [Google Scholar] [CrossRef]
- Liang, Z. Research on Target Grabbing Technology Based on NAO Robot. Master’s Thesis, ChangChun University of Technology, ChangChun, China, 2021. [Google Scholar] [CrossRef]
- Jin, Y.; Wen, S.; Shi, Z.; Li, H. Target Recognition and Navigation Path Optimization Based on NAO Robot. Appl. Sci. 2022, 12, 8466. [Google Scholar] [CrossRef]
- Terven, J.; Cordova-Esparza, D. A comprehensive review of YOLO: From YOLOv1 to YOLOv8 and beyond. arXiv 2023, arXiv:2304.00501. [Google Scholar] [CrossRef]
- Li, Y.; Fan, Q.; Huang, H.; Han, Z.; Gu, Q. A Modified YOLOv8 Detection Network for UAV Aerial Image Recognition. Drones 2023, 7, 304. [Google Scholar] [CrossRef]
- He, M.; Zhu, C.; Huang, Q.; Ren, B.; Liu, J. A review of monocular visual odometry. Vis. Comput. 2020, 36, 1053–1065. [Google Scholar] [CrossRef]
- Kim, M.; Kim, J.; Jung, M.; Oh, H. Towards monocular vision-based autonomous flight through deep reinforcement learning. Expert Syst. Appl. 2022, 198, 116742. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Liu, Z.; Zuo, S.; Cai, C.; Yang, J.; Yang, J. A monocular vision-based decoupling measurement method for plane motion orbits. Measurement 2022, 187, 110312. [Google Scholar] [CrossRef]
- Yu, H.; Li, X.; Feng, Y.; Han, S. Multiple attentional path aggregation network for marine object detection. Appl. Intell. 2023, 53, 2434–2451. [Google Scholar] [CrossRef]
- Feng, C.; Zhong, Y.; Gao, Y.; Scott, M.R.; Huang, W. Tood: Task-aligned one-stage object detection. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021; pp. 3490–3499. [Google Scholar]
- Li, X.; Wang, W.; Wu, L.; Chen, S.; Hu, X.; Li, J.; Yang, J. Generalized focal loss: Learning qualified and distributed bounding boxes for dense object detection. Adv. Neural Inf. Process. Syst. 2020, 33, 21002–21012. [Google Scholar]
- He, Z.; Fang, L.; Liu, W.; Chi, Y.; Wang, Y.; Fu, J.; Xiong, B. Short-term runoff prediction based on exponential kernel Gaussian Process Regression. China Rural. Water Hydropower 2023, 8, 25–31. [Google Scholar]
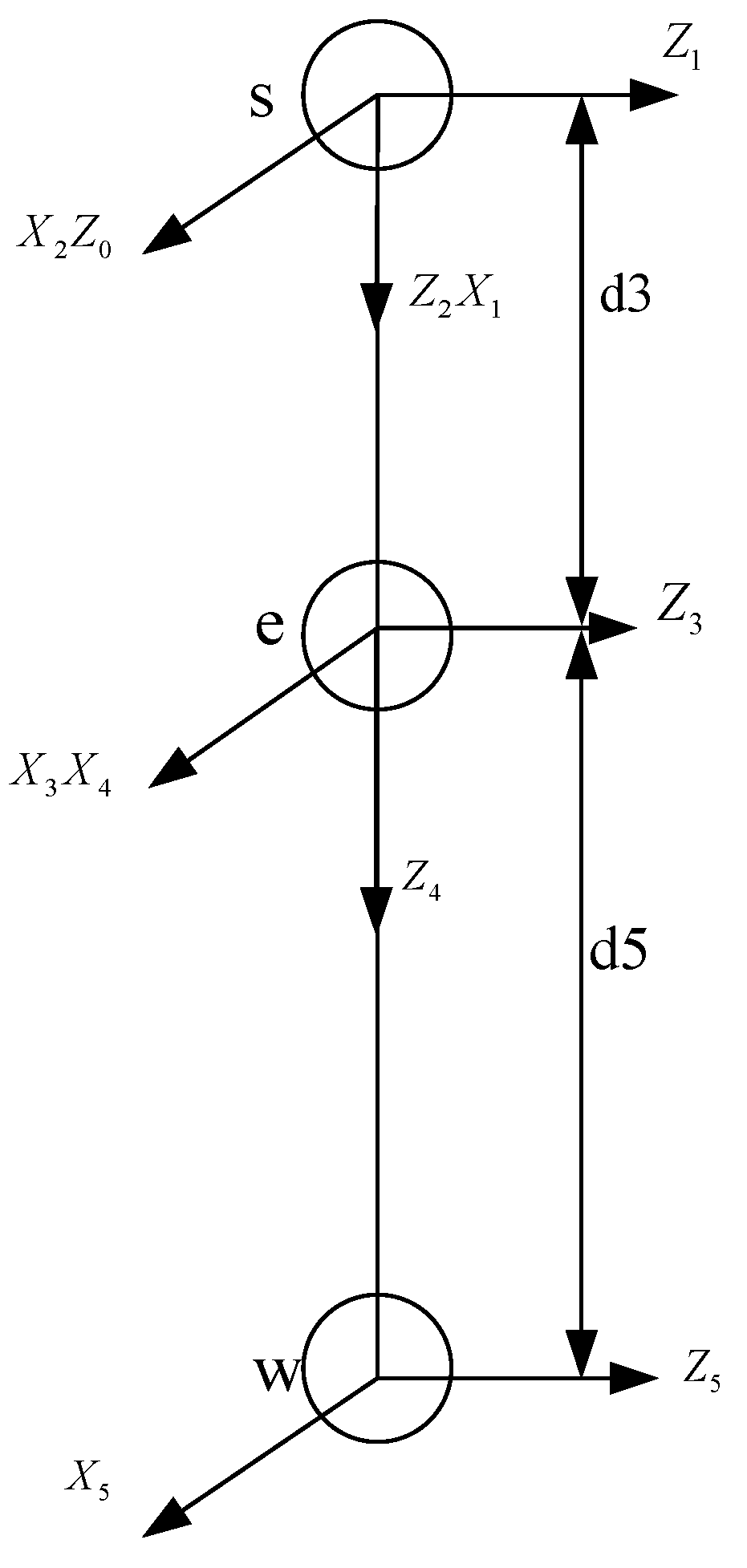
- Ding, Y.; Zhu, X.; Sun, X.; Meng, X.; Chen, X. Kinematics simulation and control system design of robot. Control. Eng. China 2021, 28, 546–552. [Google Scholar]
- Wang, Z.; Li, B.; Liu, R. Single-camera distance measurement algorithm based on YOLOv4 algorithm for unmanned aerial vehicle. Mach. Des. Manuf. Eng. 2022, 51, 58–62. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Links | (°) | /mm | /mm | (°) | Joint Range (°) |
|---|---|---|---|---|---|
| 1 | 0 | 0 | 90 | −119.5~119.5 | |
| 2 | (−90°) | 0 | 0 | −90 | −76~18 |
| 3 | d3 | 0 | 90 | −119.5~119.5 | |
| 4 | 0 | 0 | −90 | 2~88.5 | |
| 5 | (−90°) | d5 | 0 | 90 | 104.5~104.5 |
| 1 | 0 | 0 | 90 | −119.5~119.5 |
| Actual Position (cm) | Measured Position (cm) | Actual Position (cm) | Measured Position (cm) |
|---|---|---|---|
| 25 | 25.50 | 80 | 94.71 |
| 30 | 29.49 | 85 | 104.26 |
| 35 | 35.45 | 90 | 113.50 |
| 40 | 38.83 | 95 | 116.43 |
| 45 | 43.84 | 100 | 123.99 |
| 50 | 52.94 | 105 | 133.08 |
| 55 | 57.17 | 110 | 139.06 |
| 60 | 64.80 | 115 | 144.73 |
| 65 | 73.69 | 120 | 152.62 |
| 70 | 82.55 | 125 | 163.13 |
| 75 | 87.94 | 130 | 166.29 |
| Actual Position (cm) | Measured Position (cm) | Actual Position (cm) | Measured Position (cm) |
|---|---|---|---|
| 25 | 25.47 | 80 | 78.67 |
| 30 | 29.69 | 85 | 84.64 |
| 35 | 35.80 | 90 | 90.96 |
| 40 | 39.12 | 95 | 93.10 |
| 45 | 43.08 | 100 | 98.80 |
| 50 | 51.60 | 105 | 106.25 |
| 55 | 54.89 | 110 | 111.18 |
| 60 | 60.37 | 115 | 115.75 |
| 65 | 66.13 | 120 | 121.56 |
| 70 | 71.46 | 125 | 127.16 |
| 75 | 74.64 | 130 | 128.07 |
| Actual Distance (cm) | 0 | 20 | 40 |
|---|---|---|---|
| Index | |||
| 1 | 0.8 | 20.4 | 41.2 |
| 2 | 0.7 | 20.9 | 40.4 |
| 3 | 0.8 | 19.5 | 40.4 |
| 4 | 0.6 | 20.4 | 41.5 |
| 5 | 0.8 | 20.3 | 40.4 |
| 6 | 0.6 | 19.7 | 41.7 |
| 7 | 0.4 | 20.2 | 41.4 |
| 8 | 0.5 | 20.9 | 41.5 |
| 9 | 0.6 | 20.8 | 39.6 |
| 10 | 0.5 | 20.5 | 40.4 |
| 30 | 45 | 60 | |
|---|---|---|---|
| Index | |||
| 1 | 30.48 | 45.66 | 60.85 |
| 2 | 30.76 | 45.69 | 59.36 |
| 3 | 30.53 | 45.93 | 58.82 |
| 4 | 31.22 | 45.87 | 59.56 |
| 5 | 29.87 | 46.05 | 60.59 |
| 6 | 30.82 | 45.92 | 60.89 |
| 7 | 30.63 | 46.15 | 61.35 |
| 8 | 29.08 | 45.56 | 61.09 |
| 9 | 29.35 | 44.58 | 60.53 |
| 10 | 31.34 | 46.37 | 59.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Shi, Z.; Xu, X.; Wu, G.; Li, H.; Wen, S. Target Localization and Grasping of NAO Robot Based on YOLOv8 Network and Monocular Ranging. Electronics 2023, 12, 3981. https://doi.org/10.3390/electronics12183981
Jin Y, Shi Z, Xu X, Wu G, Li H, Wen S. Target Localization and Grasping of NAO Robot Based on YOLOv8 Network and Monocular Ranging. Electronics. 2023; 12(18):3981. https://doi.org/10.3390/electronics12183981
Chicago/Turabian StyleJin, Yingrui, Zhaoyuan Shi, Xinlong Xu, Guang Wu, Hengyi Li, and Shengjun Wen. 2023. "Target Localization and Grasping of NAO Robot Based on YOLOv8 Network and Monocular Ranging" Electronics 12, no. 18: 3981. https://doi.org/10.3390/electronics12183981
APA StyleJin, Y., Shi, Z., Xu, X., Wu, G., Li, H., & Wen, S. (2023). Target Localization and Grasping of NAO Robot Based on YOLOv8 Network and Monocular Ranging. Electronics, 12(18), 3981. https://doi.org/10.3390/electronics12183981