
Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics

Abstract
:1. Introduction
1.1. Related Work and Motivations
1.2. Contributions
1.3. Organization
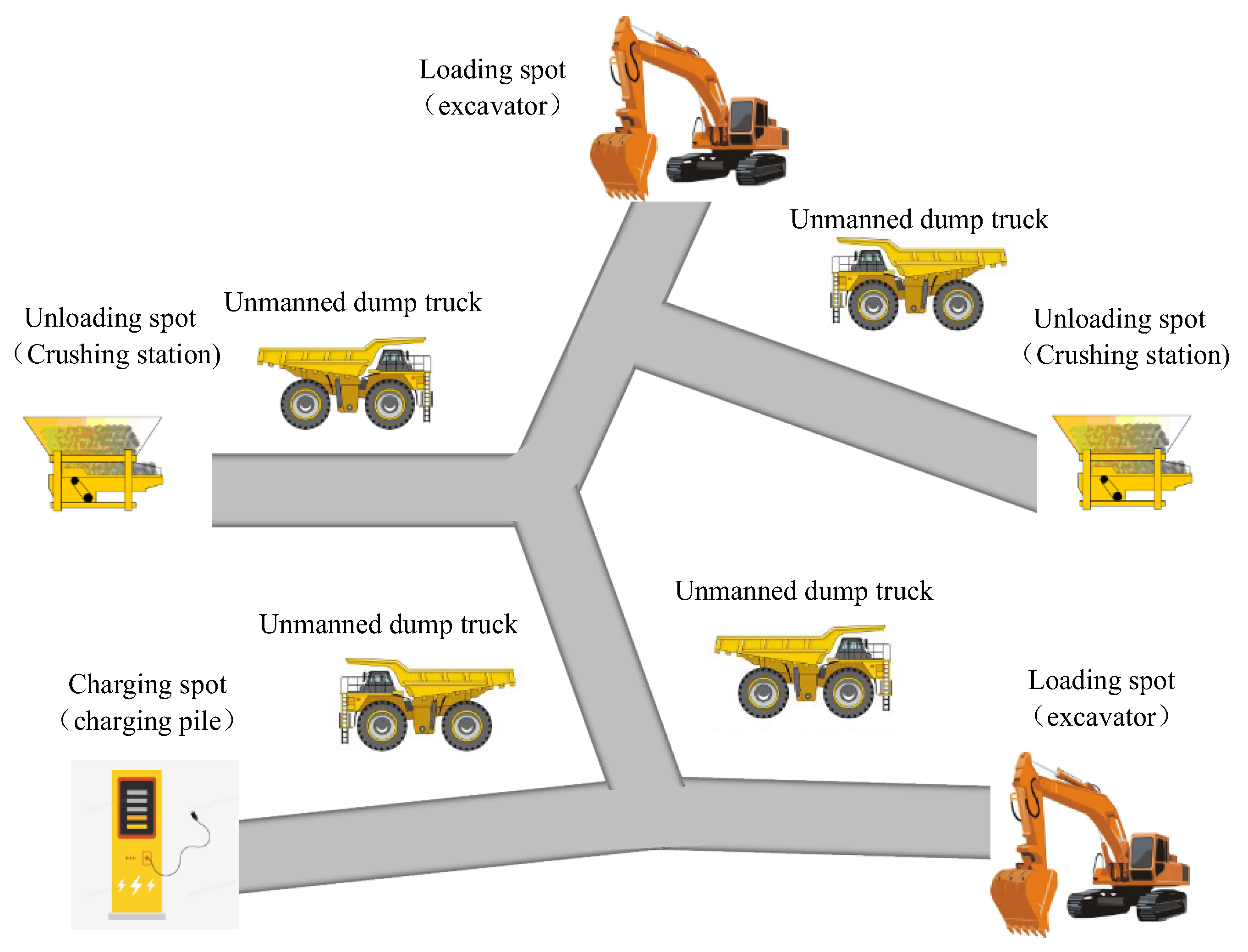
2. Problem Formulation
2.1. Cost Function Formulation
2.2. Transport Capability Composition
2.3. Energy Consumption Composition
2.4. Time Composition
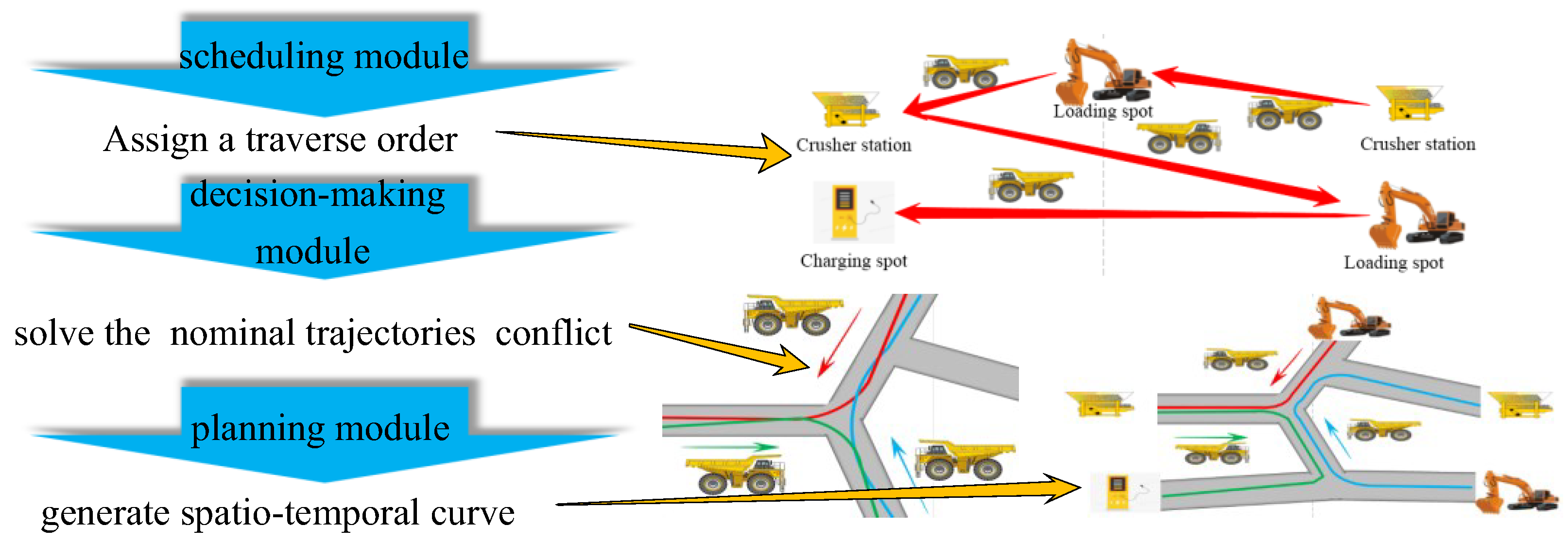
3. Methodology
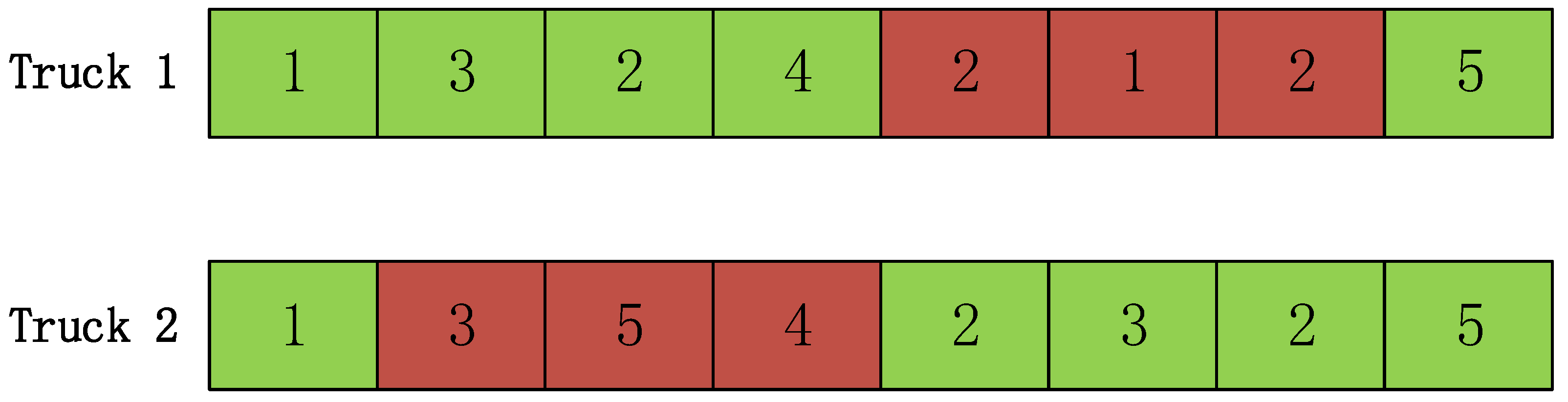
3.1. Principle of Solution Vector Encoding
3.2. Scheduling Problem Re-Formulation
3.3. Improved-Evolution Artificial Bee Colony Search Procedure
| Algorithm 1. IE-ABC. |
|
| Algorithm 2. ChargeConstruct |
| Input: ; Output: ; 1. Set ; 2. while do 3. ; 4. ; 5. if then 6. ; 7. ; 8. ; 9. ; 10. end if 11. end while 12. ; 13. return. |
4. Simulation Results and Discussion
4.1. Simulation Setup
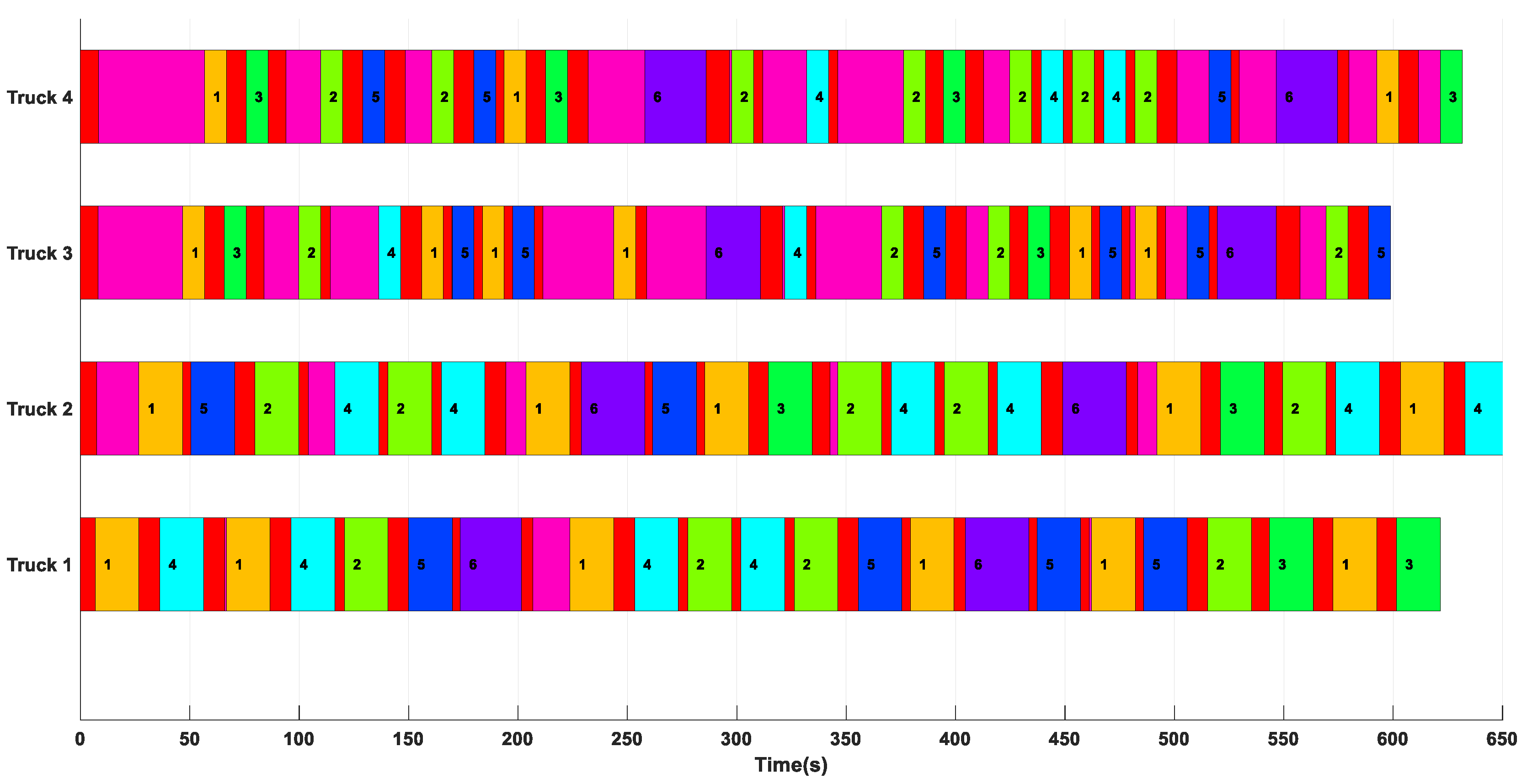
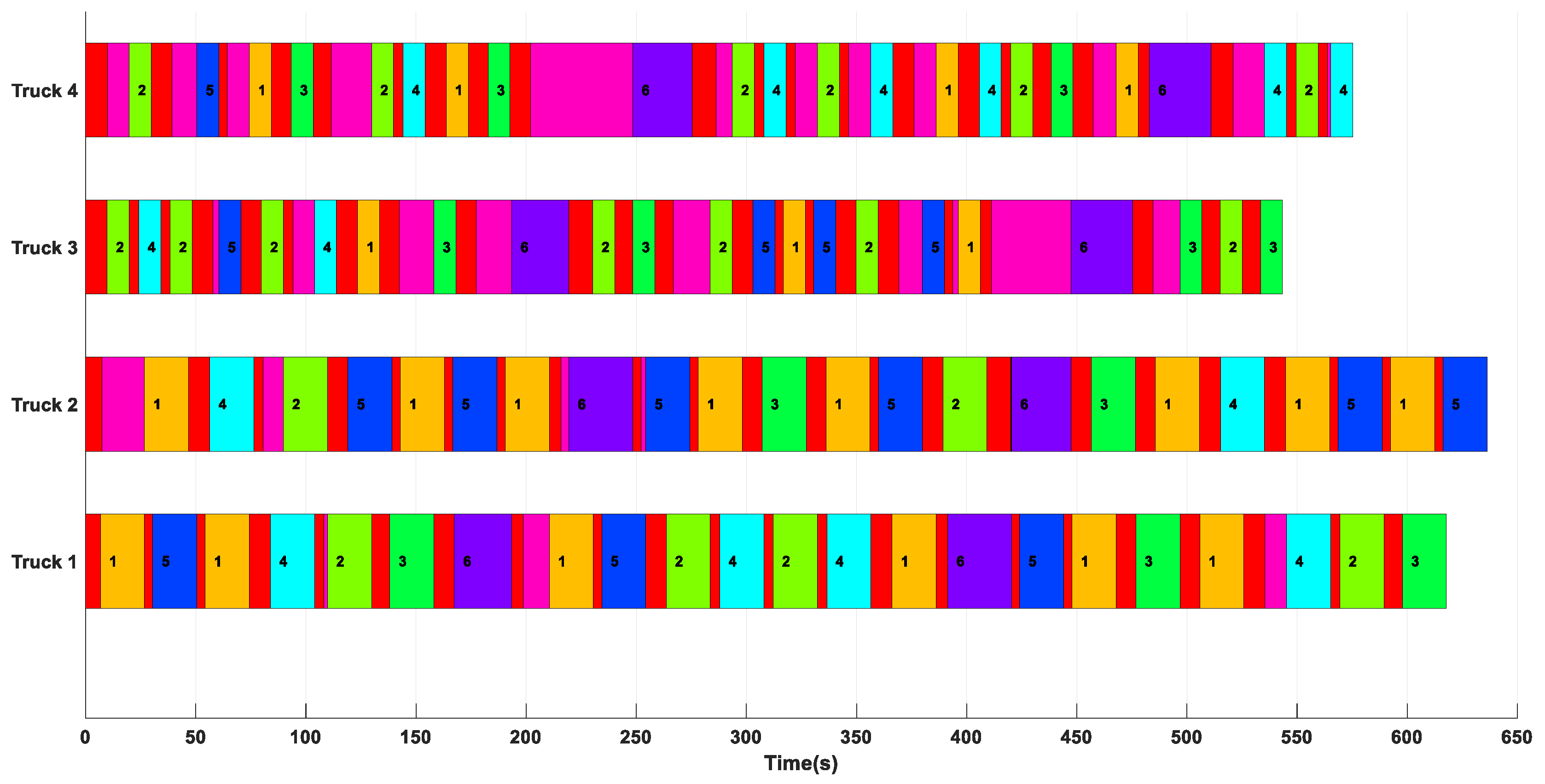
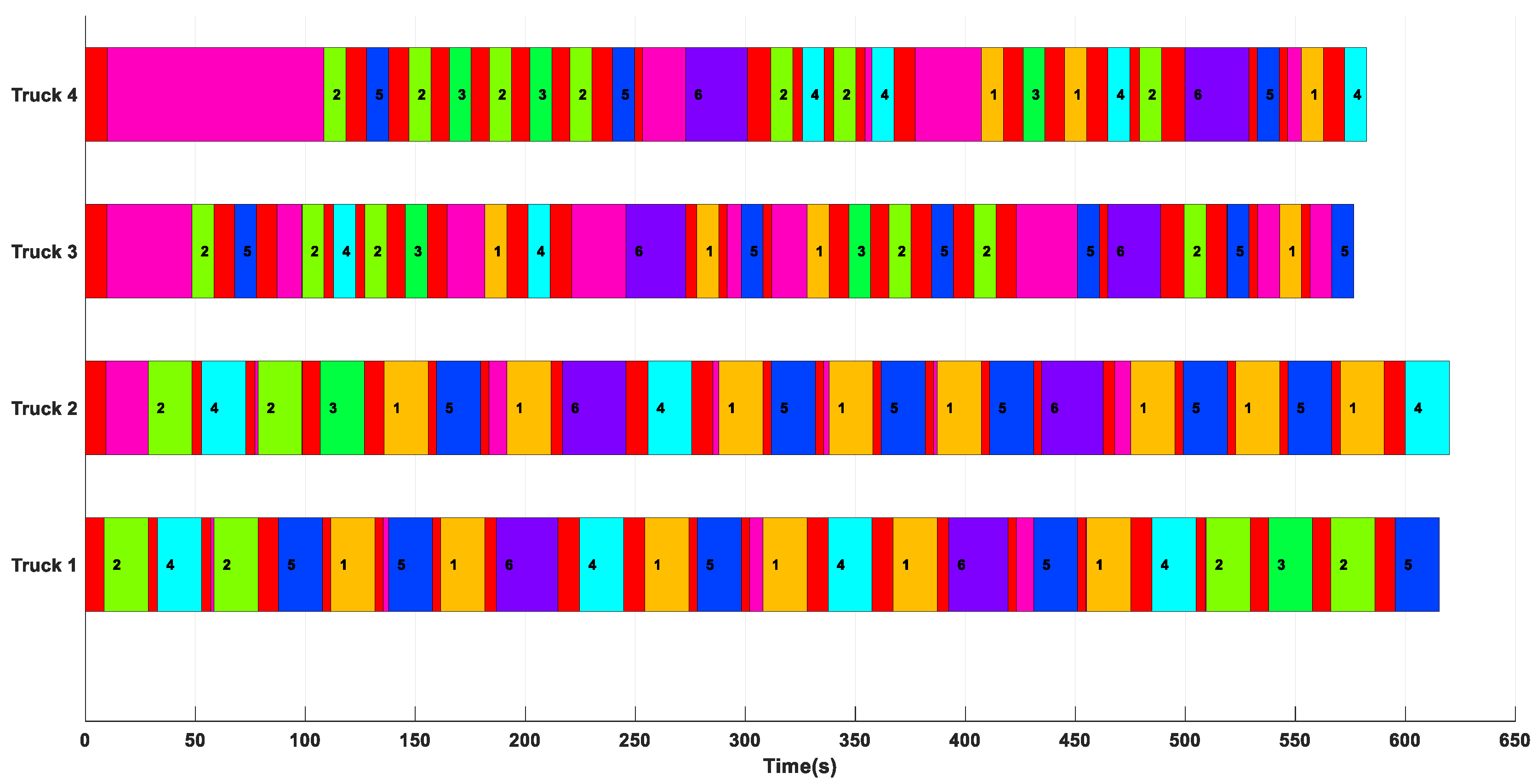
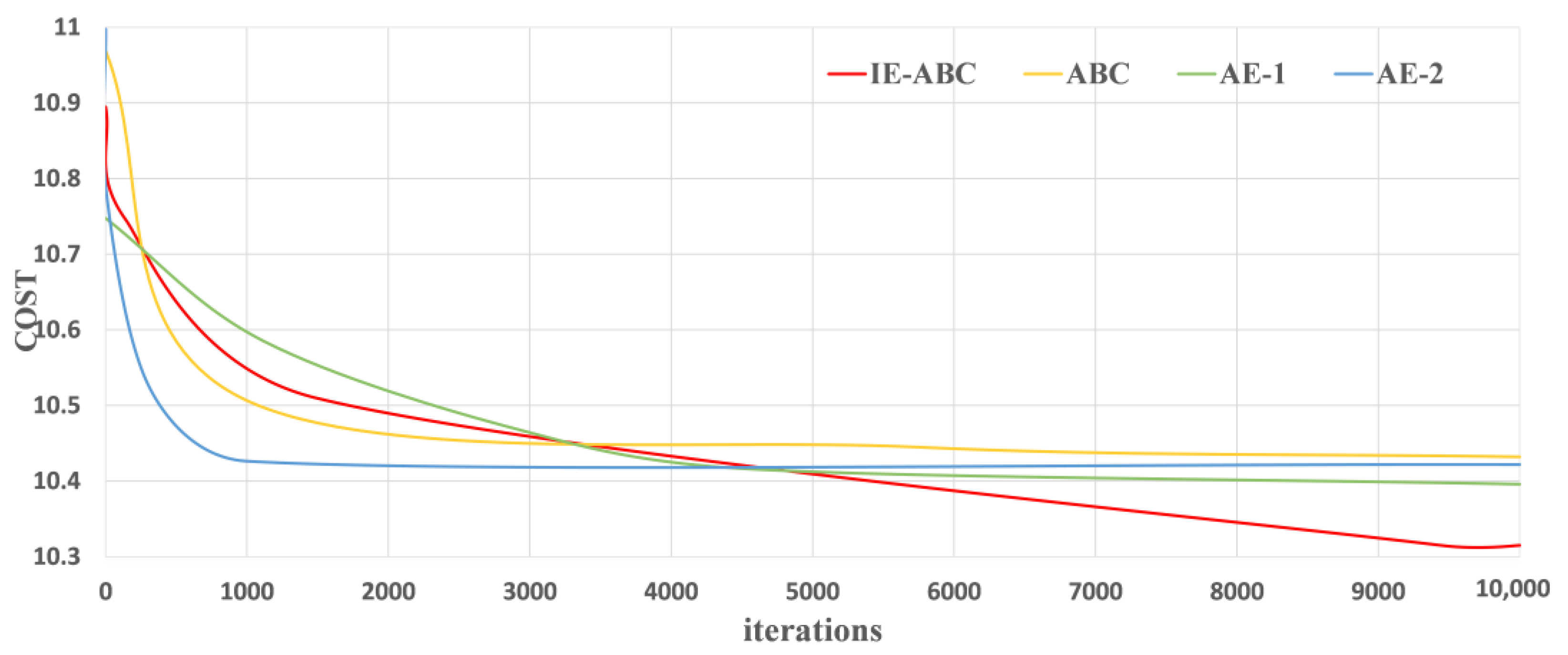
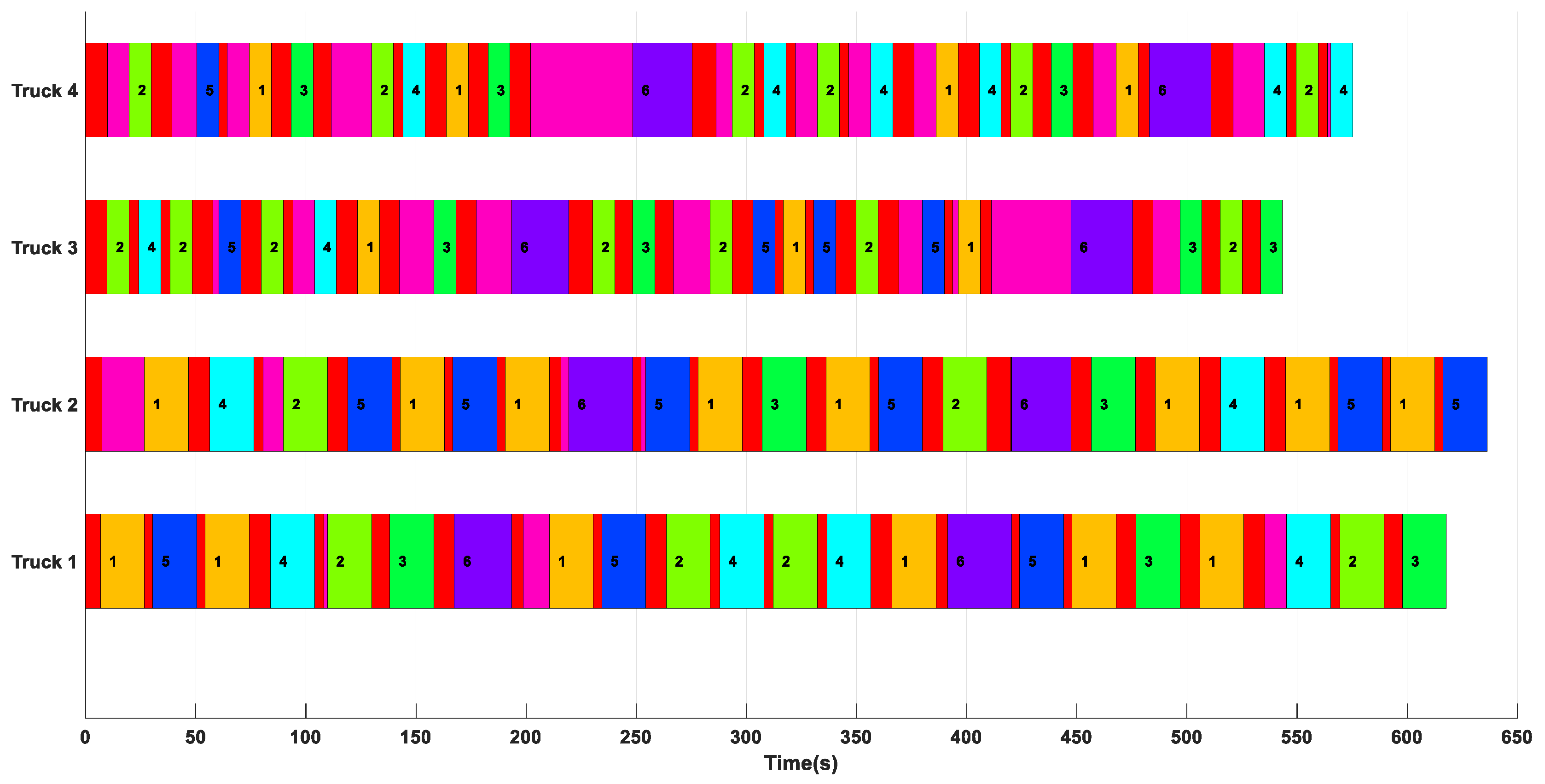
4.2. Simulation Results
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, J.; Zhao, B.; Yang, C.; Zhou, C.; Chen, S.; Ni, X.; Ai, Y. An Architecture and Key Technologies of Autonomous Truck Dispatching System in Open-pit Mines. In Proceedings of the 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), Nanjing, China, 18–21 November 2022; pp. 122–127. [Google Scholar]
- Zhang, B.; Li, D.; Ba, T.; Jiang, D.; Qiu, X.; Wang, T. Obstacle Detection and Tracking of Unmanned Mine Car Based on 3D Lidar. In Proceedings of the 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), Nanjing, China, 18–21 November 2022; pp. 222–228. [Google Scholar]
- Ma, Y.; Wang, Z.; Yang, H.; Yang, L. Artificial intelligence applications in the development of autonomous vehicles: A survey. IEEE/CAA J. Autom. Sin. 2020, 7, 315–329. [Google Scholar] [CrossRef]
- Chen, L.; Hu, X.; Wang, G.; Cao, D.; Li, L.; Wang, F.Y. Parallel Mining Operating Systems: From Digital Twins to Mining Intelligence. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July–15 August 2021; pp. 469–473. [Google Scholar]
- Moradi Afrapoli, A.; Askari-Nasab, H. Mining Fleet Management Systems: A Review of Models and Algorithms. Int. J. Min. Reclam. Environ. 2019, 33, 42–60. [Google Scholar] [CrossRef]
- Alarie, S.; Gamache, M. Overview of Solution Strategies Used in Truck Dispatching Systems for Open Pit Mines. Int. J. Surf. Min. Reclam. Environ. 2002, 16, 59–76. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Shao, Z.; Jia, N. Simultaneous Versus Joint Computing: A Case Study of Multi-vehicle Parking Motion Planning. J. Comput. Sci. 2017, 20, 30–40. [Google Scholar] [CrossRef]
- Ge, S.; Wang, F.Y.; Yang, J.; Ding, Z.; Wang, X.; Li, Y.; Teng, S.; Liu, Z.; Ai, Y.; Chen, L. Making standards for smart mining operations: Intelligent vehicles for autonomous mining transportation. IEEE Trans. Intell. Veh. 2022, 7, 413–416. [Google Scholar] [CrossRef]
- Gleixner, A. Solving Large-Scale Open Pit Mining Production Scheduling Problems by Integer Programming. Ph.D. Thesis, Zuse Institute Berlin (ZIB), Berlin, Germany, 2009. [Google Scholar]
- Li, B.; Yin, Z.; Ouyang, Y.; Zhang, Y.; Zhong, X.; Tang, S. Online Trajectory Replanning for Sudden Environmental Changes During Automated Parking: A Parallel Stitching Method. IEEE Trans. Intell. Veh. 2022, 7, 748–757. [Google Scholar] [CrossRef]
- Tian, F.; Zhou, R.; Li, Z.; Li, L.; Gao, Y.; Cao, D.; Chen, L. Trajectory Planning for Autonomous Mining Trucks Considering Terrain Constraints. IEEE Trans. Intell. Veh. 2021, 6, 772–786. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, X.; Cao, D.; Zhang, T.; Wang, Y. Mixed-integer and Conditional Trajectory Planning for an Autonomous Mining Truck in Loading/Dumping Scenarios: A Global Optimization Approach. IEEE Trans. Intell. Veh. 2022, 8, 1512–1522. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15729–15741. [Google Scholar] [CrossRef]
- Chen, L.; Xie, J.; Zhang, X.; Deng, J.; Ge, S.; Wang, F.Y. Mining 5.0: Concept and Framework for Intelligent Mining Systems in CPSS. IEEE Trans. Intell. Veh. 2023, 8, 3533–3536. [Google Scholar] [CrossRef]
- Patterson, S.R.; Kozan, E.; Hyland, P. Energy Efficient Scheduling of Open-pit Coal Mine Trucks. Eur. J. Oper. Res. 2017, 262, 759–770. [Google Scholar] [CrossRef]
- Zhang, L.; Shan, W.; Zhou, B.; Yu, B. A Dynamic Dispatching Problem for Autonomous Mine Trucks in Open-pit Mines Considering Endogenous Congestion. Transp. Res. Part C Emerg. Technol. 2023, 150, 104080. [Google Scholar] [CrossRef]
- Yuan, W.; Li, D.; Jiang, D.; Jia, Y.; Liu, Z.; Bian, W. Research on Real-Time Truck Dispatching Model in Open-pit Mine Based on Improved Genetic Algorithm. In Proceedings of the 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), Nanjing, China, 18–21 November 2022; pp. 234–239. [Google Scholar]
- Wang, Z.; Wang, J.; Zhao, M.; Guo, Q.; Zeng, X.; Xin, F.; Zhou, H. Truck Dispatching Optimization Model and Algorithm Based on 0-1 Decision Variables. Math. Probl. Eng. 2022, 2022, 5887672. [Google Scholar] [CrossRef]
- Bastos, G.S.; Souza, L.E.; Ramos, F.T.; Ribeiro, C.H. A Single-dependent Agent Approach for Stochastic Time-dependent Truck Dispatching in Open-pit Mining. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1057–1062. [Google Scholar]
- Zhang, X.; Chen, L.; Ai, Y.; Tian, B.; Cao, D.; Li, L. Scheduling of Autonomous Mining Trucks: Allocation Model Based Tabu Search Algorithm Development. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 982–989. [Google Scholar]
- Bao, H.; Zhang, R. Study on Optimization of Coal Truck Flow in Open-pit Mine. Adv. Civil Eng. 2020, 2020, 8848140. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, W.; Wang, C.; Fadzil, F.; Lauria, S.; Liu, X. A Novel Multi-Objective Optimization Approach with Flexible Operation Planning Strategy for Truck Scheduling. IJNDI 2023, 2, 100002. [Google Scholar] [CrossRef]
- Zhang, S.; Lu, C.; Jiang, S.; Shan, L.; Xiong, N.N. An Unmanned Intelligent Transportation Scheduling System for Open-Pit Mine Vehicles Based on 5G and Big Data. IEEE Access 2020, 8, 135524–135539. [Google Scholar] [CrossRef]
- Ahumada, G.I.; Herzog, O. Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines. ICAART 2021, 1, 160–170. [Google Scholar]
- Chang, Y.; Ren, H.; Wang, S. Modelling and Optimizing an Open-pit Truck Scheduling Problem. Discrete Dyn. Nat. Soc. 2015, 2015, 745378. [Google Scholar] [CrossRef]
- Afrapoli, A.M.; Tabesh, M.; Askari-Nasab, H. A Multiple Objective Transportation Problem Approach to Dynamic Truck Dispatching in Surface Mines. Eur. J. Oper. Res. 2019, 276, 331–342. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, A.; Ai, Y.; Tian, B.; Chen, L. Real-Time Scheduling of Autonomous Mining Trucks via Flow Allocation-Accelerated Tabu Search. IEEE Trans. Intell. Veh. 2022, 7, 466–479. [Google Scholar] [CrossRef]
- Smith, A.; Linderoth, J.; Luedtke, J. Optimization-based Dispatching Policies for Open-pit Mining. Optim. Eng. 2021, 22, 1347–1387. [Google Scholar] [CrossRef]
- Zeng, W.; Baafi, E.Y.; Fan, H. A Simulation Model to Study Truck-allocation Options. J. S. Afr. Inst. Min. Metall. 2022, 122, 741–750. [Google Scholar] [CrossRef] [PubMed]
- de Melo, W.B. Optimization of truck allocation in open pit mines using differential evolution algorithm. Int. J. Innov. Res. 2021, 9, 338–350. [Google Scholar] [CrossRef]
- Yeganejou, M.; Badiozamani, M.; Moradi-Afrapoli, A.; Askari-Nasab, H. Integration of Simulation and Dispatch Modelling to Predict Fleet Productivity: An Open-pit Mining Case. Min. Technol. 2022, 131, 67–79. [Google Scholar]
- Li, N.; Zhang, J.; Zhang, S.; Hou, X.; Liu, Y. The Influence of Accessory Energy Consumption on Evaluation Method of Braking Energy Recovery Contribution Rate. Energy Convers. Manag. 2018, 166, 545–555. [Google Scholar] [CrossRef]
- Liu, T.; Zou, Y.; Liu, D. Energy Management for Battery Electric Vehicle with Automated Mechanical Transmission. Int. J. Veh. Des. 2016, 70, 98–112. [Google Scholar] [CrossRef]
- Li, B.; Tang, S.; Zhang, Y.; Zhong, X. Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse. Electronics 2021, 10, 3093. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Setting |
|---|---|---|
| Number of unmanned dump trucks | 4 | |
| Number of tasks to be completed per unmanned dump truck | 20 | |
| Number of loading spot | 2 | |
| Number of unloading spot | 3 | |
| , , | Weight coefficient in Equation (1) | 100, 2.7 × 10−7, 0.01 |
| , | Weight coefficient in Equation (4) | 0.925, 430 |
| Weight coefficient in Equation (5) | 4000 | |
| The load capacity of unmanned dump truck i | 1 t, 2 t | |
| The average speed of unmanned dump truck i during cruising | 10 m/s, 15 m/s | |
| Loading time of unmanned dump truck i at loading spot | 10 s, 20 s | |
| Unloading time of unmanned dump truck i at unloading spot | 10 s, 20 s | |
| Full electric quantity of unmanned dump truck i | 0.25 kWh | |
| Charging efficiency | 3 × 104 J/s | |
| , | Weight coefficient in Equation (14) | 1, 0.0001 |
| Algorithm | Cost | Consumed Energy (J) | Time (s) |
|---|---|---|---|
| IE-ABC | 10.31 | 8.93 × 106 | 620.0 |
| ABC | 10.43 | 9.18 × 106 | 624.9 |
| Cost Function Definition Strategy | Cost | Consumed Energy (106 J) | Time (s) |
|---|---|---|---|
| Regarded-time Strategy | 10.31 | 8.93 | 620.0 |
| Disregarded-time Strategy | 10.63 | 9.00 | 652.9 |
| Encoding Strategy | Cost | Consumed Energy (106 J) | Time (s) |
|---|---|---|---|
| Proposed Encoding | 10.31 | 8.93 | 620.0 |
| Binary Encoding | 10.61 | 9.07 | 636.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Peng, X. Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics 2023, 12, 3793. https://doi.org/10.3390/electronics12183793
Fang Y, Peng X. Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics. 2023; 12(18):3793. https://doi.org/10.3390/electronics12183793
Chicago/Turabian StyleFang, Yong, and Xiaoyan Peng. 2023. "Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics" Electronics 12, no. 18: 3793. https://doi.org/10.3390/electronics12183793
APA StyleFang, Y., & Peng, X. (2023). Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics, 12(18), 3793. https://doi.org/10.3390/electronics12183793