
A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education

 ,
,  ,
, 
Abstract
1. Introduction
- Can the NAO robots be introduced in education? What is the comparison between the level of students before and after the introduction of robots in education?
- What is the status of the NAO robots in education articles published in the selected journals from 2014 to 2023? Is the number of articles for each year divided into two seasons concerning this topic, increasing, or decreasing?
- What research-sample groups are related to the selected articles from 2014 to 2023? What are the applications of Natural language programming? What are the advantages and disadvantages of NAO robots and NLP?
1.1. Natural Language Processing
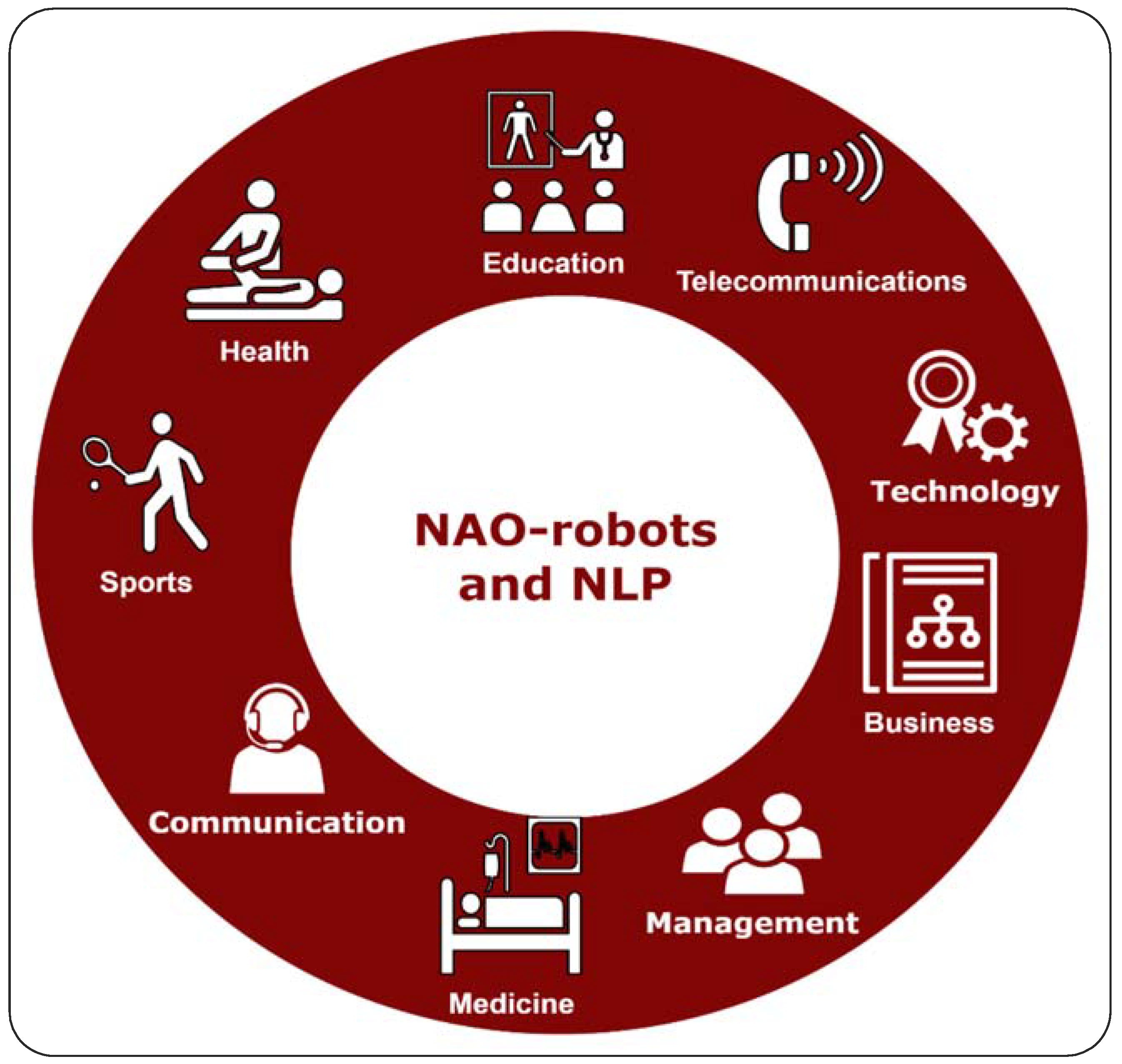
1.2. Natural Language Processing Applications
2. Materials and Methods
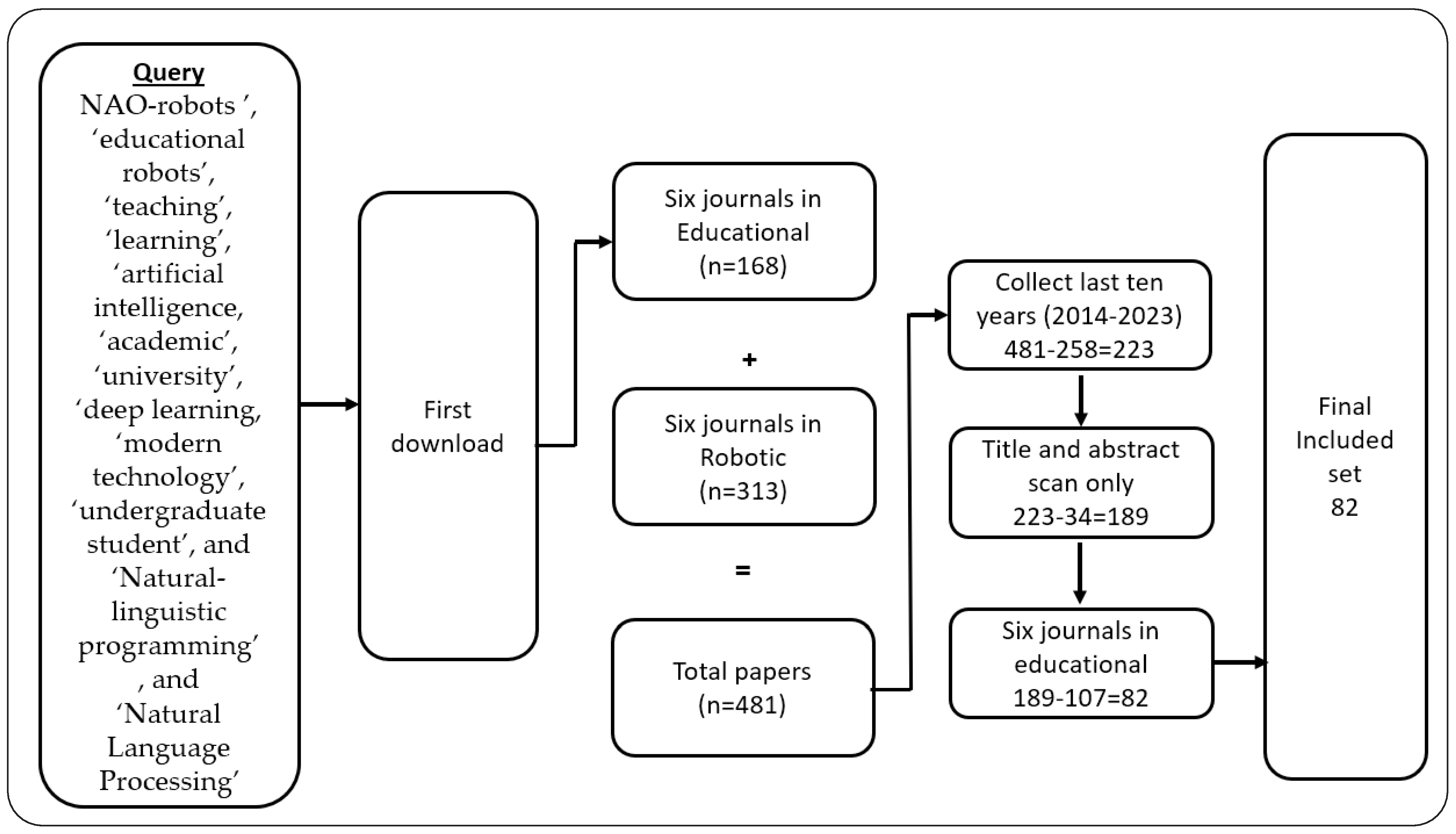
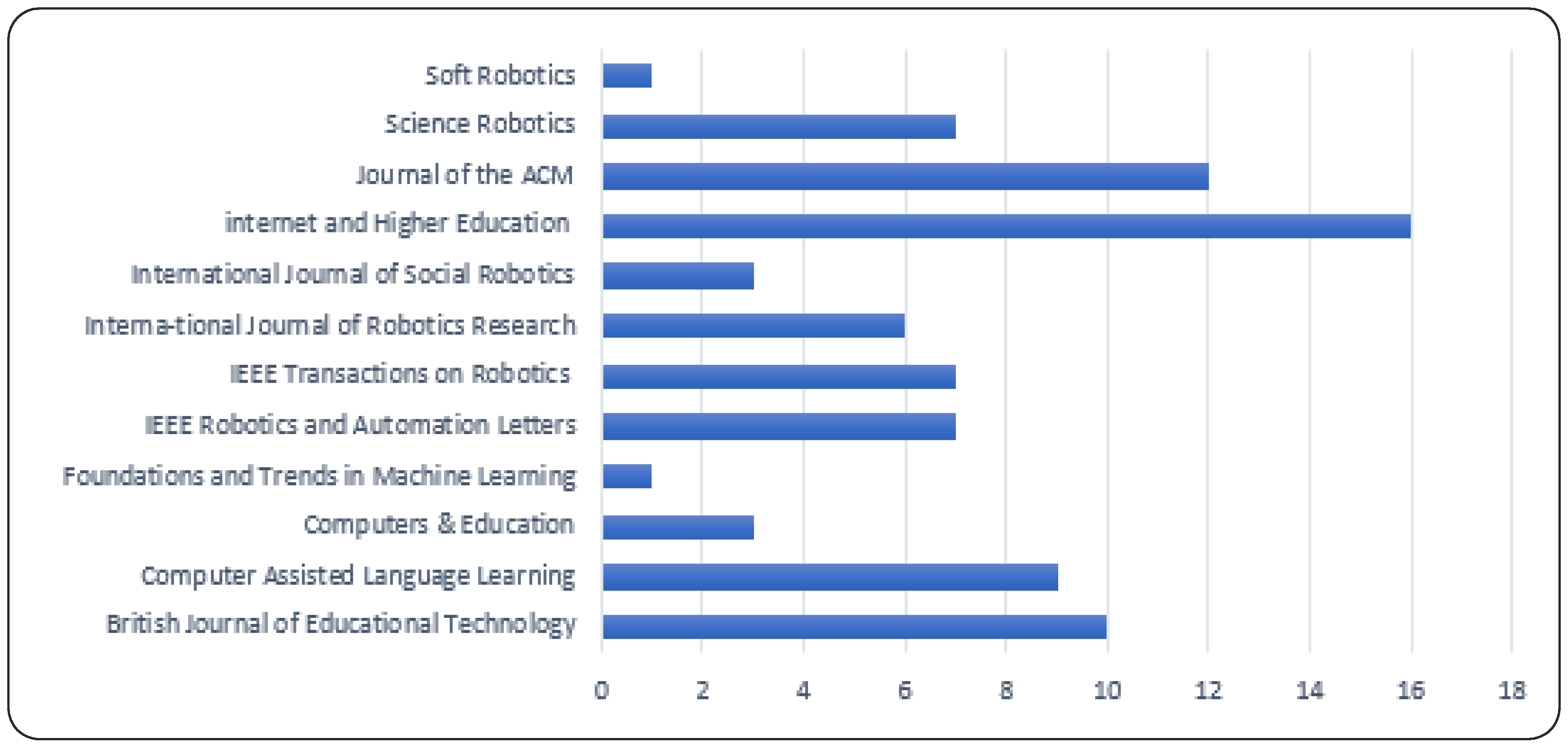
2.1. Benchmark Dataset
2.2. Study Criteria Applied
3. Results
3.1. Motivations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | References | Aim of Study | Model(s) | Dataset(s) | Study Field/Area | Limitation(s) |
|---|---|---|---|---|---|---|
| 1 | Dehghanzadeh et al. [61] | The goal to increase engagement, learning, and behavioral change; gamification aims to capitalize on people’s inherent desire to play and compete | Meta-Analysis | (9) dataset | (PRISMA) guideline |
|
| 2 | Yang et al. [62] | Childhood education: Effects on computational thinking, sequencing ability, and self-regulation | Matatalab coding | 101 kindergarteners | hypotheses |
|
| 3 | Zhang et al. [63] | Explore Chinese EFL learners’ acceptance of mobile dictionaries (MDs) and identify factors influencing their perceptions | Technology acceptance mode, mobile technology evaluation framework | 125 participants | NLP |
|
| 4 | Veivo et al. [64] | Children’s gaze behavior during dialogue breakdowns in robot-assisted language learning (RALL) is analyzed. Gaze patterns are identified through multimodal analysis of video recordings | IRE model | 18 videos, 36 primary school | Robot (RALL) |
|
| 5 | Engwall et al. [65] | Analyze robot behavior in RALL with adult learners and interaction | NA | 33 adults | Robot (RALL) |
|
| 6 | Hwang et al. [66] | Smart UEnglish app improves English as a foreign language (EFL) conversation with authentic context effectiveness | Smart UEnglish | English textbook | Robot + NLP |
|
| 7 | Cao et al. [67] | Compare ASD and TD children’s joint attention responses with an adult and social robot (NAO) | Comparative study design | 27 ASD + 40 TD children | Robot + Education |
|
| 8 | Ko et al. [68] | Create human–human interaction dataset for teaching social behaviors to robot | NA | AIR-Act2Act | Robot |
|
| 9 | Belpaeme et al. [69] | Explore social robots as tutors for second language learning. | Simulation | 40 adults | Robot + NLP |
|
| 10 | Engwall et al. [70] | Study Furhat robot’s interaction styles for language practice, assess learner satisfaction | Four interaction styles | 32 participants | Robot + NLP |
|
| 11 | Chew et al. [71] | Identify educational barriers to child rights in Malaysia, propose robot activists as an innovative solution. | Model design | Student | Robot + Education |
|
| 12 | Le et al. [72] | Explore telepresence robot acceptance in education, analyze factors influencing use intention, and provide design recommendations for improved usability. | Platform Qualtrics | 60 participants | Robot + Education |
|
| 13 | Engwal et al. [73] | Assess the feasibility of autonomous robot-led conversations for second language practice and evaluate speech recognition and utterance selection methods | Language model | 33 students | Robot |
|
| 14 | Esfandbd et al. [74] | Examine the effects of using RASA robot in speech therapy for children with language disorders. | CNN architectures | CK+ dataset | Robot + Education |
|
| 15 | Zhou et al. [75] | Assess online course quality and identify factors influencing implementation effectiveness. | NA | 100 courses | Education |
|
| 16 | Peng et al. [76] | Enhance student engagement in online collaborative writing by integrating intergroup and intragroup awareness information | Technology acceptance model (TAM) | 161 students | Education |
|
| 17 | Flanigan et al. [77] | Exploring online instructors’ rapport-building strategies and factors for initiating and maintaining rapport with students | Community of inquiry (CoI) | Nineteen college instructors | Education |
|
| 18 | Selwyn et al. [78] | Critique discriminatory learning analytics and explore alternatives aligned with diverse learners and learning experiences | Learning analytics | students | NLP |
|
| 19 | Belpaeme et al. [79] | Exploring social robots’ impact on education outcomes and challenges | Review | Several studies | Robot + Education |
|
| 20 | Ramirez et al. [80] | Compare active and passive SDOH screening methods in clinical spaces. | Retrospective cohort analysis | 1735 cases | NLP |
|
| 21 | Chang, et al. [81] | To enhance professional trainers’ effectiveness through a robot-based digital storytelling (DST) approach | BSFE model | 40 trainers | Robot |
|
| 22 | Velentza et al. [82] | To examine the performance of social robots as university professors in engineering education, measuring enjoyment, and knowledge acquisition, and to explore the correlation between enjoyment and knowledge acquisition through a series of experiments | Questionnaire | 138 people, 7 Males + 131 Females | Robot |
|
| 23 | Smakman et al. [83] | The aim of this study is to identify and compare the moral considerations associated with the introduction of social robots in primary education, to develop guidelines for their responsible implementation | Questionnaire | 118 | Robot + Education |
|
| 24 | Konijn et al. [47] | Investigate effects of robot behaviors on students’ learning outcomes in multiplication | NA | 86 students | Robot |
|
| 25 | Atapattu et al. [84] | Analyze and remove noise from lecture slides for structured data analysis. | Rating | 7 University lecturers | NLP |
|
| 26 | Liu et al. [85] | Exploring artificial intelligence (AI) chatbot as a book talk companion to enhance reading experience and maintain students’ interest and social connection | Artificial-intelligence techniques | 68 students | NLP |
|
| 27 | Rodrigues et al. [86] | Formative assessment system for students and teachers, automating exam creation, monitoring progress, and providing feedback on free-text answers. | Assessment | History teachers | NLP |
|
| 28 | Westera et al. [87] | Automated essay scoring methodology using NLP to reduce teacher workload. High precision achieves substantial workload reduction. | ReaderBench | 173 reports | NLP |
|
| 29 | Kyu et al. [88] | Exploring automatic methods for constructing an expert model from textual explanations, focusing on key concepts, and evaluating different metrics. | Design/technology integration in learning | 7 professors teaching and 6 major universities in the US | NLP |
|
| 30 | Rico-juan et al. [89] | Automated detection of inconsistencies in peer assessment using machine learning, aiming to reduce teachers’ workload and ensure a fair evaluation process. | In this paper, we consider ML algorithms for NLP | 354 students + 2 activities | NLP |
|
| 31 | Gerard et al. [90] | Automated, adaptive guidance: moving students forward with personalized assistance. | Knowledge integration (KI) + c-raterML | 798 6th and 7th-grade students | Education |
|
| 32 | Lee et al. [91] | Aim: Develop an AI-based chatbot to enhance preservice teachers’ responsive questioning skills in mathematics education. | Chatbot | Private dataset | Education |
|
| 33 | Lu et al. [92] | Analyze social media impact on mental health and well-being. | analysis of randomly selecting | 4 Course | Education |
|
| 34 | Wambsganss et al. [93] | Explore the impact of automated feedback and social comparison on students’ logical argumentation writing abilities. | Feedback mechanisms and novel NLP approaches | 71 students | NLP |
|
| 35 | Hsu et al. [94] | Investigate differences in learning achievement, AI anxiety, computational thinking (CT), and learning behaviors in CT and AI concept learning. | Voice assistant application (VA app) | 56 university first-year students | Education |
|
| 36 | Han et al. [95] | Investigate demographic factors influencing the unique experience of chatbot implementation for inclusive learning | FAQ chatbot | 46 students | Education |
|
| 37 | Sikström et al. [96] | Develop pedagogical agents with adaptive, adequate, relational, and logical communication for effective and usable learning support | Systematic review | Papers published (2010 and 2020), | Education |
|
| 38 | Zhu et al. [97] | Investigate student reactions to automated feedback and the relationship between revisions and improvement in scientific-argument writing | NA | 374 students | NLP |
|
| 39 | Bywater et al. [98] | Investigate the impact of the teacher responding tool (TRT) on high school teachers’ practice in effectively responding to students’ mathematical ideas | NA | 4 high school/teachers | Education |
|
| 40 | Greenhalgh et al. [99] | Analyze teacher-focused Twitter hashtags as distinct affinity spaces for learning | Descriptive and hierarchical analysis. | #michED1/9/2015 to 31/08/2016 | Education |
|
| 41 | Wang et al. [100] | Analyze students’ interactions with AI for English foreign language (EFL) learning and identify factors for success. | Cluster and epistemic network analysis | 16 students | Education |
|
| 42 | Yang et al. [101] | Investigate massive open online courses (MOOC) learners’ forum participation patterns and their impact on performance | Latent semantic analysis (LSA) model + decision tree model | 69,867 learners | Education |
|
3.2. Contributions
- Provide a guide for researchers, trainers, teachers, orientalists, and students;
- Promote policies and initiatives by universities and institutes to improve the research capacity of academic staff and students to join the NAO robot in the classroom and the laboratory;
- Cultivate a culture of learning, training, and teaching with NAO robots and make it essential in the field of education;
- Develop the skills of students and enhance their scientific level, cooperating to achieve the correct answer for any question.
4. Discussion
- Personalized instruction: robots provide tailored feedback, adaptive content delivery, and personalized tutoring;
- Collaborative learning: robots facilitate group discussions, fostering communication and critical thinking skills;
- Automated grading and feedback: NLP algorithms enable automated grading and timely feedback;
- Language learning support: NLP-driven robots aid language learners through conversations and explanations;
- Ethical considerations: privacy, fairness, and ethical implications must be addressed in implementation;
- Teacher–technology collaboration: educators play a vital role in guiding and contextualizing technology use;
- Preparation for future skills: robots and NLP prepare students for future workforce demands;
- Inclusive education: robots promote inclusivity by supporting diverse learners;
- Student engagement: robots increase student engagement and active participation in learning;
- Advancements and challenges: ongoing advancements and challenges shape the future of these applications.
4.1. Distribution of Publications over the Years of Publication
4.2. Distribution by the Author’s Nationality
4.3. Advantages
4.4. Disadvantages
5. Conclusions
- Transformational impact: robots and NLP have the potential to transform education;
- Personalized learning: individualized instruction enhances engagement and knowledge retention;
- Collaborative environment: robots foster communication, critical thinking, and teamwork skills;
- Efficiency and feedback: automated grading saves time and provides immediate feedback;
- Language learning enhancement: NLP-driven robots support language acquisition and accessibility;
- Ethical considerations: privacy, fairness, and transparency must be prioritized;
- Teacher empowerment: collaboration between educators and technology developers is crucial;
- Future readiness: integrating robots and NLP equips students with essential skills;
- Inclusivity and engagement: robots promote inclusive education and active student participation;
- Constant evolution: advancements and challenges continue to shape these applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NLP | Natural Language Processing |
| SJR | Scientific Journal Rankings |
| AI | Artificial Intelligence |
| Q1 | First Quarter |
| ACM | Association For Computing Machinery |
| IEEE | Institute of Electrical and Electronics Engineers |
| LA | Learning Analytics |
| ER | Educational Robotics |
| PP | Pedagogical Practices |
| UTAUT | A Unified Theory of Acceptance and The Use of Technology |
| HMA | Hot Melt Adhesives |
| SPARC | Supervised Increasingly Autonomous Robot Competencies |
| CRR | Care-Receiving Robot |
| HRI | Human–Robot Interaction |
| ANOVA | Analysis of Variance |
| MALL | Mobile Assisted Language Learning |
| BPE | Byte-Pair Encoding |
| KI | Knowledge Integration |
| CT | Computational Thinking |
| STEM | Technology, Engineering, And Mathematics |
| OJAD | Online Japanese Accent Dictionary |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| MDs | Mobile Dictionaries |
| RALL | Robot-Assisted Language Learning |
| EFL | English Foreign Language |
| DST | Digital Storytelling |
| RA | Reference Answer |
| KI | Knowledge Integration |
| ML | Machine Learning |
| TRT | Teacher Responding Tool |
| LSA | Latent Semantic Analysis |
| MOOC | Massive Open Online Courses |
Appendix A
Appendix B

References
- Bartneck, C. The end of the beginning: A reflection on the first five years of the HRI conference. Scientometr. J. 2011, 86, 487–504. [Google Scholar] [CrossRef] [PubMed]
- Métais, E. Enhancing information systems management with natural language processing techniques. Data Knowl. Eng. J. 2002, 41, 247–272. [Google Scholar] [CrossRef]
- Yang, Y.; Long, Y.; Sun, D.; Van Aalst, J.; Cheng, S. Fostering students’ creativity via educational robotics: An investigation of teachers’ pedagogical practices based on teacher interviews. Br. J. Educ. Technol. 2020, 51, 1826–1842. [Google Scholar] [CrossRef]
- Guggemos, J.; Seufert, S.; Sonderegger, S. Humanoid robots in higher education: Evaluating the acceptance of pepper in the context of an academic writing course using the UTAUT. Br. J. Educ. Technol. 2020, 51, 1864–1883. [Google Scholar] [CrossRef]
- Hobbs, R.; Tuzel, S. Teacher motivations for digital and media literacy: An examination of turkish educators. Br. J. Educ. Technol. 2017, 48, 7–22. [Google Scholar] [CrossRef]
- Yu, X.; Nurzaman, S.G.; Culha, U.; Iida, F. Soft Robotics Education. Soft Robot. 2014, 1, 202–212. [Google Scholar] [CrossRef]
- Senft, E.; Lemaignan, S.; Baxter, P.E.; Bartlett, M.; Belpaeme, T. Teaching robots social autonomy from in situ human guidance. Soft Robot. 2019, 4, eaat1186. [Google Scholar] [CrossRef]
- Younis, H.A.; Ruhaiyem, N.I.R.; Badr, A.A.; Abdul-Hassan, A.K.; Alfadli, I.M.; Binjumah, W.M.; Altuwaijri, E.A.; Nasser, M. Multimodal Age and Gender Estimation for Adaptive Human-Robot Interaction: A Systematic Literature Review. Processes 2023, 11, 1488. [Google Scholar] [CrossRef]
- Vollmer, A.L.; Read, R.; Trippas, D.; Belpaeme, T. Children conform, adults resist: A robot group induced peer pressure on normative social conformity. Sci. Robot. 2018, 3, eaat7111. [Google Scholar] [CrossRef]
- Michaelis, J.E.; Mutlu, B. Reading socially: Transforming the in-home reading experience with a learning-companion robot. Sci. Robot. 2018, 3, eaat5999. [Google Scholar] [CrossRef]
- Scassellati, B.; Boccanfuso, L.; Huang, C.; Mademtzi, M.; Qin, M.; Salomons, N.; Ventola, P.; Shic, F. Improving social skills in children with ASD using a long-term, in-home social robot. Sci. Robot. 2018, 3, eaat7544. [Google Scholar] [CrossRef]
- Yang, G.Z.; Bellingham, J.; Choset, H.; Dario, P.; Fischer, P.; Fukuda, T.; Jacobstein, N.; Nelson, B.; Veloso, M.; Berg, J. Science for robotics and robotics for science. Sci. Robot. 2016, 1, eaal2099. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, F.; Matsuzoe, S. Learning verbs by teaching a care-receiving robot by children: An experimental report. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 253–254. [Google Scholar]
- Tanaka, F.; Matsuzoe, S. Children teach a care-receiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. J. Hum.-Robot. Interact. 2012, 1, 78–95. [Google Scholar] [CrossRef]
- Majgaard, G.; Bertel, L.B. Initial phases of design-based research into the educational potentials of NAO-robots. In Proceedings of the HRI’14: ACM/IEEE International Conference on Human-Robot Interaction, Bielefeld, Germany, 3–6 March 2014; pp. 238–239. [Google Scholar]
- Diyas, Y.; Brakk, D.; Aimambetov, Y.; Sandygulova, A. Evaluating peer versus teacher robot within educational scenario of programming learning. In Proceedings of the IEEE 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 425–426. [Google Scholar]
- Sánchez, F.Á.B.; Correal, A.M.G.; Guerrero, E.G. Interactive drama with robots for teaching non-technical subjects. J. Hum.-Robot. Interact. 2017, 6, 48. [Google Scholar] [CrossRef]
- Reich-Stiebert, N.; Eyssel, F. (Ir)relevance of gender? on the influence of gender stereotypes on learning with a robot. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 166–176. [Google Scholar]
- Cheng, X.; Sun, J.; Zarifis, A. Artificial intelligence and deep learning in educational technology research and practice. Br. J. Educ. Technol. 2020, 51, 1653–1656. [Google Scholar] [CrossRef]
- Qin, F.; Li, K.; Yan, J. Understanding user trust in artificial intelligence-based educational systems: Evidence from China. Br. J. Educ. Technol. 2020, 51, 1693–1710. [Google Scholar] [CrossRef]
- Shum, S.J.B.; Luckin, R. Learning analytics and AI: Politics, pedagogy and practices. Br. J. Educ. Technol. 2019, 50, 2785–2793. [Google Scholar] [CrossRef]
- Ahmad, M.I.; Mubin, O.; Orlando, J. Understanding behaviours and roles for social and adaptive robots in education: Teacher’s perspective. In Proceedings of the Fourth International Conference on Human Agent Interaction, Biopolis, Singapore, 4–7 October 2016; pp. 297–304. [Google Scholar]
- Karayaneva, Y.; Hintea, D. Object recognition algorithms implemented on NAO robot for children’s visual learning enhancement. In Proceedings of the 2nd International Conference on Mechatronics Systems and Control, Amsterdam, The Netherlands, 21 February 2018; pp. 86–92. [Google Scholar]
- Gressmann, A.; Weilemann, E.; Meyer, D.; Bergande, B. Nao robot vs. lego mindstorms: The influence on the intrinsic motivation of computer science non-majors. In Proceedings of the 19th Koli Calling International Conference on Computing Education Research, Koli, Finland, 21–24 November 2019. [Google Scholar]
- Lee, A. Determining the effects of computer science education at the secondary level on STEM major choices in postsecondary institutions in the United States. Comput. Educ. 2015, 88, 241–255. [Google Scholar] [CrossRef]
- Roberts, T.H.; Brown, D.; Boulton, H.; Burton, A.; Shopland, N.; Martinovs, D. Examining the potential impact of digital game making in curricula based teaching: Initial observations. Comput. Educ. 2020, 158, 103988. [Google Scholar] [CrossRef]
- Mubin, O.; Alhashmi, M.; Baroud, R.; Alnajjar, F.S. Humanoid robots as teaching assistants in an arab school. In Proceedings of the 31st Australian Conference on Human-Computer-Interaction, Fremantle, WA, Australia, 2–5 December 2019; pp. 462–466. [Google Scholar]
- Ahmad, M.I.; Khordi-Moodi, M.; Lohan, K.S. Social robot for STEM education. In Proceedings of the ACM/IEEE International Conference on Human-Computer-Interaction, Cambridge, UK, 23–26 March 2020; pp. 90–92. [Google Scholar]
- Van Ewijk, G.; Smakma, M.; Konijn, E.A. Teachers’ perspectives on social robots in education: An exploratory case study. In Proceedings of the Interaction Design and Children Conference, London, UK, 21–24 June 2020; pp. 273–280. [Google Scholar]
- Hamid, S.; Waycott, J.; Kurnia, S.; Chang, S. Understanding students’ perceptions of the benefits of online social networking use for teaching and learning. Internet High. Educ. 2015, 26, 1–9. [Google Scholar] [CrossRef]
- So, S. Mobile instant messaging support for teaching and learning in higher education. Internet High. Educ. 2016, 31, 32–42. [Google Scholar] [CrossRef]
- Song, Y.; Siu, C.K. Affordances and constraints of BYOD (Bring Your Own Device) for learning and teaching in higher education: Teachers’ perspectives. Internet High. Educ. 2017, 32, 39–46. [Google Scholar] [CrossRef]
- Van den Heuvel, R.J.F.; Lexis, M.A.S.; de Witte, L.P. ZORA robot based interventions to achieve therapeutic and educational goals in children with severe physical disabilities. Int. J. Soc. Robot. 2020, 12, 493–504. [Google Scholar] [CrossRef]
- Zaraki, A.; Khamassi, M.; Wood, L.J.; Lakatos, G.; Tzafestas, C.; Amirabdollahian, F.; Robins, B.; Dautenhahn, K. A novel reinforcement-based paradigm for children to teach the humanoid kaspar robot. Int. J. Soc. Robot. 2020, 12, 709–720. [Google Scholar] [CrossRef]
- Yoshino, K.; Zhang, S. Construction of teaching assistant robot in programming class. In Proceedings of the 7th International Congress on Advanced Applied Informatics (IIAI-AAI), Yonago, Japan, 8–13 July 2018; pp. 215–220. [Google Scholar]
- Vrochidou, E.; Najoua, A.; Lytridis, C.; Salonidis, M.; Ferelis, V.; Papakostas, G.A. Social robot NAO as a self-regulating didactic mediator: A case study of teaching/learning numeracy. In Proceedings of the 2018 26th International Conference on Software, Telecommunications and Computer Networks, SoftCOM, Split, Croatia, 13–15 September 2018; pp. 93–98. [Google Scholar]
- Shirouzu, H.; Miyake, N. Effects of robots’ revoicing on preparation for future learning. In Proceedings of the 10th International Conference on Computer-Supported Collaborative Learning, Madison, WI, USA, 15–19 June 2013; Volume 1, pp. 438–445. [Google Scholar]
- Mubin, O.; Stevens, C.J.; Shahid, S.; Al Mahmud, A.; Dong, J. A review of the applicability of robots in education. Technol. Educ. Learn. 2013, 1, 13. [Google Scholar] [CrossRef]
- Koizumi, S.; Kanda, T.; Miyashita, T. Collaborative learning experiment with social robot. J. Robot. Soc. Jpn. 2011, 29, 902–906. [Google Scholar] [CrossRef]
- Sun, Z.; Li, Z.; Nishimorii, T. Development and assessment of robot teaching assistant in facilitating learning. In Proceedings of the International Conference of Educational Innovation through Technology (EITT), Osaka, Japan, 7–9 December 2018; pp. 165–169. [Google Scholar]
- Tanaka, F.; Takahashi, T.; Matsuzoe, S.; Tazawa, N.; Morita, M. Telepresence robot helps children in communicating with teachers who speak a different language. In Proceedings of the 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Bielefeld, Germany, 3–6 March 2014; pp. 399–406. [Google Scholar]
- Magyar, G.; Cádrik, T.; Virčiková, M.; Sinčák, P. Towards adaptive cloud-based platform for robotic assistants in education. In Proceedings of the 2014 IEEE 12th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 23–25 January 2014; pp. 285–289. [Google Scholar]
- Eteokleous, N.; Ktoridou, D. Educational robotics as learning tools within the teaching and learning practice. In Proceedings of the 2014 IEEE Global Engineering Education Conference (EDUCON), Istanbul, Turkey, 3–5 April 2014; pp. 1055–1058. [Google Scholar]
- Montalvo, M.; Calle-Ortiz, E. Programming by demonstration for the teaching and preservation of intangible cultural heritage. In Proceedings of the 2017 IEEE XXIV International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Cusco, Peru, 15–18 August 2017; Volume 2. [Google Scholar]
- Johal, W.; Jacq, A.; Paiva, A.; Dillenbourg, P. Child-robot spatial arrangement in a learning by teaching activity. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 533–538. [Google Scholar]
- Tosello, E.; Michieletto, S.; Pagello, E. Training master students to program both virtual and real autonomous robots in a teaching laborator students to program both virtual and real autonomous robots in a teaching laboratory. In Proceedings of the IEEE Global Engineering Education Conference (EDUCON), Abu Dhabi, United Arab Emirates, 10–13 April 2016; pp. 621–630. [Google Scholar]
- Konijn, E.A.; Hoorn, J.F. Robot tutor and pupils’ educational ability: Teaching the times tables. Comput. Educ. 2020, 157, 103970. [Google Scholar] [CrossRef]
- Xia, L.; Zhong, B. A systematic review on teaching and learning robotics content knowledge in K-12. Comput. Educ. 2018, 127, 267–282. [Google Scholar] [CrossRef]
- Younis, H.A.; Jamaludin, R.; Wahab, M.N.A.; Mohamed, A.S.A. The review of NAO robotics in educational 2014-2020 in COVID-19 Virus (pandemic ara): Technologies, type of application, advantage, disadvantage and motivation. IOP Conf. Ser. Mater. Sci. Eng. 2020, 928, 032014. [Google Scholar] [CrossRef]
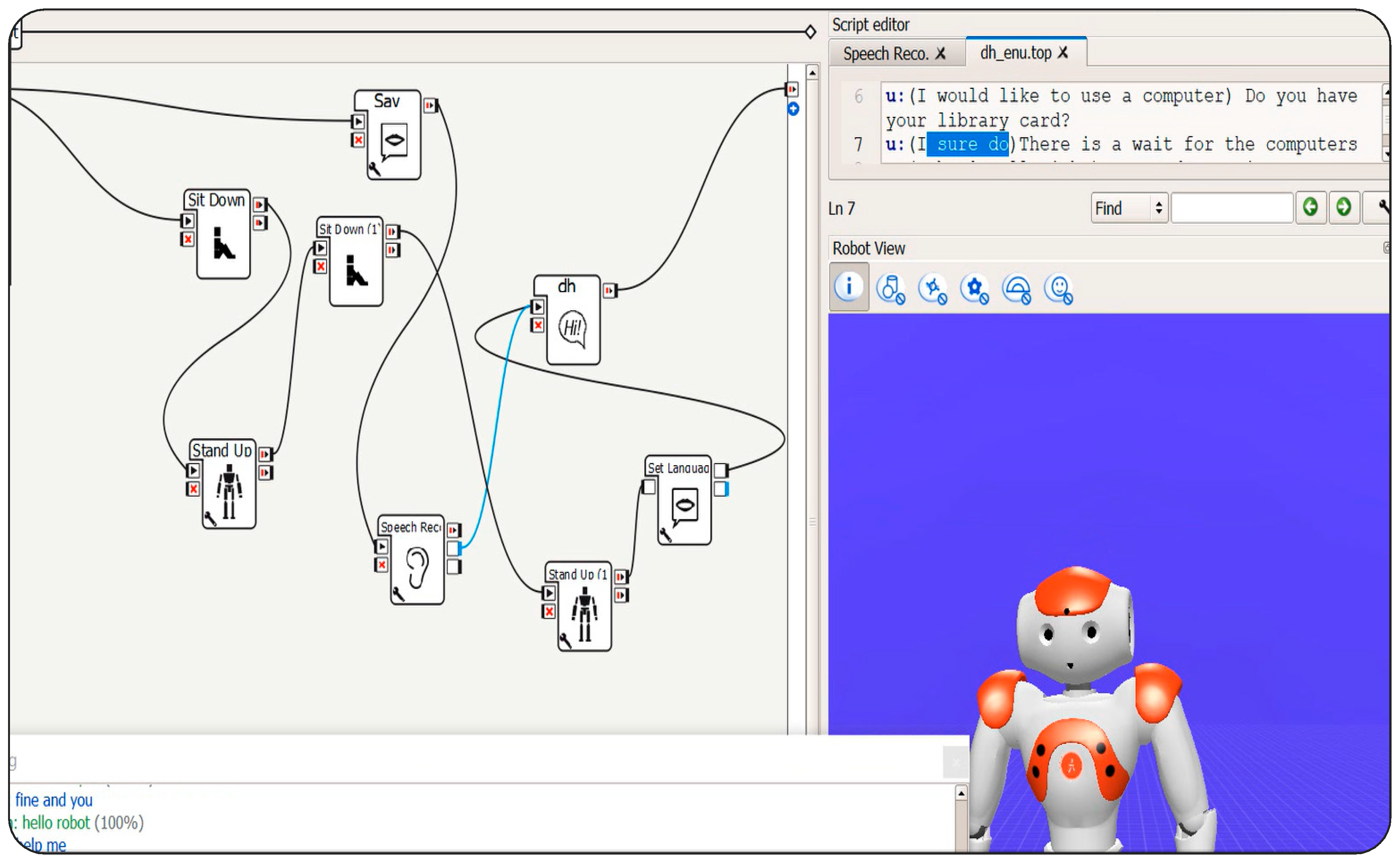
- Younis, H.A.; Mohamed, A.S.A.; Wahab, M.N.A.; Jamaludin, R.; Salisu, S. A New speech recognition model in a human-robot interaction scenario using NAO robot. In Proceedings of the International Conference on Communication & Information Technology (ICICT), Basrah, Iraq, 5–6 June 2021; pp. 215–220. [Google Scholar]
- Li, D.; Chen, X. Study on the application and challenges of educational robots in future education. In Proceedings of the 2020 International Conference on Artificial Intelligence and Education (ICAIE), Tianjin, China, 26–28 June 2020; pp. 198–201. [Google Scholar]
- Tan, J.T.C.; Iocchi, L.; Eguchi, A.; Okada, H. Bridging robotics education between high school and university: RoboCup@Home education. In Proceedings of the 2019 IEEE AFRICON, Accra, Ghana, 25–27 September 2019; pp. 1–4. [Google Scholar]
- Haerazi, H.; Utama, I.M.P.; Hidayatullah, H. Mobile applications to improve english writing skills viewed from critical thinking ability for pre-service teachers. Int. J. Interact. Mob. Technol. 2020, 14, 58–72. [Google Scholar] [CrossRef]
- Mukhitdinova, K.; Asilova, G.; Salisheva, Z.; Rakhmatullaeva, M. Current issues of creating educational material for intensive teaching to the Uzbek language of foreigners. Int. J. Eng. Adv. Technol. 2019, 9, 5224–5226. [Google Scholar] [CrossRef]
- Marello, C.; Marchisio, M.; Pulvirenti, M.; Fissore, C. Automatic assessment to enhance online dictionaries consultation skills. In Proceedings of the 16th International Conference on Cognition and Exploratory Learning in the Digital Age (Celda 2019), Cagliari, Italy, 7–9 November 2019; pp. 331–338. [Google Scholar]
- Minematsu, N.; Nakamura, I.; Suzuki, M.; Hirano, H.; Nakagawa, C.; Nakamura, N.; Tagawa, Y.; Hirose, K.; Hashimoto, H. Development and evaluation of online infrastructure to aid teaching and learning of Japanese prosody. IEICE Trans. Inf. Syst. 2017, 100, 662–669. [Google Scholar] [CrossRef]
- Dmitrichenkova, S.V.; Chauzova, V.A.; Malykh, E.A. Foreign language training of IT-students with the programme—translator in the directions and specialties of engineering faculty. Procedia Comput. Sci. 2017, 103, 577–580. [Google Scholar] [CrossRef]
- Balalaieva, O. Online resources and software for teaching and learning latin recursos online e software para ensinar e aprender latim. Texto Livre 2019, 12, 93–188. [Google Scholar] [CrossRef]
- Ngo, X.V.; Le Ha, T.; Nguyen, P.T.; Nguyen, L.M. Combining advanced methods in japanese-vietnamese neural machine translation. In Proceedings of the 10th International Conference on Knowledge and Systems Engineering (KSE), Ho Chi Minh, Vietnam, 1–3 November 2018; pp. 318–322. [Google Scholar]
- Younis, H.A.; Mohamed, A.S.A.; Jamaludin, R.; Wahab, M.N.A. Survey of robotics in education, taxonomy, applications, and platforms during COVID-19. Comput. Mater. Contin. J. 2021, 67, 687–707. [Google Scholar]
- Dehghanzadeh, H.; Farrokhnia, M. Using Gamification to Support Learning in K-12 Education: A Systematic Literature Review. Br. J. Educ. Technol. 2023, 1–37. [Google Scholar] [CrossRef]
- Yang, W.; Tsz, D.; Ng, K.; Gao, H. Robot Programming versus Block Play in Early Childhood Education: Effects on Computational Thinking, Sequencing Ability, and Self-Regulation. Br. J. Educ. Technol. 2022, 53, 1817–1841. [Google Scholar] [CrossRef]
- Zhang, D.; Hennessy, S.; Pérez-paredes, P. An Investigation of Chinese EFL Learners’ Acceptance of Mobile Dictionaries in English Language Learning An Investigation of Chinese EFL Learners’ Acceptance of Mobile Dictionaries in English. Comput. Assist. Lang. Learn. 2023, 1–25. [Google Scholar] [CrossRef]
- Veivo, O.; Mutta, M. Dialogue Breakdowns in Robot-Assisted L2 Learning. Comput. Assist. Lang. Learn. 2022, 1–22. [Google Scholar] [CrossRef]
- Engwall, O.; Lopes, J. Interaction and Collaboration in Robot-Assisted Language Learning for Adults. Comput. Assist. Lang. Learn. 2022, 35, 1273–1309. [Google Scholar] [CrossRef]
- Hwang, W.; Guo, B.; Hoang, A.; Chang, C. Facilitating Authentic Contextual EFL Speaking and Conversation with Smart Mechanisms and Investigating Its Influence on Learning Achievements. Comput. Assist. Lang. Learn. 2022, 1–27. [Google Scholar] [CrossRef]
- Cao, H.; Simut, R.E.; Desmet, N.; de Beir, A.; Van De Perre, G.; Vanderborght, B.; Member, S. Robot-Assisted Joint Attention: A Comparative Study between Children with Autism Spectrum Disorder and Typically Developing Children in Interaction with NAO. IEEE Access 2020, 8, 223325–223334. [Google Scholar] [CrossRef]
- Ko, W.; Jang, M.; Lee, J.; Kim, J. AIR-Act2Act: Human—Human Interaction Dataset for Teaching Non-Verbal Social Behaviors to Robots. Int. J. Robot. Res. 2021, 40, 691–697. [Google Scholar] [CrossRef]
- Belpaeme, T.; Vogt, P.; Van Den Berghe, R.; Bergmann, K.; Göksun, T.; De Haas, M.; Kanero, J.; Kennedy, J.; Küntay, A.C.; Papadopoulos, F.; et al. Guidelines for Designing Social Robots as Second Language Tutors. Int. J. Soc. Robot. 2018, 10, 325–341. [Google Scholar] [CrossRef]
- Engwall, O.; Lopes, J.; Åhlund, A. Robot Interaction Styles for Conversation Practice in Second Language Learning. Int. J. Soc. Robot. 2021, 13, 251–276. [Google Scholar] [CrossRef]
- Chew, E.; Sikander, U.; Pei, K.; Lee, H. Designing a Novel Robot Activist Model for Interactive Child Rights Education. Int. J. Soc. Robot. 2021, 13, 1641–1655. [Google Scholar] [CrossRef]
- Lei, M.; Clemente, I.M.; Liu, H.; Bell, J. The Acceptance of Telepresence Robots in Higher Education. Int. J. Soc. Robot. 2022, 14, 1025–1042. [Google Scholar] [CrossRef]
- Engwall, O.; Lopes, J.; Cumbal, R. Is a Wizard-of-Oz Required for Robot-Led Conversation Practice in a Second Language? Int. J. Soc. Robot. 2022, 14, 1067–1085. [Google Scholar] [CrossRef]
- Esfandbod, A.; Rokhi, Z.; Meghdari, A.F. Utilizing an Emotional Robot Capable of Lip-Syncing in Robot-Assisted Speech Therapy Sessions for Children with Language Disorders. Int. J. Soc. Robot. 2023, 15, 165–183. [Google Scholar] [CrossRef]
- Zhou, X.; Li, Q.; Xu, D.; Li, X.; Fischer, C. College Online Courses Have Strong Design in Scaffolding but Vary Widely in Supporting Student Agency and Interactivity. Internet High. Educ. 2023, 58, 100912. [Google Scholar] [CrossRef]
- Peng, Y.; Li, Y.; Su, Y.; Chen, K.; Jiang, S. Effects of Group Awareness Tools on Students’ Engagement, Performance, and Perceptions in Online Collaborative Writing: Intergroup Information Matters. Internet High. Educ. 2022, 53, 100845. [Google Scholar] [CrossRef]
- Flanigan, A.E.; Akcaoglu, M.; Ray, E. Initiating and Maintaining Student-Instructor Rapport in Online Classes. Internet High. Educ. 2022, 53, 100844. [Google Scholar] [CrossRef]
- Selwyn, N. Re-Imagining ‘Learning Analytics’ … a Case for Starting Again? Internet High. Educ. 2020, 46, 100745. [Google Scholar] [CrossRef]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social Robots for Education: A Review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef]
- De Ramirez, S.S.; Shallat, J.; Mcclure, K.; Foulger, R.; Barenblat, L. Screening for Social Determinants of Health: Active and Passive Information Retrieval Methods. Popul. Health Manag. 2022, 25, 781–788. [Google Scholar] [CrossRef]
- Chang, C.; Hwang, G.; Chen, K. Fostering Professional Trainers with Robot-Based Digital Storytelling: A Brainstorming, Selection, Forming and Evaluation Model for Training Guidance. Comput. Educ. 2023, 202, 104834. [Google Scholar] [CrossRef]
- Velentza, A.; Fachantidis, N.; Lefkos, I. Learn with Surprize from a Robot Professor. Comput. Educ. 2021, 173, 104272. [Google Scholar] [CrossRef]
- Smakman, M.; Vogt, P.; Konijn, E.A. Moral Considerations on Social Robots in Education: A Multi-Stakeholder Perspective. Comput. Educ. 2021, 174, 104317. [Google Scholar] [CrossRef]
- Atapattu, T.; Falkner, K.; Falkner, N. A Comprehensive Text Analysis of Lecture Slides to Generate Concept Maps. Comput. Educ. 2017, 115, 96–113. [Google Scholar] [CrossRef]
- Liu, C.; Liao, M.; Chang, C.; Lin, H. An Analysis of Children’ Interaction with an AI Chatbot and Its Impact on Their Interest in Reading. Comput. Educ. 2022, 189, 104576. [Google Scholar] [CrossRef]
- Rodrigues, F.; Oliveira, P. A System for Formative Assessment and Monitoring of Students’ Progress. Comput. Educ. 2014, 76, 30–41. [Google Scholar] [CrossRef]
- Westera, W.; Dascalu, M.; Kurvers, H.; Ruseti, S. Automated Essay Scoring in Applied Games: Reducing the Teacher Bandwidth Problem in Online Training. Comput. Educ. 2018, 123, 212–224. [Google Scholar] [CrossRef]
- Kyu, M.; Zouaq, A.; Mi, S. Automatic Detection of Expert Models: The Exploration of Expert Modeling Methods Applicable to Technology-Based Assessment and Instruction. Comput. Educ. 2016, 101, 55–69. [Google Scholar] [CrossRef]
- Rico-Juan, J.R.; Gallego, A.; Calvo-Zaragoza, J. Automatic Detection of Inconsistencies between Numerical Scores and Textual Feedback in Peer-Assessment Processes with Machine Learning. Comput. Educ. 2019, 140, 103609. [Google Scholar] [CrossRef]
- Gerard, L.; Linn, M.C.; Berkeley, U.C. Computer-Based Guidance to Support Students’ Revision of Their Science Explanations. Comput. Educ. 2022, 176, 104351. [Google Scholar] [CrossRef]
- Lee, D.; Yeo, S. Developing an AI-Based Chatbot for Practicing Responsive Teaching in Mathematics. Comput. Educ. 2022, 191, 104646. [Google Scholar] [CrossRef]
- Lu, X.; Liu, X.W.; Zhang, W. Diversities of Learners’ Interactions in Different MOOC Courses: How These Diversities Affects Communication in Learning. Comput. Educ. 2020, 151, 103873. [Google Scholar] [CrossRef]
- Wambsganss, T.; Janson, A.; Leimeister, J.M. Enhancing Argumentative Writing with Automated Feedback and Social Comparison Nudging. Comput. Educ. 2022, 191, 104644. [Google Scholar] [CrossRef]
- Hsu, T.; Chang, C.; Lin, Y. Effects of Voice Assistant Creation Using Different Learning Approaches on Performance of Computational Thinking. Comput. Educ. 2023, 192, 104657. [Google Scholar] [CrossRef]
- Han, S.; Lee, M.K. FAQ Chatbot and Inclusive Learning in Massive Open Online Courses. Comput. Educ. 2022, 179, 104395. [Google Scholar] [CrossRef]
- Sikström, P.; Valentini, C.; Sivunen, A.; Kärkkäinen, T. How Pedagogical Agents Communicate with Students: A Two-Phase Systematic Review. Comput. Educ. 2022, 188, 104564. [Google Scholar] [CrossRef]
- Zhu, M.; Liu, O.L.; Lee, H.S. The Effect of Automated Feedback on Revision Behavior and Learning Gains in Formative Assessment of Scientific Argument Writing. Comput. Educ. 2020, 143, 103668. [Google Scholar] [CrossRef]
- Bywater, J.P.; Chiu, J.L.; Hong, J.; Sankaranarayanan, V. The Teacher Responding Tool: Scaffolding the Teacher Practice of Responding to Student Ideas in Mathematics Classrooms. Comput. Educ. 2019, 139, 16–30. [Google Scholar] [CrossRef]
- Greenhalgh, S.P.; Rosenberg, J.M.; Staudt Willet, K.B.; Koehler, M.J.; Akcaoglu, M. Identifying Multiple Learning Spaces within a Single Teacher-Focused Twitter Hashtag. Comput. Educ. 2020, 148, 103809. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Q.; Pang, H.; Tan, S.C.; Lei, J.; Wallace, M.P.; Li, L. What Matters in AI-Supported Learning: A Study of Human-AI Interactions in Language Learning Using Cluster Analysis and Epistemic Network Analysis. Comput. Educ. 2023, 194, 104703. [Google Scholar] [CrossRef]
- Yang, B.; Tang, H.; Hao, L.; Rose, J.R. Untangling Chaos in Discussion Forums: A Temporal Analysis of Topic-Relevant Forum Posts in MOOCs. Comput. Educ. 2022, 178, 104402. [Google Scholar] [CrossRef]





| No. | Ref. | Technologies | Study Sample | Application | Target Party | Motivation |
|---|---|---|---|---|---|---|
| 1 | [44] |
Artificial neural networks + inverse kinematics algorithms | Human instructor | Teaching | Human + Students | Intangible cultural heritage |
| 2 | [45] | Child–robot interaction | Children | Educational | Students + Children |
Concentration + attention + Visualize performance |
| 3 | [41] | Telepresence | Children | Speak + Teaching | Children | Foreign language teaching |
| 4 | [46] |
Project-Based learning constructivist approach. | Master students | Training | Master students | Program both virtual + real autonomous robots |
| 5 | [47] | ___ | Pupils | Teaching | Students | Timetables |
| 6 | [48] | Review | Children | Teaching + learning | Children | Improvement in student learning |
| 7 | [49] | Review | Hybrid | Speech | All | learning |
| 8 | [50] | Proposal + preliminary | Hybrid | Speech recognition | All | Learning + education |
| 9 | [51] | Robots in education | Hybrid | -- | All | study |
| 10 | [52] | Bridging robotics education | High school + university | Speak + Teaching | Students | Education challenge |
| No. | Ref. | Type of Application | Name Technologies | Variables (Independent/ Dependent) | Method | Outcome | Activity/ Purpose of the Study |
|---|---|---|---|---|---|---|---|
| 1 | [53] | Mobile applications | Mobile-assisted language learning Mobile-Assisted Language Learning (MALL) | 58 teachers + WhatsApp + U-Dictionary + email | Evaluated by using a writing test and a critical thinking test | Capability on critical thinking for teachers | Improve English writing skills |
| 2 | [54] | - | Educational dictionary platform | Multimedia textbook + a multilingual dictionary + audio of conversational phrasebooks | Multilingual electronic dictionary | Electronic educational complex | Teaching students of the Uzbek language outside Uzbekistan |
| 3 | [55] | Tests | The project makes the most of a learning management system | 600 students + 5 different tests + different languages, | Design and creation of tests to be carried out through the consultation of online dictionaries | Students who use dictionaries perform better | Teaching + translation |
| 4 | [56] | Experiments | OJAD (Online Japanese Accent Dictionary) | Visual + auditory + systematic + comprehensive | Dictionary | Generate its adequate word accent + phrase intonation | Aid teaching + learning |
| 5 | [57] | Training IT students | Q&A | Foreign languages + IT students | General language training of students. | Programs for machine translation | Technical translation+ search + read |
| 6 | [58] | -- | Review | Digital libraries + databases+ online courses+ electronic textbooks+ dictionary + translators in Latin | review electronic resources in Latin | Opened access to vast resources of libraries+ using the scientific and educational potential and experience in teaching Latin | Development of e-learning tools + websites for the study of Latin in Ukraine |
| 7 | [59] | Combining advanced methods | Proposed a variant of Byte-Pair Encoding (BPE) algorithm | Methods in Japanese Vietnamese | Created the first NMT systems for Japanese to Vietnamese | Neural Machine translation | Translation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younis, H.A.; Ruhaiyem, N.I.R.; Ghaban, W.; Gazem, N.A.; Nasser, M. A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education. Electronics 2023, 12, 2864. https://doi.org/10.3390/electronics12132864
Younis HA, Ruhaiyem NIR, Ghaban W, Gazem NA, Nasser M. A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education. Electronics. 2023; 12(13):2864. https://doi.org/10.3390/electronics12132864
Chicago/Turabian StyleYounis, Hussain A., Nur Intan Raihana Ruhaiyem, Wad Ghaban, Nadhmi A. Gazem, and Maged Nasser. 2023. "A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education" Electronics 12, no. 13: 2864. https://doi.org/10.3390/electronics12132864
APA StyleYounis, H. A., Ruhaiyem, N. I. R., Ghaban, W., Gazem, N. A., & Nasser, M. (2023). A Systematic Literature Review on the Applications of Robots and Natural Language Processing in Education. Electronics, 12(13), 2864. https://doi.org/10.3390/electronics12132864