
Mobile Robot Path Planning Algorithm Based on RRT_Connect


Abstract
:1. Introduction
- (1)
- The bidirectional search algorithm was adopted in the algorithm to increase the convergence rate.
- (2)
- A target-point and searched-node biased strategy was proposed and applied to the RRT_Connect algorithm to improve the search efficiency.
- (3)
- For the purpose of further enhancing the quality of planned paths, the algorithm suggested an improved RRT_Connect algorithm for optimizing searched nodes, and planned partial paths were brought forward for the algorithm by screening effective new nodes and parent nodes of neighboring nodes within a certain range.
2. RRT Algorithm and RRT_Connect Algorithm
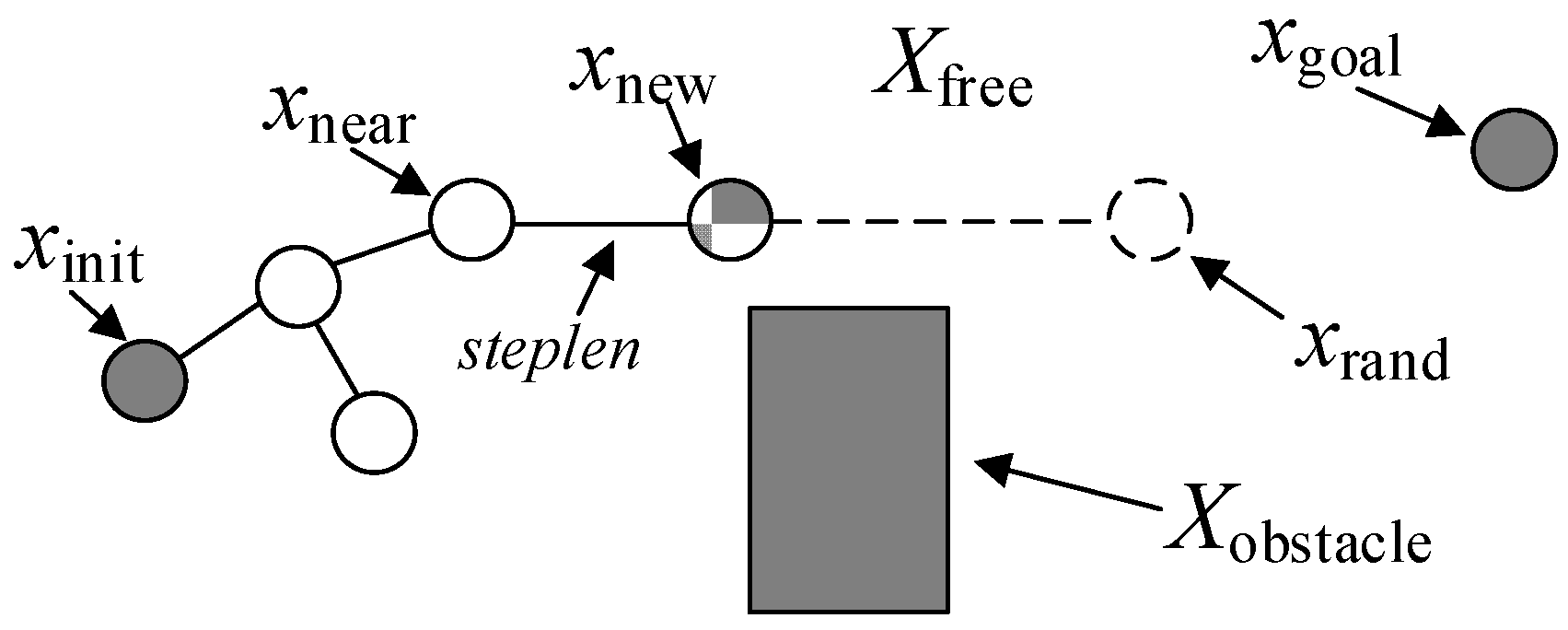
2.1. RRT Algorithm
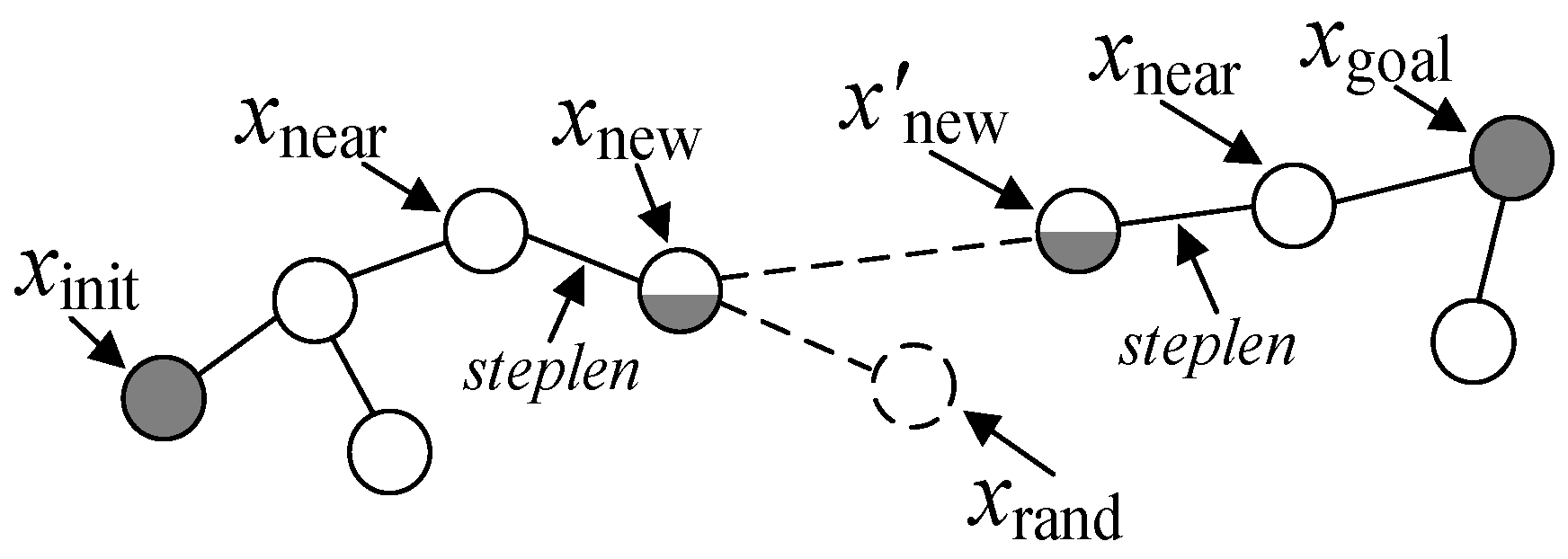
2.2. RRT_Connect Algorithm
3. Improved RRT_Connect Algorithm
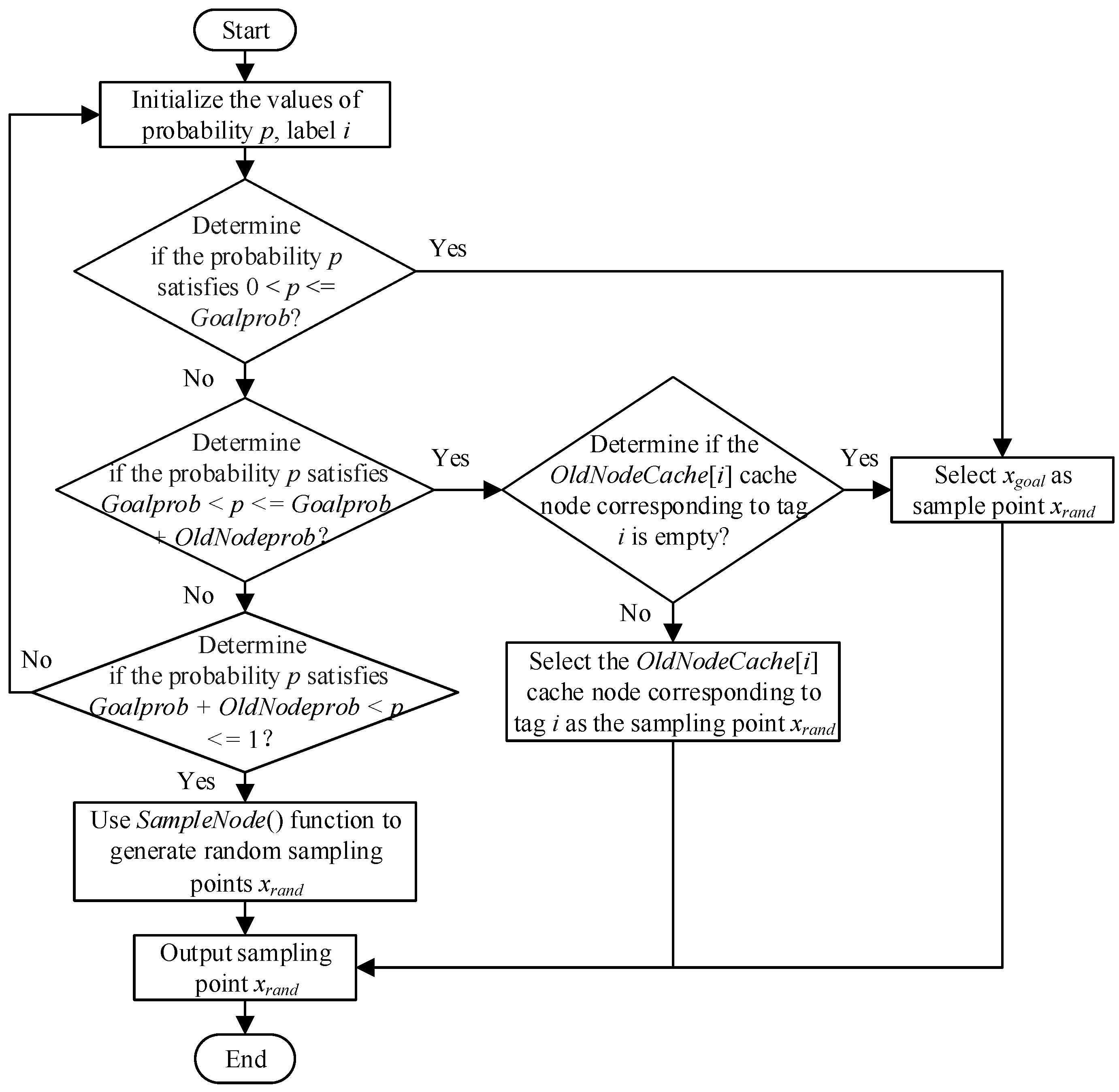
3.1. Improvement of the Random Sampling Function
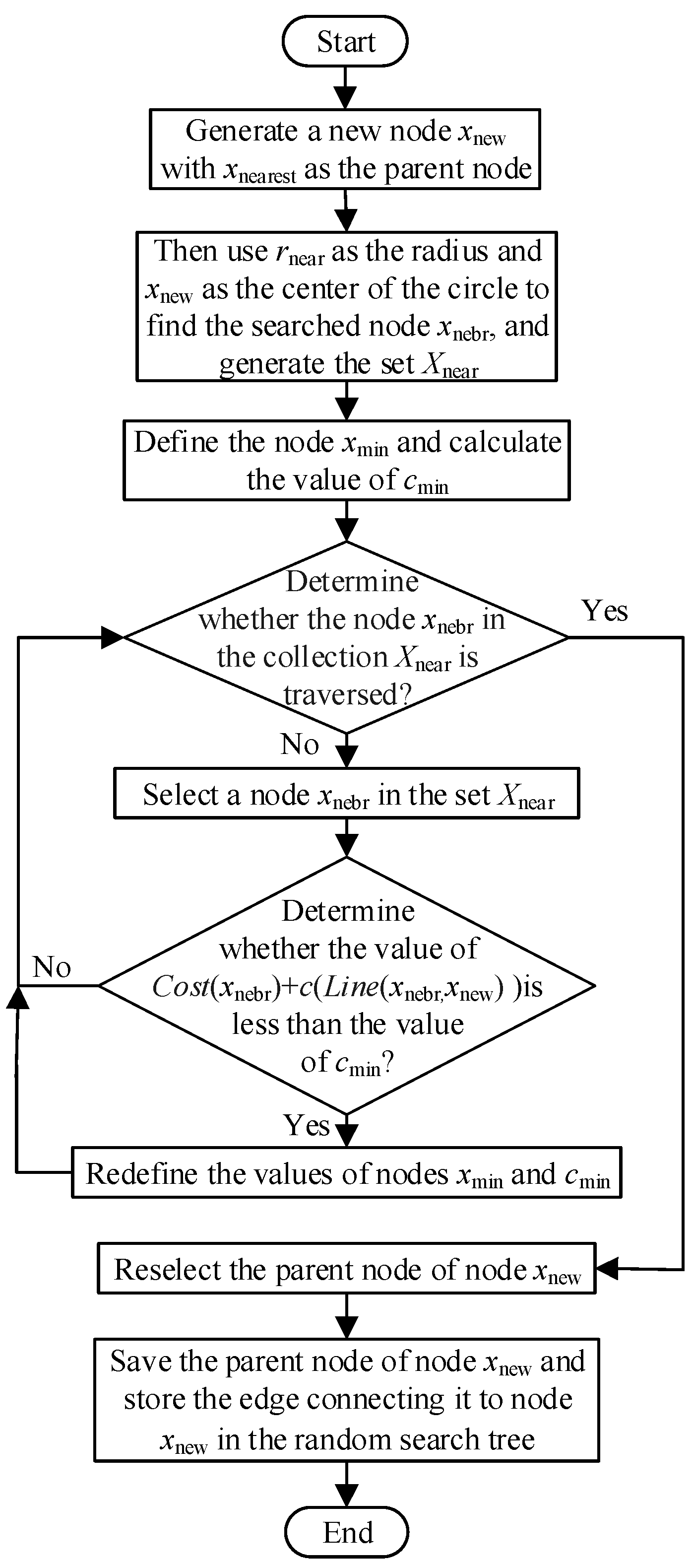
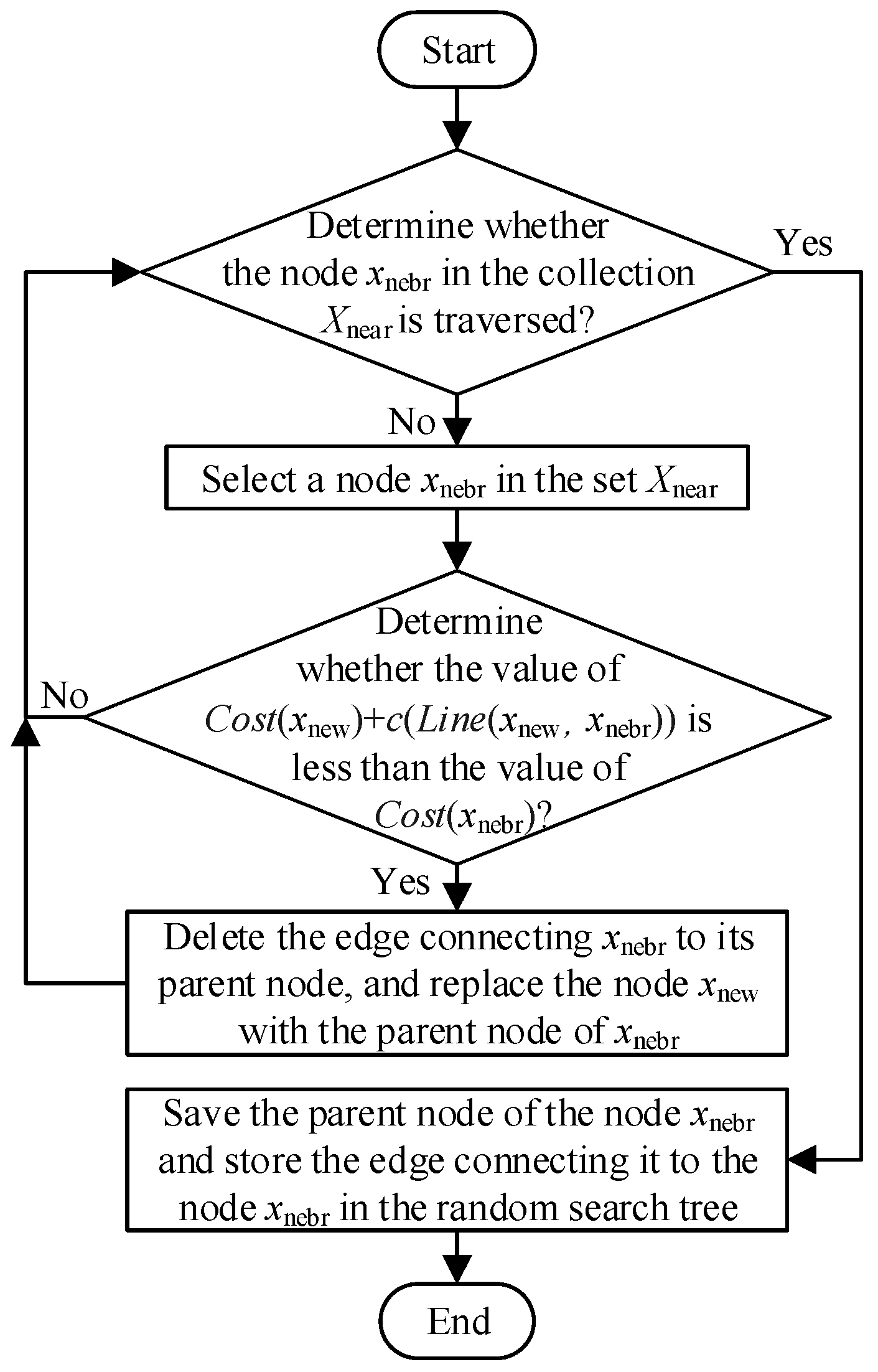
3.2. Improvements of Searched Nodes and Planned Partial Paths
3.3. Implementation of the Improved RRT_Connect Algorithm
4. Experiments and Result Analysis
4.1. Simulation Experiments and Result Analysis



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Scene 1: Multi-Type Obstacle Scene | ||
| Algorithm | RRT_Connect Algorithm | Improved RRT_Connect Algorithm |
| average pathfinding time (s) | 12.34 | 13.84 |
| average length of the planned path (m) | 80.49 | 64.75 |
| average number of search iterations (times) | 125.56 | 117.15 |
| average number of search iteration nodes | 76.98 | 75.13 |
| average number of turns (times) | 17.00 | 7.00 |
| average planning success rate (%) | 95.00 | 96.00 |
| Experimental Scene 2: Well-Shaped Surrounding Obstacle Scene | ||
| Algorithm | RRT_Connect Algorithm | Improved RRT_Connect Algorithm |
| average pathfinding time (s) | 36.35 | 32.61 |
| average length of the planned path (m) | 89.68 | 70.72 |
| average number of search iterations (times) | 355.91 | 308.89 |
| average number of search iteration nodes | 137.64 | 126.06 |
| average number of turns (times) | 15.00 | 6.00 |
| average planning success rate (%) | 88.00 | 90.00 |
| Experimental Scene 3: Long Passage Obstacle Scene | ||
| Algorithm | RRT_Connect Algorithm | Improved RRT_Connect Algorithm |
| average pathfinding time (s) | 47.12 | 33.20 |
| average length of the planned path (m) | 105.85 | 85.83 |
| average number of search iterations (times) | 548.36 | 428.76 |
| average number of search iteration nodes | 157.48 | 139.79 |
| average number of turns (times) | 20.00 | 6.00 |
| average planning success rate (%) | 85.00 | 88.00 |
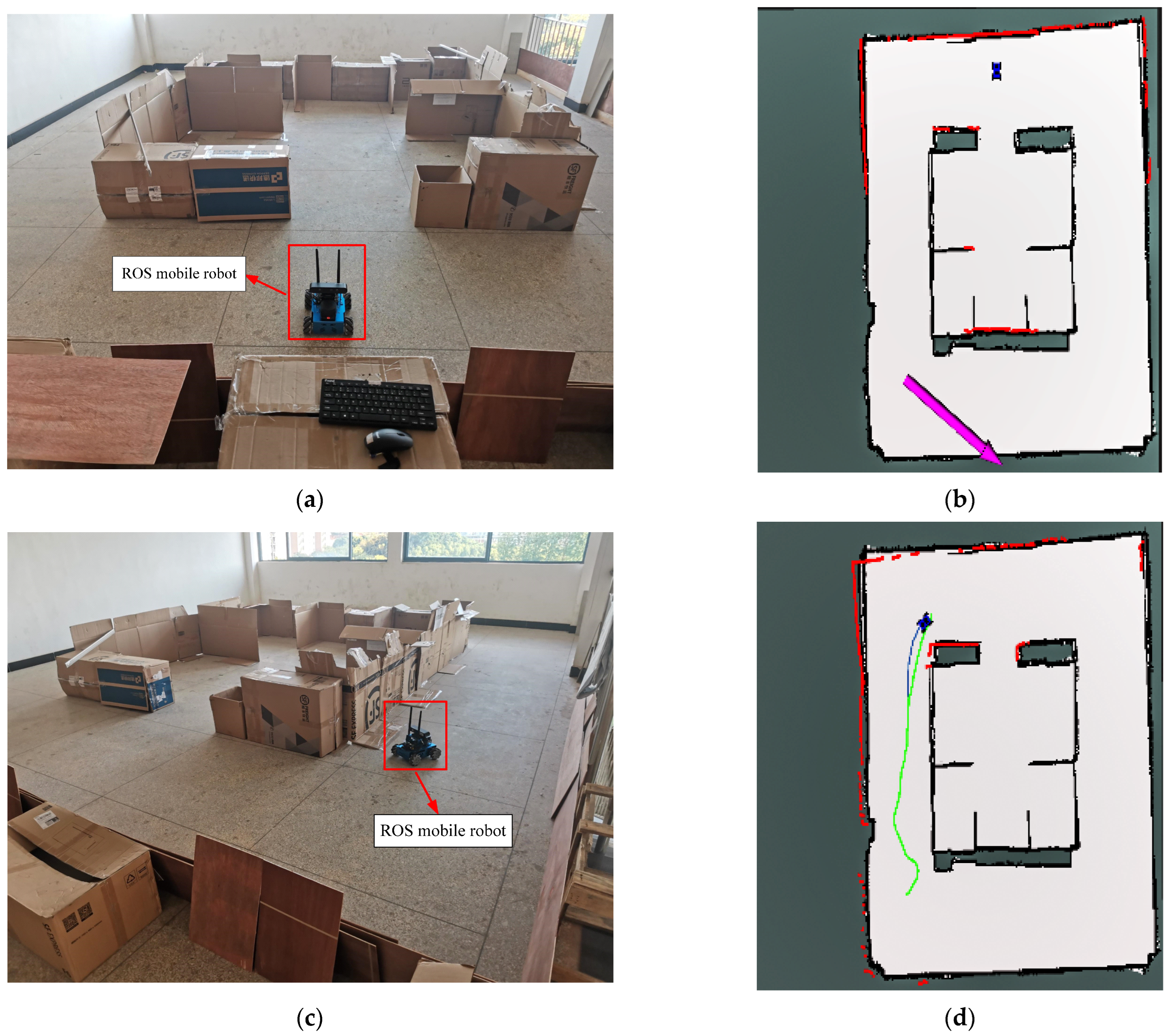
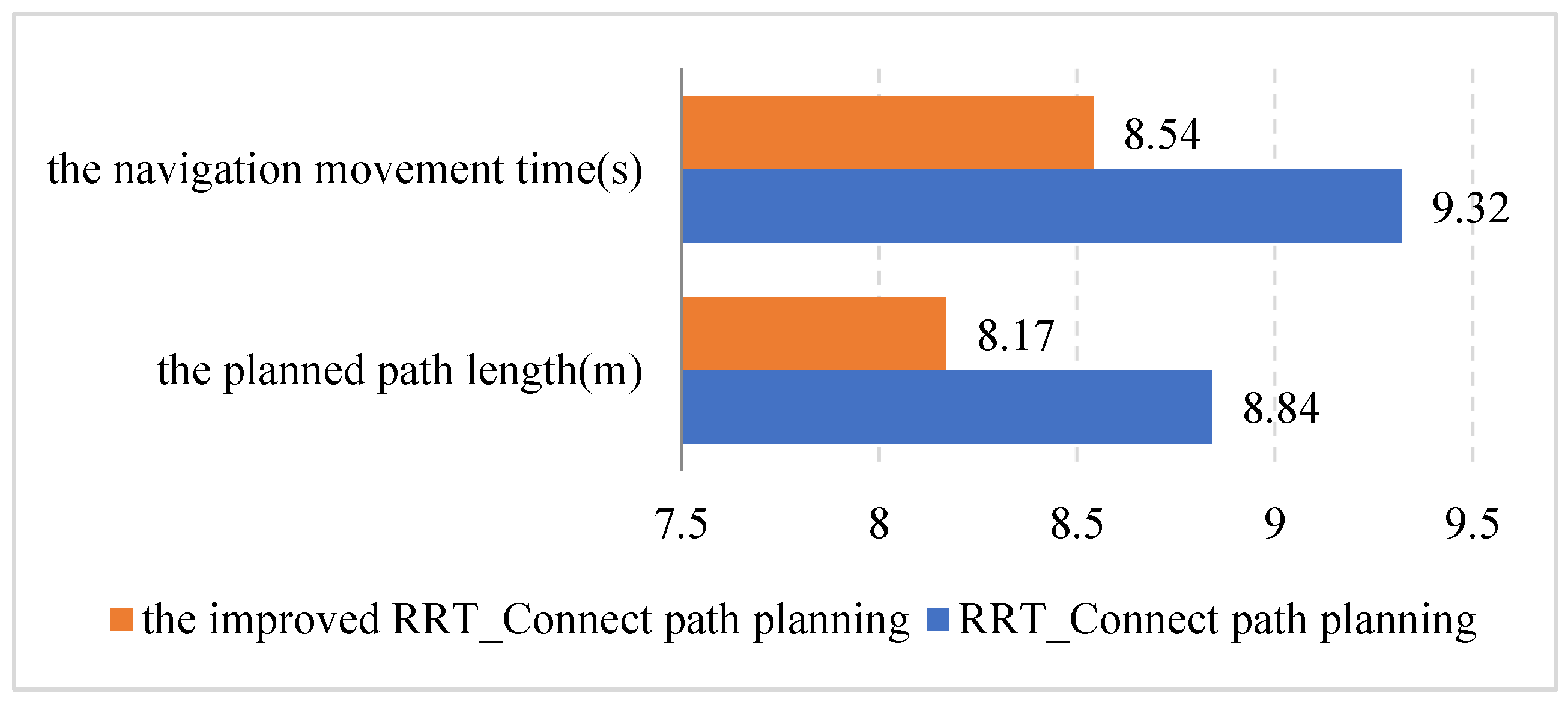
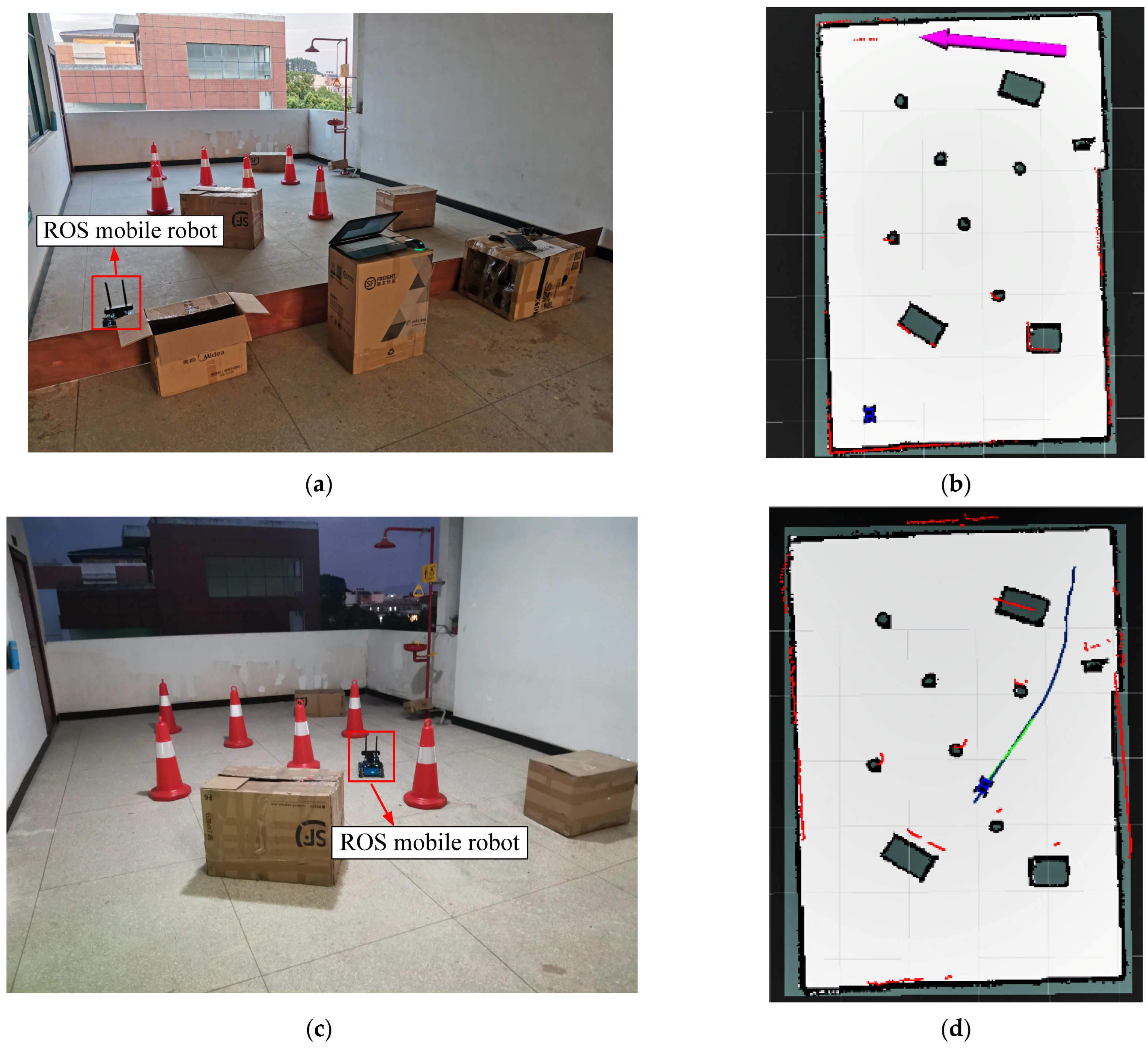
4.2. Experiments in Actual Scenes and Result Analysis
5. Conclusions
- (1)
- Firstly, based on the goal-biased concept, a target-point and searched-node biased strategy was developed, which introduced the reference values of the target-point bias probability and searched-node bias probability into the random sampling function, thereby increasing the search efficiency by setting the random sampling point as the target point or searched node according to the random probability. Next, an improved RRT_Connect algorithm for optimizing the searched nodes and planned partial paths was formulated, which reduced the cost of path planning and improved the quality of planned paths by filtering new effective nodes and parent nodes of neighboring nodes within a certain range.
- (2)
- Simulation experiments and actual scene experiments were carried out to verify the improved RRT_Connect algorithm and compare it with the traditional RRT_Connect algorithm. The experimental results manifested that the improved RRT_Connect algorithm decreased the time and length of path planning, reduced the number of search iterations and newly generated nodes, accelerated convergence of the algorithm, and lowered the energy consumption of the system memory.
- (3)
- Although the improved RRT_Connect algorithm outperformed the traditional algorithm by improving the search efficiency and the quality of planned paths, it was still subjected to great variation in the length of optimized paths due to the characteristics of random sampling, inducing the necessary processes of evaluation, screening or filtering in path optimization. Furthermore, in the present research on path planning, the designed simulation scenes and actual scenes were all in static states despite certain complexity. In the future, therefore, dynamic scenes, including dynamic obstacles and dynamic target points, should be incorporated for further research and discussion.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A localization based on unscented Kalman filter and particle filter localization algorithms. IEEE Access 2020, 8, 2233–2246. [Google Scholar] [CrossRef]
- Shi, Z.; Mei, S.; Shao, Y.; Wan, R.; Song, Z.; Xie, M.; Li, Y. Research status and Prospect of mobile robot path planning based on artificial potential field method. China J. Agric. Mach. Chem. 2021, 42, 182–188. [Google Scholar]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II-Express Briefs 2022, 69, 1129–1133. [Google Scholar] [CrossRef]
- Tang, F.; Pedrycz, W. An improved DV-Hop algorithm based on differential simulated annealing evolution. Int. J. Sens. Netw. 2022, 38, 1–11. [Google Scholar] [CrossRef]
- Wen, J.; Yang, J.; Wang, T. Path planning for autonomous underwater vehicles under the influence of ocean currents based on a fusion heuristic algorithm. IEEE Trans. Veh. Technol. 2021, 70, 8529–8544. [Google Scholar] [CrossRef]
- Cao, R.; Zhang, Z.; Li, S.; Zhang, M.; Li, H.; Li, M. Multi machine collaborative global path planning based on improved A~* algorithm and Bezier curve. J. Agric. Mach. 2021, 52, 548–554. [Google Scholar]
- Gao, M.; Tang, H.; Zhang, P. Research status of robot cluster path planning technology. J. Natl. Univ. Def. Technol. 2021, 43, 127–138. [Google Scholar]
- Xu, X.; Yu, X.; Zhao, Y.; Liu, C.; Wu, X. Global path planning of mobile robot based on improved genetic algorithm. Comput. Integr. Manuf. Syst. 2022, 28, 1659–1672. [Google Scholar]
- Meng, B.H.; Godage, I.S.; Kanj, I. RRT*-Based Path Planning for Continuum Arms. IEEE Robot. Autom. Lett. 2022, 7, 6830–6837. [Google Scholar] [CrossRef]
- Yi, J.; Yuan, Q.; Sun, R.; Bai, H. Path planning of a manipulator based on an improved P_RRT* algorithm. Complex Intell. Syst. 2022, 8, 2227–2245. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Fu, Y.; Zhang, B.; Fu, W.; Shen, C. Path planning of the fruit tree pruning manipulator based on improved RRT-Connect algorithm. Int. J. Agric. Biol. Eng. 2022, 15, 177–188. [Google Scholar] [CrossRef]
- An, H.; Hu, J.; Lou, P. Obstacle Avoidance Path Planning Based on Improved APF and RRT. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1028–1032. [Google Scholar]
- Zong, C.; Han, X.; Zhang, D.; Liu, Y.; Zhao, W.; Sun, M. Research on local path planning based on improved RRT algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2086–2100. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, G.; Zhang, W.; Pan, X. An efficient RRT cache method in dynamic environments for path planning. Robot. Auton. Syst. 2020, 131, 103595. [Google Scholar] [CrossRef]
- Ghosh, D.; Nandakumar, G.; Narayanan, K.; Honkote, V.; Sharma, S. Kinematic Constraints Based Bi-directional RRT (KB-RRT) with Parameterized Trajectories for Robot Path Planning in Cluttered Environment. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 8627–8633. [Google Scholar]
- Ruan, X.; Zhou, J.; Zhang, J.; Zhu, X. Robot target oriented RRT path planning algorithm based on sub target search. Control. Decis. Mak. 2020, 35, 2543–2548. [Google Scholar]
- Long, J.; Liang, Y. Improved Bi RRT path planning under multiple narrow intersections. Instrum. Technol. Sens. 2019, 436, 118–123. [Google Scholar]
- Wang, K.; Huang, B.; Zeng, G.; Li, X. Fast path planning algorithm based on improved RRT connect. J. Wuhan Univ. Sci. Ed. 2019, 65, 283–289. [Google Scholar]
- Lin, Y.; Chen, Y.; He, B.; Huang, Y.; Wang, Y. Mobile robot motion planning method without collision detection RRT~*. J. Instrum. 2020, 41, 257–267. [Google Scholar]
- Zhao, C.; Ma, X.; Zhang, C.; Mu, C. RRT connect path planning algorithm based on gravitational field guidance. Electron. Meas. Technol. 2021, 44, 44–49. [Google Scholar]
- Yang, H.; Li, H.; Liu, K.; Yu, W.; Li, X. Research on path planning based on improved RRT-Connect algorithm. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5707–5712. [Google Scholar]
- Chen, J.; Zhao, Y.; Xu, X. Improved RRT-Connect Based Path Planning Algorithm for Mobile Robots. IEEE Access 2021, 9, 145988–145999. [Google Scholar] [CrossRef]
- Kang, T.W.; Kang, J.G.; Jung, J.W. A Bidirectional Interpolation Method for Post-Processing in Sampling-Based Robot Path Planning. Sensors 2021, 21, 7425. [Google Scholar] [CrossRef]
- Veras, L.; Medeiros, F.; Guimaraes, L. Systematic literature review of sampling process in Quick-exploring random trees. IEEE Access 2019, 7, 50933–50953. [Google Scholar] [CrossRef]
- Wang, D.; Zheng, S.; Ren, Y.; Du, D. Path Planning Based on the Improved RRT* Algorithm for the Mining Truck. CMC–Comput. Mater. Contin. 2022, 71, 3571–3587. [Google Scholar] [CrossRef]
- Wang, H.; Gao, M.; Wang, J.; Fang, L.; Li, H. Multi scene motion planning of manipulator based on improved rrt~*-connect algorithm. J. Agric. Mach. 2022, 53, 432–440. [Google Scholar]
- Wang, Y. Research on Path Planning Method of Wheeled Robot Based on RRT; Tianjin University of Technology: Tianjin, China, 2019. [Google Scholar]
- Qi, J.; Yang, H.; Sun, H. MOD-RRT*: A Sampling-Based Algorithm for Robot Path Planning in Dynamic Environment. IEEE Trans. Ind. Electron. 2021, 68, 7244–7251. [Google Scholar] [CrossRef]



| References | Improvement Strategies | Advantages | Limitations |
|---|---|---|---|
| [12] | Combine with the APF algorithm and introduce a heuristic factor into RRT | Improve the speed and success rate of planning | Non-optimal path |
| [13] | Combine with Gaussian distribution sampling and local bias sampling | Improve the search efficiency in the sampling phase | Large amount of data and long search time |
| [14] | The relay node method is introduced | Planning path in a dynamic environment in real-time | High path cost |
| [15] | Combining kinematic constraints to limit the number of nodes | Adapt to a complex environment | You have to use the kinematic equation to constrain the equation |
| [16] | Introduce a goal-directed function | It can solve the local minimal problem easily encountered in local path planning | Computationally heavy |
| [17] | Introduce a virtual target area for navigation | Handle multiple narrow intersections environment well | Planned path zigzag |
| [18] | The third node is selected as the extension point, and the adaptive step size adjustment function is introduced | Improve the efficiency of path planning and reduce the number of iterations | Only adapt to a simple environment with fewer obstacles |
| [19] | Add a collision risk assessment function to the cost function | Strong obstacle avoidance ability and high wayfinding efficiency. | Path quality difference |
| [20] | The third node is selected as the new extension node, and a gravitational field is superimposed on each node to guide the direction of node generation | Fast response speed and high success rate | Poor continuity |
| [21] | Introduce the target bias policy | Improve exploration efficiency and achieve path smoothing | Computationally heavy |
| [22] | Introduce a third node and target bias policy | High search efficiency | It doesn’t fit into three dimensions |
| [23] | The bidirectional interpolation method is introduced | Short path length and fast planning efficiency | Poor reliability and oscillations |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Shi, X.; Yi, Y.; Tang, L.; Peng, J.; Zou, J. Mobile Robot Path Planning Algorithm Based on RRT_Connect. Electronics 2023, 12, 2456. https://doi.org/10.3390/electronics12112456
Zhang L, Shi X, Yi Y, Tang L, Peng J, Zou J. Mobile Robot Path Planning Algorithm Based on RRT_Connect. Electronics. 2023; 12(11):2456. https://doi.org/10.3390/electronics12112456
Chicago/Turabian StyleZhang, Lieping, Xiaoxu Shi, Yameng Yi, Liu Tang, Jiansheng Peng, and Jianchu Zou. 2023. "Mobile Robot Path Planning Algorithm Based on RRT_Connect" Electronics 12, no. 11: 2456. https://doi.org/10.3390/electronics12112456
APA StyleZhang, L., Shi, X., Yi, Y., Tang, L., Peng, J., & Zou, J. (2023). Mobile Robot Path Planning Algorithm Based on RRT_Connect. Electronics, 12(11), 2456. https://doi.org/10.3390/electronics12112456