
Ultra-Low-Cost and Ultra-Low-Power, Miniature Acoustic Modems Using Multipath Tolerant Spread-Spectrum Techniques



Abstract
:1. Introduction
1.1. First Generation Experimental Prototypes
1.2. Paper Outline
2. Aim
- Operating Range: up to 2 km in typical sea conditions, including shallow-water, reverberation limited channels;
- Data rate: >100 bit /s;
- Battery Life in IoUT application: >12 months;
- Volume: <100 cm3 (including transducer) for use on micro AUV platforms;
- Production cost: <£100.
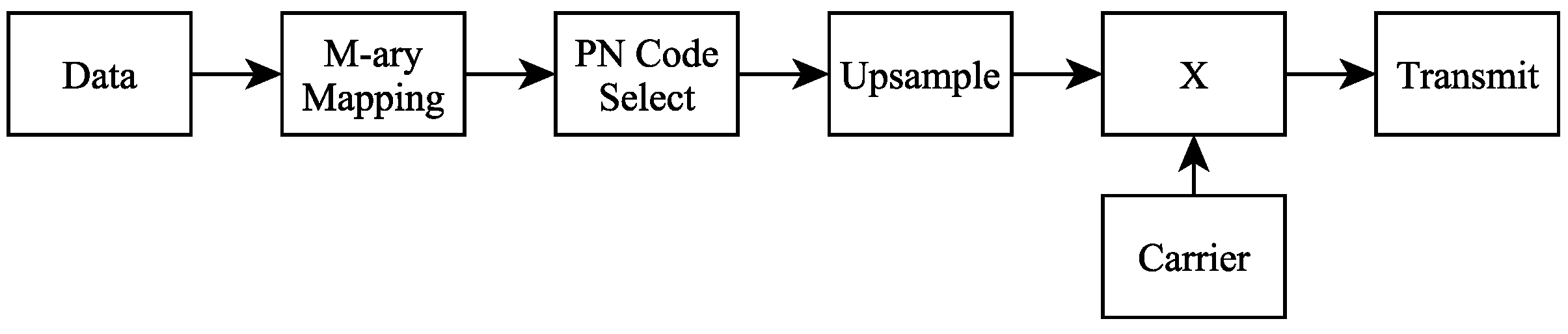
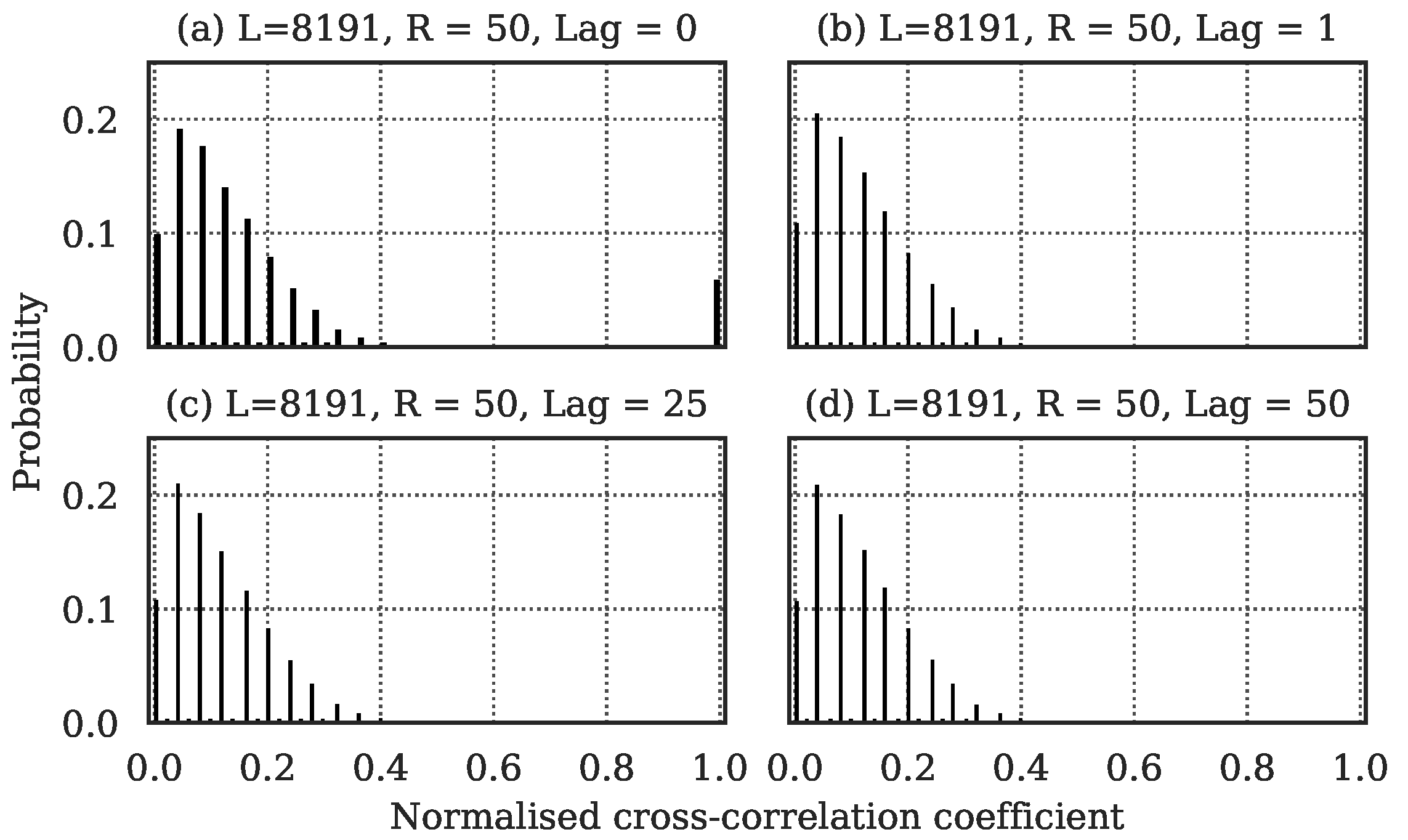
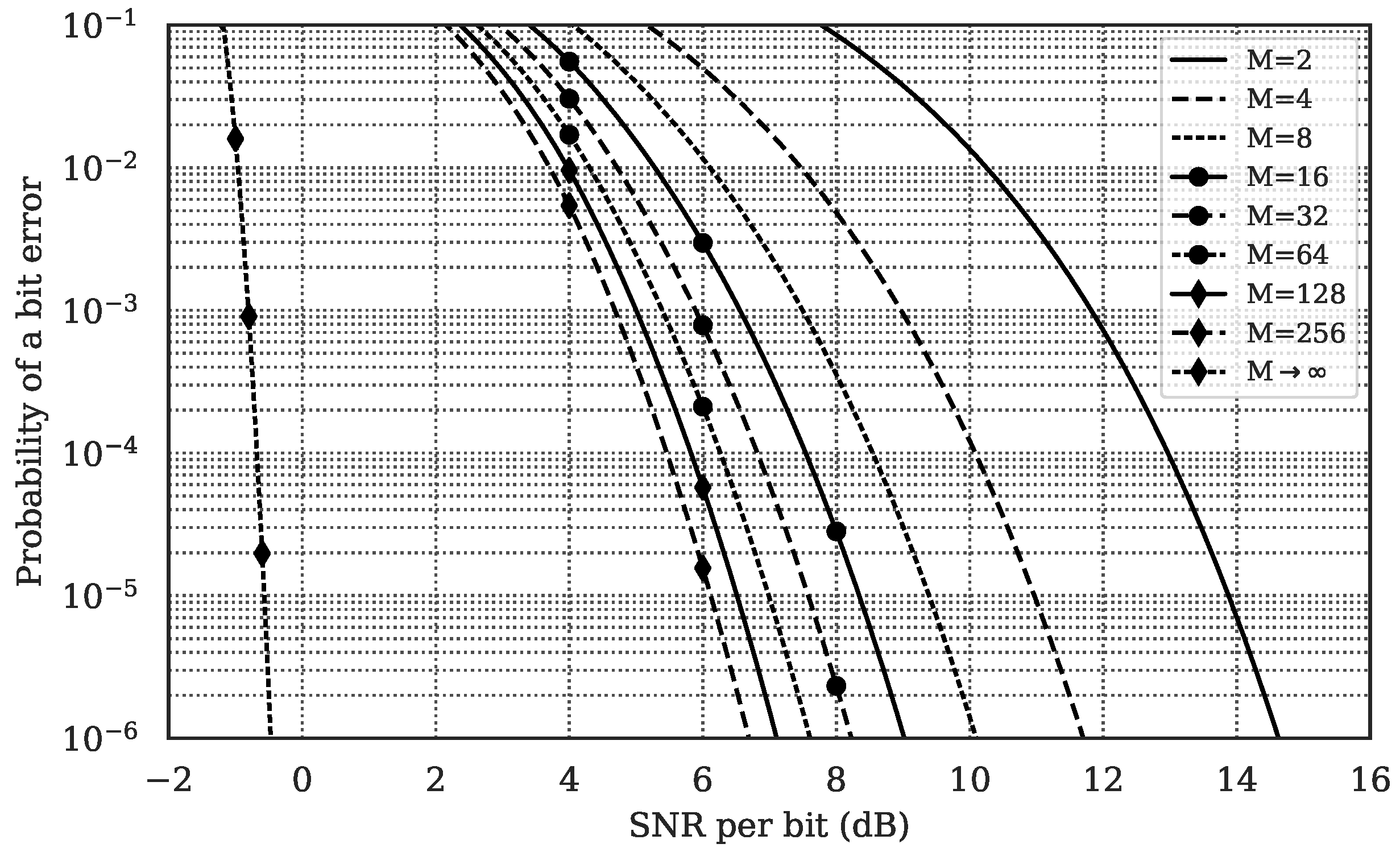
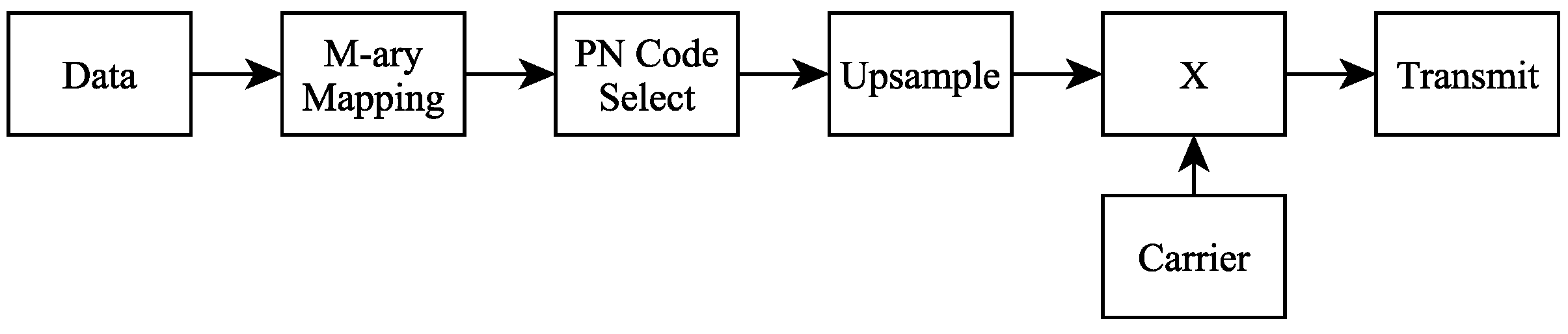
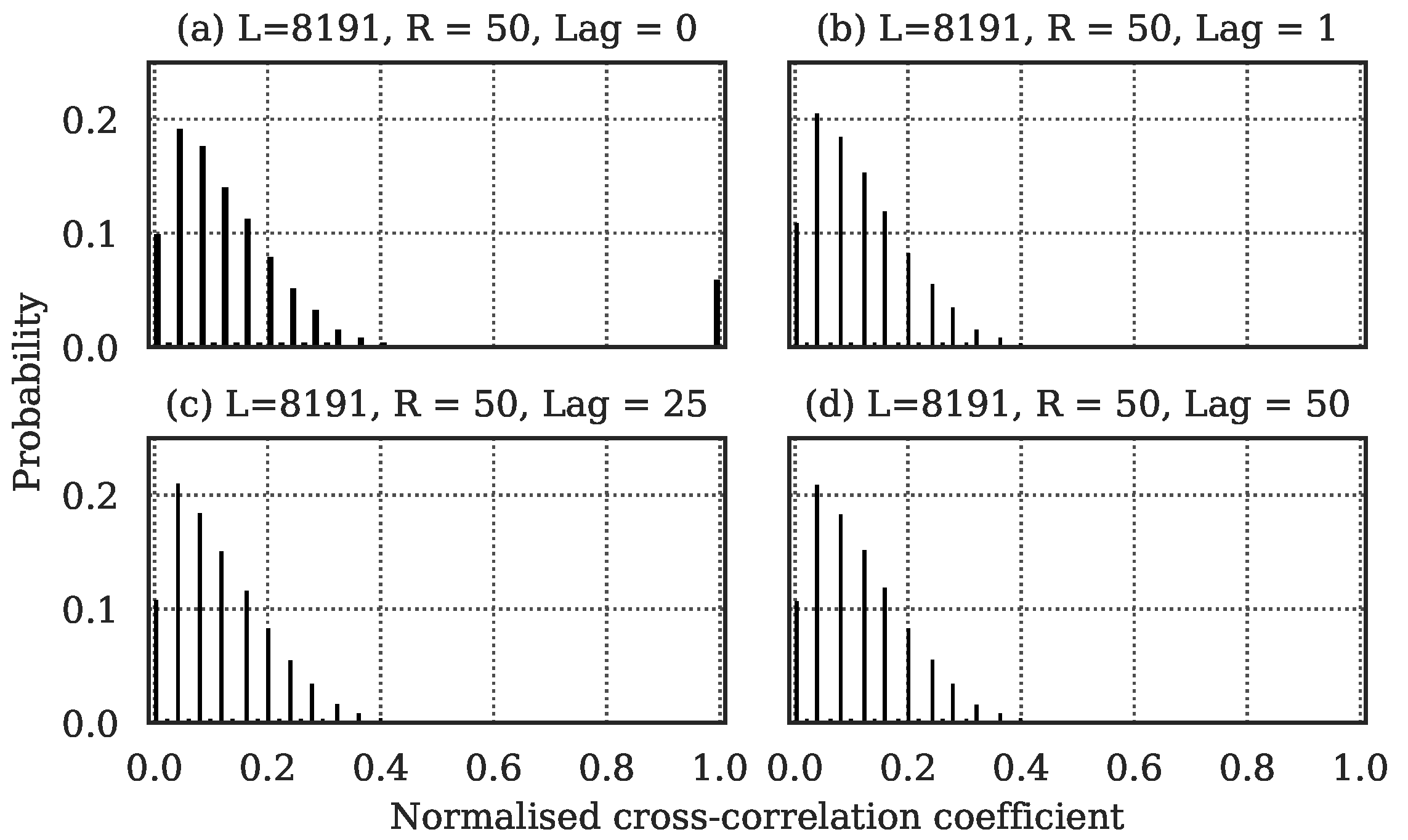
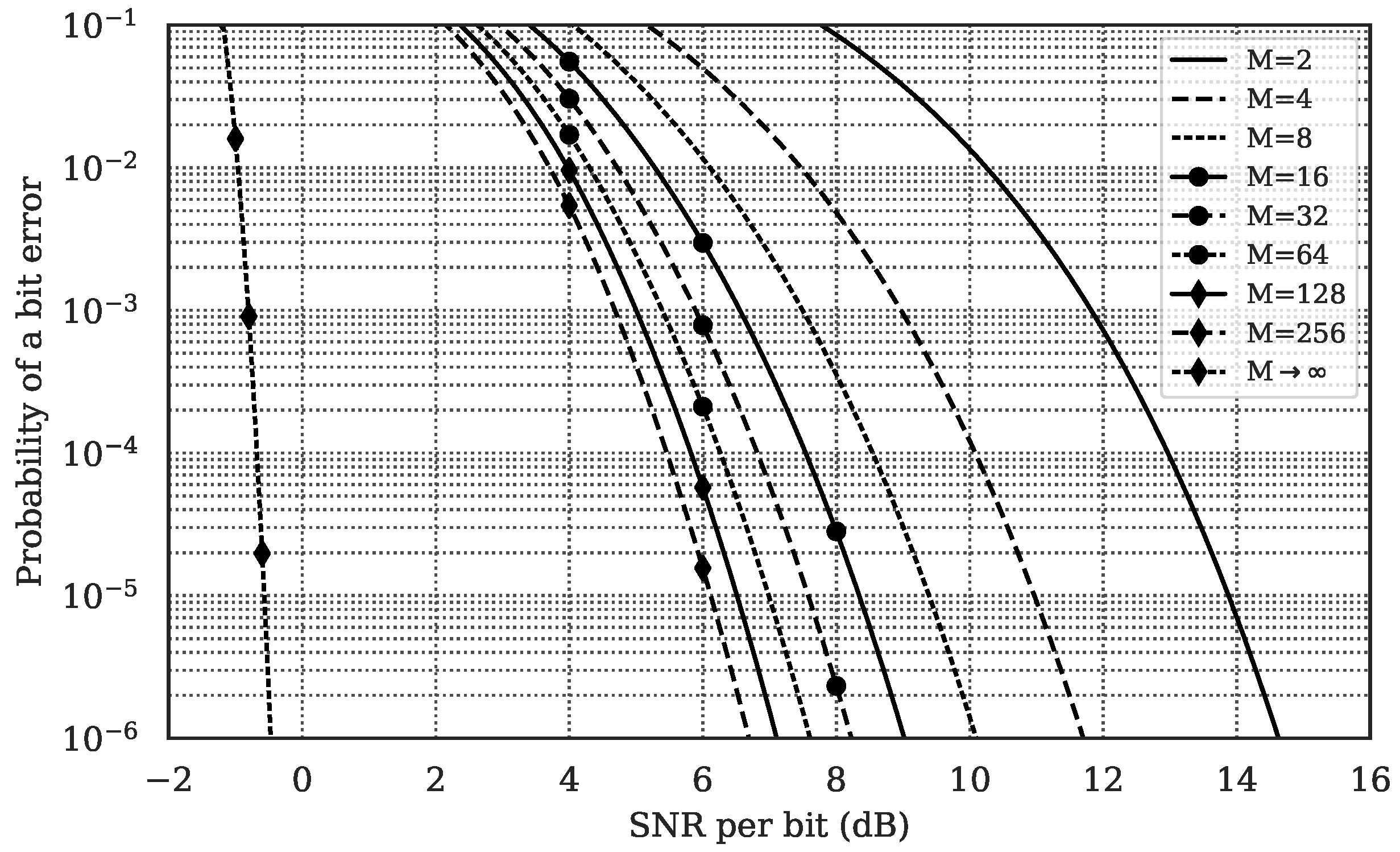
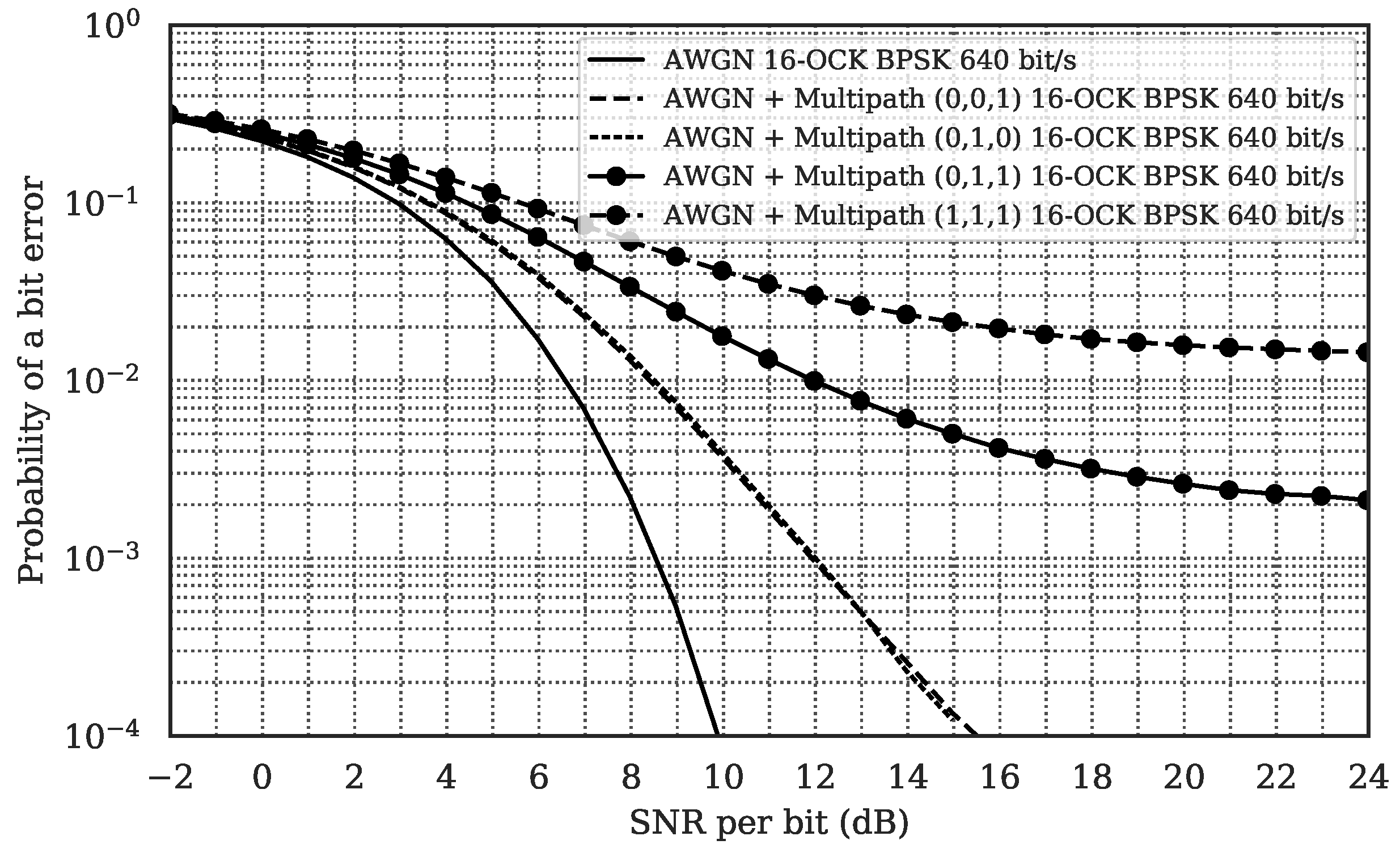
3. Signal Design
4. Implementation: Modem Hardware, Packet Structure, and Receiver Design
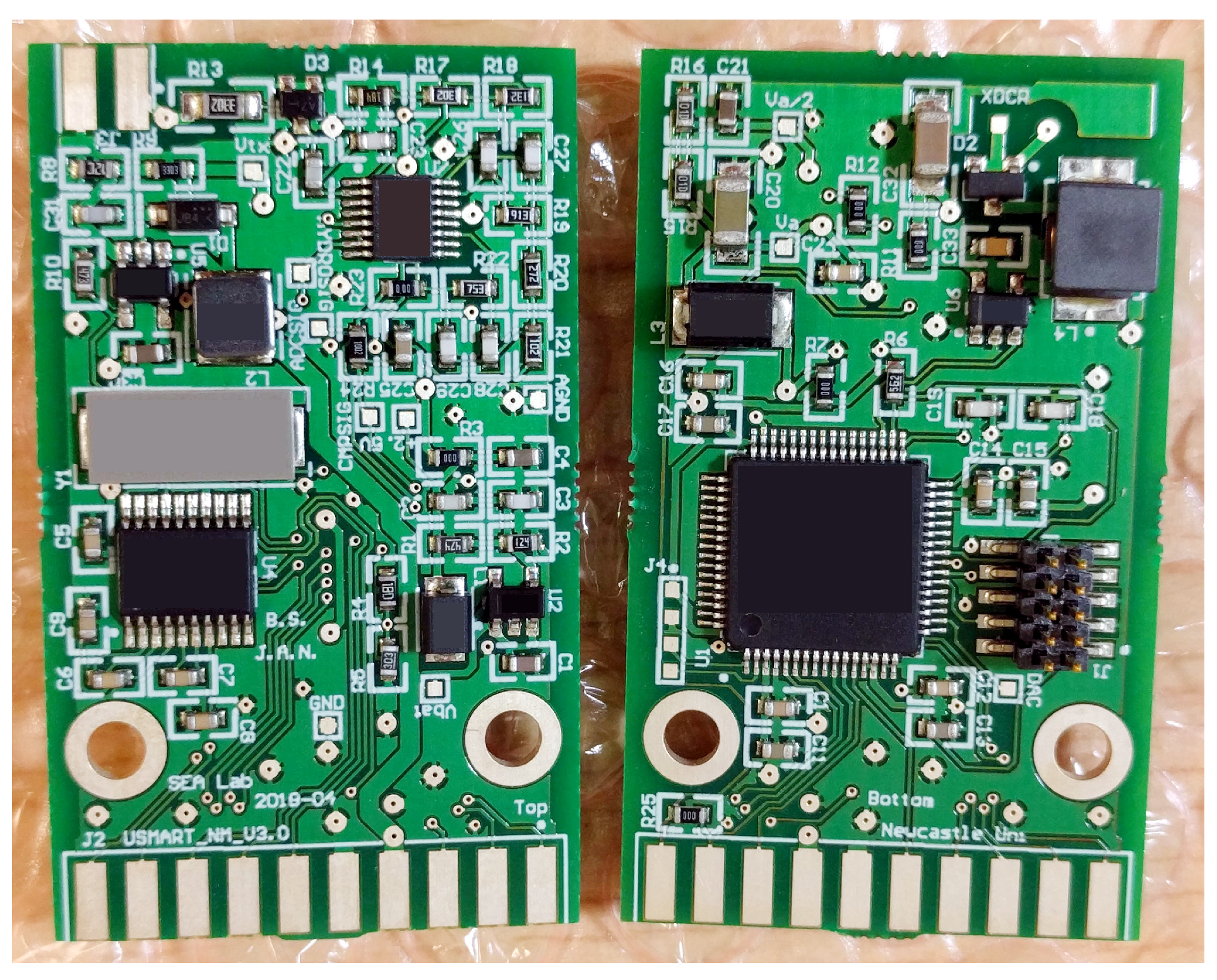
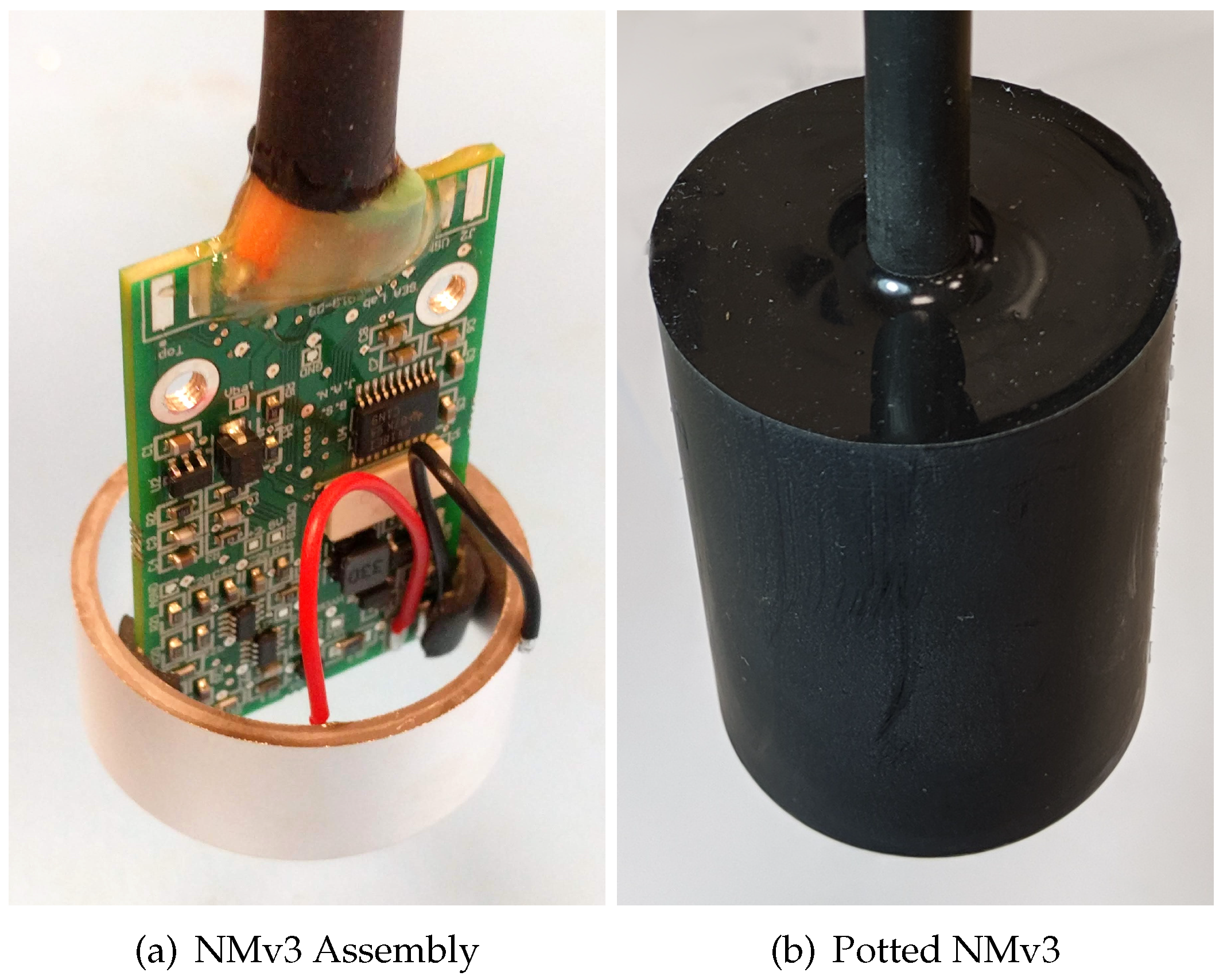
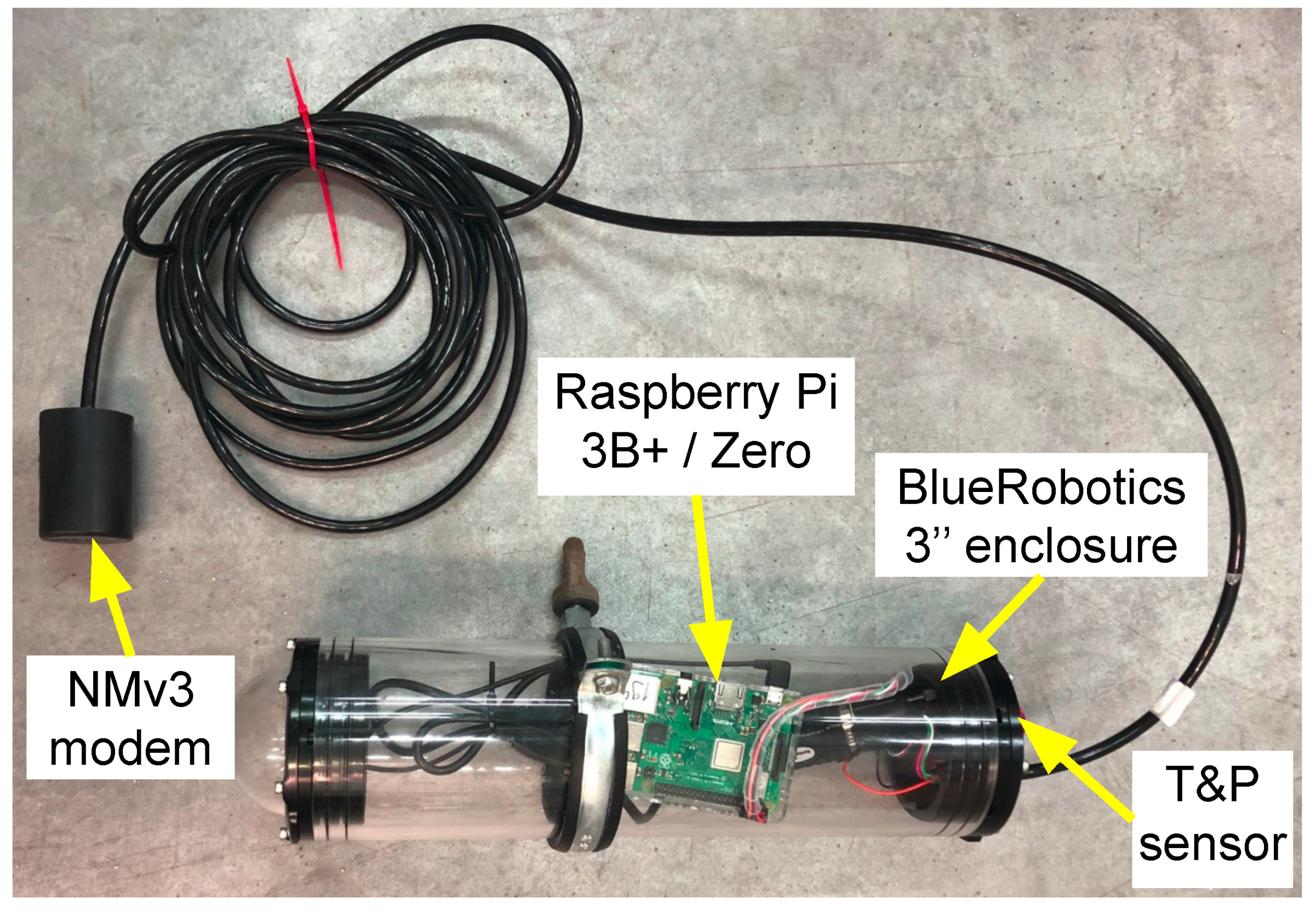
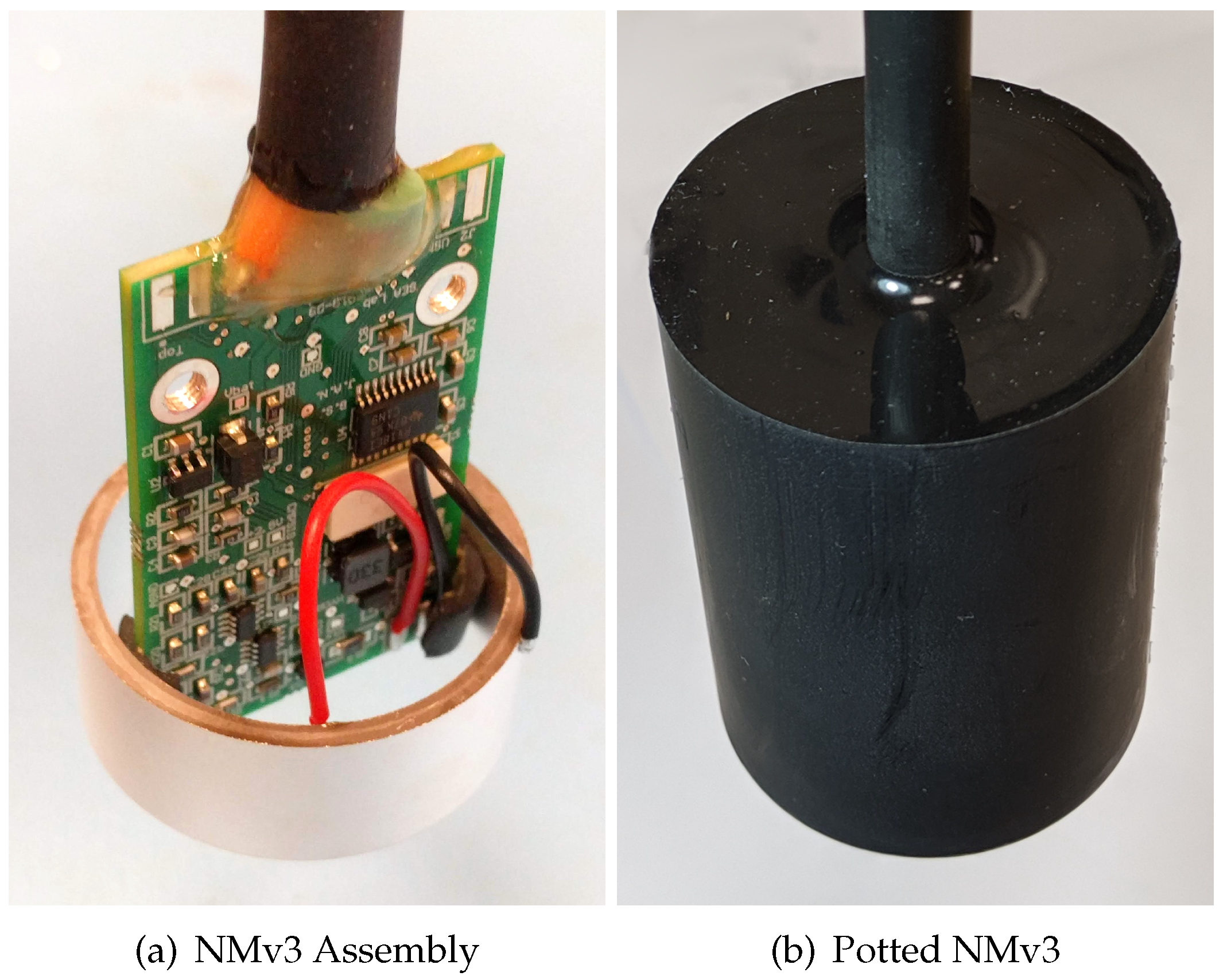
4.1. Hardware Assembly and Electronics
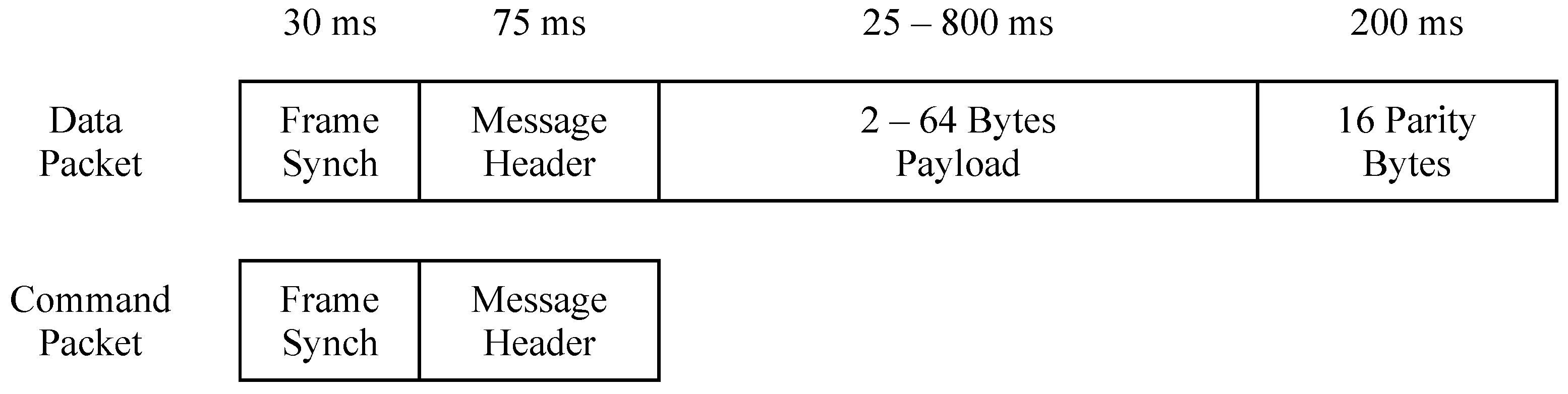
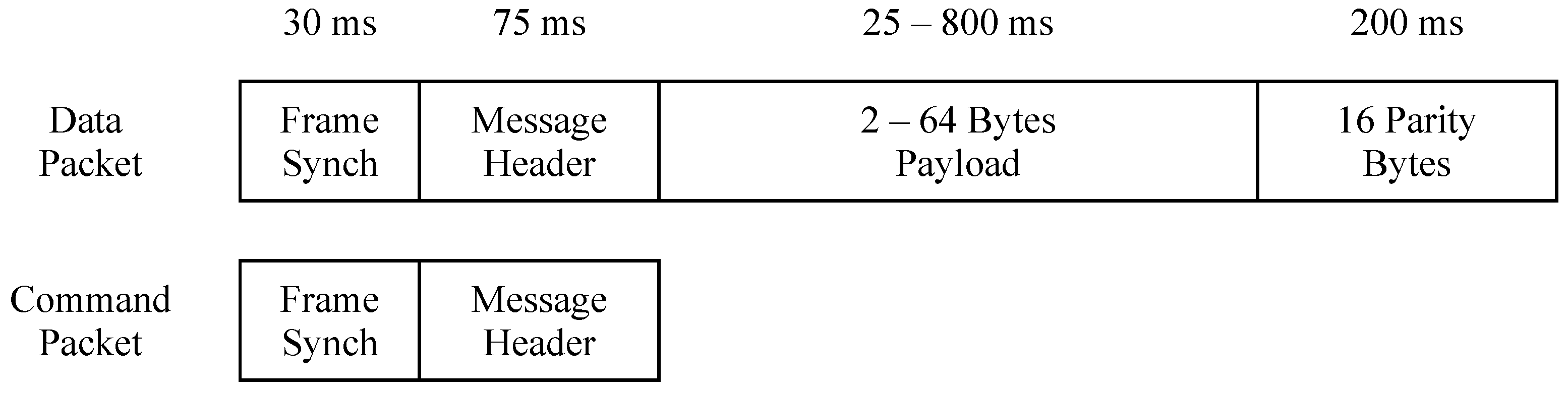
4.2. Packet Structure
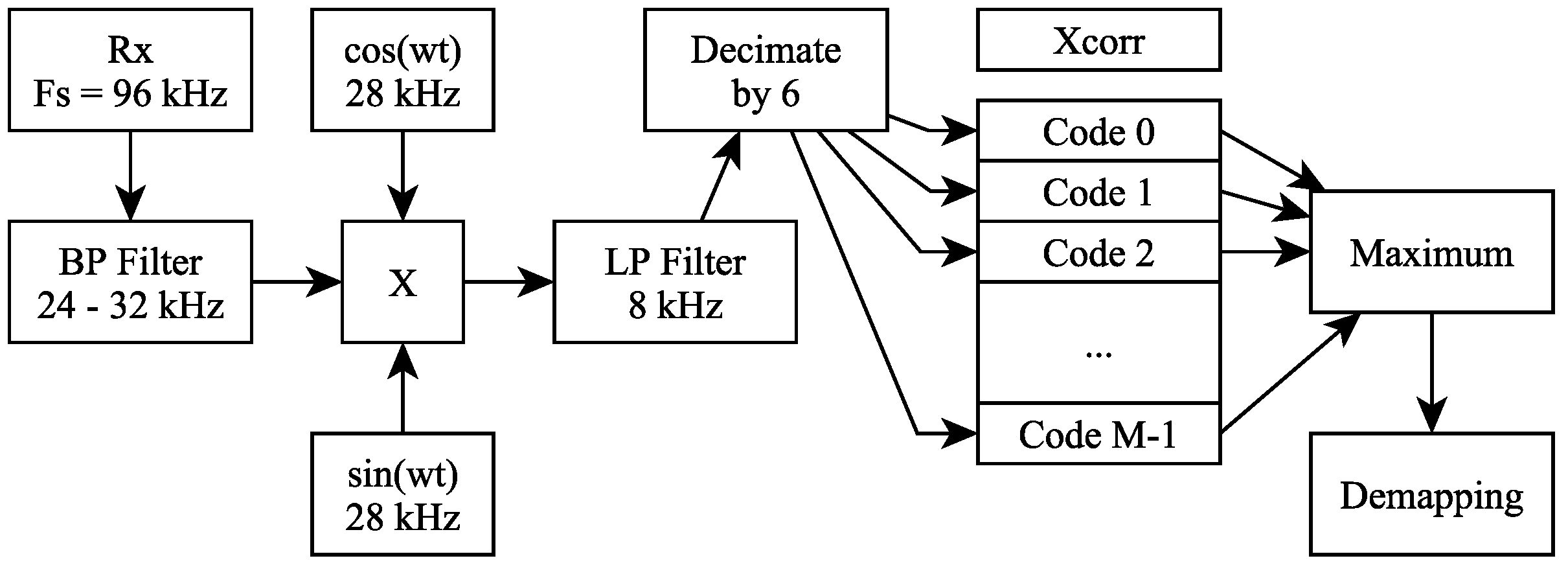
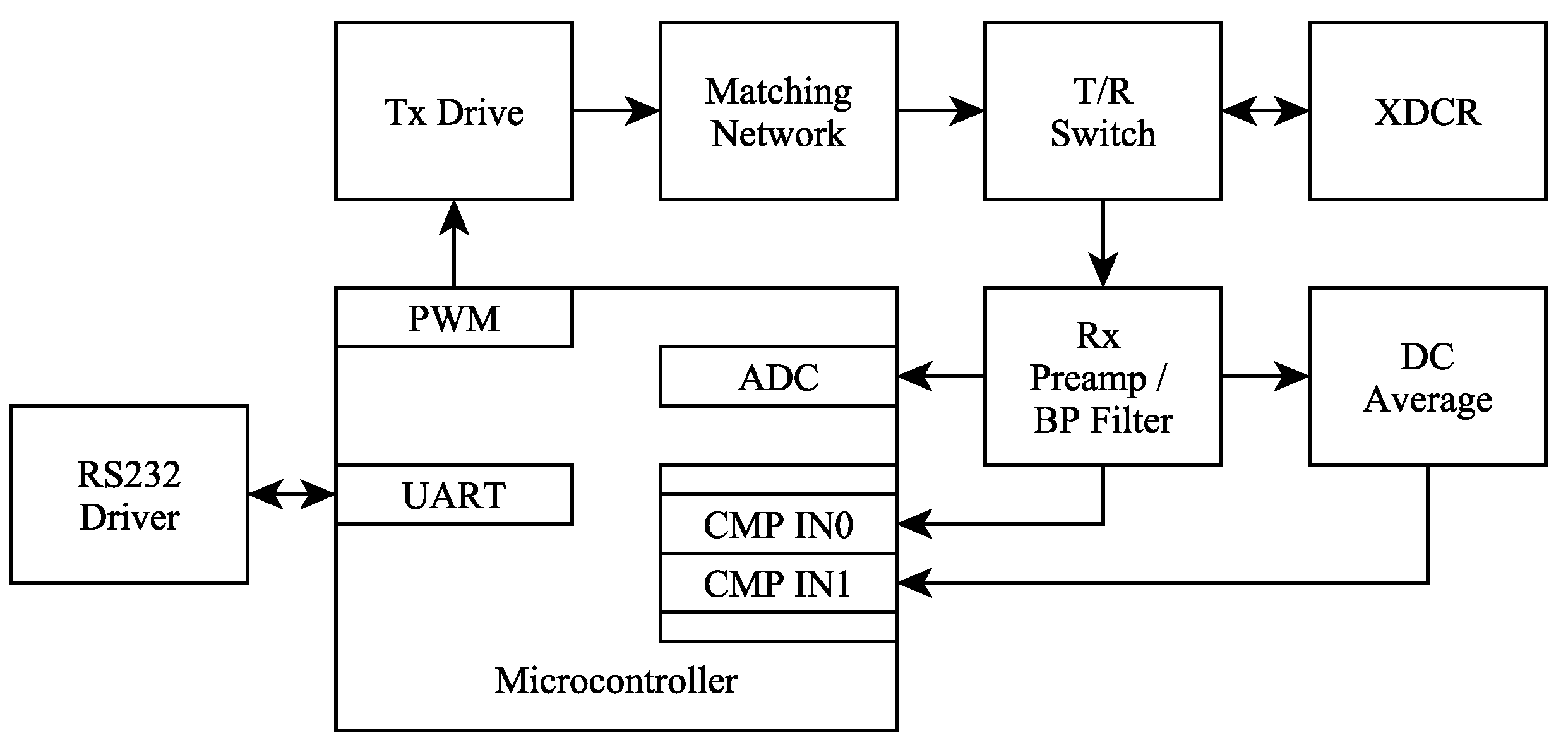
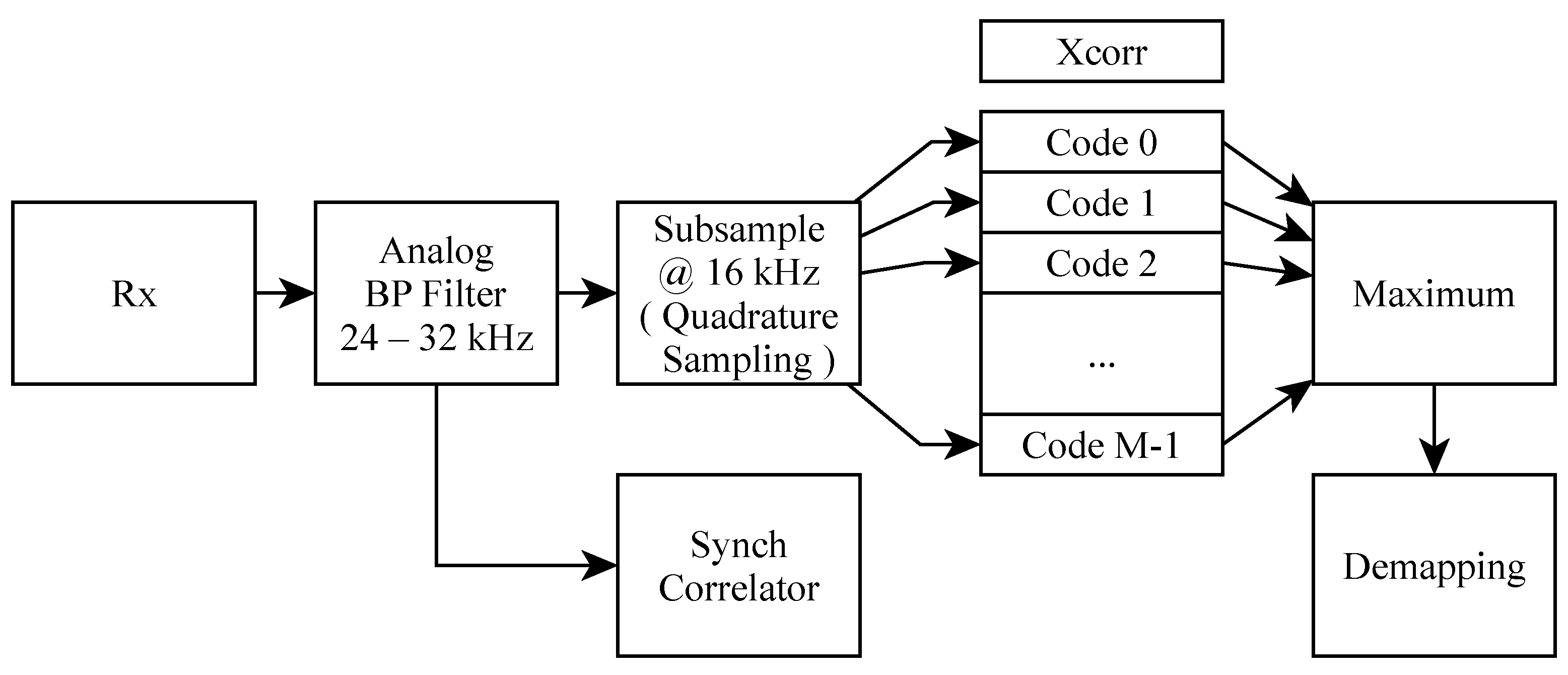
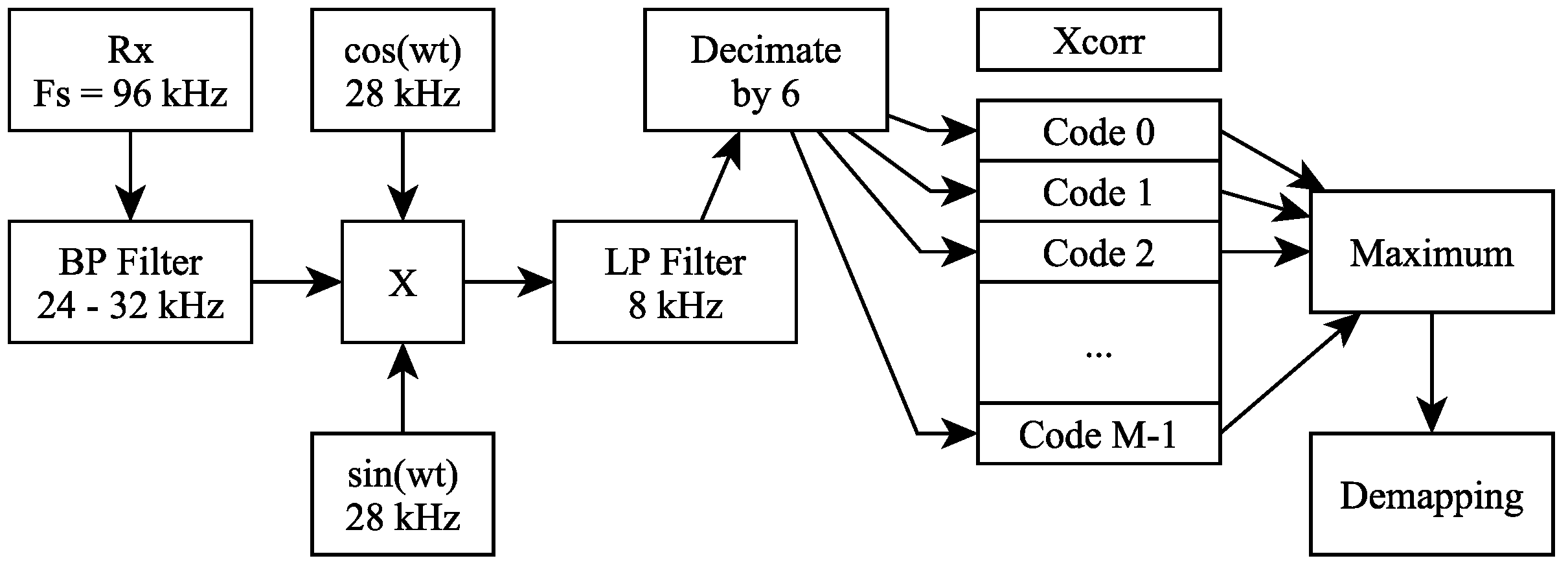
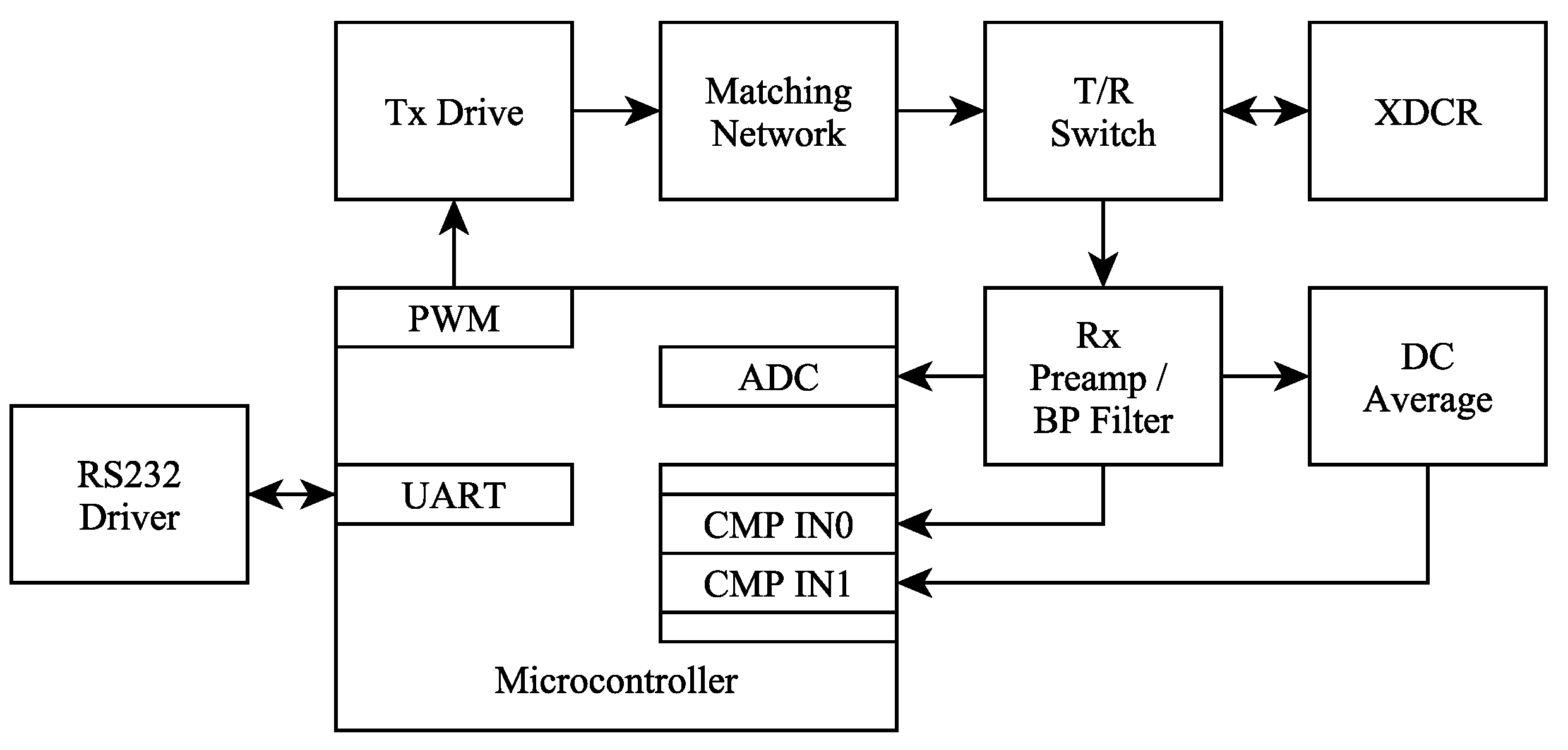
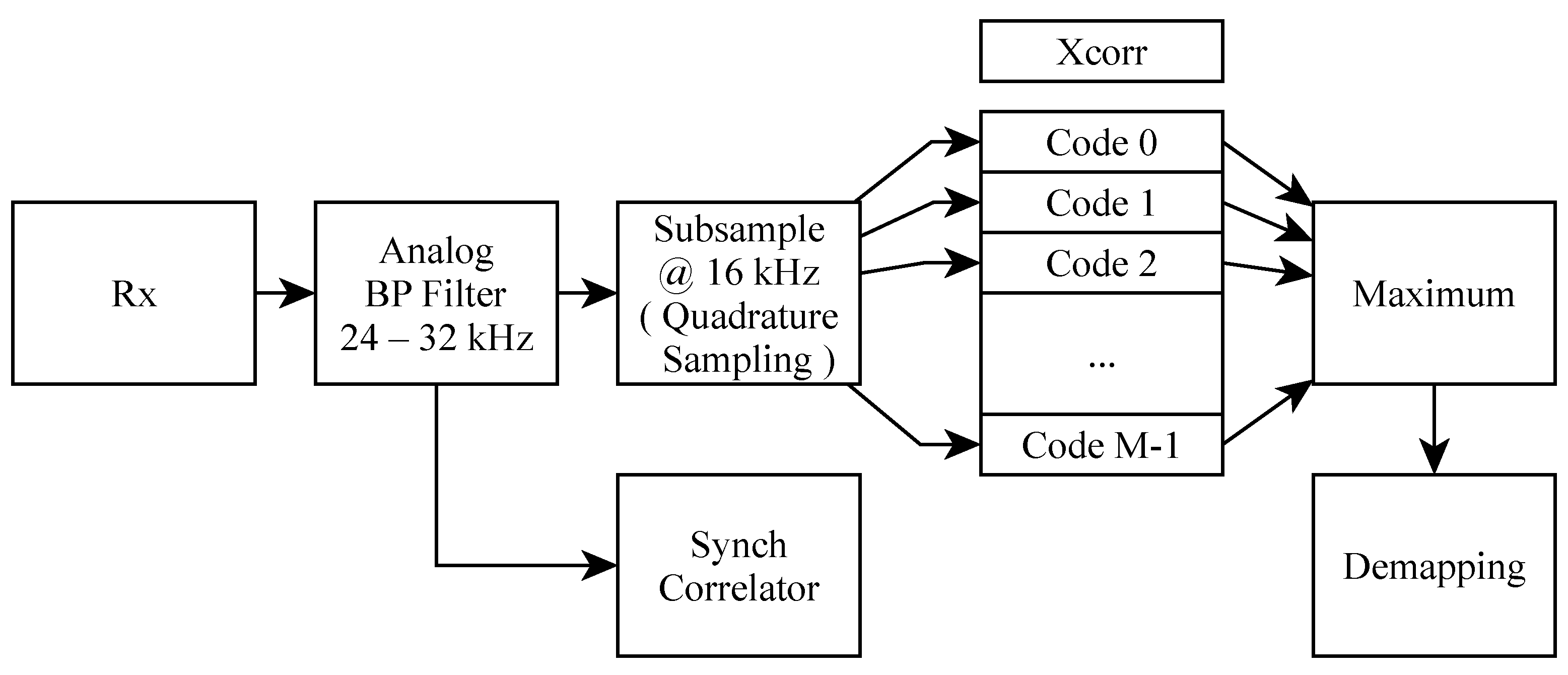
4.3. Hardware Receiver Structure
4.4. Frame Synchronisation
4.5. Data Demodulation
4.6. Simulated NMv3 Receiver Structure
4.7. Software NMv3 Receiver Structure
4.8. Power Usage Case Studies
- Receive Listening mode is primarily where the device is listening for the FS signal;
- Receive Demodulate mode starts as soon as the FS is detected and continues until the packet demodulation is complete, whereupon the modem returns to listening mode;
- Transmit mode occurs when the device is sending an acoustic signal and is the highest power consumption mode but only for a relatively low duty cycle;
- Sleep mode is where the device is not listening for signals or transmitting, and instead as much of the circuitry as possible has been put into either an off-state or else a very low power run state. Usually only the real-time clock is operational in order to wake up the device based on a set time schedule.
- Transponder for locating subsea assets. Spends 100% of its time in Receive Listening mode. Assuming a compact design running from four AA alkaline cells with a total energy capacity of 15 and a power consumption of , this equates to a lifespan of 1200 or 50 days;
- Sensor node transmitting and relaying data once an hour. Spends 59 min of the hour in Sleep mode, during the 1 min awake it transmits and receives 5 packets, where each packet is of duration. The remaining 55 is spent in Receive Listening mode. This equates to a total energy usage in a given hour of , equating to an average power consumption of . Assuming a slightly larger device than the transponder containing four C alkaline cells with a total energy capacity of 40 this equates to a lifespan of 16,666 h or 694 days.
5. Experimental Validation of NMv3
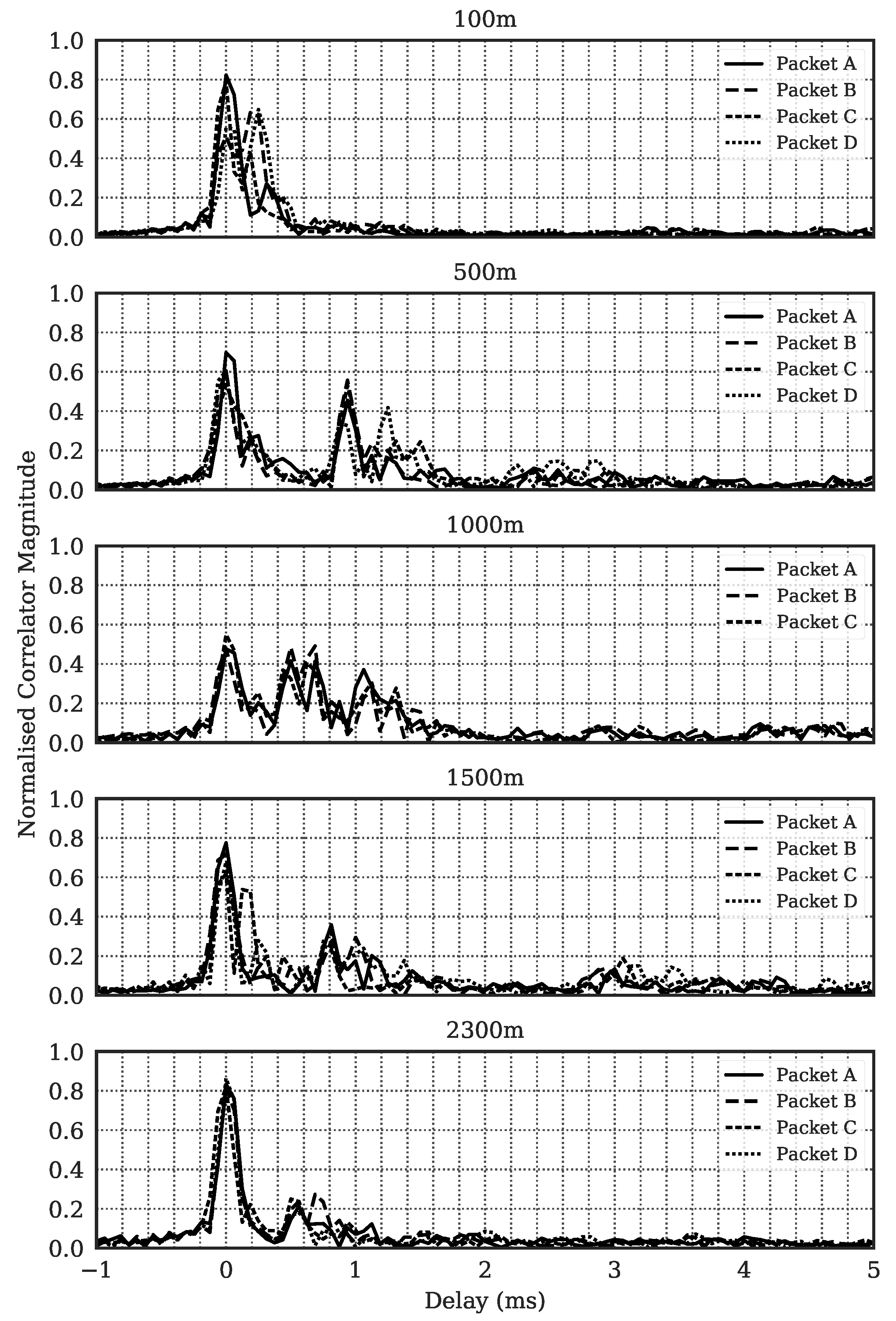
5.1. Range Testing in Loch Ness
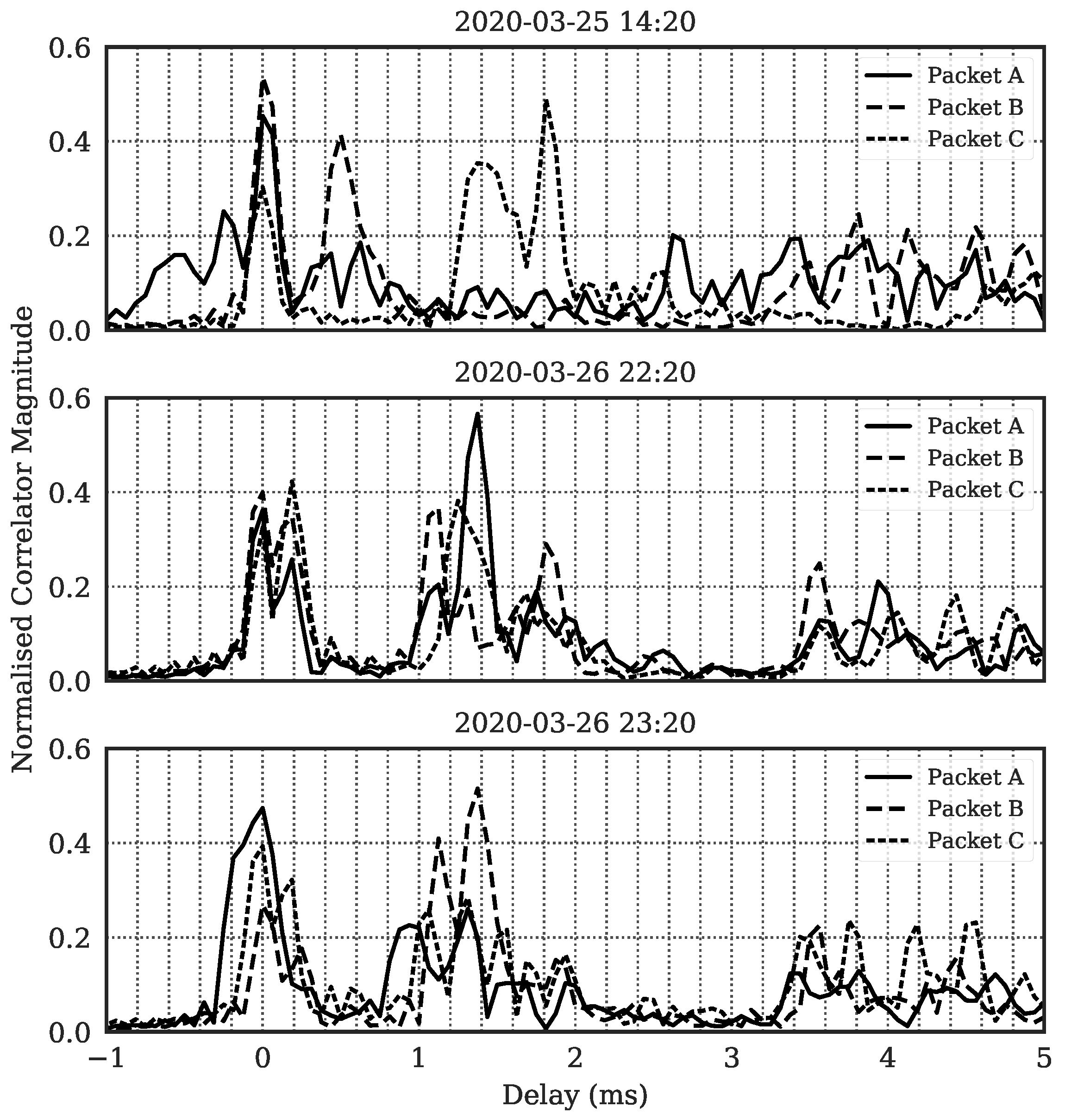
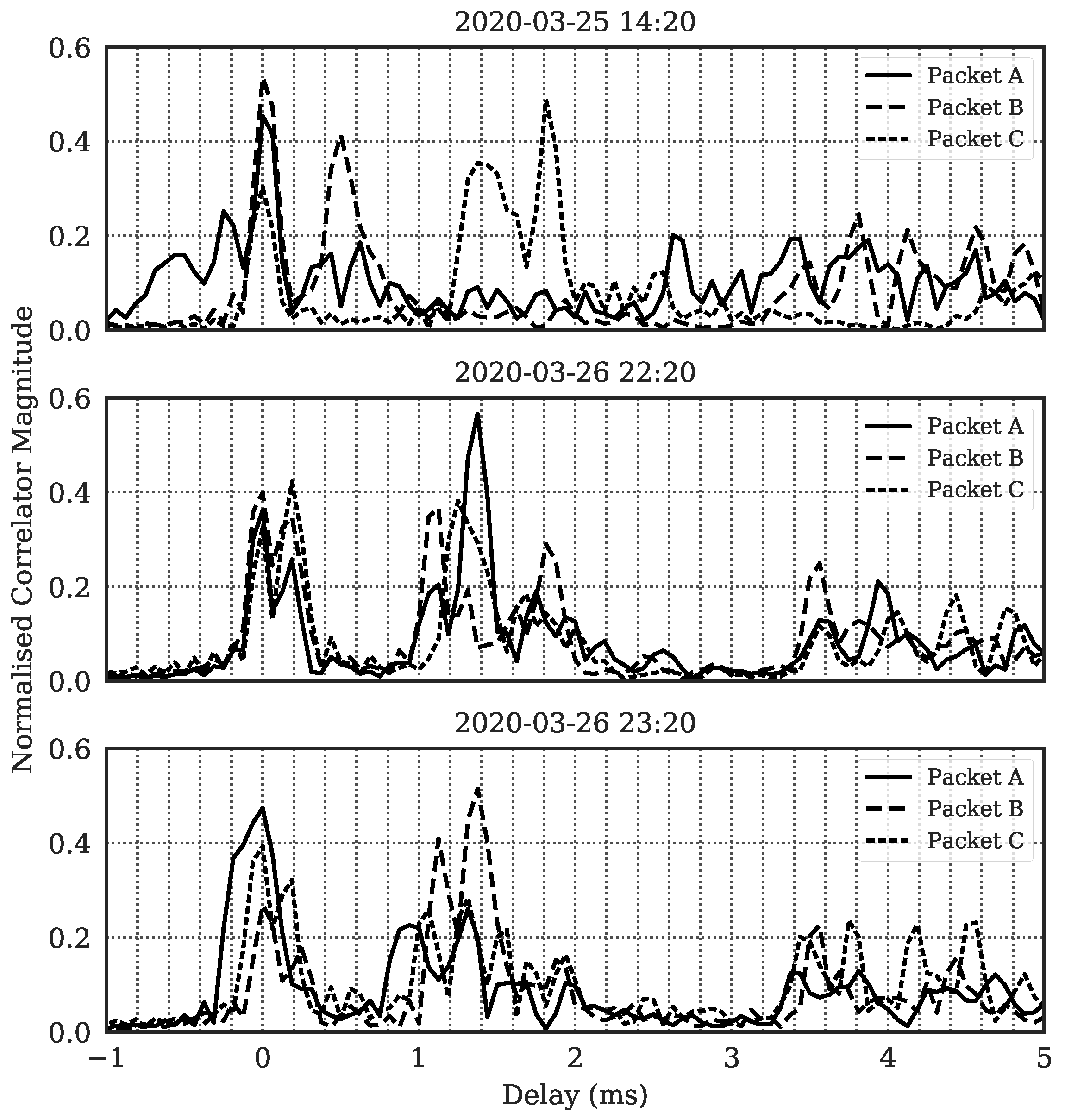
5.2. Range Testing in the North Sea
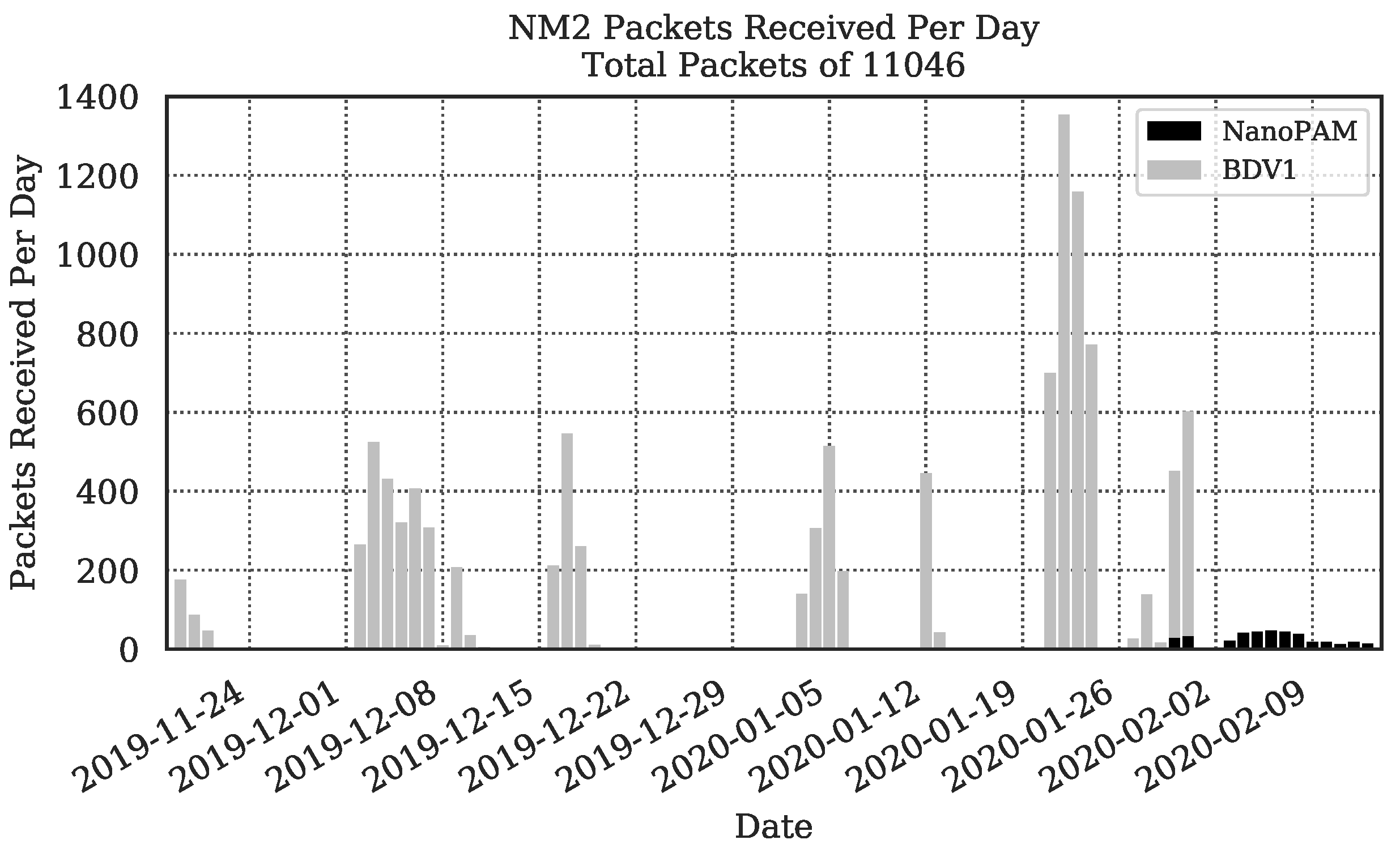
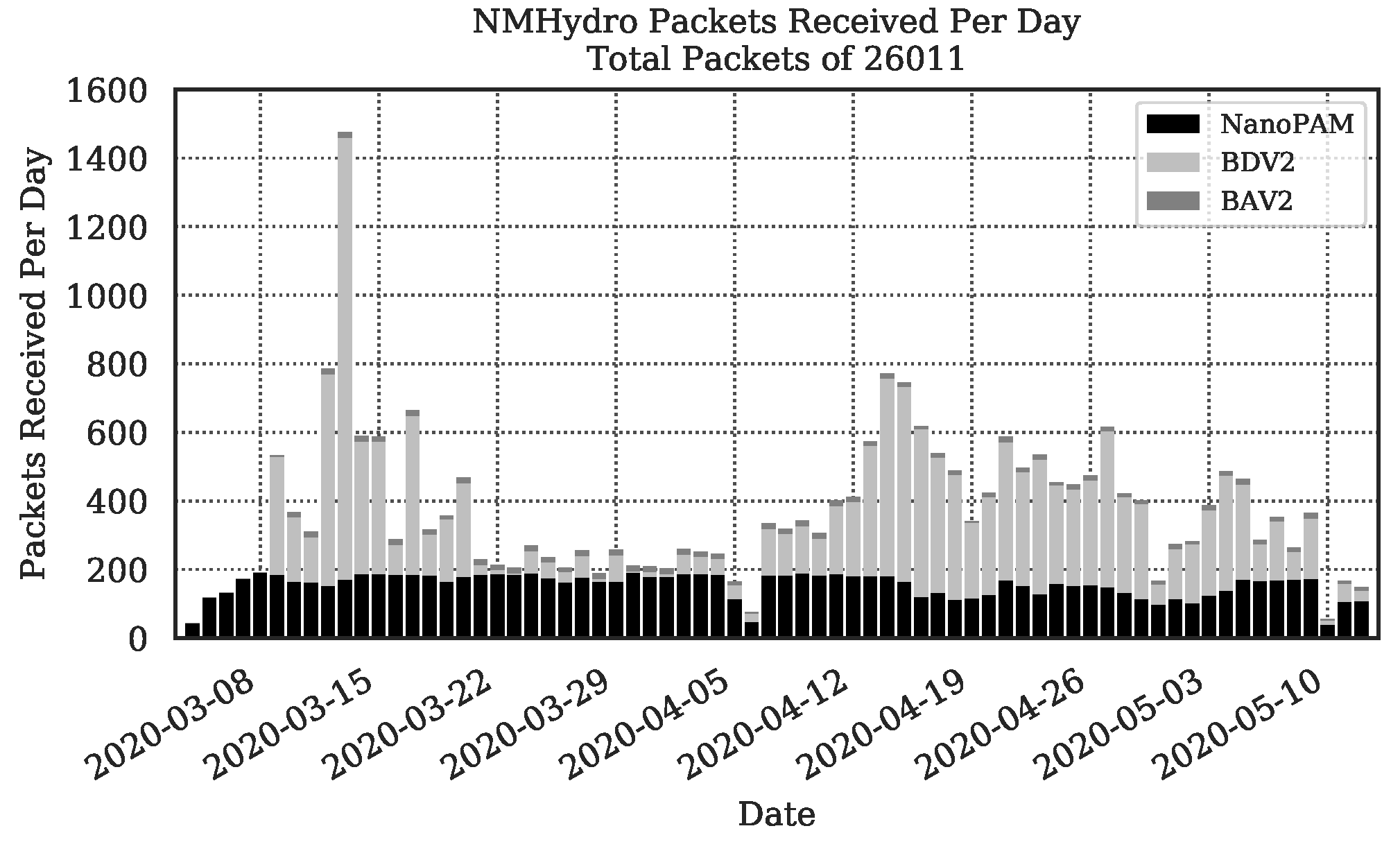
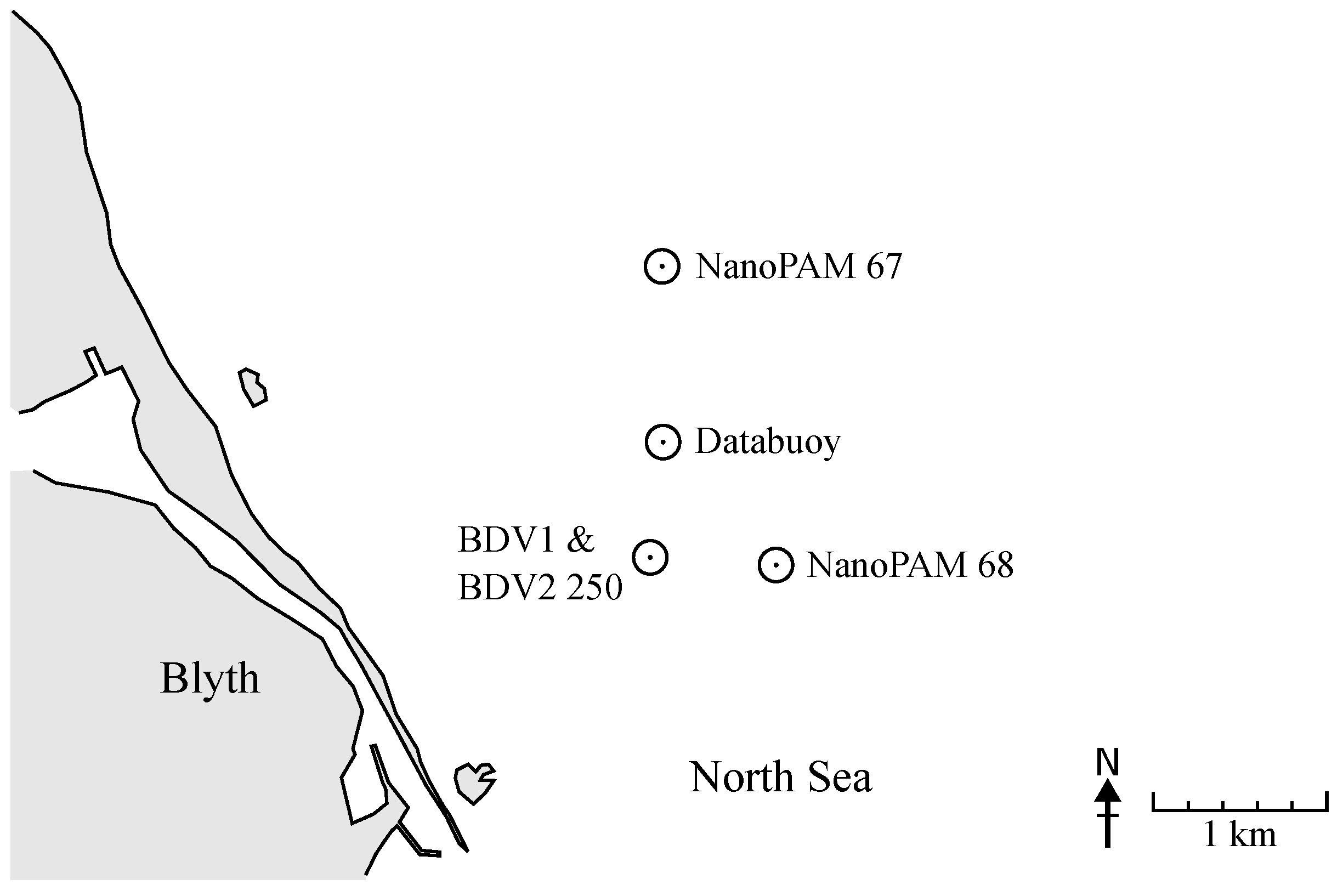
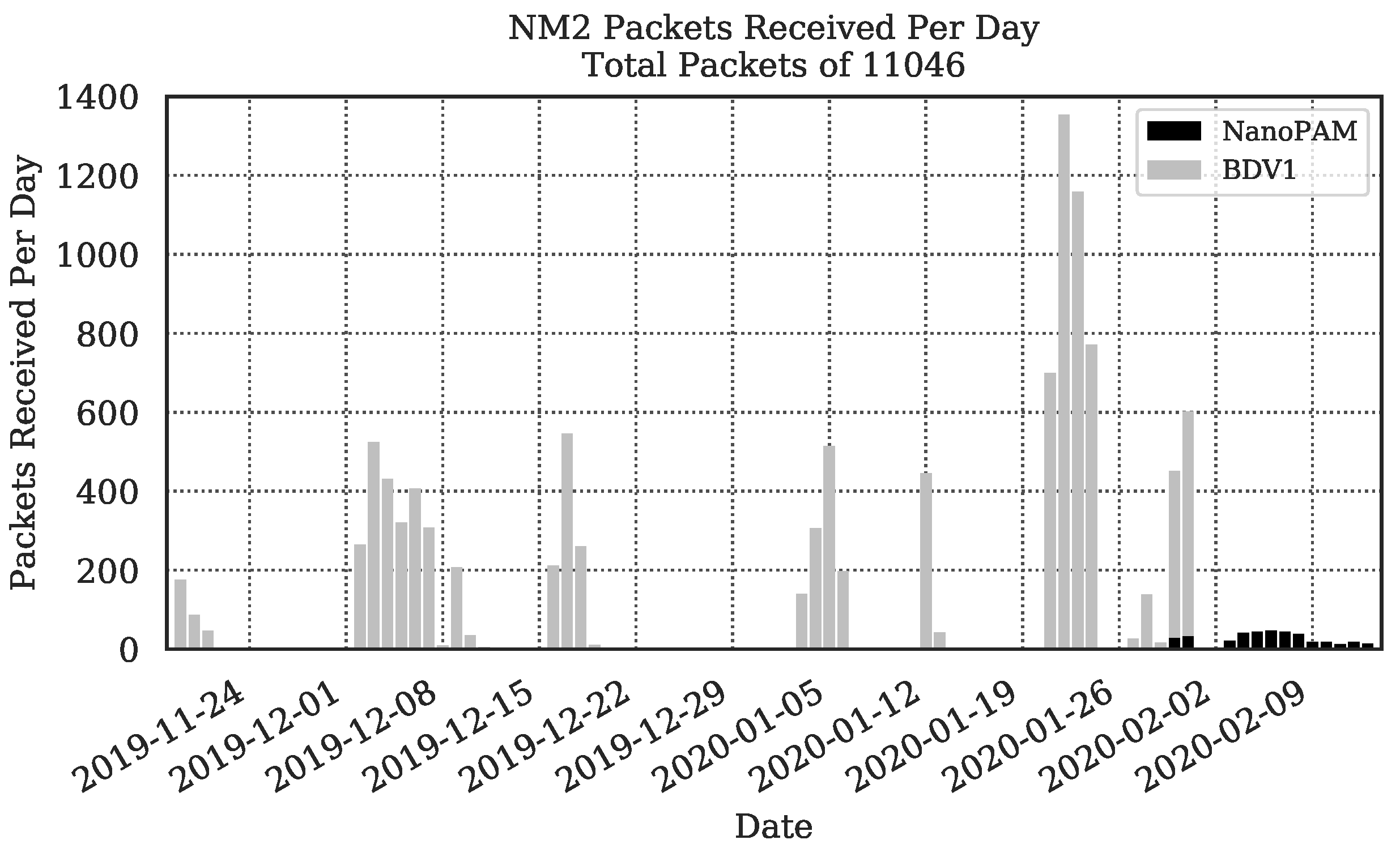
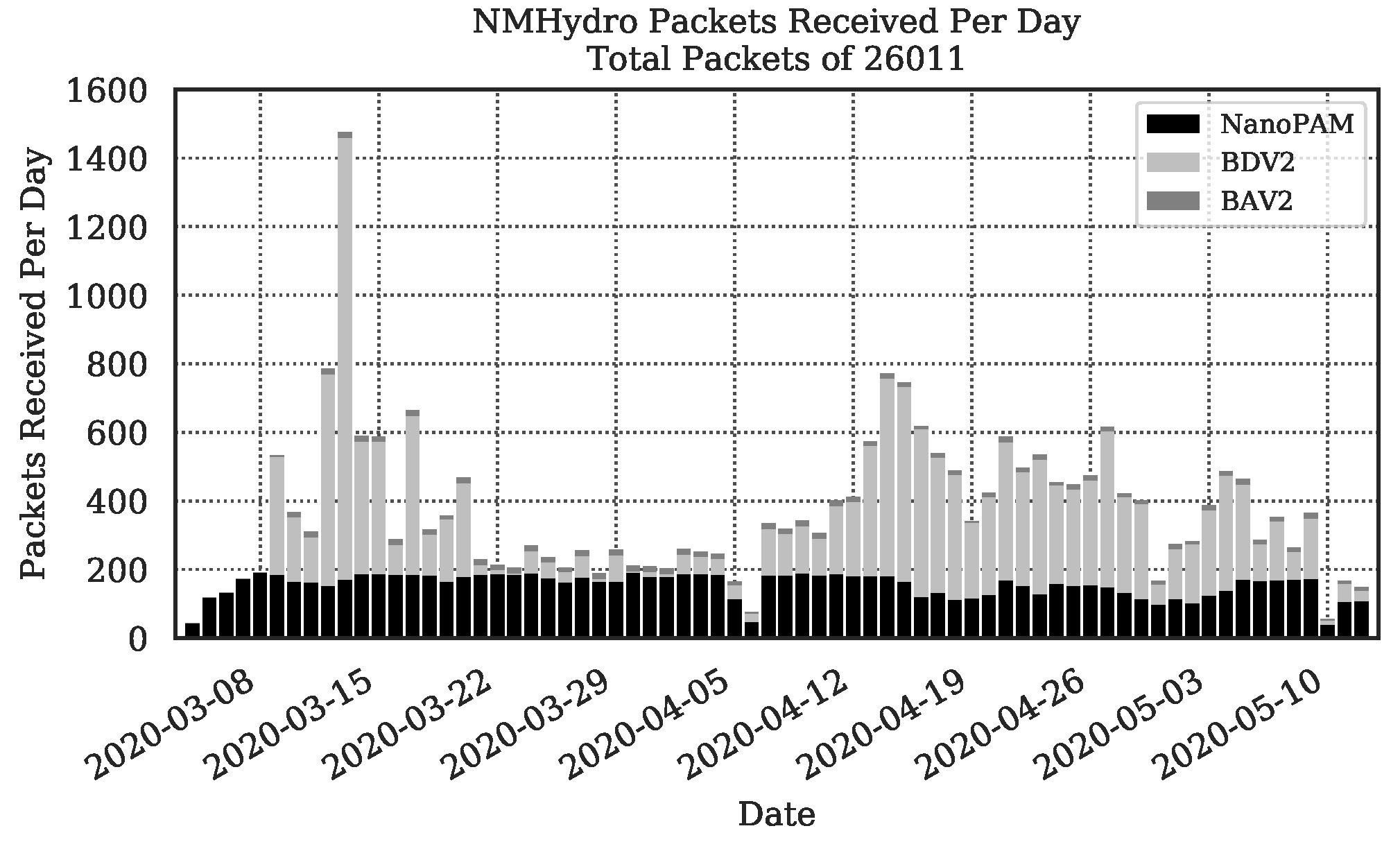
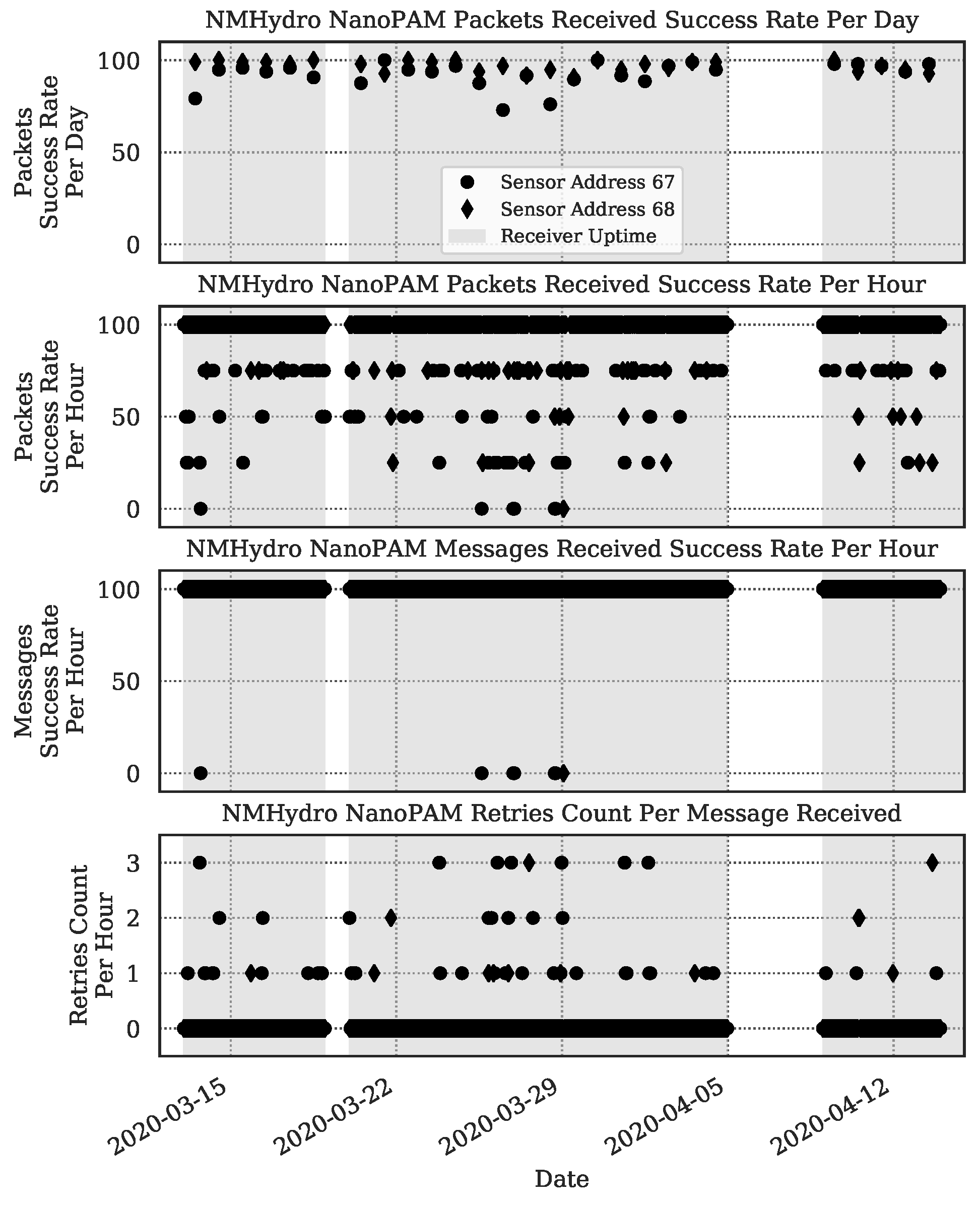
5.3. Long-Term Sensor Node Deployments in the North Sea
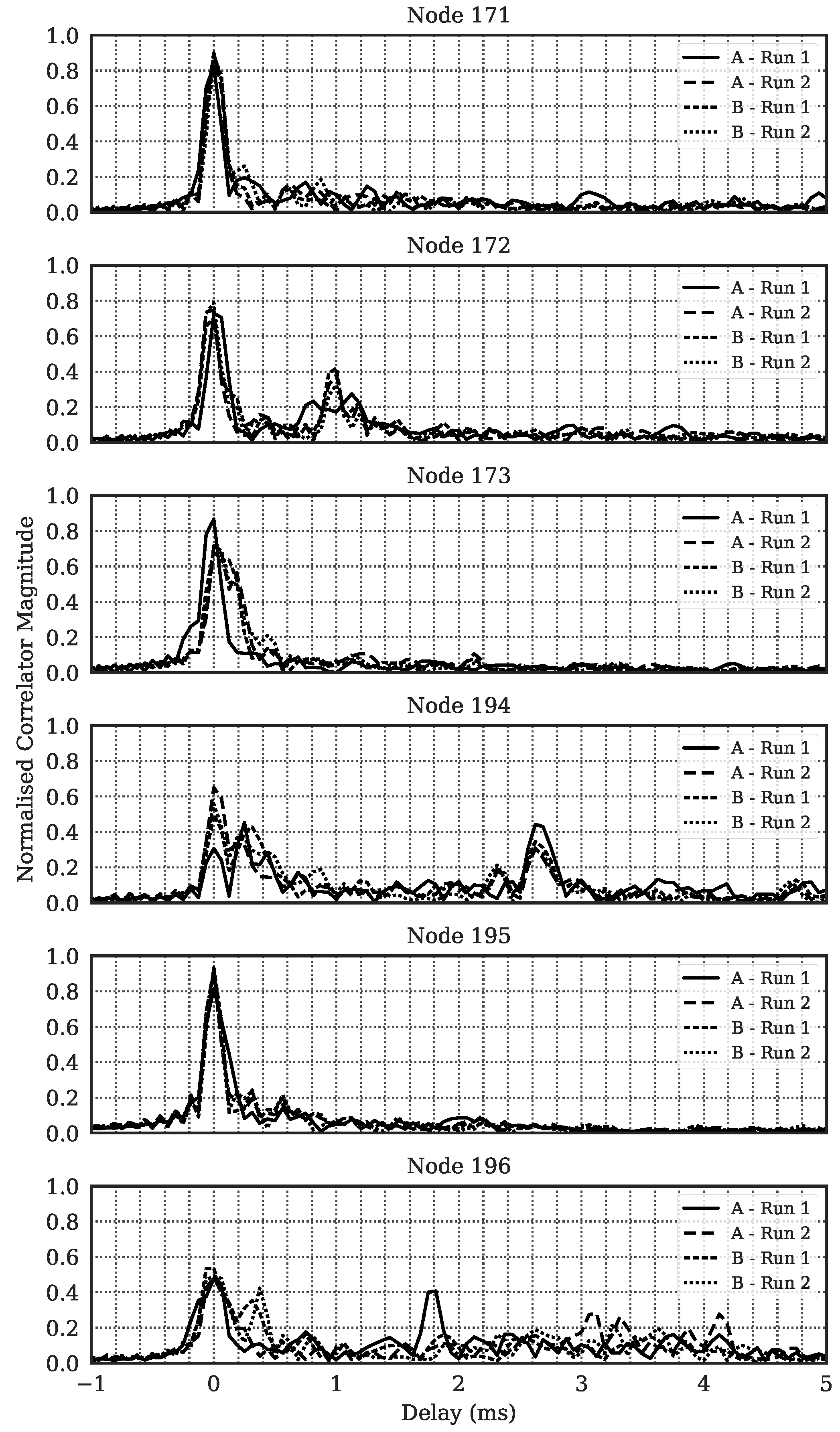
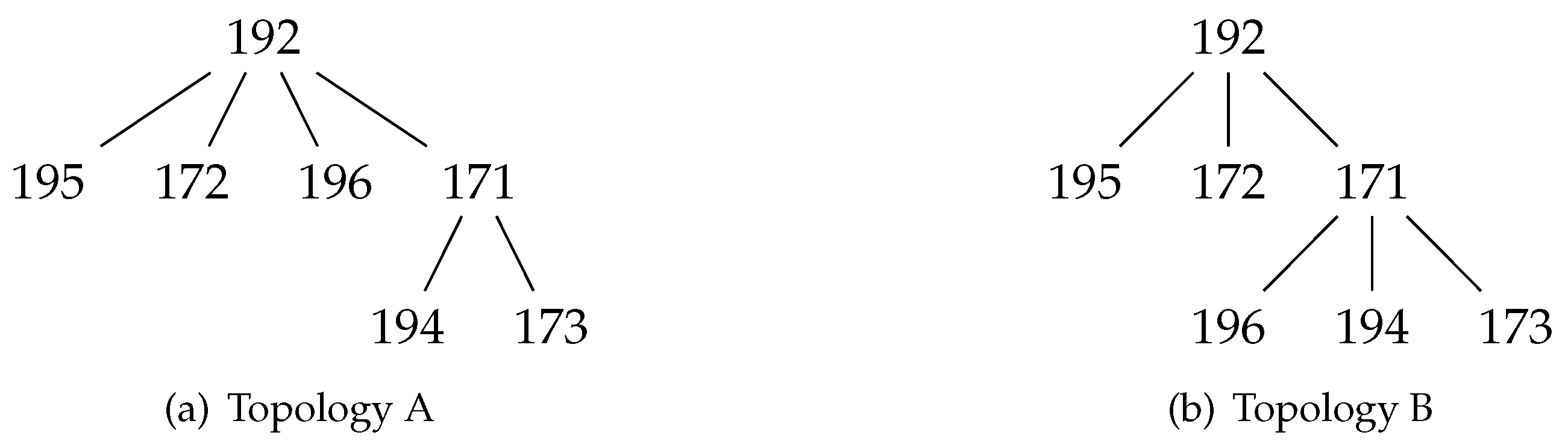
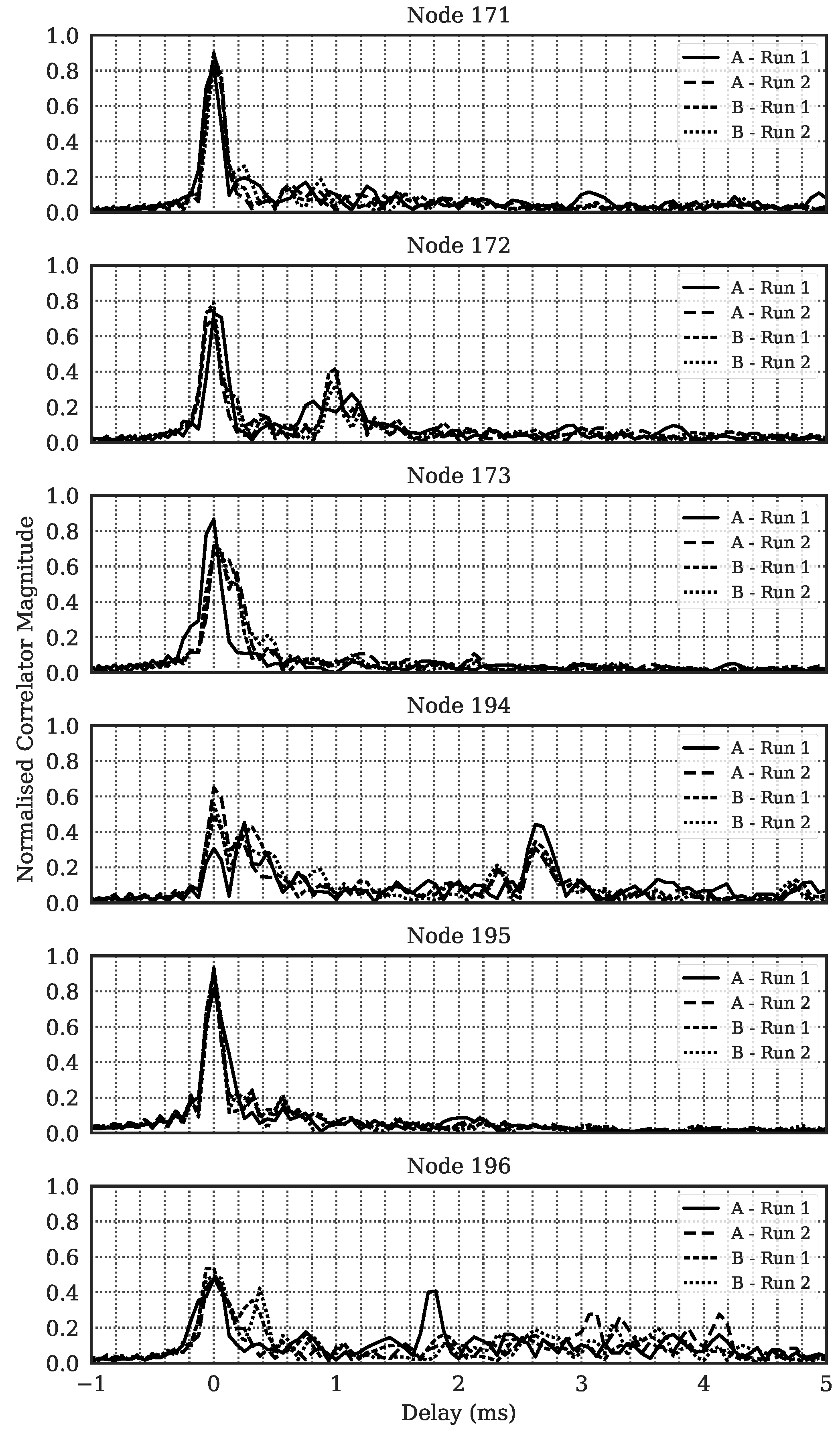
6. Network Experiments
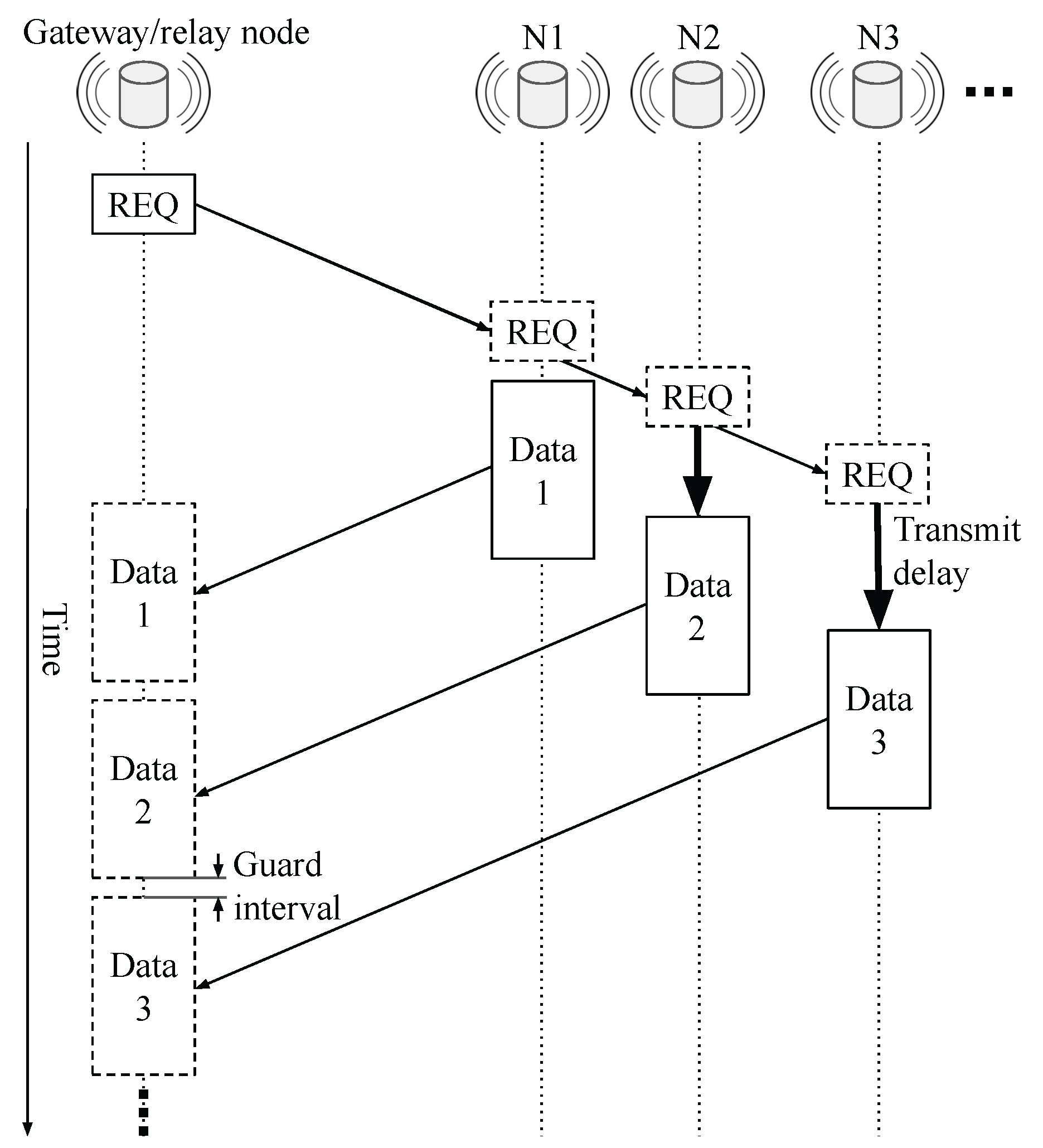
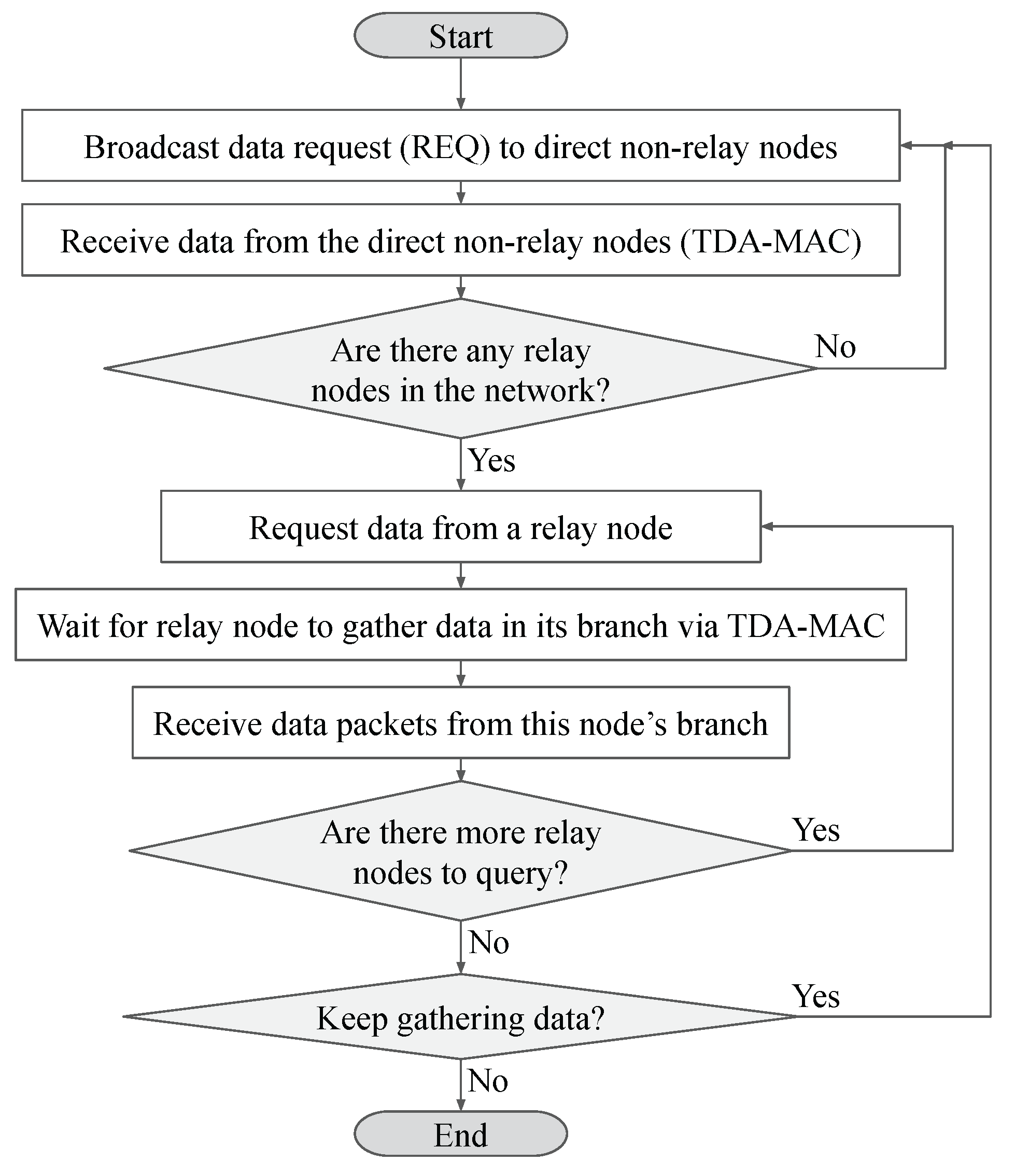
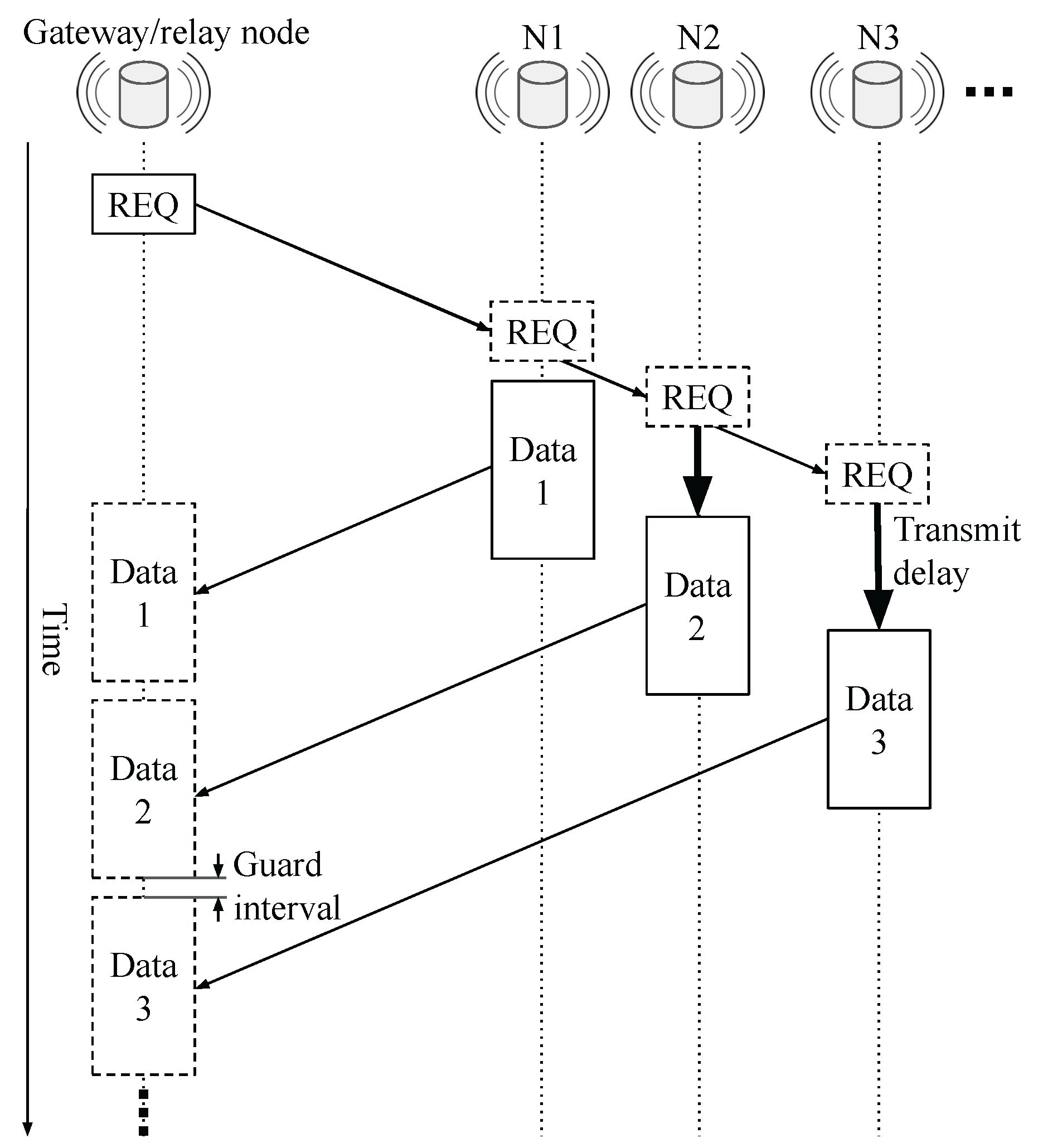
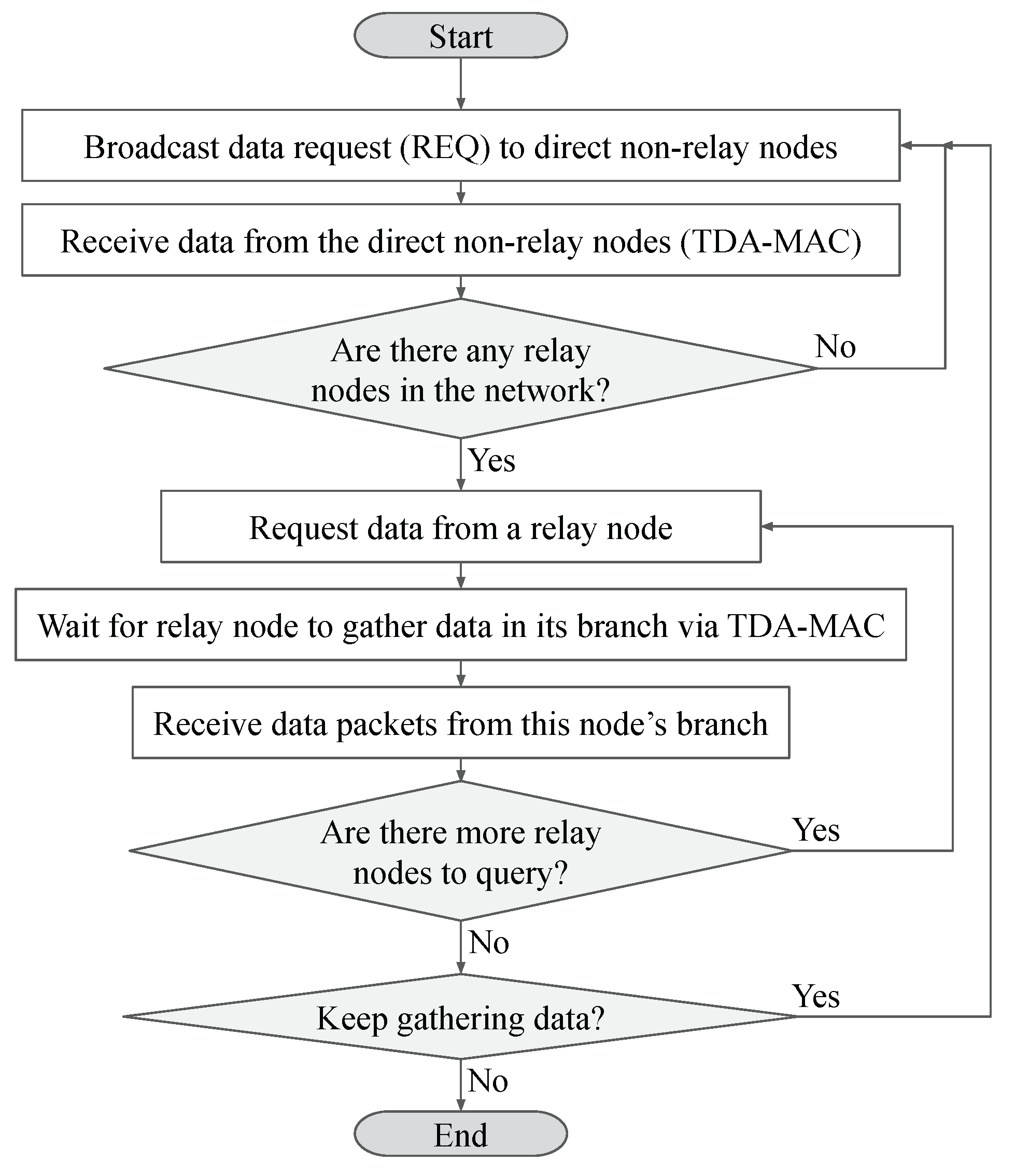
6.1. Centralised Networking Using Dual-Hop TDA-MAC
- The gateway node gathering data from directly connected sensor nodes;
- Every relay node gathering data packets within their respective network branch.
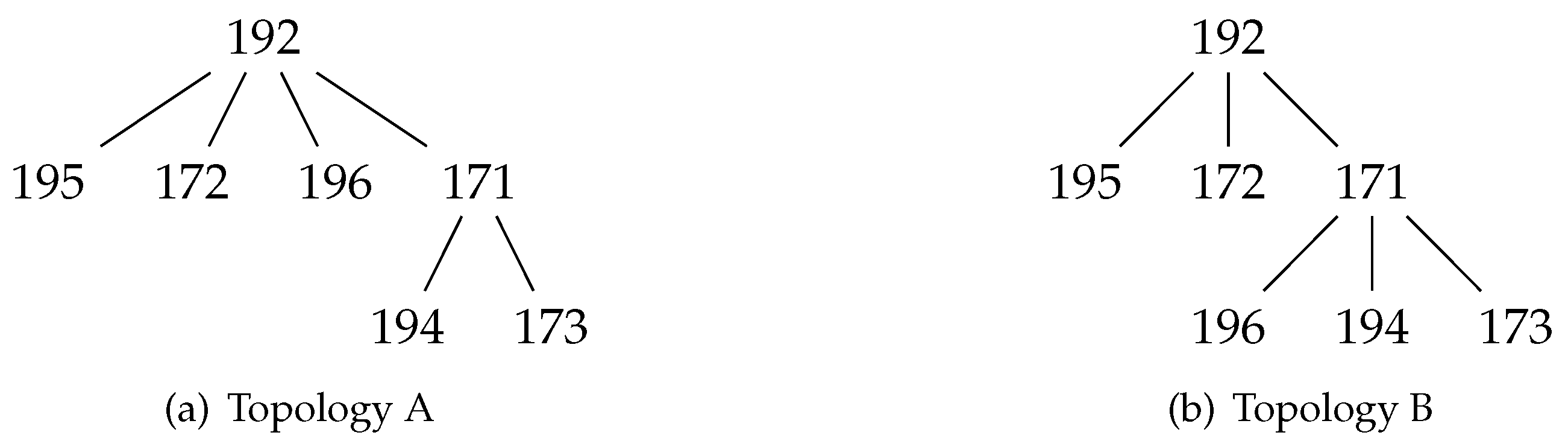
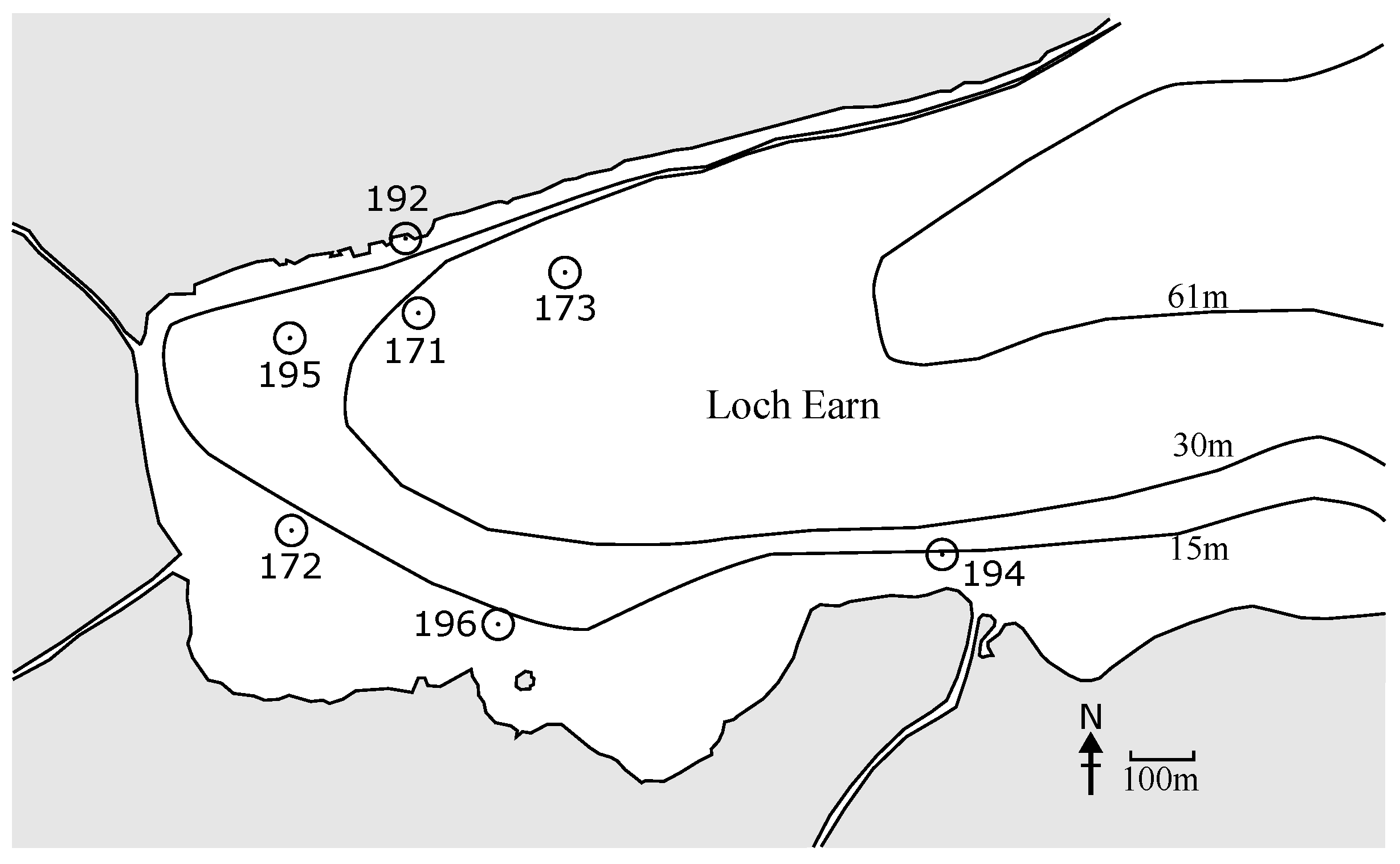
6.2. Experimental Setup
7. Discussion
8. Conclusions
9. Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUV | Automated Underwater Vehicle |
| AWGN | Additive White Gaussian Noise |
| BER | Bit Error Rate |
| BPSK | Binary Phase-shift Keying |
| BT | Bandwidth-Time Product |
| IoUT | Internet of Underwater Things |
| M-OCK | M-ary Orthogonal Code Keying |
| MOS | M-ary Orthogonal Signalling |
| PWM | Pulse Width Modulation |
| QPSK | Quadrature Phase-shift Keying |
| SWaP-C | Size Weight and Power and Cost |
| TDA-MAC | Transmit Delay Allocation Media Access Control |
| XDCR | Transducer |
References
- ecoSUB Robotics Ltd. Company Website. Available online: https://web.archive.org/web/20200716112625/https://www.ecosub.uk/ (accessed on 16 July 2020).
- European Commission. Submarine Cultures Perform Long-Term Robotic Exploration of Unconventional Environmental Niches. Available online: https://cordis.europa.eu/project/id/640967 (accessed on 16 July 2020).
- PMEC. Microfloat—A Simple Underwater Robot for Distributed Sensing in Coastal Waters. Available online: https://web.archive.org/web/20200716112347/https://www.pmec.us/research-projects/microfloat (accessed on 16 July 2020).
- Harrison, T.W.; Noe, J.; Joslin, J.; Mundon, T.R.; Crisp, C.; Murphy, P.; Polagye, B.L. Design and Performance Benchmarking of the μFloat: A Buoyancy-actuated Float for Swarm Sensing in Coastal Waterways. In Proceedings of the Ocean Sciences Meeting 2020, San Diego, CA, USA, 16–21 February 2020. [Google Scholar]
- Fenucci, D.; Munafo, A.; Phillips, A.B.; Neasham, J.; Gold, N.; Sitbon, J.; Vincent, I.; Sloane, T. Development of smart networks for navigation in dynamic underwater environments. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef] [Green Version]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater acoustic modems. IEEE Sens. J. 2015, 16, 4063–4071. [Google Scholar] [CrossRef]
- Sánchez, A.; Blanc, S.; Yuste, P.; Serrano, J. A low cost and high efficient acoustic modem for underwater sensor networks. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar]
- Sánchez, A.; Blanc, S.; Yuste, P.; Perles, A.; Serrano, J.J. An ultra-low power and flexible acoustic modem design to develop energy-efficient underwater sensor networks. Sensors 2012, 12, 6837–6856. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y.; Mourya, R.; Petillot, Y.R.; Gibney, T.; Dragone, M.; Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C.; et al. Robust TDA-MAC for practical underwater sensor network deployment: Lessons from USMART sea trials. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018; p. 11. [Google Scholar]
- Mandić, F.; Mišković, N.; Lončar, I. Underwater Acoustic Source Seeking Using Time-Difference-of-Arrival Measurements. IEEE J. Ocean. Eng. 2019, 45, 759–771. [Google Scholar] [CrossRef]
- Babic, A.; Vasiljevic, G.; Miskovic, N. Vehicle-in-the-loop framework for testing long-term autonomy in a heterogeneous marine robot swarm. IEEE Robot. Autom. Lett. 2020, 5, 4439–4446. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Diamant, R. Scalable Adaptive Networking for the Internet of Underwater Things. IEEE Internet Things J. 2020, 7, 10023–10037. [Google Scholar] [CrossRef]
- Richardson, W.J.; Greene, C.R., Jr.; Malme, C.I.; Thomson, D.H. Marine Mammals and Noise; Academic Press: Cambridge, MA, USA, 1995. [Google Scholar]
- OSPAR Commission. Overview of the impacts of anthropogenic underwater sound in the marine environment. Report 2009, 441, 134. [Google Scholar]
- Lucke, K.; Siebert, U.; Lepper, P.A.; Blanchet, M.A. Temporary shift in masked hearing thresholds in a harbor porpoise (Phocoena phocoena) after exposure to seismic airgun stimuli. J. Acoust. Soc. Am. 2009, 125, 4060–4070. [Google Scholar] [CrossRef] [PubMed]
- Kastelein, R.; De Haan, D.; Vaughan, N.; Staal, C.; Schooneman, N. The influence of three acoustic alarms on the behaviour of harbour porpoises (Phocoena phocoena) in a floating pen. Mar. Environ. Res. 2001, 52, 351–371. [Google Scholar] [CrossRef]
- Kastelein, R.A.; Hoek, L.; Gransier, R.; Rambags, M.; Claeys, N. Effect of level, duration, and inter-pulse interval of 1–2 kHz sonar signal exposures on harbor porpoise hearing. J. Acoust. Soc. Am. 2014, 136, 412–422. [Google Scholar] [CrossRef] [PubMed]
- Kastelein, R.; Verboom, W.; Muijsers, M.; Jennings, N.; Van der Heul, S. The influence of acoustic emissions for underwater data transmission on the behaviour of harbour porpoises (Phocoena phocoena) in a floating pen. Mar. Environ. Res. 2005, 59, 287–307. [Google Scholar] [CrossRef] [PubMed]
- Kastelein, R.A.; van der Heul, S.; Verboom, W.C.; Triesscheijn, R.J.; Jennings, N.V. The influence of underwater data transmission sounds on the displacement behaviour of captive harbour seals (Phoca vitulina). Mar. Environ. Res. 2006, 61, 19–39. [Google Scholar] [CrossRef] [PubMed]
- Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C. Spread-Spectrum Techniques for Bio-Friendly Underwater Acoustic Communications. IEEE Access 2018, 6, 4506–4520. [Google Scholar] [CrossRef]
- Sherlock, B. Spread-Spectrum Techniques for Environmentally-Friendly Underwater Acoustic Communications. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 2018. [Google Scholar]
- Sherlock, B.; Tsimenidis, C.C.; Neasham, J.A. Signal and receiver design for low-power acoustic communications using M-ary orthogonal code keying. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–10. [Google Scholar]
- Neasham, J.A.; Goodfellow, G.; Sharphouse, R. Development of the Seatrac miniature acoustic modem and USBL positioning units for subsea robotics and diver applications. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar]
- Kastelein, R.; Rippe, H.; Vaughan, N.; Schooneman, N.; Verboom, W.; Haan, D.D. The effects of acoustic alarms on the behavior of harbor porpoises (Phocoena phocoena) in a floating pen. Mar. Mammal Sci. 2000, 16, 46–64. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Digital Communications; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- John R. Barry, J.R.; Lee, E.A.; Messerschmitt, D.G. Digital Communication, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Reed, I.S.; Solomon, G. Polynomial codes over certain finite fields. J. Soc. Ind. Appl. Math. 1960, 8, 300–304. [Google Scholar] [CrossRef]
- Lowes, G.J.; Neasham, J.A.; Burnett, R.; Tsimenidis, C.C. Low Energy, Passive Acoustic Sensing for Wireless Underwater Monitoring Networks. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–9. [Google Scholar]
- Lowes, G.J.; Neasham, J.; Burnett, R.; Sherlock, B.; Tsimenidis, C. Passive Acoustic Detection of Vessel Activity by Low-Energy Wireless Sensors. J. Mar. Sci. Eng. 2022, 10, 248. [Google Scholar] [CrossRef]
- Neasham, J.; Lowes, G. Impact of United Kingdom lockdown on subsea noise from vessel propulsion. J. Acoust. Soc. Am. 2021, 149, A28. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.; Zakharov, Y.V. TDA-MAC: TDMA without clock synchronization in underwater acoustic networks. IEEE Access 2018, 6, 1091–1108. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y. Routing Strategies for Dual-Hop TDA-MAC: Trade-Off Between Network Throughput and Reliability. In Proceedings of the UACE’19, Hersonissos, Greece, 30 June–5 July 2019; pp. 303–310. [Google Scholar]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y. Dual-Hop TDA-MAC and Routing for Underwater Acoustic Sensor Networks. IEEE J. Ocean Eng. 2019, 44, 865–880. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Operating Frequency Band | 24 to 28 |
| Data Rate | 40 bit/ |
| Payload | Fixed 7 bytes |
| Transmit Power SL (W) | 168 dB re 1 μ @ 1 ( ) |
| Receiver Power Consumption | 10 |
| Operating Range | Up to 2 |
| Range Resolution | 10 |
| Interface | RS232 at 9600 baud |
| LFM (UP/DN) | Payload Length | CMD | Address (Src/Dest) | Packet Type |
|---|---|---|---|---|
| UP | 0 | 0 | Dest | Ping Request |
| DN | 0 | 1 | Src | Ack / Ping Response |
| UP | 0 | 2 | Dest | Test Message Request |
| UP | 0 | 3 | Dest | VBatt Request |
| UP | 1–63 | 0 | Dest | Unicast Message |
| UP | 1–63 | 1 | Src | Broadcast Message |
| UP | 1–63 | 2 | Dest | Unicast Message With Ack Request |
| UP | 1–63 | 3 | Dest | Echo Message Request |
| Operating Mode | Measured Current @ 5 V | Power Consumption |
|---|---|---|
| Receive: Listening | 2.5 | 12.5 |
| Receive: Demodulate | 5 | 25 |
| Transmit | 300 | 1.5 |
| Sleep | 240 μ | 1.2 |
| Node Addresses | |||||||
|---|---|---|---|---|---|---|---|
| Topology | Frames | 171 | 172 | 173 | 194 | 195 | 196 |
| A–Run 1 | 173 | 171 | 169 | 169 | 173 | 169 | 103 |
| 99% | 98% | 98% | 100% | 98% | 60% | ||
| A–Run 2 | 14 | 14 | 14 | 14 | 7 | 14 | 6 |
| 100% | 100% | 100% | 50% | 100% | 43% | ||
| B–Run 1 | 28 | 28 | 27 | 27 | 26 | 28 | 6 |
| 100% | 96% | 96% | 93% | 100% | 21% | ||
| B–Run 2 | 96 | 94 | 96 | 96 | 78 | 96 | 95 |
| 98% | 100% | 100% | 81% | 100% | 99% | ||
| REQ Packets Received | Data Packets Received | |||||
|---|---|---|---|---|---|---|
| Topology | Frames | Broadcast | Unicast | N173 | N194 | N196 |
| A–Run 1 | 173 | 173 | 173 | 171 | 173 | - |
| 100% | 100% | 99% | 100% | |||
| A–Run 2 | 14 | 14 | 14 | 14 | 17 | - |
| 100% | 100% | 100% | 50% | |||
| B–Run 1 | 28 | 28 | 28 | 27 | 26 | 6 |
| 100% | 100% | 96% | 93% | 21% | ||
| B–Run 2 | 96 | 94 | 96 | 96 | 78 | 95 |
| 98% | 100% | 100% | 81% | 99% | ||
| NMv2 | NMv3 | |
|---|---|---|
| Operating Frequency Band | 24 to 28 | 24 to 32 |
| Data Rate | 40 bit/s raw, 30 bit/s net | 640 bit/s raw, 470 bit/s net |
| Payload | Fixed 7 bytes | Variable 2 bytes to 64 bytes |
| Payload FEC | None (CRC only) | RS 16 parity bytes |
| Transmit Power SL (W) | 168 dB re 1 μ @ 1 ( ) | 168 dB re 1 μ @ 1 ( ) |
| Receiver Listening Power Consumption | 10 | |
| Operating Range | Up to 2 | Up to |
| Range Resolution | 10 | 5 |
| Interface | RS232 at 9600 baud | RS232 at 9600 baud |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sherlock, B.; Morozs, N.; Neasham, J.; Mitchell, P. Ultra-Low-Cost and Ultra-Low-Power, Miniature Acoustic Modems Using Multipath Tolerant Spread-Spectrum Techniques. Electronics 2022, 11, 1446. https://doi.org/10.3390/electronics11091446
Sherlock B, Morozs N, Neasham J, Mitchell P. Ultra-Low-Cost and Ultra-Low-Power, Miniature Acoustic Modems Using Multipath Tolerant Spread-Spectrum Techniques. Electronics. 2022; 11(9):1446. https://doi.org/10.3390/electronics11091446
Chicago/Turabian StyleSherlock, Benjamin, Nils Morozs, Jeffrey Neasham, and Paul Mitchell. 2022. "Ultra-Low-Cost and Ultra-Low-Power, Miniature Acoustic Modems Using Multipath Tolerant Spread-Spectrum Techniques" Electronics 11, no. 9: 1446. https://doi.org/10.3390/electronics11091446
APA StyleSherlock, B., Morozs, N., Neasham, J., & Mitchell, P. (2022). Ultra-Low-Cost and Ultra-Low-Power, Miniature Acoustic Modems Using Multipath Tolerant Spread-Spectrum Techniques. Electronics, 11(9), 1446. https://doi.org/10.3390/electronics11091446