
High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum

Abstract
:1. Introduction
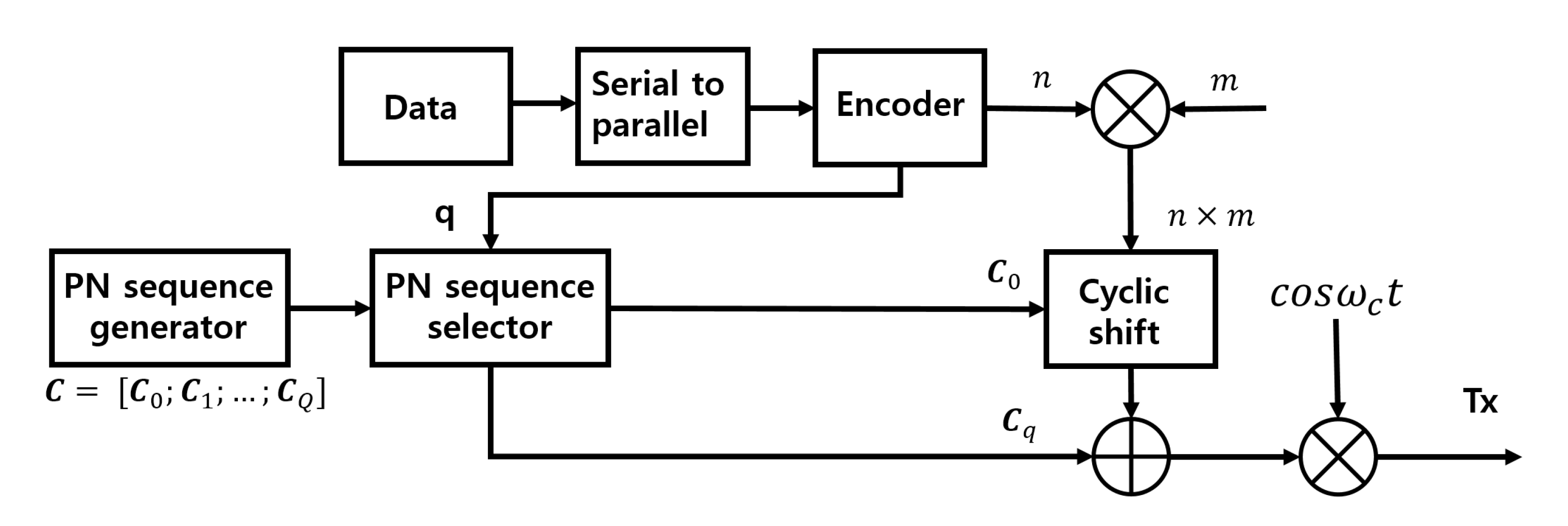
2. Proposed Method
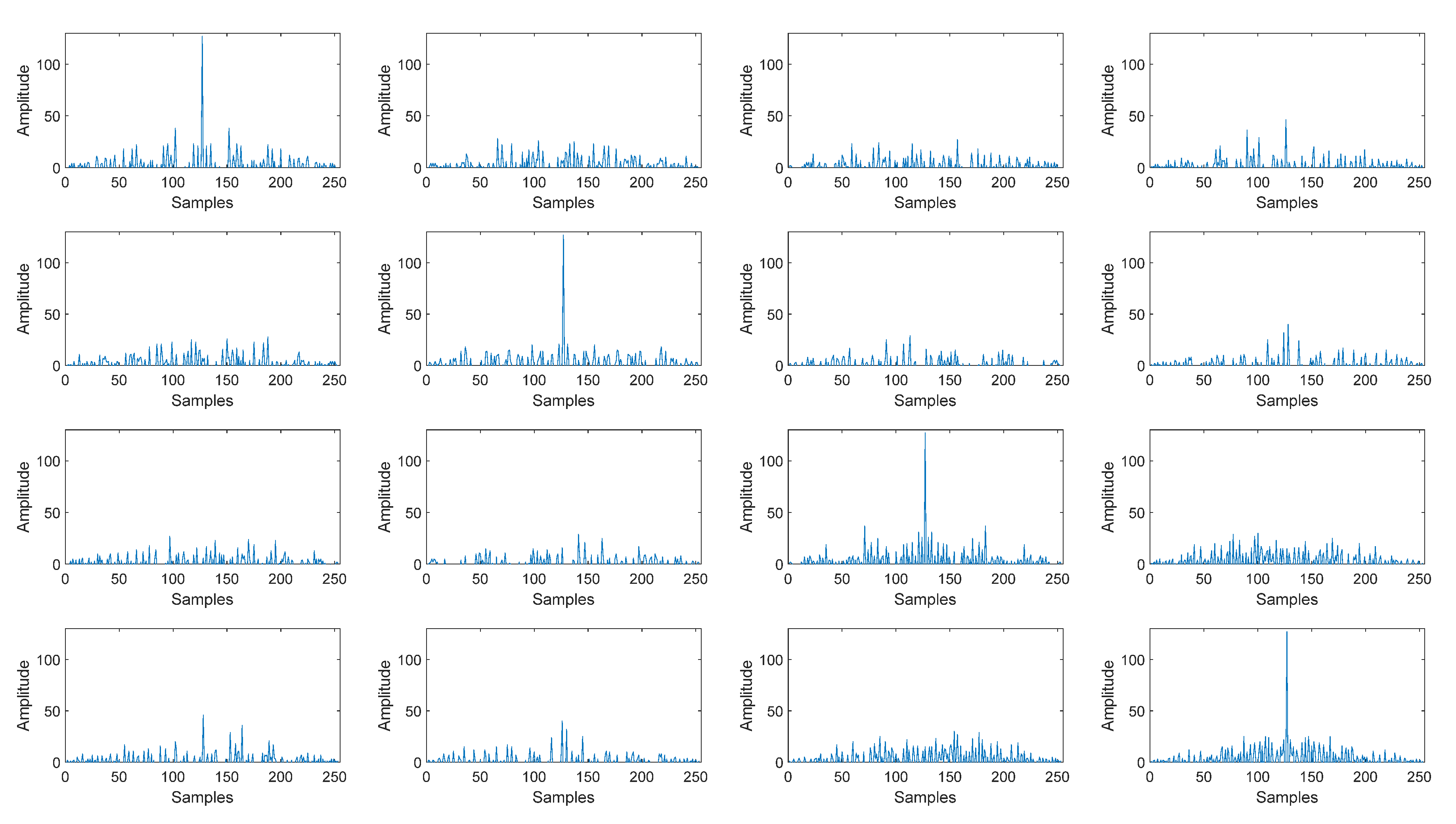
2.1. Principle of MCSS
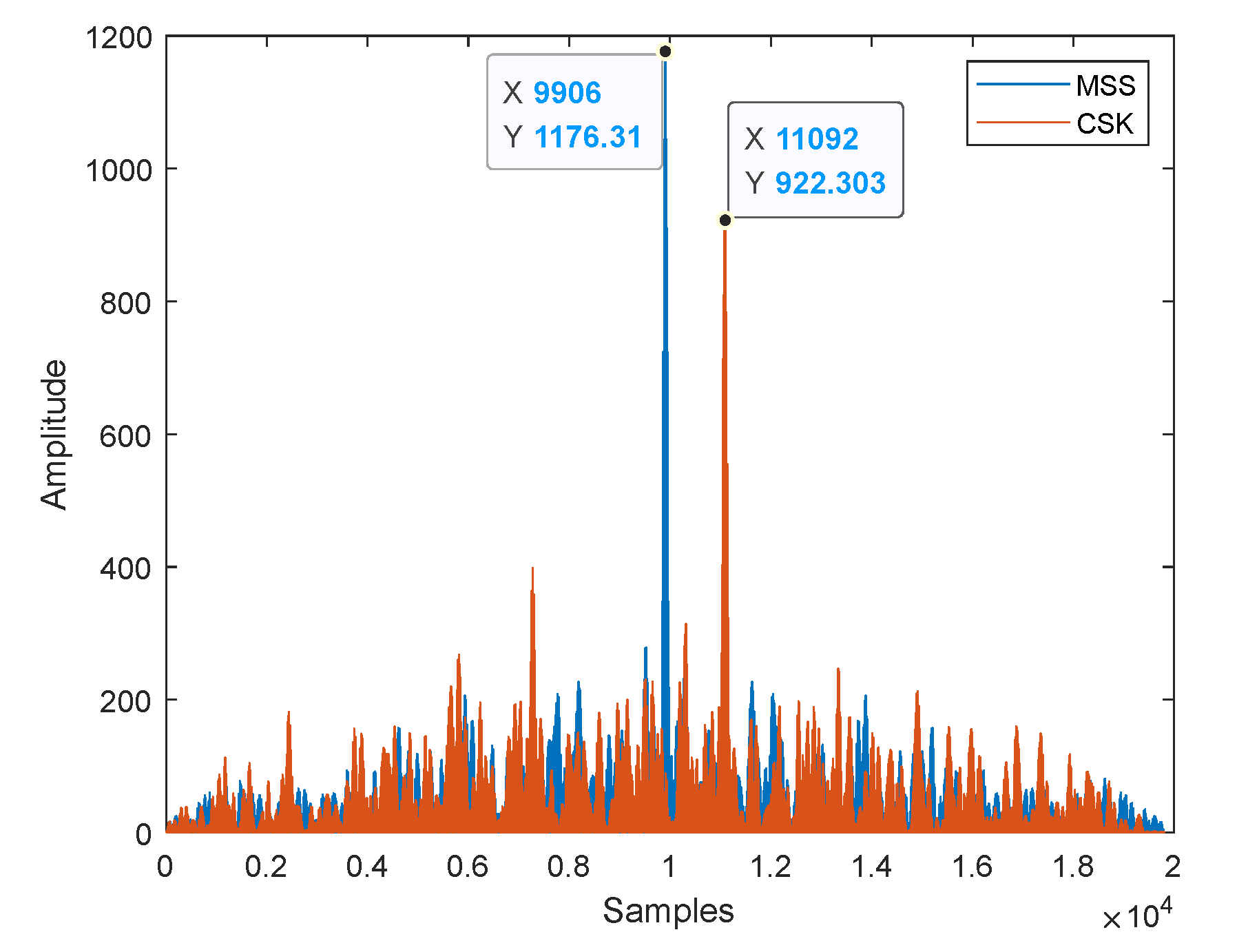
2.2. Estimation of the Approximate Doppler Shift Based on Two Peaks
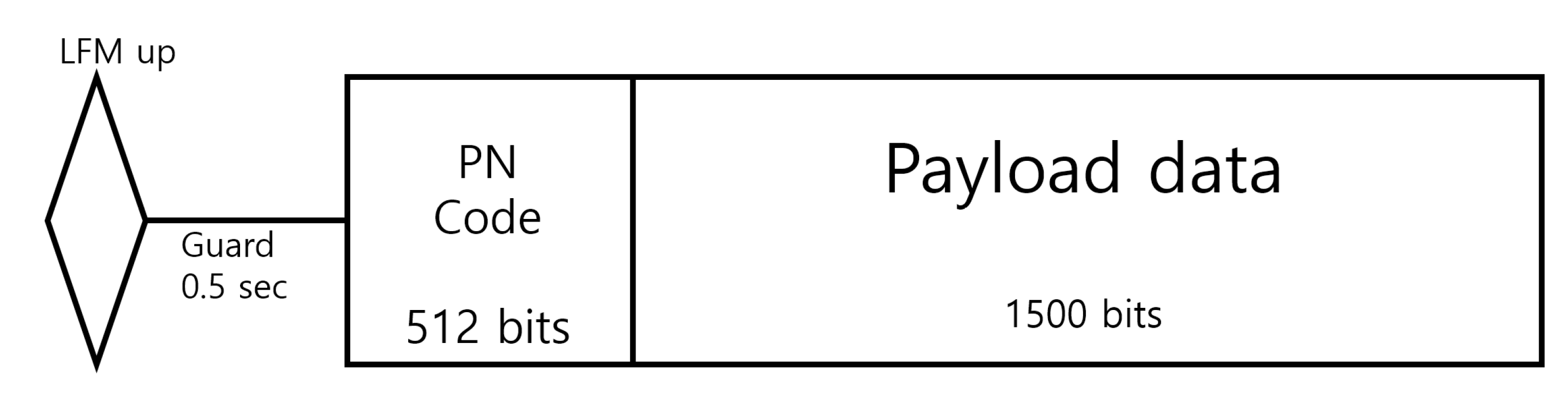
2.3. Symbol Synchronization and Doppler estimation with MSS
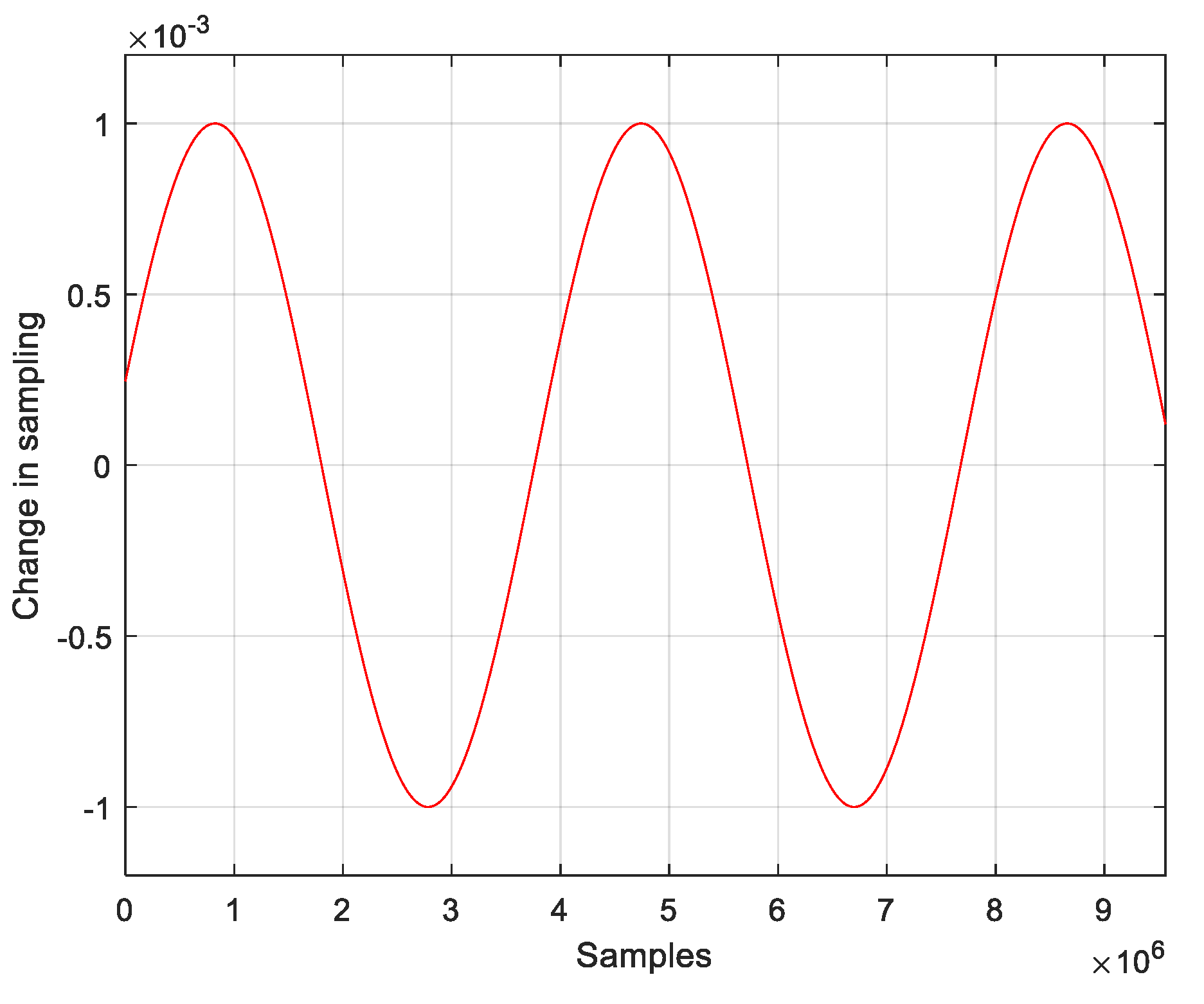
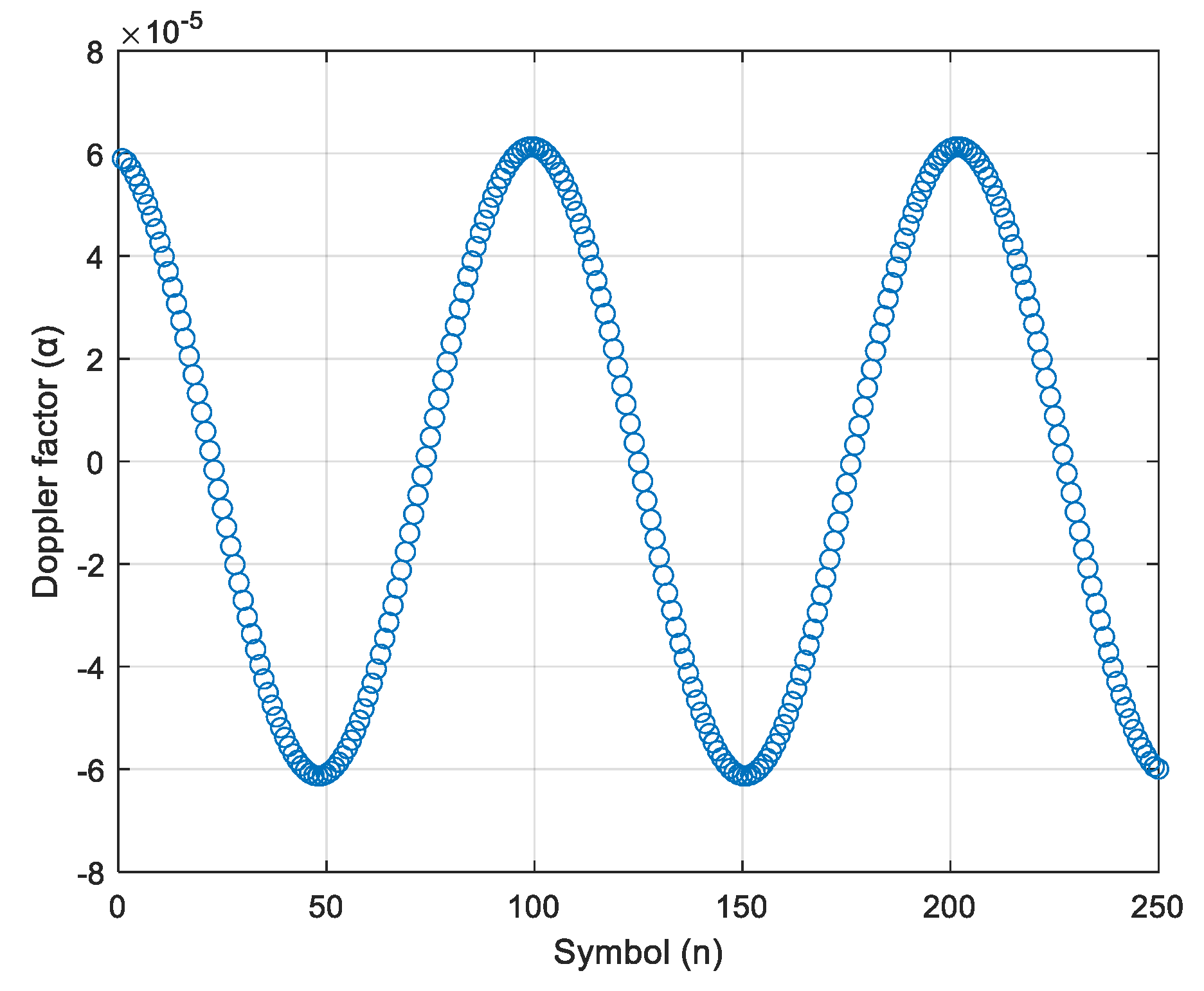
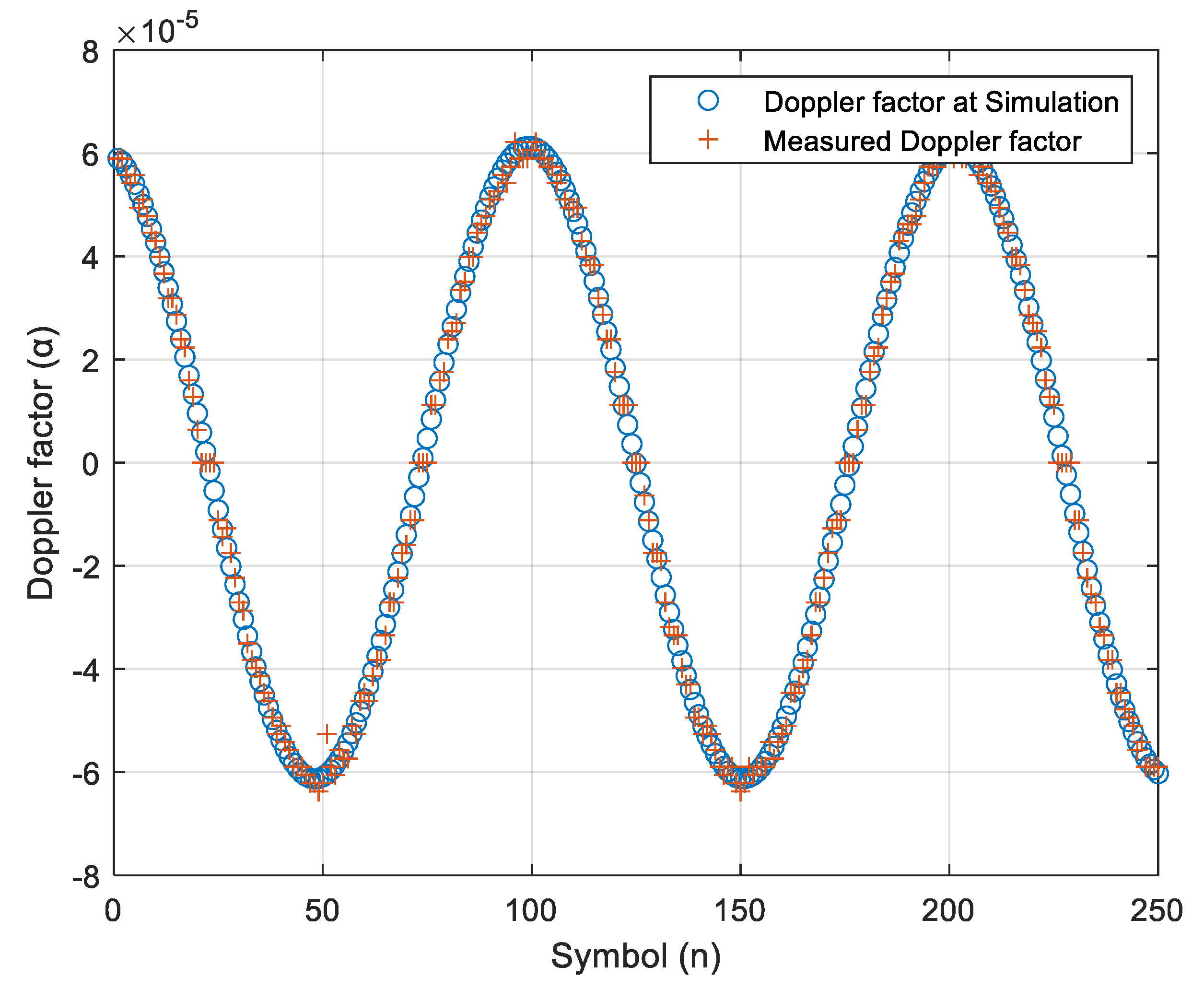
3. Simulation Results
3.1. Simulation Channel Characteristics
3.2. Performance Comparison
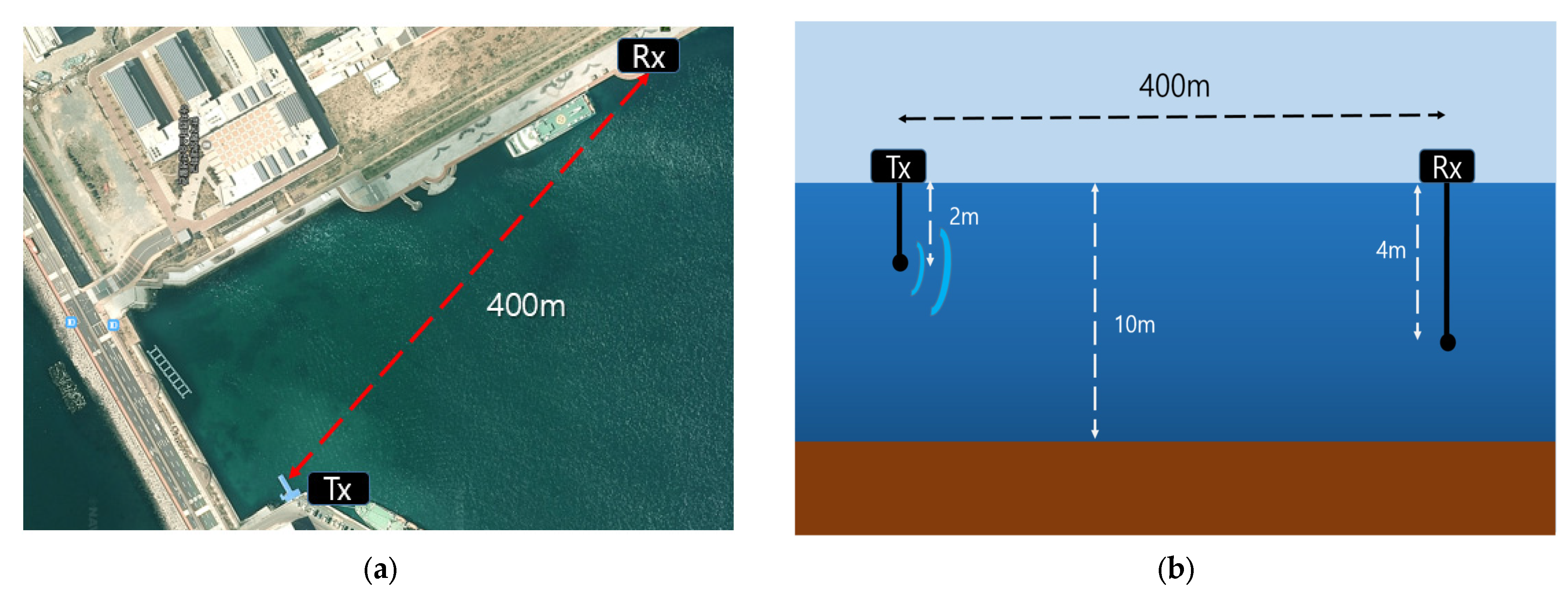
4. Experimental Results
4.1. Experimental Environment
4.2. The Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dushaw, B.D. The acoustic thermometry of ocean climate (ATOC) project: Towards depth-averaged temperature maps of the north Pacific Ocean. In Proceedings of the International Symposium on Acoustic Tomography and Thermometry, Tokyo, Japan, 8–9 February 1999; pp. 8–9. [Google Scholar]
- Stojanovic, M. Underwater acoustic communications. In Proceedings of the Electro/International 1995, Boston, MA, USA, 21–23 June 1995; pp. 435–440. [Google Scholar]
- Urick, R.J. Principle of Underwater Sound, 3rd ed.; McGraw-Hill Book Company: New York, NY, USA, 1996; pp. 99–197. [Google Scholar]
- Du, P.; Zhu, X.; Li, Y. Direct sequence spread spectrum underwater acoustic communication based on differential correlation detector. In Proceedings of the 2018 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Qingdao, China, 14–16 September 2018; pp. 1–5. [Google Scholar]
- Freitag, L.; Stojanovic, M.; Singh, S.; Johnson, M. Analysis of channel effects on direct-sequence and frequency-hopped spread-spectrum acoustic communication. IEEE J. Ocean. Eng. 2001, 26, 586–593. [Google Scholar] [CrossRef]
- Stojanovic, M.; Proarkis, J.G.; Rice, J.A.; Green, M.D. Spread spectrum underwater acoustic telemetry. In Proceedings of the IEEE Oceanic Engineering Society. OCEANS’98. Conference Proceedings (Cat. No. 98CH36259), Nice, France, 28 September–1 October 1998; IEEE: New York, NY, USA, 1998; Volume 2, pp. 650–654. [Google Scholar]
- Demirors, E.; Melodia, T. Chirp-based lpd/lpi underwater acoustic communications with code-time-frequency multidimensional spreading. In Proceedings of the 11th ACM International Conference on Underwater Networks and Systems, Shanghai, China, 24–26 October 2016; pp. 1–6. [Google Scholar]
- Stojanovic, M. Recent advances in high-speed underwater acoustic communication. IEEE J. Ocean. Eng. 1996, 21, 125–136. [Google Scholar] [CrossRef]
- Mosca, F.; Matte, G.; Mingnard, V.; Rioblanc, M. Low frequency source for very long range underwater communication. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–5. [Google Scholar]
- Song, H.C. Acoustic communication in deep water exploiting multiple beams with a horizontal array. J. Acoust. Soc. Am. 2012, 132, EL81–EL87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qu, F.; Yang, L.; Yang, T.C. High reliability direct-sequence spread spectrum for underwater acoustic communications. In Proceedings of the 2009 OCEANS, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Liu, Z.; Yoo, K.; Yang, T.C.; Cho, S.E.; Song, H.C.; Ensberg, D.E. Long-Range Double-Differentially Coded Spread-Spectrum Acoustic Communications with a Towed Array. IEEE J. Ocean. Eng. 2013, 39, 482–490. [Google Scholar] [CrossRef]
- Walree, P.A.V.; Buen, H.; Otnes, R. A performance comparison between DSSS. M-FSK, and frequency-division multiplexing in underwater acoustic channels. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–5. [Google Scholar]
- Van Walree, P.; Sangfelt, E.; Leus, G. Multicarrier spread spectrum for covert acoustic communications. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Ritcey, J.A.; Griep, K.R. Code shift keyed spread spectrum for ocean acoustic telemetry. In Proceedings of the Challenges of Our Changing Global Environment. OCEANS’95 MTS/IEEE, San Diego, CA, USA, 9–12 October 1995; IEEE: New York, NY, USA, 1995; Volume 3, pp. 1386–1391. [Google Scholar]
- He, C.; Jing, L.; Zhang, Q.; Huang, J. Multiuser underwater acoustic communication using cyclic shift keying. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Jing, L.; Huang, J. Cyclic shift keying spread spectrum OFDM method over underwater acoustic channel. In Proceedings of the 2012 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC 2012), Hong Kong, China, 12–15 August 2012; pp. 798–801. [Google Scholar]
- Yang, G.; Zhou, F.; Lou, Y.; Qiao, G.; Ahmed, N.; He, Y. Double-differential coded M-ary direct sequence spread spectrum for mobile underwater acoustic communication system. Appl. Acoust. 2021, 183, 108303. [Google Scholar] [CrossRef]
- Ra, H.I.; An, J.H.; Yoon, C.H.; Kim, K.M. Superimposed DSSS transmission based on cyclic shift keying in underwater acoustic communication. In Proceedings of the OCEANS 2021: San Diego–Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–4. [Google Scholar]
- Zhou, F.; Liu, B.; Nie, D.; Yang, G.; Zhang, W.; Ma, D. Mary cyclic shift keying spread spectrum underwater acoustic communications based on virtual time-reversal mirror. Sensors 2019, 19, 3577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, G.; He, X.; Liu, J. A novel Mary dierential underwater acoustic direct sequence spread spectrum communication system. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016. [Google Scholar]
- Yang, G.; Qiao, G.; Zhou, F.; He, Y.; Zhao, Y.; Liu, Y. Doppler tracking and symbol synchronization method for mobile Mary spread spectrum underwater acoustic communications. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 550–555. [Google Scholar]
- Yang, W.B.; Yang, T.C. High-frequency channel characterization for Mary frequency-shift-keying underwater acoustic communications. J. Acoust. Soc. Am. 2006, 120, 2615–2626. [Google Scholar] [CrossRef]
- Lindsey, W.C.; Chie, C.M. A survey of digital phase-locked loops. Proc. IEEE 1981, 69, 410–431. [Google Scholar] [CrossRef]
- Pursley, M.B.; Royster, T.C. High-rate direct-sequence spread spectrum with error-control coding. IEEE Trans. Commun. 2006, 54, 1693–1702. [Google Scholar] [CrossRef]
- Wang, K.; Chen, S.; Liu, C.; Liu, Y.; Xu, Y. Doppler estimation and timing synchronization of underwater acoustic communication based on hyperbolic frequency modulation signal. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015; pp. 75–80. [Google Scholar]
- Transter, W.H.; Shanmugan, K.S.; Rapport, T.S.; Kobar, K.L. Principle of Communication Systems Simulation with Wireless Application; Prentice Hall: Upper Saddle River, NJ, USA, 2003; Chapter 3. [Google Scholar]
- Van Walree, P.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The Watermark Benchmark for Underwater Acoustic Modulation Schemes. IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef] [Green Version]
- Gavial ITC Transducers. Available online: https://www.gavial.com/_files/ugd/8aa48d_c59692d9461c47be92502ee6ba9ec81c.pdf (accessed on 1 April 2022).
- Reson Hydrophone. Available online: https://www.m-b-t.com/fileadmin/redakteur/Ozeanographie/Hydrophone/Produktblaetter/TC4032.pdf (accessed on 1 April 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sampling frequency | 192 kHz |
| Carrier frequency | 12.5 kHz |
| Bandwidth | 2 kHz |
| SNR | −30~0 dB |
| Parameter | CSK | MSS | MCSK | MCSS |
|---|---|---|---|---|
| Data rate (bps) | 30 | 30 | 60/30 | 60/30 |
| Symbol rate (sps) | 10 | 10 | 10/5 | 10/5 |
| Number of sequences | 127 | 127 | 127/255 | 127/255 |
| Parameters | Value |
|---|---|
| Sampling frequency | 192 kHz |
| Carrier frequency | 12.5 kHz |
| Data rate | 10~60 bps |
| Bandwidth | 1.92 kHz |
| Range between projector and hydrophone | 400 m |
| Projector depth | 2 m |
| Hydrophone depth | 4 m |
| Projector | ICT-3013 |
| Hydrophone | Teledyne Reson TC4032 |
| Parameter | DSSS | CSK | MSS | MCSK | MCSS |
|---|---|---|---|---|---|
| Data rate (bps) | 10 | 30 | 30 | 60 | 60 |
| Symbol rate (sps) | 10 | 10 | 10 | 10 | 10 |
| Number of sequences | 127 | 127 | 127 | 127 | 127 |
| Trials | DSSS | CSK | MSS | MCSK | MCSS |
|---|---|---|---|---|---|
| 1 | |||||
| 2 | |||||
| 3 | |||||
| Average |
| Trials | MSS | MCSS |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| Average |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ra, H.; Youn, C.; Kim, K. High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum. Electronics 2022, 11, 1698. https://doi.org/10.3390/electronics11111698
Ra H, Youn C, Kim K. High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum. Electronics. 2022; 11(11):1698. https://doi.org/10.3390/electronics11111698
Chicago/Turabian StyleRa, HyungIn, Changhyun Youn, and Kiman Kim. 2022. "High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum" Electronics 11, no. 11: 1698. https://doi.org/10.3390/electronics11111698
APA StyleRa, H., Youn, C., & Kim, K. (2022). High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum. Electronics, 11(11), 1698. https://doi.org/10.3390/electronics11111698