
Optimal Coordinated Control Strategy of Clustered DC Microgrids under Load-Generation Uncertainties Based on GWO




Abstract
:1. Introduction
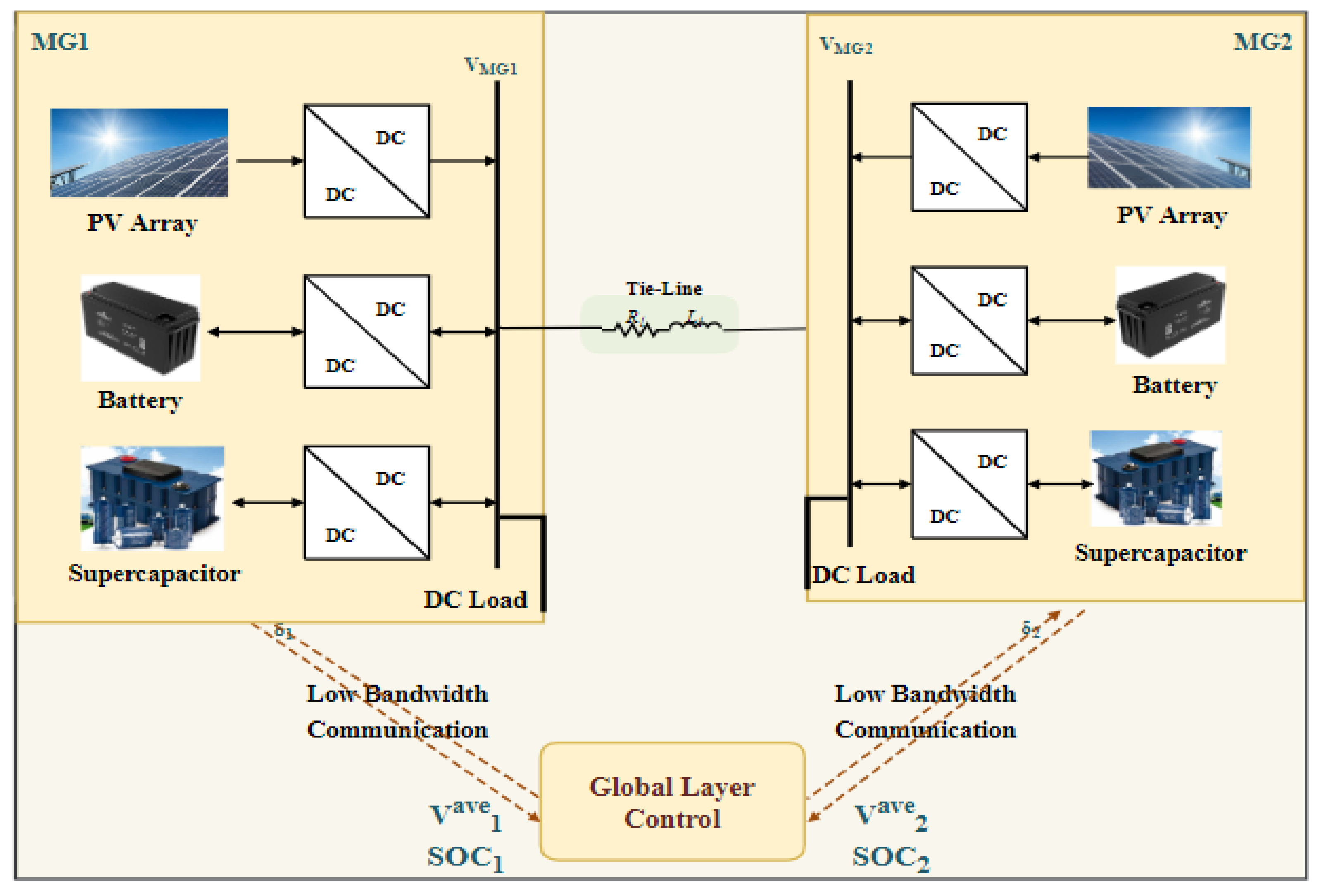
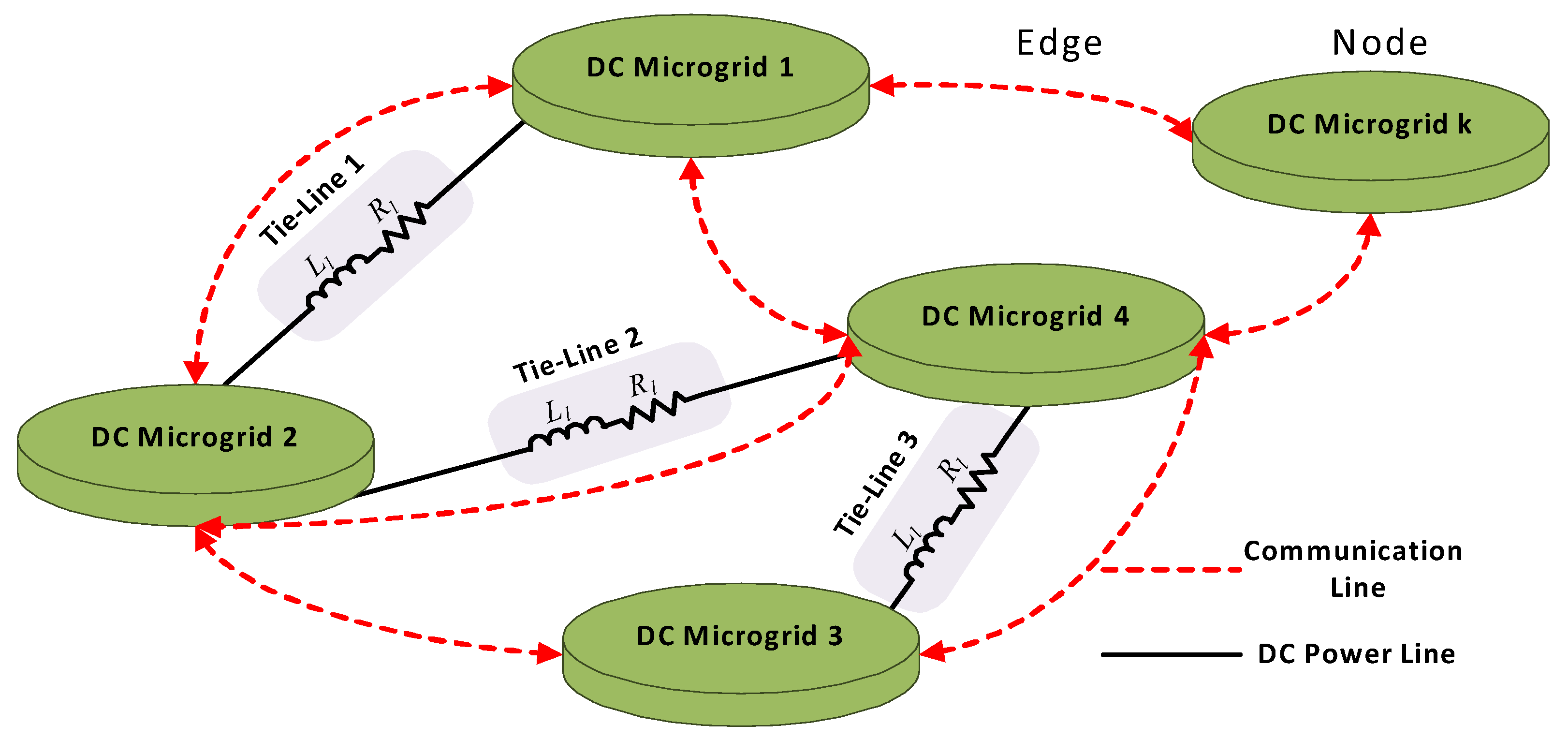
2. Configuration and Control
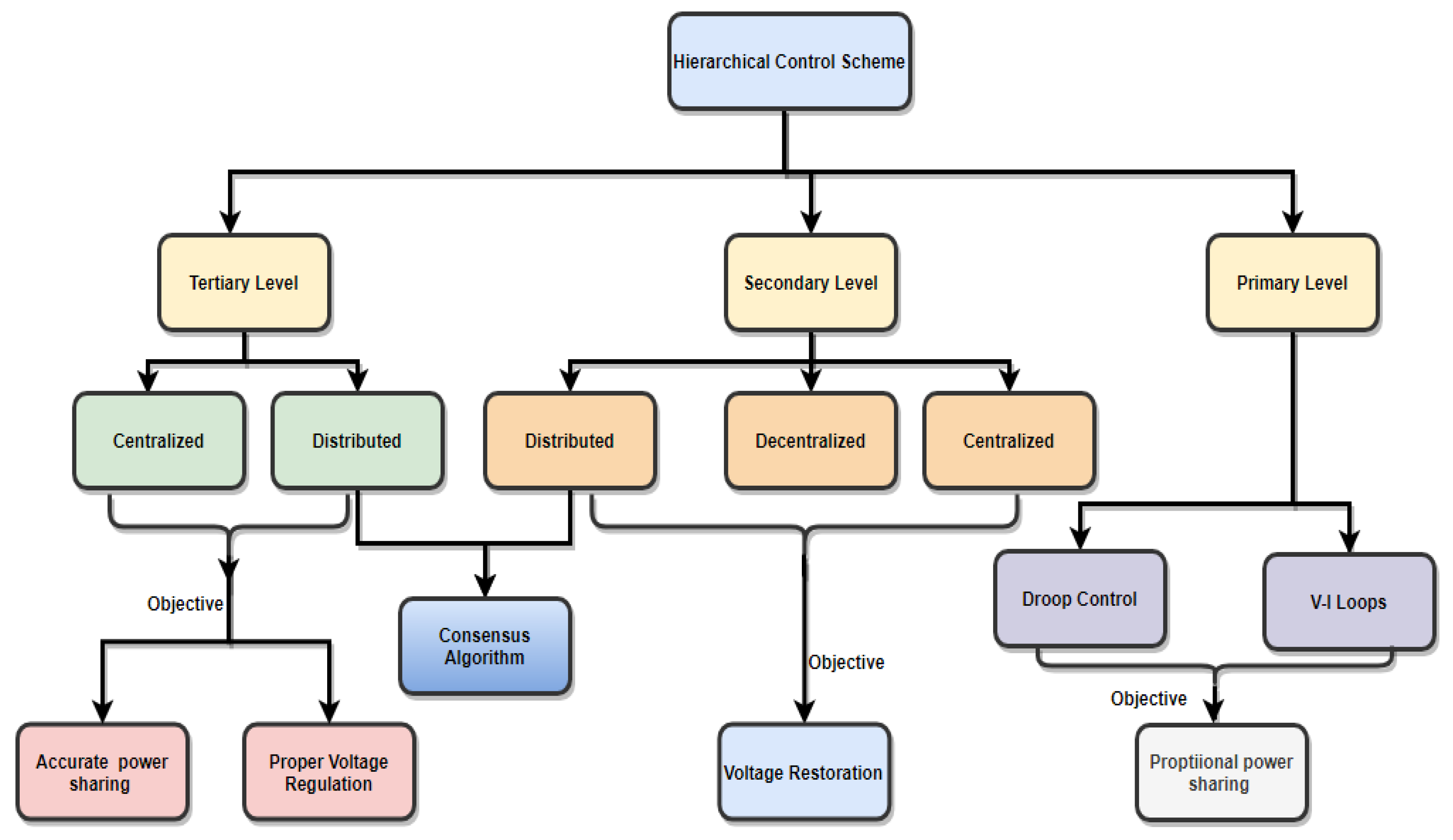
3. Hierarchical Control Strategy
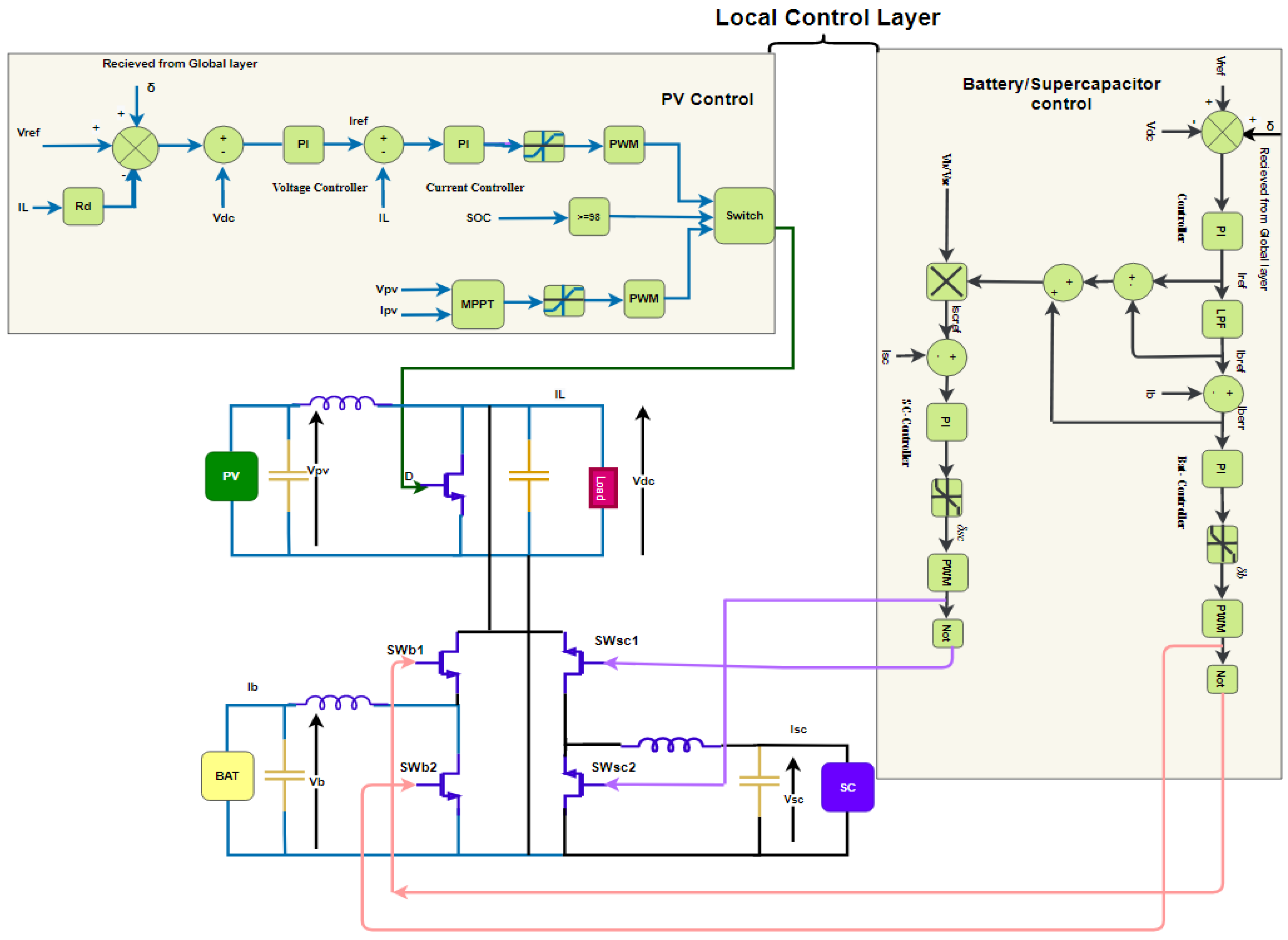
3.1. Local Control Layer
3.2. Global Control Layer
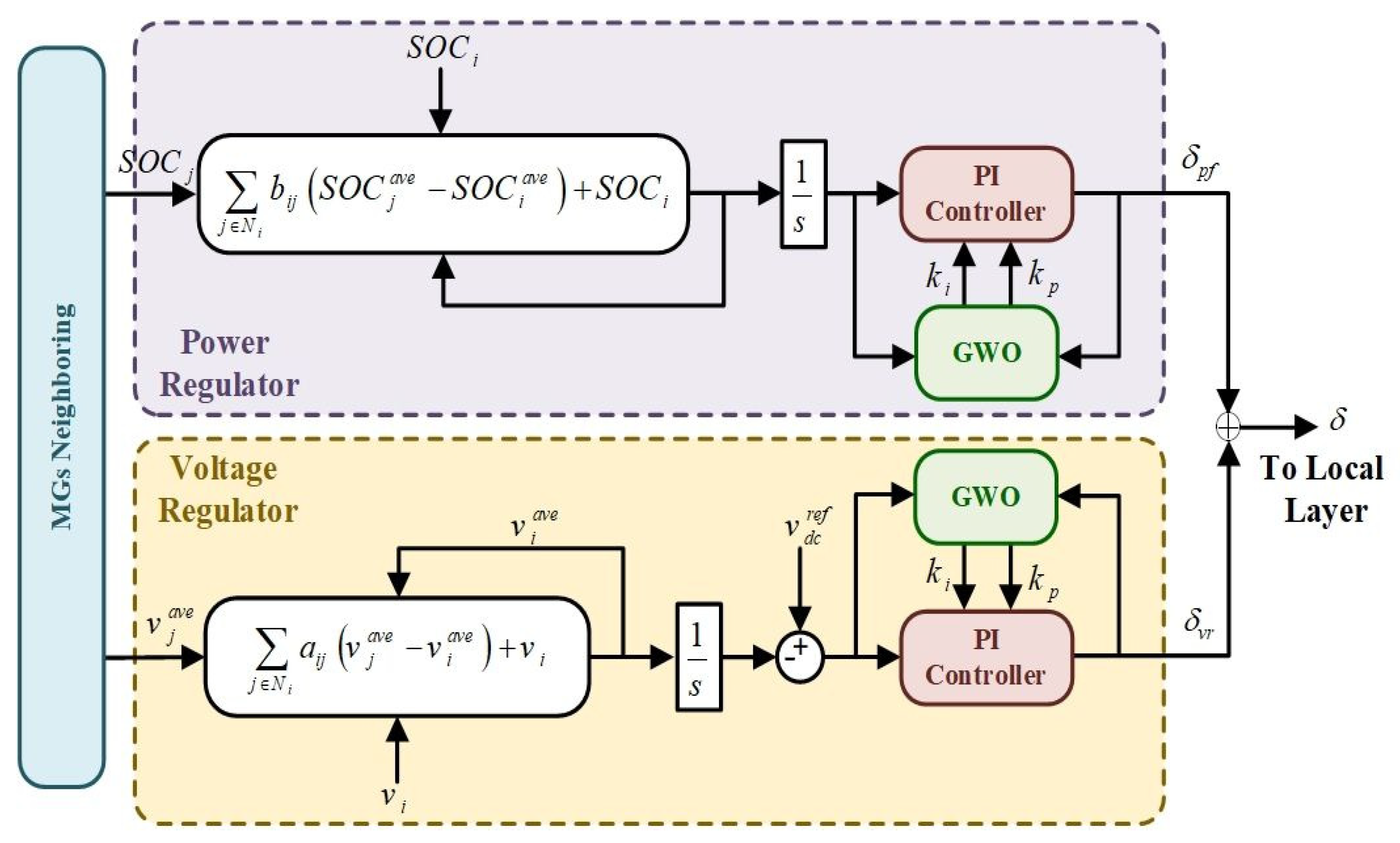
3.2.1. Secondary Control
3.2.2. Tertiary Control Level
4. Proposed Control Technique
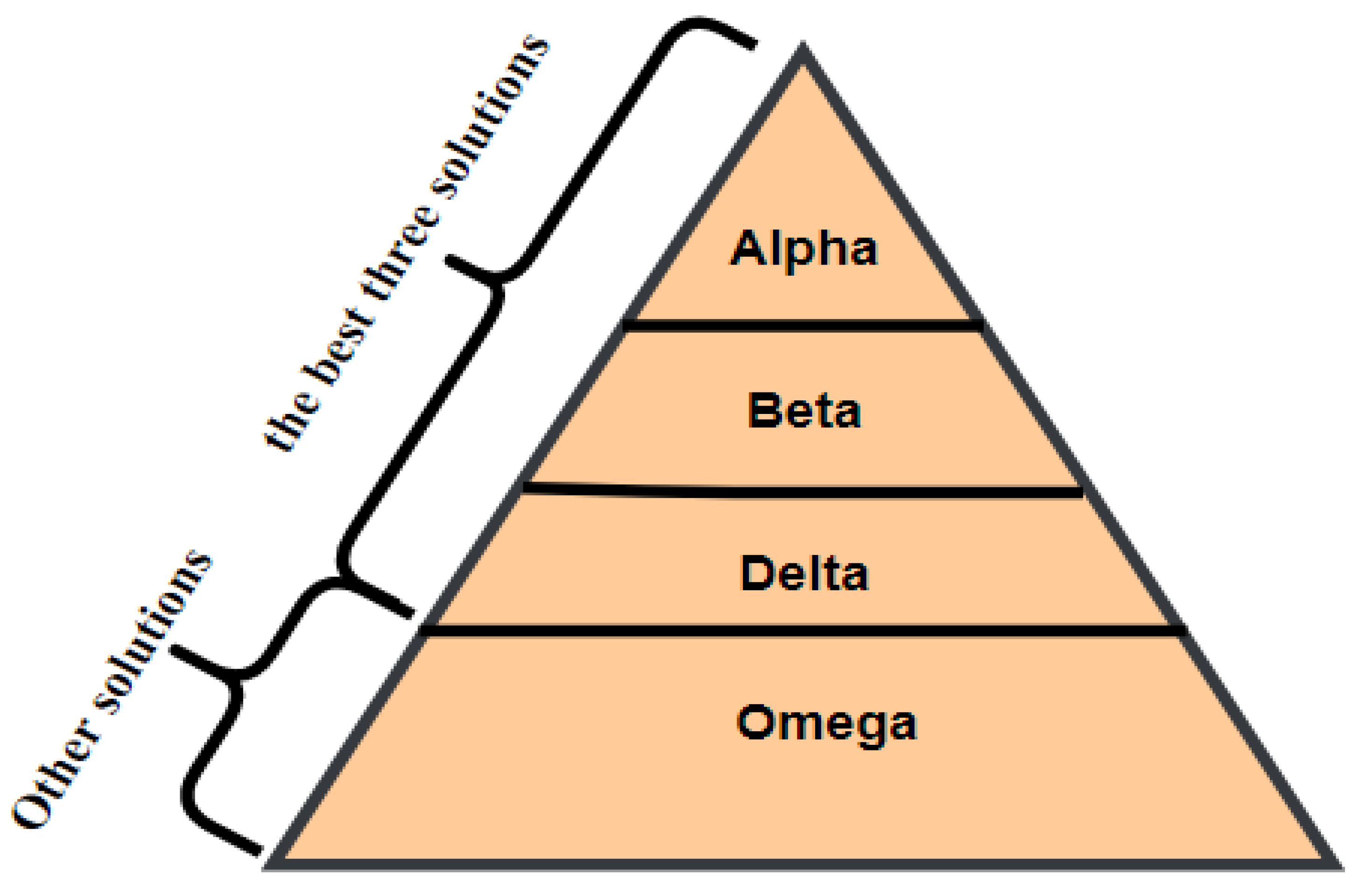
4.1. Grey Wolf Optimizer
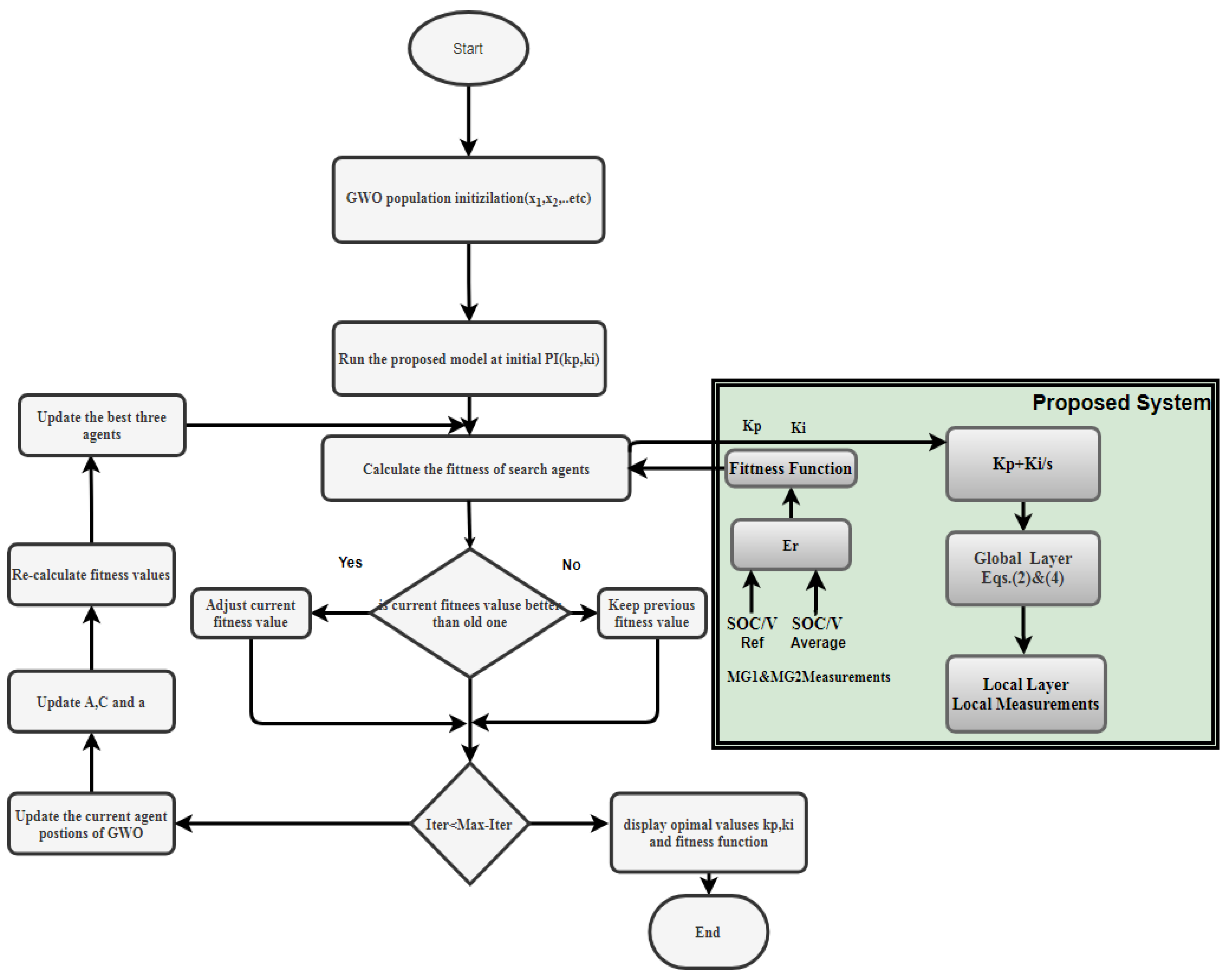
4.2. Problem Formulation
- Generate the populations of grey wolves, , and so on, indicating that each grey wolf () represents Kp and Ki in this study.
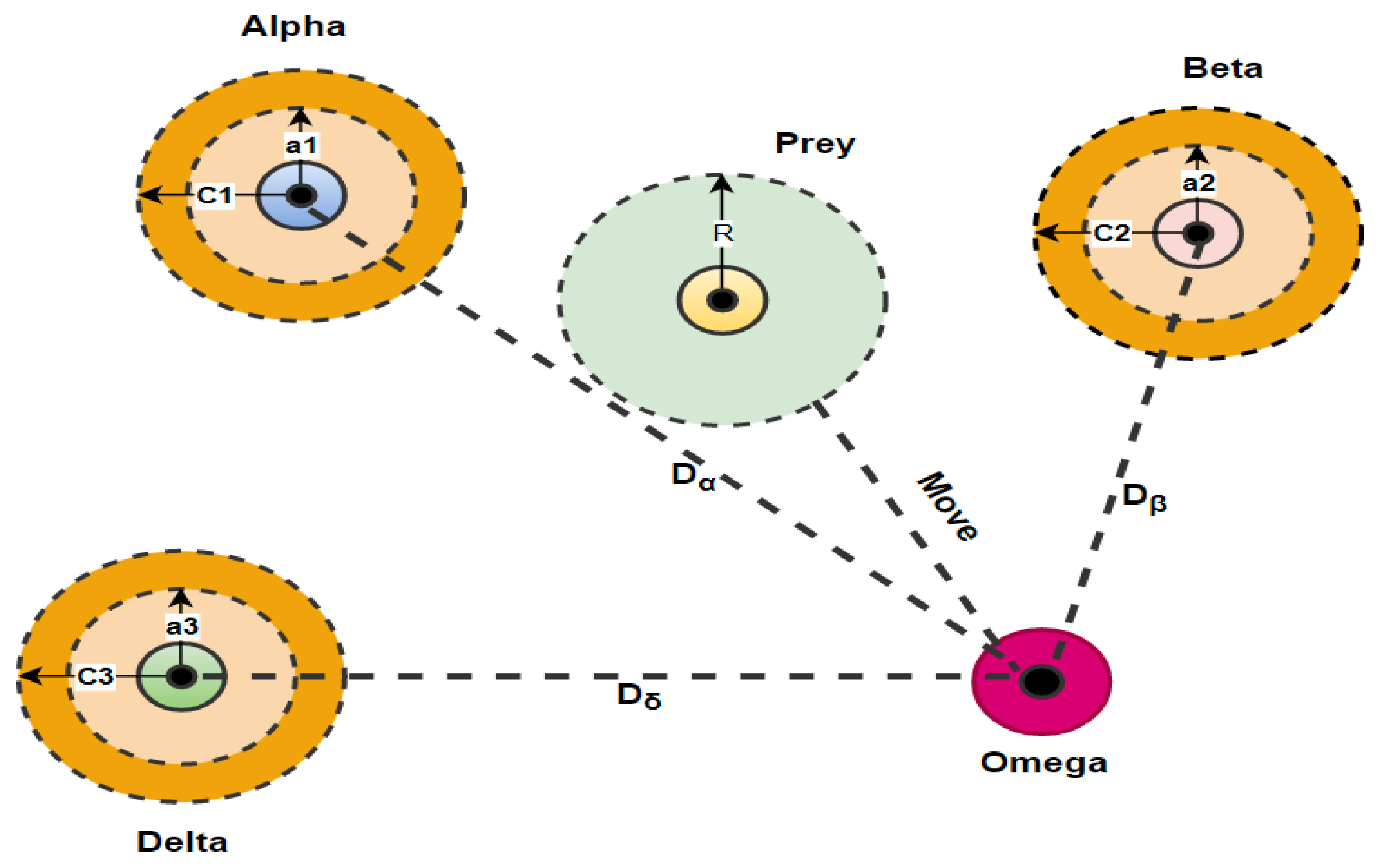
- Initialize coefficients , and which are illustrated in Figure 7 so that their exploration and development capabilities may be used to improve the GWO algorithm’s balance.
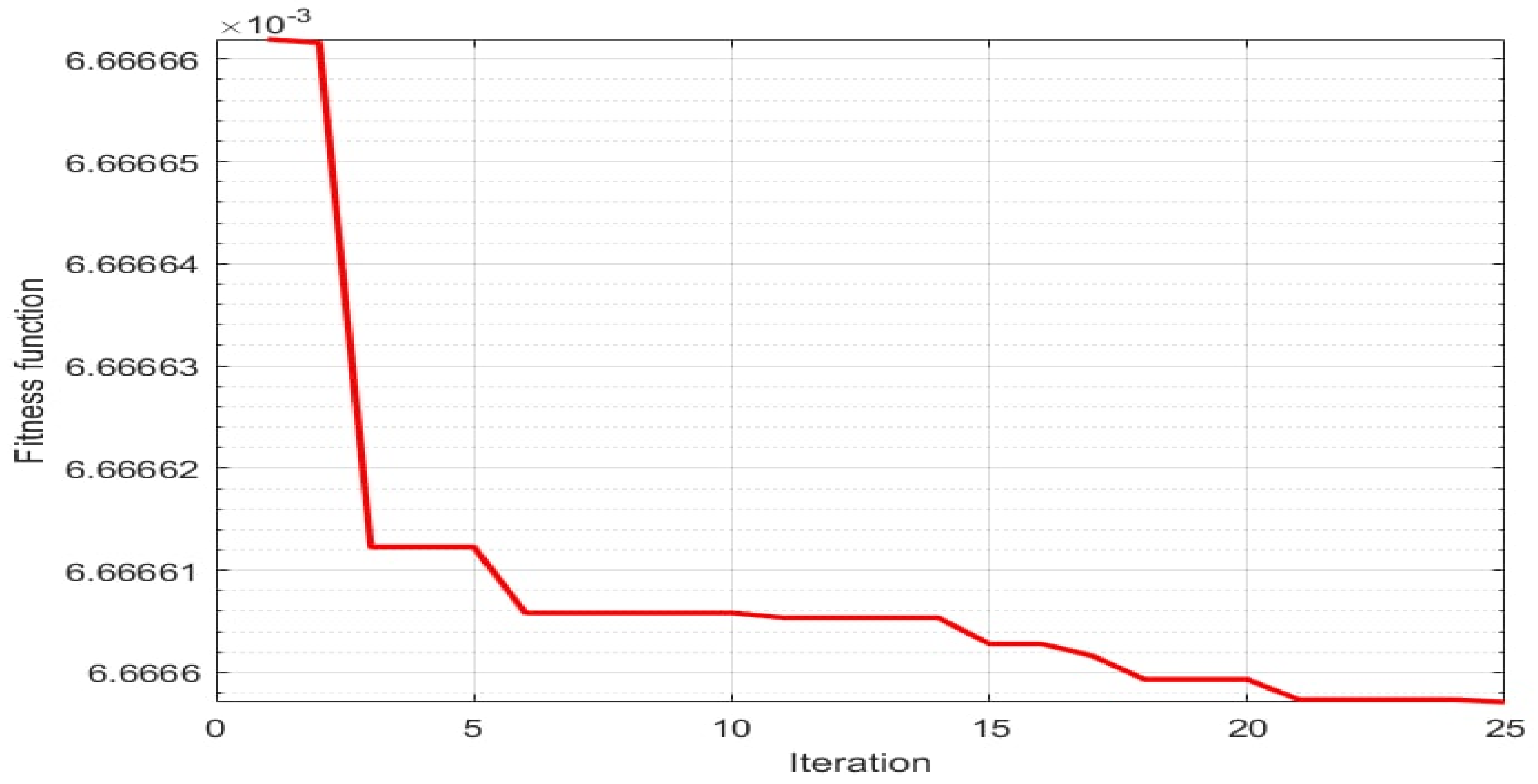
- Determine the top three wolves by calculating the fitness value of each agent (wolf).
- In the case that the current iteration is less than the maximal iterations threshold, all other wolves (ω) will update the places based on Step 3. Alternatively, the optimal values of X agents (Kp and Ki) will be attained to be implemented in Equations (2) and (4) to determine the best values of and for our system.
- Then all the coefficients , and will be updated in accordance with the first condition in Step 4. After that, the value of each search agent/wolf is re-calculated.
- Based on the preceding updates, the best three wolves, α, β, and δ are updated. This process is repeated until the best values of Kp and Ki are obtained.
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Q.; Xu, Y.; Xu, Z.; Xie, L.; Blaabjerg, F. A Hierarchically Coordinated Operation and Control Scheme for DC Microgrid Clusters under Uncertainty. IEEE Trans. Sustain. Energy 2021, 12, 273–283. [Google Scholar] [CrossRef]
- Lasseter, R.H. MicroGrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, Conference Proceedings (Cat. No. 02CH37309), New York, NY, USA, 27–31 January 2002; pp. 305–308. [Google Scholar] [CrossRef]
- Sahoo, S.K.; Sinha, A.K.; Kishore, N.K. Control Techniques in AC, DC, and Hybrid AC-DC Microgrid: A Review. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 738–759. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Roldán-Pérez, J.; Vasquez, J.C.; Guerrero, J.M. Modeling and Sensitivity Study of Consensus Algorithm-Based Distributed Hierarchical Control for DC Microgrids. IEEE Trans. Smart Grid 2016, 7, 1504–1515. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Pu, Y.; Li, Q.; Fu, W.; Chen, W.; You, Z.; Liu, H. Coordinated power control with virtual inertia for fuel cell-based DC microgrids cluster. Int. J. Hydrogen Energy 2019, 44, 25207–25220. [Google Scholar] [CrossRef]
- Guo, L.; Li, P.; Li, X.; Huang, D.; Zhu, J. Flexible control of DC interlinked multiple MGs cluster. IET Gener. Transm. Distrib. 2019, 13, 2088–2101. [Google Scholar] [CrossRef]
- Hamid, Z.; Al-Tameemi, A.; Lie, T.T.; Foo, G.; Blaabjerg, F. Control Strategies of DC Microgrids Cluster: A Comprehensive Review. Energies 2021, 14, 7569. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. IEEE Trans. Energy Convers. 2008, 23, 241–248. [Google Scholar] [CrossRef]
- Babazadeh-Dizaji, R.; Hamzeh, M.; Hekmati, A. Power Sharing in Multiple DC Microgrids Based on Concentrated Control. In Proceedings of the Electrical Engineering (ICEE), Iranian Conference on, Mashhad, Iran, 8–10 May 2018. [Google Scholar] [CrossRef]
- Kumar, M.; Srivastava, S.C.; Singh, S.N.; Ramamoorty, M. Development of a control strategy for interconnection of islanded direct current microgrids. IET Renew. Power Gener. 2015, 9, 284–296. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar] [CrossRef] [Green Version]
- Zaery, M.; Wang, P.; Wang, W.; Xu, D. Distributed Global Economical Load Sharing for a Cluster of DC Microgrids. IEEE Trans. Power Syst. 2020, 35, 3410–3420. [Google Scholar] [CrossRef]
- Babazadeh-Dizaji, R.; Hamzeh, M. Distributed Hierarchical Control for Optimal Power Dispatch in Multiple DC Microgrids. IEEE Syst. J. 2020, 14, 1015–1023. [Google Scholar] [CrossRef]
- Abhishek, A.; Devassy, S.; Akbar, S.A.; Singh, B. Consensus Algorithm based Two-Level Control Design for a DC Microgrid. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020. [Google Scholar] [CrossRef]
- Dam, D.H.; Lee, H.H. An adaptive power distributed control method to ensure proportional load power sharing in DC microgrid considering equivalent line impedances. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar] [CrossRef]
- Papadimitriou, C.N.; Zountouridou, E.I.; Hatziargyriou, N.D. Review of hierarchical control in DC microgrids. Electr. Power Syst. Res. 2015, 122, 159–167. [Google Scholar] [CrossRef]
- Abhishek, A.; Ranjan, A.; Devassy, S.; Verma, B.K.; Ram, S.K.; Dhakar, A.K. Review of hierarchical control strategies for DC microgrid. IET Renew. Power Gener. 2020, 14, 1631–1640. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, H.; Sun, Q.; Ma, D.; Huang, B. Event-based distributed active power sharing control for interconnected AC and DC microgrids. IEEE Trans. Smart Grid 2018, 9, 6815–6828. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical control for multiple DC-microgrids clusters. In Proceedings of the 2014 IEEE 11th International Multi-Conference on Systems, Signals & Devices (SSD14), Barcelona, Spain, 11–14 February 2014; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical control for multiple DC-microgrids clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef] [Green Version]
- Moayedi, S.; Davoudi, A. Distributed Tertiary Control of DC Microgrid Clusters. IEEE Trans. Power Electron. 2016, 31, 1717–1733. [Google Scholar] [CrossRef]
- Wu, C.; Hou, X.; Wang, Y.; Chen, X.; Liao, C. SOC-featured Distributed Tertiary Control for Energy Management in DC Microgrid Clusters. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 1–14 August 2019. [Google Scholar] [CrossRef]
- Moayedi, S.; Davoudi, A. Cooperative power management in DC microgrid clusters. In Proceedings of the 2015 IEEE First International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015. [Google Scholar] [CrossRef]
- Keshta, H.E.; Saied, E.M.; Malik, O.P.; Bendary, F.M.; Ali, A.A. Fuzzy PI controller-based model reference adaptive control for voltage control of two connected microgrids. IET Gener. Transm. Distrib. 2020, 15, 602–618. [Google Scholar] [CrossRef]
- Hu, P.; Pan, J.S.; Chu, S.C. Improved Binary Grey Wolf Optimizer and Its application for feature selection. Knowl.-Based Syst. 2020, 195, 105746. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.M.; Zhao, J. An improved grey Wolf optimization algorithm with variable weights. Comput. Intell. Neurosci. 2019, 2019, 2981282. [Google Scholar] [CrossRef]
- Gao, F.; Kang, R.; Cao, J.; Yang, T. Primary and secondary control in DC microgrids: A review. J. Mod. Power Syst. Clean Energy 2019, 7, 227–242. [Google Scholar] [CrossRef] [Green Version]
- Liu, R.; Liu, S.; Zheng, J.; Fang, W.; Liu, X. Function Controller Design in Tertiary Level for DC Microgrid Clusters. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, X.; Xu, W.; Wen, G. Modeling and Control of Islanded DC Microgrid Clusters with Hierarchical Event-Triggered Consensus Algorithm. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 376–386. [Google Scholar] [CrossRef]
- Zhou, X.; Ai, Q.; Wang, H. Adaptive marginal costs-based distributed economic control of microgrid clusters considering line loss. Energies 2017, 10, 2071. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Ertugrul, N. An overview of hierarchical control strategies for microgrids. In Proceedings of the 2019 29th Australasian Universities Power Engineering Conference (AUPEC), Nadi, Fiji, 26–29 November 2019. [Google Scholar] [CrossRef]
- Al-Tameemi, Z.H.A.; Lie, T.T.; Foo, G.; Blaabjerg, F. Optimal Power Sharing in DC Microgrid Under Load and Generation Uncertainties Based on GWO Algorithm. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies—Asia (ISGT Asia), Brisbane, Australia, 5–8 December 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Han, Y.; Ning, X.; Yang, P.; Xu, L. Review of Power Sharing, Voltage Restoration and Stabilization Techniques in Hierarchical Controlled DC Microgrids. IEEE Access 2019, 7, 149202–149223. [Google Scholar] [CrossRef]
- Singh, P.; Lather, J.S. Artificial neural network-based dynamic power management of a DC microgrid: A hardware-in-loop real-time verification. Int. J. Ambient Energy 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Mudaliyar, S.; Duggal, B.; Mishra, S. Distributed Tie-Line Power Flow Control of Autonomous DC Microgrid Clusters. IEEE Trans. Power Electron. 2020, 35, 11250–11266. [Google Scholar] [CrossRef]
- Martins, F.G. Tuning PID controllers using the ITAE criterion. Int. J. Eng. Educ. 2005, 21, 867. [Google Scholar]
- Li, Q.; Chen, H.; Huang, H.; Zhao, X.; Cai, Z.-N.; Tong, C.; Liu, W.; Tian, X. An Enhanced Grey Wolf Optimization Based Feature Selection Wrapped Kernel Extreme Learning Machine for Medical Diagnosis. Comput. Math. Methods Med. 2017, 2017, 9512741. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kp1 | 8.3511 |
| Kp2 | 48.8918 |
| Ki1 | 3.0401 |
| Ki2 | 129.6347 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Tameemi, Z.H.A.; Lie, T.T.; Foo, G.; Blaabjerg, F. Optimal Coordinated Control Strategy of Clustered DC Microgrids under Load-Generation Uncertainties Based on GWO. Electronics 2022, 11, 1244. https://doi.org/10.3390/electronics11081244
Al-Tameemi ZHA, Lie TT, Foo G, Blaabjerg F. Optimal Coordinated Control Strategy of Clustered DC Microgrids under Load-Generation Uncertainties Based on GWO. Electronics. 2022; 11(8):1244. https://doi.org/10.3390/electronics11081244
Chicago/Turabian StyleAl-Tameemi, Zaid Hamid Abdulabbas, Tek Tjing Lie, Gilbert Foo, and Frede Blaabjerg. 2022. "Optimal Coordinated Control Strategy of Clustered DC Microgrids under Load-Generation Uncertainties Based on GWO" Electronics 11, no. 8: 1244. https://doi.org/10.3390/electronics11081244
APA StyleAl-Tameemi, Z. H. A., Lie, T. T., Foo, G., & Blaabjerg, F. (2022). Optimal Coordinated Control Strategy of Clustered DC Microgrids under Load-Generation Uncertainties Based on GWO. Electronics, 11(8), 1244. https://doi.org/10.3390/electronics11081244