
A PVT-Insensitive Optimal Phase Noise Point Tracking Bias Calibration in Class-C VCO


Abstract
:1. Introduction
2. Proposed Circuit Implementation
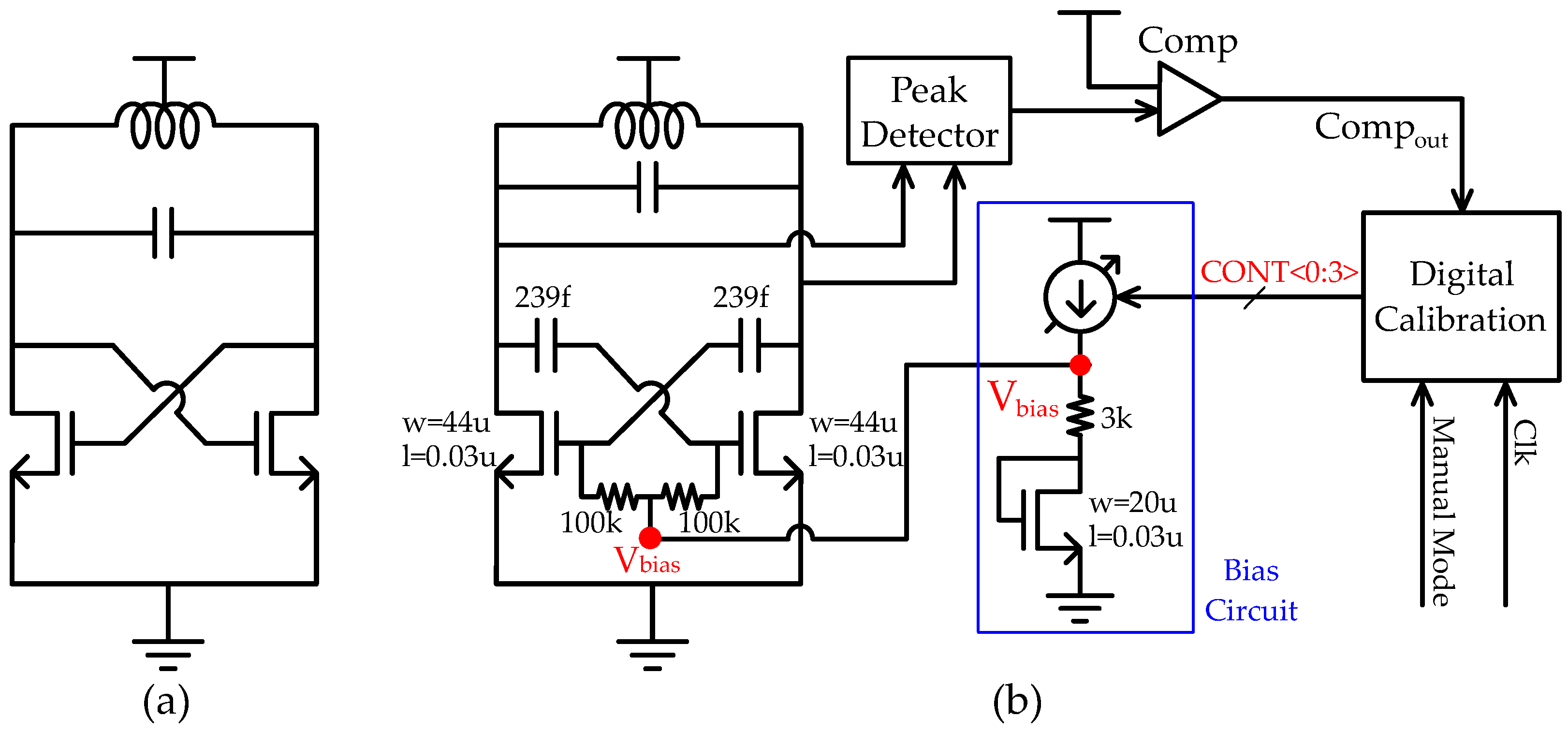
2.1. Bias Circuit for Class-C VCO
2.1.1. Conventional Bias Circuit
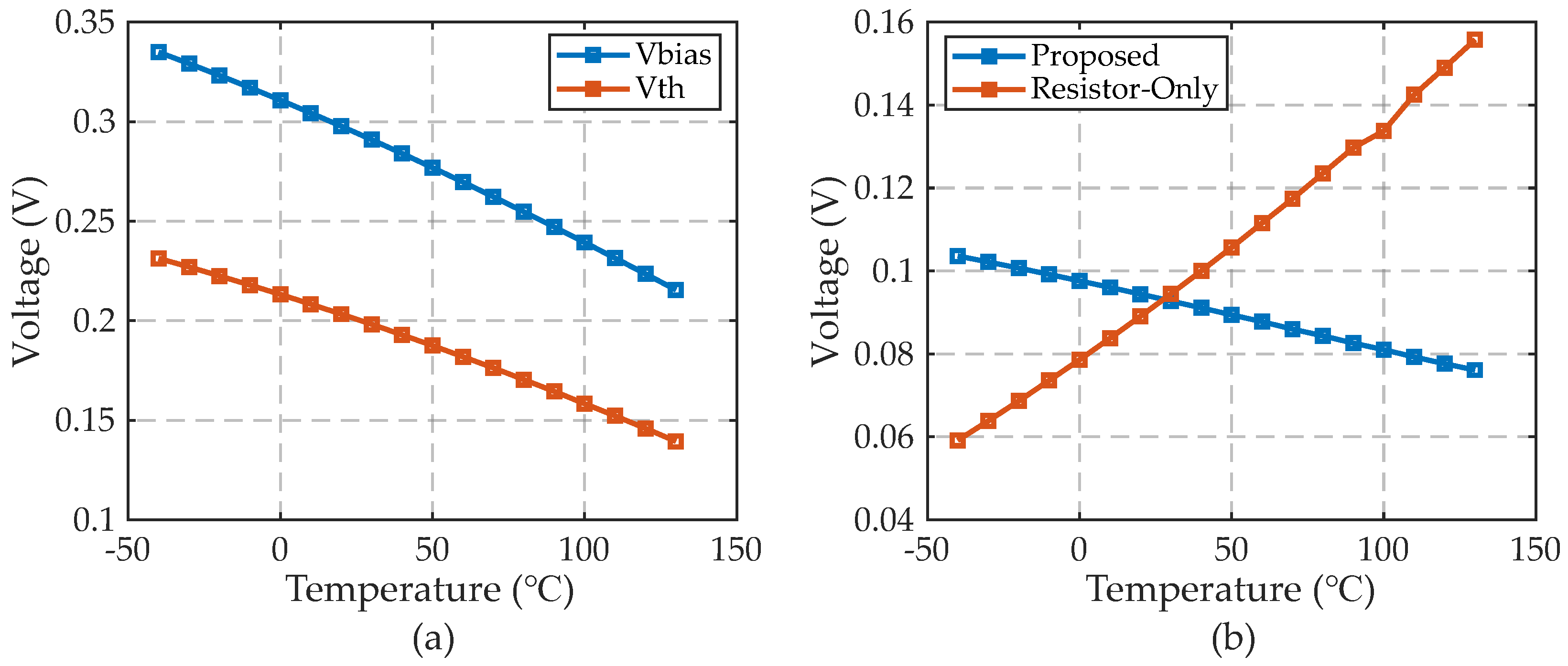
2.1.2. Proposed Bias Circuit
2.2. Proposed Algorithm for Digital Calibration
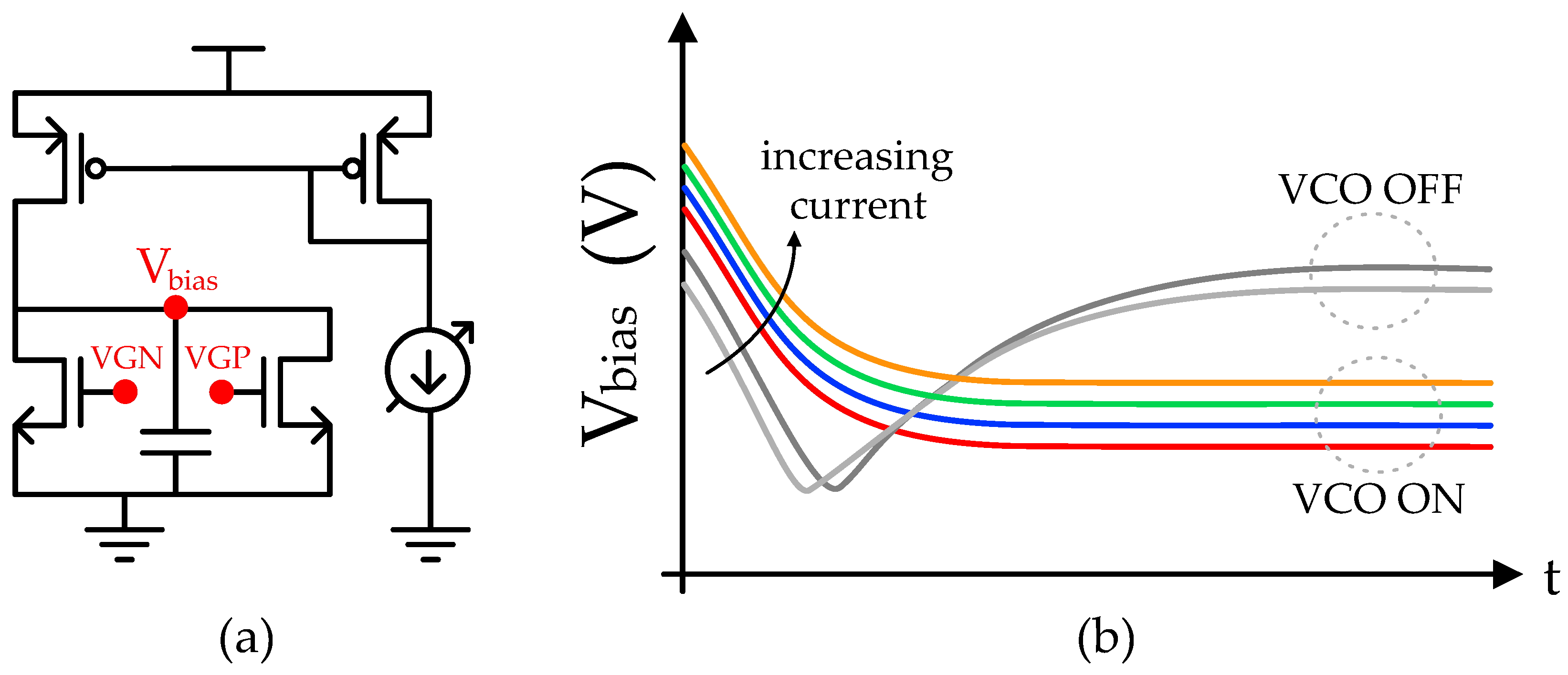
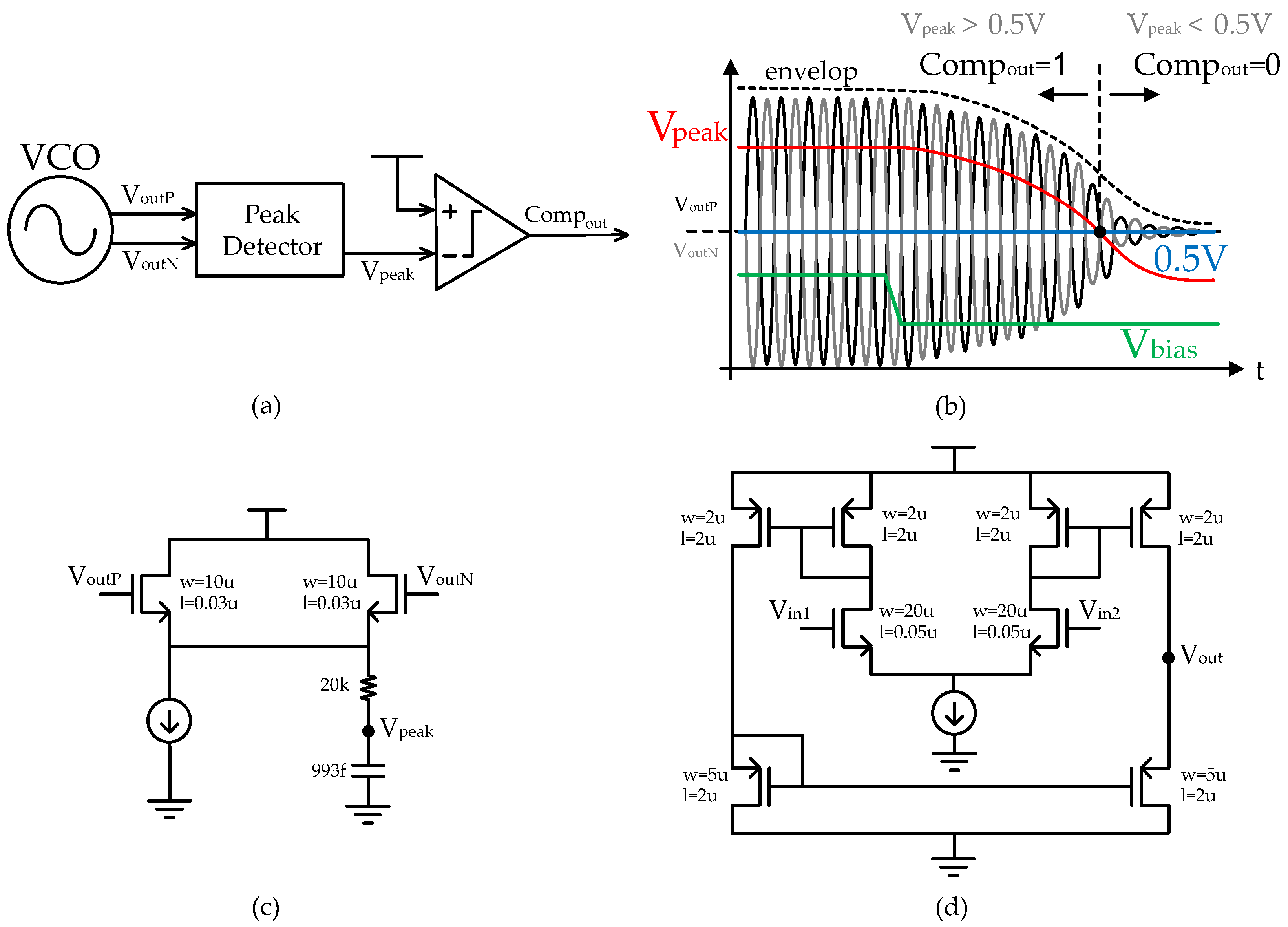
2.2.1. Tendency of Phase Noise According to Bias Voltage
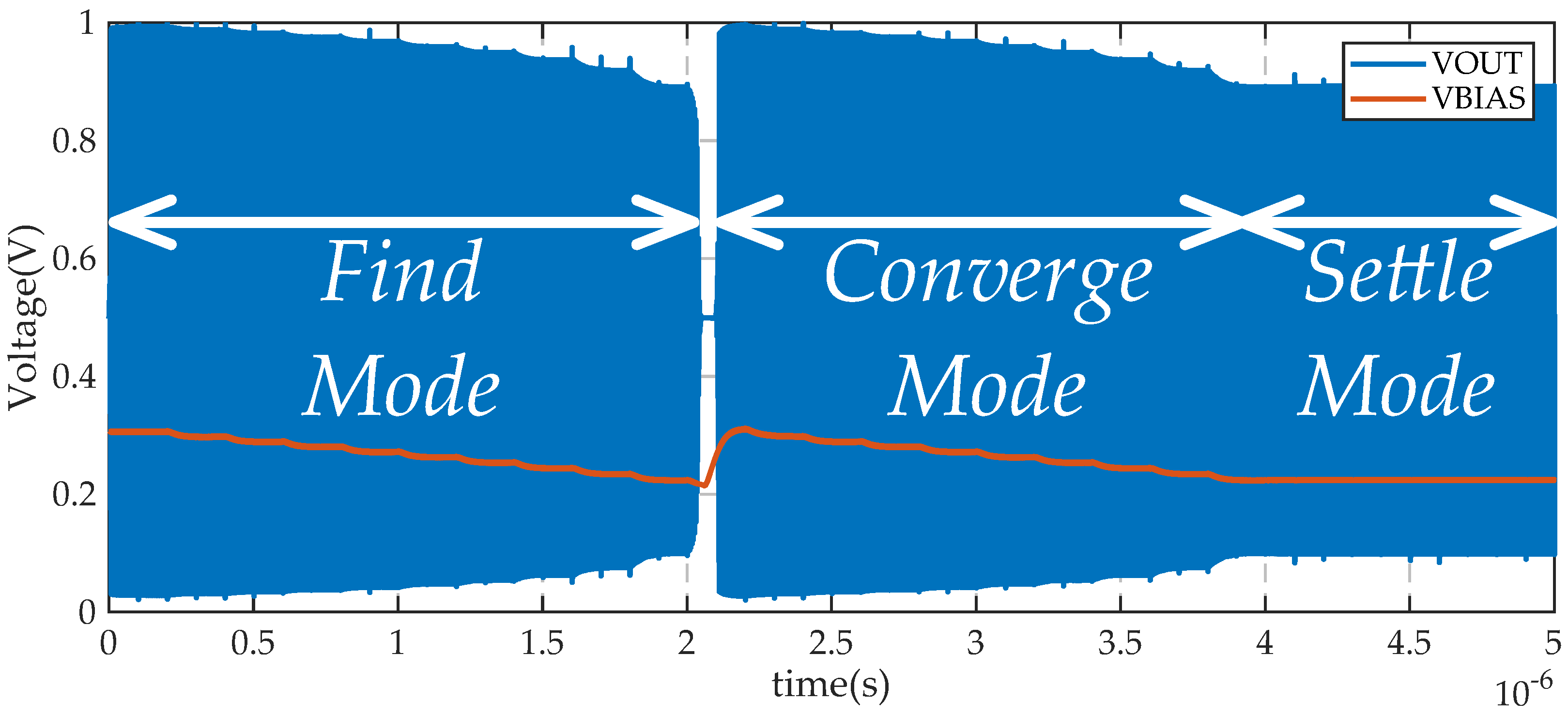
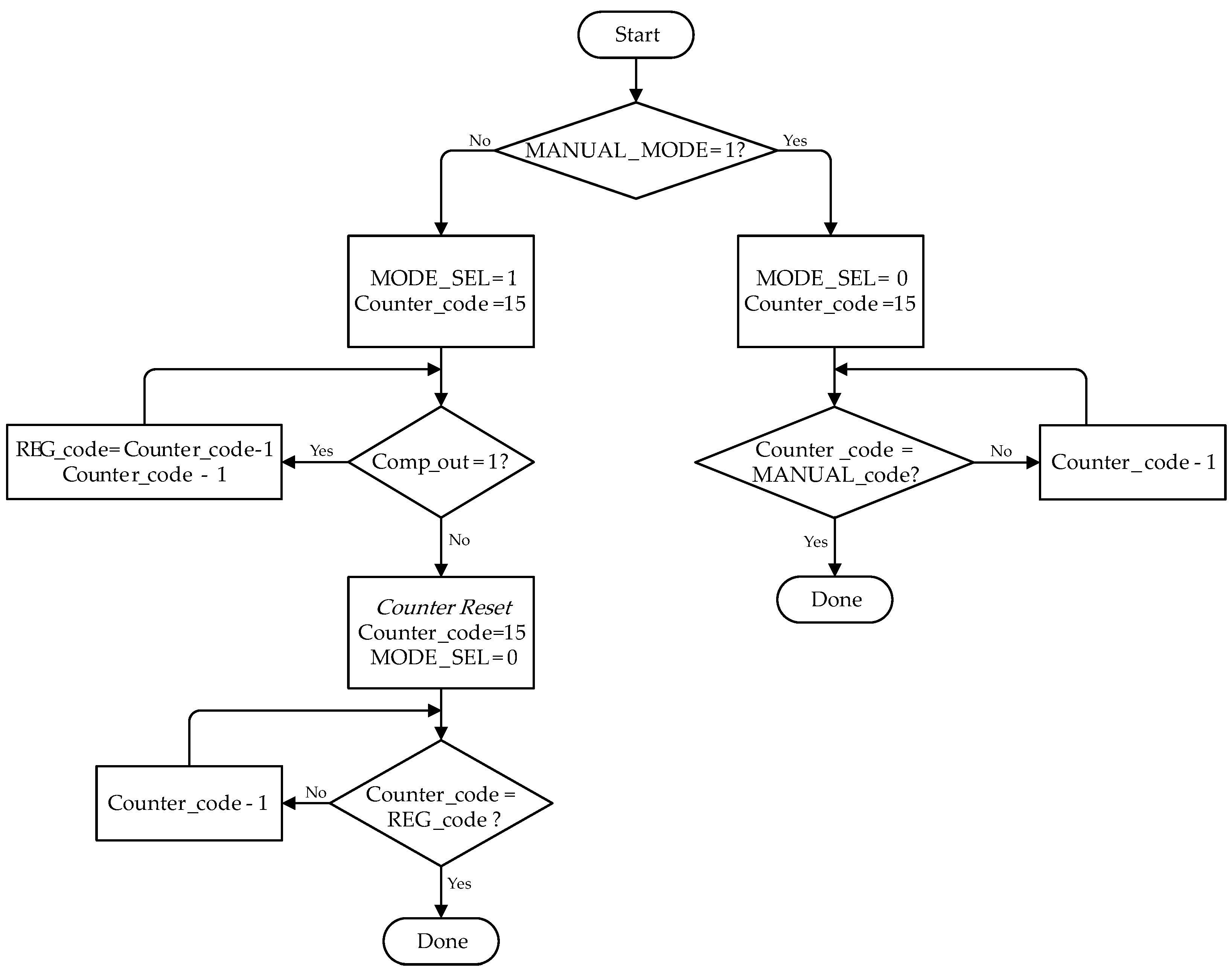
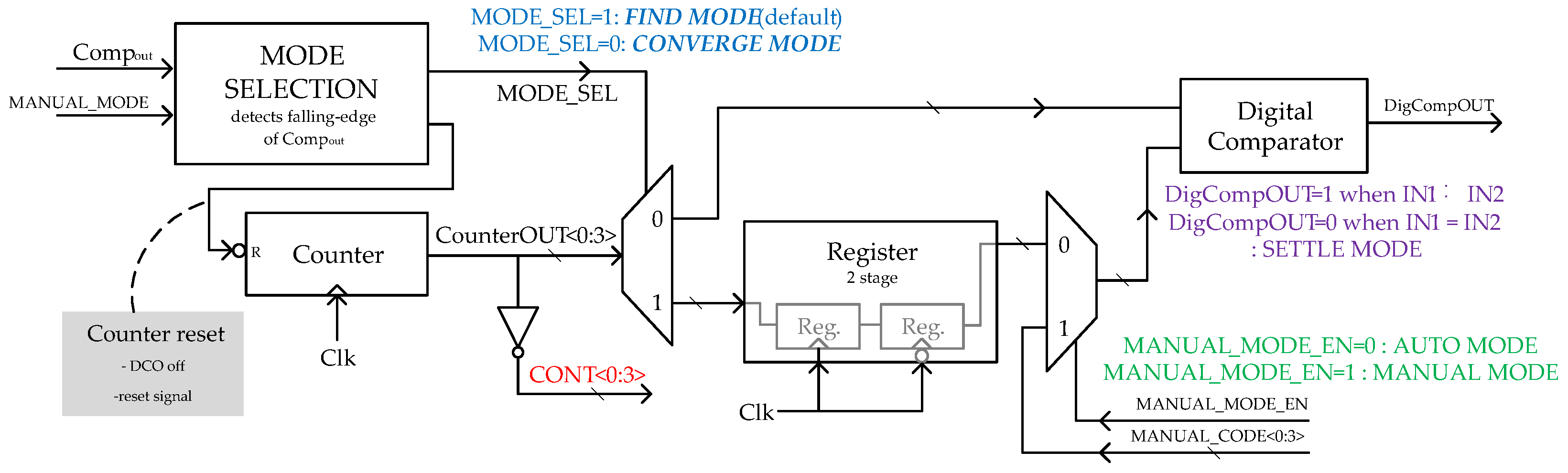
2.2.2. Bias Calibration Algorithm
2.2.3. Detailed Characteristics
- Bias Level Control Method
- VCO OFF Detection
- Manual Mode
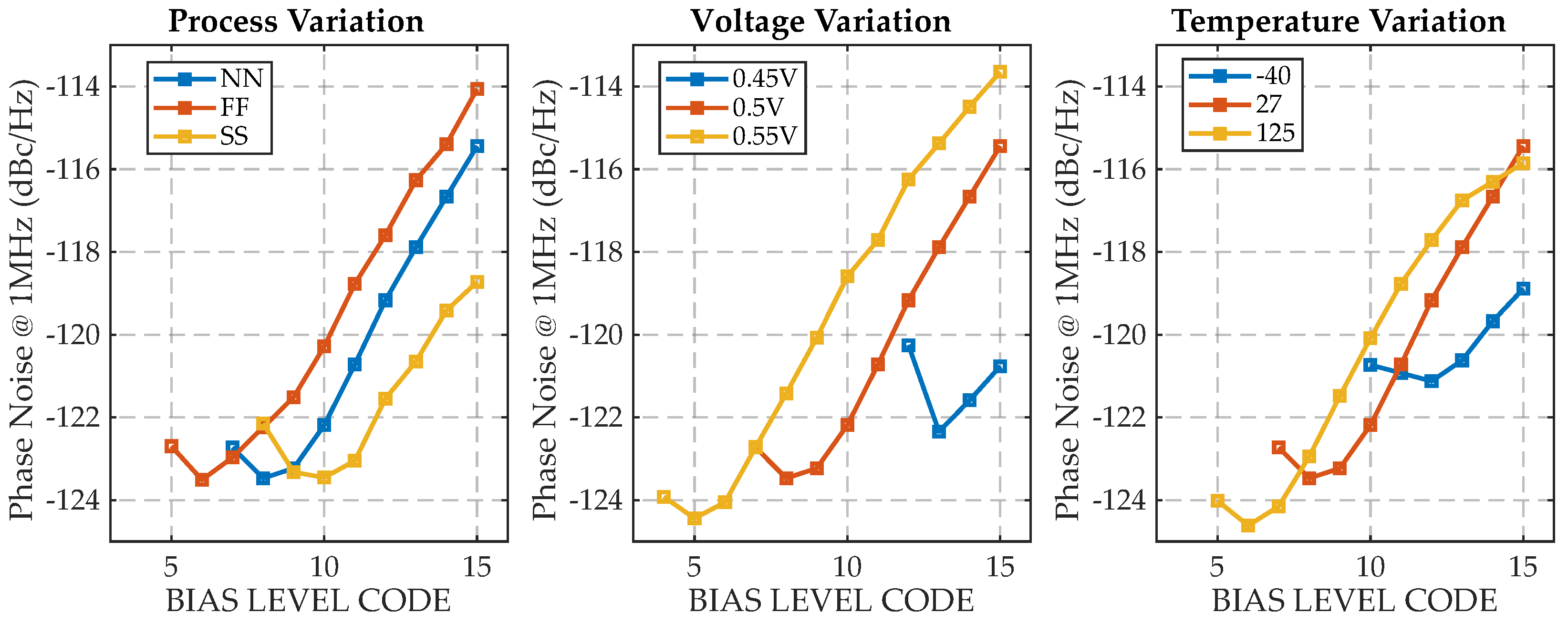
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xie, J.; Vamshi, M.K.; Do, M.A.; Boon, C.C.; Yeo, K.S. A low power low phase noise dual-band multiphase VCO. Microelectron. J. 2012, 43, 1016–1022. [Google Scholar] [CrossRef]
- Fanori, L.; Andreani, P. Highly Efficient Class-C CMOS VCOs, Including a Comparison with Class-B VCOs. IEEE J. Solid-State Circuits 2013, 48, 1730–1740. [Google Scholar] [CrossRef]
- Hu, Y.; Siriburanon, T.; Staszewski, R.B. Intuitive Understanding of Flicker Noise Reduction via Narrowing of Conduction Angle in Voltage-Biased Oscillators. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1962–1966. [Google Scholar] [CrossRef] [Green Version]
- Liao, X.; Liu, L. A Low-Voltage Robust Class-C VCO With Dual Digital Feedback Loops. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2347–2351. [Google Scholar] [CrossRef]
- Mazzanti, A.; Andreani, P. Class-C Harmonic CMOS VCOs, With a General Result on Phase Noise. IEEE J. Solid-State Circuits 2008, 43, 2716–2729. [Google Scholar] [CrossRef]
- Tohidian, M.; Fotowat-Ahmadi, A.; Kamarei, M.; Ndagijimana, F. High-swing class-C VCO. In Proceedings of the 2011 Proceedings of the ESSCIRC (ESSCIRC), Helsinki, Finland, 12–16 September 2011; pp. 495–498. [Google Scholar] [CrossRef]
- Xu, X.; Yang, X.; Yoshimasu, T. 2.4-GHz band low-voltage class-C PMOS VCO IC with amplitude feedback loop. In Proceedings of the 2015 Asia-Pacific Microwave Conference (APMC), Nanjing, China, 6–9 December 2015; Volume 3, pp. 1–3. [Google Scholar] [CrossRef]
- Yang, X.; Xu, X.; Yoshimasu, T. An ultra-low-voltage Class-C PMOS VCO IC with PVT compensation in 180-nm CMOS. In Proceedings of the 2016 IEEE 16th Topical Meeting on Silicon Monolithic Integrated Circuits in RF Systems (SiRF), Austin, TX, USA, 24–27 January 2016; pp. 107–109. [Google Scholar]
- Zhu, Z.; Liang, L.; Yang, Y. A Startup Robust Feedback Class-C VCO With Constant Amplitude Control in 0.18 μm CMOS. IEEE Microw. Wirel. Compon. Lett. 2015, 25, 541–543. [Google Scholar] [CrossRef]
- Zhang, Y.; Boon, C.C.; Miao, Y.; Do, M.A.; Yeo, K.S. Novel hybrid type Automatic Amplitude Control loop VCO. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 356–359. [Google Scholar] [CrossRef]
- Jia, L.; Ma, J.G.; Yeo, K.S.; Yu, X.P.; Do, M.A.; Lim, W.M. A 1.8-V 2.4/5.15-GHz dual-band LCVCO in 0.18-μm CMOS technology. IEEE Microw. Wirel. Compon. Lett. 2006, 16, 194–196. [Google Scholar] [CrossRef]
- Chen, J.; Jonsson, F.; Carlsson, M.; Hedenas, C.; Zheng, L.R. A Low Power, Startup Ensured and Constant Amplitude Class-C VCO in 0.18 μm CMOS. IEEE Microw. Wirel. Compon. Lett. 2011, 21, 427–429. [Google Scholar] [CrossRef]
- Deng, W.; Okada, K.; Matsuzawa, A. Class-C VCO With Amplitude Feedback Loop for Robust Start-Up and Enhanced Oscillation Swing. IEEE J. Solid-State Circuits 2013, 48, 429–440. [Google Scholar] [CrossRef]
- Murphy, D.; Darabi, H.; Wu, H. Implicit Common-Mode Resonance in LC Oscillators. IEEE J. Solid-State Circuits 2017, 52, 812–821. [Google Scholar] [CrossRef]
- Hajimiri, A.; Lee, T. A general theory of phase noise in electrical oscillators. IEEE J. Solid-State Circuits 1998, 33, 179–194. [Google Scholar] [CrossRef] [Green Version]
- Perticaroli, S.; Dal Toso, S.; Palma, F. A Harmonic Class-C CMOS VCO-Based on Low Frequency Feedback Loop: Theoretical Analysis and Experimental Results. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 2537–2549. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed | [4] | [12] | [13] | [8] | [9] | |
|---|---|---|---|---|---|---|
| Calibration Method | Digital | Digital | Digital | Analog | Analog | Analog |
| External reference voltages | X | O | O | O | O | O |
| Number of calibration loops | 1 | 2 | 1 | 1 | 1 | 2 |
| Optimal phase noise tracking | O | X | X | X | X | X |
| Proposed * | [16] | [12] | [14] | [6] | [2] | [11] | |
|---|---|---|---|---|---|---|---|
| Tech. | 28 nm | 55 nm | 180 nm | 28 nm | 180 nm | 90 nm | 180 nm |
| Config. | Class-C | Class-C | Class-C | Class-B | Class-C | Class-C | Class-B |
| Supply Voltage (V) | 0.5 | 1.5 | 1.0 | 0.9 | 1.2 | 1.2 | 1.5 |
| Tuning Range (GHz) | 3.717–4.675 | 6.5–7.8 | 2.6–3.1 | 2.85–3.75 | 4.84 (N.A.) | 3.4–4.5 | 2.2–2.85 /4.4–5.7 |
| TR(%) | 22.8 | 18.2 | 20 | 27.3 | N.A. ** | 28 | 25.7/25.7 |
| Phase Noise @1 MHz (dBc/Hz) | −124.1 | −127 | −123.0 | −131 | −125 | −127 *** | −110 ***/ −97 *** |
(dBc/Hz) | −192.2@1 MHz −205.3@5 MHz | −187 @1 MHz | −191.1 @1 MHz | −192 @5 MHz | −193 @1 MHz | −191 @1 MHz | −188.3 /−183.7 @3 MHz |
(dBc/Hz) | −199.4@1 MHz −212.5@5 MHz | −192.2 @1 MHz | −197.1 @1 MHz | −200.7 @5 MHz | N.A. ** | −199.9 @5 MHz | −196.5 /−191.9 @3 MHz |
| (mW) | 2.135–1.966 | 18 | 1.57 | 6.6 | 3.4 | 6.6 | 5.4/8 |
| Area (mm) | 0.196 | 0.459 | 0.77 | 0.19 | 0.147 | 0.08 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, G.; Seong, S.; Lee, M. A PVT-Insensitive Optimal Phase Noise Point Tracking Bias Calibration in Class-C VCO. Electronics 2022, 11, 629. https://doi.org/10.3390/electronics11040629
Jung G, Seong S, Lee M. A PVT-Insensitive Optimal Phase Noise Point Tracking Bias Calibration in Class-C VCO. Electronics. 2022; 11(4):629. https://doi.org/10.3390/electronics11040629
Chicago/Turabian StyleJung, Gaim, Siheon Seong, and Minjae Lee. 2022. "A PVT-Insensitive Optimal Phase Noise Point Tracking Bias Calibration in Class-C VCO" Electronics 11, no. 4: 629. https://doi.org/10.3390/electronics11040629
APA StyleJung, G., Seong, S., & Lee, M. (2022). A PVT-Insensitive Optimal Phase Noise Point Tracking Bias Calibration in Class-C VCO. Electronics, 11(4), 629. https://doi.org/10.3390/electronics11040629