
Improvement of UAV Tracking Technology in Future 6G Complex Environment Based on GM-PHD Filter



Abstract
:1. Introduction
1.1. Background
1.2. Related Work
1.2.1. UAV Management
1.2.2. Target Tracking
2. System Model
2.1. Multi-Target Bayes Filtering
2.2. Traditional GM-PHD Filter
2.2.1. Prior Hypothesis
2.2.2. Forecast Update
2.2.3. Trim and Estimate
3. The Improved DGM-PHD Filter Based Method
3.1. New UAV Target Intensity Estimation Algorithm
3.2. Target Trajectory Extraction Algorithm
3.3. Out-of-Line Detection Algorithm
4. Simulation Results
4.1. Simulation Model Establishment
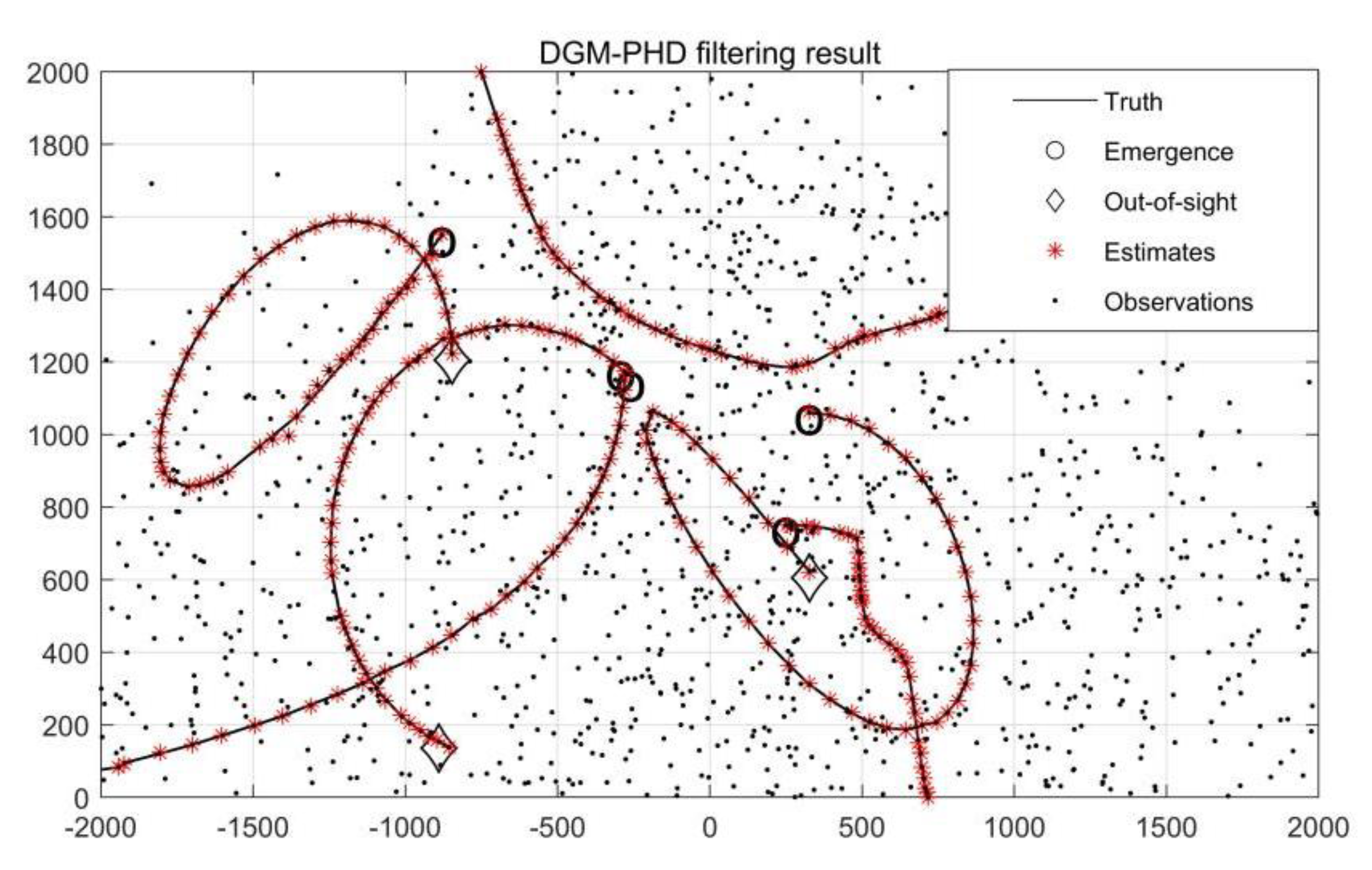
4.2. Simulation Experiment Results
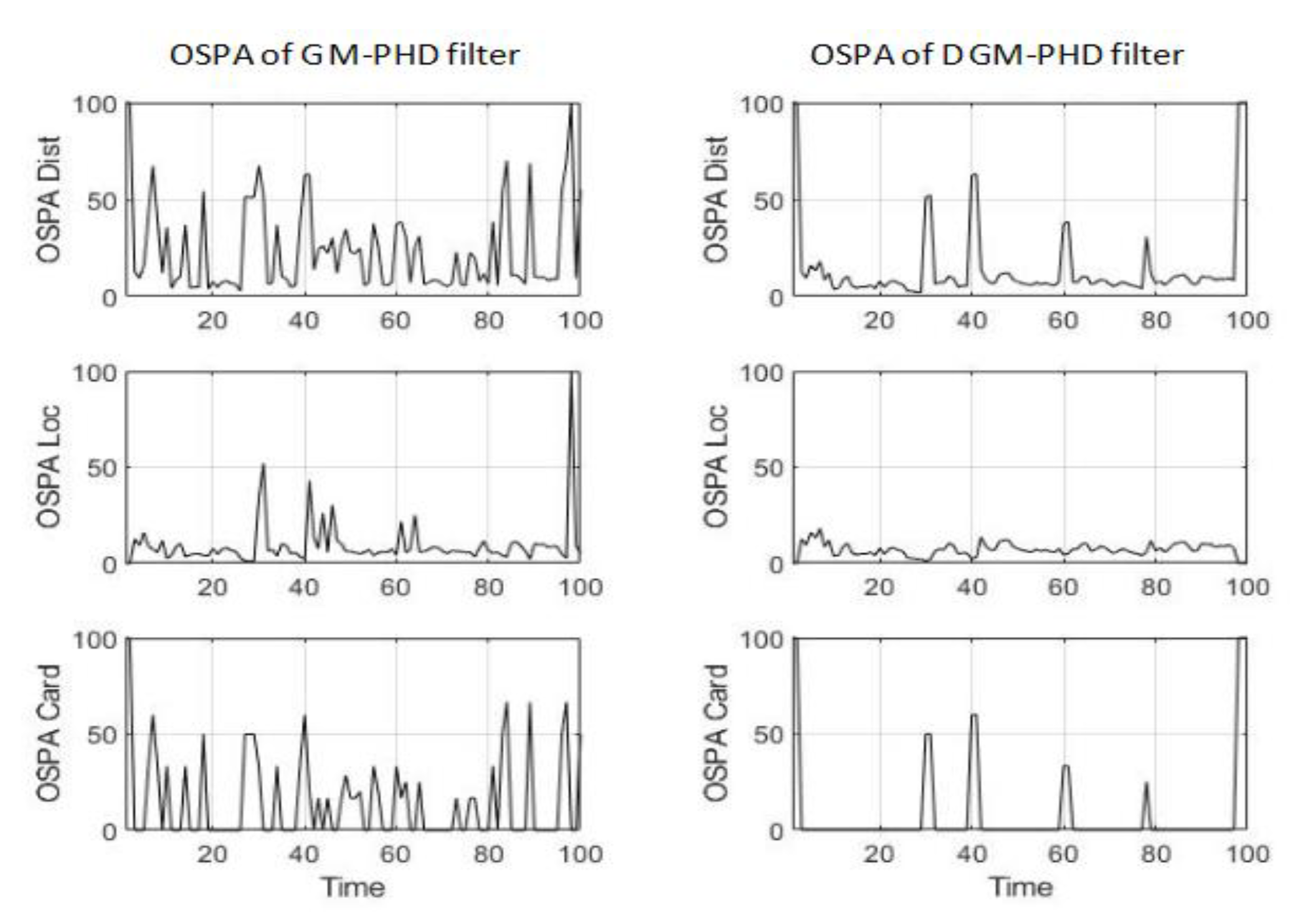
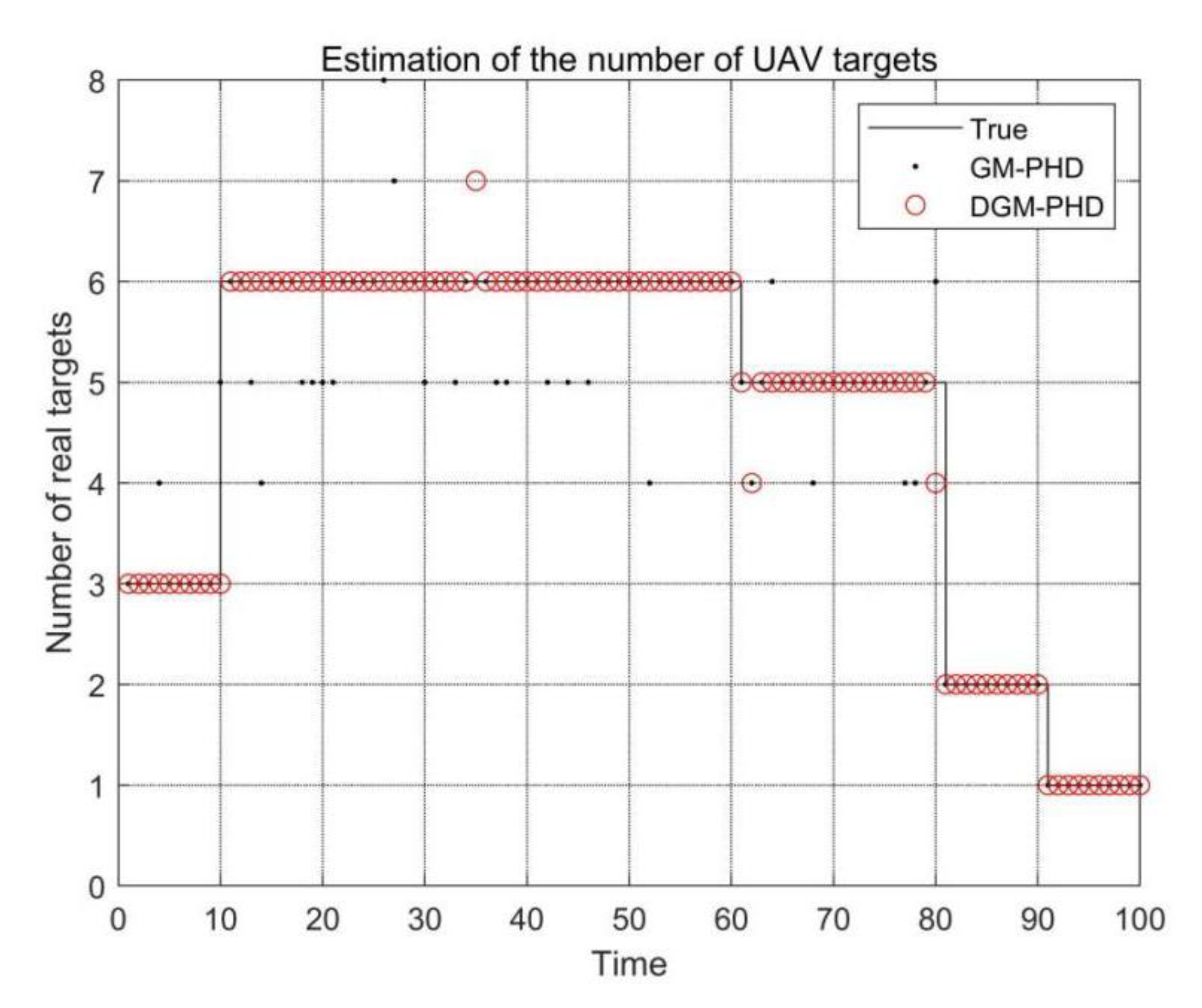
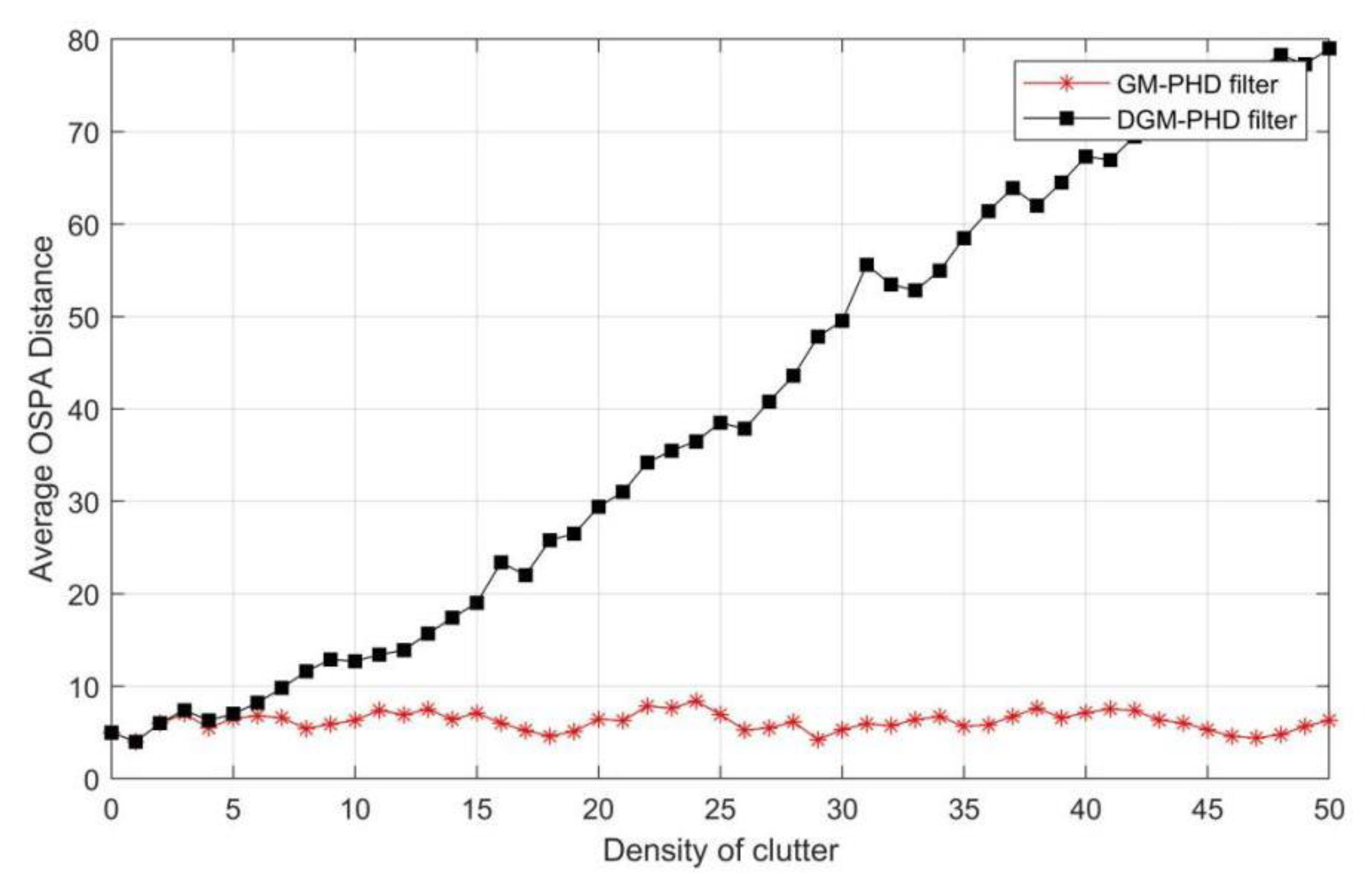
4.3. Performance Comparison and Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mishra, D.; Trotta, A.; Traversi, E.; Di Felice, M.; Natalizio, E. Cooperative Cellular UAV-to-Everything (C-U2X) communication based on 5G sidelink for UAV swarms. Comput. Commun. 2022, 192, 173–184. [Google Scholar] [CrossRef]
- Kaur, J.; Khan, M.A. Sixth Generation (6G) Wireless Technology: An Overview, Vision, Challenges and Use Cases. In Proceedings of the 2022 IEEE Region 10 Symposium (TENSYMP), Mumbai, India, 1–3 July 2022. [Google Scholar]
- Cohari, A.; Ahmad, A.B.; Rahim, R.B.A.; Supa’at, A.S.M.; Abd Razak, S.; Gismalla, M.S.M. Involvement of Surveillance Drones in Smart Cities: A Systematic Review. IEEE Access 2022, 10, 56611–56628. [Google Scholar]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover Management of Drones in Future Mobile Networks: 6G Technologies. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Burhanuddin, L.A.B.; Liu, X.N.; Deng, Y.S.; Challita, U.; Zahemszky, A. QoE Optimization for Live Video Streaming in UAV-to-UAV Communications via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2022, 71, 5358–5370. [Google Scholar] [CrossRef]
- Dai, H.-N.; Wu, Y.; Imran, M.; Nasser, N. Integration of Blockchain and Network Softwarization for Space-Air-Ground-Sea Integrated Networks. IEEE Internet Things Mag. 2022, 5, 166–172. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N.; Tanwar, S. Blockchain-Envisioned UAV Communication Using 6G Networks: Open Issues, Use Cases, and Future Directions. IEEE Internet Things J. 2021, 8, 5416–5441. [Google Scholar] [CrossRef]
- Masaracchia, A. UAV-Enabled Ultra-Reliable Low-Latency Communications for 6G: A Comprehensive Survey. IEEE Access 2021, 9, 137338–137352. [Google Scholar] [CrossRef]
- Mozaffari, M.; Lin, X.; Hayes, S. Toward 6G with Connected Sky: UAVs and Beyond. IEEE Commun. Mag. 2021, 59, 74–80. [Google Scholar] [CrossRef]
- Dong, C. UAVs as an Intelligent Service: Boosting Edge Intelligence for Air-Ground Integrated Networks. IEEE Netw. 2021, 35, 167–175. [Google Scholar] [CrossRef]
- New, W.K.; Leow, C.Y. Unmanned Aerial Vehicle (UAV) in Future Communication System. In Proceedings of the 2021 26th IEEE Asia-Pacific Conference on Communications (APCC), Kuala Lumpur, Malaysia, 11–13 October 2021. [Google Scholar]
- Zawish, M. Toward On-Device AI and Blockchain for 6G-Enabled Agricultural Supply Chain Management. IEEE Internet Things Mag. 2022, 5, 160–166. [Google Scholar] [CrossRef]
- Zuhair, M.; Patel, F.; Navapara, D.; Bhattacharya, P.; Saraswat, D. BloCoV6: A blockchain-based 6G-assisted UAV contact tracing scheme for COVID-19 pandemic. In Proceedings of the 2021 2nd International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 28–30 April 2021. [Google Scholar]
- Giray, S.M. Anatomy of unmanned aerial vehicle hijacking with signal spoofing. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 12–14 June 2013. [Google Scholar]
- Kumar, C.; Mohanty, S. Current Trends in Cyber Security for Drones. In Proceedings of the 2021 International Carnahan Conference on Security Technology (ICCST), Hatfield, UK, 11–15 October 2021. [Google Scholar]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G Enabled Unmanned Aerial Vehicle Traffic Management: A Perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Mujumdar, O.; Celebi, H.; Guvenc, I.; Sichitiu, M.; Hwang, S.; Kang, K.-M. Use of LoRa for UAV Remote ID with Multi-User Interference and Different Spreading Factors. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021.
- Craye, C.; Ardjoune, S. Spatio-Temporal semantic segmentation for drone detection. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019. [Google Scholar]
- Anwar, M.Z.; Kaleem, Z.; Jamalipour, A. Machine learning inspired sound-based amateur drone detection for public safety applications. IEEE Trans. Veh. Technol. 2019, 68, 2526–2534. [Google Scholar] [CrossRef]
- Liu, Y.C.; Liao, L.C.; Wu, H. Trajectory and image-based detection and identification of UAV. Visual Comput. 2021, 37, 1769–1780. [Google Scholar] [CrossRef]
- Mohajerin, N.; Histon, J.; Dizaji, R.; Waslander, S.L. Feature extraction and radar track classification for detecting UAVs in civillian airspace. In Proceedings of the 2014 IEEE Radar Conference (RadarCon), Cincinnati, OH, USA, 19–23 May 2014. [Google Scholar]
- Sarikaya, T.B.; Yumus, D.; Efe, M.; Soysal, G.; Kirubarajan, T. Track Based UAV Classification Using Surveillance Radars. In Proceedings of the 2019 22nd International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019. [Google Scholar]
- Houles, A.; Bar-Shalom, Y. Multi-sensor tracking of a maneuvering target in clutter. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 176–189. [Google Scholar] [CrossRef]
- Blom, H.A.; Blom, E.A. Interacting multiple model joint probabilistic data association avoiding track coalescence. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002. [Google Scholar]
- Blackmans. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electro. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Global integrated data fusion. In Proceedings of the 7th National Symposium on Sensor Fusion, Albuquerque, NM, USA, 29 July 1994. [Google Scholar]
- Mahler, R.P.S. Multi-target Bayes filtering via first-order multi-target moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Lee, J.-Y.; Kim, W.; Kim, H.J. Tracking of Multiple Targets using GM-PHD Filter with Nonlinear Measurement Model. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Republic of Korea, 17–20 October 2018. [Google Scholar]
- Wang, H.; Liang, Y.; Jiang, H.; Li, Q.; Ren, Z. Multi-target GM-PHD trackers based on strong tracking cubature Kalman filter. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Gallion, T.; McKinney, C.; Chakravarty, S. Pedestrian Tracker Utilizing Sensor Fusion and a Gaussian-Mixture Probability Hypothesis Density Filter. In Proceedings of the 2019 SoutheastCon, Huntsville, AL, USA, 11–14 April 2019. [Google Scholar]
- Martínez, F.; Frías, M.P.; P’erez, M.D.; Rivera, A.J. A methodology for applying k-nearest neighbor to time series forecasting. Artif. Intell. Rev. 2019, 52, 2019–2037. [Google Scholar] [CrossRef]
- Qi, J.; Yu, Y.; Wang, L.; Liu, J. K-Means: An Effective and Efficient K-Means Clustering Algorithm. In Proceedings of the 2016 IEEE International Conferences on Big Data and Cloud Computing (BDCloud), Social Computing and Networking (SocialCom), Sustainable Computing and Communications (SustainCom) (BDCloud-SocialCom-SustainCom), Atlanta, GA, USA, 8–10 October 2016. [Google Scholar]
- Beard, M.; Vo, B.T.; Vo, B.N. OSPA ((2)): Using the OSPA Metric to Evaluate Multi-target Tracking Performance. In Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 31 October–3 November 2017. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Physical Meaning | Setting Value |
| Two-dimensional monitoring range | ||
| Radar scan period | 1 | |
| Monitoring time | 100 | |
| Process noise | ||
| Observation noise | ||
| Target survival probability | 0.98 | |
| Target detection probability | 0.98 | |
| Maximum movement speed of UAV | ||
| Minimum movement speed of UAV | ||
| Maximum movement acceleration of UAV | ||
| Poisson clutter intensity | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, T.; Zhou, C.; Kadoch, M.; Tang, T.; Zuo, Z. Improvement of UAV Tracking Technology in Future 6G Complex Environment Based on GM-PHD Filter. Electronics 2022, 11, 4140. https://doi.org/10.3390/electronics11244140
Hong T, Zhou C, Kadoch M, Tang T, Zuo Z. Improvement of UAV Tracking Technology in Future 6G Complex Environment Based on GM-PHD Filter. Electronics. 2022; 11(24):4140. https://doi.org/10.3390/electronics11244140
Chicago/Turabian StyleHong, Tao, Chunying Zhou, Michel Kadoch, Tao Tang, and Zhengfa Zuo. 2022. "Improvement of UAV Tracking Technology in Future 6G Complex Environment Based on GM-PHD Filter" Electronics 11, no. 24: 4140. https://doi.org/10.3390/electronics11244140
APA StyleHong, T., Zhou, C., Kadoch, M., Tang, T., & Zuo, Z. (2022). Improvement of UAV Tracking Technology in Future 6G Complex Environment Based on GM-PHD Filter. Electronics, 11(24), 4140. https://doi.org/10.3390/electronics11244140