1. Introduction
Swarm-based intelligent algorithms have been developed to address complicated nonlinear optimization problems more and more in recent years. The reason for this is that there is a variety of optimization problems in engineering which are difficult to be solved effectively in a limited time using traditional optimization methods, and hence it has been one of important research hotspots. Swarm intelligent (SI) algorithms are stochastic search methods which can deal with optimization issues successfully. SI algorithms are designed based on natural occurrences and have been proved to be more excellent in addressing optimization issues than standard algorithms in many cases such as particle swarm algorithm (PSO) [
1] developed via mimicking the motion behavior of birds, artificial bee swarm algorithm (ABC) [
2] developed based on the forging of bees, ant colony algorithm [
3] developed on the basis of the motion of ants and beetle swarm algorithm created based on the movement of beetle swarm.
Beetle swarm optimization (BSO) [
4] is a novel swarm intelligent algorithm based on beetle group behavior. Some studies demonstrate that it performs better than previous intelligence algorithms in accuracy and convergence speed. Hence it is a very successful algorithm for addressing optimization problems. Moreover, the algorithm has been widely used in the optimization problems of various disciplines. For example, Wang et al. [
5] put forward the improved BSO algorithm based on new trajectory planning and used the algorithm for trajectory planning of robot manipulators. Hariharan et al. [
6] mixed PSO and BSO algorithms to propose an adaptive BSO algorithm and applied it to improve BSO algorithm to solve the energy-efficient multi-objective virtual machine integration. Since the search strategy of BSO algorithm is better than PSO algorithm, Mu et al. [
7] applied it on top of 3D route planning. Singh et al. [
8] combined BSO algorithm to propose a heart disease and multi morbidity diagnosis model. Jiang et al. [
9] utilized the efficiency of BSO algorithm to localize and quantify structural damage. Zhou et al. [
10] put forward an improved BSO algorithm to obtain the shortest path and implementing intelligent navigation control for autonomous navigation robots. Zhang et al. [
11] proposed a novel gait multi-objectives optimization strategy based on beetle swarm optimization to solve the lower limb exoskeleton robot.
However, the BSO algorithm still has some drawbacks. When a beetle falls into a local optimal solution, other beetles can gather to the beetle. It tends to make the algorithm skip the global optimal solution, and thus sinks into a local optimal solution. This study proposes a novel improved opposition-based learning method which is more suitable for swarm intelligence algorithms, and it is illustrated in detail in the subsequent
Section 3.1 of the study. The original opposition-based learning [
12] is an effective intelligent optimization strategy with extensive practical applications, such as the improved particle swarm algorithm [
13] that uses opposition-based learning. However, the optimization performance of the opposition-based learning strategy is not so good in the later phase of iterations, so that some variations of the opposition-based learning algorithm have emerged such as the refraction opposition-based learning model based on refraction principle [
14] and the elite opposition-based learning [
15,
16,
17].
Therefore, in this study, a novel opposition-based learning method is proposed to enhance the performance of the original opposition-based learning. In addition, an adaptive strategy is proposed to achieve a better balance on the selection between the BSO algorithm and particle swarm algorithm to enhance its optimization. In the future, the proposed algorithm can be used to solve engineering problems to verify its performance, such as a robust fuzzy control approach for path-following control of autonomous vehicles [
18].
The remainder of the study is constructed as below. Firstly,
Section 2 demonstrates the related work of this study including the beetle swarm algorithm and the opposition-based learning. After that, the design of the NOBBSO algorithm is presented in
Section 3, which includes the utilization of the opposition-based learning in the algorithm and an adaptive strategy is proposed.
Section 4 analyzes the experiments, including parameter settings and test functions and convergence analysis.
Section 5 discusses the merits and demerits of the NOBBSO algorithm. Finally, a summary is presented in
Section 6.
3. The Proposed Algorithm Design
3.1. Novel Opposition-Based Learning
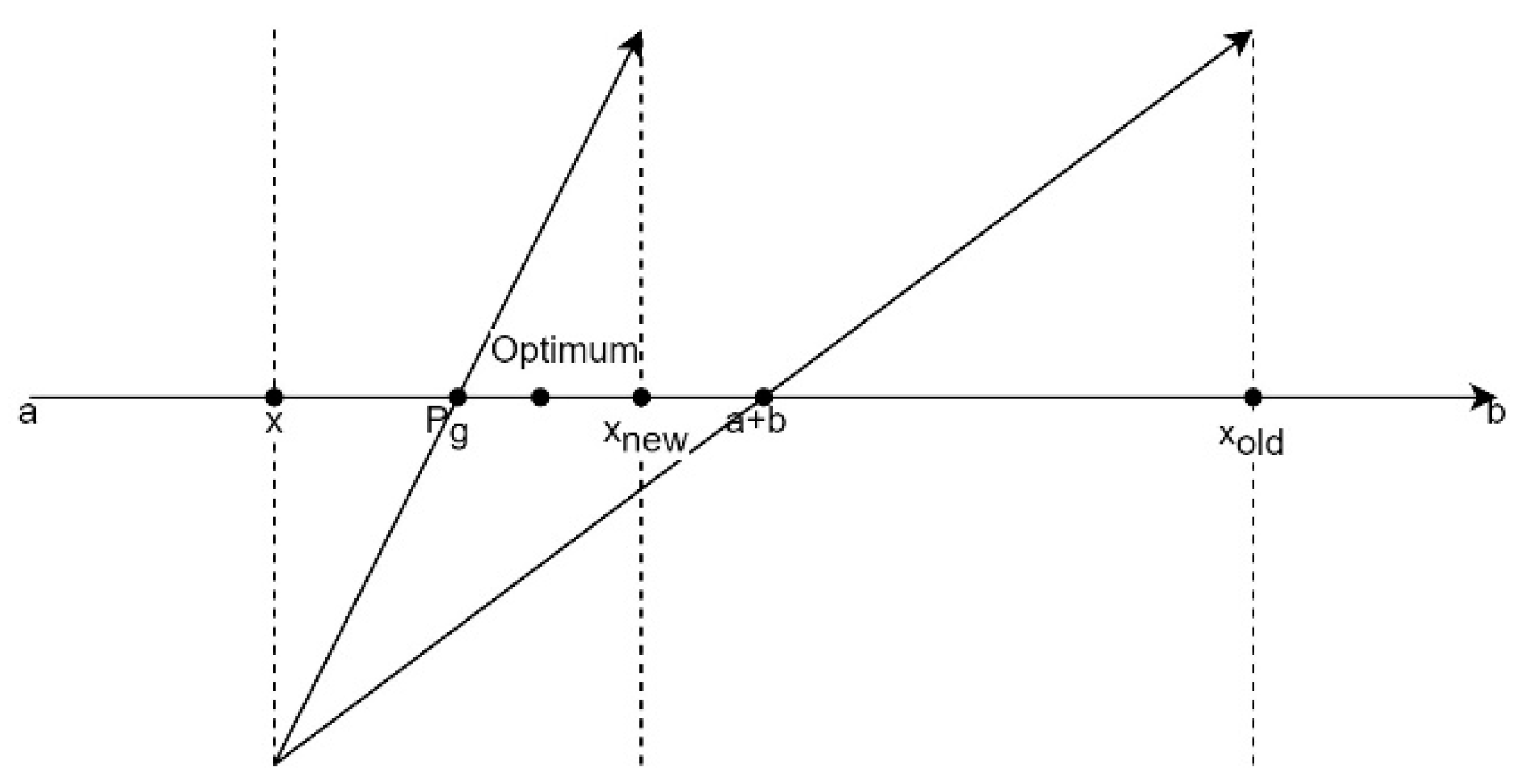
The opposition-based learning can produce a better solution for the searched solution, but these better solutions may be dispersed by the opposition-based learning at this point, which prevents the algorithm from finding the optimal solution in later iterations because most of beetles would gather at a point.
The opposition-based learning can be described as follows. New opposite solutions are obtained from current solutions by the way of symmetry at the middle point when the opposition-based learning formula is embodied in coordinates as
Figure 1. In a search area, opposition-based learning is employed to make a new solution.
Next the novel opposition-based learning is put forward. Beetle individuals have the best location information (the optimal individual) in the BSO algorithm. Therefore, in the novel opposition-based learning process, the new solution is generated by a method similar to opposition-based learning. However, the difference between them is that the new solution in the novel opposition-based learning comes from the best location information (the optimal individual), not the middle point. In this method, when the current solution is far away from the optimal area, the new solution generated by this strategy can have a greater probability to be closer to the optimal solution to accelerate the convergence speed. Furthermore, because most beetles have already been near to the present optimal position in the later stages of iteration, the new solution obtained by continuing performing the novel opposition-based learning will not be far from the current optimal location.
The enhanced opposition-based learning formula can be defined as the following Equation (12) using the BSO algorithm.
where the term
denotes the optimal solution of all current individuals,
denotes that the optimal solution of the current individual and
denotes a newly generated optimal solution.
When the beetle swarm algorithm calculates a solution every time, the Equation (12) is employed to calculate a new solution to enhance population diversity.
3.2. The Adaptive Strategy
The displacement in the original BSO algorithm is weighted by the parameter , as can be seen from displacement formula (seen from Equation (7)). However, there is a key point here in that the value of is always a constant value, which results in a problem that beetles do not show greater group behavior that generated by randomly distribution in various positions in the searching space in the early stages of iteration. The group behavior allows them to swiftly gather to the optimal beetle, and most beetles will congregate near the optimal solution. At this moment, beetles should exhibit more individual behavior, so that instead of constantly traveling toward the current optimal beetle, they move according to individual behavior, which allows them to swiftly locate the optimal solution.
Therefore, based on the above idea, the formula for calculating
can be defined as the following Equation (13):
where
is the number of the current iteration, and
is the number of the maximum iteration.
3.3. Description of the Designed Algorithm
The performing process of the BSO algorithm is described as the following Algorithm 1:
| Algorithm 1: BSO |
| S1: Initialize the beetle Xi, and population velocity v; |
| S2: Set step size, speed boundary, population size and maximum iteration and so on; |
| S3: The fitness of beetles is calculated; |
| S4: While (t <= T) |
| S5: Equation (9) is used to calculate the weight w; |
| S6: Update d using the Equation (6); |
| S7: For every single beetle |
| S8: Equations (2) and (3) are used to obtain the positions of left and right antennas of beetles, respectively; |
| S9: Equation (10) is used to calculate the increment of the movement |
| S10: Equation (8) is used to update beetle velocity V; |
| S11: Use the Equation (7) to update the beetle position; |
| S12: End for |
| S13: The fitness of each beetle is computed; |
| S14: Record and store the current location of the beetle; |
| S15 t = t + 1; |
| S16: End while |
The performing process of the NOBBSO algorithm is described as the following Algorithm 2:
| Algorithm 2: NOBBSO |
| S1: Initialize the beetle Xi, and population velocity v; |
| S2: Set step size, speed boundary, population size and maximum iteration and so on; |
| S3: The fitness of beetles is calculated; |
| S4:While (t <= T) |
| S5: Equation (9) is used to calculate the weight w; |
| S6: Update λ using the Equation (13); |
| S7: Update d using the Equation (6); |
| S8: For every single beetle |
| S9: Equations (2) and (3) are used to obtain the positions of left and right antennas of beetles, respectively; |
| S10: Equation (10) is used to calculate the increment of the movement |
| S11: Equation (8) is used to update beetle velocity V; |
| S12: Use the Equation (7) to update the beetle position; |
| S13: Calculate the position of a new beetle using the Equation (12); |
| S14: If the fitness of the new position is less than that of the beetle position |
| S15: Update beetle position with a new beetle position; |
| S16: End if |
| S17: End for |
| S18: The fitness of each beetle is computed; |
| S19: Record and store the current location of the beetle; |
| S20: t = t + 1; |
| S21: End while |
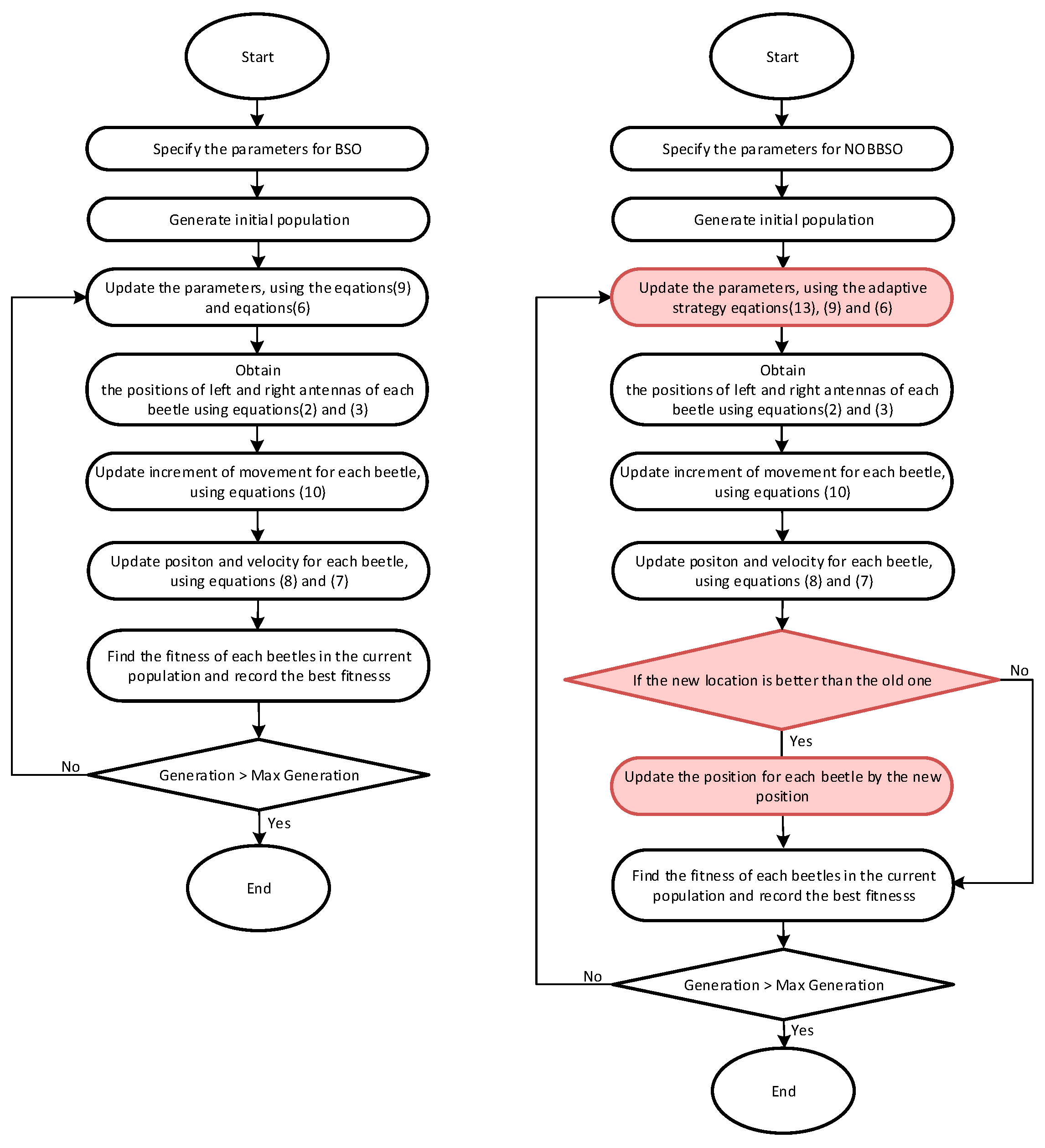
The performing process of the BSO and the NOBBSO algorithm is described as the following
Figure 2:
5. Discussions
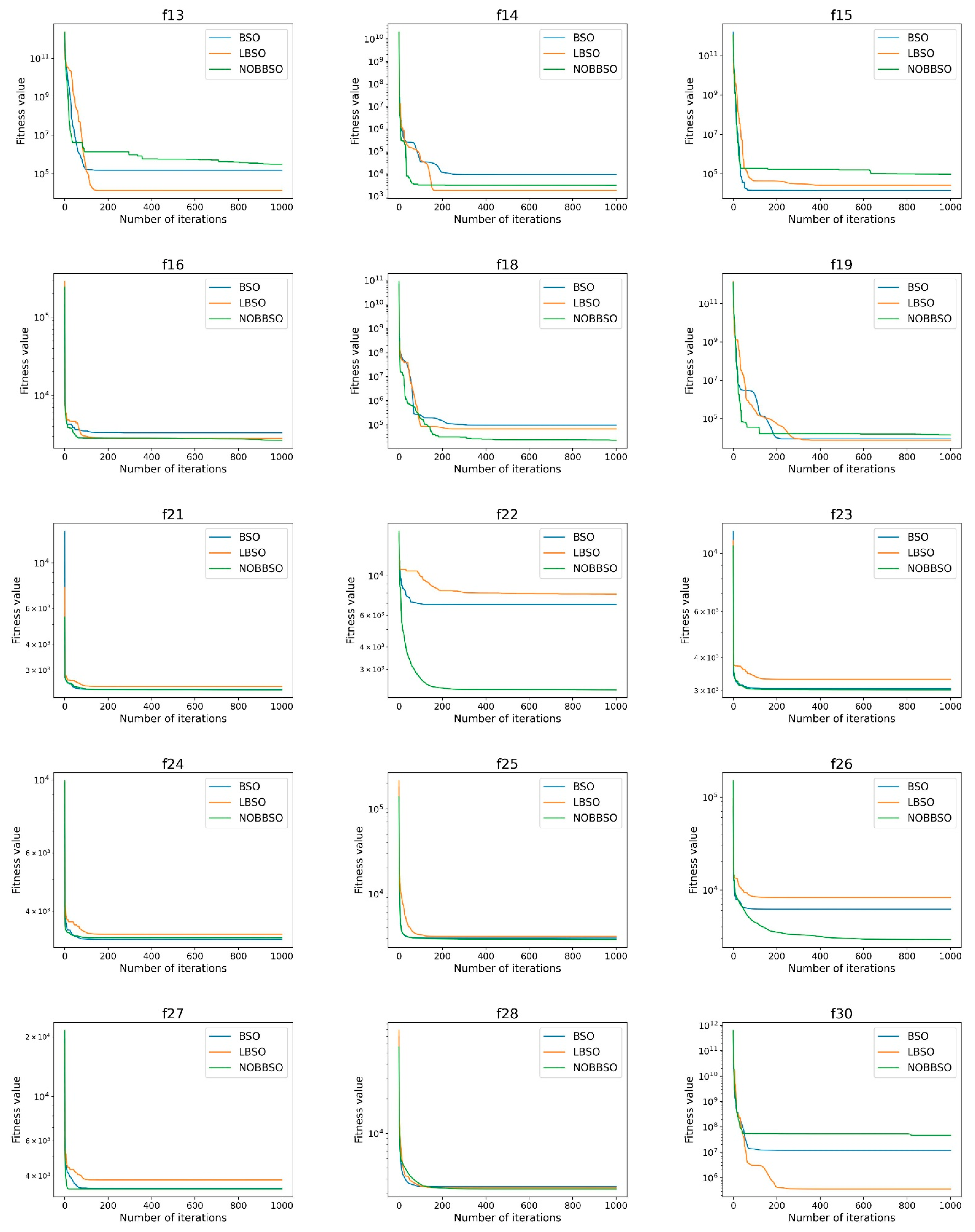
The numerical experiment results demonstrate that the NOBBSO algorithm has higher convergent speed and accuracy in comparison with other competitors.
However, NOBBSO is not a perfect algorithm either because its stability is not very good. For example,
Table 3 shows that the
parameter is continuously changed while the evaluation indicator (Std) does not change much. Therefore, the adaptive strategy is not the main reason for the impact on its stability and the fact reason is mainly from novel opposition-based learning. Because the new solution generated has also certain randomness, which can have an impact on its stability. Moreover, by analyzing
Table 4 and
Table 5, they show that NOBBSO is not much different from the original algorithm in obtaining the optimal solution in dealing with low dimension benchmark functions while NOBBSO is more accurate in obtaining the optimal solution in high dimensions, which demonstrates that the NOBBSO algorithm has advantages in dealing with higher dimensional problems.
From the worse results of few benchmark functions in
Table 4 and
Table 5, NOBBSO still has a certain probability to fall into the local optimal solution, but the probability of falling into a local optimum is actually less than the original algorithm on the whole. Hence it is still worth looking for better strategy or algorithms to improve it.
6. Conclusions
A novel algorithm called adaptive beetle swarm algorithm with novel opposition-based learning is proposed in this study. The algorithm is on the basis of the novel opposition-based learning and adaptive strategy to further enhance the optimization performance of the BSO algorithm. By testing 27 CEC2017 functions, the results show that the proposed NOBBSO algorithm has higher convergence accuracy and convergence speed.
In the future, NOBBSO can still be used in many places, because it is easy to converge and converges quickly. In engineering, there are many complex optimization problems that need to be solved well, but they are not quickly solved by traditional methods. Therefore, NOBBSO can be applied to solve them, which is also the future research work.








{kind=link}
{kind=link}
{kind=link}
{kind=link}