
Distributed Cooperative Jamming with Neighborhood Selection Strategy for Unmanned Aerial Vehicle Swarms


Abstract
:1. Introduction
2. The EA-CA Model
2.1. Mechanism of EA-CA
2.2. The NS–AS Strategy
| Algorithm 1: The NS-AS Strategy Algorithm |
The NS-AS strategy for n agents: 1: Initialize the network topology and , 2: for agent i = 1 to N 3: if the network is not fully connected 4: Adopt the NS steategy 5: Divide the agents into several communication sectors. 6: Calculate the rotation angle set 7: for to m 8: Selects the neighbor agent minargmin, add the agent into candidate set , update ; 9: , add agent ii into candidate set ; 10: Acooording to candidate set , update . 11: end for 12: else 13: Switch to AS strategy 14: Select all agents in the neighborhood, update 15: end for |
3. Signal Model of ECM
4. Simulation Results Analysis
4.1. Performance Analysis of the EA–CA Model
4.1.1. The Number of Communication Sector
4.1.2. The Communication Radius of the Agent
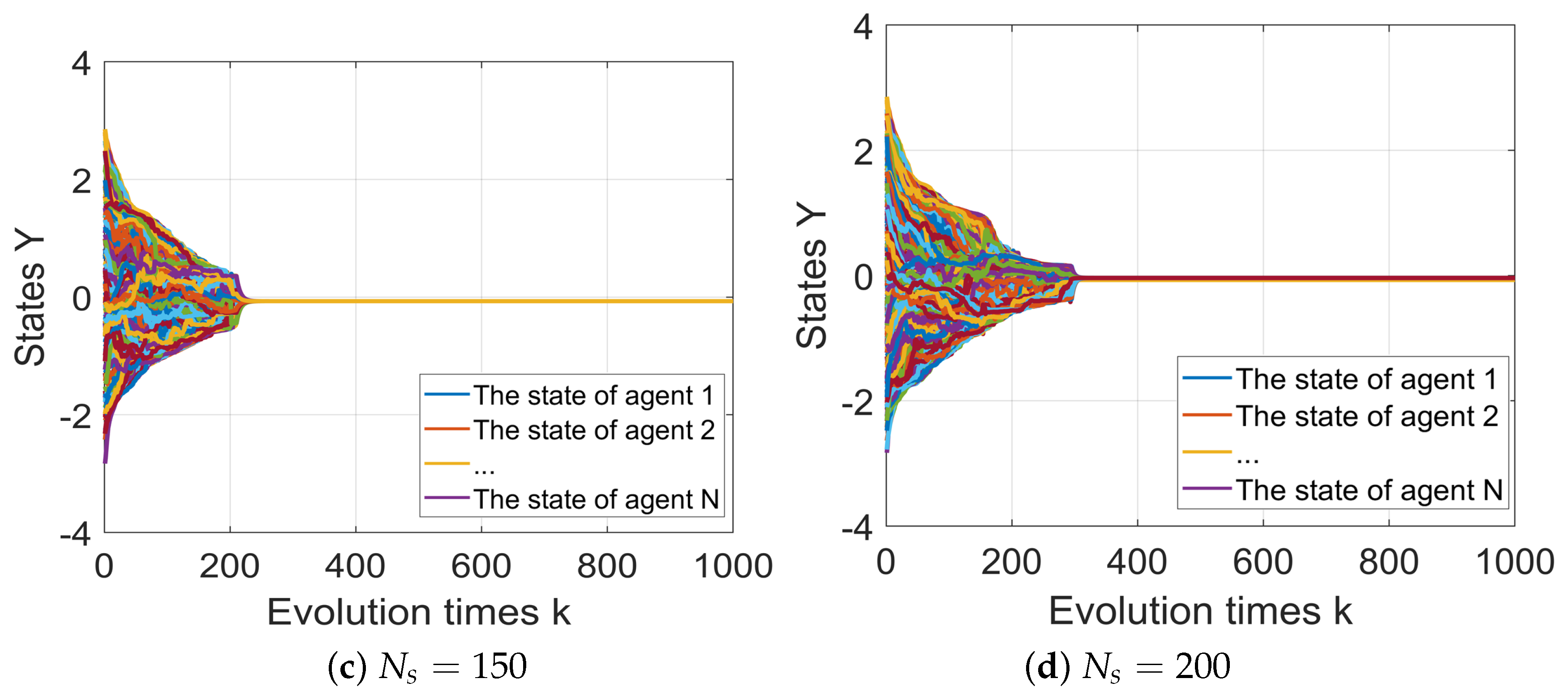
4.1.3. The Number of the Agents
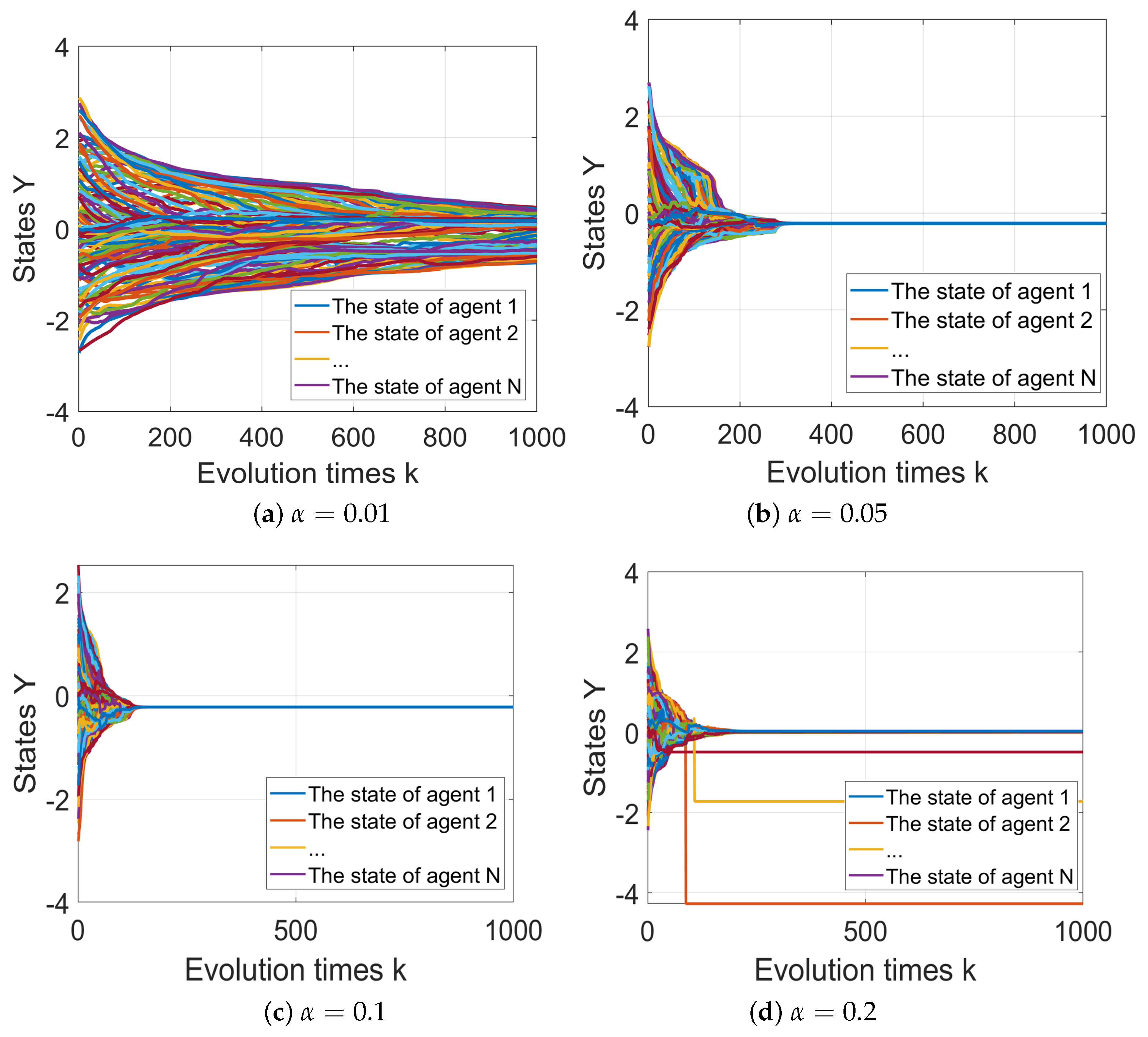
4.1.4. The Adjustment Factor
4.2. ECM Simulation Results
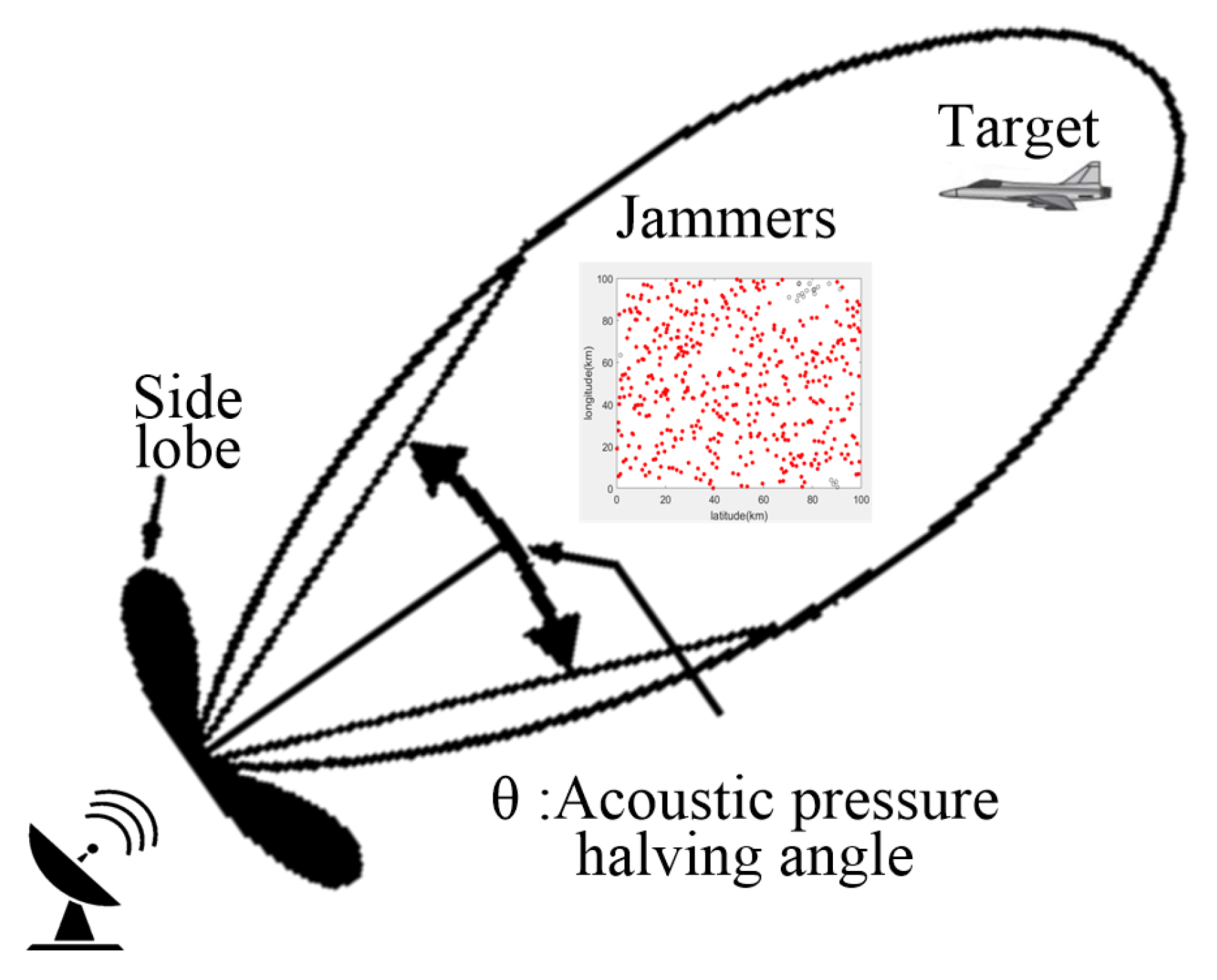
4.2.1. ECM Simulated Scenario
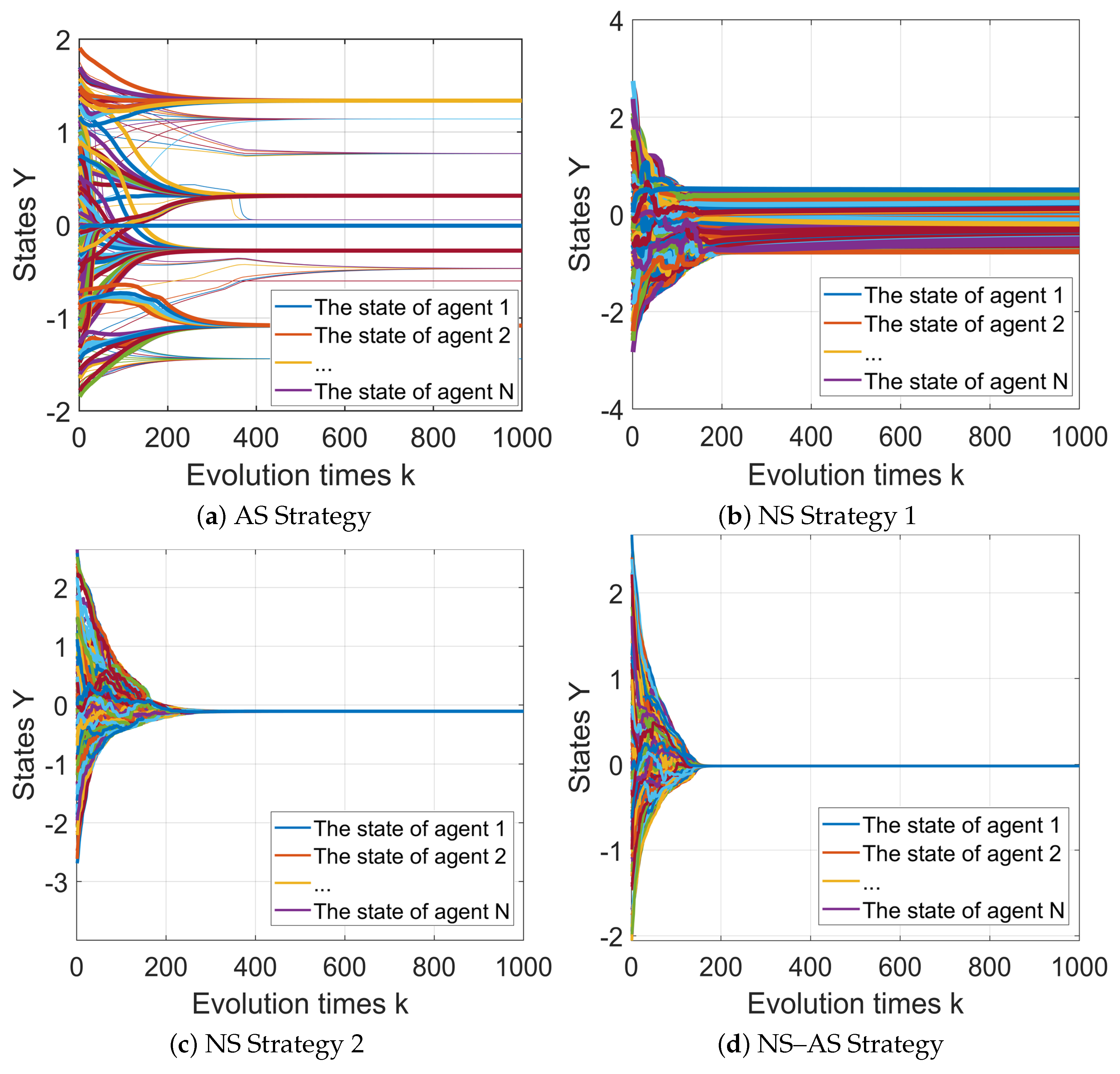
4.2.2. The Performance Analysis of Different Evolution Strategies
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial vehicle |
| LQR | Linear quadratic regulator |
| EA | Electromagnetic agent |
| CA | Cellular automata |
| AS | All selection |
| NS | Neighborhood selection |
| ECM | Electronic countermeasure |
| SNR | Signal–noise ratio |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mathematical Symbol | Definition |
|---|---|
| G | The communication topology diagram of the CA model |
| E | The set of communication edges between members |
| D | The degree matrix |
| The adjacency matrix | |
| L | The Laplacian matrix of the figure G |
| The state of agent i | |
| The candidate set of the agent i | |
| The adjustment factor of the model | |
| The number of agents in each sector | |
| The number of communication sector | |
| The radar receiving power | |
| The radar transmitting power | |
| The gain of the radar transmitting antenna | |
| The gain of the radar antenna in the target direction | |
| The radar cross section | |
| The wavelength of radar signal | |
| The pulse accumulation correction factor | |
| The pulse compression correction factor | |
| R | The distance between radar and target |
| The loss of system | |
| The interference power received by the radar | |
| The jammer transmitting power | |
| The jammer transmitting antenna gain | |
| The comprehensive loss of jammer | |
| The radar center frequency | |
| The pulse width | |
| The chrip bandwidth | |
| The bandwidth of receiver | |
| The bandwidth of jammer | |
| The thermal noise power | |
| The total noise power of the system | |
| The standard room temperature | |
| The noise figure | |
| The false alarm probability | |
| The target detection probability | |
| The minimum detectable signal power |
Appendix B
Appendix B.1. The Clear Air Atmosphere Attenuation
Appendix B.2. Multipath Propagation Factor
References
- Demirhan, M.; Premachandra, C. Development of an automated camera-based drone landing system. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Youn, W.; Ko, H.; Choi, H.; Choi, I.; Myung, H. Collision-free autonomous navigation of a small UAV using low-cost sensors in GPS-denied environments. Int. J. Control. Autom. Syst. 2021, 19, 953–968. [Google Scholar] [CrossRef]
- Shehzad, M.F.; Bilal, A.; Ahmad, H. Position & attitude control of an aerial robot (quadrotor) with intelligent pid and state feedback lqr controller: A comparative approach. In Proceedings of the 2019 16th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 8–12 January 2019; pp. 340–346. [Google Scholar]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent advances and future trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Zhou, L.; Leng, S.; Liu, Q.; Wang, Q. Intelligent UAV swarm cooperation for multiple targets tracking. IEEE Internet Things J. 2021, 9, 743–754. [Google Scholar] [CrossRef]
- Wang, X.; Huang, T.; Liu, Y. Resource allocation for random selection of distributed jammer towards multistatic radar system. IEEE Access 2021, 9, 29048–29055. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, Z. Deception Electronic Countermeasure Applicable to Multiple Jammer Sources in Distributed Multiple-Radar System; IET Radar, Sonar & Navigation: London, UK, 2021. [Google Scholar]
- Zhou, Z.; Rao, B.; Xie, X. The influence mechanism of UAV group on the detection performance of air defense radar. In Proceedings of the 2018 3rd International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 2018), Dalian, China, 12–13 May 2018; Atlantis Press: Beijing, China, 2018; pp. 338–343. [Google Scholar]
- Wang, L.; Liao, Y.; Luan, X. Research on UAV swarm interference based on improved invasive weed optimization algorithm. In International Conference on Artificial Intelligence for Communications and Networks; Springer: Cham, Switzerland, 2019; pp. 35–46. [Google Scholar]
- Cheng, J. Modelling Spatial and Temporal Urban Growth; Utrecht University: Utrecht, The Netherlands, 2003. [Google Scholar]
- Devlin, J.; Schuster, M.D. Probabilistic cellular automata for granular media in video games. Comput. Games J. 2021, 10, 111–120. [Google Scholar] [CrossRef]
- Mardiris, V.; Sirakoulis, G.C.; Mizas, C.; Karafyllidis, I.; Thanailakis, A. A CAD system for modeling and simulation of computer networks using cellular automata. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2008, 38, 253–264. [Google Scholar] [CrossRef]
- Byun, H.; Yu, J. Cellular-automaton-based node scheduling control for wireless sensor networks. IEEE Trans. Veh. Technol. 2014, 63, 3892–3899. [Google Scholar] [CrossRef]
- Packard, N.H.; Wolfram, S. Two-dimensional cellular automata. J. Stat. Phys. 1985, 38, 901–946. [Google Scholar] [CrossRef]
- Xie, G.; Lan, T.; Hu, X.; Li, Y.; Wang, C.D.; Yin, Y. A Distributed consensus protocol based on neighbor selection strategies for multi-agent systems convergence. IEEE Access 2019, 7, 132937–132949. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Ji, X.; Zhang, W.; Chen, S.; Luo, J.; Lu, L.; Yuan, W.; Hu, Z. Speeding up velocity consensus control with small world communication topology for unmanned aerial vehicle Swarms. Electronics 2021, 10, 2547. [Google Scholar] [CrossRef]
- Ahmed, N.; Huang, H. Distributed jammer network: Impact and characterization. In Proceedings of the MILCOM 2009–2009 IEEE Military Communications Conference, Boston, MA, USA, 18–21 October 2009; pp. 1–6. [Google Scholar]
- Wu, Q.; Zhao, F.; Wang, J.; Liu, X.; Xiao, S. Improved ISRJ-based radar target echo cancellation using frequency shifting modulation. Electronics 2019, 8, 46. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Shen, X. A compound interference with distributed interference and false track interference for radar networking. In Proceedings of the 2012 6th Asia-Pacific Conference on Environmental Electromagnetics (CEEM), Shanghai, China, 6–9 November 2012; pp. 318–321. [Google Scholar]
- Wang, F.; Li, H. Joint power allocation for multicarrier radar and communication coexistence. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 141–145. [Google Scholar]
- Zhang, S.; Zhou, Y.; Zhang, L.; Zhang, Q.; Du, L. Target detection for multistatic radar in the presence of deception jamming. IEEE Sens. J. 2021, 21, 8130–8141. [Google Scholar] [CrossRef]




| Parameter | Definition | Value |
|---|---|---|
| The radar center frequency | 3.1 GHz | |
| The pulse width | 20 s | |
| The chirp bandwidth | 30 MHz | |
| The bandwidth of receiver | 100 MHz | |
| The antenna gain of radar in the jammer direction | 38.5 dB | |
| The bandwidth of jammer | 50 MHz | |
| The jammer transmitting power | 3 W | |
| The jammer transmitting antenna gain | 20 dB | |
| The comprehensive loss of jammer | 5 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Song, D.; Ding, B.; Rao, B.; Su, M.; Wang, W. Distributed Cooperative Jamming with Neighborhood Selection Strategy for Unmanned Aerial Vehicle Swarms. Electronics 2022, 11, 184. https://doi.org/10.3390/electronics11020184
Zhou Y, Song D, Ding B, Rao B, Su M, Wang W. Distributed Cooperative Jamming with Neighborhood Selection Strategy for Unmanned Aerial Vehicle Swarms. Electronics. 2022; 11(2):184. https://doi.org/10.3390/electronics11020184
Chicago/Turabian StyleZhou, Yongkun, Dan Song, Bowen Ding, Bin Rao, Man Su, and Wei Wang. 2022. "Distributed Cooperative Jamming with Neighborhood Selection Strategy for Unmanned Aerial Vehicle Swarms" Electronics 11, no. 2: 184. https://doi.org/10.3390/electronics11020184
APA StyleZhou, Y., Song, D., Ding, B., Rao, B., Su, M., & Wang, W. (2022). Distributed Cooperative Jamming with Neighborhood Selection Strategy for Unmanned Aerial Vehicle Swarms. Electronics, 11(2), 184. https://doi.org/10.3390/electronics11020184