
A Vehicle Lateral Motion Control Based on Tire Cornering Stiffness Estimation Using In-Wheel Motors


Abstract
:1. Introduction
1.1. Literature Review
1.2. Contributions
1.3. Contents of Paper
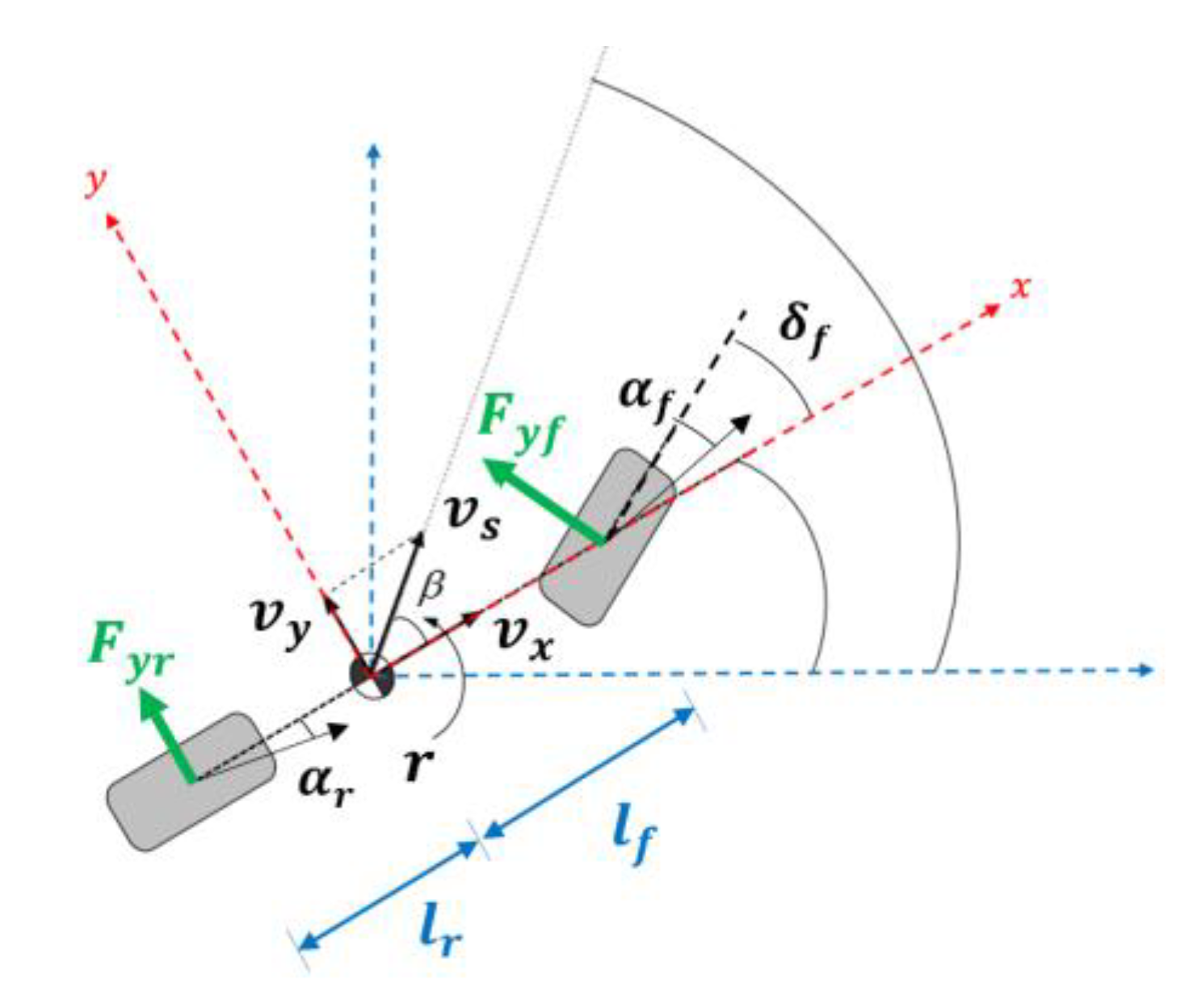
2. Vehicle Modeling
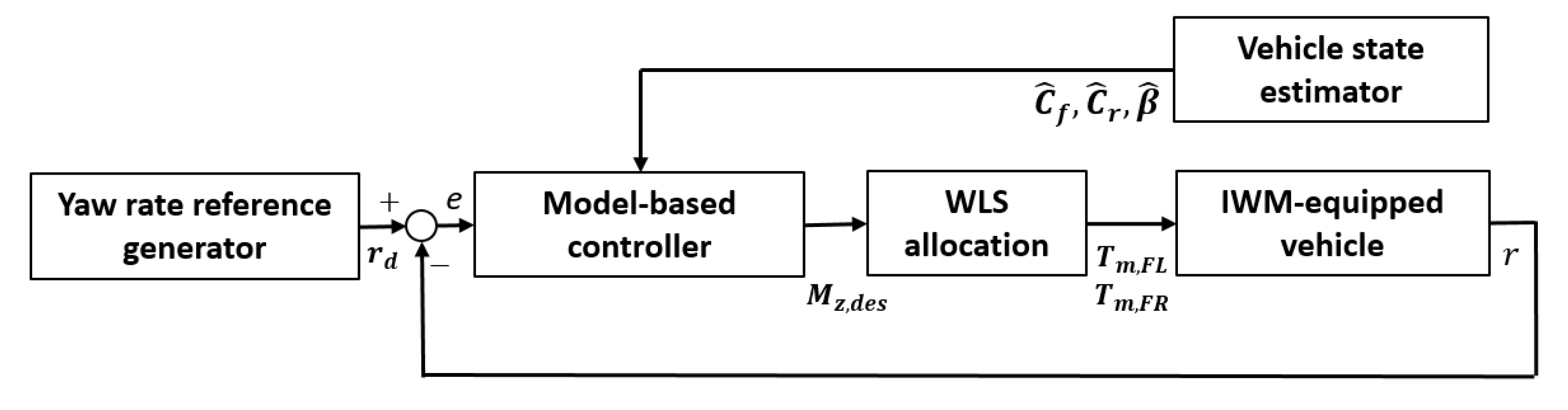
3. Controller Design
3.1. Yaw Rate Reference Generator
3.2. Model-Based Controller
4. Torque Distribution
4.1. Maximum IWM Torque
4.2. WLS Allocation
5. Simulation Study
5.1. Simulation Environments
5.2. Simulation Results
5.2.1. Comparison with the PID Controller
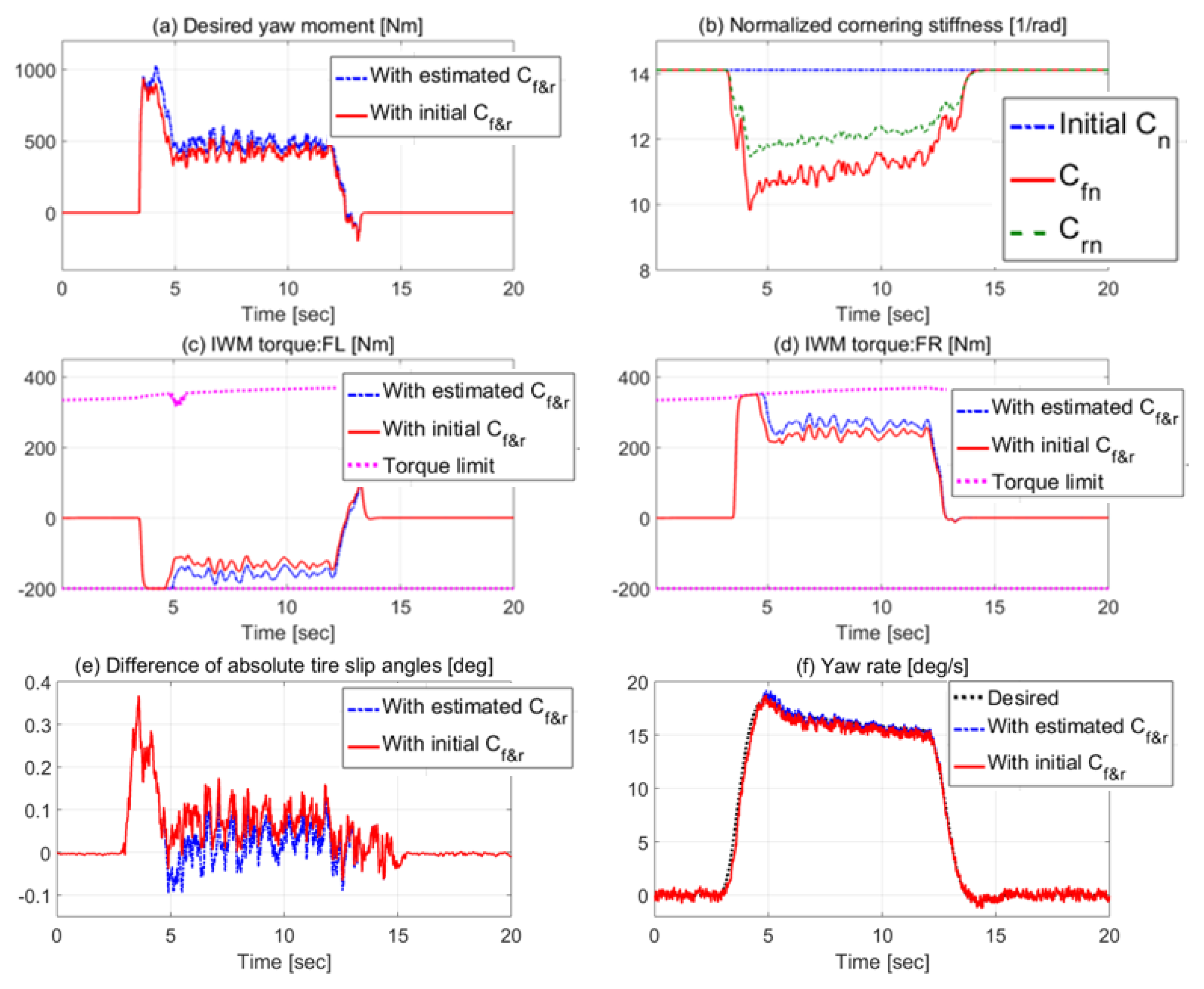
5.2.2. Comparison with Model-Based Controller with the Initial
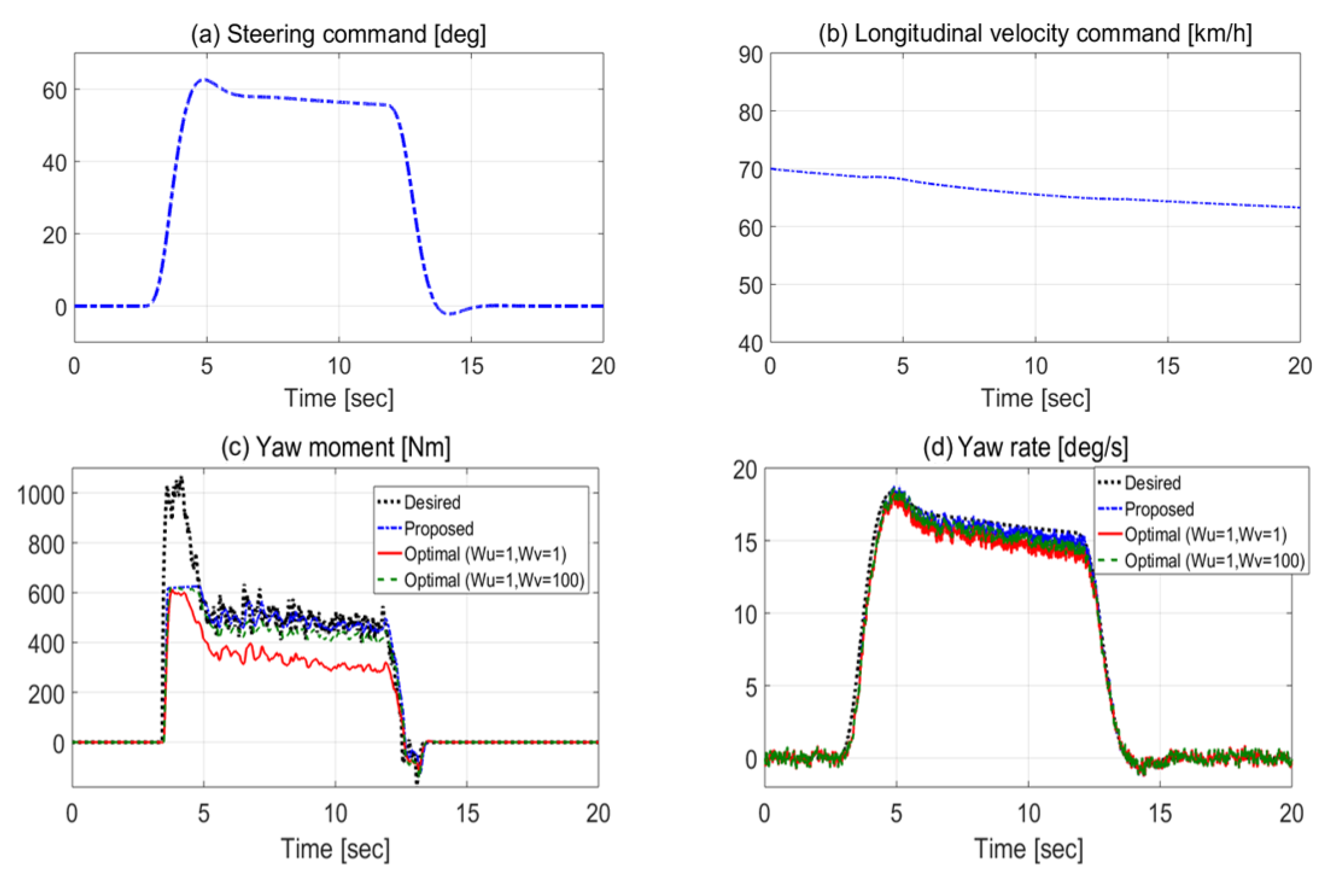
5.2.3. Comparison According to Different Weight Factors in WLS Allocation
6. Conclusions
Funding
Conflicts of Interest
References
- Visconti, A.; Cavanna, M. Method for Controlling the Side Slip Angle of a Rear-Wheel Drive Vehicle when Turning. U.S. Patent 8463498, 11 June 2013. [Google Scholar]
- Fallah, M.S.; Khajepour, A.; Fidan, B.; Chen, S.; Litkouhi, B. Controller Development Using Optimal Torque Distribution for Driver Handling Assistance. In Proceedings of the 2012 American Control Conference (ACC), Montreal, Canada, 27–29 June 2012; pp. 2910–2915. [Google Scholar]
- Murata, S. Innovation by in-wheel-motor drive unit. Veh. Sys. Dyn. 2012, 50, 807–830. [Google Scholar] [CrossRef]
- Park, G. Vehicle Sideslip Angle Estimation Based on Interacting Multiple Model Kalman Filter Using Low-Cost Sensor Fusion. IEEE Trans. Veh. Technol. 2022, 71, 6088–6099. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.B. A Model Predictive Control for Path Tracking of Electronic-Four-Wheel Drive Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 11352–11364. [Google Scholar] [CrossRef]
- Han, K.; Choi, M.; Lee, B.; Choi, S.B. Development of a Traction Control System Using a Special Type of Sliding Mode Controller for Hybrid 4WD Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 264–274. [Google Scholar] [CrossRef]
- Novellis, L.; Sorniotti, A.; Gruber, P. Wheel Torque Distribution Criteria for Electric Vehicles with Torque-Vectoring Differentials. IEEE Trans. Veh. Technol. 2014, 63, 1593–1602. [Google Scholar] [CrossRef]
- Lu, Q.; Gentile, P.; Tota, A.; Sorniotti, A.; Gruber, P.; Costamagna, F.; Smet, J. Enhancing vehicle cornering limit through sideslip and yaw rate control. Mech. Syst. Signal Process. 2016, 75, 455–472. [Google Scholar] [CrossRef]
- Goggia, T.; Sorniotti, A.; Novellis, L.; Ferrara, A.; Gruber, P.; Theunissen, J.; Steenbeke, D.; Knauder, B.; Zehetner, J. Integral Sliding Mode for the Torque-Vectoring Control of Fully Electric Vehicles: Theoretical Design and Experimental Assessment. IEEE Trans. Veh. Technol. 2015, 64, 1701–1715. [Google Scholar] [CrossRef]
- Fallah, M.S.; Khajepour, A.; Fidan, B.; Chen, S.; Litkouhi, B. Vehicle Optimal Torque Vectoring Using State-Derivative Feedback and Linear Matrix Inequality. IEEE Trans. Veh. Technol. 2013, 62, 1540–1552. [Google Scholar] [CrossRef]
- Kasinathan, D.; Kasaiezadeh, A.; Wong, A.; Khajepour, A.; Che, S.; Litkouhi, B. An Optimal Torque Vectoring Control for Vehicle Applications via Real-Time Constraints. IEEE Trans. Veh. Technol. 2016, 65, 4368–4378. [Google Scholar] [CrossRef]
- Khosravani, S.; Kasaiezadeh, A.; Khajepour, A.; Fidan, B.; Chen, S.; Litkouhi, B. Torque-Vectoring-Based Vehicle Control Robust to Driver Uncertainties. IEEE Trans. Veh. Technol. 2015, 64, 3359–3367. [Google Scholar] [CrossRef]
- Hindiyeh, R.; Gerdes, J. A Controller Framework for Autonomous Drifting: Design, Stability, and Experimental Validation. ASME J. Dyn. Syst. Meas. Control 2014, 136, 051015. [Google Scholar] [CrossRef]
- Coser, C.; Hindiyeh, R.; Gerdes, J. Analysis and control of high sideslip manoeuvres. Veh. Syst. Dyn. 2010, 48, 317–336. [Google Scholar]
- Park, G.; Choi, S.B. Optimal Brake Distribution for Electronic Stability Control Using Weighted Least Square Allocation Method. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1420–1425. [Google Scholar]
- Oh, J.; Choi, S.B. Vehicle Velocity Observer Design Using 6-D IMU and Multiple-observer Approach. IEEE Trans. Intell. Transport. Syst. 2012, 13, 1865–1879. [Google Scholar] [CrossRef]
- Park, G. Sideslip Angle Control of Electronic-Four-Wheel Drive Vehicle Using Backstepping Controller. Int. J. Automot. Technol. 2022, 23, 727–737. [Google Scholar] [CrossRef]
- Piyabongkarn, D.; Rajamani, R.; Grogg, J.; Lew, J. Development and Experimental Evaluation of a Slip Angle Estimator for Vehicle Stability Control. IEEE Trans. Control Syst. Technol. 2009, 17, 78–88. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.B.; Hyun, D.; Lee, J. Integrated Observer Approach Using In-vehicle Sensors and GPS for Vehicle State Estimation. Mechatronics 2018, 50, 134–147. [Google Scholar] [CrossRef]
- Khalil, H.K. Performance recovery under output feedback sampled-data stabilization of a class of nonlinear systems. IEEE Trans. Autom. Control 2004, 49, 2173–2184. [Google Scholar] [CrossRef]
- Han, K.; Nguyen, T.W.; Nam, K. Battery Energy Management of Autonomous Electric Vehicles Using Computationally Inexpensive Model Predictive Control. Electronics 2020, 9, 1277. [Google Scholar] [CrossRef]
- Chen, Y.; Li, X.; Wiet, C.; Wang, J. Energy Management and Driving Strategy for In-Wheel Motor Electric Ground Vehicles with Terrain Profile Preview. IEEE Trans. Ind. Inform. 2014, 10, 1938–1947. [Google Scholar] [CrossRef]
- Chen, J.; Xu, C.; Wu, C.; Xu, W. Adaptive Fuzzy Logic Control of Fuel-Cell-Battery Hybrid Systems for Electric Vehicles. IEEE Trans. Ind. Inform. 2018, 14, 292–300. [Google Scholar] [CrossRef]
- Gipser, M. FTire—The tire simulation model for all applications related to vehicle dynamics. Veh. Syst. Dyn. 2007, 45, 139–151. [Google Scholar] [CrossRef]
- Park, G.; Han, K.; Nam, K.; Kim, H.; Choi, S.B. Torque Vectoring Algorithm of Electronic-Four-Wheel Drive Vehicles for Enhancement of Cornering Performance. IEEE Trans. Veh. Technol. 2020, 69, 3668–3679. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Quantity | Value |
|---|---|---|
| Total vehicle mass | 1830 kg | |
| CG-front axle distance | 1400 mm | |
| CG-rear axle distance | 1650 mm | |
| Yaw moment of inertia | ||
| Effective tire radius | 335 mm | |
| Height of CG | 550 mm | |
| Track width | 1600 mm | |
| Initial tire cornering stiffness of front axle (normalized) | ||
| Initial tire cornering stiffness of rear axle (normalized) | ||
| Steering gear ratio | 21.2 |
| Controller Type | RMS Error of Yaw Rate [deg/s] | [1/s] (in Initial Cornering) |
|---|---|---|
| No control | 1.348 | 0.253 |
| PID controller | 0.721 | 0.330 |
| Model based controller with initial | 0.590 | 0.342 |
| Proposed controller | 0.532 | 0.342 |
| Allocation Method | RMS Error of Yaw Rate [deg/s] |
|---|---|
| Optimal WLS allocation (, ) | 0.677 |
| Optimal WLS allocation (, ) | 0.559 |
| Proposed WLS allocation (, ) | 0.532 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, G. A Vehicle Lateral Motion Control Based on Tire Cornering Stiffness Estimation Using In-Wheel Motors. Electronics 2022, 11, 2589. https://doi.org/10.3390/electronics11162589
Park G. A Vehicle Lateral Motion Control Based on Tire Cornering Stiffness Estimation Using In-Wheel Motors. Electronics. 2022; 11(16):2589. https://doi.org/10.3390/electronics11162589
Chicago/Turabian StylePark, Giseo. 2022. "A Vehicle Lateral Motion Control Based on Tire Cornering Stiffness Estimation Using In-Wheel Motors" Electronics 11, no. 16: 2589. https://doi.org/10.3390/electronics11162589
APA StylePark, G. (2022). A Vehicle Lateral Motion Control Based on Tire Cornering Stiffness Estimation Using In-Wheel Motors. Electronics, 11(16), 2589. https://doi.org/10.3390/electronics11162589