
Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning

Abstract
:1. Introduction
2. Evaporation Duct Refractivity Profile, Sea Clutter Power and Target Echo Power Calculation
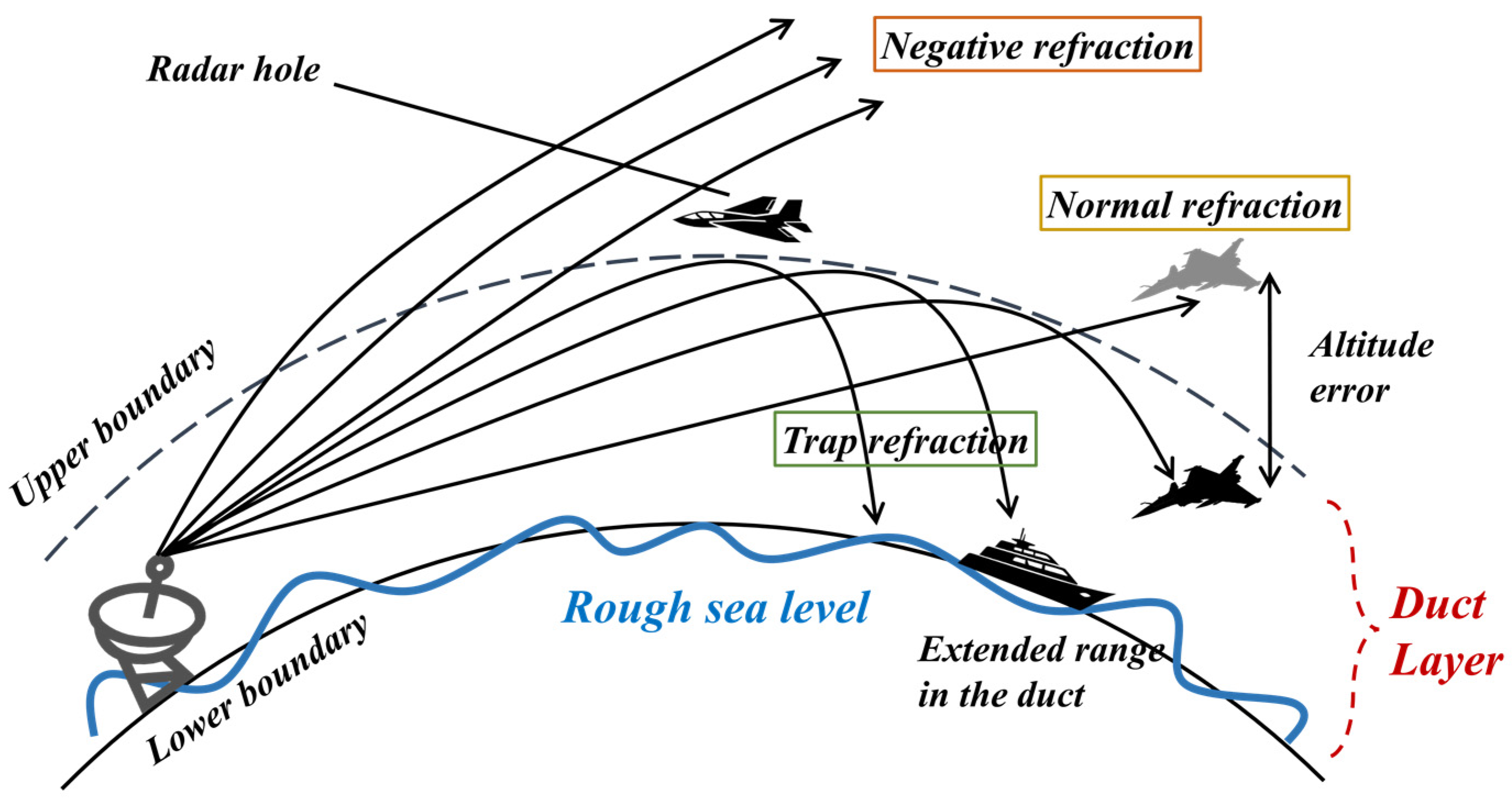
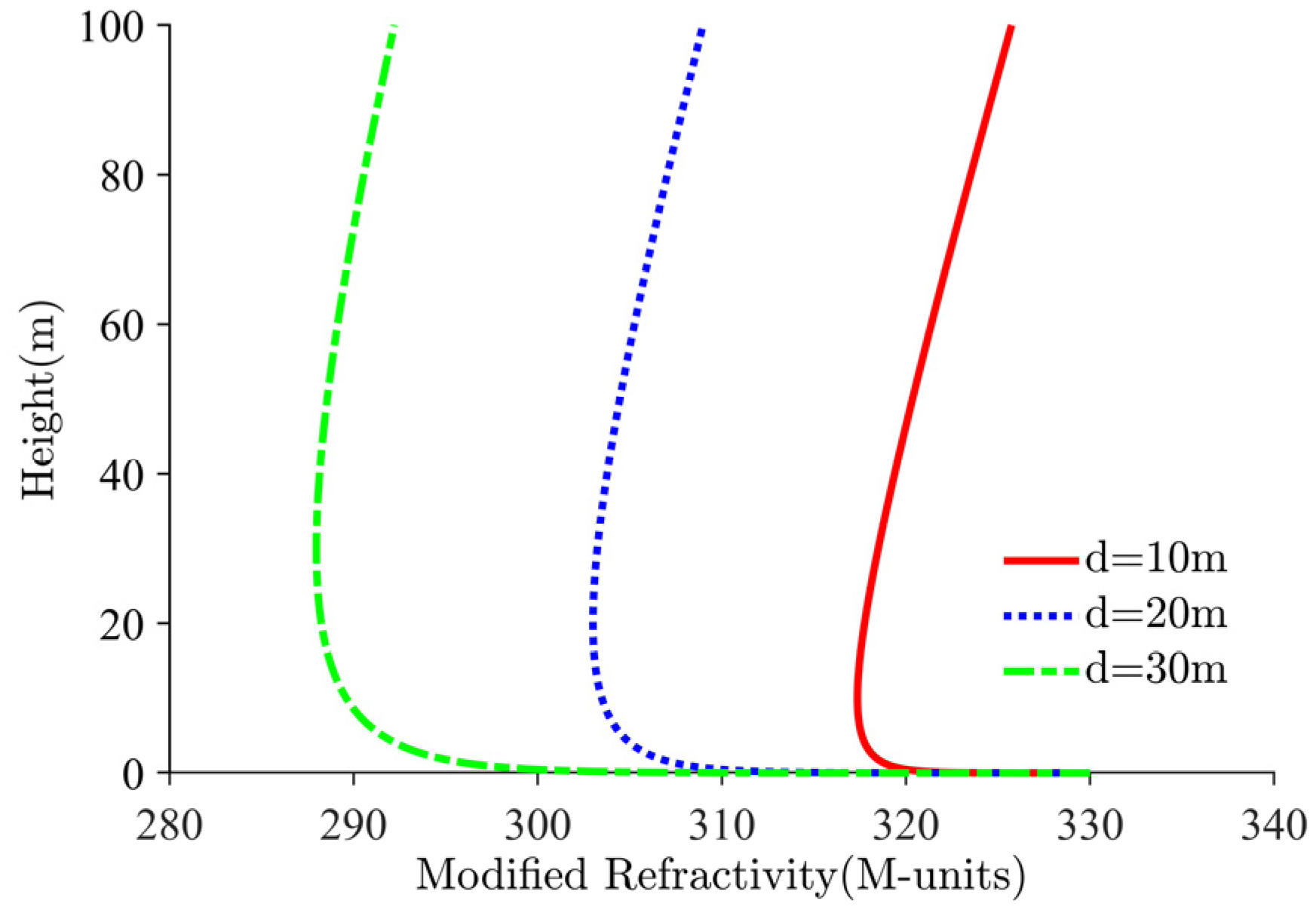
2.1. Evaporation Duct Refractivity Profile Model
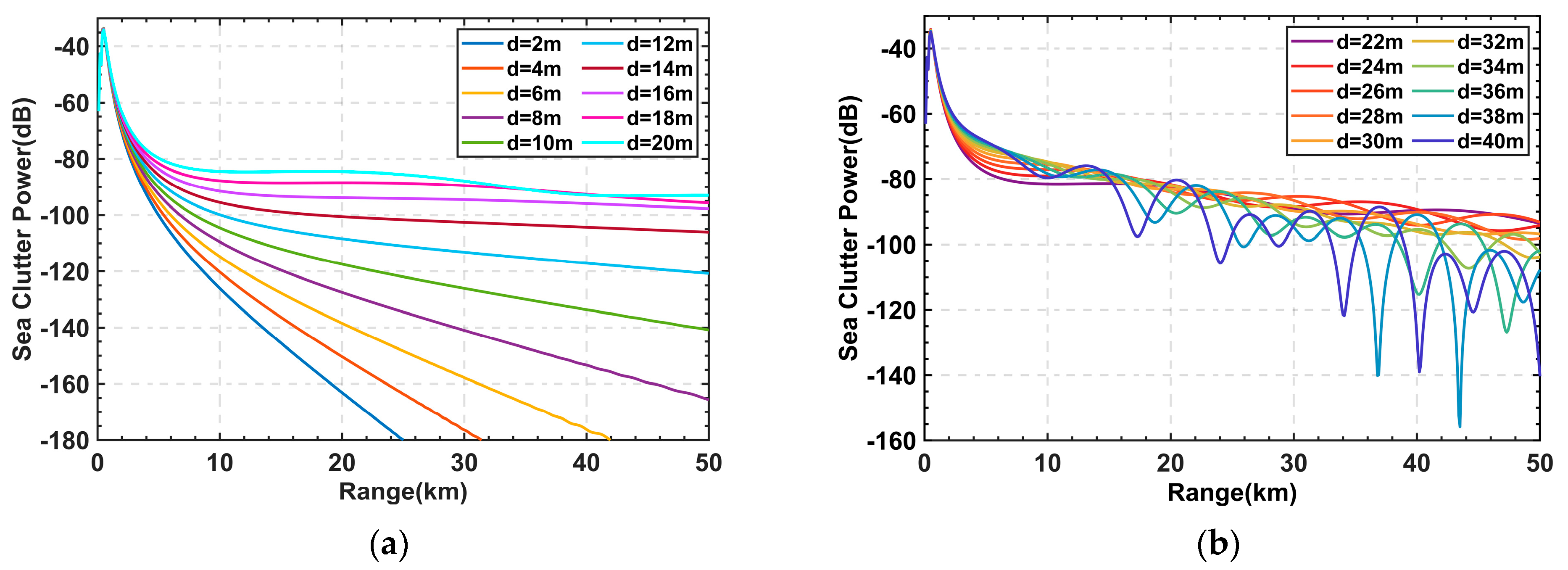
2.2. Target Echo and Sea Clutter Power Calculation
3. EDH Inversion Based on Sea Clutter
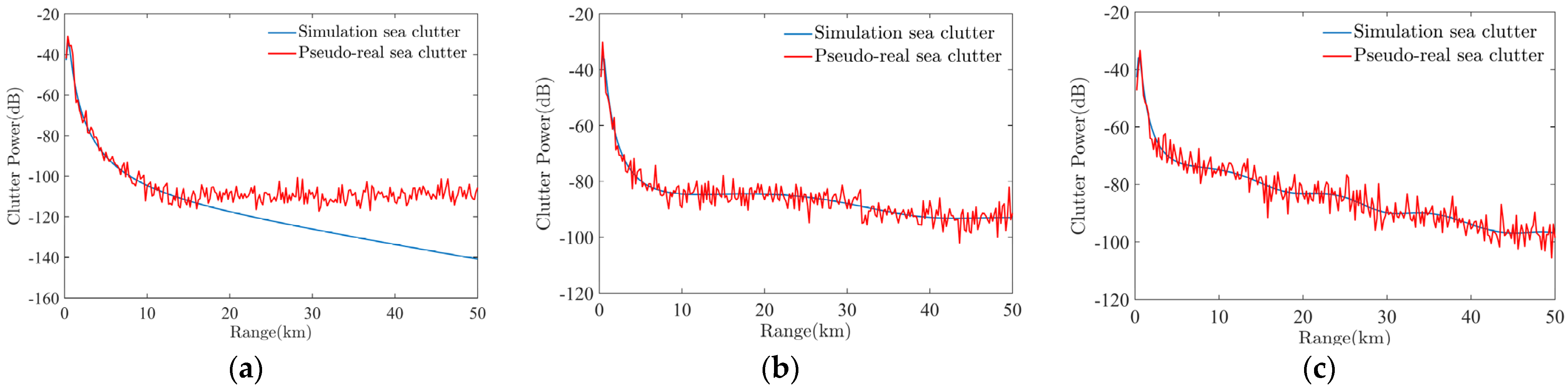
3.1. Pseudo-Real Radar Sea Clutter Power Simulation
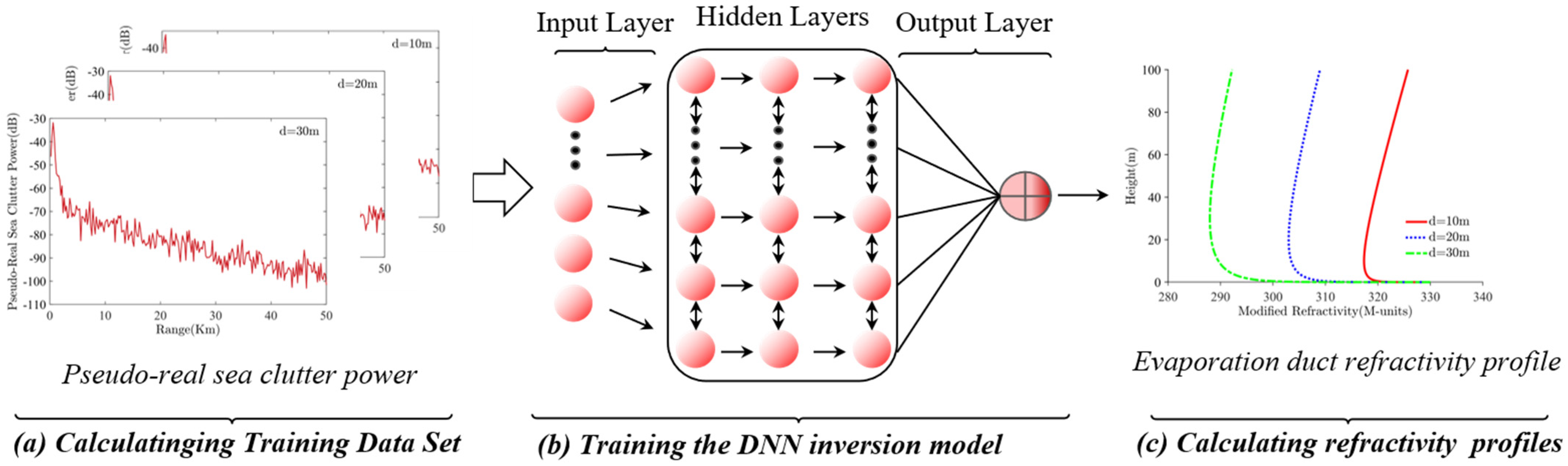
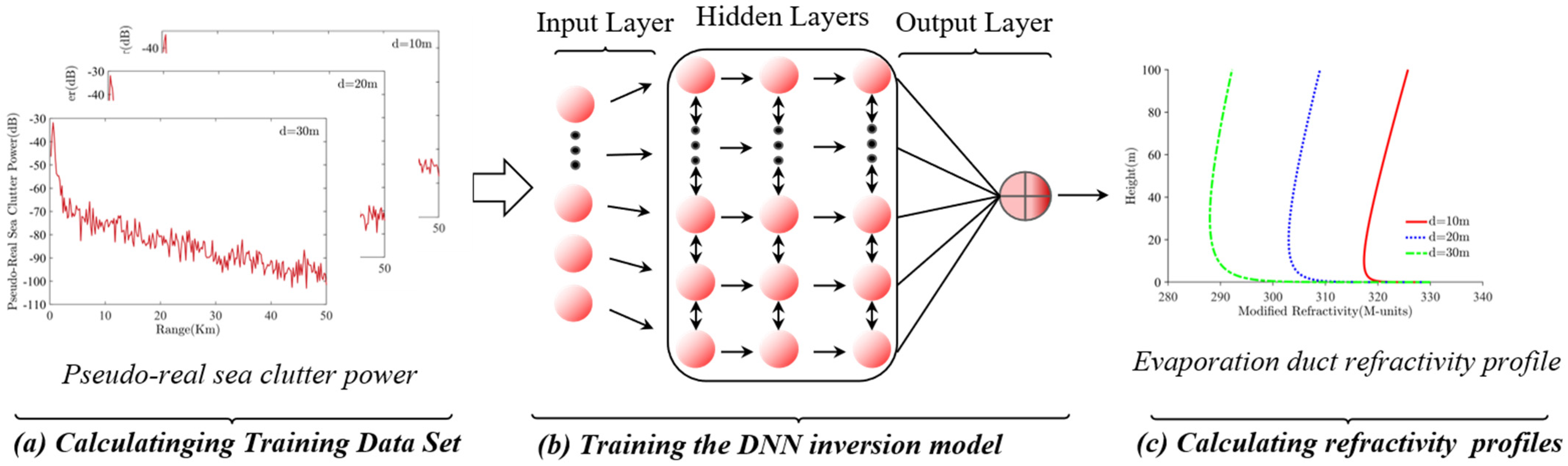
3.2. Inversion Model Based on DNN
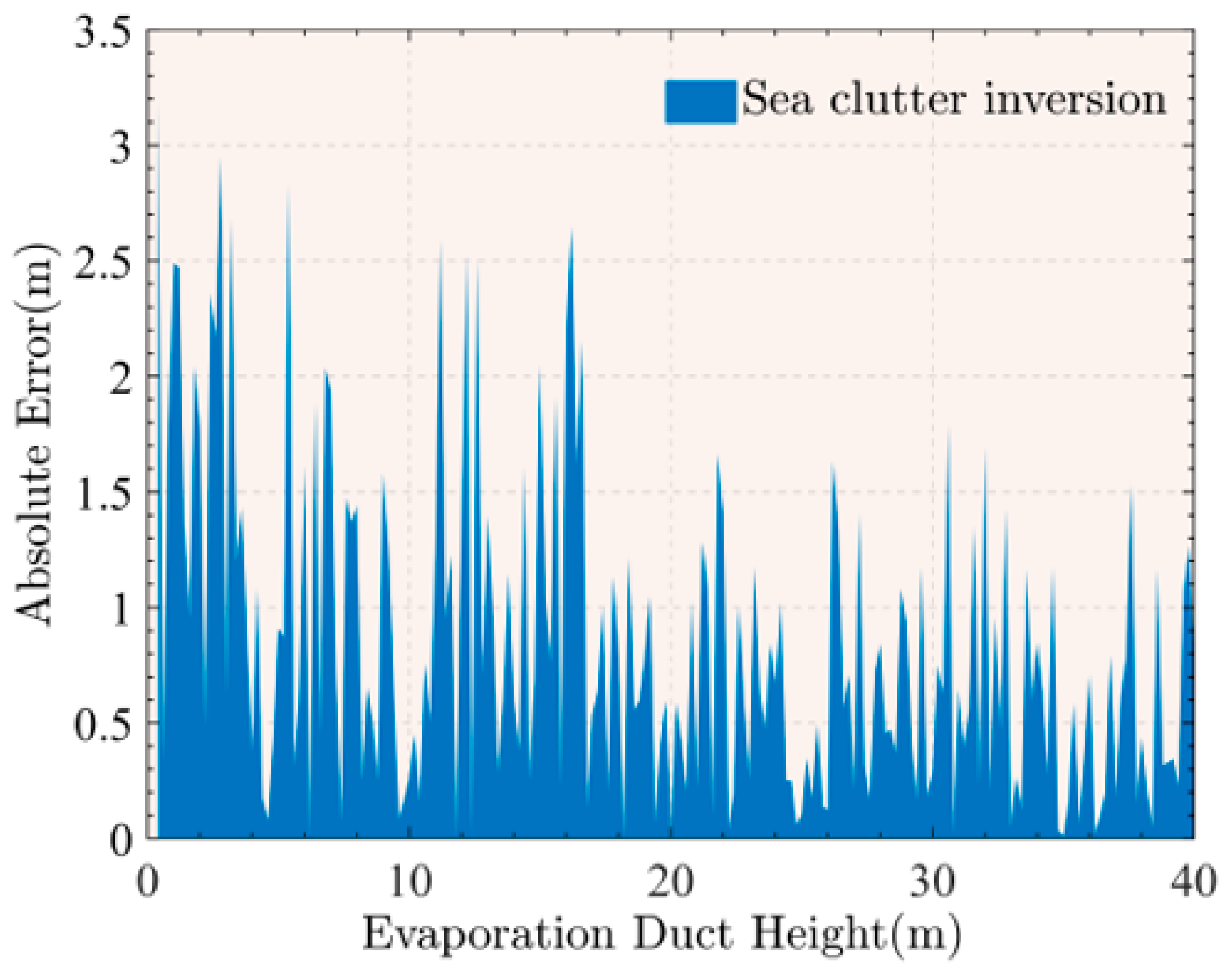
3.3. Inversion and Analysis of EDH Based on DNN
4. Joint Inversion Model of EDH Based on Radar Sea Clutter and Target
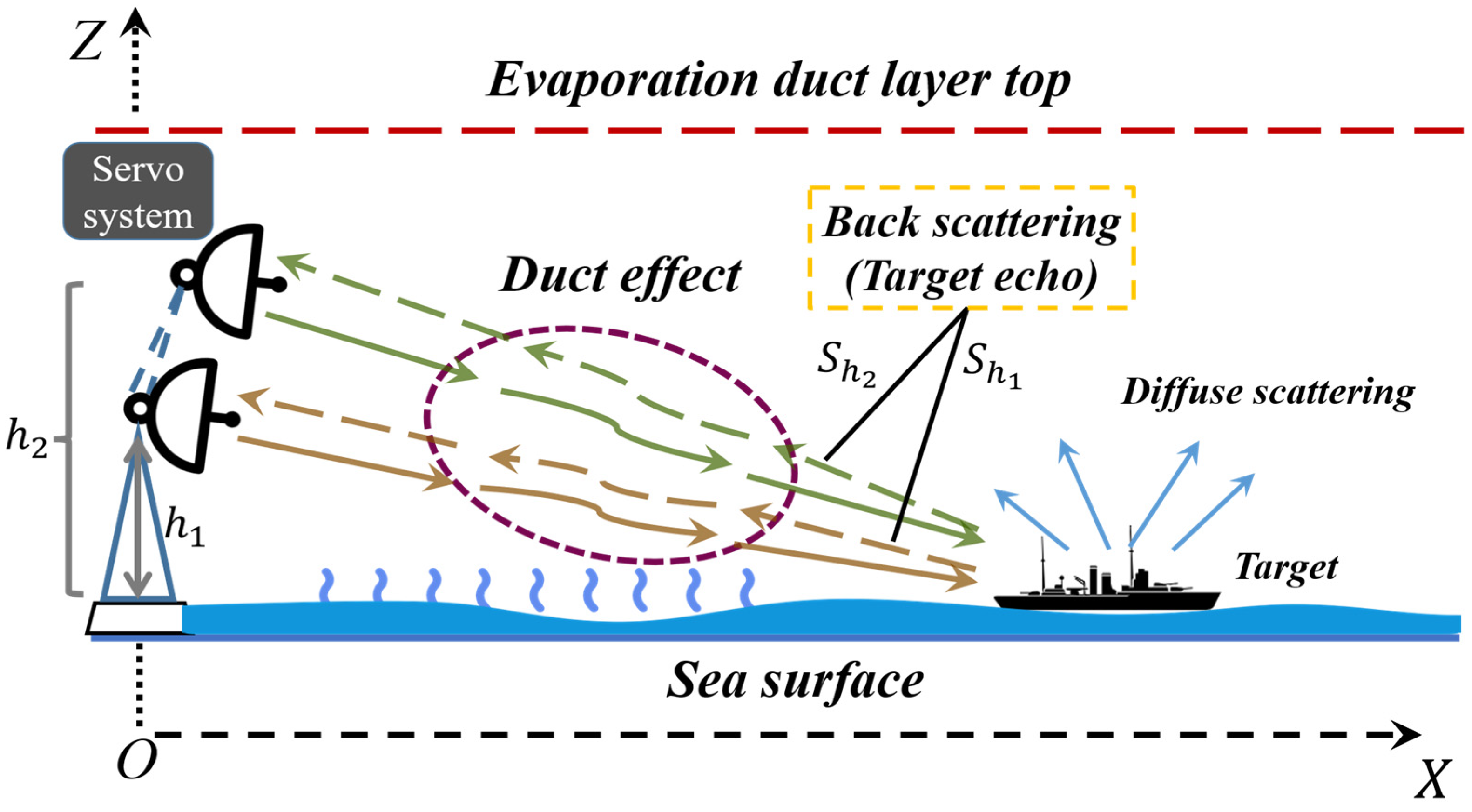
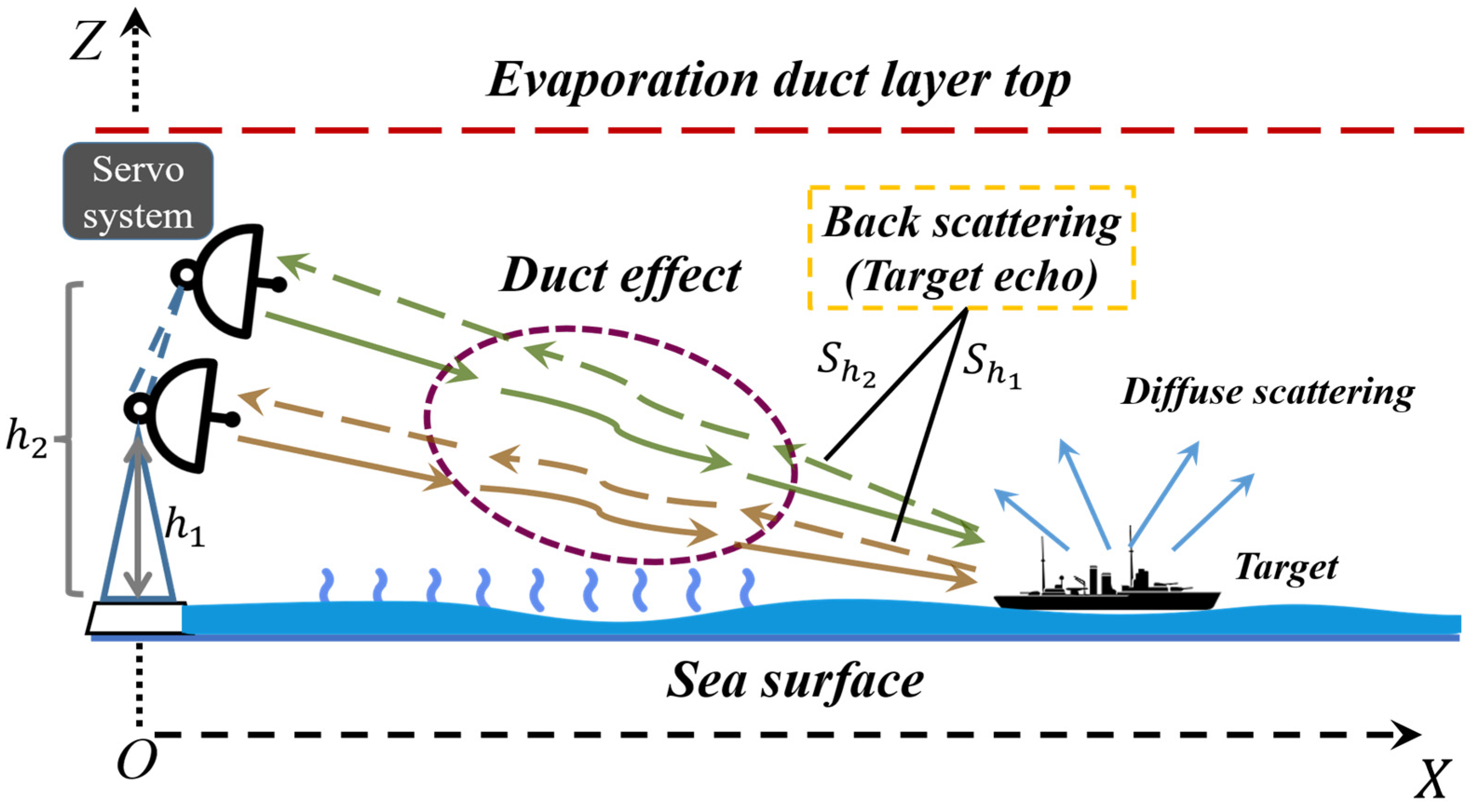
4.1. The Use of Maritime Target Echo Information
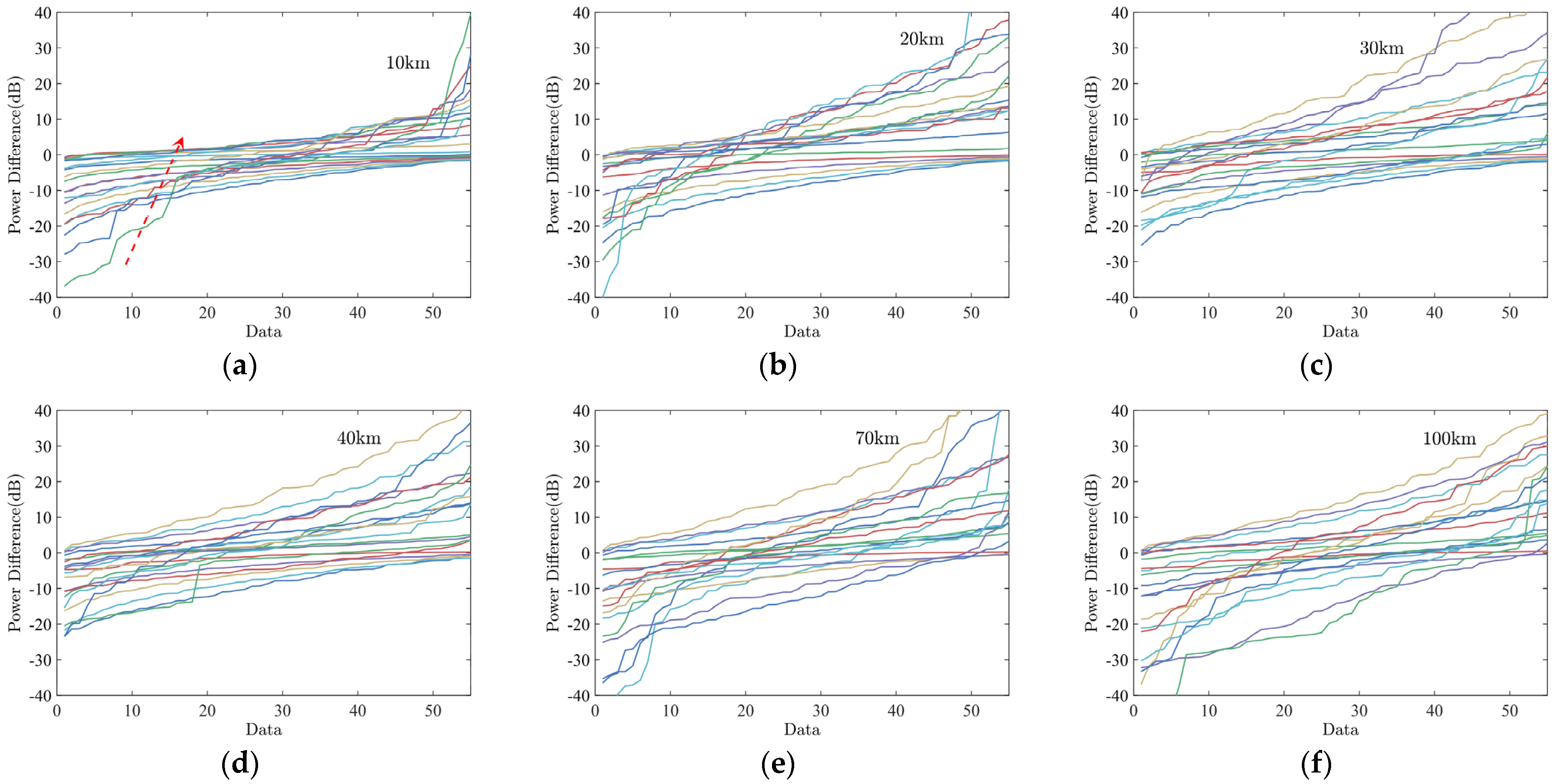
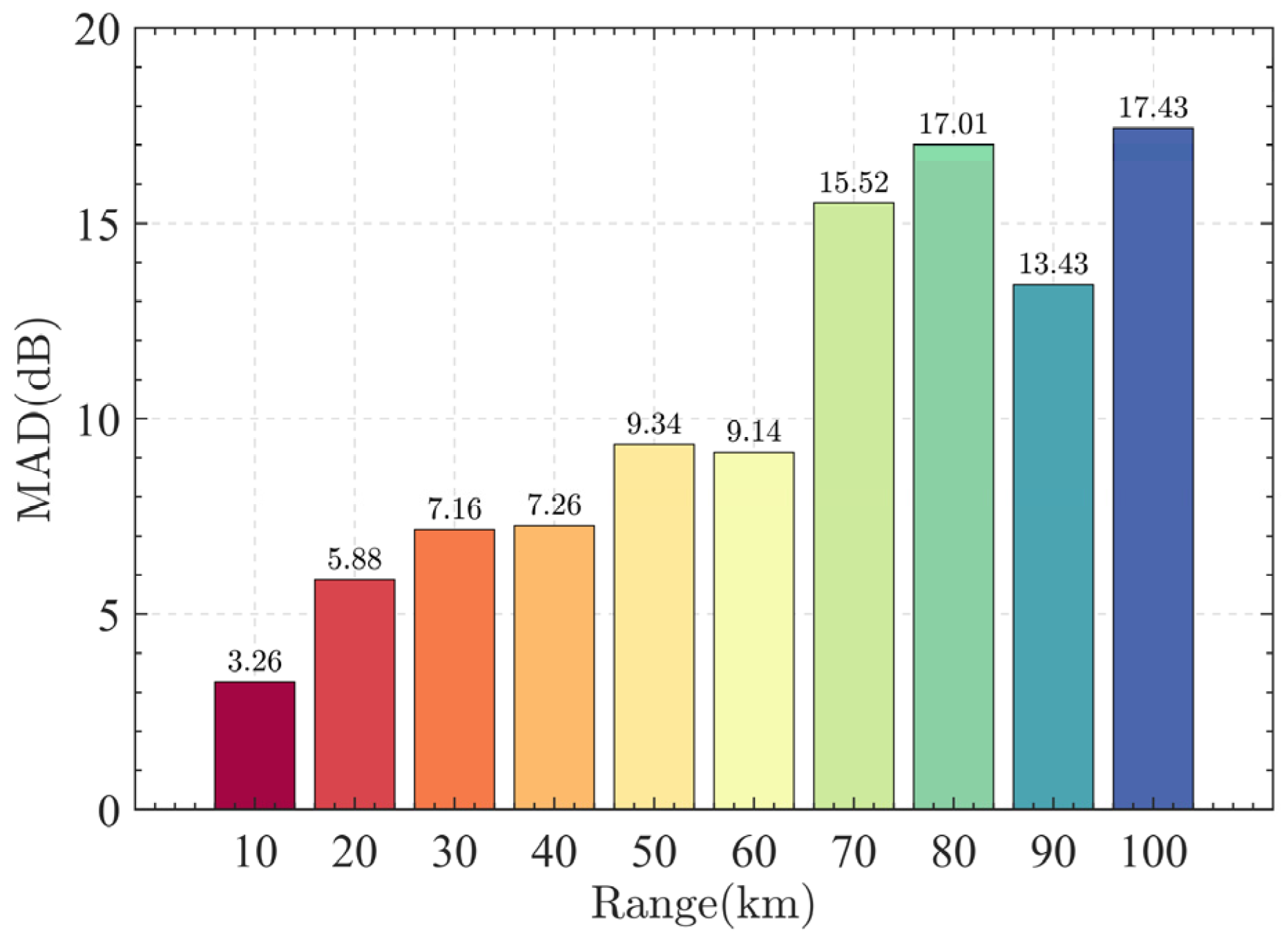
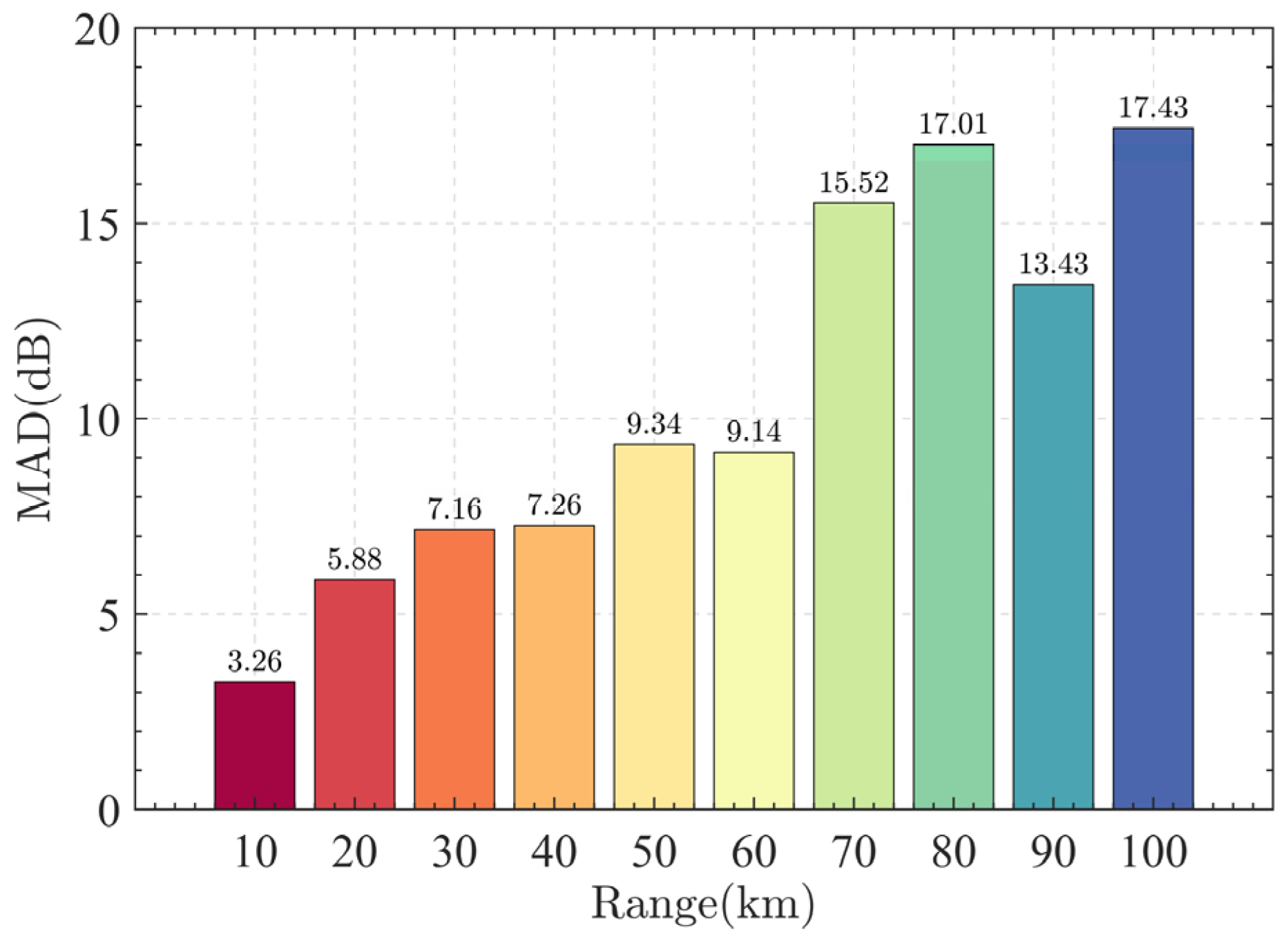
4.2. Echo Signal Sensitivity Analysis at Different Locations
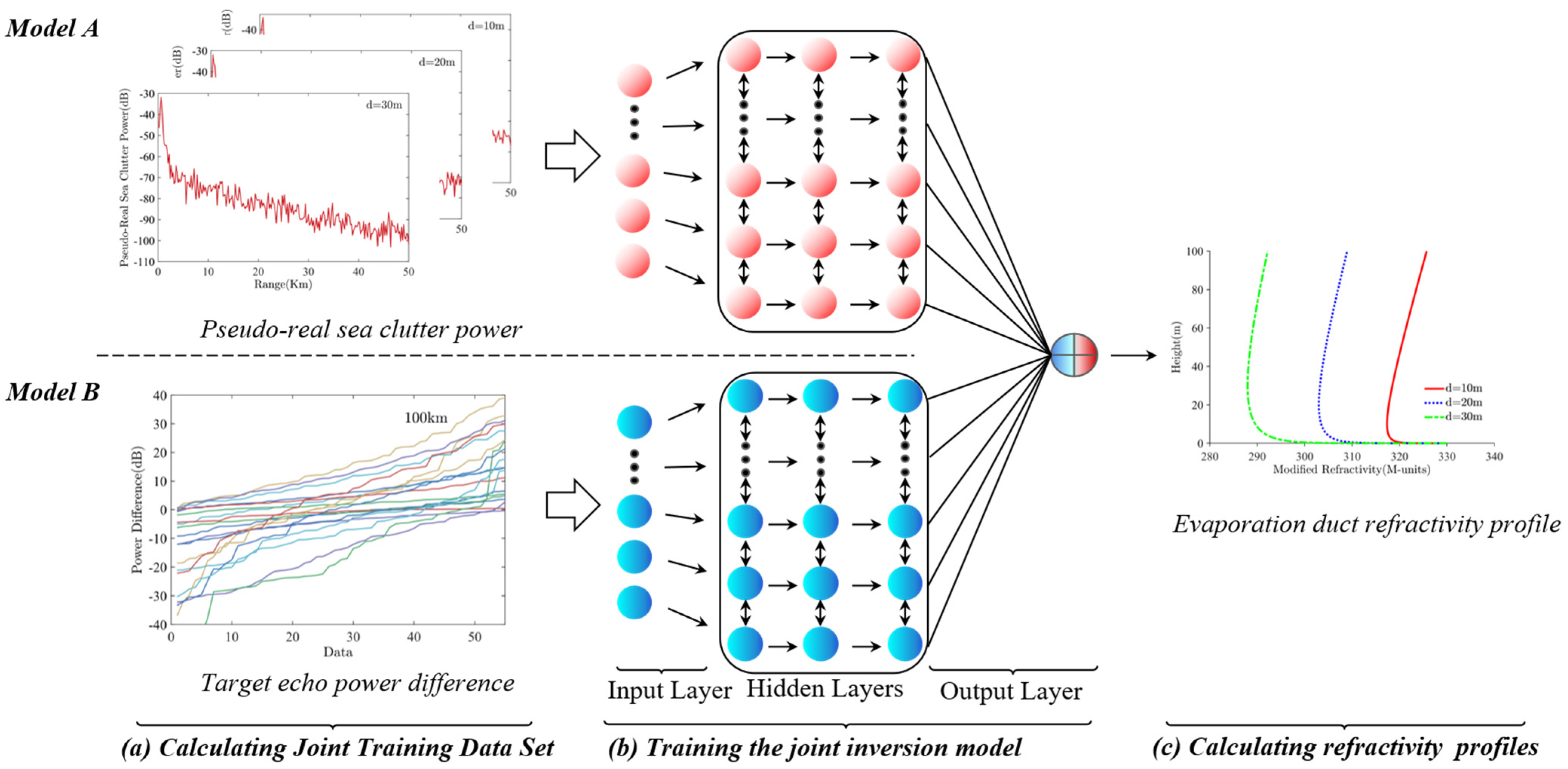
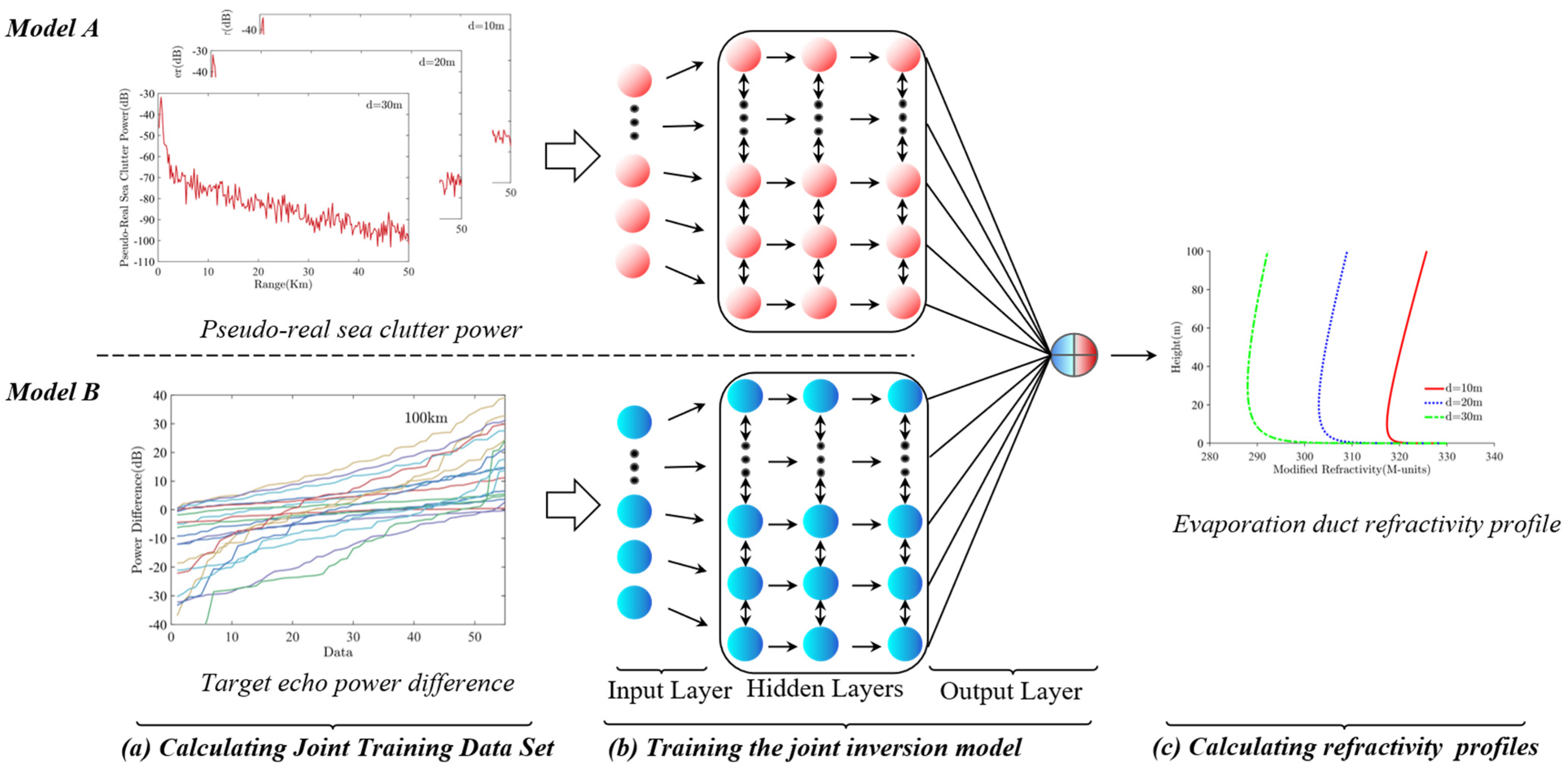
4.3. DNN-Based Joint Inversion Model Framework
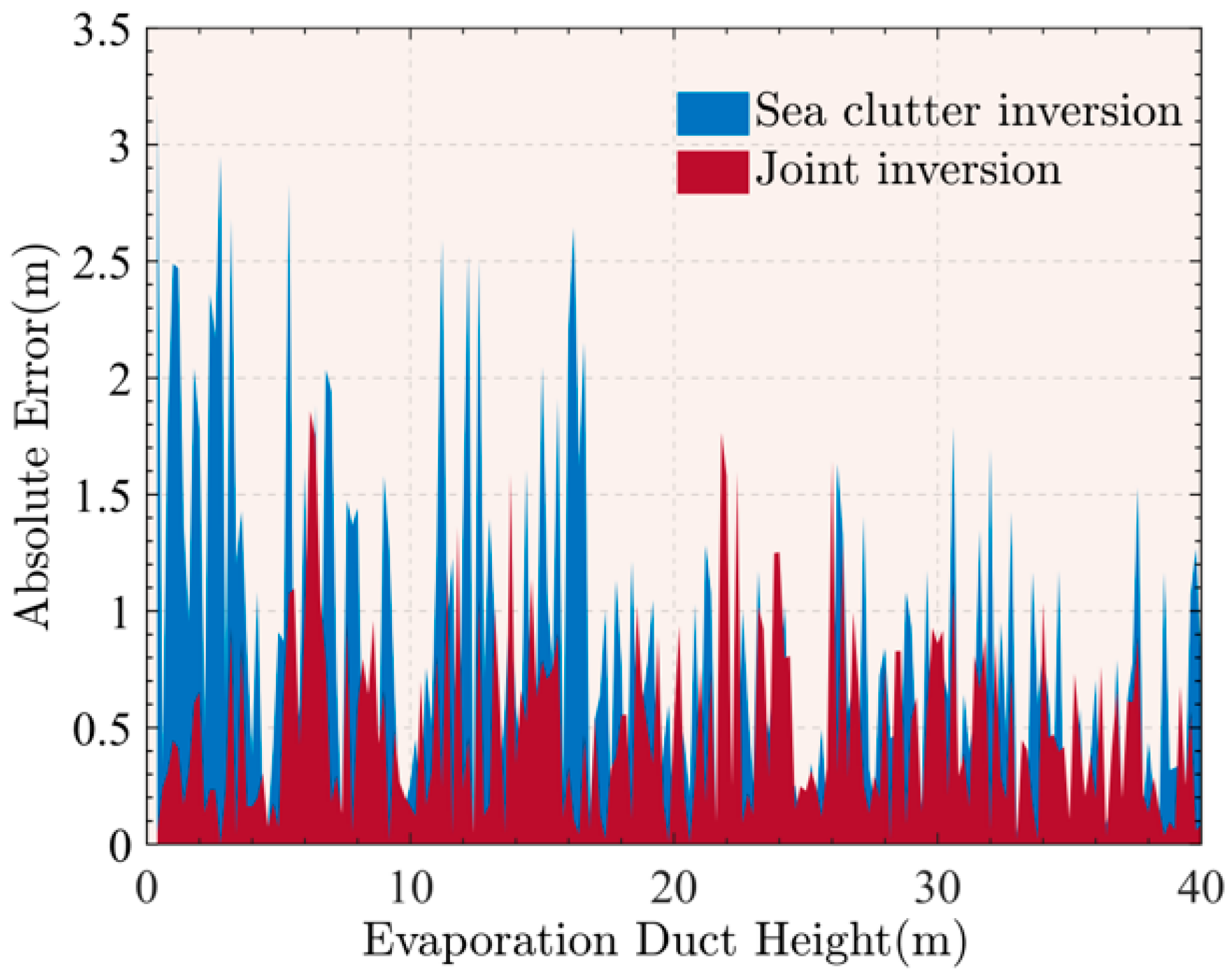
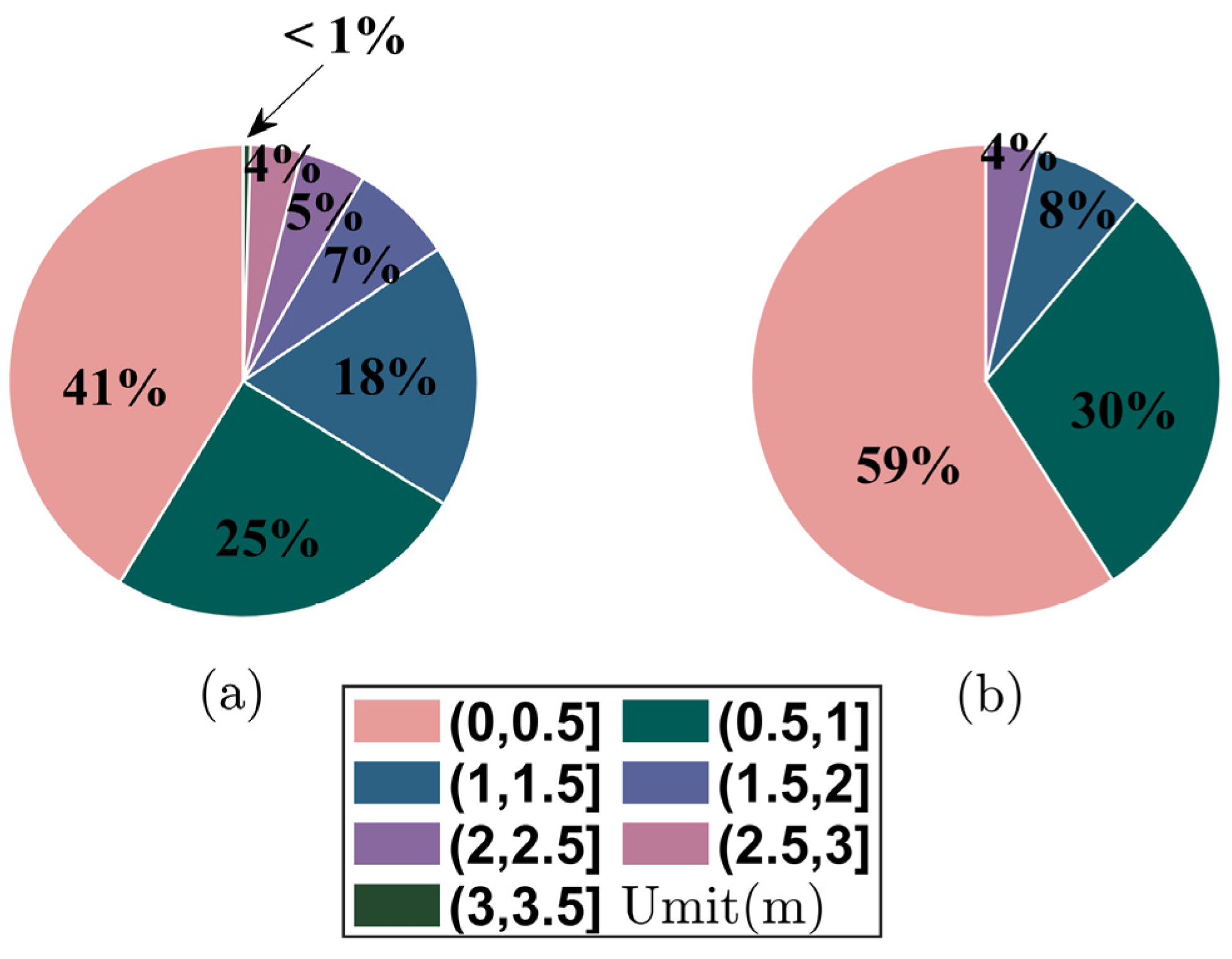
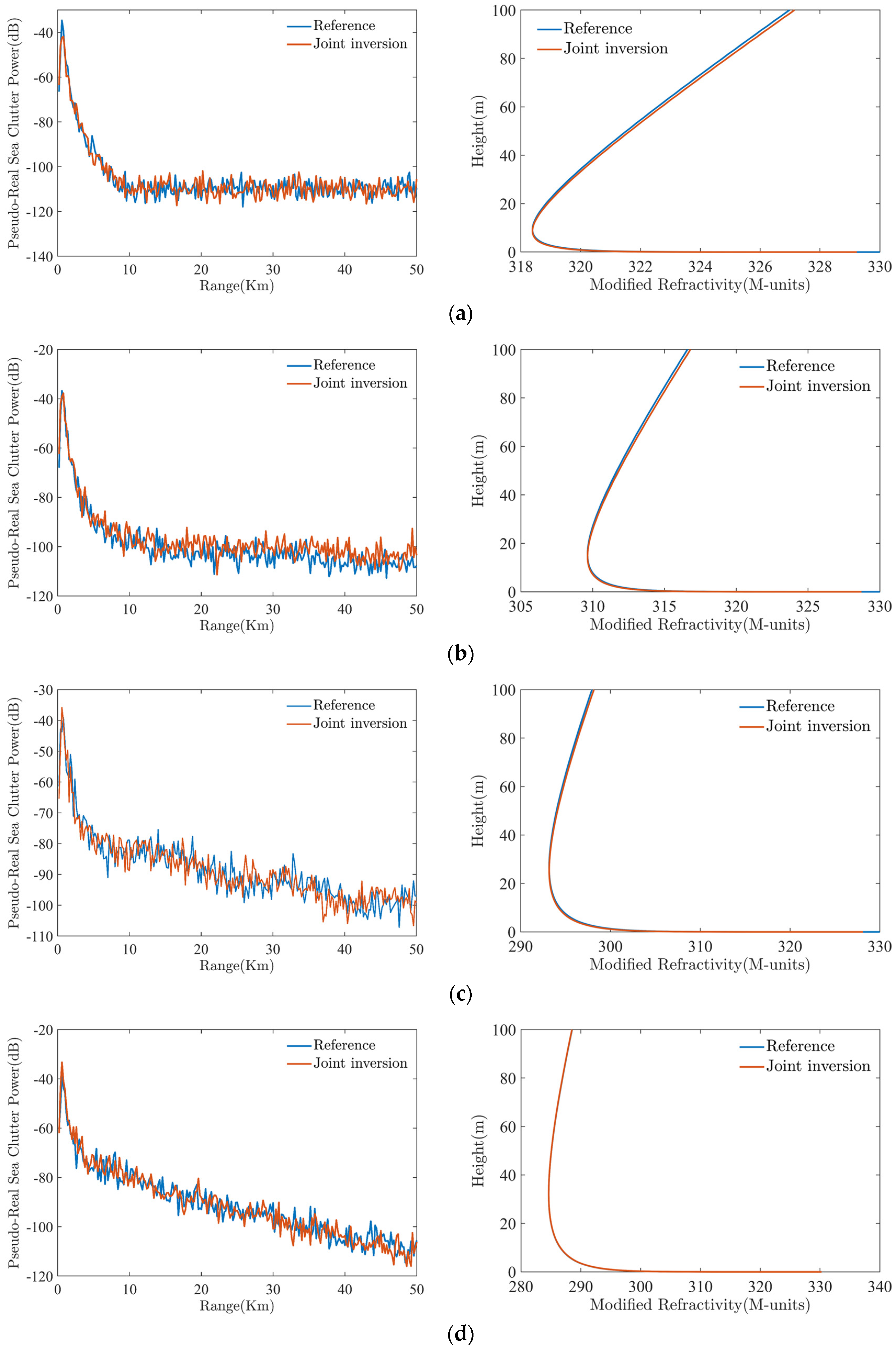
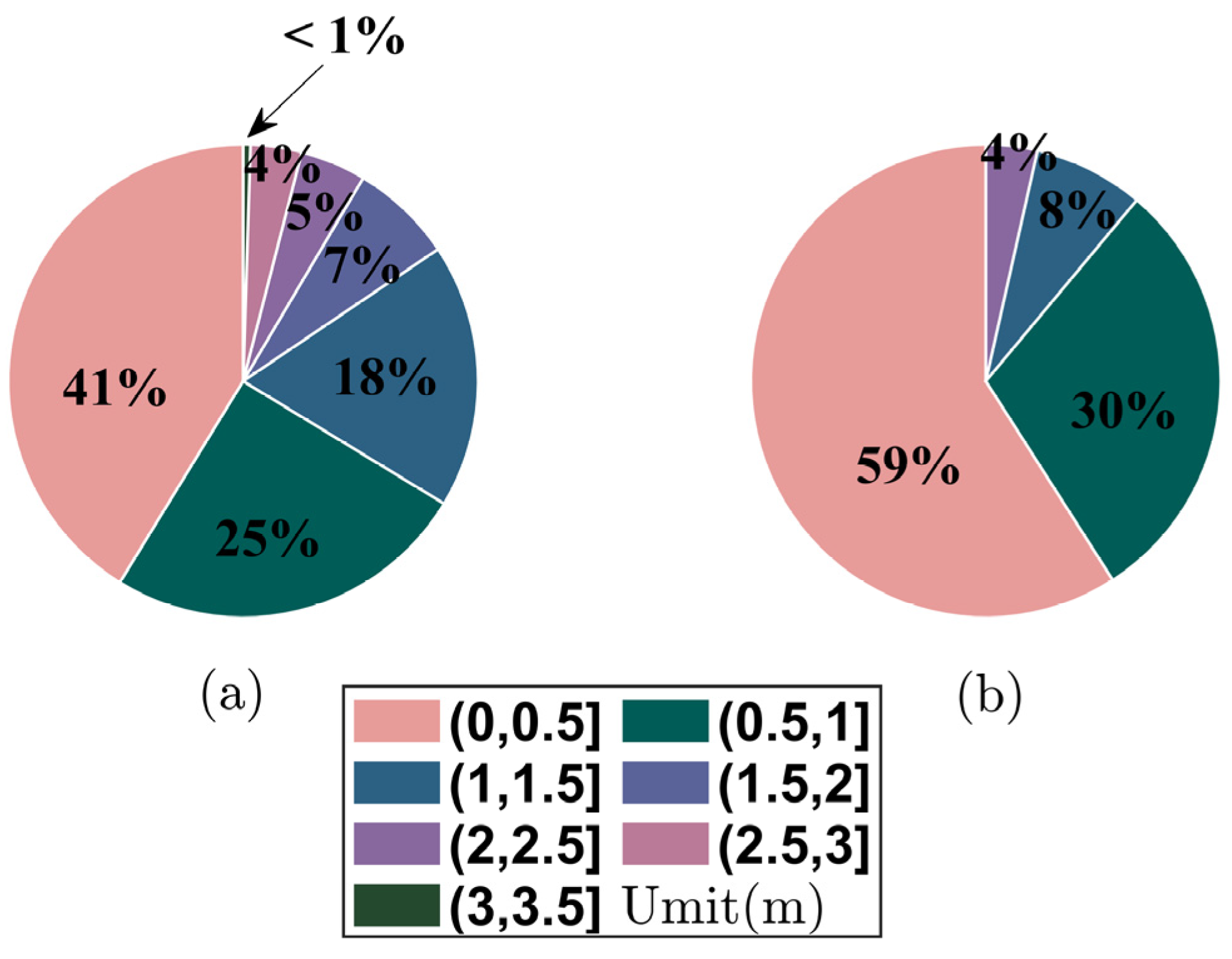
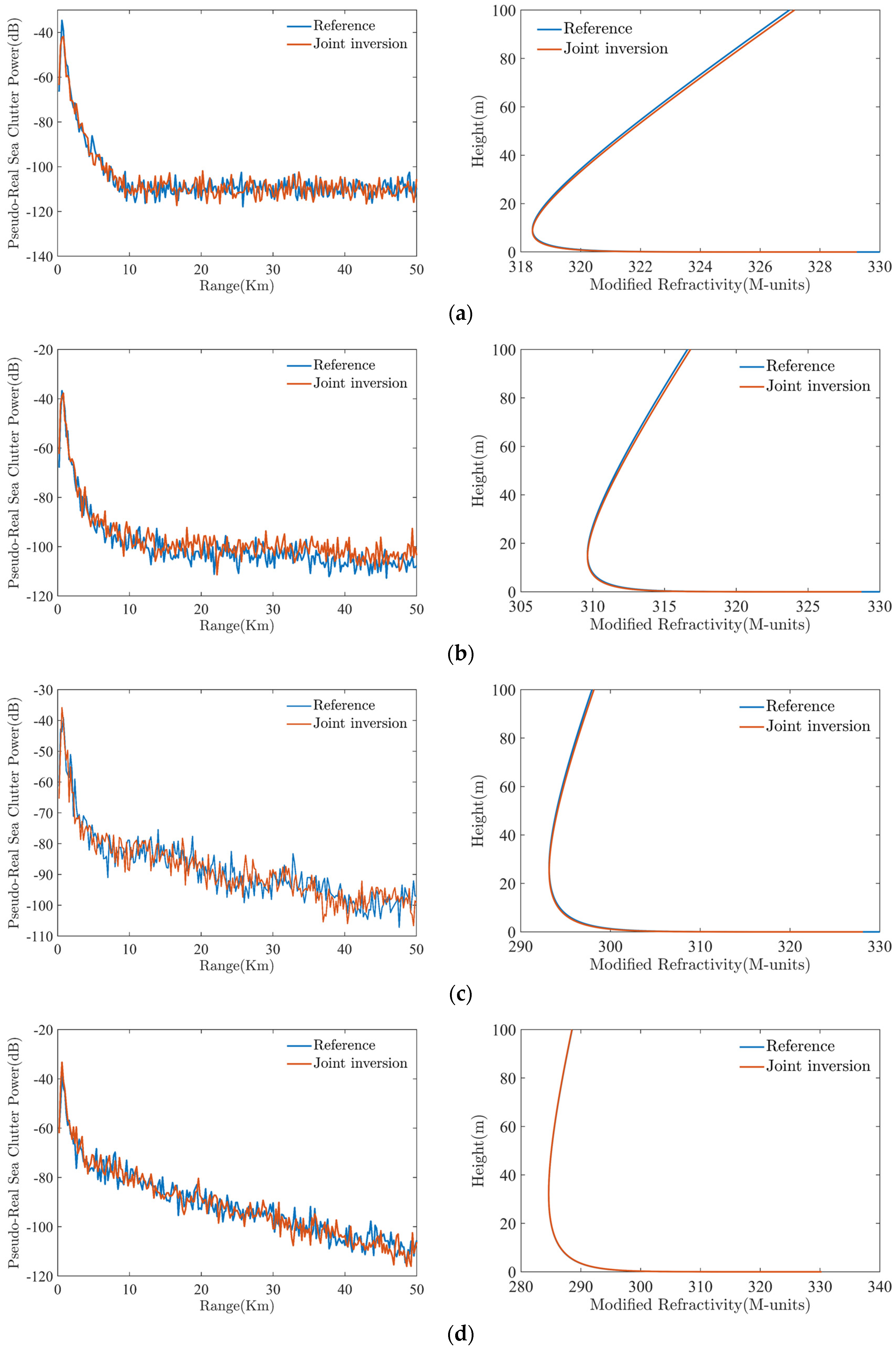
4.4. Joint Inversion and Analysis of EDH Based on Sea Clutter and Target Echo
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, X.D.; Yang, K.D.; Ma, Y.L. Calculation Method for Evaporation Duct Profiles Based on Artificial Neural Network. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2274–2278. [Google Scholar] [CrossRef]
- Barrios, A.E. Parabolic equation modeling in horizontally inhomogeneous environments. IEEE Trans. Antennas Propag. 1992, 40, 791–797. [Google Scholar] [CrossRef] [Green Version]
- Dang, M.X.; Wu, J.J.; Cui, S.C.; Guo, X.; Cao, Y.H.; Wei, H.L.; Wu, Z.S. Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts. Remote Sens. 2021, 13, 1173. [Google Scholar] [CrossRef]
- Musson Genon, L.; Gauthier, S.; Bruth, E. A simple method to determine evaporation duct height in the sea surface boundary layer. Radio Sci. 1992, 27, 635–644. [Google Scholar] [CrossRef]
- Anderson, K.D. Radar measurements at 16.5 GHz in the oceanic evaporation duct. IEEE Trans. Antennas Propag. 1989, 37, 100–106. [Google Scholar] [CrossRef] [Green Version]
- Lionis, A.; Peppas, K.; Nistazakis, H.E.; Tsigopoulos, A.D.; Cohn, K. Experimental Performance Analysis of an Optical Communication Channel over Maritime Environment. Electronics 2020, 9, 1109. [Google Scholar] [CrossRef]
- Han, J.; Wu, J.J.; Zhu, Q.L.; Wang, H.G.; Zhou, Y.F.; Jiang, M.B.; Zhang, S.B.; Wang, B. Evaporation Duct Height Nowcasting in China’s Yellow Sea Based on Deep Learning. Remote Sens. 2021, 13, 1577. [Google Scholar] [CrossRef]
- Xie, F.; Dong, M.Z.; Wang, X.T.; Yan, J. Infrared Small-Target Detection Using Multiscale Local Average Gray Difference Measure. Electronics 2022, 11, 1547. [Google Scholar] [CrossRef]
- Fountoulakis, V.; Earls, C. Inverting for Maritime Environments Using Proper Orthogonal Bases From Sparsely Sampled Electromagnetic Propagation Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7166–7176. [Google Scholar] [CrossRef]
- Rogers, L.T.; Hattan, C.P.; Stapleton, J.K. Estimating evaporation duct heights from radar sea echo. Radio Sci. 2000, 35, 955–966. [Google Scholar] [CrossRef] [Green Version]
- Vasudevan, S.; Krolik, J.L. Refractivity estimation from radar clutter by sequential importance sampling with a Markov model for microwave propagation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001. [Google Scholar]
- Gerstoft, P.; Rogers, L.T.; Krolik, J.L.; Hodgkiss, W.S. Inversion for refractivity parameters from radar sea clutter. Radio Sci. 2003, 38, 11–18. [Google Scholar] [CrossRef]
- Barrios, A.E. Estimation of surface-based duct parameters from surface clutter using a ray trace approach. Radio Sci. 2004, 39, 1–9. [Google Scholar] [CrossRef]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S. Estimation of radio refractivity from Radar clutter using Bayesian Monte Carlo analysis. IEEE Trans. Antennas Propag. 2006, 54, 1318–1327. [Google Scholar] [CrossRef]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S. Statistical maritime radar duct estimation using hybrid genetic algorithm–Markov chain Monte Carlo method. Radio Sci. 2007, 42, RS3014. [Google Scholar] [CrossRef] [Green Version]
- Wan, R.Z.; Tian, C.D.; Zhang, W.; Deng, W.D.; Yang, F. A Multivariate Temporal Convolutional Attention Network for Time-Series Forecasting. Electronics 2022, 11, 1516. [Google Scholar] [CrossRef]
- Guo, X.W.; Wu, J.J.; Zhang, J.P.; Han, J. Deep learning for solving inversion problem of atmospheric refractivity estimation. Sust. Cities Soc. 2018, 43, 524–531. [Google Scholar] [CrossRef]
- Li, G.; Cai, H.Z.; Li, C.F. Alternating Joint Inversion of Controlled-Source Electromagnetic and Seismic Data Using the Joint Total Variation Constraint. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5914–5922. [Google Scholar] [CrossRef]
- Alekseev, A.S. Quantitative statement and general properties of solutions of cooperative inverse problems (integral geophysics). SEG Abstr. 1991, 61, 1021–1022. [Google Scholar]
- Cai, H.Z.; Zhdanov, M. Joint Inversion of Gravity and Magnetotelluric Data for the Depth-to-Basement Estimation. IEEE Trans. Geosci. Remote Sens. 2017, 14, 1228–1232. [Google Scholar] [CrossRef]
- Haack, T.; Wang, C.; Garrett, S.; Glazer, A.; Mailhot, J.; Marshall, R. Mesoscale Modeling of Boundary Layer Refractivity and Atmospheric Ducting. J. Appl. Meteorol. Clim. 2010, 49, 2437–2457. [Google Scholar] [CrossRef]
- Douvenot, R.; Fabbro, V.; Gerstoft, P.; Bourlier, C.; Saillard, J. Real time refractivity from clutter using a best fit approach improved with physical information. Radio Sci. 2010, 45, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.P.; Wu, Z.S.; Hu, R.X. Combined Estimation of Low-Altitude Radio Refractivity Based on Sea Clutters from Multiple Shipboard Radars. J. Electromagn. Waves Appl. 2011, 25, 1201–1212. [Google Scholar] [CrossRef]
- Yang, C. Estimation of the Atmospheric Duct from Radar Sea Clutter Using Artificial Bee Colony Optimization Algorithm. Prog. Electromagn. Res. 2013, 135, 183–199. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.N.; Wang, Z.; Cheng, Z.; Chen, J. Target detection for a kind of troposcatter over-the-horizon passive radar based on channel fading information. IET Radar Sonar Nav. 2018, 12, 407–416. [Google Scholar] [CrossRef]
- Dong, X.; Sun, F.; Zhu, Q.L.; Lin, L.K.; Zhao, Z.W.; Zhou, C. Tropospheric Refractivity Profile Estimation by GNSS Measurement at China Big-Triangle Points. Atmosphere 2021, 12, 1468. [Google Scholar] [CrossRef]
- Zhang, J.P.; Wu, Z.S.; Zhu, Q.L.; Wang, B. A Four-Parameter M-Profile Model for the Evaporation Duct Estimation from Radar Clutter. Prog. Electromagn. Res. 2011, 114, 353–368. [Google Scholar] [CrossRef] [Green Version]
- Compaleo, J.; Yardim, C.; Xu, L.Y. Refractivity-From-Clutter Capable, Software-Defined, Coherent-on-Receive Marine Radar. Radio Sci. 2021, 56, 1–19. [Google Scholar] [CrossRef]
- Zhou, S.; Gao, H.T.; Ren, F.Y. Pole Feature Extraction of HF Radar Targets for the Large Complex Ship Based on SPSO and ARMA Model Algorithm. Electronics 2022, 11, 1644. [Google Scholar] [CrossRef]
- Barcaroli, E.; Lupidi, A.; Facheris, L.; Cuccoli, F.; Chen, H.N.; Chandra, C.V. A Validation Procedure for a Polarimetric Weather Radar Signal Simulator. IEEE Trans. Geosci. Remote Sens. 2019, 57, 609–622. [Google Scholar] [CrossRef]
- Broschat, S.L. The small slope approximation reflection coefficient for scattering from a “Pierson-Moskowitz” sea surface. IEEE Trans. Geosci. Remote Sens. 1993, 31, 1112–1114. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.W.; Zhang, Y.S.; Li, Z.W.; Liu, B.Y.; Yin, B.; Wu, S.H. Small Angle Scattering Intensity Measurement by an Improved Ocean Scheimpflug Lidar System. Remote Sens. 2021, 13, 2390. [Google Scholar] [CrossRef]
- Posner, F.L. Spiky sea clutter at high range resolutions and very low grazing angles. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 58–73. [Google Scholar] [CrossRef]
- Ma, L.W.; Wu, J.J.; Zhang, J.P.; Wu, Z.S.; Jeon, G.; Tan, M.Z.; Zhang, Y.S. Sea Clutter Amplitude Prediction Using a Long Short-Term Memory Neural Network. Remote Sens. 2019, 11, 2826. [Google Scholar] [CrossRef] [Green Version]
- Weiner, M.M. Noise factor and antenna gains in the signal/noise equation for over-the-horizon radar. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 886–890. [Google Scholar] [CrossRef]
- Chen, H.W.; Li, X.; Jiang, W.D.; Zhuang, Z.W. MIMO Radar Sensitivity Analysis of Antenna Position for Direction Finding. IEEE Trans. Signal Process. 2012, 60, 5201–5216. [Google Scholar] [CrossRef]
- Kim, N.; Shin, D.; Choi, W.; Kim, G.; Park, J. Exploiting Retraining-Based Mixed-Precision Quantization for Low-Cost DNN Accelerator Design. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2925–2938. [Google Scholar] [CrossRef]
- Qiao, C.; Li, D.; Guo, Y.T.; Liu, C.; Jiang, T.; Dai, Q.H.; Li, D. Evaluation and development of deep neural networks for image super-resolution in optical microscopy. Nat. Methods 2021, 18, 194–202. [Google Scholar] [CrossRef]
- Ren, F.Y.; Gao, H.T.; Yang, L.J. Distributed Multistatic Sky-Wave Over-The-Horizon Radar Based on the Doppler Frequency for Marine Target Positioning. Electronics 2021, 10, 1472. [Google Scholar] [CrossRef]
- Piwowarski, P.; Kasprzak, W. Evaluation of Multi-Stream Fusion for Multi-View Image Set Comparison. Appl. Sci. 2021, 11, 5863. [Google Scholar] [CrossRef]
- Yan, Q.S.; Gong, D.; Zhang, Y.N. Two-Stream Convolutional Networks for Blind Image Quality Assessment. IEEE Trans. Image Process. 2019, 28, 2200–2211. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 9410 MHz |
| Transmitter power | 73.9 dBm |
| Transmitting antenna gain | 41.4 dB |
| Antenna height | 4 m |
| Elevation | 0° |
| Polarization | VV |
| Indicator | EDH (m) | Error (m) | |
|---|---|---|---|
| Sea Clutter Inversion | Joint Inversion | ||
| RMSE | (0,16.7] | 1.434 | 0.657 |
| (16.7,40) | 0.741 | 0.621 | |
| (0,40) | 1.081 | 0.636 | |
| MAE | (0,16.7] | 1.158 | 0.505 |
| (16.7,40) | 0.587 | 0.481 | |
| (0,40) | 0.822 | 0.491 | |
| Reference EDH | Result | Error (m) |
|---|---|---|
| d = 8.70 | 9.26 | 0.56 |
| d = 14.56 | 15.45 | 0.89 |
| d = 25.33 | 26.58 | 1.25 |
| d = 32.36 | 32.19 | 0.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, H.; Yin, B.; Zhang, J.; Zhang, Y. Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning. Electronics 2022, 11, 2157. https://doi.org/10.3390/electronics11142157
Ji H, Yin B, Zhang J, Zhang Y. Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning. Electronics. 2022; 11(14):2157. https://doi.org/10.3390/electronics11142157
Chicago/Turabian StyleJi, Hanjie, Bo Yin, Jinpeng Zhang, and Yushi Zhang. 2022. "Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning" Electronics 11, no. 14: 2157. https://doi.org/10.3390/electronics11142157
APA StyleJi, H., Yin, B., Zhang, J., & Zhang, Y. (2022). Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning. Electronics, 11(14), 2157. https://doi.org/10.3390/electronics11142157