
Modeling of Satellite Constellation in Modelica and a PHM System Framework Driven by Model Data Hybrid


Abstract
:1. Introduction
2. Unified Modeling of LEO Satellite Constellation
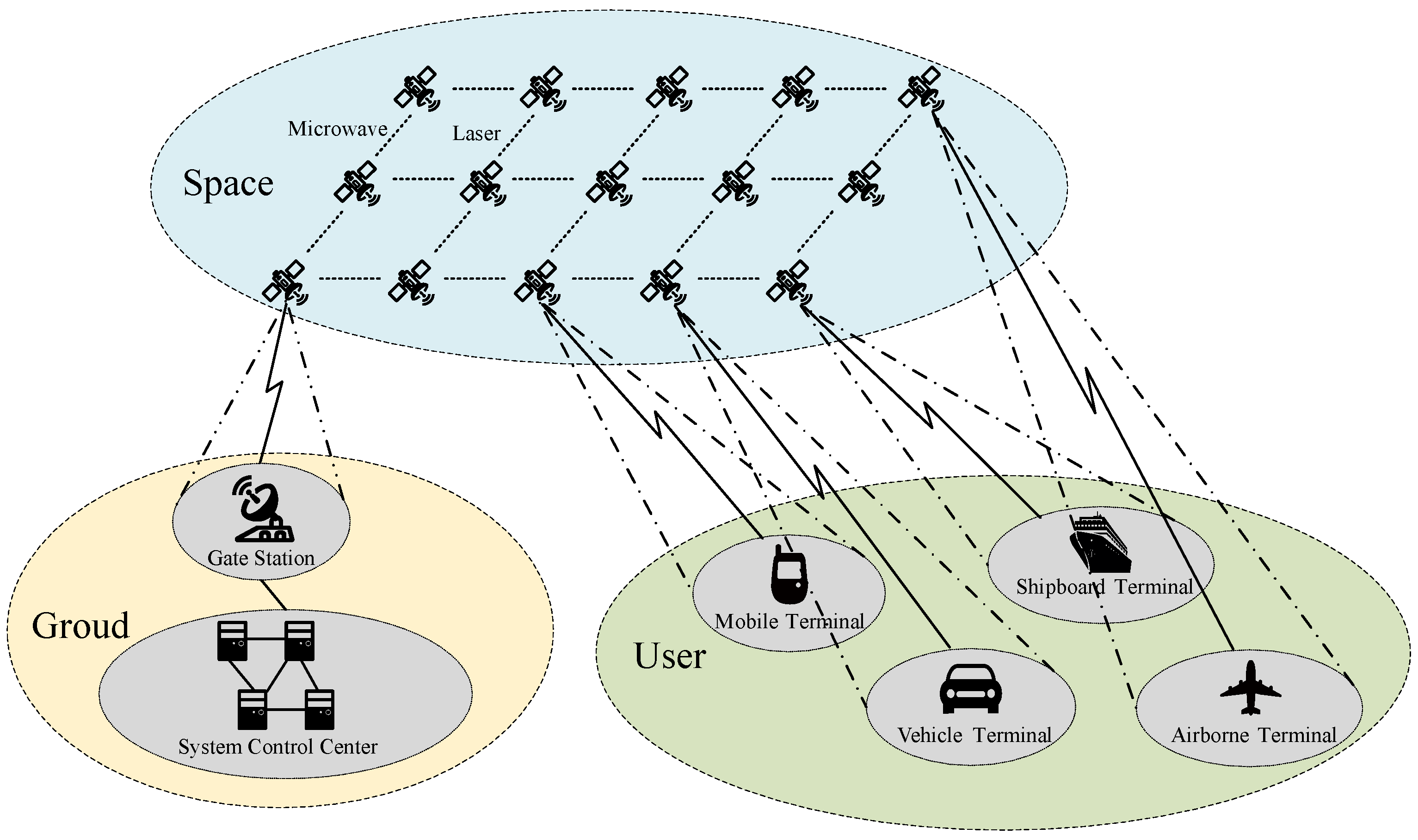
2.1. System Principle
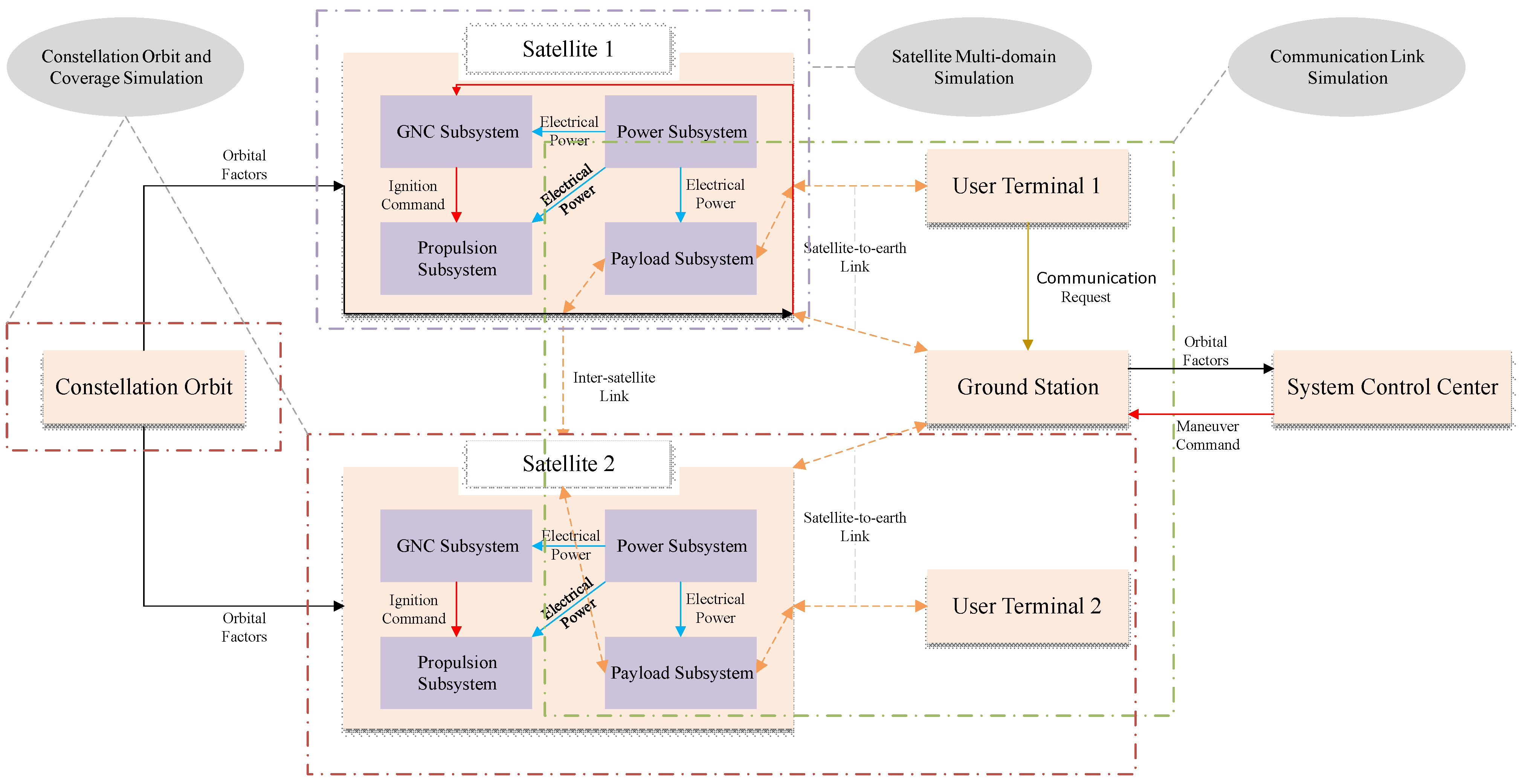
2.2. Model Architecture
- Black solid lines represent the orbital information interface for all satellites, calculated by the constellation system model based the given constellation design parameters and then transmitted to the ground station and system control center via a satellite-to-ground link.
- Red solid lines represent the command interface of the satellite maneuvers, which are generated by the system control center according to the configuration changes of the constellation to control the on-off of the satellite orbital engine and maintain the constellation configuration.
- Blue solid lines represent the energy interface, through which the electrical power generated by the solar panel is sent to other subsystems.
- Brown solid lines mean the communication request interface, which contains the communication type and the latitude and longitude information of the originating terminal and the ending terminal.
- Orange dashed lines represent the link interface, which includes information such as link margin, time delay, bandwidth ratio, etc., calculated by the link models.
2.3. Model Implementation Based on Modelica
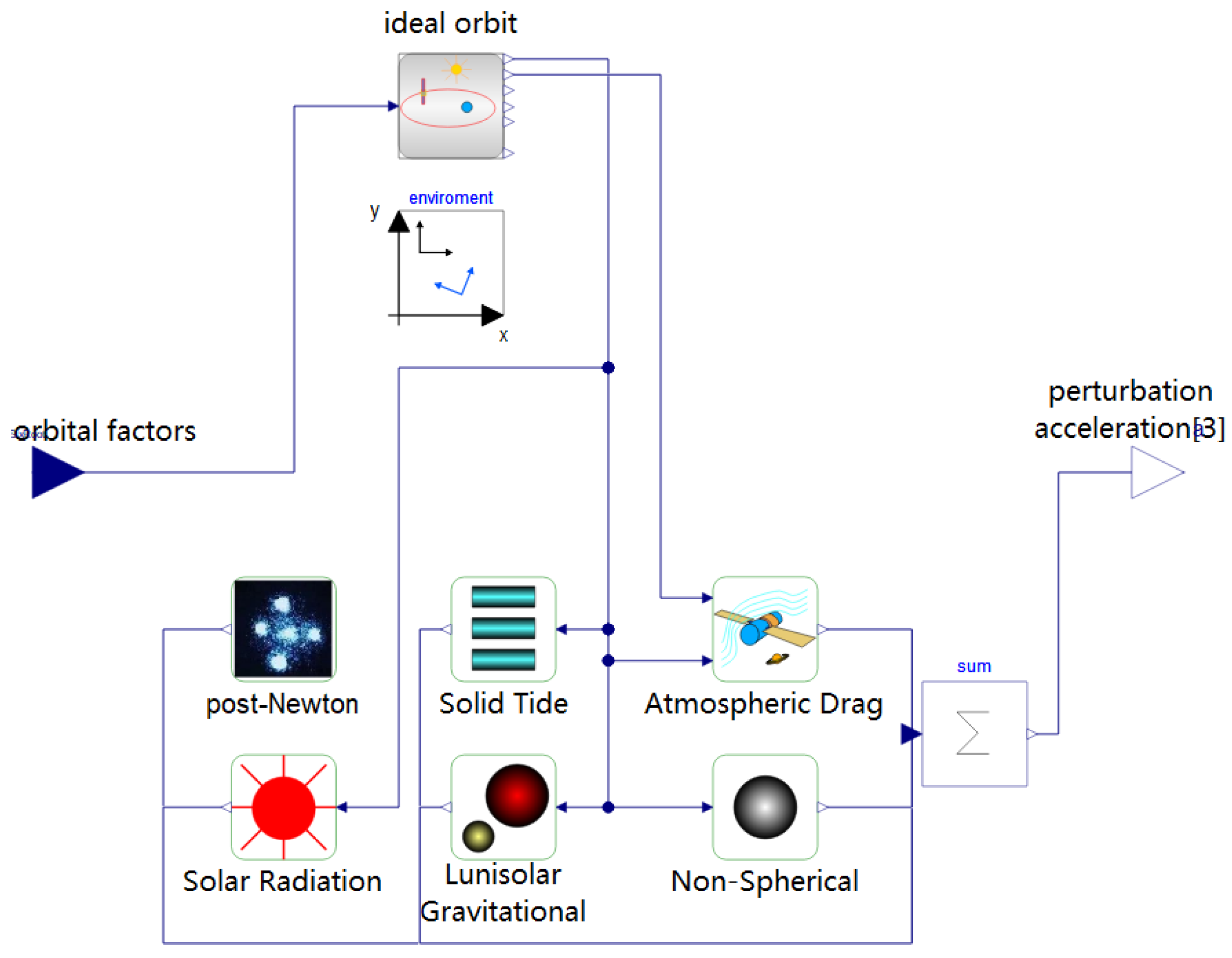
2.3.1. Orbit Model
- Nonspherical gravitational perturbation.
- Atmospheric drag perturbation.
- Lunisolar gravitational perturbation.
- Solar radiation perturbation.
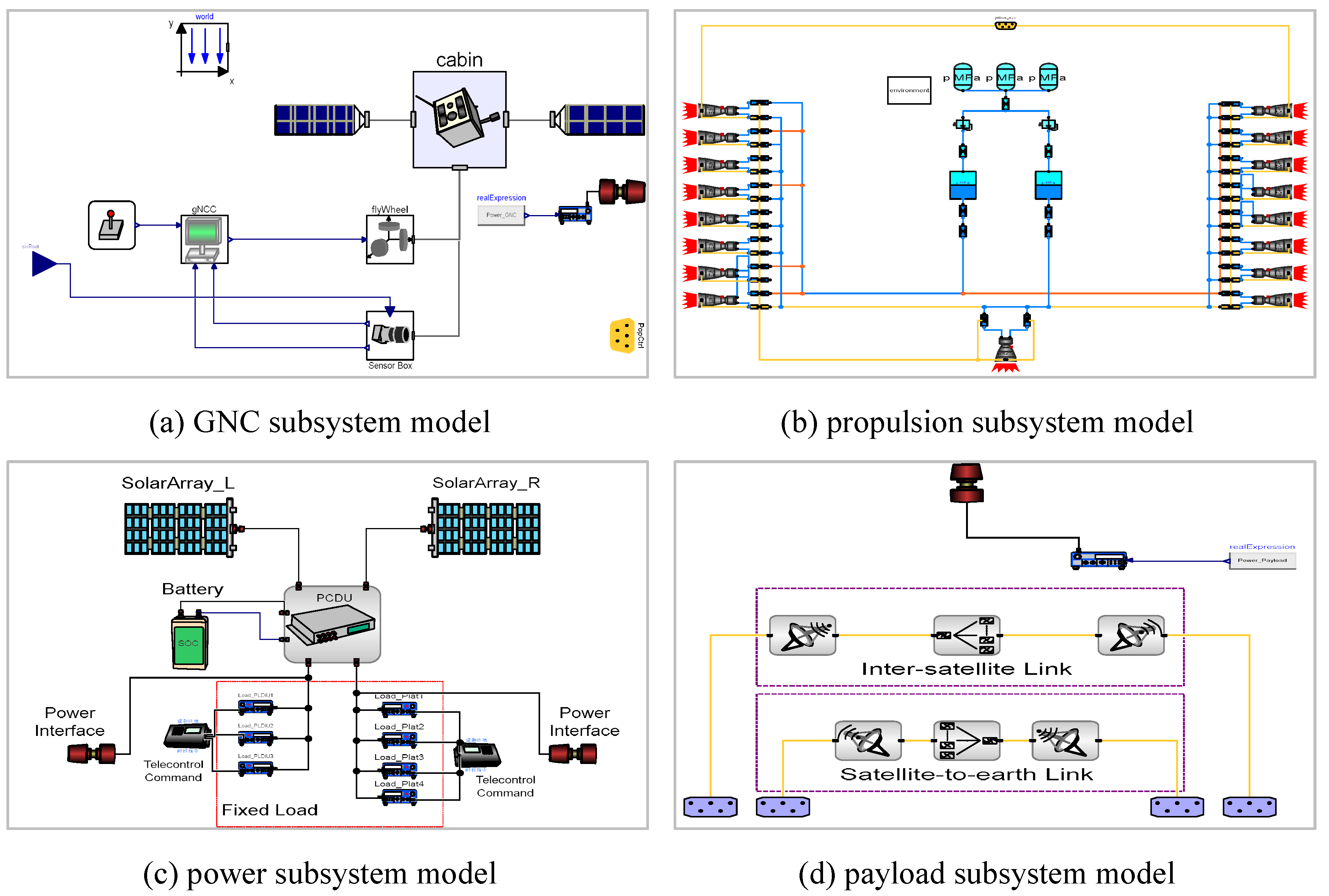
2.3.2. Satellite Model
2.3.3. System Control Center Model
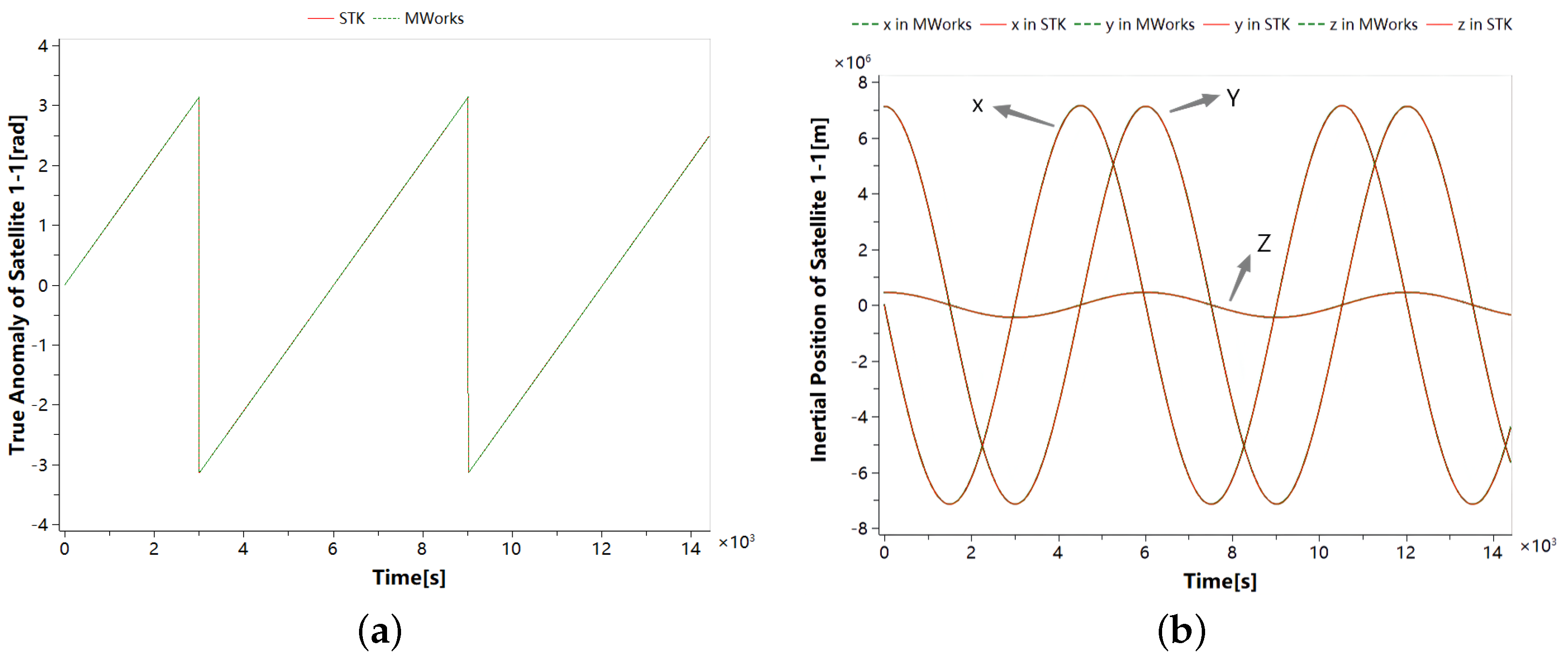
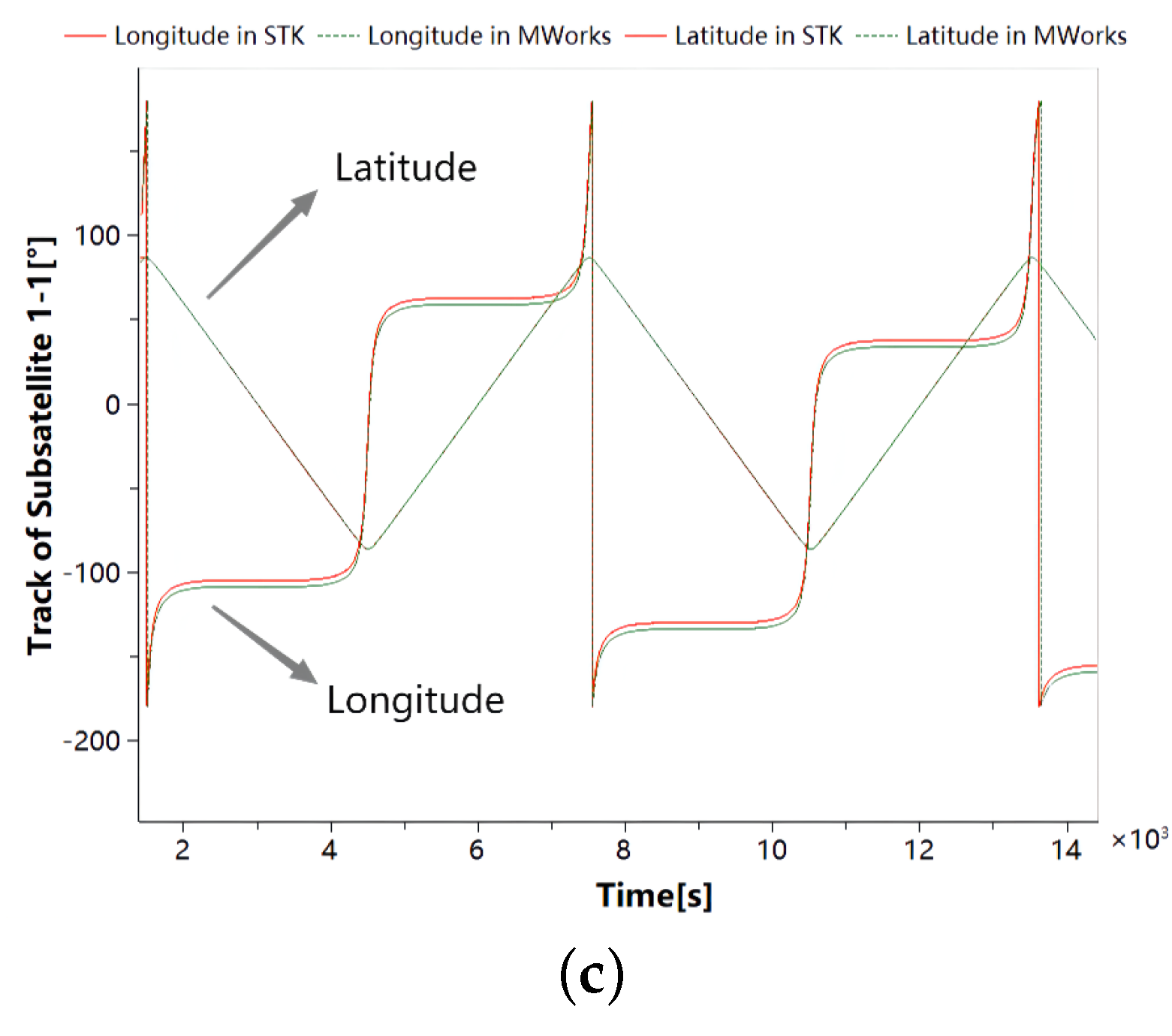
2.4. Satellite Constellation Model Validation
3. PHM System Driven by Model Data Hybrid
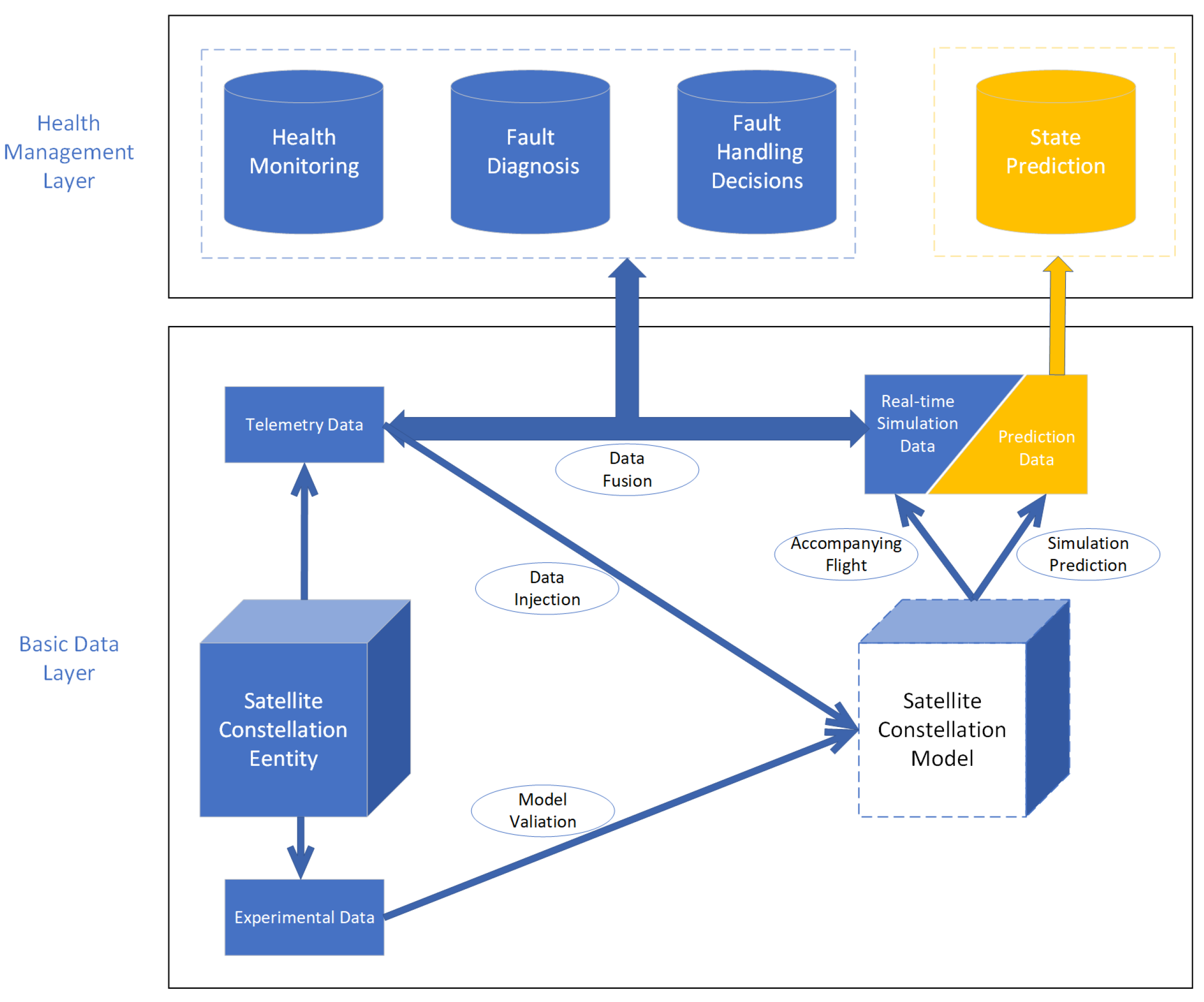
3.1. System Architecture
3.1.1. Basic Data Layer
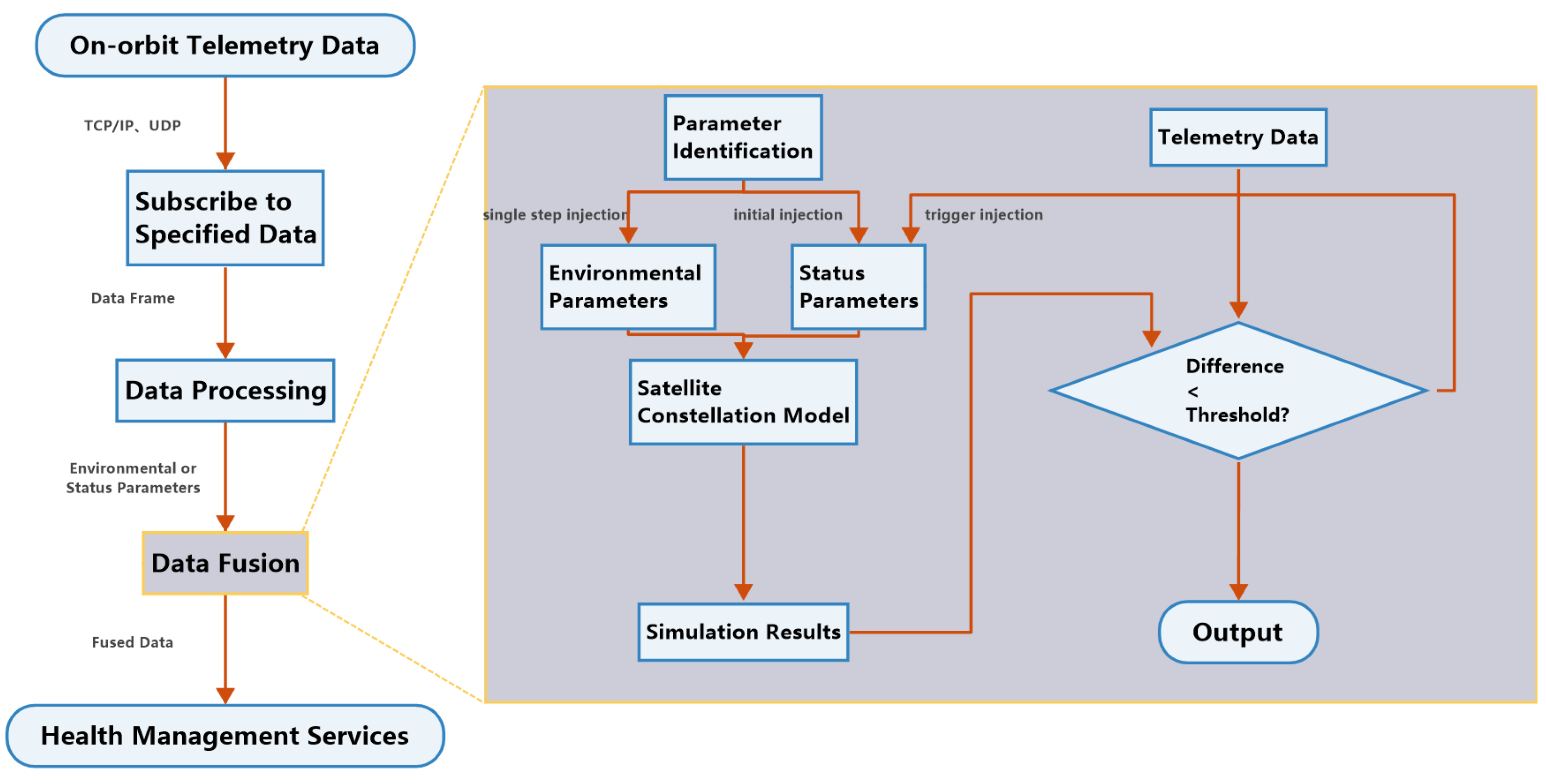
- Data injection. On the one hand, the constellation on-orbit telemetry data (including environmental parameters, orbital parameters and system parameters) are received through the telemetry data interface module and parsed into engineering values with practical physical meanings. On the other hand, command data that drive model state transitions are generated by the event schedule from mission planning. According to the mapping relationship between the data and model variables, the telemetry data and command data are injected into the model to drive the simulation.
- Model synchronization. The injection of real-time telemetry data into the digital model can ensure that the status of the constellation in the digital space is consistent with the physical entity, so as to obtain high-fidelity and more comprehensive state data and support real-time state monitoring, fault diagnosis and other services.
- Simulation prediction. On the basis of model synchronization, another simulation thread is started to perform over-real-time simulation to obtain the subsequent state change in the constellation.
3.1.2. Health Management Layer
- Health monitoring. The basis of the health management service is the real-time monitoring of the running status of the digital model of the satellite constellation. With the injection of real-time telemetry data, the digital model can track the dynamic changes of the physical entity. Then, simulation data, real data, and fused data between the two are extracted from digital models to fully reflect the running status of the constellation using visualization techniques. At the same time, the monitored data shall be interpreted in real time according to specific interpretation rules by means of threshold analysis and deviation analysis. If the data are judged to be abnormal, fault diagnosis shall be performed.
- Fault diagnosis. The fault diagnosis service is enabled when the health monitoring service has a fault warning. It analyzes the characteristics of the change process of abnormal telemetry parameters by combining abnormal telemetry parameters and the corresponding model simulation parameters. Then, using the simulation data as a reference, advanced fault identification algorithms are used to determine the faulty components and causes.
- Decision on fault handling. After the fault diagnosis service identifies the cause of the fault, the O&M personnel shall select a set of maintenance strategies from the prearranged maintenance plan and verify the effectiveness of such strategies on the digital model before implementation.
- Status prediction. Status prediction may occur in two scenarios: (1) Before executing a task, the O&M personnel obtain the running data of the next time period through status prediction and then evaluate the risk of the task based on the data and make predictive adjustments to the task plan. (2) The initial, inconspicuous fault features discovered by the health monitoring service may not be identified by the fault diagnosis algorithm. Through status prediction, more definite fault data can be obtained to support the fault diagnosis service.
4. Key Technology
4.1. Data Fusion
4.2. Health Monitoring
4.3. Fault Diagnosis
4.4. Status Prediction
4.5. Fault Handling Decision
5. Case Study: A PHM System for Satellite Constellation
5.1. System Model and Parameters
5.2. Results of PHM System
6. Discussion
- The multidomain characteristics of the satellite constellation system can be expressed through a unified language. The constellation model expressed in the unified language is more flexible and convenient for the design and verification of the constellation system and is more conducive to the knowledge accumulation of the design unit.
- The model–data-hybrid-driven PHM method has more advantages than the traditional data-driven PHM method, and its advantages are reflected in the model’s enhancement of data and the model’s predictive function.
- The data enhancement of the model is manifested in two aspects. One is the expansion of telemetry data from the time dimension and the number of variables in state monitoring. The other is that the model can generate a large amount of labeled data for training fault diagnosis algorithms, as a supplement to the experimental data.
- According to the existing research results, simulation prediction based on the mechanism model is more stable, reliable and generic than the data-based method.
- The work efficiency of fault diagnosis, state monitoring or state prediction is closely related to the accuracy of the model. High-fidelity models help improve the performance of PHM systems. In this example, the orbital data and the calculation results of the satellite energy system are satisfactory, but there are still large errors in the calculation results of the information link, so the construction of a high-fidelity model of the satellite constellation system requires further in-depth research.
- We hope to incorporate more efficient machine learning algorithms into the PHM framework proposed in this paper. Appropriate machine learning algorithms can play an active role in high-fidelity model construction, fault diagnosis and state prediction.
- Due to the limitations of PC performance, we tested a constellation of up to 1000 satellites, and although the simulation worked, the efficiency was unacceptably low. In order to solve the problem of simulation, we plan to adopt the scheme of distributed simulation. Distributed simulation may not be a good choice for energy-based interfaces because it requires decoupling the variables coupled inside the energy-based interface into two causal-type interfaces, which is detrimental to the solution of the model. However, for the satellite constellation, there is no energy exchange between satellites, only information transfer, which is completely suitable for the distributed simulation scheme. We only need to arrange one master and dozens of high-performance slaves in a local area network to achieve real-time simulation.
7. Conclusions
- A satellite constellation system model library has been developed in MWorks, which integrates the constellation orbit model, satellite multidomain model and communication link model. Based on this model library, a satellite constellation system can be built for ground coverage characteristic calculation and orbit control simulation, satellite energy balance simulation, link selection and margin calculation simulation.
- A PHM architecture for satellite constellation based on the Modelica model combined with a telemetry-data-driven model is proposed, which can also provide guidance for the design of a general spacecraft health management platform.
- Extracting the orbital parameters of the Iridium NEXT constellation and designing a verification example, it verifies the feasibility of building the constellation orbit model, satellite multidomain model and communication link model in a unified manner under the Modelica language and proves that the simulation model has a positive effect on the enhancement of telemetry data in the PHM of satellite constellation.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PHM | Prognostics and Health Management |
| CPS | Cyber-Physical Systems |
| LEO | Low Earth Orbit |
| O&M | Operation and Maintenance |
| ISL | Inter-Satellite Link |
| RAAN | Right Ascension of Ascending Node |
| OCSVM | One-Class Support Vector Machine |
| SVM | Support Vector Machine |
| OCC | One-Class Classification |
| AE | Auto-Encoder |
| CNN | Convolutional Neural Network |
| RNN | Recurrent Neural Network |
References
- Liu, W.; Tao, F.; Chen, J.; Zhang, L.; Yi, W. Digital Twin Satellite: Concept, Key Technologies and Applications. Comput. Integr. Manuf. Syst. 2020, 26, 565–588. [Google Scholar] [CrossRef]
- Zhou, D.; Sheng, M.; Hao, Q.; Li, J.; Liu, J. Network operation and maintenance and resource management and control technology of giant constellation system. Space-Integr.-Ground Inf. Netw. 2020, 1, 26–35. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=TDYT202001005&DbName=CJFQ2020 (accessed on 6 June 2022).
- Xiang, G.; Han, F.; Zhou, H. Data-driven method for spacecraft fault diagnosis: State of art and challenge. J. Electron. Meas. Instrum. 2021, 35, 1–16. [Google Scholar]
- Djebko, K.; Puppe, F.; Kayal, H. Model-based fault detection and diagnosis for spacecraft with an application for the SONATE triple cube nano-satellite. Aerospace 2019, 6, 105. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Xia, N.; Du, Q. Application research of spacecraft electrical power system digital accompanying flight technology. Spacecr. Eng. 2020, 29, 135–141. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=HTGC202005021&DbName=CJFQ2020 (accessed on 6 June 2022).
- Suo, M.; Zhu, B.; An, R.; Sun, H.; Xu, S.; Yu, Z. Data-driven fault diagnosis of satellite power system using fuzzy Bayes risk and SVM. Aerosp. Sci. Technol. 2019, 84, 1092–1105. [Google Scholar] [CrossRef]
- Shangguan, D.; Chen, L.; Ding, J. A Digital Twin-Based Approach for the Fault Diagnosis and Health Monitoring of a Complex Satellite System. Symmetry 2020, 12, 1307. [Google Scholar] [CrossRef]
- Zhang, H. Research on Multi-Domain Modeling and Simulation Method of Satellite Based on Modelica. Ph.D. thesis, Harbin Institute of Technology, Harbin, China, 2009. [Google Scholar]
- Shum, J. Model-Based Design of a Satellite with Orthogonal Spinning Sensors. Master’s Thesis, University of California, Los Angeles, CA, USA, 2017. [Google Scholar]
- Liu, Y.; Shangguan, D.; Yao, J.; Chen, L.; Ding, J. Modeling and Simulation of Satellite Attitude Dynamics and Control System using Modelica. J. Phys. Conf. Ser. 2019, 1215, 12–14. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Feng, X.; Dai, J. Review on satellite constellation design and simulation software. Comput. Mod. 2019, 8, 63–68. [Google Scholar]
- Wang, Q.; Xie, C.; Dong, J.; Wang, G. Simulation and analysis of GPS m-code satellite constellation performance based on STK. In Proceedings of the 12th China Satellite Navigation Annual Conference, Nanchang, China, 26 May 2021. [Google Scholar]
- Hu, C.; Huang, S.; Wang, L.; Meng, X. OPNET-based simulation of LEO satellite communication system. Commun. Technol. 2018, 51, 2382–2388. [Google Scholar]
- Li, Z.; Sun, J.; Shang, W.; Kou, D. The progresses and inspirations of international major satellite internet service LEO constellation. Aerosp. China 2020, 7, 48–51. [Google Scholar]
- Liu, C.; Qian, Y.; Chen, L.; Qu, Y.; Zhou, F. Modelica-based modeling on LEO satellite constellation. In Proceedings of the 14th International Modelica Conference, Linköping, Sweden, 20–24 September 2021. [Google Scholar]
- Dai, C.; Zhang, M.; Chong, L. QoE-Aware Intelligent Satellite Constellation Design in Satellite Internet of Things. IEEE Internet Things J. 2021, 8, 4855–4867. [Google Scholar] [CrossRef]
- Chen, C.; Lin, Y. A novel design method for the constellation configuration stability considering the perturbation influence. Aerosp. Shanghai 2020, 37, 33–37. [Google Scholar]
- Zhang, F.; Zhang, X.; Gao, X. Selection of Perturbation Models in Dynamic Orbit Determination of Earth Satellites. Aerosp. Control 2021, 39, 43–50. [Google Scholar]
- Yan, J. Research on the IP Routing in LEO Satellite Constellation Networks. Ph.D. Thesis, Tsinghua University, Beijing, China, 2010. [Google Scholar]
- Yuri, U. Long-Term formation keeping of satellite constellation using linear-quadratic controller. J. Guid. Control. Dyn. 1998, 21, 109–115. [Google Scholar]
- Liang, K.; Deng, K.; Ding, R. Autonomous on-orbit health management architecture and key technologies for manned spacecrafts. Manned Spacefl. 2014, 20, 116–121. [Google Scholar]
- Huang, N.; Chen, H. Mechanical fault diagnosis of high voltage circuit breakers based on wavelet time-frequency entropy and one-class support vector machine. Entropy 2016, 18, 7. [Google Scholar] [CrossRef] [Green Version]
- Anaissi, A.; Lu Dang Khoa, N. Automated parameter tuning in one-class support vector machine: An application for damage detection. Int. J. Data Sci. Anal. 2018, 6, 311–325. [Google Scholar] [CrossRef]
- Zhu, X.; Cheng, Y. Steady-state process fault detection for liquid rocket engines based on convolutional auto-encoder and one-class support vector machine. IEEE Access 2020, 8, 3144–3158. [Google Scholar] [CrossRef]
- Fu, S. Spacecraft Fault Diagnosis Based on Artifici-Al Intelligence. Ph.D. Thesis, Xidian University, Xi’an, China, 2019. [Google Scholar]
- Xiang, G.; Tao, R.; Qu, C. Improved variational autoencoder and its application in spacecraft fault detection. J. Northwestern Polytech. Univ. 2020, 38, 90–95. [Google Scholar]
- Cao, S. Research on Data Imbalance Fault Diagno-Sis Method Based on Convolutional Neural Network; Huazhong University of Science and Technology: Wuhan, China, 2020. [Google Scholar]
- Du, J.; Liu, Z.; Song, K. Fault diagnosis of pumping unit based on convolutional neural network. J. Univ. Electron. Sci. Technol. 2020, 49, 751–757. [Google Scholar]
- Jin, X.; Yun, W.; Han, S. Research on noise reduction method of gyroscope based on deep recurrent neural network. Aerosp. Control. Appl. 2020, 46, 65–72. [Google Scholar]
- Iridium Next Engineering Statement. Available online: https://fcc.report/IBFS/SAT-MOD-20131227-00148/1031348.pdf (accessed on 2 June 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Names | Functions |
|---|---|
| Ground station | Uplink and downlink data forwarding |
| System control center | Generating satellite maneuver command to maintain the stability of constellation configuration |
| Satellite system | The simulation of the operational status of the four subsystems of satellite energy, control, propulsion and payload |
| User terminal | Generating communication requests and sending or receiving communication data |
| Satellite–ground link | The transmission of data between satellite and ground and the calculation of time delay and communication margin |
| Intersatellite link | The transmission of data between satellites and the calculation of time delay and communication margin |
| Constellation system | The calculation of the trajectories of each satellite within the constellation according to the constellation design parameters |
| Parameter | Value |
|---|---|
| Number of orbital planes | 6 |
| Number of satellites per plane | 11 |
| Inclination | |
| Eccentricity | 0.00126 |
| Argument of perigee | |
| Ascending node | |
| Mass of satellite | 900 Kg |
| Max flywheel torque | 32 N·m |
| Thrust of thruster | 5 N |
| Maximum power generation | 3200 W |
| Bus voltage | 28 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Chen, L.; Ding, J.; Shangguan, D. Modeling of Satellite Constellation in Modelica and a PHM System Framework Driven by Model Data Hybrid. Electronics 2022, 11, 2155. https://doi.org/10.3390/electronics11142155
Liu C, Chen L, Ding J, Shangguan D. Modeling of Satellite Constellation in Modelica and a PHM System Framework Driven by Model Data Hybrid. Electronics. 2022; 11(14):2155. https://doi.org/10.3390/electronics11142155
Chicago/Turabian StyleLiu, Chan, Liping Chen, Jianwan Ding, and Duansen Shangguan. 2022. "Modeling of Satellite Constellation in Modelica and a PHM System Framework Driven by Model Data Hybrid" Electronics 11, no. 14: 2155. https://doi.org/10.3390/electronics11142155
APA StyleLiu, C., Chen, L., Ding, J., & Shangguan, D. (2022). Modeling of Satellite Constellation in Modelica and a PHM System Framework Driven by Model Data Hybrid. Electronics, 11(14), 2155. https://doi.org/10.3390/electronics11142155