
Optimization of Fuzzy Controller for Predictive Current Control of Induction Machine



Abstract
:1. Introduction
2. Induction Machine Model and Control Overview
3. Fuzzy Logic Controller
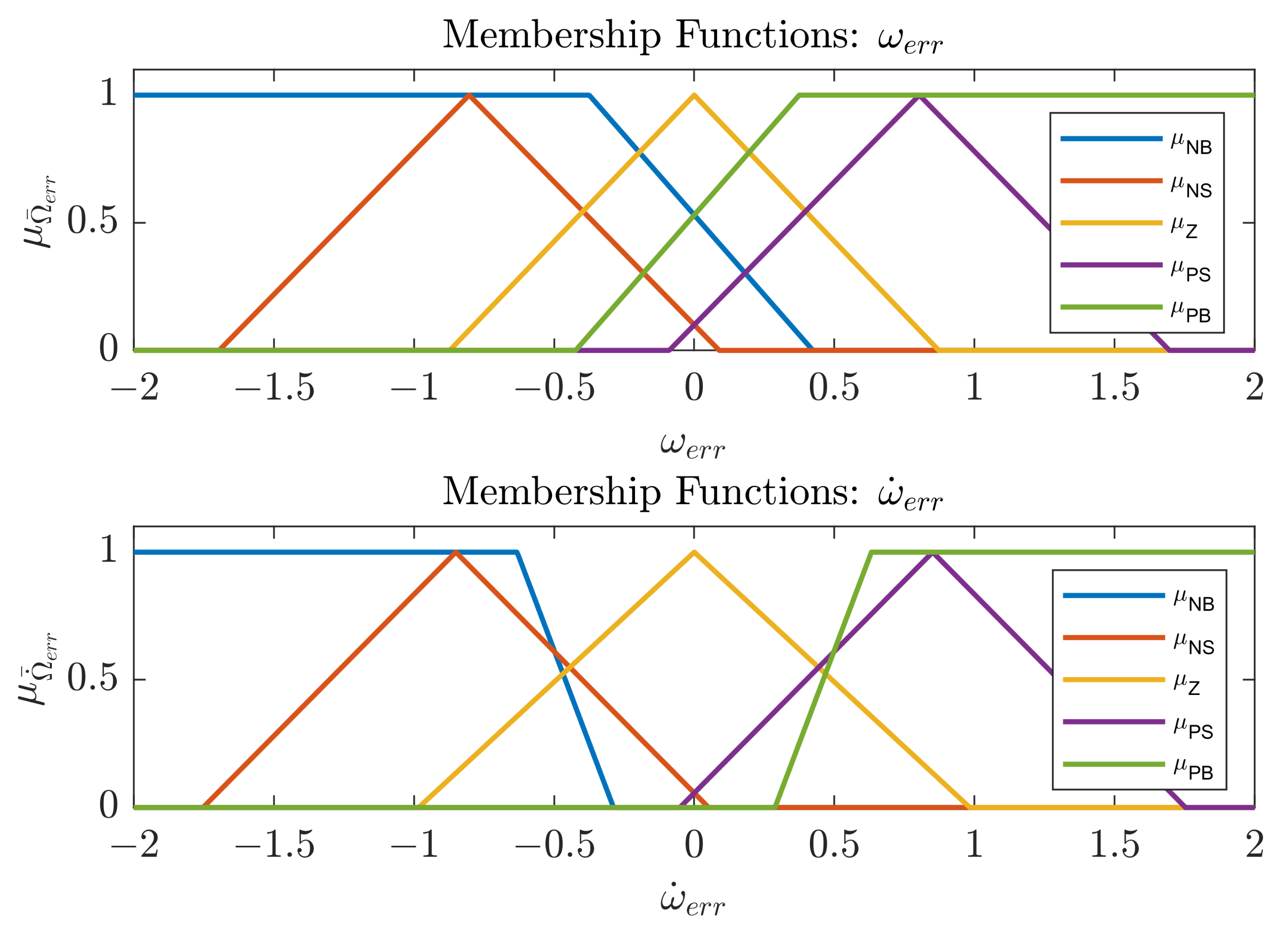
3.1. Input and Output of Fuzzy Controller
- ,
- ["Speed Error" "Speed Error Derivative"],
- {"Negative Big", "Negative Small", "Zero", "Positive Small", "Positive Big"},
- ,
- ["Fuzzy Error"],
- {"Negative", "Zero", "Positive"}.
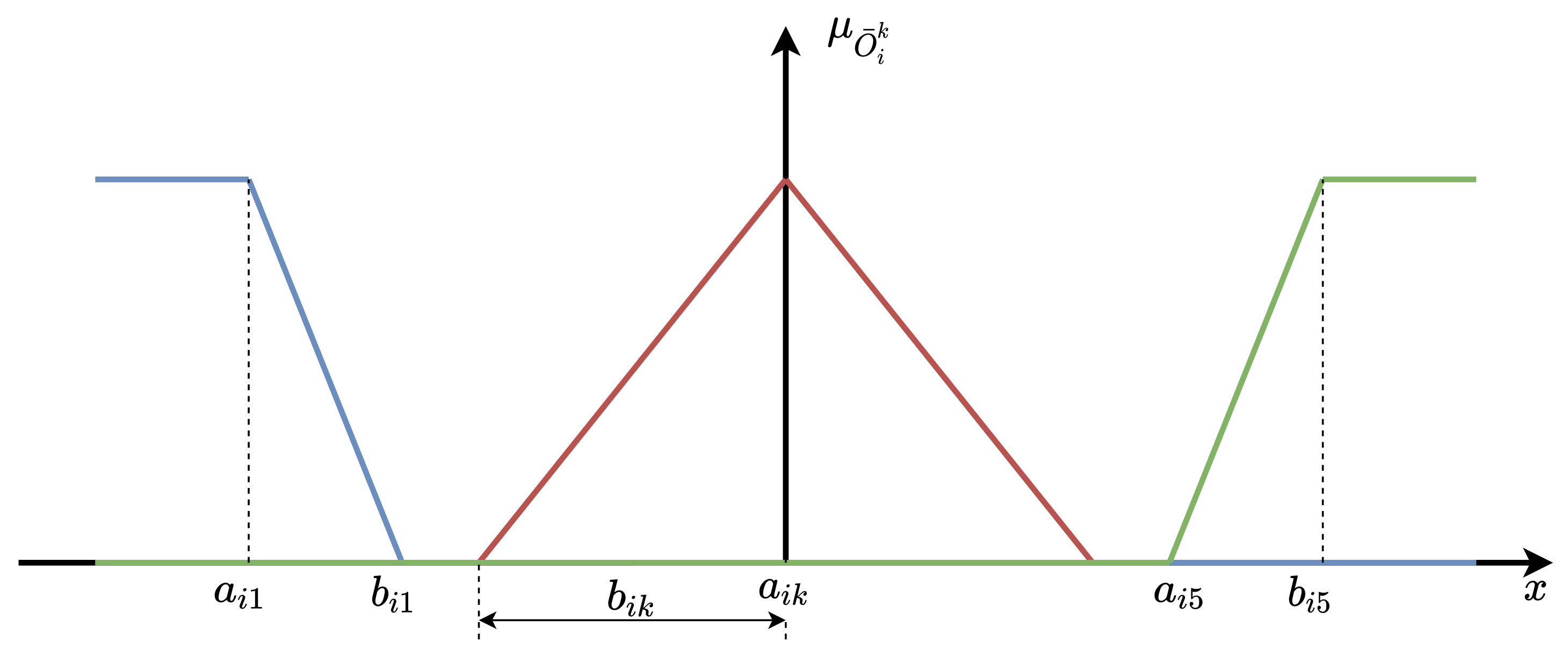
3.2. Input Membership Functions
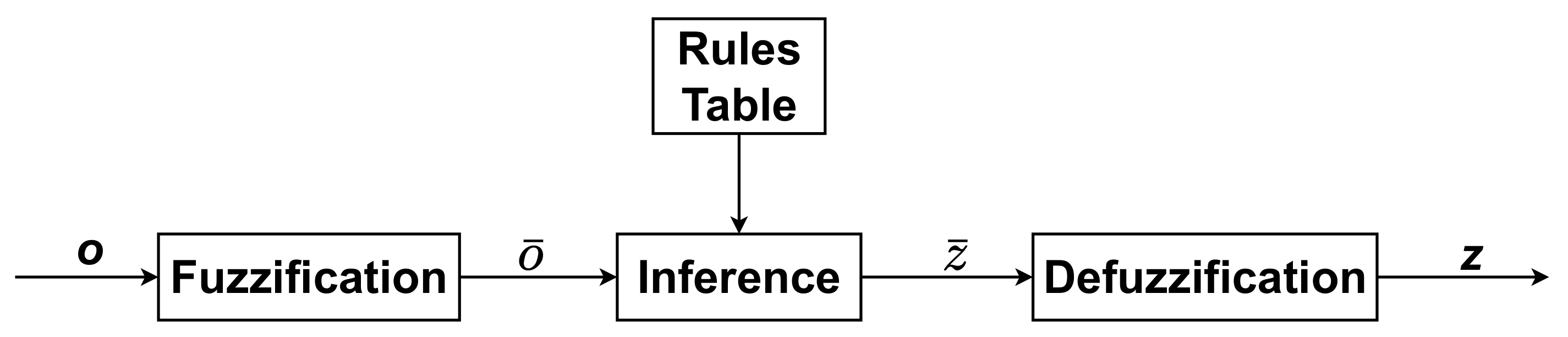
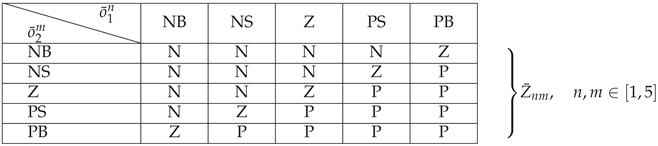
3.3. Fuzzy Inference
3.4. Defuzzification
4. Optimization of Fuzzy Logic Controller
4.1. Problem Statement
4.2. Objective Function
4.3. Decision Variables
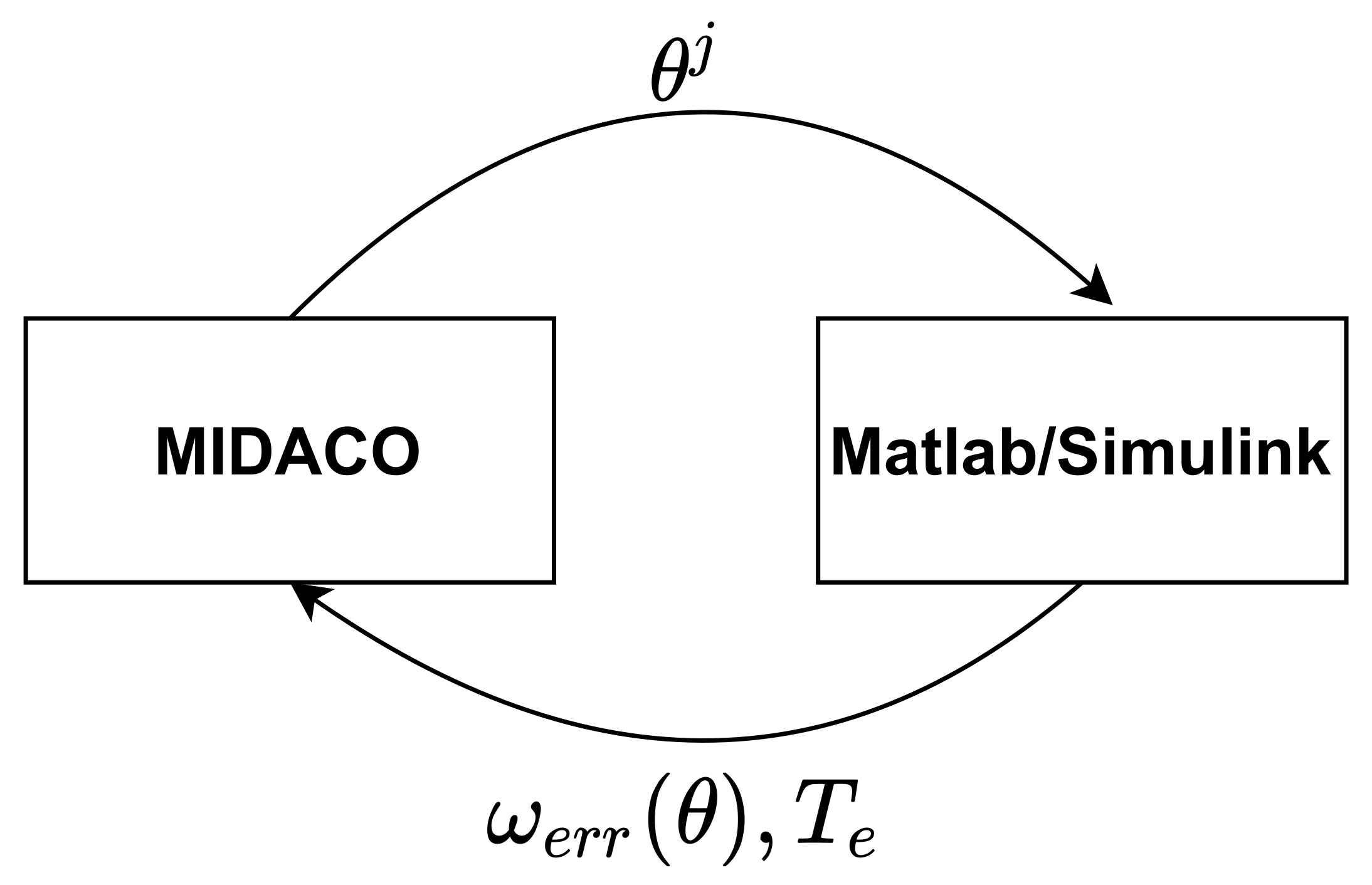
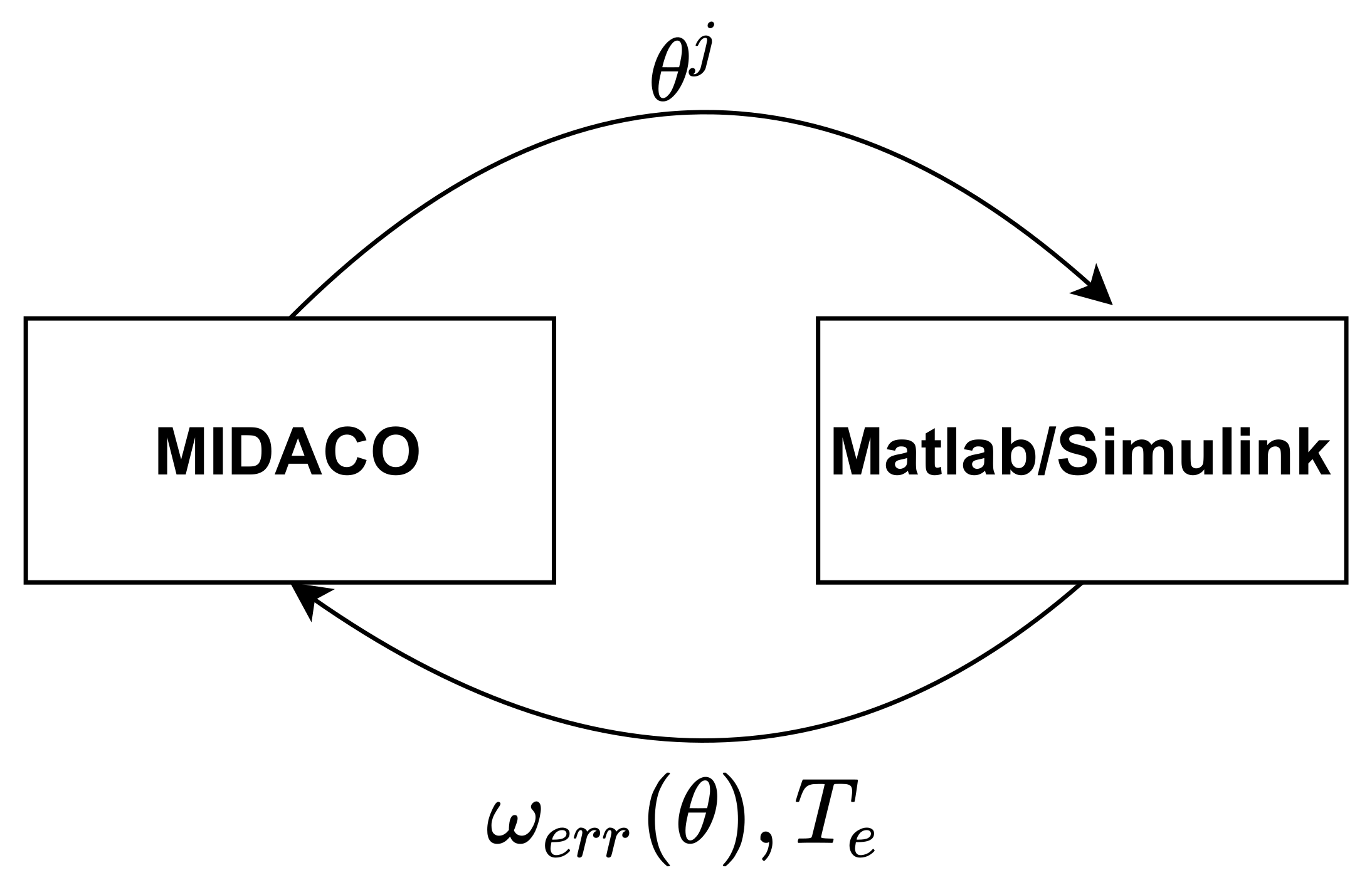
4.4. MIDACO Optimizer
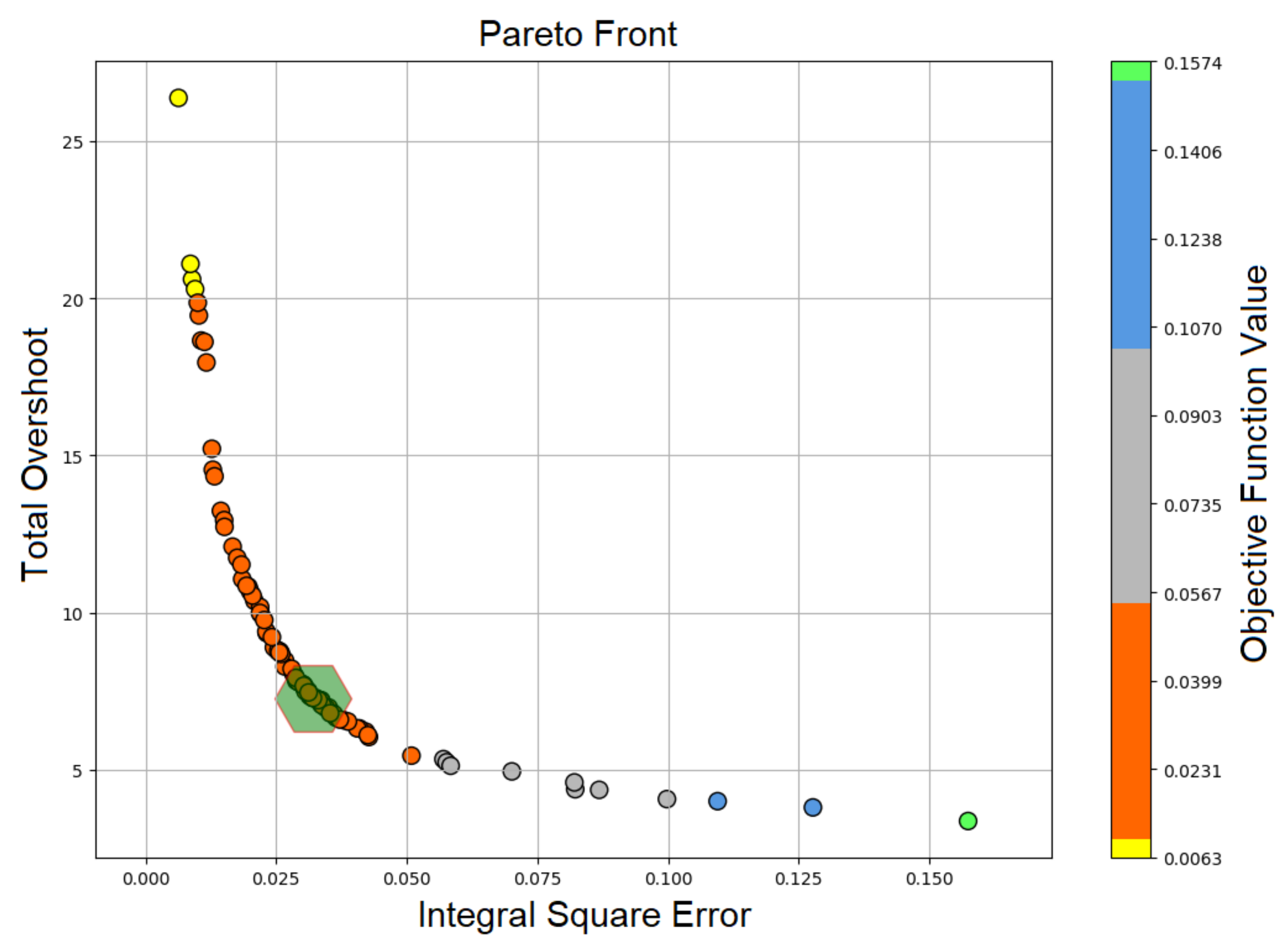
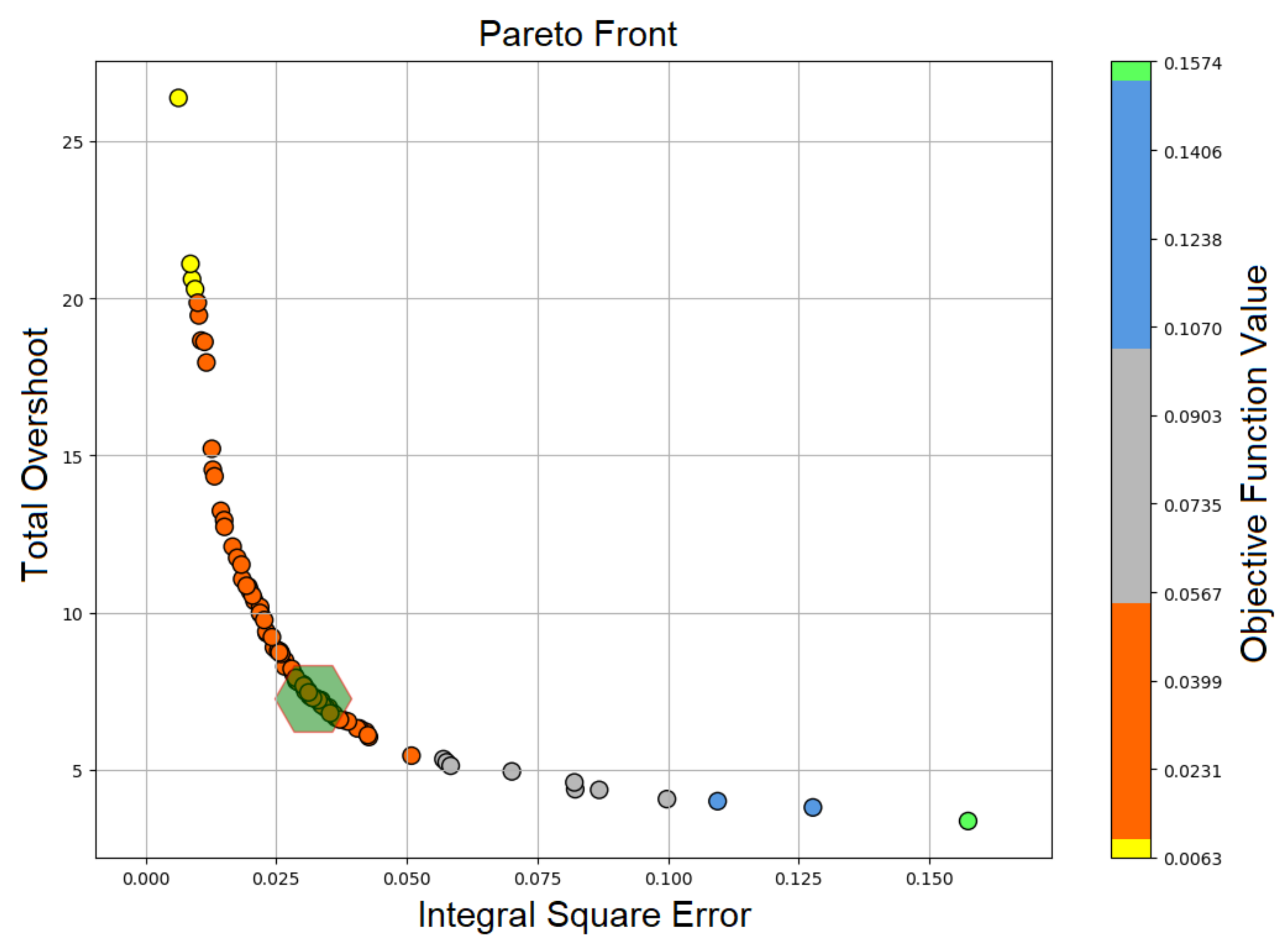
5. Optimization Results
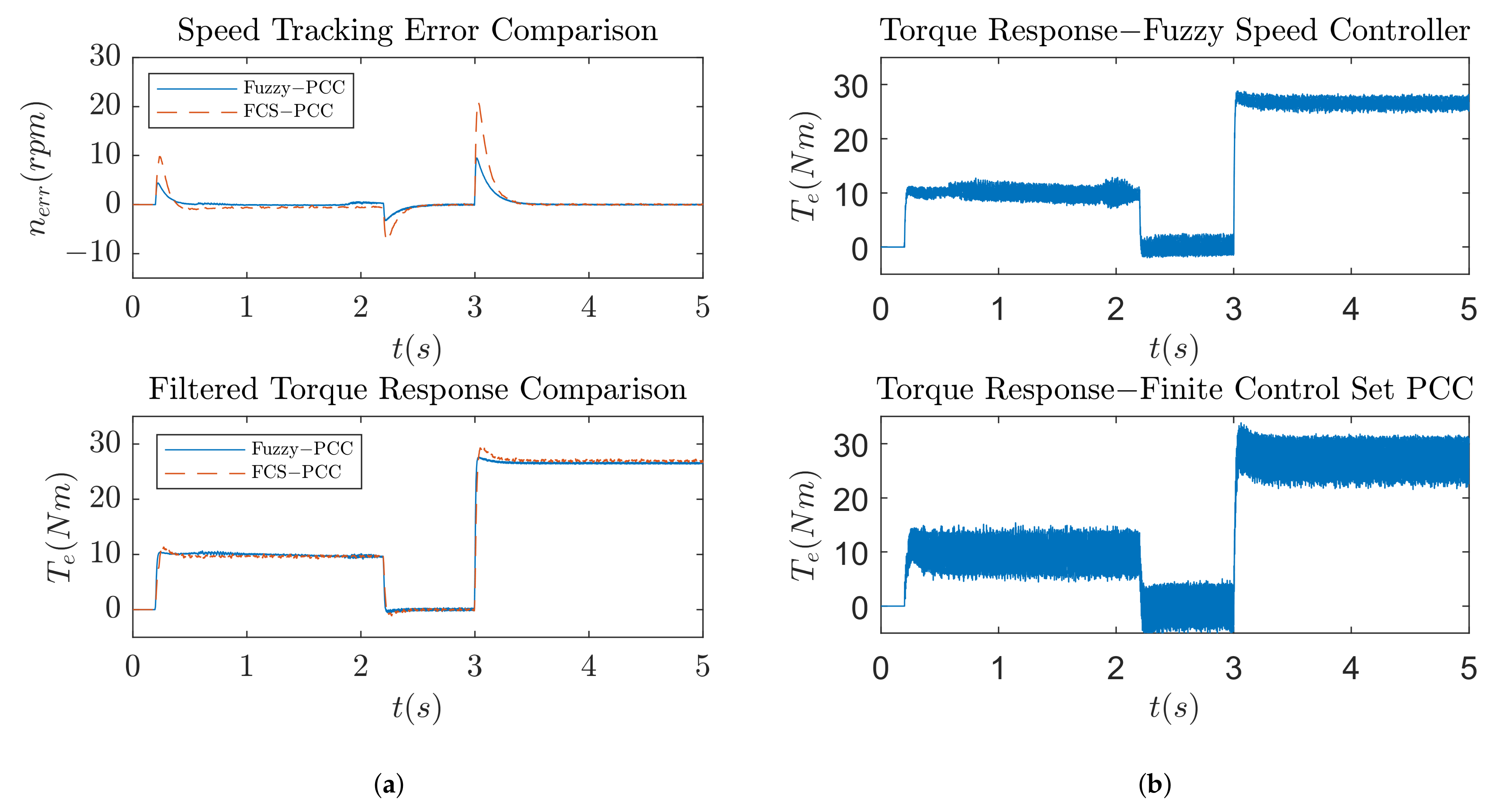
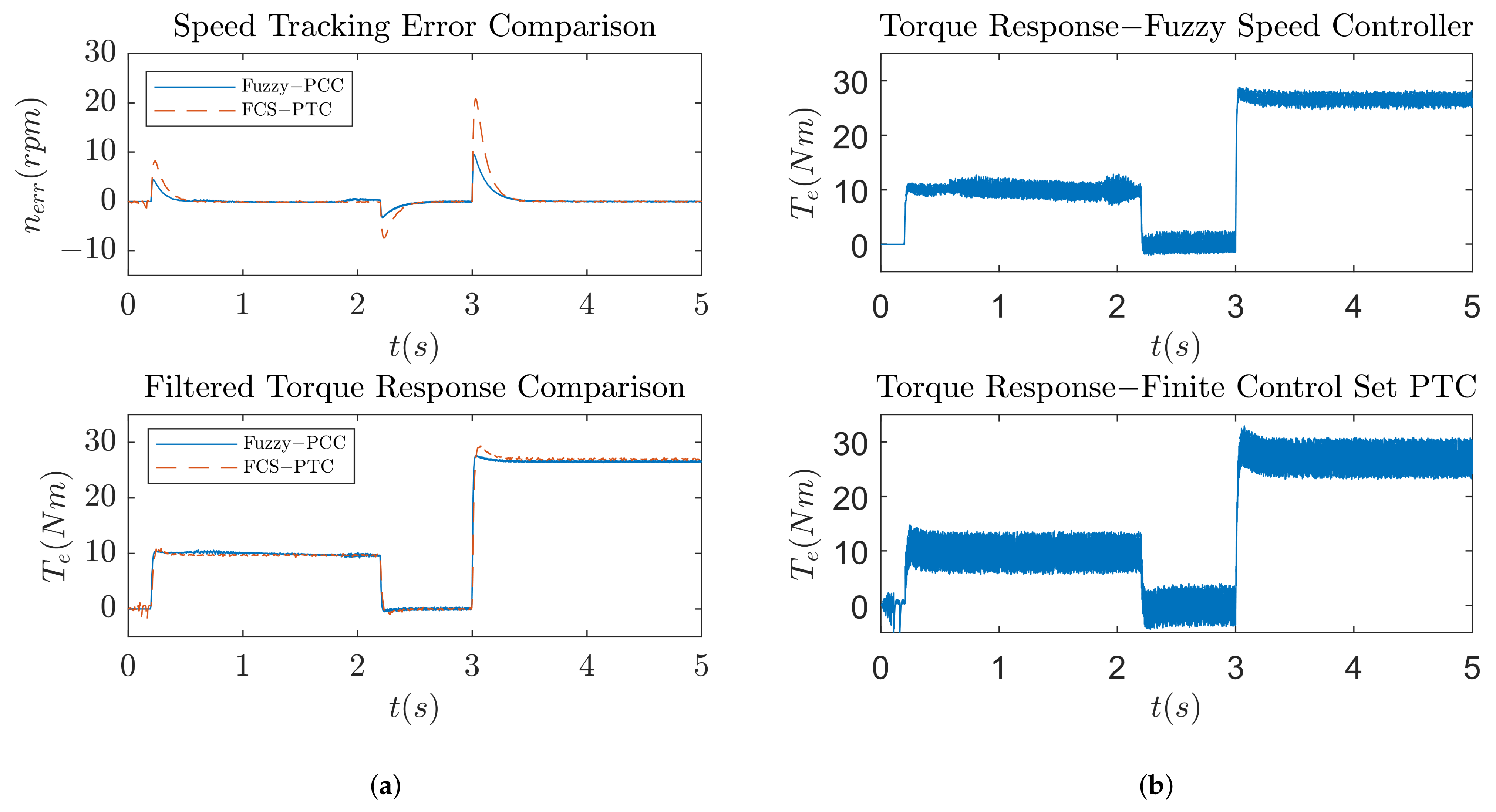
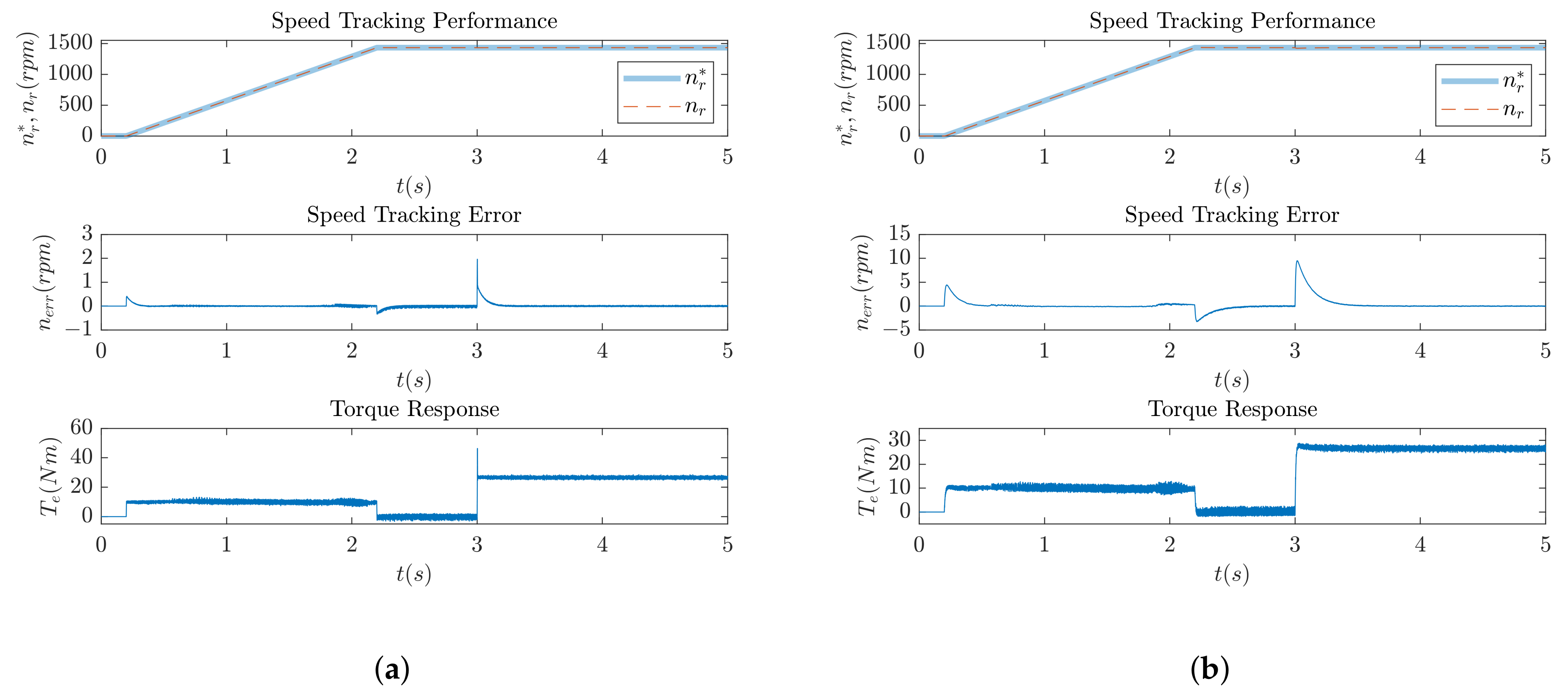
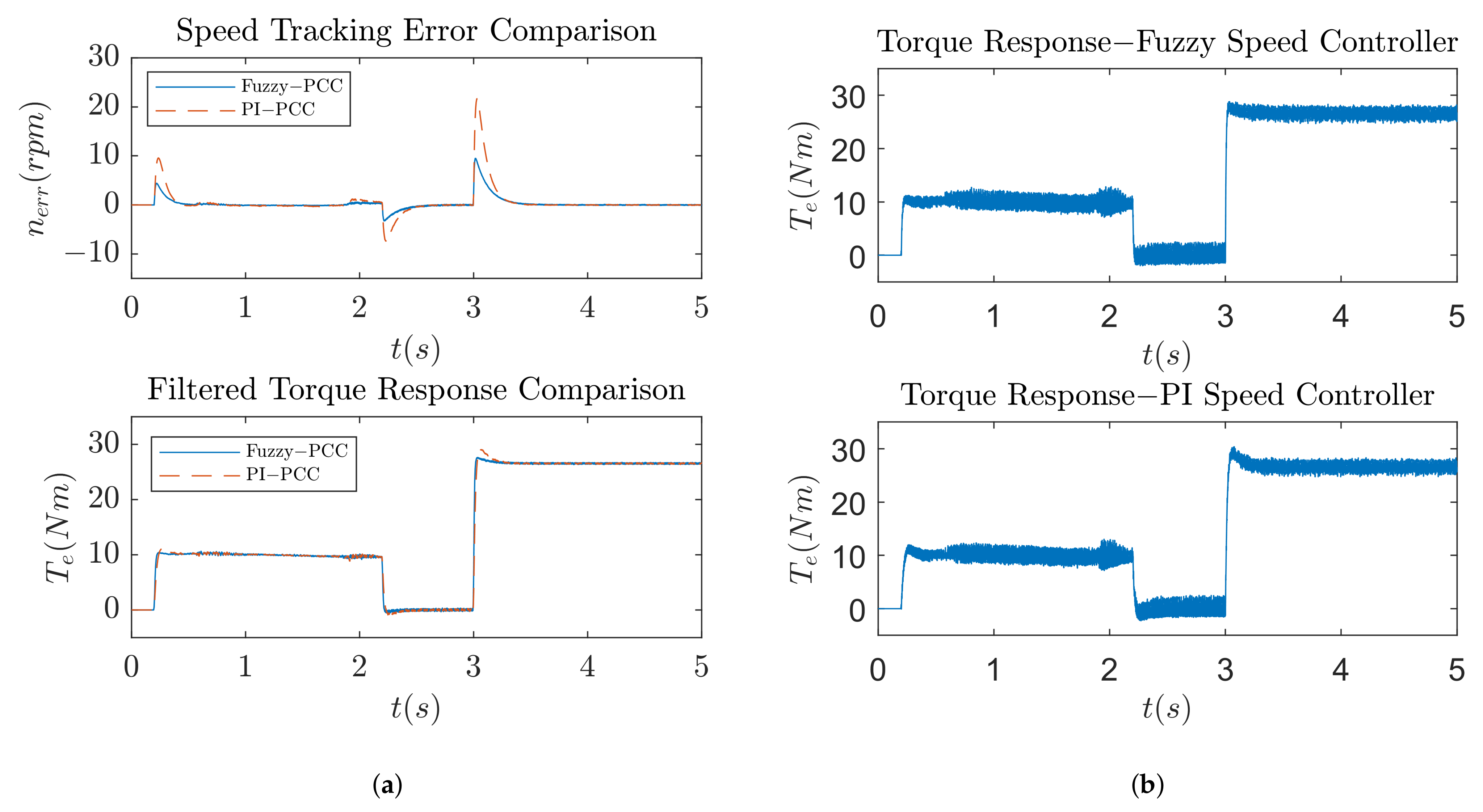
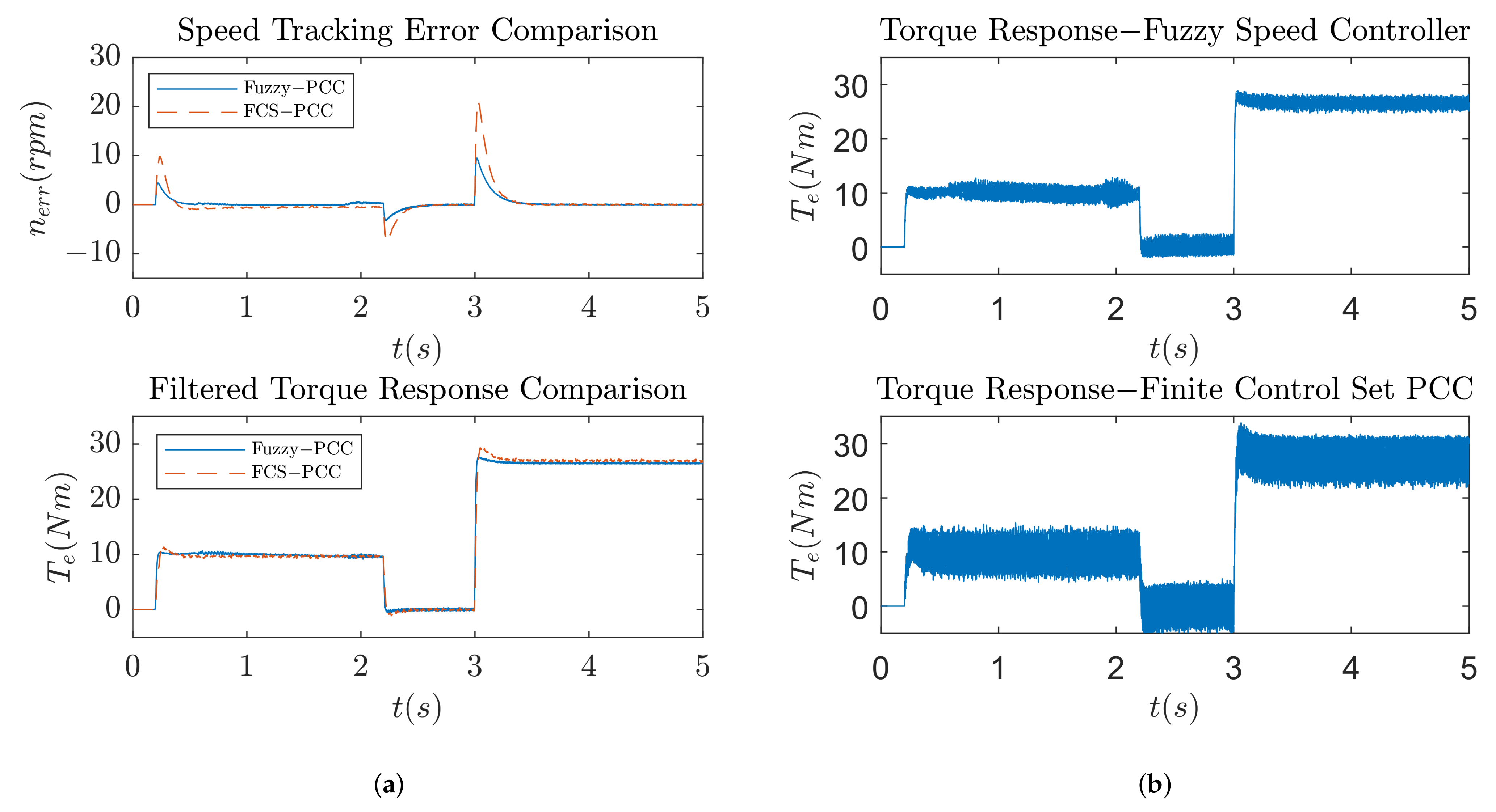
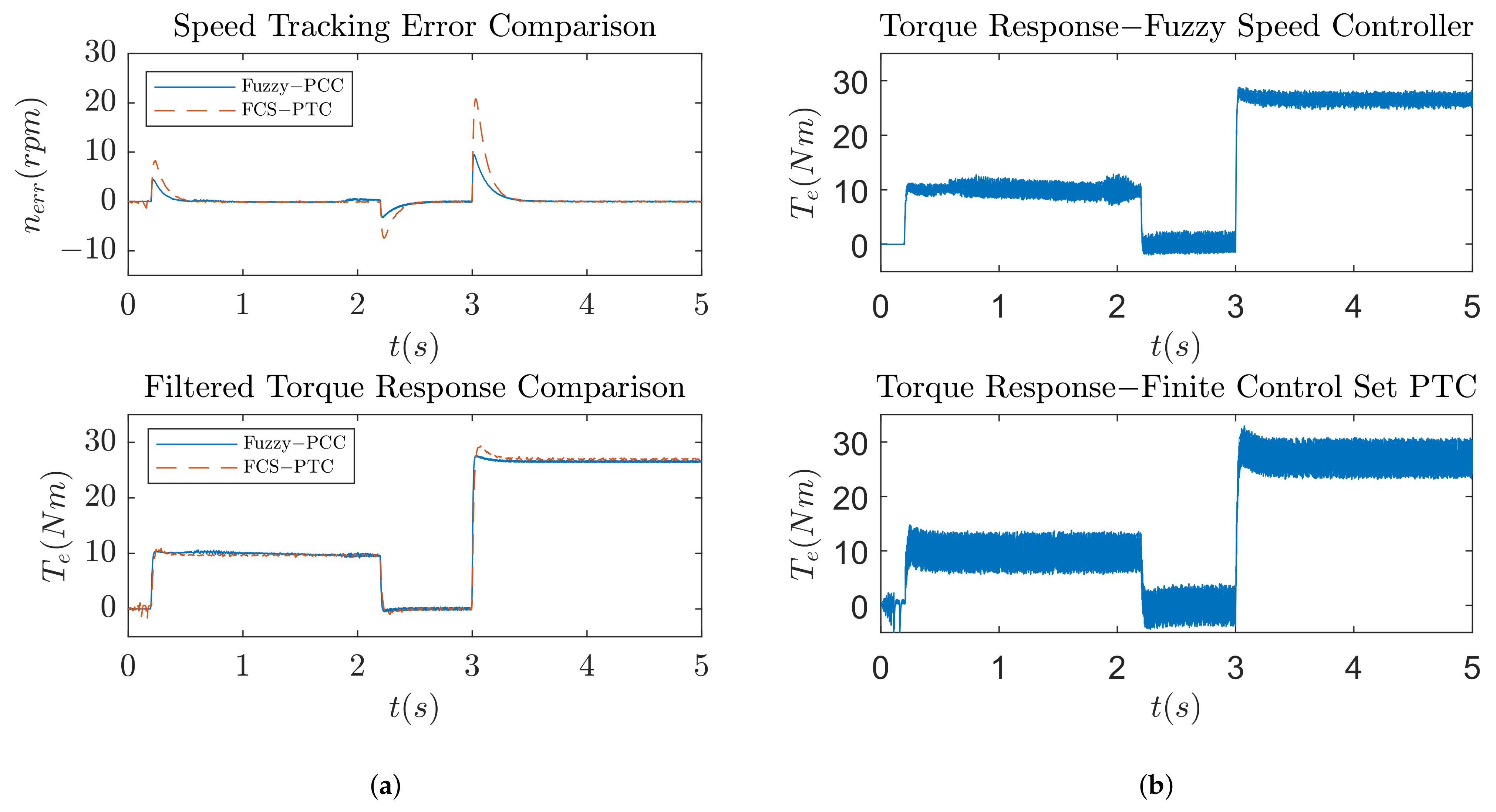
6. Control System Performance
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FLC | Fuzzy Logic Controller |
| PCC | Predictive Current Control |
| FOC | Field-Oriented Control |
| DTC | Direct Torque Control |
| DFIG | Doubly Fed Induction Generator |
| FCS-PCC | Finite Control Set-Predictive Current Control |
| FCS-PTC | Finite Control Set-Predictive Torque Control |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Stator resistance | () | 1.1507 |
| Rotor resistance | () | 1.0107 |
| Stator inductance | () | 0.1315 |
| Rotor inductance | () | 0.1315 |
| Mutual inductance | () | 0.126 |
| Pole pairs | p | 2 |
| Inertia | J () | 0.129 |
| Simulation step size | () | |
| Solver | Fixed-step | Runge–Kutta |
References
- Mistry, R.; Finley, W.R.; Hashish, E.; Kreitzer, S. Rotating Machines: The Pros and Cons of Monitoring Devices. IEEE Ind. Appl. Mag. 2018, 24, 44–55. [Google Scholar] [CrossRef]
- Cheerangal, M.J.; Jain, A.K.; Das, A. Control of Rotor Field-Oriented Induction Motor Drive During Input Supply Voltage Sag. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2789–2796. [Google Scholar] [CrossRef]
- Pandit, J.K.; Aware, M.V.; Nemade, R.V.; Levi, E. Direct Torque Control Scheme for a Six-Phase Induction Motor With Reduced Torque Ripple. IEEE Trans. Power Electron. 2017, 32, 7118–7129. [Google Scholar] [CrossRef]
- Khadar, S.; Abu-Rub, H.; Kouzou, A. Sensorless Field-Oriented Control for Open-End Winding Five-Phase Induction Motor With Parameters Estimation. IEEE Open J. Ind. Electron. Soc. 2021, 2, 266–279. [Google Scholar] [CrossRef]
- Dan, H.; Zeng, P.; Xiong, W.; Wen, M.; Su, M.; Rivera, M. Model predictive control-based direct torque control for matrix converter-fed induction motor with reduced torque ripple. CES Trans. Electr. Mach. Syst. 2021, 5, 90–99. [Google Scholar] [CrossRef]
- Zhao, S.; Blaabjerg, F.; Wang, H. An Overview of Artificial Intelligence Applications for Power Electronics. IEEE Trans. Power Electron. 2021, 36, 4633–4658. [Google Scholar] [CrossRef]
- Tarbosh, Q.A.; Aydogdu, O.; Farah, N.; Talib, M.H.N.; Salh, A.; Cankaya, N.; Omar, F.A.; Durdu, A. Review and Investigation of Simplified Rules Fuzzy Logic Speed Controller of High Performance Induction Motor Drives. IEEE Access 2020, 8, 49377–49394. [Google Scholar] [CrossRef]
- Berzoy, A.; Rengifo, J.; Mohammed, O. Fuzzy Predictive DTC of Induction Machines With Reduced Torque Ripple and High-Performance Operation. IEEE Trans. Power Electron. 2018, 33, 2580–2587. [Google Scholar] [CrossRef]
- Zaky, M.S.; Metwaly, M.K. A Performance Investigation of a Four-Switch Three-Phase Inverter-Fed IM Drives at Low Speeds Using Fuzzy Logic and PI Controllers. IEEE Trans. Power Electron. 2017, 32, 3741–3753. [Google Scholar] [CrossRef]
- Farah, N.; Talib, M.H.N.; Ibrahim, Z.; Abdullah, Q.; Aydogdu, O.; Azri, M.; Lazi, J.B.M.; Isa, Z.M. Investigation of the Computational Burden Effects of Self-Tuning Fuzzy Logic Speed Controller of Induction Motor Drives With Different Rules Sizes. IEEE Access 2021, 9, 155443–155456. [Google Scholar] [CrossRef]
- Naik, N.V.; Singh, S.P. A Novel Interval Type-2 Fuzzy-Based Direct Torque Control of Induction Motor Drive Using Five-Level Diode-Clamped Inverter. IEEE Trans. Ind. Electron. 2021, 68, 149–159. [Google Scholar] [CrossRef]
- Naik, N.V.; Panda, A.; Singh, S.P. A Three-Level Fuzzy-2 DTC of Induction Motor Drive Using SVPWM. IEEE Trans. Ind. Electron. 2016, 63, 1467–1479. [Google Scholar] [CrossRef]
- Sudheer, H.; Kodad, S.F.; Sarvesh, B. Improved Fuzzy Logic based DTC of Induction machine for wide range of speed control using AI based controllers. J. Electr. Syst. 2016, 12, 301–314. [Google Scholar]
- Aymen, F.; Mohamed, N.; Chayma, S.; Reddy, C.H.R.; Alharthi, M.M.; Ghoneim, S.S.M. An Improved Direct Torque Control Topology of a Double Stator Machine Using the Fuzzy Logic Controller. IEEE Access 2021, 9, 126400–126413. [Google Scholar] [CrossRef]
- Farah, N.; Talib, M.H.N.; Mohd Shah, N.S.; Abdullah, Q.; Ibrahim, Z.; Lazi, J.B.M.; Jidin, A. A Novel Self-Tuning Fuzzy Logic Controller Based Induction Motor Drive System: An Experimental Approach. IEEE Access 2019, 7, 68172–68184. [Google Scholar] [CrossRef]
- Tir, Z.; Soufi, Y.; Hashemnia, M.N.; Malik, O.P.; Marouani, K. Fuzzy logic field oriented control of double star induction motor drive. Electr. Eng. 2017, 99, 495–503. [Google Scholar] [CrossRef]
- Tir, Z.; Malik, O.P.; Eltamaly, A.M. Fuzzy logic based speed control of indirect field oriented controlled Double Star Induction Motors connected in parallel to a single six-phase inverter supply. Electr. Power Syst. Res. 2016, 134, 126–133. [Google Scholar] [CrossRef]
- Bessaad, T.; Taleb, R.; Chabni, F.; Iqbal, A. Fuzzy adaptive control of a multimachine system with single inverter supply. Int. Trans. Electr. Energy Syst. 2019, 29, e12070. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ali, J.A.; Mohamed, A.; Amirulddin, U.A.U.; Tan, N.M.L.; Uddin, M.N. Quantum-Behaved Lightning Search Algorithm to Improve Indirect Field-Oriented Fuzzy-PI Control for IM Drive. IEEE Trans. Ind. Appl. 2018, 54, 3793–3805. [Google Scholar] [CrossRef]
- De Almeida Souza, D.; de Aragao Filho, W.; Sousa, G. Adaptive Fuzzy Controller for Efficiency Optimization of Induction Motors. IEEE Trans. Ind. Electron. 2007, 54, 2157–2164. [Google Scholar] [CrossRef]
- Basic, M.; Vukadinovic, D. Online Efficiency Optimization of a Vector Controlled Self-Excited Induction Generator. IEEE Trans. Energy Convers. 2016, 31, 373–380. [Google Scholar] [CrossRef]
- Mayadevi, N.; Mini, V.P.; Kumar, R.H.; Prins, S. Fuzzy-Based Intelligent Algorithm for Diagnosis of Drive Faults in Induction Motor Drive System. Arab. J. Sci. Eng. 2019, 45, 1385–1395. [Google Scholar] [CrossRef]
- Berkani, A. Fuzzy Direct Torque Control for Induction Motor Sensorless Drive Powered by Five Level Inverter with Reduction Rule Base. Prz. Elektrotechniczny 2019, 1, 68–73. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodriguez, J.R.; Kouro, S.; Villarroel, F. Multiobjective Fuzzy-Decision-Making Predictive Torque Control for an Induction Motor Drive. IEEE Trans. Power Electron. 2017, 32, 6245–6260. [Google Scholar] [CrossRef]
- Ammar, A. Performance improvement of direct torque control for induction motor drive via fuzzy logic-feedback linearization. COMPEL—Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 672–692. [Google Scholar] [CrossRef]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N.; Gaeid, K.S. Adaptive Fuzzy Sliding-Mode Control Into Chattering-Free IM Drive. IEEE Trans. Ind. Appl. 2015, 51, 692–701. [Google Scholar] [CrossRef]
- Volosencu, C. Reducing Energy Consumption and Increasing the Performances of AC Motor Drives Using Fuzzy PI Speed Controllers. Energies 2021, 14, 2083. [Google Scholar] [CrossRef]
- Youb, L.; Belkacem, S.; Naceri, F.; Cernat, M.; Pesquer, L.G. Design of an Adaptive Fuzzy Control System for Dual Star Induction Motor Drives. Adv. Electr. Comput. Eng. 2018, 18, 37–44. [Google Scholar] [CrossRef]
- Bahloul, M.; Chrifi-Alaoui, L.; Drid, S.; Souissi, M.; Chabaane, M. Robust sensorless vector control of an induction machine using Multiobjective Adaptive Fuzzy Luenberger Observer. ISA Trans. 2018, 74, 144–154. [Google Scholar] [CrossRef] [PubMed]
- Jabbour, N.; Mademlis, C. Online Parameters Estimation and Autotuning of a Discrete-Time Model Predictive Speed Controller for Induction Motor Drives. IEEE Trans. Power Electron. 2019, 34, 1548–1559. [Google Scholar] [CrossRef]
- Ramesh, T.; Panda, A.K.; Kumar, S.S. Type-2 fuzzy logic control based MRAS speed estimator for speed sensorless direct torque and flux control of an induction motor drive. ISA Trans. 2015, 57, 262–275. [Google Scholar] [CrossRef]
- Boulghasoul, Z.; Kandoussi, Z.; Elbacha, A.; Tajer, A. Fuzzy Improvement on Luenberger Observer Based Induction Motor Parameters Estimation for High Performances Sensorless Drive. J. Electr. Eng. Technol. 2020, 15, 2179–2197. [Google Scholar] [CrossRef]
- Bim, E. Fuzzy optimization for rotor constant identification of an indirect FOC induction motor drive. IEEE Trans. Ind. Electron. 2001, 48, 1293–1295. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Adaptive speed estimation with fuzzy logic control for PV-grid interactive induction motor drive-based water pumping. IET Power Electron. 2019, 12, 1554–1562. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, D.M.; Ngo, Q.V. The Power-Sharing System of DFIG-Based Shaft Generator Connected to a Grid of the Ship. IEEE Access 2021, 9, 109785–109792. [Google Scholar] [CrossRef]
- El Ouanjli, N.; Motahhir, S.; Derouich, A.; El Ghzizal, A.; Chebabhi, A.; Taoussi, M. Improved DTC strategy of doubly fed induction motor using fuzzy logic controller. Energy Rep. 2019, 5, 271–279. [Google Scholar] [CrossRef]
- Ashouri-Zadeh, A.; Toulabi, M.; Bahrami, S.; Ranjbar, A.M. Modification of DFIG’s Active Power Control Loop for Speed Control Enhancement and Inertial Frequency Response. IEEE Trans. Sustain. Energy 2017, 8, 1772–1782. [Google Scholar] [CrossRef]
- Dewangan, S.; Dyanamina, G.; Kumar, N. Performance improvement of wind-driven self-excited induction generator using fuzzy logic controller. Int. Trans. Electr. Energy Syst. 2019, 29, e12039. [Google Scholar] [CrossRef]
- Pantea, A.; Bouyahia, O.; Abdallah, A.; Yazidi, A.; Betin, F. Fault Tolerant Fuzzy Logic Control of a 6-Phase Induction Generator for Wind Turbine Energy Production. Electr. Power Components Syst. 2021, 49, 756–766. [Google Scholar] [CrossRef]
- George, M.A.; Kamat, D.V.; Kurian, C.P. Electronically Tunable ACO Based Fuzzy FOPID Controller for Effective Speed Control of Electric Vehicle. IEEE Access 2021, 9, 73392–73412. [Google Scholar] [CrossRef]
- Chen, G.; Li, Z.; Zhang, Z.; Li, S. An Improved ACO Algorithm Optimized Fuzzy PID Controller for Load Frequency Control in Multi Area Interconnected Power Systems. IEEE Access 2020, 8, 6429–6447. [Google Scholar] [CrossRef]
- Abd Ali, J.; Hannan, M.A.; Mohamed, A.; Abdolrasol, M.G.M. Fuzzy logic speed controller optimization approach for induction motor drive using backtracking search algorithm. Measurement 2016, 78, 49–62. [Google Scholar] [CrossRef]
- Krause, P. Analysis of Electric Machinery and Drive Systems; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Englert, T.; Graichen, K. Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control. Eng. Pract. 2020, 99, 104415. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F. Robust sensorless FCS-PCC control for inverter-based induction machine systems with high-order disturbance compensation. J. Power Electron. 2020, 20, 1222–1231. [Google Scholar] [CrossRef]
- Wang, F.; Xie, H.; Chen, Q.; Davari, S.A.; Rodriguez, J.; Kennel, R. Parallel Predictive Torque Control for Induction Machines Without Weighting Factors. IEEE Trans. Power Electron. 2020, 35, 1779–1788. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Koh, B.K.; Lee, Y.I. Continuous Control Set-Model Predictive Control for Torque Control of Induction Motors in a Wide Speed Range. Electr. Power Components Syst. 2018, 46, 2142–2158. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef] [Green Version]
- Garcia, C.; Rodriguez, J.; Silva, C.; Rojas, C.; Zanchetta, P.; Abu-Rub, H. Full Predictive Cascaded Speed and Current Control of an Induction Machine. IEEE Trans. Energy Convers. 2016, 31, 1059–1067. [Google Scholar] [CrossRef]





| Parameter | Value () | Value () |
|---|---|---|
| , | 0 | 1 |
| , , | 0 | 100 |
| , | 0.000001 | 10,000 |
| 0 | 10,000 | |
| 0 | 100,000 |
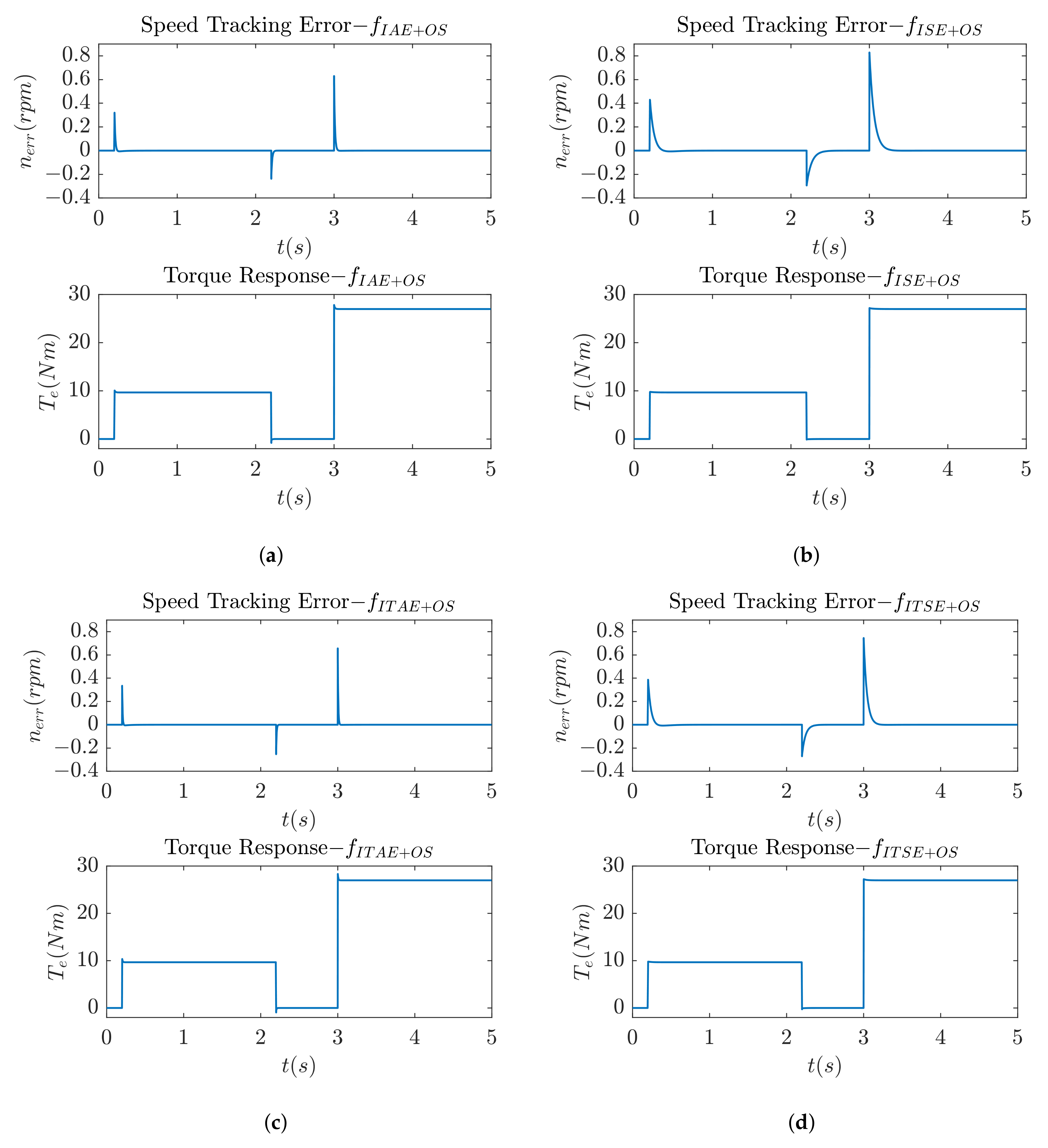
| Optimization Procedure | Objective Function | Max Torque Overshoot (Nm) | Max Speed Tracking Error (rpm) |
|---|---|---|---|
| 1 | 24.34 | 0.25 | |
| 2 | 23.80 | 0.26 | |
| 3 | 21.28 | 0.28 | |
| 4 | 22.23 | 0.26 | |
| 5 (multi-objective) | 2.28 | 0.40 | |
| 6 | 0.84 | 0.63 | |
| 7 | 0.20 | 0.83 | |
| 8 | 1.34 | 0.66 | |
| 9 | 0.24 | 0.75 |
| Parameter | Value |
|---|---|
| 6049.6 | |
| 3212.6 | |
| 6076.7 | |
| 98,680.5 | |
| 77.5 | |
| 51.66 | |
| 94.78 |
| Fuzzy-PCC | PI-PCC | FCS-PCC | FCS-PTC | |
|---|---|---|---|---|
| Max. speed tracking error (rpm) | 9.48 | 21.68 | 21.05 | 20.88 |
| Max. torque overshoot (Nm) | 0.63 | 2.16 | 2.72 | 2.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varga, T.; Benšić, T.; Barukčić, M.; Štil, V.J. Optimization of Fuzzy Controller for Predictive Current Control of Induction Machine. Electronics 2022, 11, 1553. https://doi.org/10.3390/electronics11101553
Varga T, Benšić T, Barukčić M, Štil VJ. Optimization of Fuzzy Controller for Predictive Current Control of Induction Machine. Electronics. 2022; 11(10):1553. https://doi.org/10.3390/electronics11101553
Chicago/Turabian StyleVarga, Toni, Tin Benšić, Marinko Barukčić, and Vedrana Jerković Štil. 2022. "Optimization of Fuzzy Controller for Predictive Current Control of Induction Machine" Electronics 11, no. 10: 1553. https://doi.org/10.3390/electronics11101553
APA StyleVarga, T., Benšić, T., Barukčić, M., & Štil, V. J. (2022). Optimization of Fuzzy Controller for Predictive Current Control of Induction Machine. Electronics, 11(10), 1553. https://doi.org/10.3390/electronics11101553