
FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines



 , ,
, ,  ,
,  ,
,
Abstract
:1. Introduction
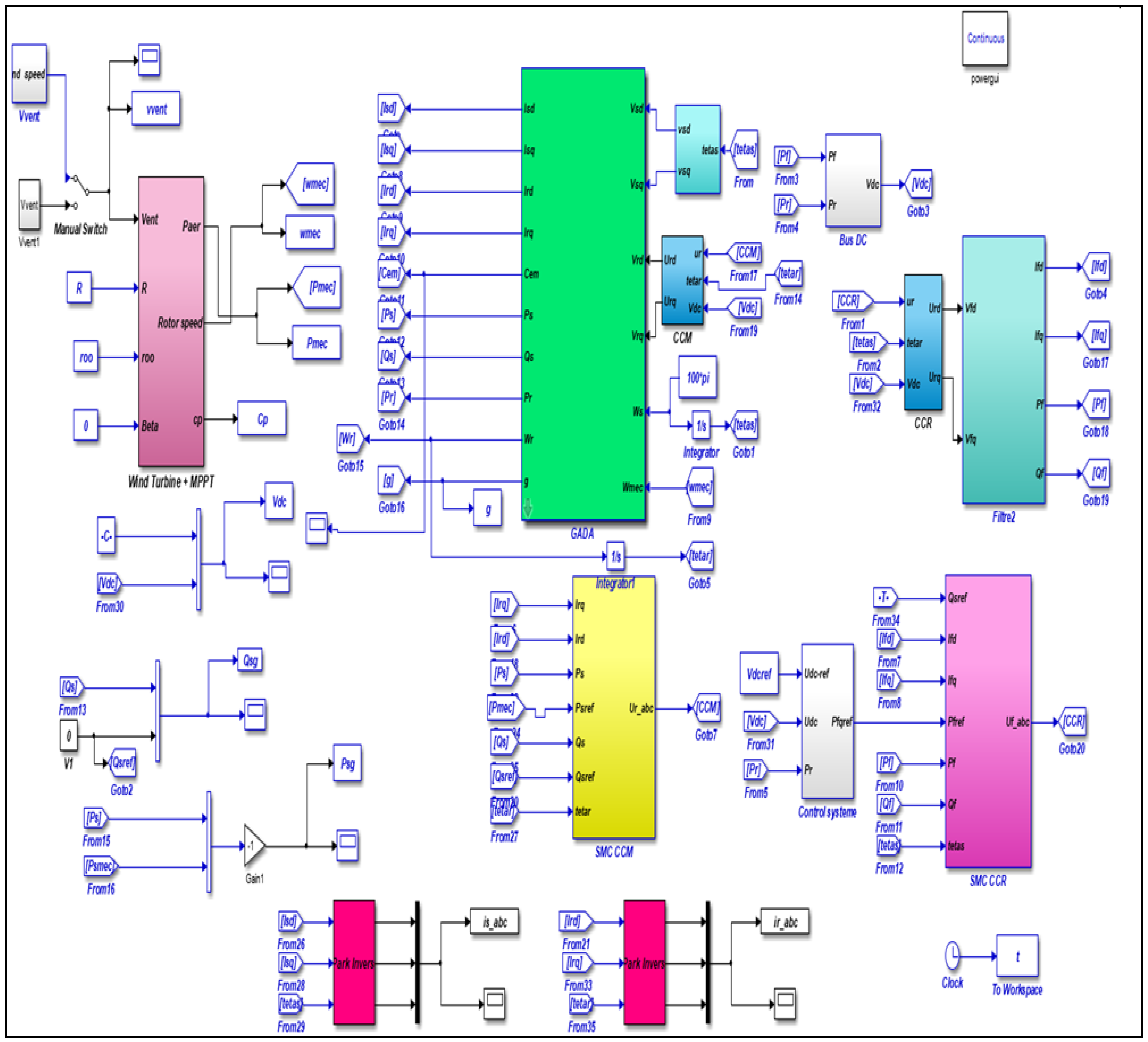
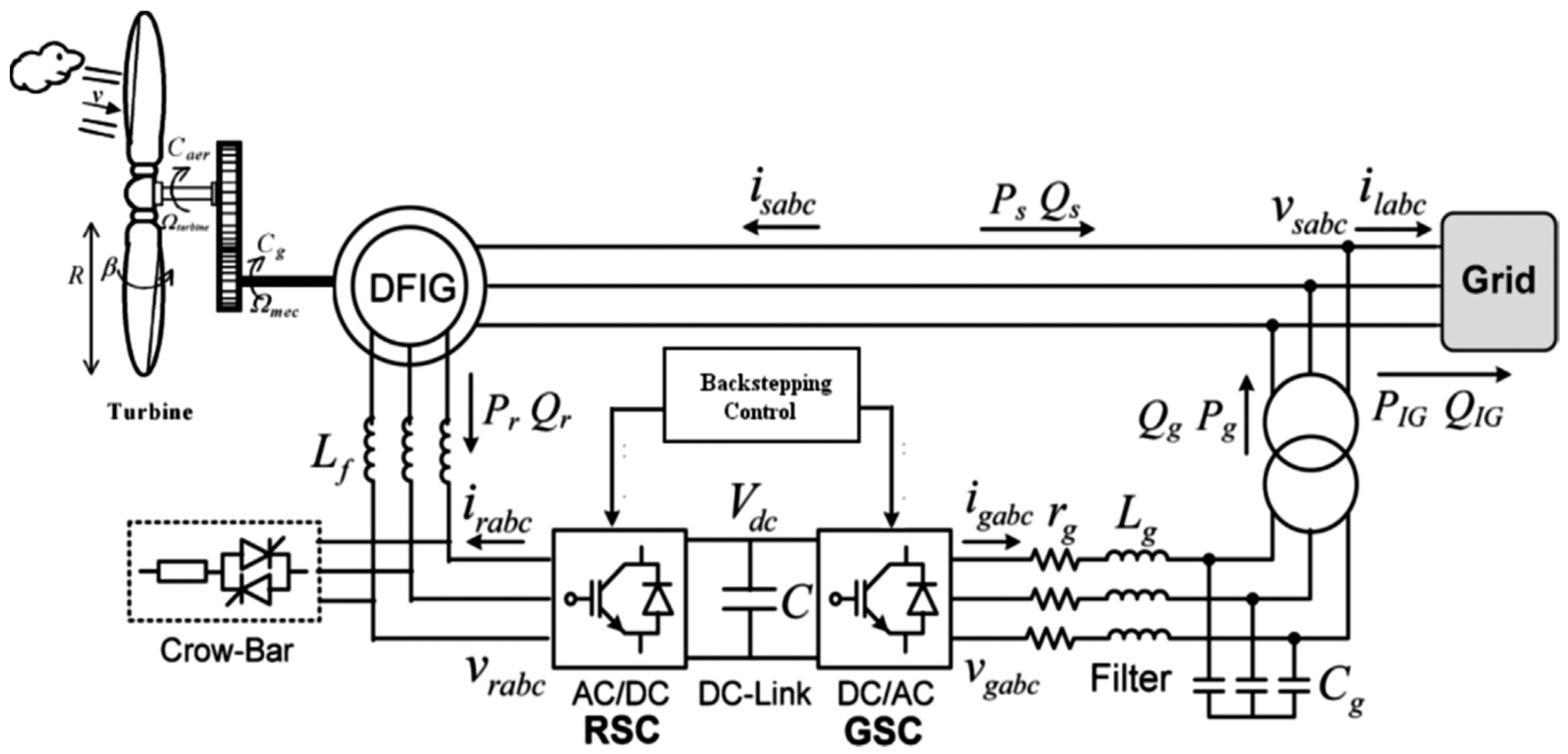
2. Presentation of the Wind Turbine Conversion Chain
- Wind Turbine Model
- Gearbox Model
- The Mechanichal Shaft Models
- DFIG Mode after Park Transformation
- Converters Model
- Filter (RL) Model
3. Sliding Mode Control
- ❖
- The choice of the sliding surface
- ❖
- The establishment of the existence condition
- ❖
- The determination of the control law
3.1. Control of the Converter on the DFIG RSC Side
3.2. Control of the Converter on the GSC Grid Sid
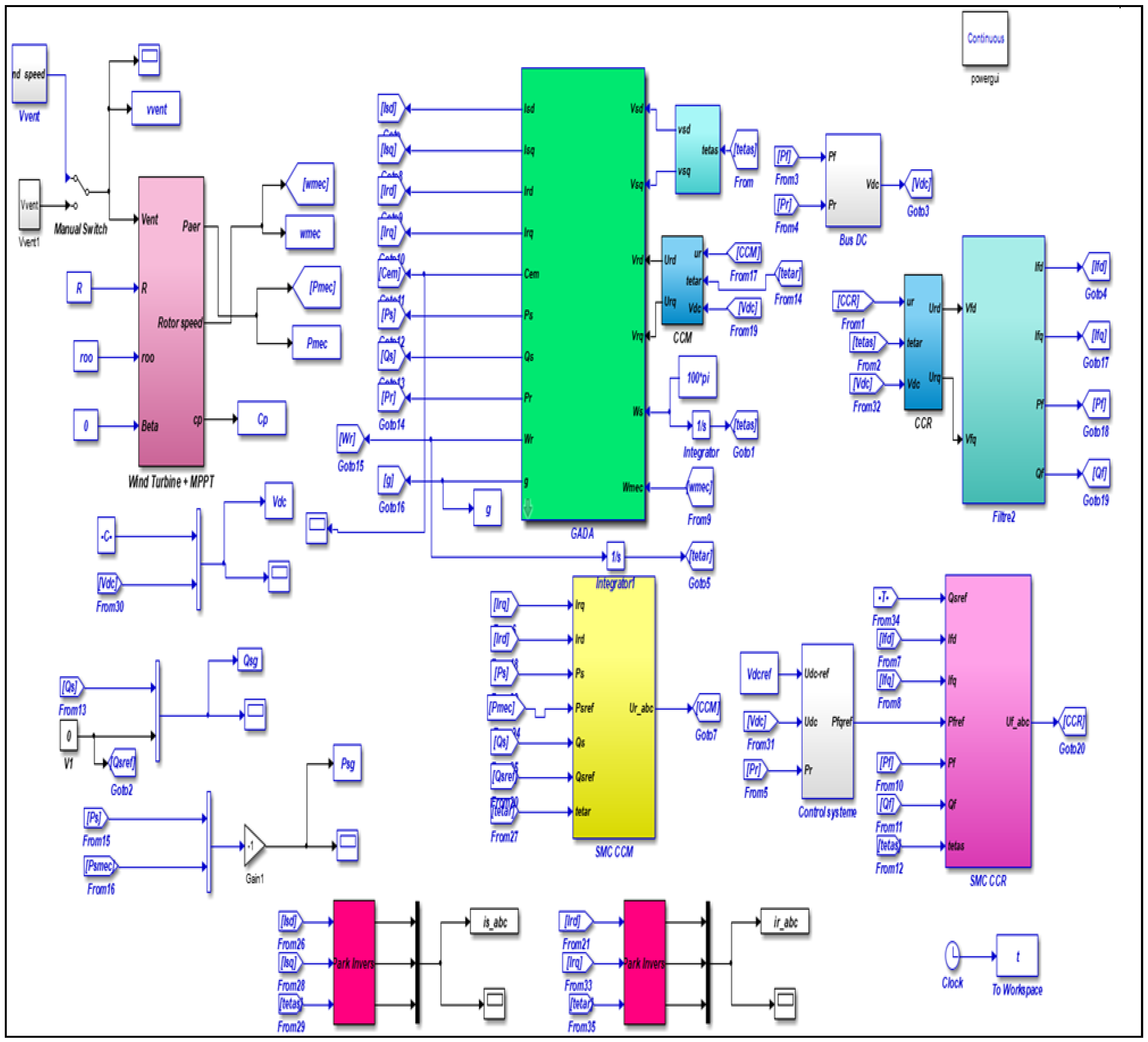
4. Results and Simulation
4.1. Real Wind Profile
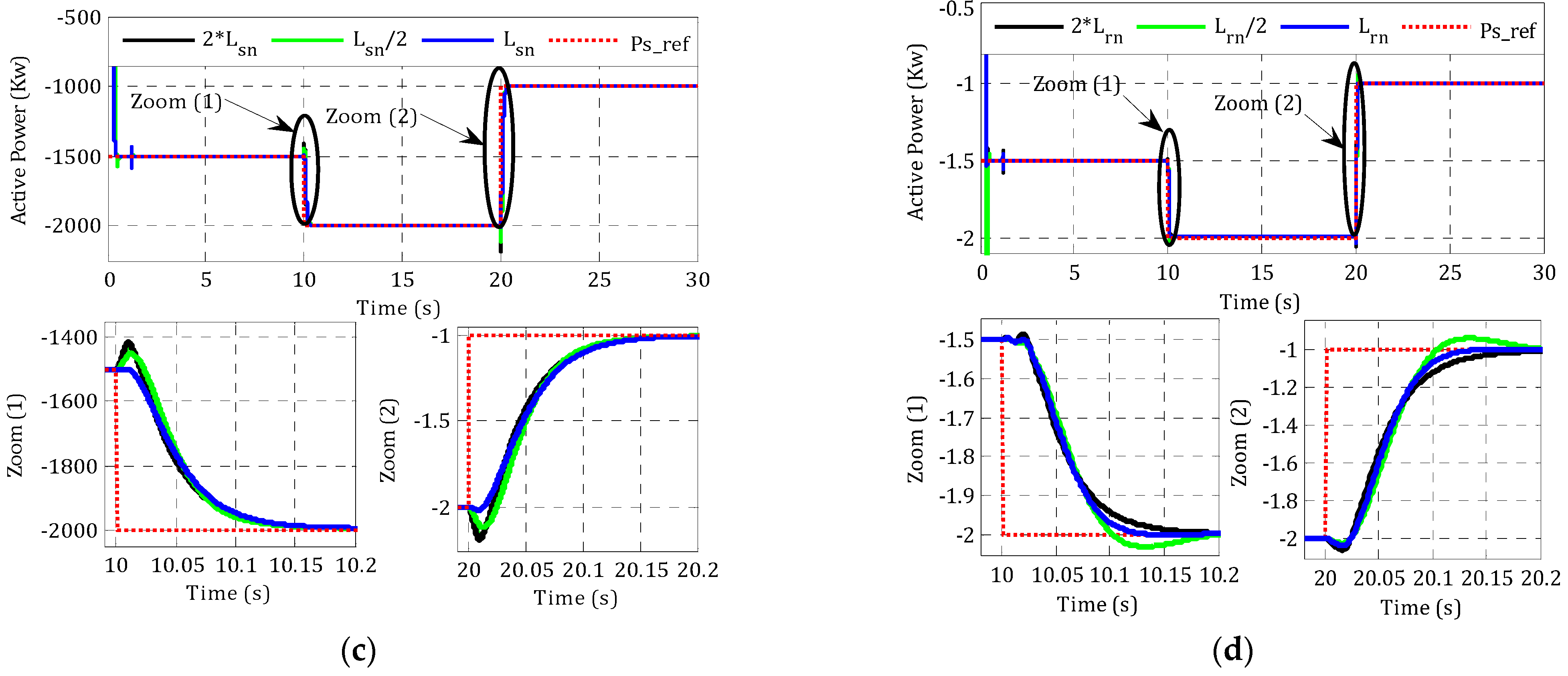
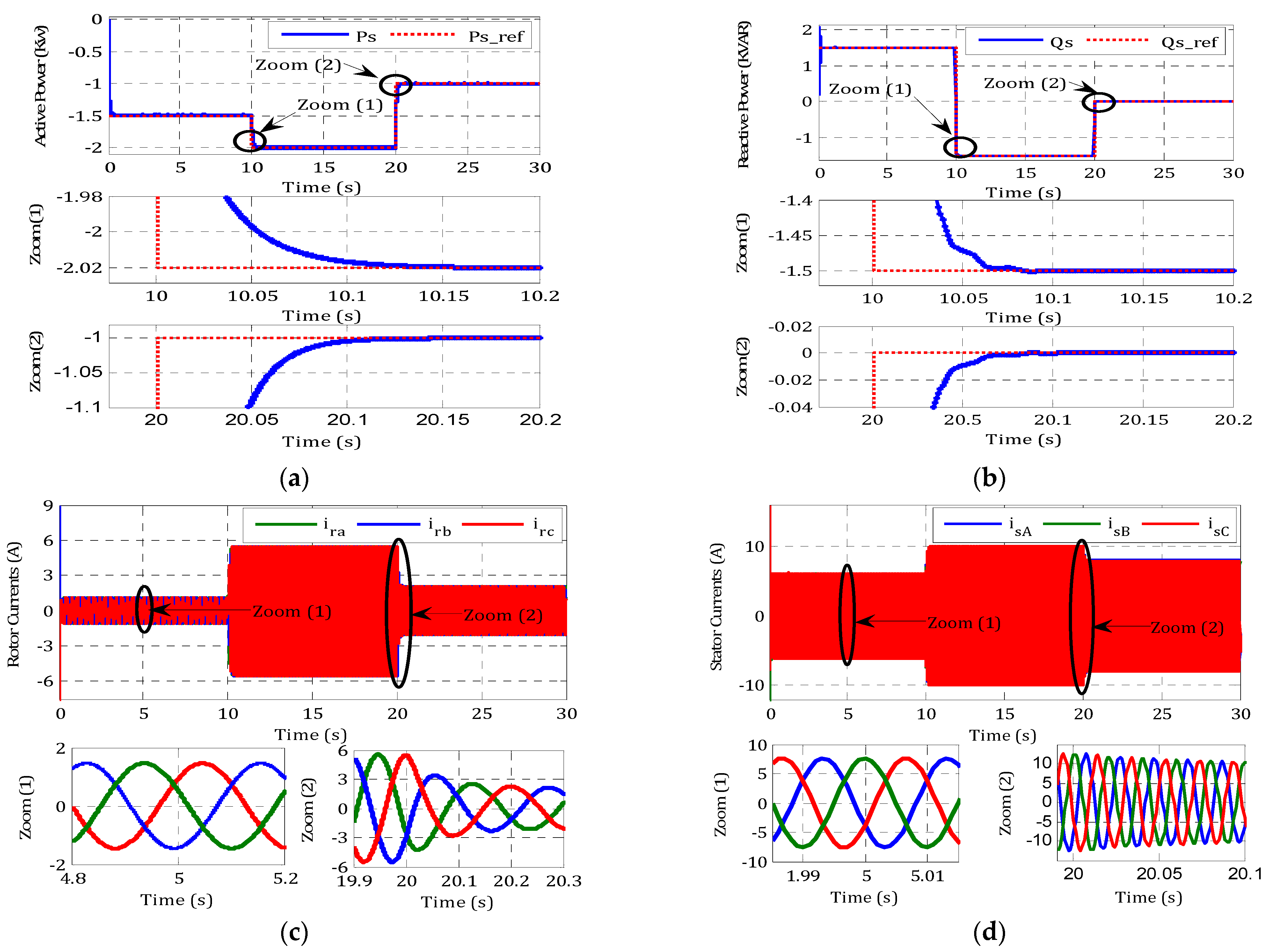
4.2. Step Wind Profile
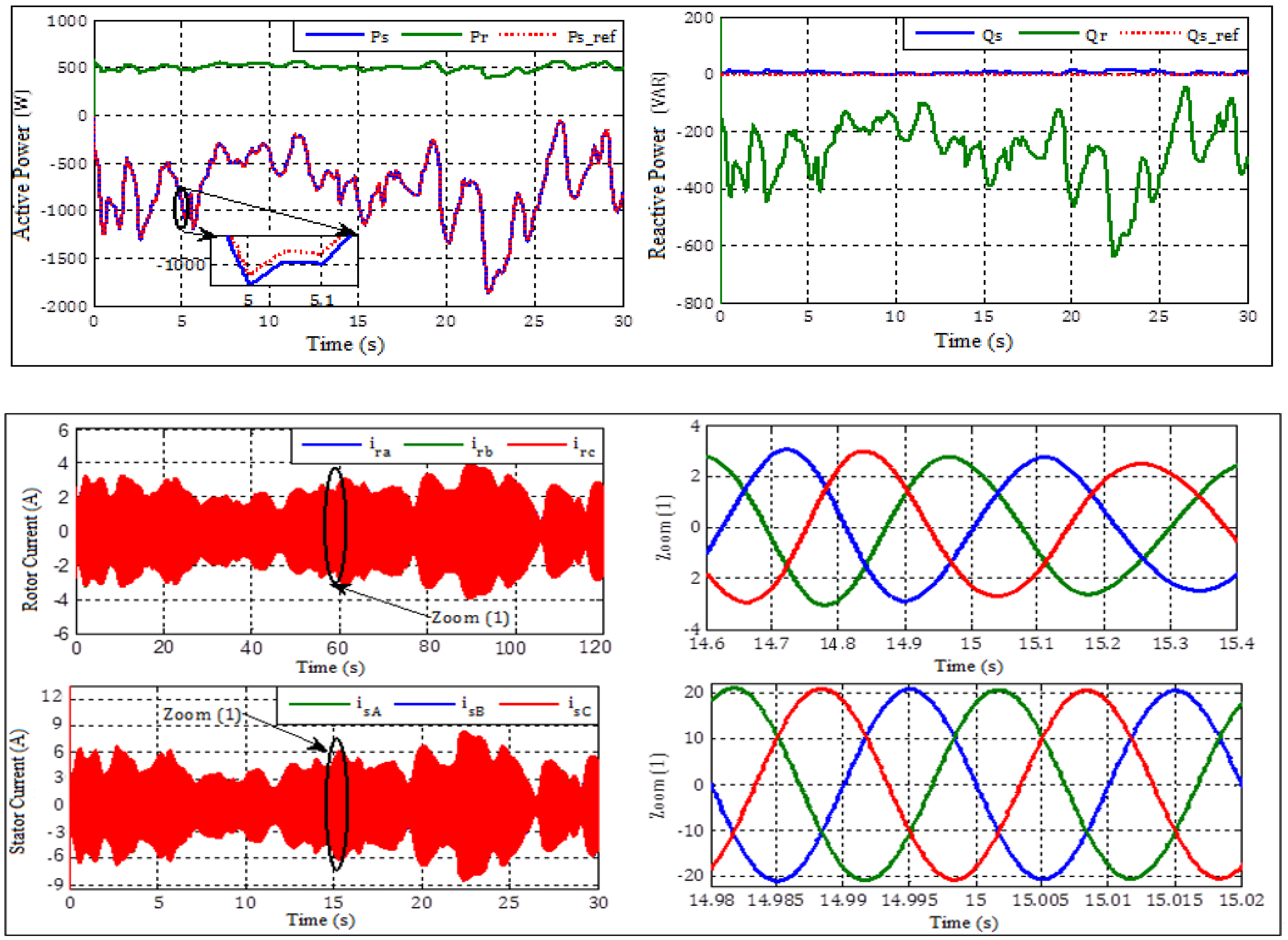
- Better monitoring of active and reactive power.
- Better power factor due to improved reactive power.
- Very good performance monitoring with the references with an error of 0.067%.
- Better responses of the currents Is and Ir despite the variation imposed by the torque.
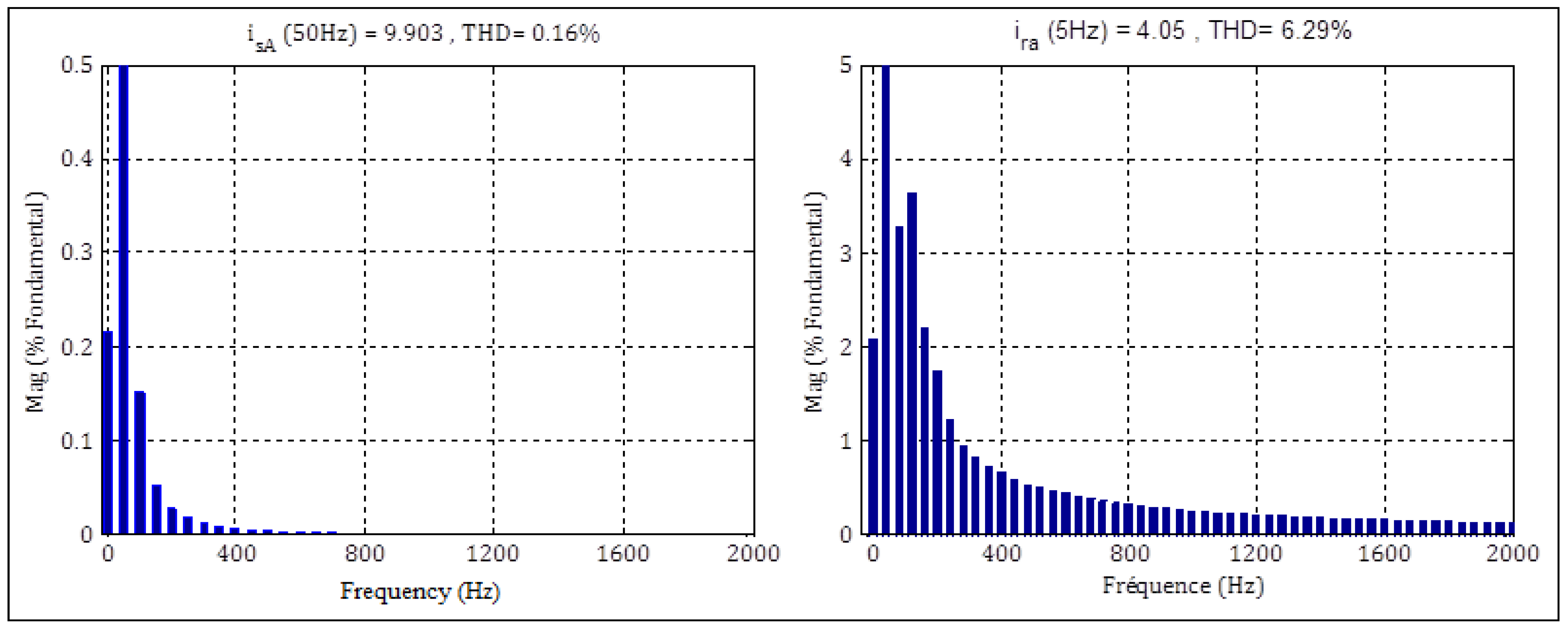
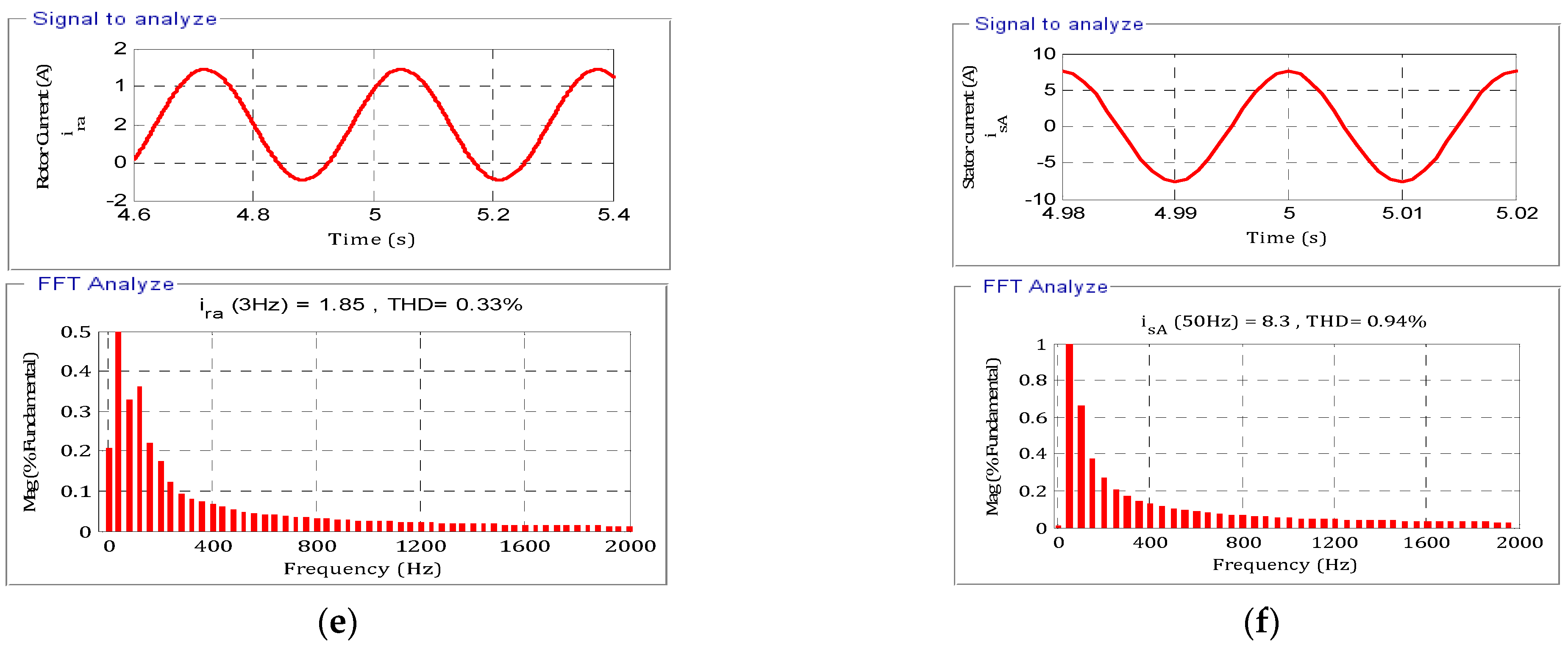
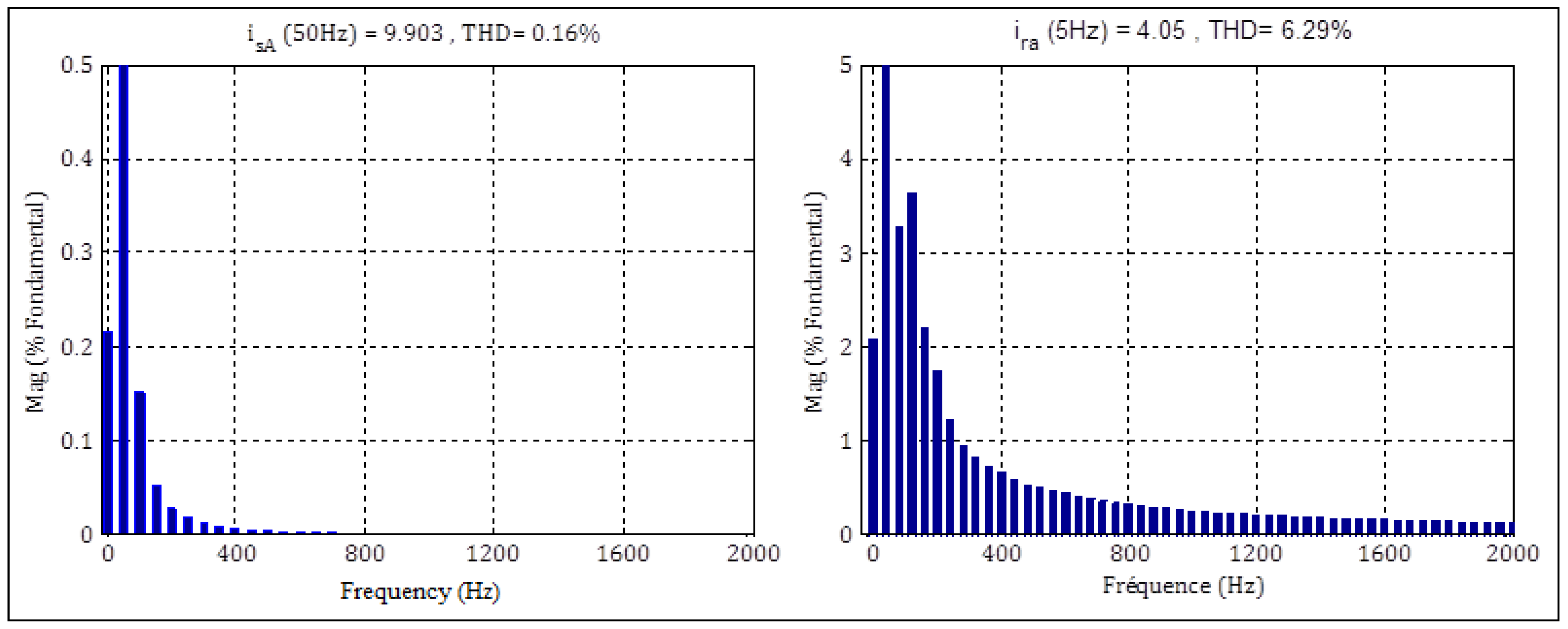
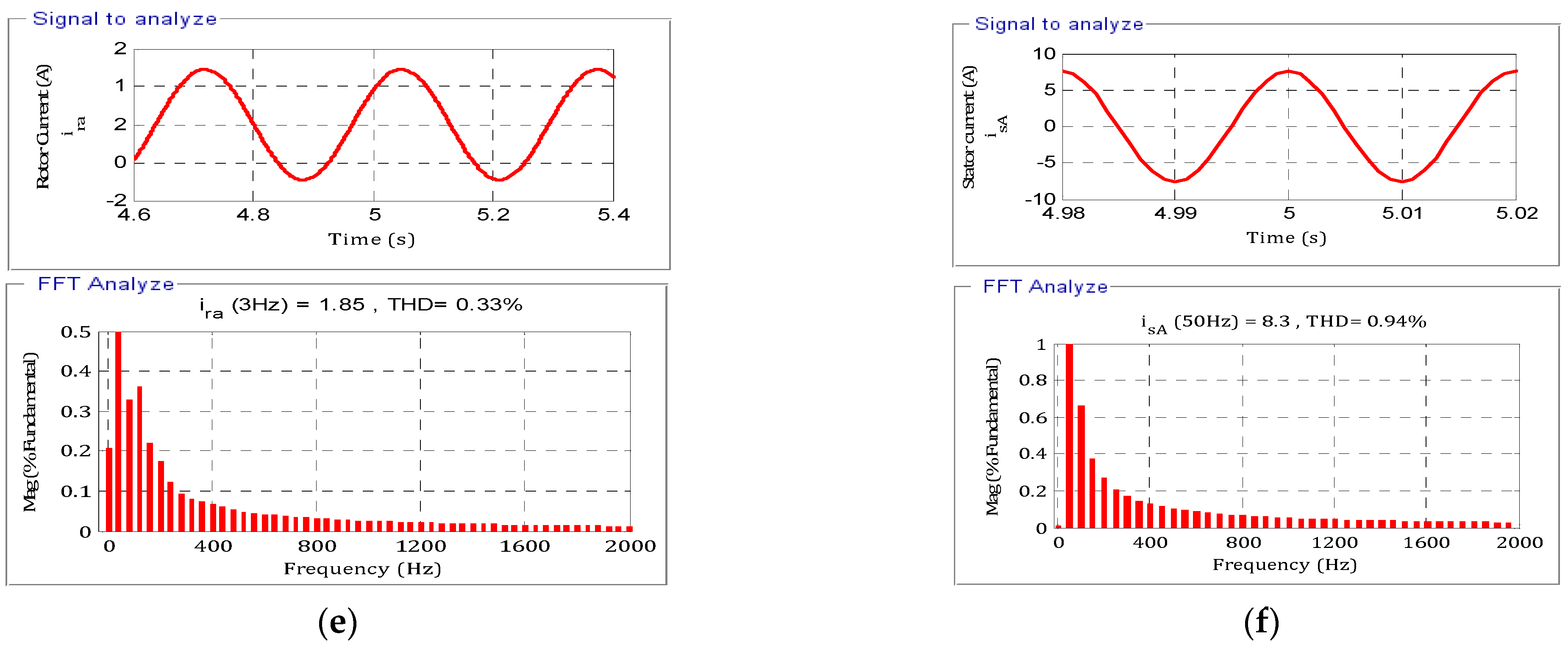
- The form of the current is sinusoidal with a frequency of 50 Hz for the stator current and 3 Hz for the rotor current.
- The THD is 0.33% for the current Ir and is 0.94% for the current Is.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Ωt | turbine speed |
| Rs, Rr | stator/rotor resistances |
| Rf, Lf | resistances and inductance of filter |
| Lr, Ls | stator/rotor inductances |
| Ps | active power at stator |
| Qs, Qf | reactive power to stator and filter |
| Paero | aerodynamic power |
| Cem | electromagnetic torque |
| r, s | rotor and stator flux |
| (vsd, vsq), (isd, isq) | d/q stator voltages and currents |
| (vrd, vrq), (ird, irq) | d/q rotor voltages and currents |
| (vgd, vgq), (igd, igq) | grid voltages and currents |
| (vfd, vfq), (ifd, ifq) | voltages and currents at the RL filter |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DFIG Generator | Wind Turbine | ||||
|---|---|---|---|---|---|
| Parameters | Symbol | Values | Parameters | Symbol | Values |
| Power Generator | Ps | 1.5 KW | Radius of the turbine blade | R | 20 m |
| Stator Resistance | Rs | 4.85 Ω | Specific density of air | ρ | 1.22 kg/m3 |
| Rotor Resistance | Rr | 3.805 Ω | Tip-speed ratio | λopt | 8 |
| Stator Inductance | Ls | 274 mH | Optimal power coefficient | Cp | 0.45 |
| Rotor Inductance | Lr | 258 mH | |||
References
- Rkik, I.; El, M.; Ed-dahhak, A.; Guerbaoui, M.; Lachhab, A. An enhanced control strategy based imaginary swapping instant for induction motor drives. Int. J. Electr. Comput. Engeuring 2022, 12, 1102–1112. [Google Scholar] [CrossRef]
- Alami, H.; Aroussi, E.M.; Ziani, M.; Bouderbala, B.B. Improvement of Direct Torque Control Applied To Doubly Fed Induction Motor Under Variable Speed. IJPEDS Int. J. Power Electron. Drive Syst. 2020, 11, 1511–1520. [Google Scholar]
- Taveiros, F.E.V.; Barros, L.S.; Costa, F.B. Back-to-back converter state-feedback control of DFIG (doubly-fed induction generator)-based wind turbines. Energy 2015, 89, 896–906. [Google Scholar] [CrossRef]
- Hammoumi, D.; El Bekkali, C.; Karim, M.; Taoussi, M.; El Ouanjli, M.; Bossoufi, B. Direct controls for wind turbine with PMSG used on the real wind profile of Essaouira-Morocco city. Indones. J. Electr. Eng. Comput. Sci. 2019, 16, 1229–1239. [Google Scholar] [CrossRef]
- Essallah, S.; Bouallegue, A.; Khedher, A. Integration of automatic voltage regulator and power system stabilizer: Small-signal stability in DFIG-based wind farms. J. Mod. Power Syst. Clean Energy 2019, 7, 1115–1128. [Google Scholar] [CrossRef] [Green Version]
- Bouderbala, M.; Bossoufi, B.; Aroussi, H.A.; Lagrioui, A.; Taoussi, M.; Ihedrane, Y.; El Ghamrasni, M. Modeling and power controls of wind energy conversion systems based on doubly fed induction generator. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Barkia, A.; Bouchiba, N.; Sallem, S.; Chrifi-Alaoui, L.; Drid, S.; Kammoun, M.B.A. A comparative study of PI and Sliding mode controllers for autonomous wind energy conversion system based on DFIG. In Proceedings of the 2016 17th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, STA 2016-Proceedings, Sousse, Tunisia, 9 December 2017; pp. 612–617. [Google Scholar] [CrossRef]
- Drhorhi, I.; El Fadili, A.; Berrahal, C.; Lajouad, R.; El Magri, A.; Giri, F.; Azar, A.T.; Vaidyanathan, S. Adaptive Backstepping Controller for DFIG-Based Wind Energy Conversion System; Elsevier Inc.: Amsterdam, The Netherlands, 2021; ISBN 9780128175828. [Google Scholar]
- Bossoufi, B.; Karim, M.; Taoussi, M.; Aroussi, H.A.; Bouderbala, M.; Motahhir, S.; Camara, M.B. DSPACE-based implementation for observer backstepping power control of DFIG wind turbine. IET Electr. Power Appl. 2020, 14, 2395–2403. [Google Scholar] [CrossRef]
- Giannakis, A.; Karlis, A.; Karnavas, Y.L. A combined control strategy of a DFIG based on a sensorless power control through modified phase-locked loop and fuzzy logic controllers. Renew. Energy 2018, 121, 489–501. [Google Scholar] [CrossRef]
- Ali, M.M.; Youssef, A.R.; Ali, A.S.; Abdel-Jaber, G.T. Comparative study of different pitch angle control strategies for DFIG based on wind energy conversion system. Int. J. Renew. Energy Res. 2019, 9, 157–163. [Google Scholar]
- Yang, X.; Liu, G.; Li, A.; Le, V.D. A predictive power control strategy for DFIGs based on a wind energy converter system. Energies 2017, 10, 1098. [Google Scholar] [CrossRef]
- Yang, X.; Liu, G.; Le, V.D.; Le, C.Q. A novel model-predictive direct control for induction motor drives. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1691–1702. [Google Scholar] [CrossRef]
- Ayyarao, T.S.L.V. Modified vector controlled DFIG wind energy system based on barrier function adaptive sliding mode control. Prot. Control Mod. Power Syst. 2019, 4, 1193. [Google Scholar] [CrossRef] [Green Version]
- Aounallah, T.; Essounbouli, N.; Hamzaoui, A.; Bouchafaa, F. Algorithm on fuzzy adaptive backstepping control of fractional order for doubly-fed induction generators. IET Renew. Power Gener. 2018, 12, 962–967. [Google Scholar] [CrossRef]
- Kelkoul, B.; Boumediene, A. Stability analysis and study between classical sliding mode control (SMC) and super twisting algorithm (STA) for doubly fed induction generator (DFIG) under wind turbine. Energy 2021, 214, 118871. [Google Scholar] [CrossRef]
- Soomro, M.A.; Memon, Z.A.; Kumar, M.; Baloch, M.H. Wind energy integration: Dynamic modeling and control of DFIG based on super twisting fractional order terminal sliding mode controller. Energy Rep. 2021, 7, 6031–6043. [Google Scholar] [CrossRef]
- Chojaa, H. Maximum Power Extraction of Five-Phase Pmsg Based Wecs by Adopting an Improved Fractional Order Sliding Mode Strategy. Energy Rep. 2021, 11, 55–74. [Google Scholar] [CrossRef]
- Le, V.; Li, X.; Li, Y.; Dong, T.L.T.; Le, C. An innovative control strategy to improve the fault ride-through capability of DFIGs based on wind energy conversion systems. Energies 2016, 9, 69. [Google Scholar] [CrossRef]
- Bossoufi, B.; Karim, M.; Taoussi, M.; Aroussi, H.A.; Bouderbala, M.; Deblecker, O.; Motahhir, S.; Nayyar, A.; Alzain, M.A. Rooted tree optimization for the backstepping power control of a doubly fed induction generator wind turbine: Dspace implementation. IEEE Access 2021, 9, 26512–26522. [Google Scholar] [CrossRef]
- Apata, O.; Oyedokun, D.T.O. An overview of control techniques for wind turbine systems. Sci. Afr. 2020, 10, e00566. [Google Scholar] [CrossRef]
- Bouderbala, M.; Bossoufi, B.; Deblecker, O.; Alami Aroussi, H.; Taoussi, M.; Lagrioui, A.; Motahhir, S.; Masud, M.; Alraddady, F.A. Experimental Validation of Predictive Current Control for DFIG: FPGA Implementation. Electronics 2021, 10, 2670. [Google Scholar] [CrossRef]
- Djoudi, A.; Bacha, S.; Iman-Eini, H.; Rekioua, T. Sliding mode control of DFIG powers in the case of unknown flux and rotor currents with reduced switching frequency. Int. J. Electr. Power Energy Syst. 2018, 96, 347–356. [Google Scholar] [CrossRef]
- Liao, K.; He, Z.; Xu, Y.; Chen, G.; Dong, Z.Y.; Wong, K.P. A Sliding Mode Based Damping Control of DFIG for Interarea Power Oscillations. IEEE Trans. Sustain. Energy 2017, 8, 258–267. [Google Scholar] [CrossRef]
- Lhachimi, H.; Sayouti, Y.; El Kouari, Y. Optimal improvement of direct power control strategy based on sliding mode controllers. Comput. Electr. Eng. 2018, 71, 637–656. [Google Scholar] [CrossRef]
- Chakib, M.; Essadki, A.; Nasser, T. A comparative study of PI, RST and ADRC control strategies of a doubly fed induction generator based wind energy conversion system. Int. J. Renew. Energy Res. 2018, 8, 964–973. [Google Scholar]
- Bossoufi, B.; Karim, M.; Lagrioui, A.; Taoussi, M. FPGA-Based Implementation nonlinear backstepping control of a PMSM Drive. IJPEDS Int. J. Power Electron. Drive Syst. 2014, 4, 12–23. [Google Scholar] [CrossRef]
- Bossoufi, B.; Karim, M.; Lagrioui, A.; Taoussi, M. FPGA-Based Implementation Sliding Mode Control and nonlinear Adaptive Backstepping control of a Permanent Magnet Synchronous Machine Drive. Wseas Trans. Syst. Control 2014, 9, 86–100. [Google Scholar]
- Sghaier, N.; Ramzi, T.; Gdaim, S.; Bossoufi, B.; Mimouni, M.F. Backstepping control of induction motor using Xilinx System Generator: FPGA-based implementation. Int. J. Emerg. Sci. 2013, 3, 289–302. [Google Scholar]
- Bossoufi, B.; Karim, M.; Ionita, S.; Lagrioui, A. Nonlinear non Adaptive Backstepping with Sliding-Mode Torque Control Approach for PMSM Motor. J. Electr. Syst. JES 2012, 8, 236–248. [Google Scholar]
- Bossoufi, B.; Karim, M.; Ionita, S.; Lagrioui, A. The Optimal Direct Torque Control of a PMSM drive: FPGA-Based Implementation with Matlab & Simulink Simulation. J. Theor. Appl. Inf. Technol. JATIT 2011, 28, 63–72. [Google Scholar]
- Bossoufi, B.; Karim, M.; Ionita, S.; Lagrioui, A.; Iana, G. Matlab & Simulink Simulation with FPGA-Based Implementation Sliding Mode Control of a Permanent Magnet Synchronous Machine Drive. Wseas Trans. Syst. Control 2011, 6, 92–103. [Google Scholar]
- Bossoufi, B.; Karim, M.; Ionita, S.; Lagrioui, A. Indirect Sliding Mode Control of a Permanent Magnet Synchronous Machine: FPGA-Based Implementation with Matlab & Simulink Simulation. J. Theor. Appl. Inf. Technol. JATIT 2011, 29, 32–42. [Google Scholar]
- El Ouanjli, N.; Derouich, A.; El Ghzizal, A. Direct torque control of doubly fed induction motor using three-level NPC inverter. Prot Control Mod Power Syst 2019, 4, 17. [Google Scholar] [CrossRef] [Green Version]
- Saady, I.; Karim, M.; Bossoufi, B.; Motahhir, S.; Adouairi, M.S.; Majout, B.; Lamnadi, M.; Masud, M.; Al-Amri, J.F. Optimisation for a Photovoltaic Pumping System using Indirect Field Oriented Control of Induction Motor. Electronics 2021, 10, 3076. [Google Scholar] [CrossRef]
- Taoussi, M.; Bossoufi, B.; Bouderbala, M.; Motahhir, S.; Alkhammash, E.H.; Masud, M.; ZineLabidine, N.; Karim, M. Implementation and Validation of Hybrid Control for DFIG Wind Turbine Using FPGA Controller Board. Electronics 2021, 10, 3154. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alami, H.E.; Bossoufi, B.; Motahhir, S.; Alkhammash, E.H.; Masud, M.; Karim, M.; Taoussi, M.; Bouderbala, M.; Lamnadi, M.; El Mahfoud, M. FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines. Electronics 2022, 11, 116. https://doi.org/10.3390/electronics11010116
Alami HE, Bossoufi B, Motahhir S, Alkhammash EH, Masud M, Karim M, Taoussi M, Bouderbala M, Lamnadi M, El Mahfoud M. FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines. Electronics. 2022; 11(1):116. https://doi.org/10.3390/electronics11010116
Chicago/Turabian StyleAlami, Houda El, Badre Bossoufi, Saad Motahhir, Eman H. Alkhammash, Mehedi Masud, Mohammed Karim, Mohammed Taoussi, Manale Bouderbala, Mouna Lamnadi, and Mohammed El Mahfoud. 2022. "FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines" Electronics 11, no. 1: 116. https://doi.org/10.3390/electronics11010116
APA StyleAlami, H. E., Bossoufi, B., Motahhir, S., Alkhammash, E. H., Masud, M., Karim, M., Taoussi, M., Bouderbala, M., Lamnadi, M., & El Mahfoud, M. (2022). FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines. Electronics, 11(1), 116. https://doi.org/10.3390/electronics11010116