
Ubiquitous Vehicular Ad-Hoc Network Computing Using Deep Neural Network with IoT-Based Bat Agents for Traffic Management

 , ,
, ,  , , and
, , and 
Abstract
1. Introduction
- In terms of various collision prevention methods, such as packet delivery rate, latency, failure rate, and real-time traffic throughput, the authors analysed the DNN-Internet of Things (IoT)-BA model with existing deep learning models;
- The authors devised and updated the routing table to reduce vehicle collision rates in real-time based on the traffic information collected by the IoT agents across the network;
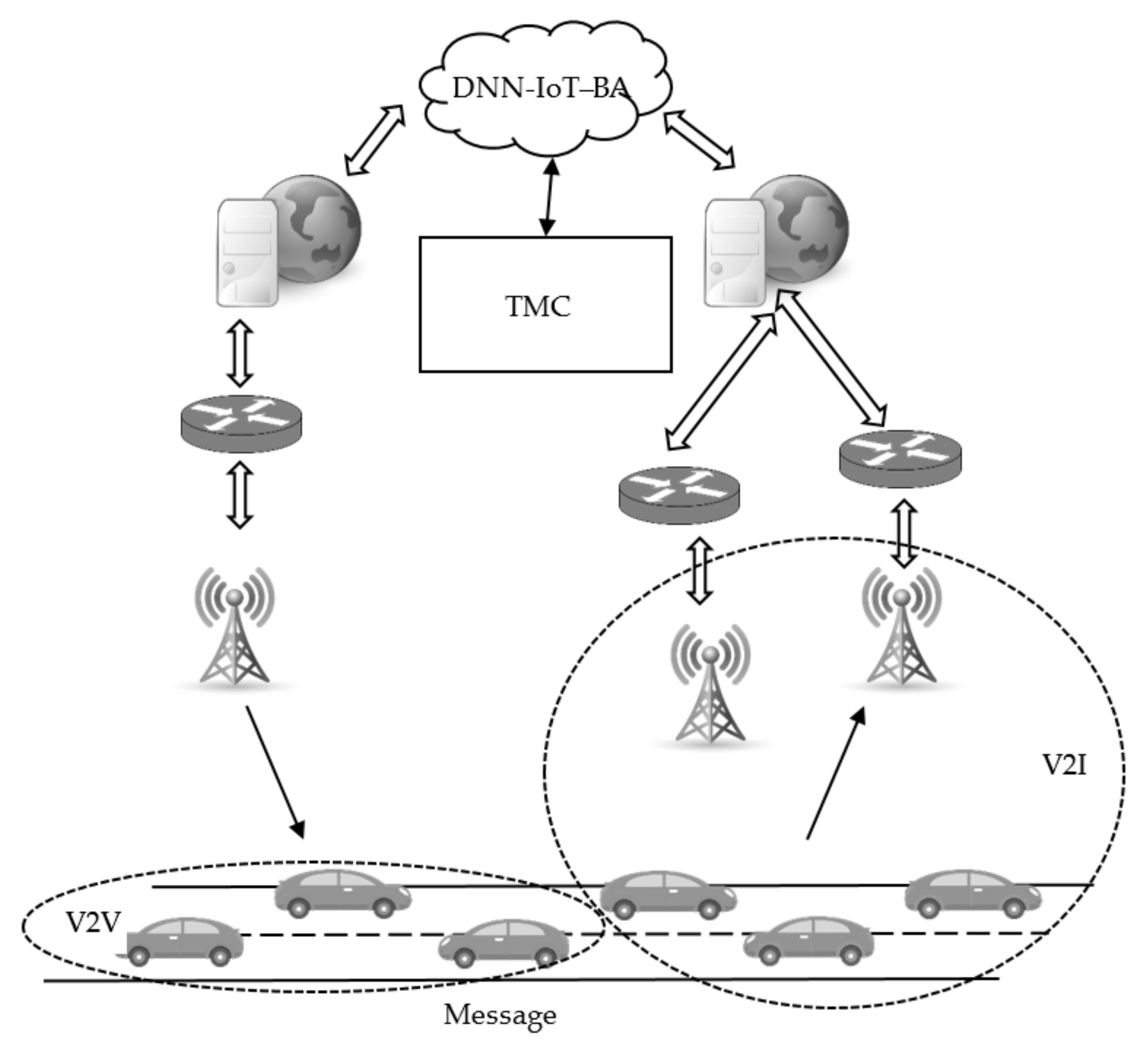
2. Network Model
- Vehicle Unit: VANETs are responsible for communication with nearby vehicles along the highway sector or with the RSUs at the edges/corners in simple terms for transport purposes. VANETs are also responsible for facilitating transport. We used elliptical curve encryption as an encryption algorithm in this paper to generate cryptographic credential information and store it in the vehicle. The Global Positioning System (GPS) is responsible for locating the vehicle inside. In a road segment, RSUs can determine the total number of vehicles using a GPS unit [40,41,42,43,44,73,74,75,76,77];
- Roadside units (RSUs): The RSU is an access point on the roads, where details of vehicle units can be found along the roads. The vehicle units’ encrypted street segments are regarded as the relay for the Transport Message Channel. An IoT-BA is connected to RSU by a faster means of communication. The RSU operates the cryptographic credentials to decode vehicle information and the DNN-IoT-BA algorithm and stores them;
- Traffic Management Center (TMC): The IoT-BA calculates the traffic density using road segments. In order to obtain road traffic information, the directional connection of TMC to RSUs and other IoT-BAs are used. In order to avoid congestion in road segments, the IoT-BA transfers the collected information to the DNN. The differential between TMC and IoT-BA is that the former is a fixed segment and the latter is a network-wide mobile segment.
- Detection range is defined as the communication region between the receiver sensitivity threshold of any two vehicles and the SINR, which are required for payload;
- Data Exchange range is defined as the communication region in which the data transmission takes place;
- Time before handover is defined as the communication region where the OBU prepares for handover;
- Time to handover is defined as the communication region where the actual handover takes place.
- λ is the wavelength;
- max(p) is the maximum level of transmission power;
- α is defined as the minimum level of a path loss coefficient.
- V is the velocity of the VU;
- P is defined as the Perimeter of an RSU;
- A is defined as the area of an RSU.
3. Traffic Management Model
3.1. Mobile Agent Unit
3.2. Infrastructure Unit
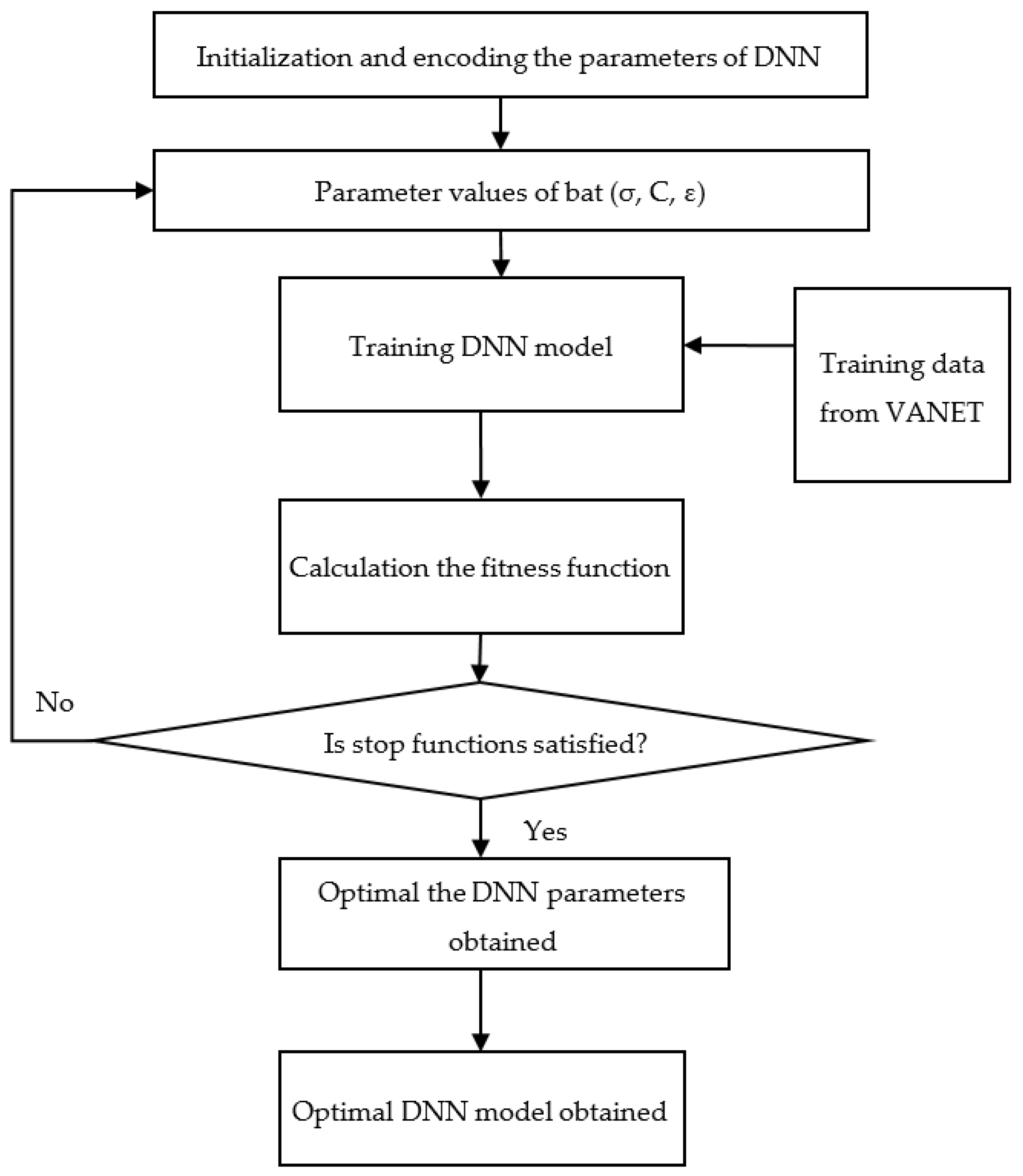
3.3. Bat Algorithm (BA)
- fi is the frequency;
- is the velocity;
- is the position;
- is the loudness;
- is the emission pulse rate;
- 𝑥∗ is the global best;
- Fmin is the minimum frequency;
- fmax is the maximum frequency.
- ε is the arbitrary vector;
- At is the normal commotion at step t.
- rand is considered a random vector with uniform distribution.
- 0 < α < 1 and γ > 0
- ai is the actual value;
- di is the estimated value.
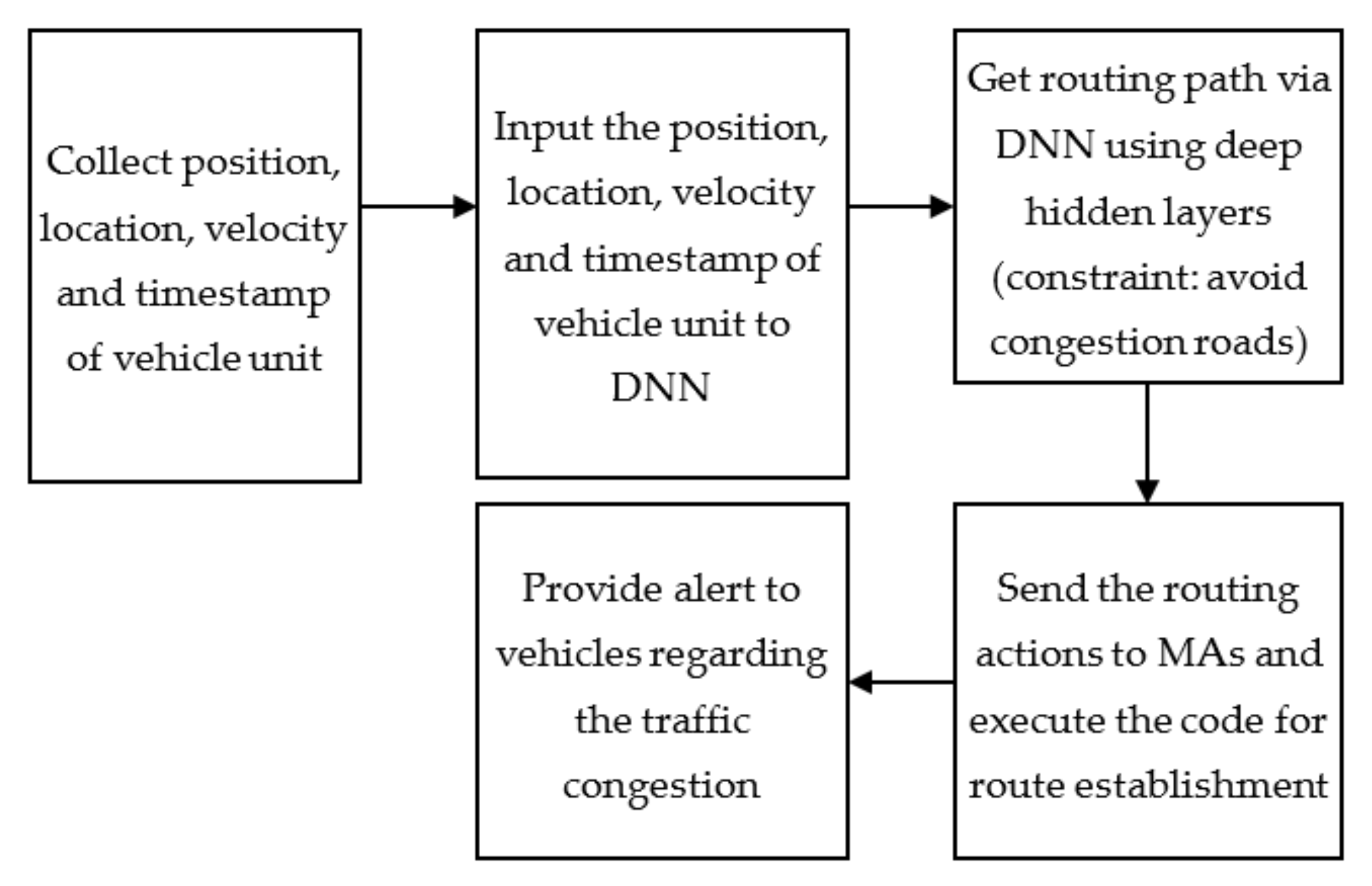
3.4. Infrastructure Unit Workflow
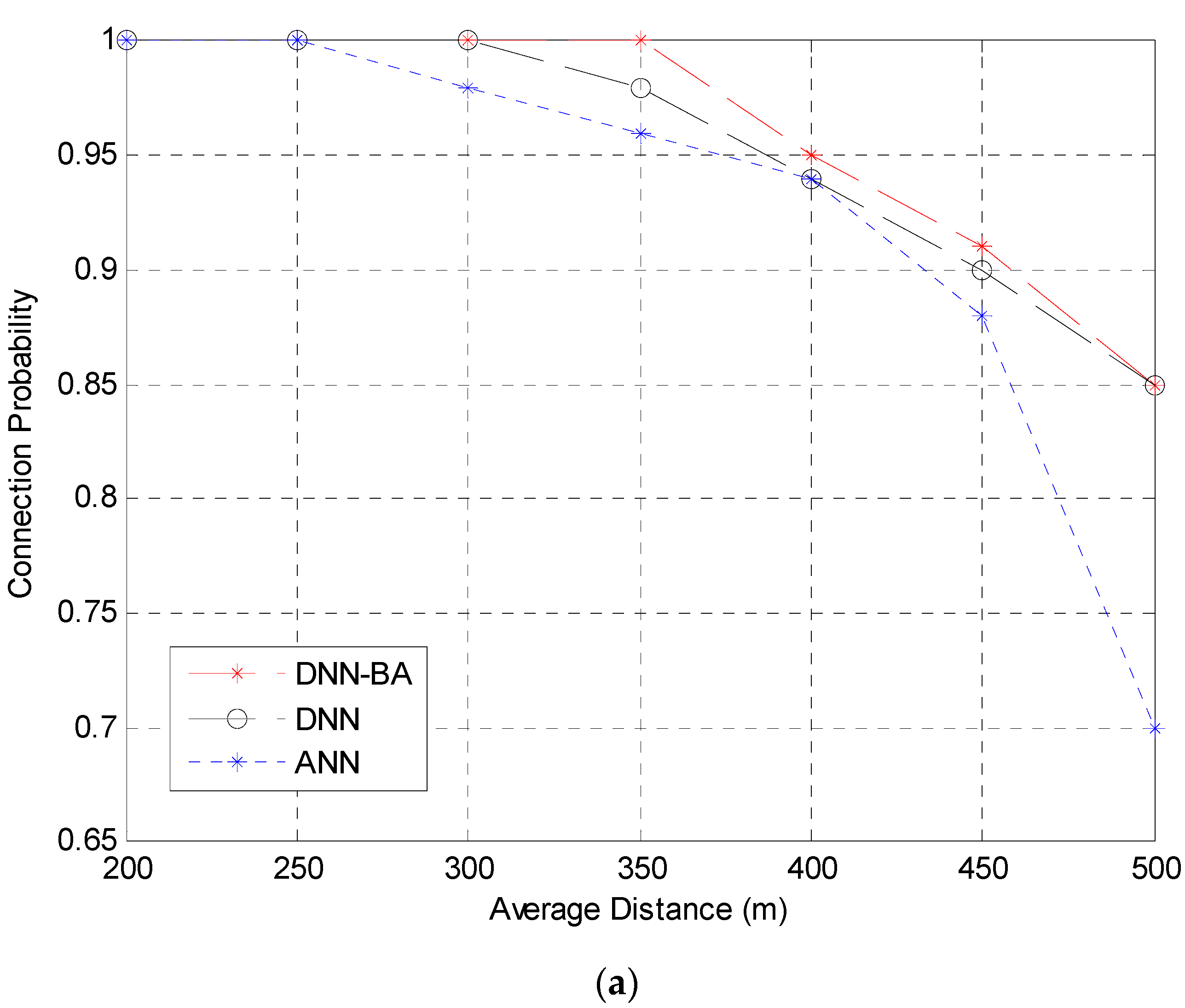
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Delicato, F.C.; Fuentes, L.; Gámez, N.; Pires, P.F. A Middleware Family for VANETs. In International Conference on Ad-Hoc Networks and Wireless; Springer: Berlin/Heidelberg, Germany, 2009; pp. 379–384. [Google Scholar]
- Nair, R.; Gupta, S.; Soni, M.; Shukla, P.K.; Dhiman, G. An approach to minimize the energy consumption during blockchain transaction. Mater. Today Proc. 2020. [Google Scholar] [CrossRef]
- Soni, M.; Barot, Y.; Gomathi, S. A review on Privacy-Preserving Data Preprocessing. J. Cybersecur. Inf. Manag. 2020, 5, 12–26. [Google Scholar]
- Soni, M.; Rajput, B.S.; Patel, T.; Parmar, N. Lightweight Vehicle-to-Infrastructure Message Verification Method for VANET. In Data Science and Intelligent Applications; Kotecha, K., Piuri, V., Shah, H., Patel, R., Eds.; Springer: Singapore, 2021; Volume 52. [Google Scholar] [CrossRef]
- Blot, G.; Fouchal, H.; Rousseaux, F.; Saurel, P. An experimentation of vanets for traffic management. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- Shen, L.; Liu, R.; Yao, Z.; Wu, W.; Yang, H. Development of dynamic platoon dispersion models for predictive traffic signal control. IEEE Trans. Intell. Transp. Syst. 2018, 20, 431–440. [Google Scholar] [CrossRef]
- Srivastava, S.; Sahana, S.K. Application of Bat Algorithm for Transport Network Design Problem. Appl. Comput. Intell. Soft Comput. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Srivastava, S.; Sahana, S.K. Nested hybrid evolutionary model for traffic signal optimization. Appl. Intell. 2016, 46, 113–123. [Google Scholar] [CrossRef]
- Yao, Z.; Jiang, Y.; Zhao, B.; Luo, X.; Peng, B. A dynamic optimization method for adaptive signal control in a connected vehicle environment. J. Intell. Transp. Syst. 2020, 24, 184–200. [Google Scholar] [CrossRef]
- Balta, M.; Özçelik, İ. A 3-stage fuzzy-decision tree model for traffic signal optimization in urban city via a SDN based VANET architecture. Future Gener. Comput. Syst. 2020, 104, 142–158. [Google Scholar] [CrossRef]
- Altiındağ, E.; Baykan, B. Discover the world’s research. Turk J. Neurol. 2017, 23, 88–89. [Google Scholar] [CrossRef]
- Ke, X.; Shi, L.; Guo, W.; Chen, D. Multi-dimensional traffic congestion detection based on fusion of visual features and convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2157–2170. [Google Scholar] [CrossRef]
- Nagy, A.M.; Simon, V. Survey on traffic prediction in smart cities. Pervasive Mob. Comput. 2018, 50, 148–163. [Google Scholar] [CrossRef]
- Luo, X.; Li, D.; Yang, Y.; Zhang, S. Spatiotemporal traffic flow prediction with KNN and LSTM. J. Adv. Transp. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Tanwar, S.; Vora, J.; Tyagi, S.; Kumar, N.; Obaidat, M.S. A systematic review on security issues in vehicular ad hoc network. Secur. Priv. 2018, 1, e39. [Google Scholar] [CrossRef]
- Ravi, B.; Thangaraj, J.; Petale, S. Data Traffic Forwarding for Inter-vehicular Communication in VANETs Using Stochastic Method. Wirel. Pers. Commun. 2019, 106, 1591–1607. [Google Scholar] [CrossRef]
- Mackenzie, J.; Roddick, J.F.; Zito, R. An evaluation of HTM and LSTM for short-term arterial traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1847–1857. [Google Scholar] [CrossRef]
- Kang, D.; Lv, Y.; Chen, Y.Y. Short-term traffic flow prediction with LSTM recurrent neural network. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Shao, H.; Soong, B.H. Traffic flow prediction with long short-term memory networks (LSTMs). In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 2986–2989. [Google Scholar]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Soni, M.; Chauhan, S.; Bajpai, B.; Puri, T. An Approach To Enhance Fall Detection Using Machine Learning Classifier. In Proceedings of the 2020 12th International Conference on Computational Intelligence and Communication Networks (CICN), Bhimtal, India, 25–26 September 2020; pp. 229–233. [Google Scholar]
- Soni, M.; Gomathi, S. Cotton Leaf Spot Disease Detection using Multi-Class SVM. Int. J. Res. Eng. Adv. Technol. 2020, 8, 57–61. [Google Scholar]
- Kaur, S.; Awasthi, L.K.; Sangal, A.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Meenakshi, G.; Dhiman, G. Deep convolution neural network approach for defect inspection of textured surfaces. J. Inst. Electron. Comput. 2020, 2, 28–38. [Google Scholar]
- Dhiman, G.; Singh, K.K.; Slowik, A.; Chang, V.; Yildiz, A.R.; Kaur, A.; Garg, M. EMoSOA: A new evolutionary multi-objective seagull optimization algorithm for global optimization. Int. J. Mach. Learn. Cybern. 2021, 12, 571–596. [Google Scholar] [CrossRef]
- Dhiman, G. An Innovative Approach for Face Recognition Using Raspberry Pi. Artif. Intell. Evol. 2020, 1, 103–108. [Google Scholar] [CrossRef]
- Yuvaraj, N.; Srihari, K.; Chandragandhi, S.; Raja, R.A.; Dhiman, G.; Kaur, A. Analysis of protein-ligand interactions of SARS-Cov-2 against selective drug using deep neural networks. Big Data Min. Anal. 2020, 4, 76–83. [Google Scholar] [CrossRef]
- Dhiman, G.; Garg, M. MoSSE: A novel hybrid multi-objective meta-heuristic algorithm for engineering design problems. Soft Comput. 2020, 24, 18379–18398. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. HKn-RVEA: A novel many-objective evolutionary algorithm for car side impact bar crashworthiness problem. Int. J. Veh. Des. 2019, 80, 257–284. [Google Scholar] [CrossRef]
- Dhiman, G.; Garg, M.; Nagar, A.; Kumar, V.; Dehghani, M. A novel algorithm for global optimization: Rat swarm optimizer. J. Ambient. Intell. Hum. Comput. 2020. [Google Scholar] [CrossRef]
- Meenakshi, G.; Dhiman, G. A novel content based image retrieval approach for classification using glcm features and texture fused lbp variants. Neural. Comput. Appl. 2020. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Spotted hyena optimizer: A novel bio-inspired based metaheuristic technique for engineering applications. Adv. Eng. Softw. 2017, 114, 48–70. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Emperor penguin optimizer: A bio-inspired algorithm for engineering problems. Knowl. Based Syst. 2018, 159, 20–50. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Gheisari, M.; Esnaashari, M. A survey to face recognition algorithms: Advantageous and disadvantageous. J. Mod. Technol. Eng. 2017, 2, 57–65. [Google Scholar]
- Dehghani, M.; Montazeri, Z.; Malik, O.P.; Dhiman, G.; Kumar, V. BOSA: Binary Orientation Search Algorithm. Int. J. Innov. Technol. Explor. Eng. 2019, 9, 5306–5310. [Google Scholar]
- Dehghani, M.; Montazeri, Z.; Dehghani, A.; Ramirez-Mendoza, R.A.; Samet, H.; Guerrero, J.M.; Dhiman, G. MLO: Multi Leader Optimizer. Int. J. Intell. Eng. Syst. 2020, 13, 364–373. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Givi, H.; Guerrero, J.M.; Dhiman, G. Darts Game Optimizer: A New Optimization Technique Based on Darts Game. Int. J. Intell. Eng. Syst. 2020, 13, 286–294. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Dhiman, G.; Malik, O.P.; Morales-Menendez, R.; Ramirez-Mendoza, R.A.; Dehghani, A.; Guerrero, J.M.; Parra-Arroyo, L. A Spring Search Algorithm Applied to Engineering Optimization Problems. Appl. Sci. 2020, 10, 6173. [Google Scholar] [CrossRef]
- Dhiman, G.; Oliva, D.; Kaur, A.; Singh, K.K.; Vimal, S.; Sharma, A.; Cengiz, K. BEPO: A novel binary emperor penguin optimizer for automatic feature selection. Knowl. Based Syst. 2021, 211, 106560. [Google Scholar] [CrossRef]
- Dhiman, G.; Singh, K.K.; Soni, M.; Nagar, A.; Dehghani, M.; Slowik, A.; Kaur, A.; Sharma, A.; Houssein, E.H.; Cengiz, K. MOSOA: A new multi-objective seagull optimization algorithm. Expert Syst. Appl. 2020, 114150. [Google Scholar] [CrossRef]
- Dhiman, G. ESA: A hybrid bio-inspired metaheuristic optimization approach for engineering problems. Eng. Comput. 2019, 37, 323–353. [Google Scholar] [CrossRef]
- Dhiman, G. MOSHEPO: A hybrid multi-objective approach to solve economic load dispatch and micro grid problems. Appl. Intell. 2020, 50, 119–137. [Google Scholar] [CrossRef]
- Singh, P.; Dhiman, G. A Fuzzy-LP Approach in Time Series Forecasting. In Pattern Recognition and Machine Intelligence; Shankar, B., Ghosh, K., Mandal, D., Ray, S., Zhang, D., Pal, S., Eds.; Springer: Cham, Germany, 2017; Volume 10597. [Google Scholar] [CrossRef]
- Fu, R.; Zhang, Z.; Li, L. Using LSTM and GRU neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 324–328. [Google Scholar]
- Sharma, A.; Kumar, R. A framework for pre-computated multi-constrained quickest QoS path algorithm. J. Telecommun. Electron. Comput. Eng. JTEC 2017, 9, 73–77. [Google Scholar]
- Limbasiya, T.; Soni, M.; Mishra, S.K. Advanced Formal Authentication Protocol Using Smart Cards for Network Applicants. Comput. Electr. Eng. 2018, 66, 50–63. [Google Scholar]
- Sethuraman, J.; Alzubi, J.; Manikandan, R.; Gheisari, M.; Kumar, A. Eccentric Methodology with Optimization to Unearth Hidden Facts of Search Engine Result Pages. Recent Pat. Comput. Sci. 2018, 12, 110–119. [Google Scholar] [CrossRef]
- Dhiman, G.; Soni, M.; Slowik, A.; Kaur, H. A Novel Hybrid Evolutionary Algorithm based on Hypervolume Indicator and Reference Vector Adaptation Strategies for Many-Objective Optimization. Eng. Comput. 2020. [Google Scholar] [CrossRef]
- Soni, M.; Kumar, D. Wavelet Based Digital Watermarking Scheme for Medical Images. In Proceedings of the 2020 12th International Conference on Computational Intelligence and Communication Networks (CICN), Bhimtal, India, 25–26 September 2020; pp. 403–407. [Google Scholar] [CrossRef]
- Soni, M.; Singh, D.K. Privacy Preserving Authentication and Key management protocol for health information System. In Data Protection and Privacy in Healthcare: Research and Innovations; Elngar, A., Pawar, A., Churi, P., Eds.; CRC Press: Boca Raton, FL, USA, 2021; p. 37. [Google Scholar]
- Soni, M.; Patel, T.; Jain, A. Security Analysis on Remote User Authentication Methods. In Proceeding of the International Conference on Computer Networks, Big Data and IoT (ICCBI-2018); Pandian, A., Senjyu, T., Islam, S., Wang, H., Eds.; Springer: Cham, Germany, 2019; Volume 31. [Google Scholar] [CrossRef]
- Patel, M.; Rami, D.; Soni, M. Next Generation Web for Alumni Web Portal. In Intelligent Communication Technologies and Virtual Mobile Networks ICICV 2019; Balaji, S., Rocha, Á., Chung, Y.N., Eds.; Springer: Cham, Germany, 2020; Volume 33. [Google Scholar] [CrossRef]
- Soni, M.; Jain, A. Secure Communication and Implementation Technique for Sybil Attack in Vehicular Ad-Hoc Networks. In Proceedings of the 2018 Second International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 15–16 February 2018; pp. 539–543. [Google Scholar] [CrossRef]
- Chaudhary, U.; Patel, A.; Patel, A.; Soni, M. Survey Paper on Automatic Vehicle Accident Detection and Rescue System. In Data Science and Intelligent Applications; Kotecha, K., Piuri, V., Shah, H., Patel, R., Eds.; Springer: Singapore, 2021; Volume 52. [Google Scholar] [CrossRef]
- Soni, M.; Rajput, B.S. Security and Performance Evaluations of QUIC Protocol. In Data Science and Intelligent Applications; Kotecha, K., Piuri, V., Shah, H., Patel, R., Eds.; Springer: Singapore, 2021; Volume 52. [Google Scholar] [CrossRef]
- Soni, M.; Jain, A.; Patel, T. Human Movement Identification Using Wi-Fi Signals. In Proceedings of the 2018 3rd International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 15–16 November 2018; pp. 422–427. [Google Scholar]
- Soni, M.; Patel, T. Systematic investigation on LargeScale simulations in big data systems. In Proceedings of the 2018 2nd International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2018; pp. 684–688. [Google Scholar]
- Soni, M.; Singh, D.P. Median First Tournament Sort. Int. J. Comput. Sci. Eng. Inf. Technol. Res. 2017, 7, 35–52. [Google Scholar]
- Gomathi, S.; Kohli, R.; Soni, M.; Dhiman, G.; Nair, R. Pattern analysis: Predicting COVID-19 pandemic in India using AutoML. World J. Eng. 2020. [Google Scholar] [CrossRef]
- Nair, R.; Vishwakarma, S.; Soni, M.; Patel, T.; Joshi, S. Detection of COVID-19 cases through X-ray images using hybrid deep neural network. World J. Eng. 2021. [Google Scholar] [CrossRef]
- Soni, M.; Gomathi, S.; Adhyaru, B.K.Y. Natural Language Processing for the Job Portal Enhancement. In Proceedings of the 2020 7th International Conference on Smart Structures and Systems (ICSSS), Chennai, India, 23–24 July 2020; pp. 1–4. [Google Scholar]
- Ku, I.; Lu, Y.; Gerla, M.; Gomes, R.L.; Ongaro, F.; Cerqueira, E. Towards software-defined VANET: Architecture and services. In Proceedings of the 2014 13th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; pp. 103–110. [Google Scholar]
- Chakri, A.; Ragueb, H.; Yang, X.S. Bat Algorithm and Directional Bat Algorithm with Case Studies. In Nature-Inspired Algorithms and Applied Optimization; Springer: Cham, Germany, 2018; pp. 189–216. [Google Scholar]
- Reis, J.; Rocha, M.; Phan, T.K.; Griffin, D.; Le, F.; Rio, M. Deep Neural Networks for Network Routing. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- McGill, M.; Perona, P. Deciding how to decide: Dynamic routing in artificial neural networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; Volume 70, pp. 2363–2372. [Google Scholar]
- Perez-Murueta, P.; Gómez-Espinosa, A.; Cardenas, C.; Gonzalez-Mendoza, M. Deep Learning System for Vehicular Re-Routing and Congestion Avoidance. Appl. Sci. 2019, 9, 2717. [Google Scholar] [CrossRef]
- Geyer, F.; Carle, G. Learning and generating distributed routing protocols using graph-based deep learning. In Proceedings of the 2018 Workshop on Big Data Analytics and Machine Learning for Data Communication Networks, Budapest, Hungary, 20 August 2018; pp. 40–45. [Google Scholar]
- Venkataram, P.; Ghosal, S.; Kumar, B.V. Neural network based optimal routing algorithm for communication networks. Neural Netw. 2002, 15, 1289–1298. [Google Scholar] [CrossRef]
- Poongodi, M.; Hamdi, M.; Sharma, A.; Ma, M.; Singh, P.K. DDoS detection mechanism using trust-based evaluation system in VANET. IEEE Access 2019, 7, 183532–183544. [Google Scholar] [CrossRef]
- Sharma, A.; Kumar, R. Service-level agreement—Energy cooperative quickest ambulance routing for critical healthcare services. Arab. J. Sci. Eng. 2019, 44, 3831–3848. [Google Scholar] [CrossRef]
- Rathee, G.; Sharma, A.; Iqbal, R.; Aloqaily, M.; Jaglan, N.; Kumar, R. A blockchain framework for securing connected and autonomous vehicles. Sensors 2019, 19, 3165. [Google Scholar] [CrossRef]
- Sharma, A.; Kumar, R. An optimal routing scheme for critical healthcare HTH services—An IOT perspective. In Proceedings of the 2017 Fourth International Conference on Image Information Processing (ICIIP), Shimla, India, 21–23 December 2017; pp. 1–5. [Google Scholar]
- Chandrawat, R.K.; Kumar, R.; Garg, B.P.; Dhiman, G.; Kumar, S. An Analysis of Modeling and Optimization Production Cost Through Fuzzy Linear Programming Problem with Symmetric and Right Angle Triangular Fuzzy Number. In Proceedings of Sixth International Conference on Soft Computing for Problem Solving; Deep, K., Bansa, J.C., Das, K.N., Lal, A.K., Garg, H., Eds.; Springer: Singapore, 2017; Volume 546. [Google Scholar] [CrossRef]
- Kaur, A.; Dhiman, G. A Review on Search-Based Tools and Techniques to Identify Bad Code Smells in Object-Oriented Systems. In Harmony Search and Nature Inspired Optimization Algorithms; Advances in Intelligent Systems and Computing; Yadav, N., Yadav, A., Bansal, J., Deep, K., Kim, J., Eds.; Springer: Singapore, 2019; Volume 741. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. Spotted Hyena Optimizer for Solving Engineering Design Problems. In Proceedings of the 2017 International Conference on Machine Learning and Data Science (MLDS), Noida, India, 14–15 December 2017; pp. 114–119. [Google Scholar]
- Singh, P.; Dhiman, G. A hybrid fuzzy time series forecasting model based on granular computing and bio-inspired optimization approaches. J. Comput. Sci. 2018, 27, 370–385. [Google Scholar] [CrossRef]
- Sharma, A.; Kumar, R. A constrained framework for context-aware remote E-healthcare (CARE) services. Trans. Emerg. Telecommun. Technol. 2019, e3649. [Google Scholar] [CrossRef]
- Sharma, A.; Tomar, R.; Chilamkurti, N.; Kim, B.G. Blockchain based smart contracts for internet of medical things in e-healthcare. Electronics 2020, 9, 1609. [Google Scholar] [CrossRef]
- Sharma, A.; Kumar, R. Computation of the reliable and quickest data path for healthcare services by using service-level agreements and energy constraints. Arab. J. Sci. Eng. 2019, 44, 9087–9104. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Total vehicle units | 100–300 |
| Channel carrier frequency | 5.9 GHz |
| Packet length | Uniform |
| Maximum transmission | 20 mW |
| Simulation area | 1500 m × 1500 m |
| Vehicle velocity | 20–50 kph |
| Bit rate | 18 Mbps |
| Signal attenuation threshold | −90 dBm |
| Path loss coefficient | 2 |
| Transmission range | 500 m |
| MAC protocol | 802.11 p |
| Traffic type | CBR |
| Beacon interval | 0.5 s |
| Data rate of MAC | 6 Mb |
| Mobility model | Krauß model |
| CBR rate | 4 packets/sec |
| Simulation time | 1000 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kannan, S.; Dhiman, G.; Natarajan, Y.; Sharma, A.; Mohanty, S.N.; Soni, M.; Easwaran, U.; Ghorbani, H.; Asheralieva, A.; Gheisari, M. Ubiquitous Vehicular Ad-Hoc Network Computing Using Deep Neural Network with IoT-Based Bat Agents for Traffic Management. Electronics 2021, 10, 785. https://doi.org/10.3390/electronics10070785
Kannan S, Dhiman G, Natarajan Y, Sharma A, Mohanty SN, Soni M, Easwaran U, Ghorbani H, Asheralieva A, Gheisari M. Ubiquitous Vehicular Ad-Hoc Network Computing Using Deep Neural Network with IoT-Based Bat Agents for Traffic Management. Electronics. 2021; 10(7):785. https://doi.org/10.3390/electronics10070785
Chicago/Turabian StyleKannan, Srihari, Gaurav Dhiman, Yuvaraj Natarajan, Ashutosh Sharma, Sachi Nandan Mohanty, Mukesh Soni, Udayakumar Easwaran, Hamidreza Ghorbani, Alia Asheralieva, and Mehdi Gheisari. 2021. "Ubiquitous Vehicular Ad-Hoc Network Computing Using Deep Neural Network with IoT-Based Bat Agents for Traffic Management" Electronics 10, no. 7: 785. https://doi.org/10.3390/electronics10070785
APA StyleKannan, S., Dhiman, G., Natarajan, Y., Sharma, A., Mohanty, S. N., Soni, M., Easwaran, U., Ghorbani, H., Asheralieva, A., & Gheisari, M. (2021). Ubiquitous Vehicular Ad-Hoc Network Computing Using Deep Neural Network with IoT-Based Bat Agents for Traffic Management. Electronics, 10(7), 785. https://doi.org/10.3390/electronics10070785