
Predictive Fixed Switching Maximum Power Point Tracking Algorithm with Dual Adaptive Step-Size for PV Systems





Abstract
:1. Introduction
- Predictive fixed switching MPPT technique implementation with only two sensors and without need for PI controller, which simplifies the overall control scheme.
- Dual adaptive step-size design of the duty cycle command to reduce the oscillation at steady state.
- Multiobjective control for the inversion stage, which are current control and switching frequency minimization.
- Experimental verification of the proposed MPPT and inverter control at different operating conditions.
2. Model of the Two-Stage PV System
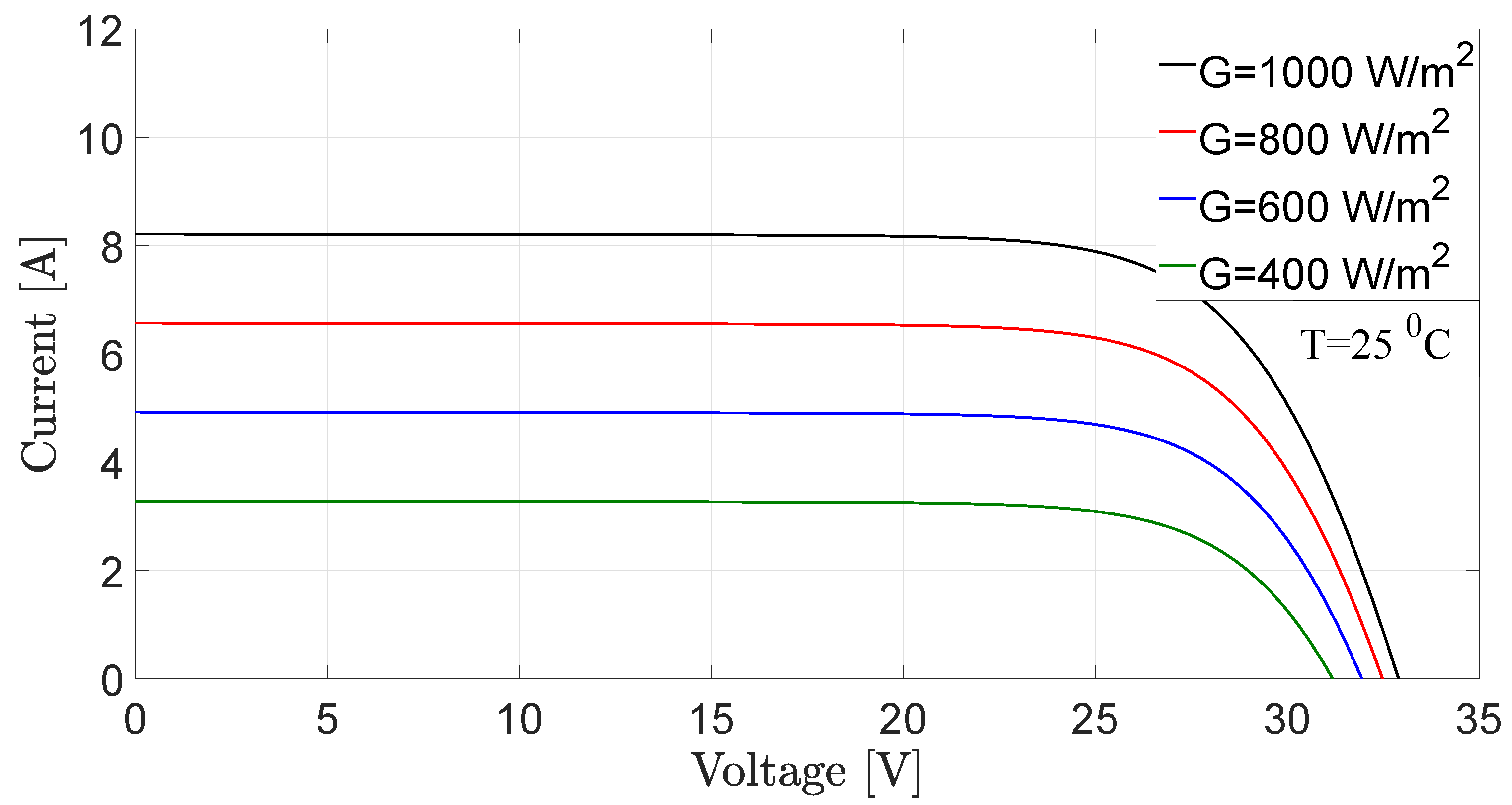
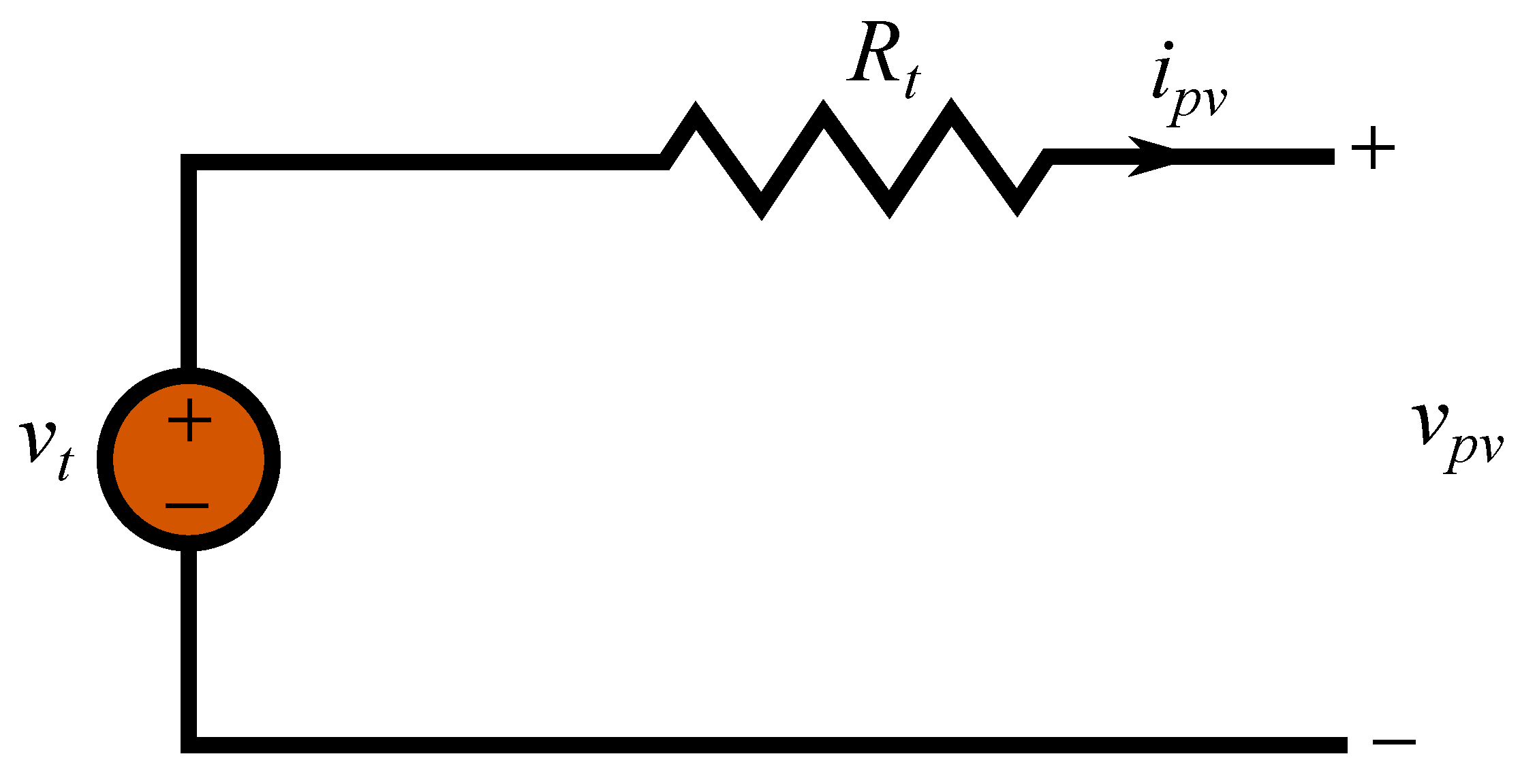
2.1. PV Source Modeling
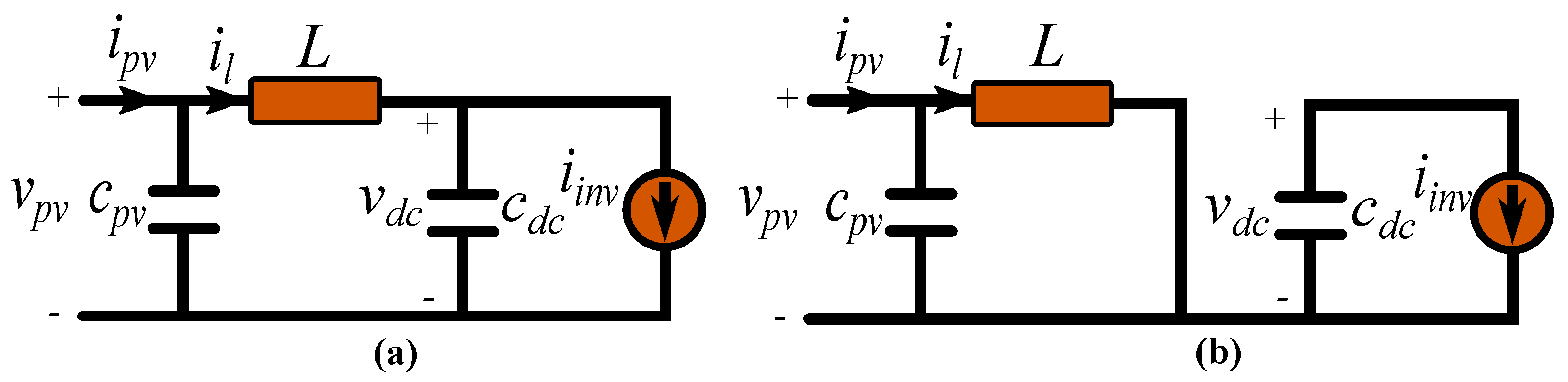
2.2. Boost Converter Model
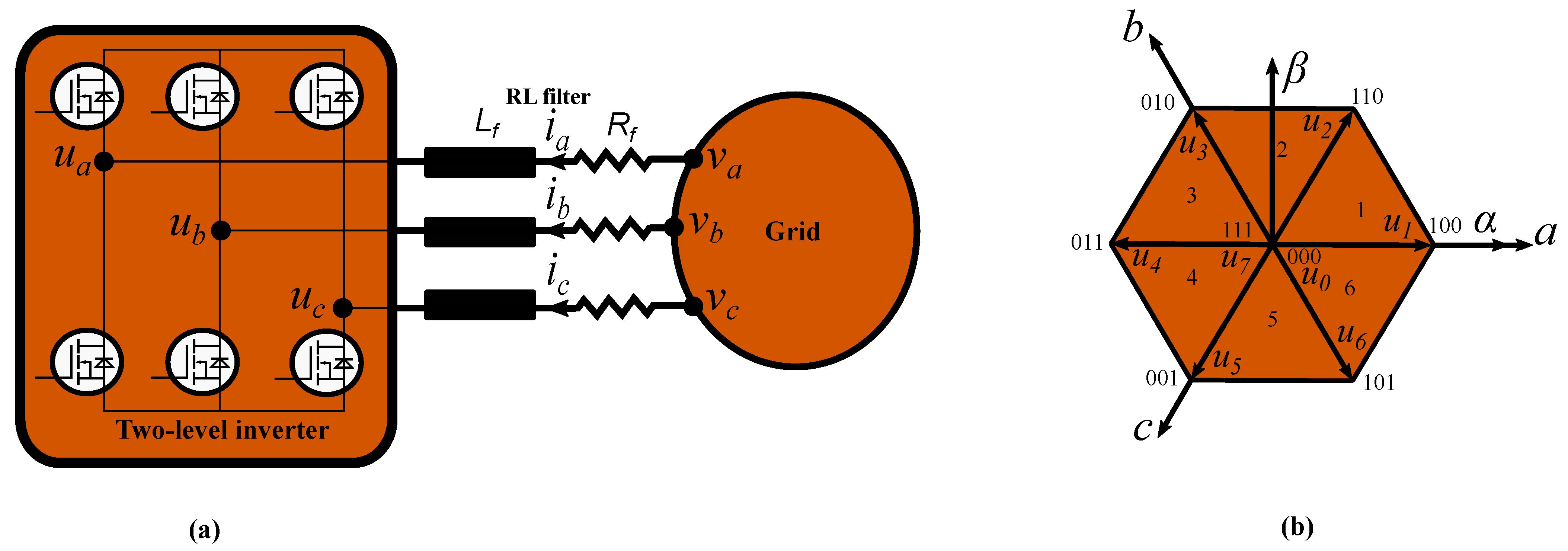
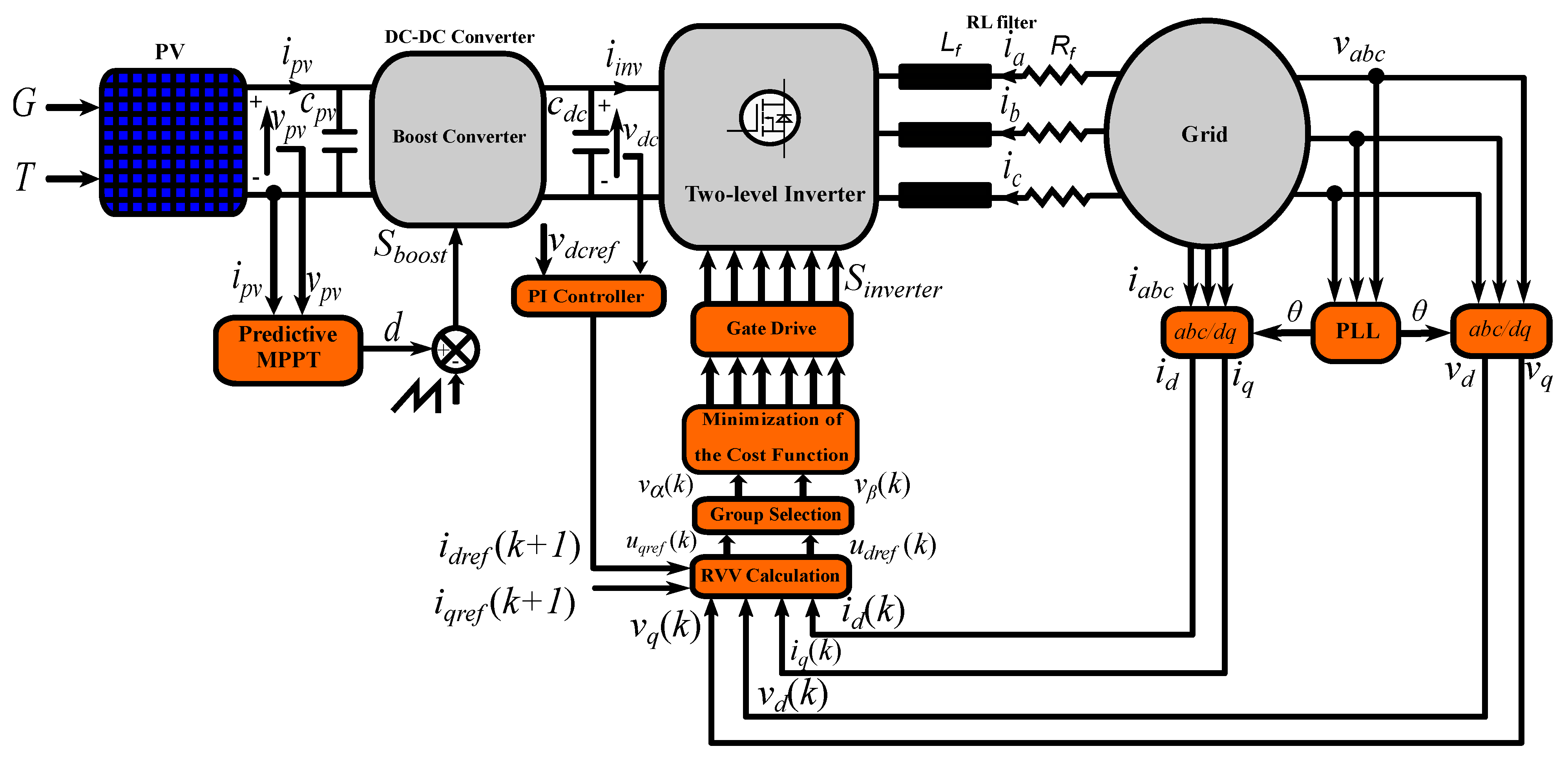
2.3. Model of the Two-Level Inverter with Grid Connection
3. The Proposed Control Strategy for the Two-Stage PV System
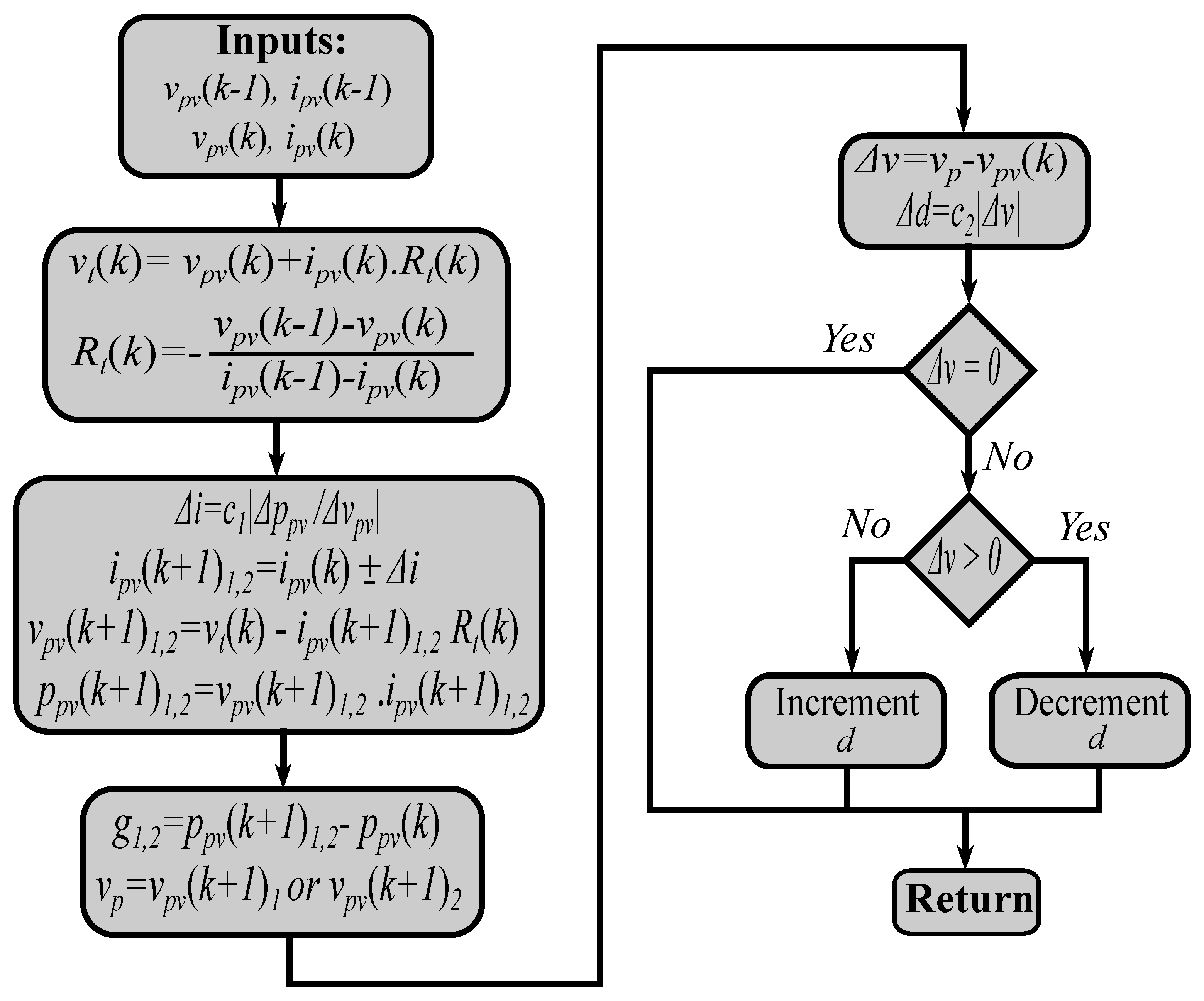
3.1. Predictive Fixed Switching MPPT with Dual Adaptive Step-Size Design
3.2. Multiobjective FS-MPC with Reduced Computation Burden for Grid Integration
4. Experimental Results and Discussion
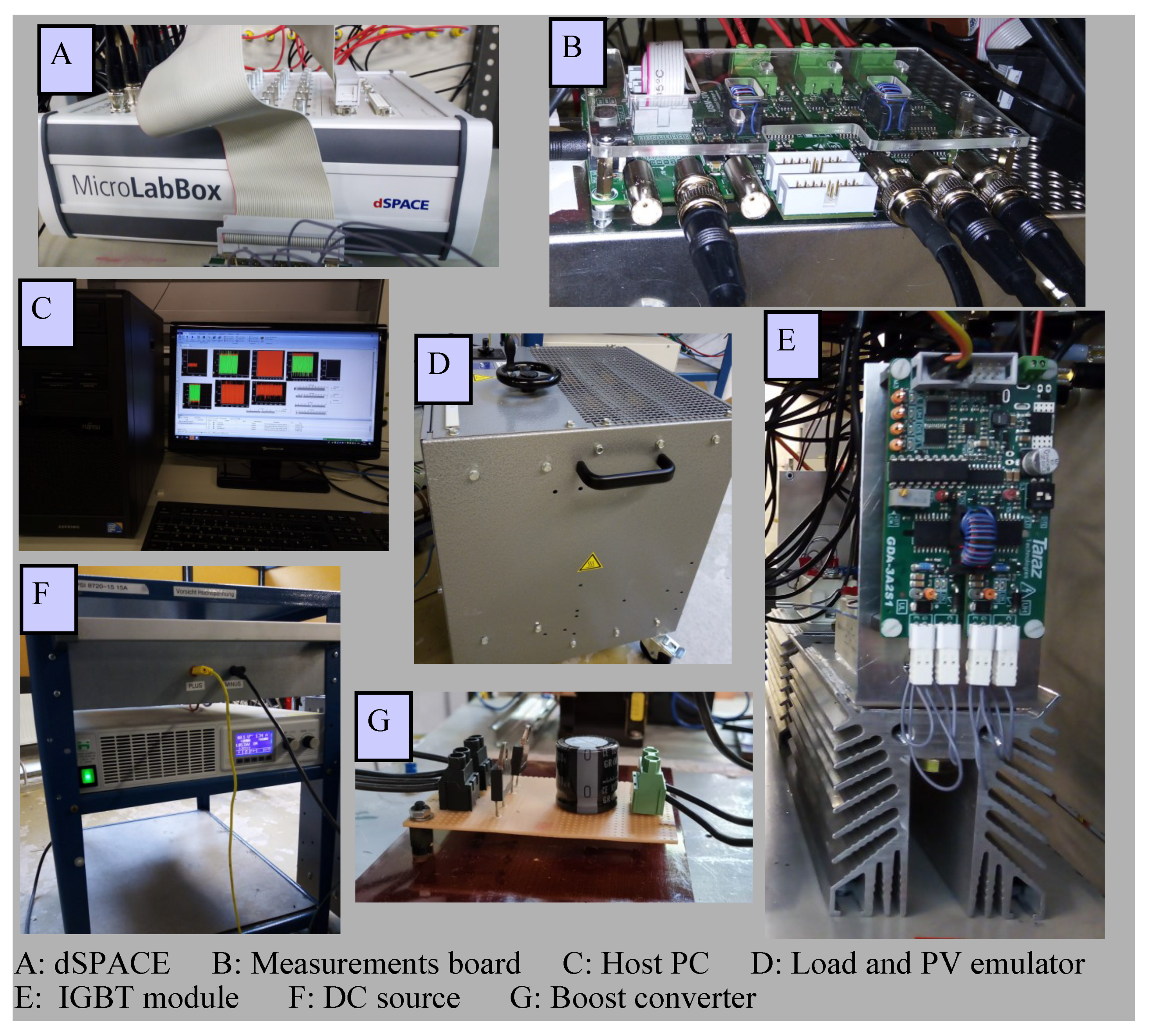
4.1. Test Bench Description
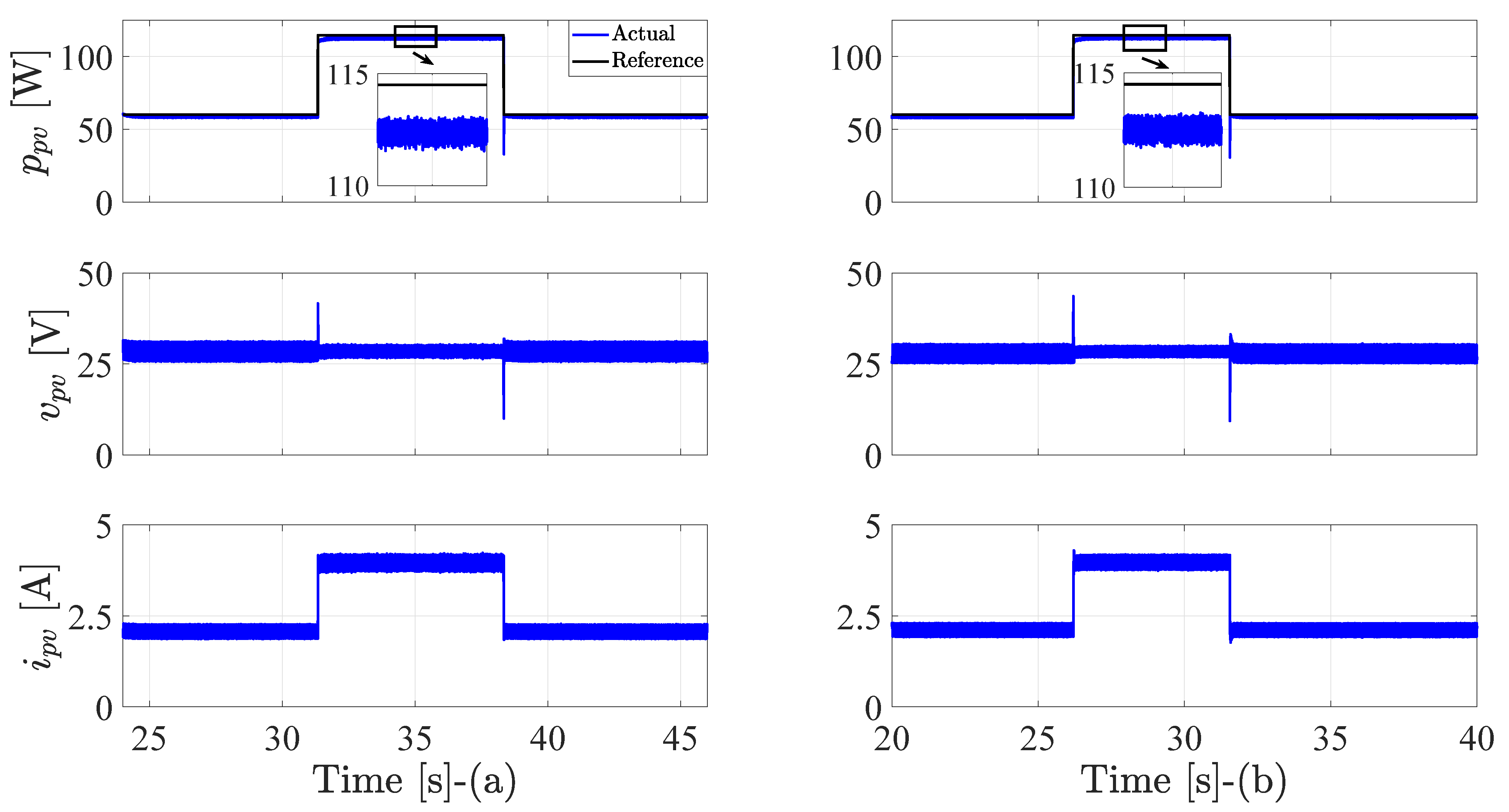
4.2. Evaluation of MPPT Behavior
4.3. Inverter Control Results
5. Future Work
- Investigation of the MPPT at dynamic operating conditions, in which the atmospheric conditions may have a slow or fast varying manner.
- Comparative evaluation against the FS-MPC technique and other similar approaches for MPPT.
- Further simplification for the FS-MPC to reduce its computational burden and include different control objectives.
- Online adjustment of the weighting factor using intelligent techniques (optimization methods). Even more, elimination of the weighting factor in the cost function design to simplify the control objective and remove tuning efforts.
- Robustness assessment and enhancement for the FS-MPC method. In this matter, analytical methods or observers can be utilized.
- Implementing the control methodology with fewer sensors to improve the system’s reliability. In fact, these sensorless strategies can be an effective back-up during disturbances, noise, or even sensor failure.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Owusu-Nyarko, I.; Elgenedy, M.A.; Abdelsalam, I.; Ahmed, K.H. Modified variable step-size incremental conductance MPPT technique for photovoltaic systems. Electronics 2021, 10, 2331. [Google Scholar] [CrossRef]
- Javed, M.Y.; Mirza, A.F.; Hasan, A.; Rizvi, S.T.H.; Ling, Q.; Gulzar, M.M.; Safder, M.U.; Mansoor, M. A comprehensive review on a PV based system to harvest maximum power. Electronics 2019, 8, 1480. [Google Scholar] [CrossRef] [Green Version]
- Bayod-Rújula, Á.A.; Cebollero-Abián, J.A. A novel MPPT method for PV systems with irradiance measurement. Sol. Energy 2014, 109, 95–104. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M.H.; Othman, M.F. A novel evaluation index for the photovoltaic maximum power point tracker techniques. Sol. Energy 2018, 174, 940–956. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; Melo, G.d.A.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2012, 60, 1156–1167. [Google Scholar] [CrossRef]
- Bhatnagar, P.; Nema, R.K. Maximum power point tracking control techniques: State-of-the-art in photovoltaic applications. Renew. Sustain. Energy Rev. 2013, 23, 224–241. [Google Scholar] [CrossRef]
- Ram, J.P.; Babu, T.S.; Rajasekar, N. A comprehensive review on solar PV maximum power point tracking techniques. Renew. Sustain. Energy Rev. 2017, 67, 826–847. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Analysis of the performance of DC photovoltaic pumping systems with maximum power point tracking. In Proceedings of the 4th IET International Conference on Power Electronics, Machines and Drives (PEMD 2008), York, UK, 2–4 April 2008; pp. 426–430. [Google Scholar]
- Ahmed, M.; Abdelrahem, M.; Kennel, R. Highly efficient and robust grid connected photovoltaic system based model predictive control with kalman filtering capability. Sustainability 2020, 12, 4542. [Google Scholar] [CrossRef]
- Ahmed, M.; Abdelrahem, M.; Harbi, I.; Kennel, R. An Adaptive Model-Based MPPT Technique with Drift-Avoidance for Grid-Connected PV Systems. Energies 2020, 13, 6656. [Google Scholar] [CrossRef]
- Ahmed, M.; Harbi, I.; Kennel, R.; Abdelrahem, M. Dual-Mode Power Operation for Grid-Connected PV Systems with Adaptive DC-link Controller. Arab. J. Sci. Eng. 2021, 1–15. [Google Scholar] [CrossRef]
- Kakosimos, P.E.; Kladas, A.G. Implementation of photovoltaic array MPPT through fixed step predictive control technique. Renew. Energy 2011, 36, 2508–2514. [Google Scholar] [CrossRef]
- Shadmand, M.; Balog, R.S.; Rub, H.A. Maximum Power Point Tracking using Model Predictive Control of a flyback converter for photovoltaic applications. In Proceedings of the 2014 Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 28 February–1 March 2014; pp. 1–5. [Google Scholar]
- Metry, M.; Shadmand, M.B.; Balog, R.S.; Abu-Rub, H. MPPT of photovoltaic systems using sensorless current-based model predictive control. IEEE Trans. Ind. Appl. 2016, 53, 1157–1167. [Google Scholar] [CrossRef]
- Mosa, M.; Shadmand, M.B.; Balog, R.S.; Rub, H.A. Efficient maximum power point tracking using model predictive control for photovoltaic systems under dynamic weather condition. IET Renew. Power Gener. 2017, 11, 1401–1409. [Google Scholar] [CrossRef]
- Sajadian, S.; Ahmadi, R. Model predictive-based maximum power point tracking for grid-tied photovoltaic applications using a Z-source inverter. IEEE Trans. Power Electron. 2016, 31, 7611–7620. [Google Scholar] [CrossRef]
- Abushaiba, A.A.; Eshtaiwi, S.M.M.; Ahmadi, R. A new model predictive based maximum power point tracking method for photovoltaic applications. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0571–0575. [Google Scholar]
- Abdel-Rahim, O.; Alamir, N.; Abdelrahem, M.; Orabi, M.; Kennel, R.; Ismeil, M.A. A phase-shift-modulated LLC-Resonant micro-inverter based on fixed frequency predictive-MPPT. Energies 2020, 13, 1460. [Google Scholar] [CrossRef] [Green Version]
- Manoharan, P.; Subramaniam, U.; Babu, T.S.; Padmanaban, S.; Holm-Nielsen, J.B.; Mitolo, M.; Ravichandran, S. Improved perturb and observation maximum power point tracking technique for solar photovoltaic power generation systems. IEEE Syst. J. 2020, 15, 3024–3035. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Samanta, S.; Mishra, S. Steady Output and Fast Tracking MPPT (SOFT-MPPT) for P&O and InC Algorithms. IEEE Trans. Sustain. Energy 2020, 12, 293–302. [Google Scholar]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Killi, M.; Samanta, S. Modified perturb and observe MPPT algorithm for drift avoidance in photovoltaic systems. IEEE Trans. Ind. Electron. 2015, 62, 5549–5559. [Google Scholar] [CrossRef]
- Shongwe, S.; Hanif, M. Comparative analysis of different single-diode PV modeling methods. IEEE J. Photovoltaics 2015, 5, 938–946. [Google Scholar] [CrossRef]
- Chouder, A.; Silvestre, S.; Sadaoui, N.; Rahmani, L. Modeling and simulation of a grid connected PV system based on the evaluation of main PV module parameters. Simul. Model. Pract. Theory 2012, 20, 46–58. [Google Scholar] [CrossRef]
- Bellia, H.; Youcef, R.; Fatima, M. A detailed modeling of photovoltaic module using MATLAB. NRIAG J. Astron. Geophys. 2014, 3, 53–61. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, A.; Zhang, Z.; et al. Latest Advances of Model Predictive Control in Electrical Drives. Part I: Basic Concepts and Advanced Strategies. IEEE Trans. Power Electron. 2021. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. An improved perturb and observe (P&O) maximum power point tracking (MPPT) algorithm for higher efficiency. Appl. Energy 2015, 150, 97–108. [Google Scholar]
- Ahmed, J.; Salam, Z. A modified P&O maximum power point tracking method with reduced steady-state oscillation and improved tracking efficiency. IEEE Trans. Sustain. Energy 2016, 7, 1506–1515. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vectors | Switching States | Output Voltages , | Output Voltages ,, |
|---|---|---|---|
| 000 | 0 0 | 0 0 0 | |
| 100 | 0 | ||
| 110 | |||
| 010 | |||
| 011 | 0 | ||
| 001 | |||
| 101 | |||
| 111 | 0 0 | 0 0 0 |
| Parameter | Value |
|---|---|
| Boost inductance | mH |
| Output capacitor | |
| Power switch | single switch (IGBT-Module FF50R12RT4) |
| Diode | fast recovery diode BYW77PI200 |
| DC-link reference voltage | 50 V |
| Load resistance | |
| Load inductance | 11 mH |
| PV emulator resistors | / |
| Sampling time |
| Method | Tracking Speed | (%) |
|---|---|---|
| P&O with adaptive step-size | 7 | 97.45 |
| Predictive method with two adaptive step-size | 5 | 97.51 |
| Method | THD % |
|---|---|
| Conventional (low/high power) | 4.53/3.42 |
| Proposed (low/high power) | 4.68/3.44 |
| Method | Execution Time (s) | Avg. (kHz) |
|---|---|---|
| Conventional method | 15.34 | 2.26 |
| Proposed technique | 12.55 | 2.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, M.; Harbi, I.; Kennel, R.; Abdelrahem, M. Predictive Fixed Switching Maximum Power Point Tracking Algorithm with Dual Adaptive Step-Size for PV Systems. Electronics 2021, 10, 3109. https://doi.org/10.3390/electronics10243109
Ahmed M, Harbi I, Kennel R, Abdelrahem M. Predictive Fixed Switching Maximum Power Point Tracking Algorithm with Dual Adaptive Step-Size for PV Systems. Electronics. 2021; 10(24):3109. https://doi.org/10.3390/electronics10243109
Chicago/Turabian StyleAhmed, Mostafa, Ibrahim Harbi, Ralph Kennel, and Mohamed Abdelrahem. 2021. "Predictive Fixed Switching Maximum Power Point Tracking Algorithm with Dual Adaptive Step-Size for PV Systems" Electronics 10, no. 24: 3109. https://doi.org/10.3390/electronics10243109
APA StyleAhmed, M., Harbi, I., Kennel, R., & Abdelrahem, M. (2021). Predictive Fixed Switching Maximum Power Point Tracking Algorithm with Dual Adaptive Step-Size for PV Systems. Electronics, 10(24), 3109. https://doi.org/10.3390/electronics10243109