
Iterative Learning Sliding Mode Control for UAV Trajectory Tracking


Abstract
:1. Introduction
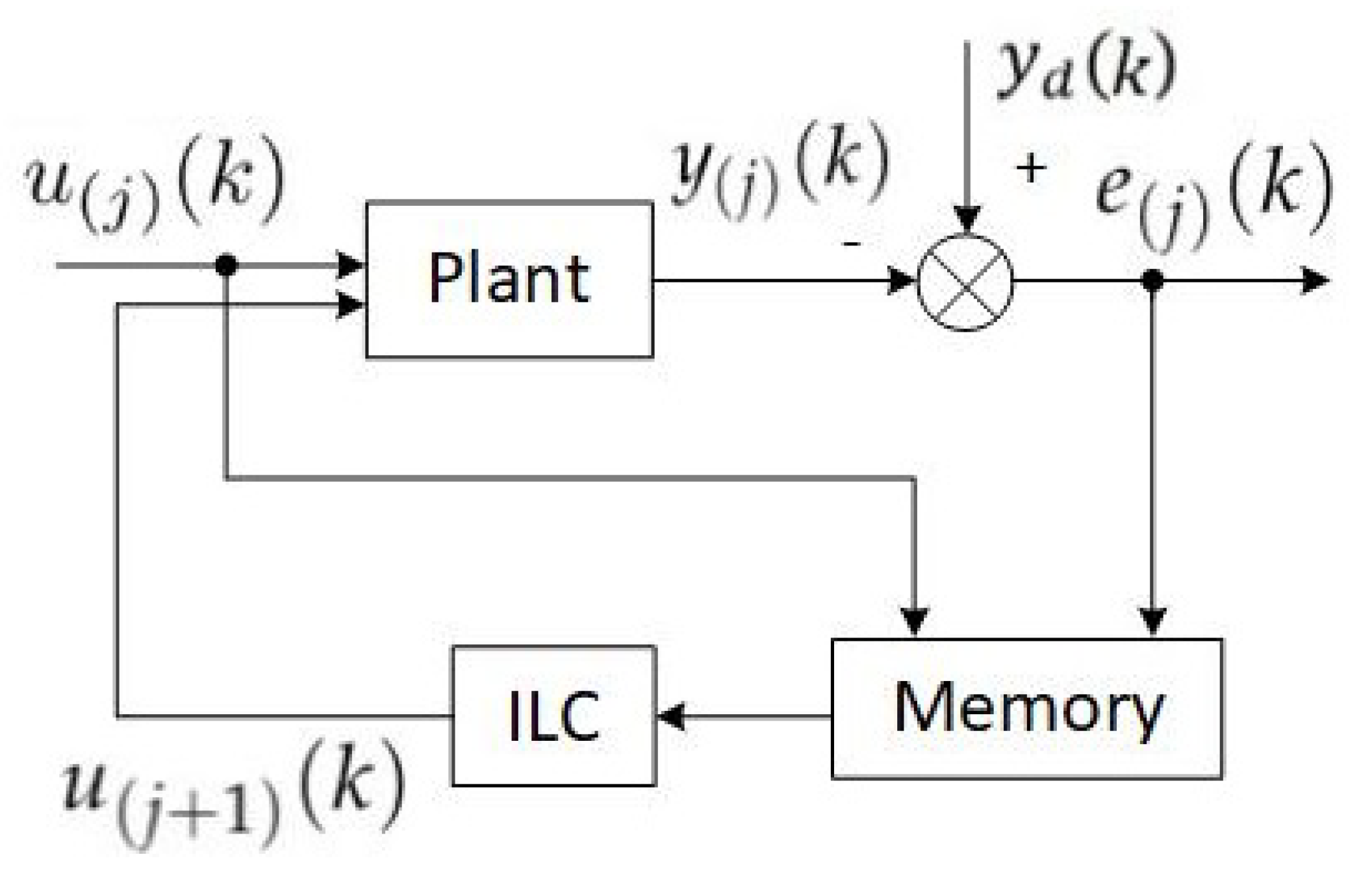
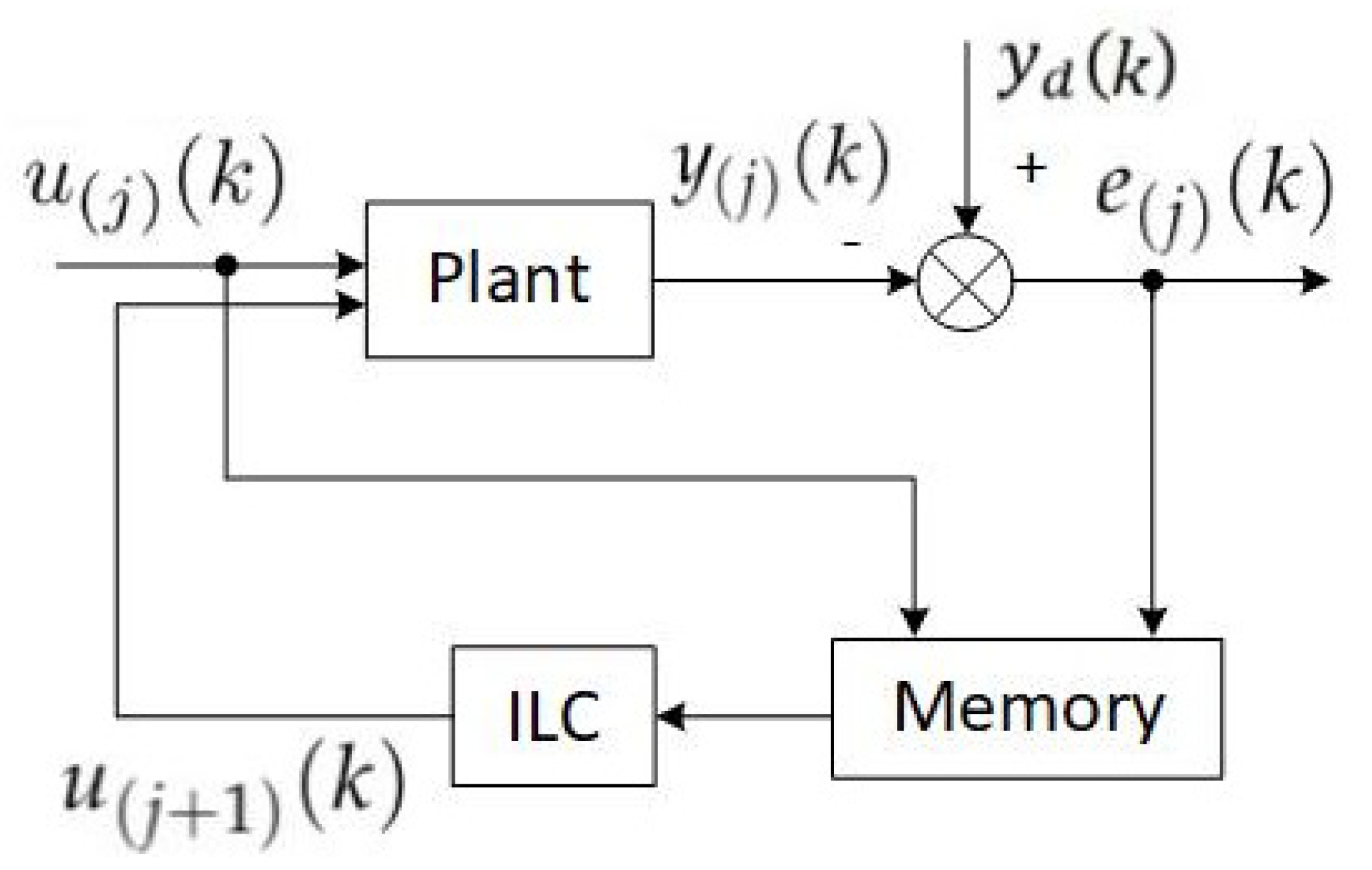
2. Iterative Learning Sliding Mode Control
2.1. ILSMC Design
2.1.1. Equivalent Control
2.1.2. Learning Control
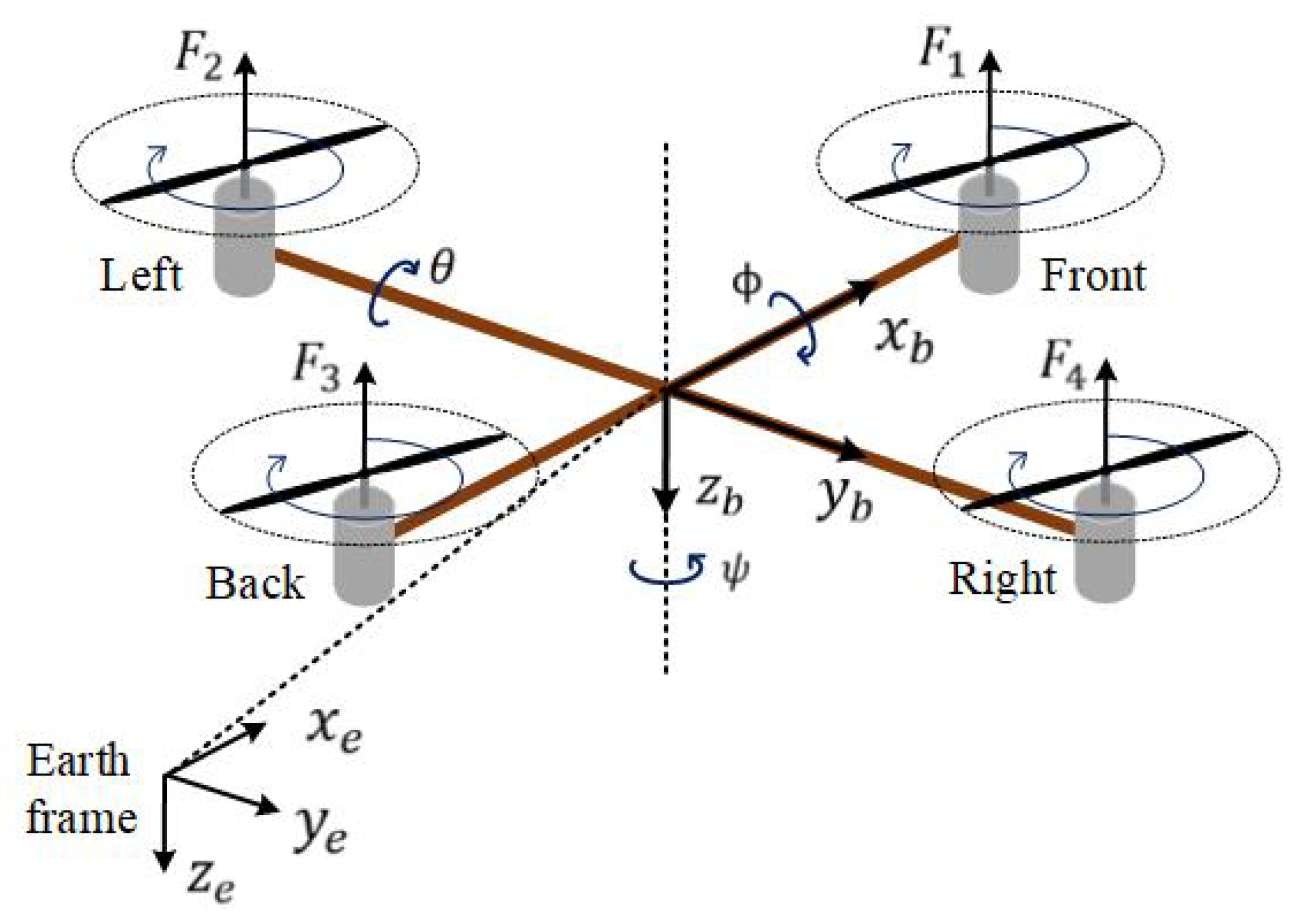
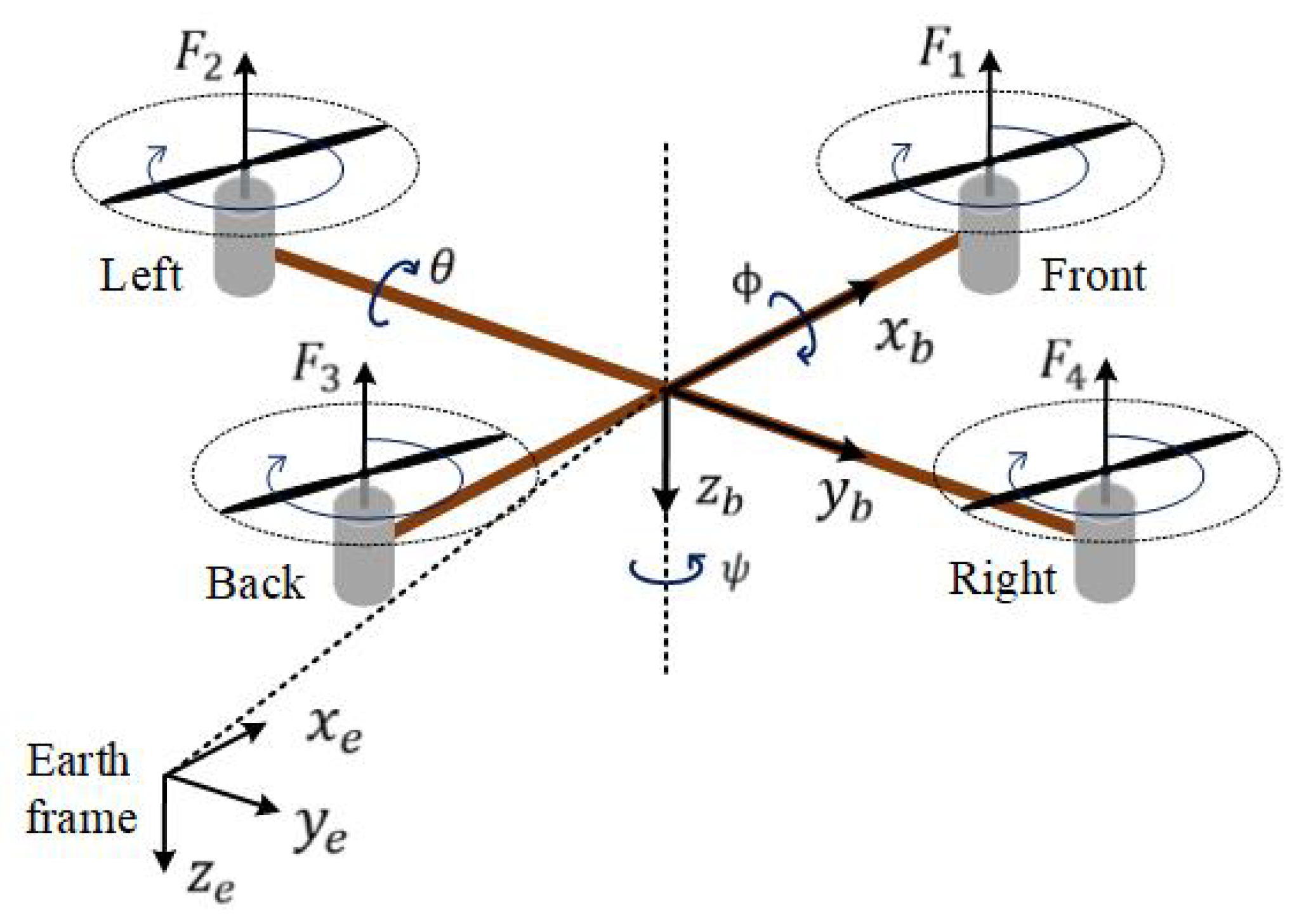
3. System Description and Modeling
3.1. Kinematics
3.2. Quadcopter Dynamics
3.3. Discrete-Time Model
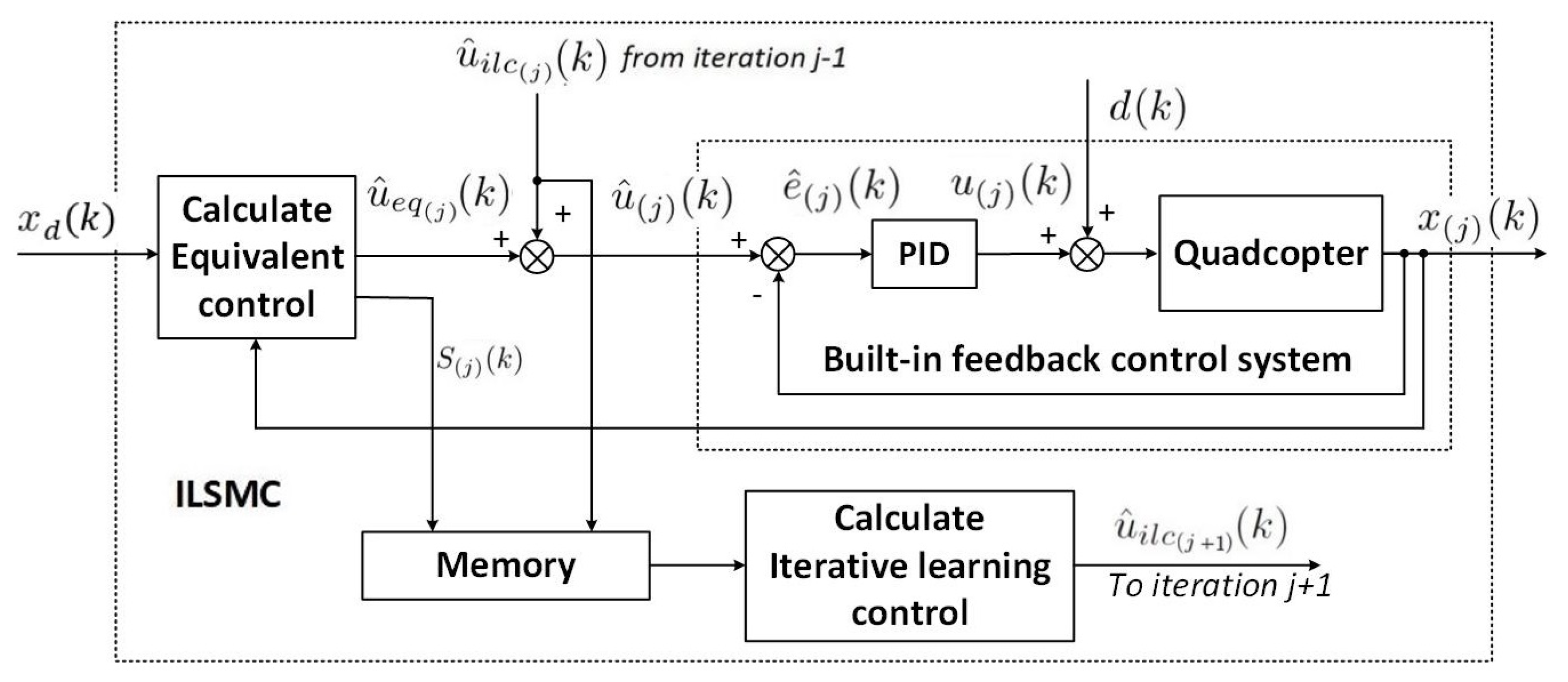
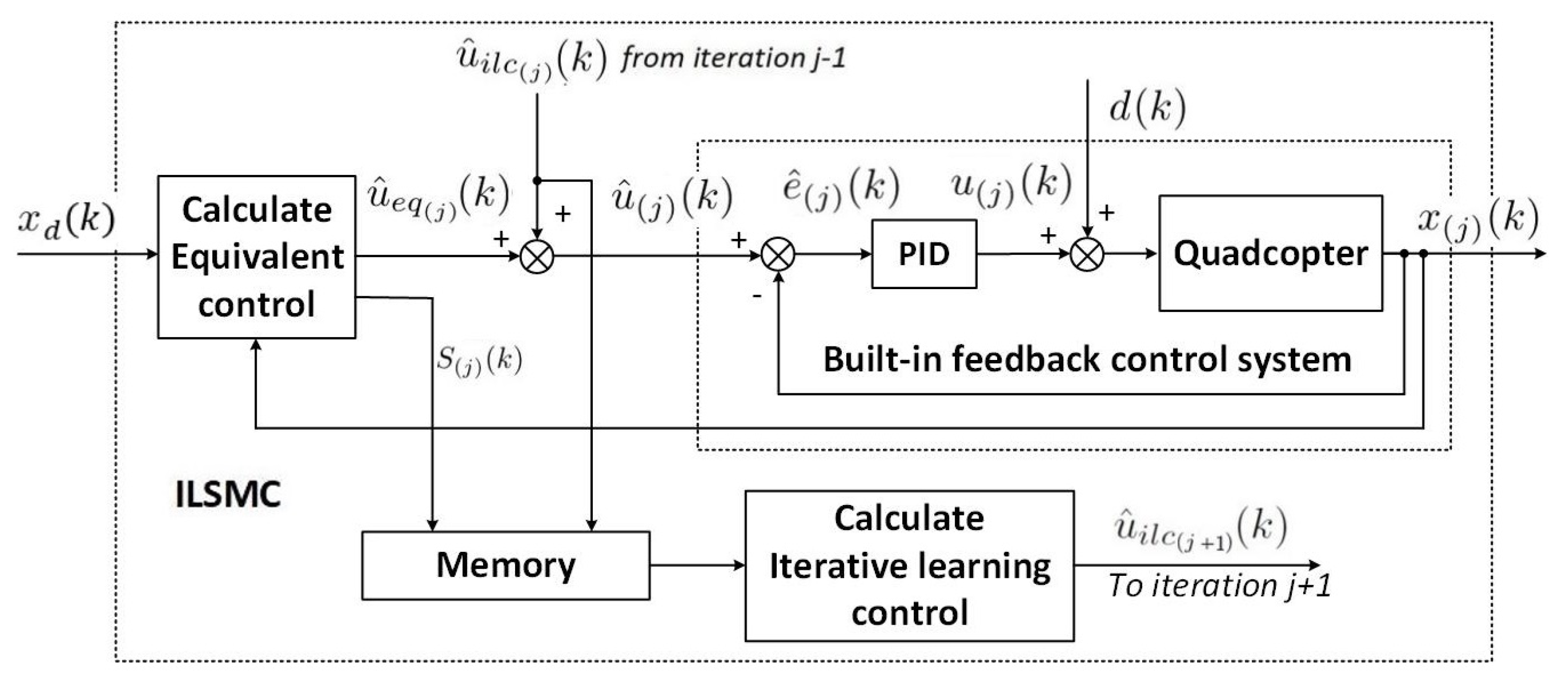
4. Integrated ILSMC for UAV Attitude Control
4.1. Inner-Loop PID Controller
4.2. Outer-Loop ILSMC
4.3. Implementation Procedure
- Step 1: Declare , .
- Step 2: Set , , and .
- Step 3: Compute the ILSMC from (61) as a reference to the inner loop.
- Step 4: Compute, from the measured states , , , , and the selected TPI.
- Step 5: Check if the tracking performance requirement is met to terminate the learning process. Otherwise, proceed to Step 6.
- Step 6: Set , update from (60), then return to Step 3.
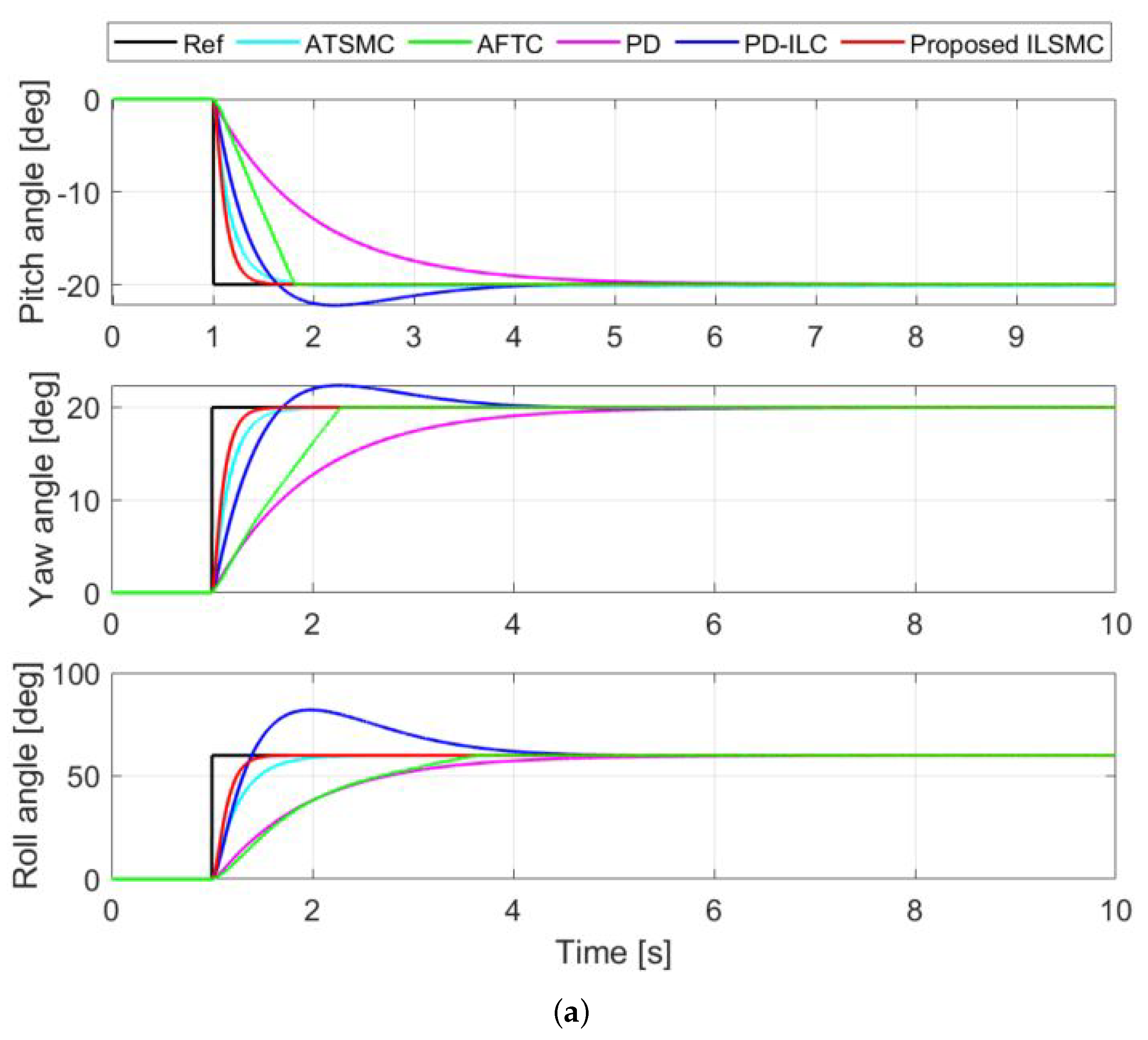
5. Simulation Results
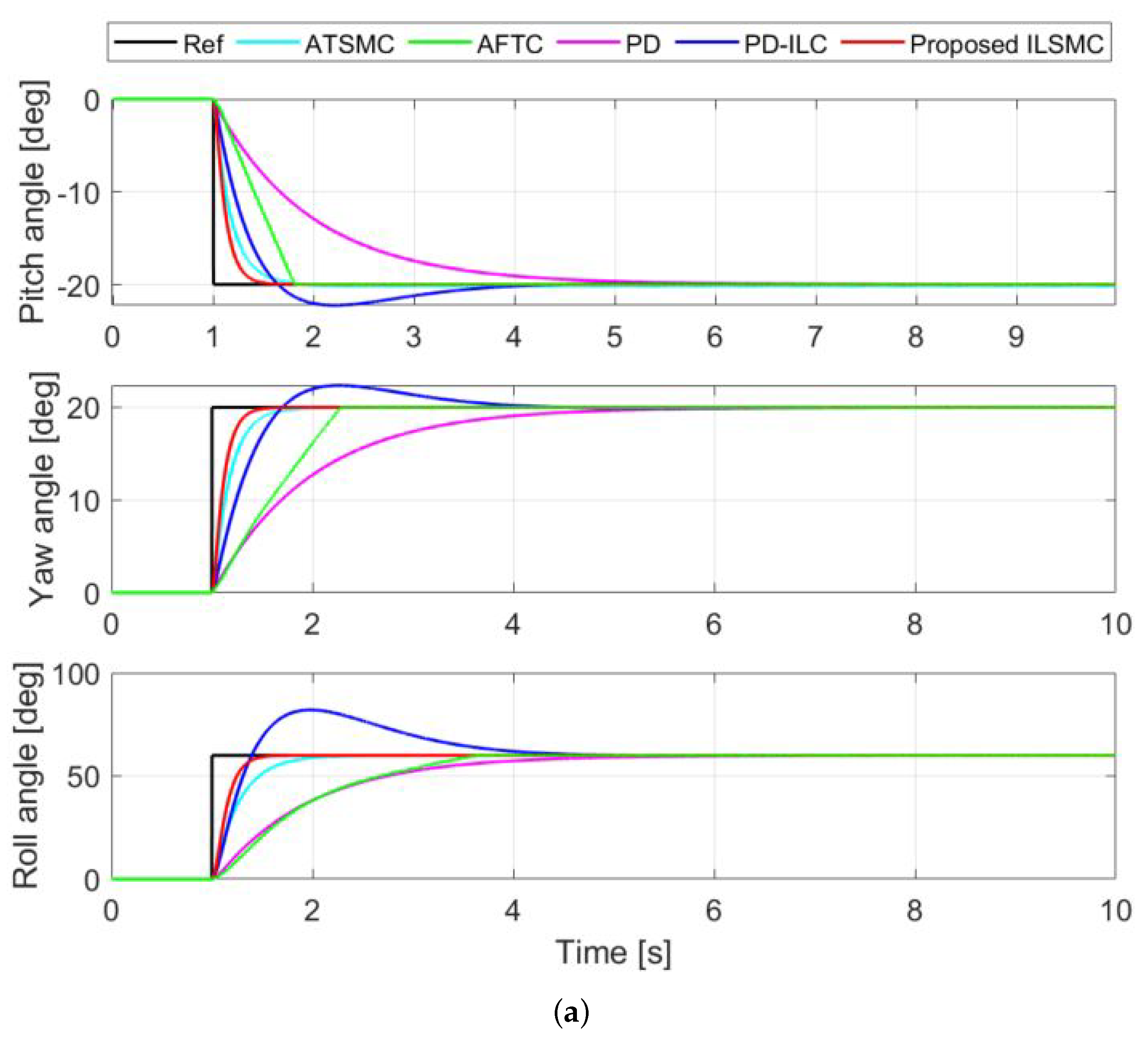
5.1. Step Response in Nominal Conditions
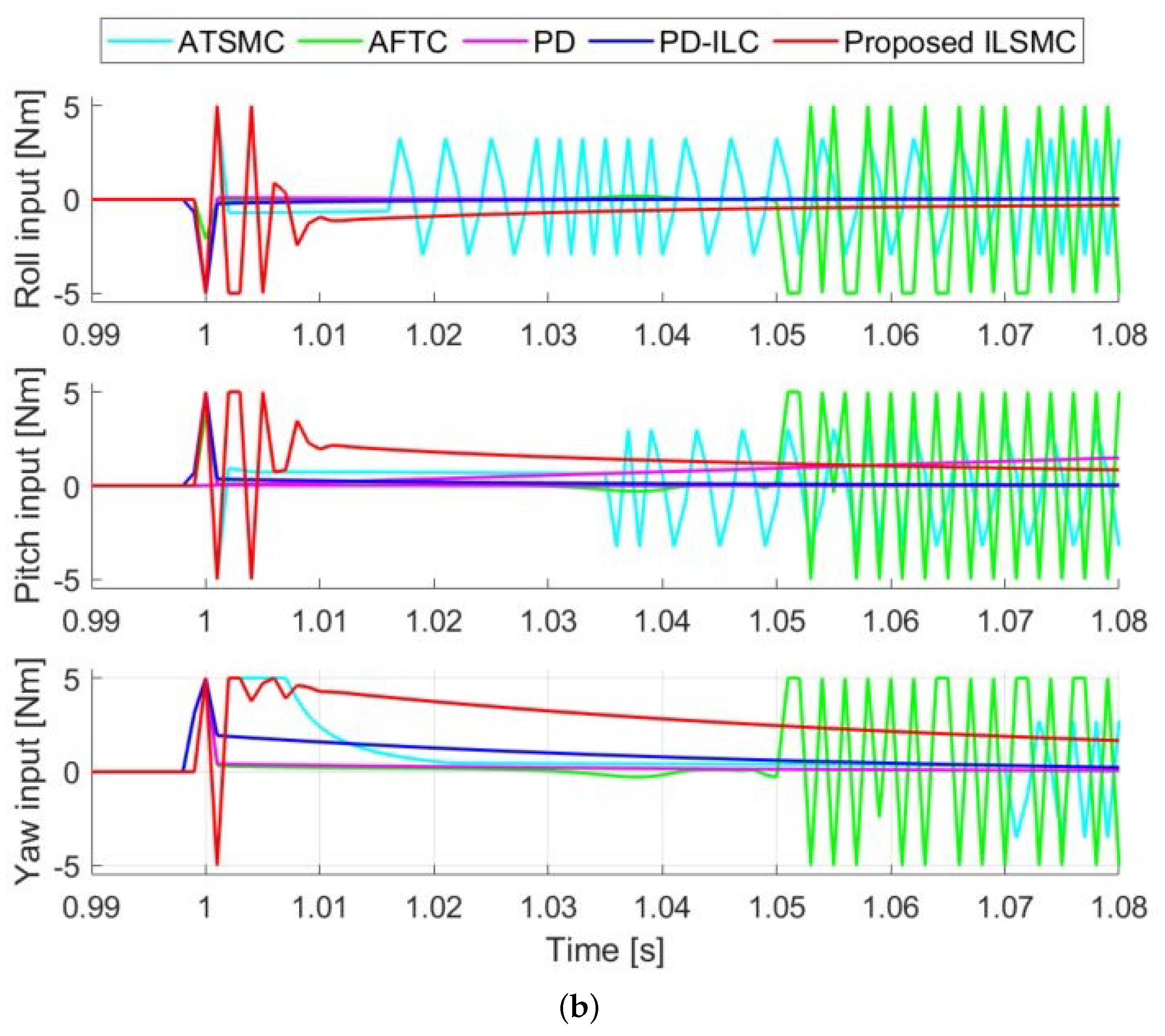
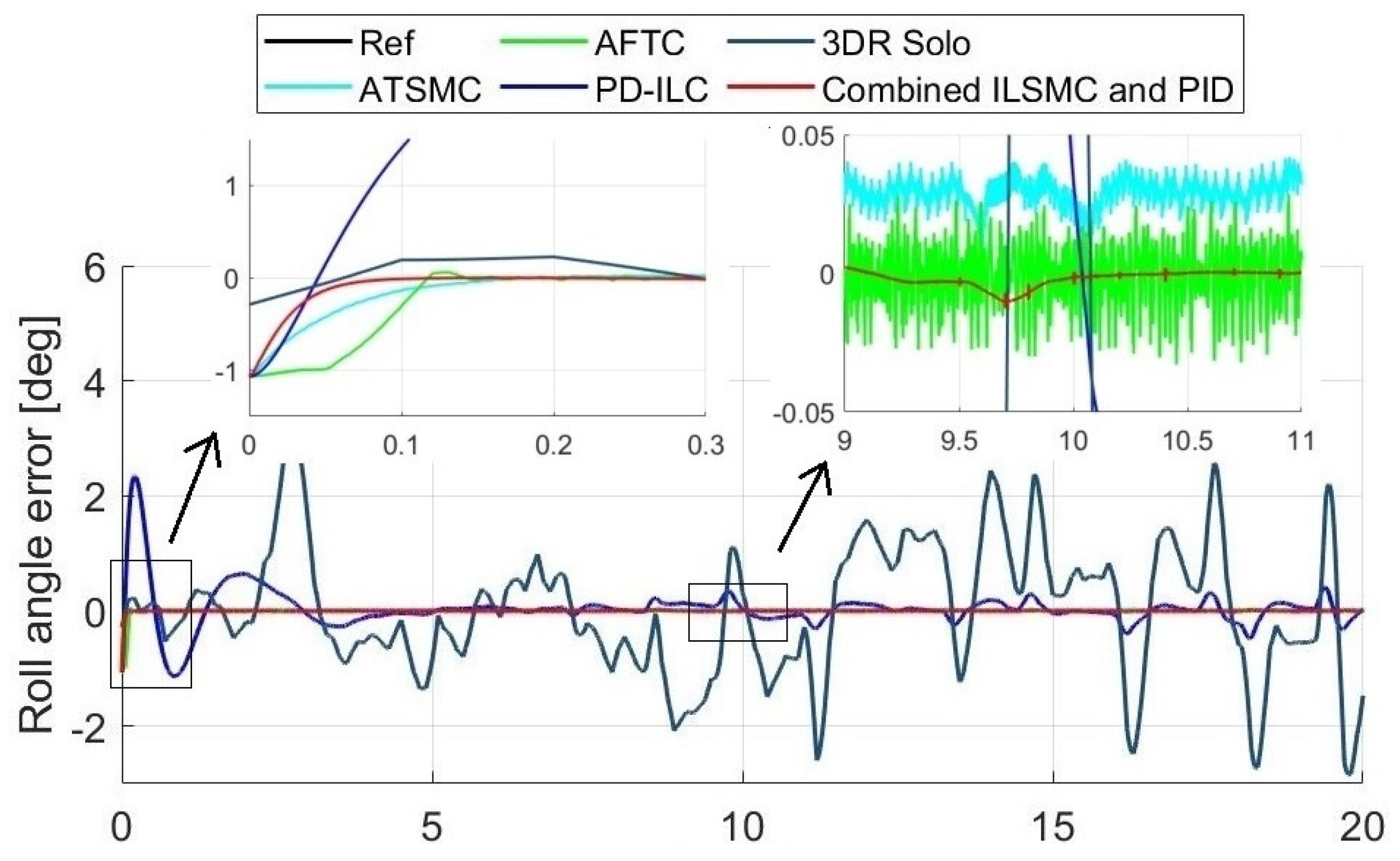
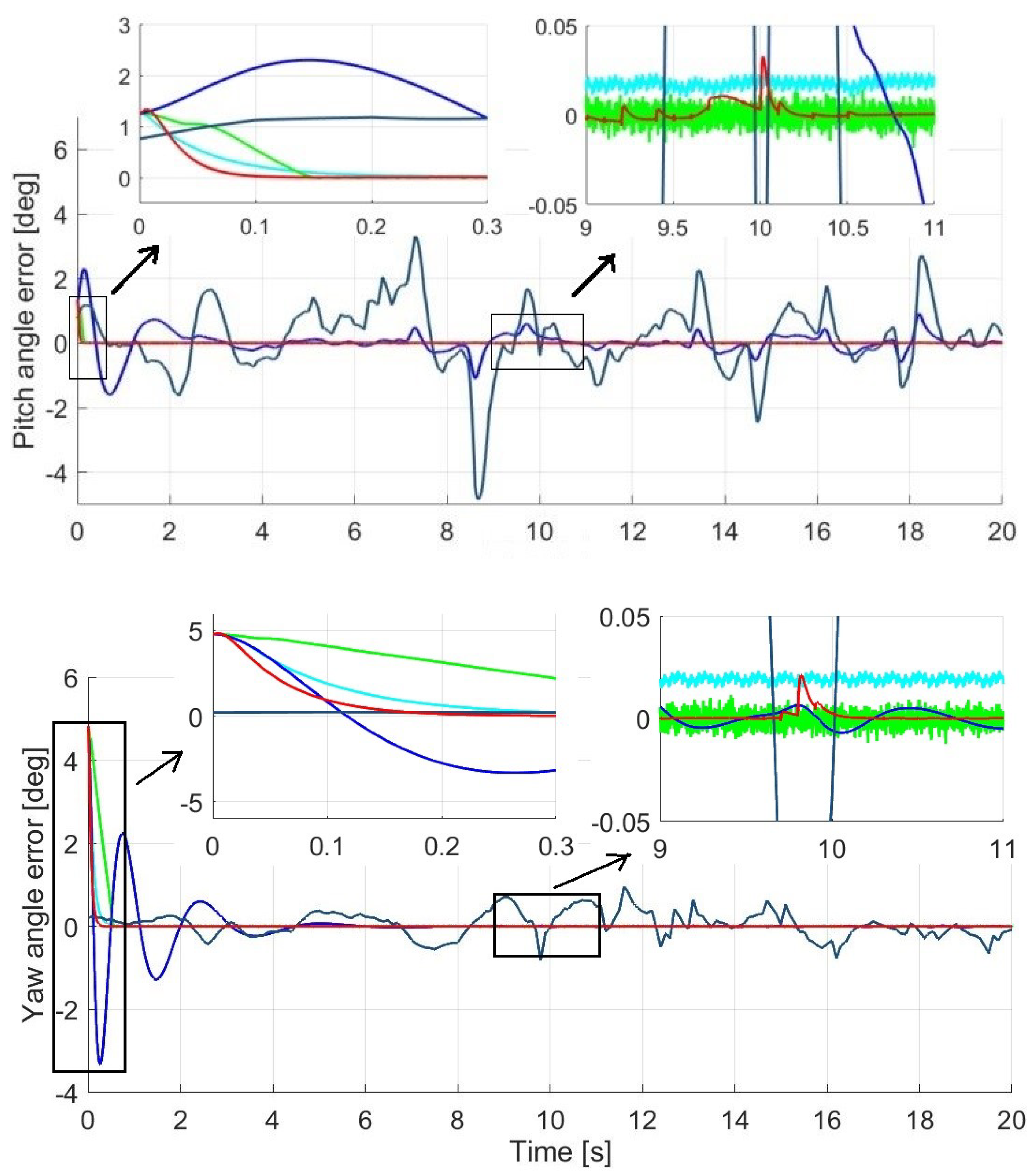
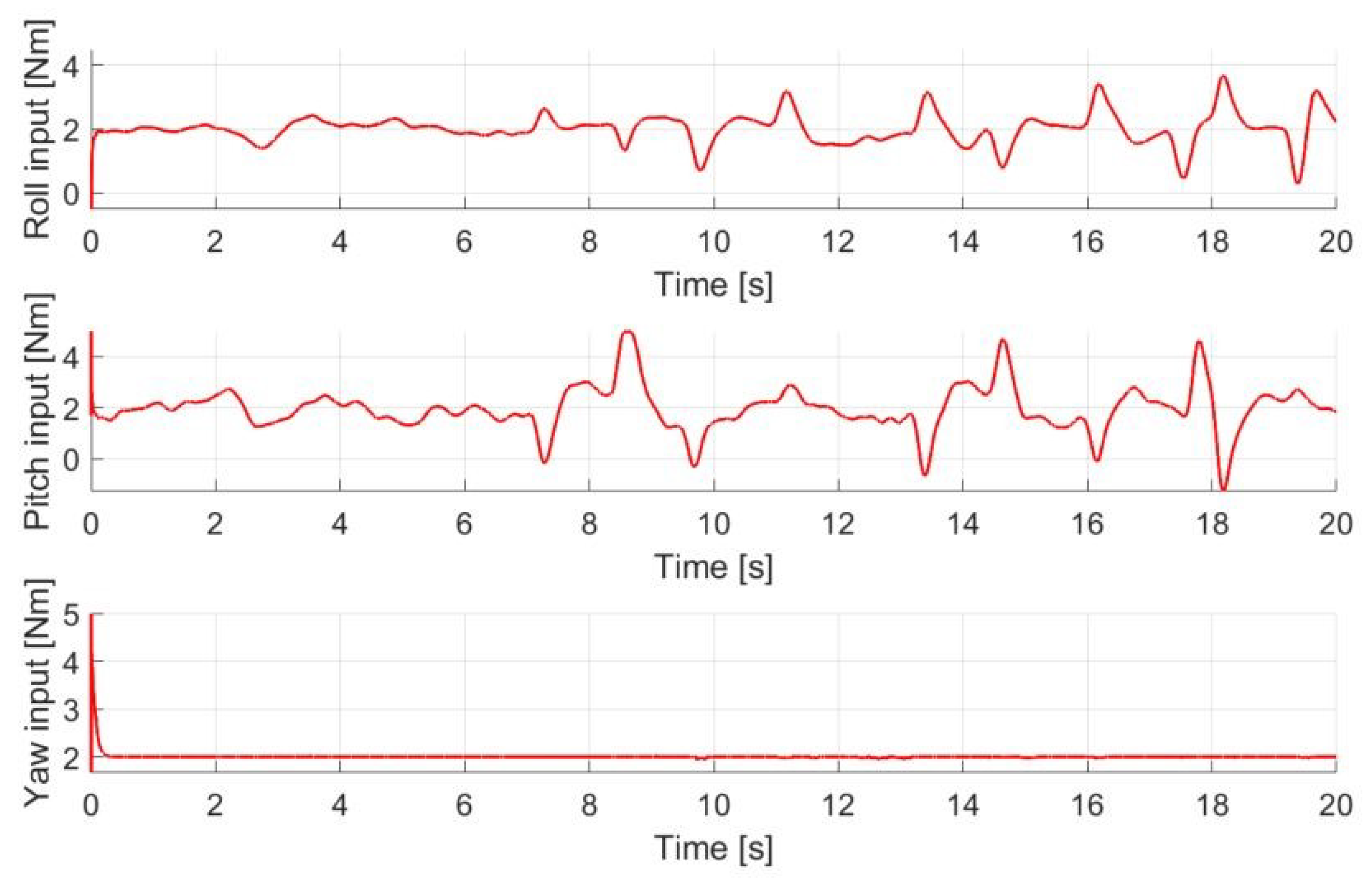
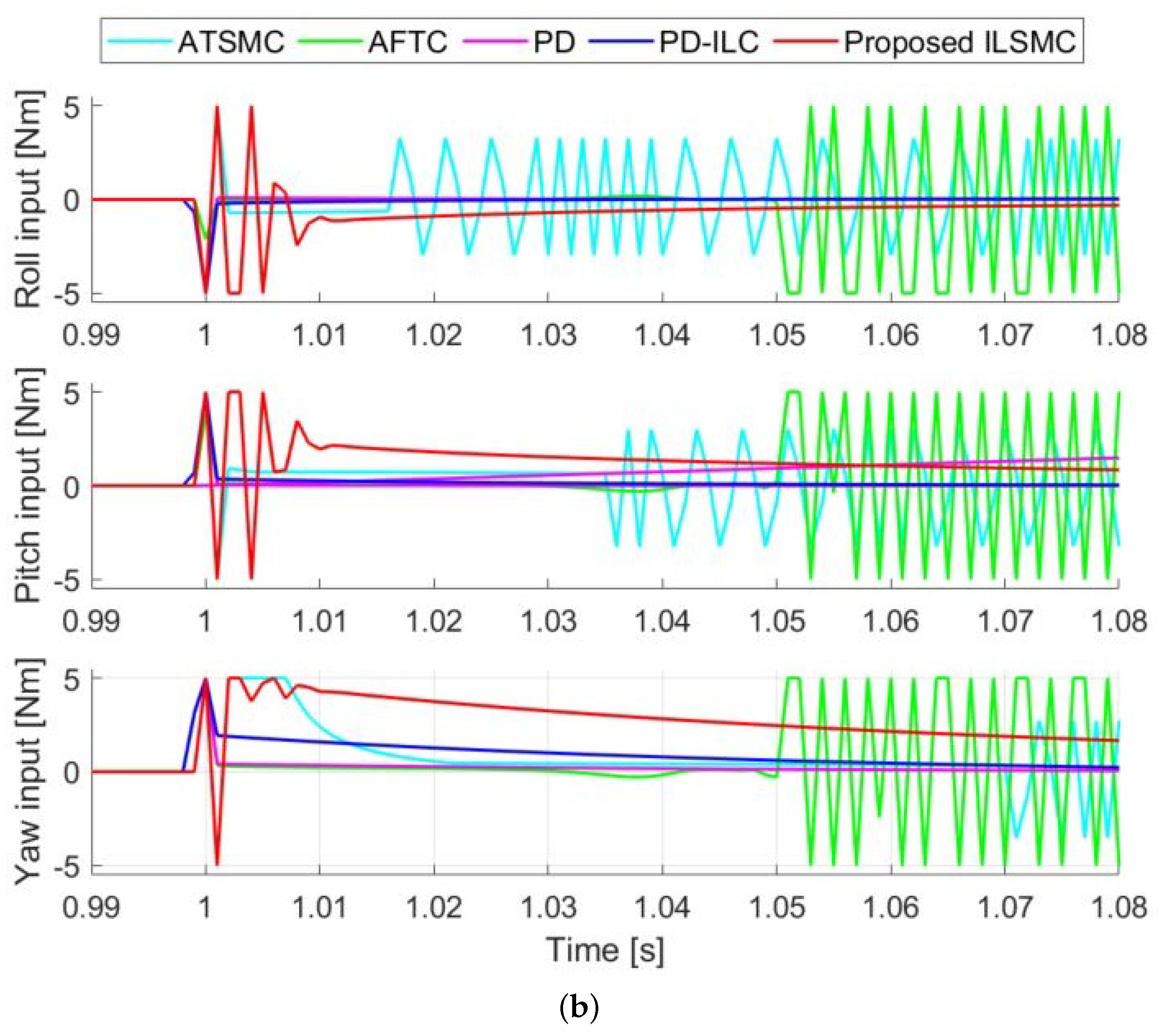
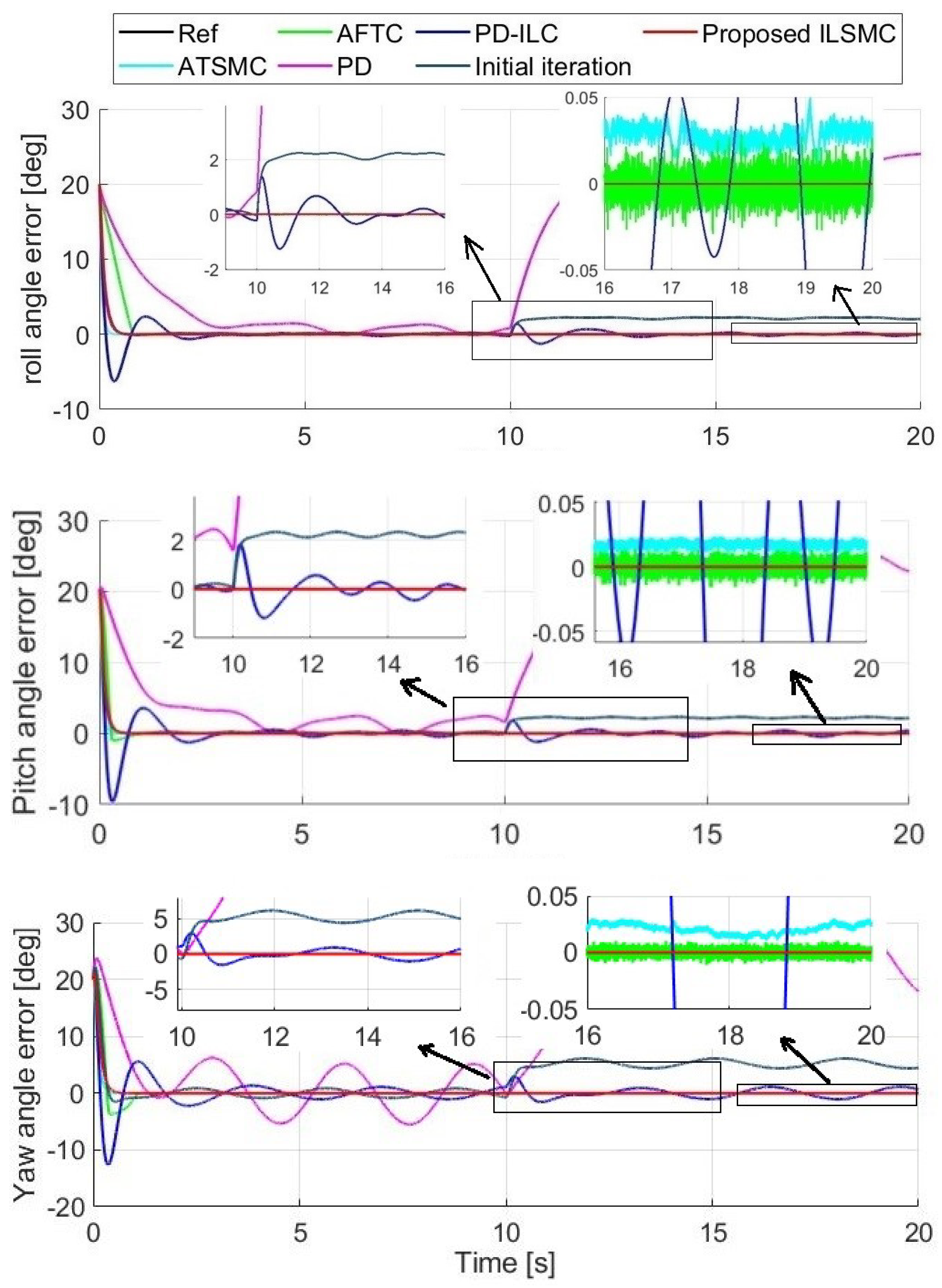
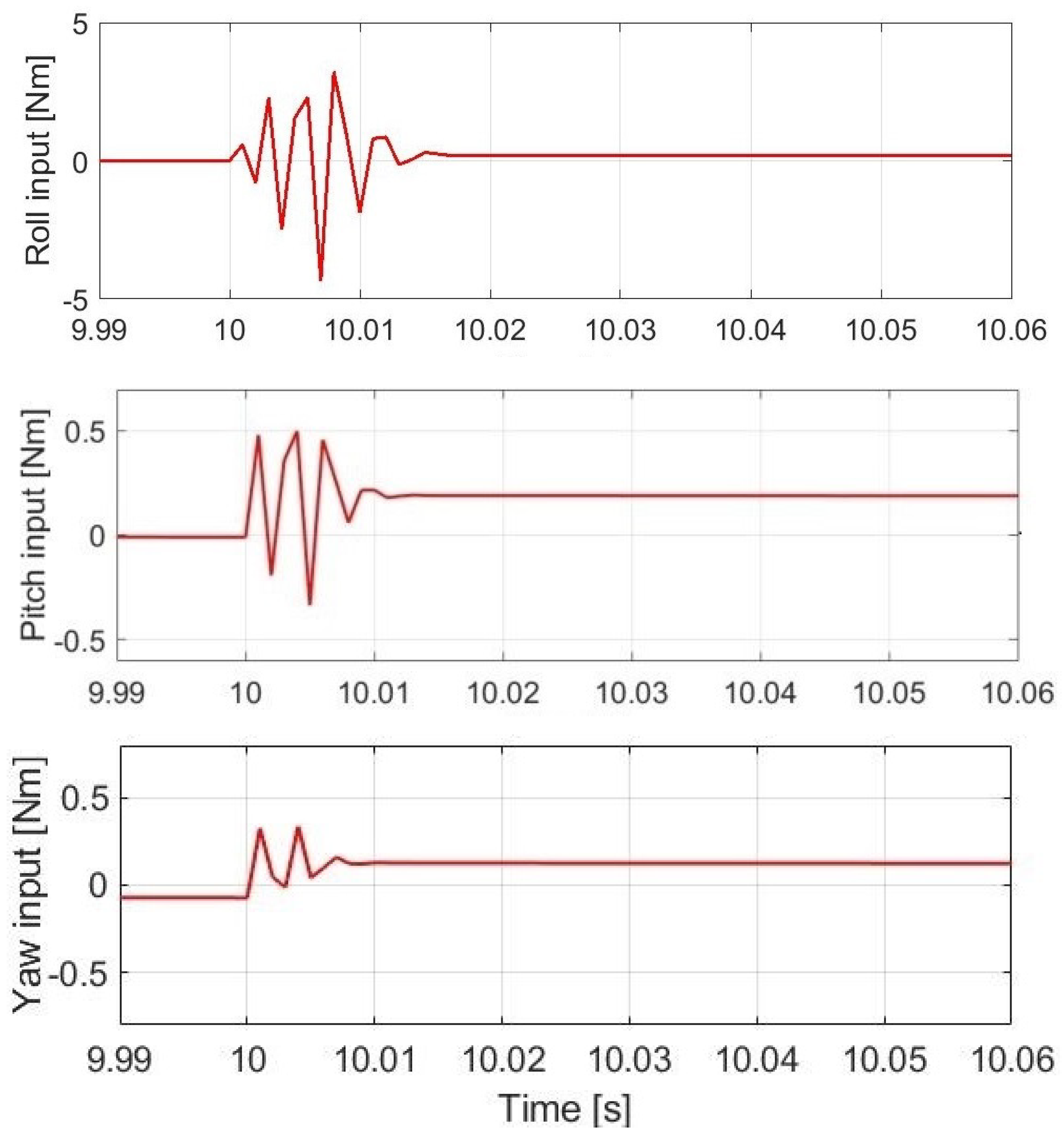
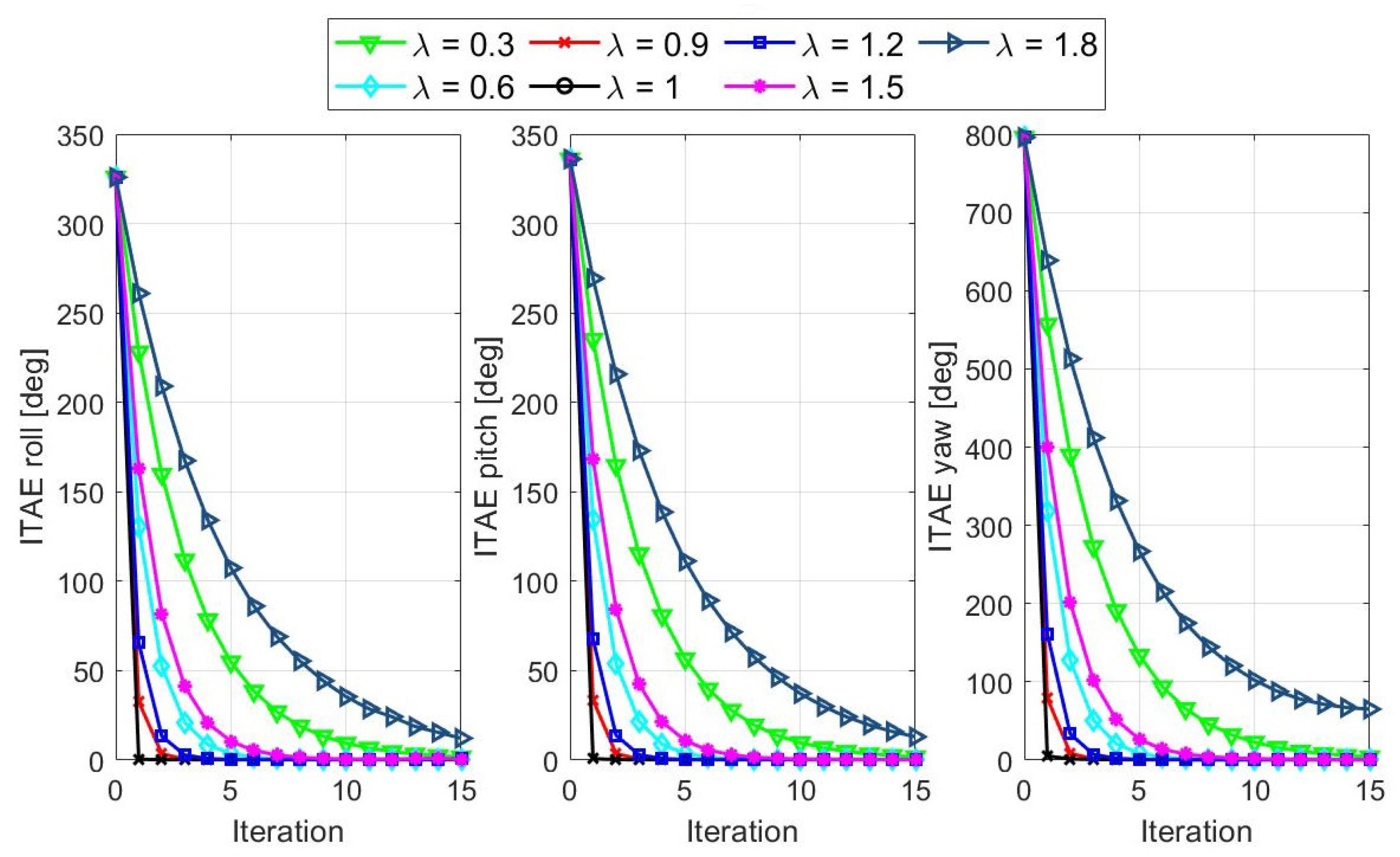
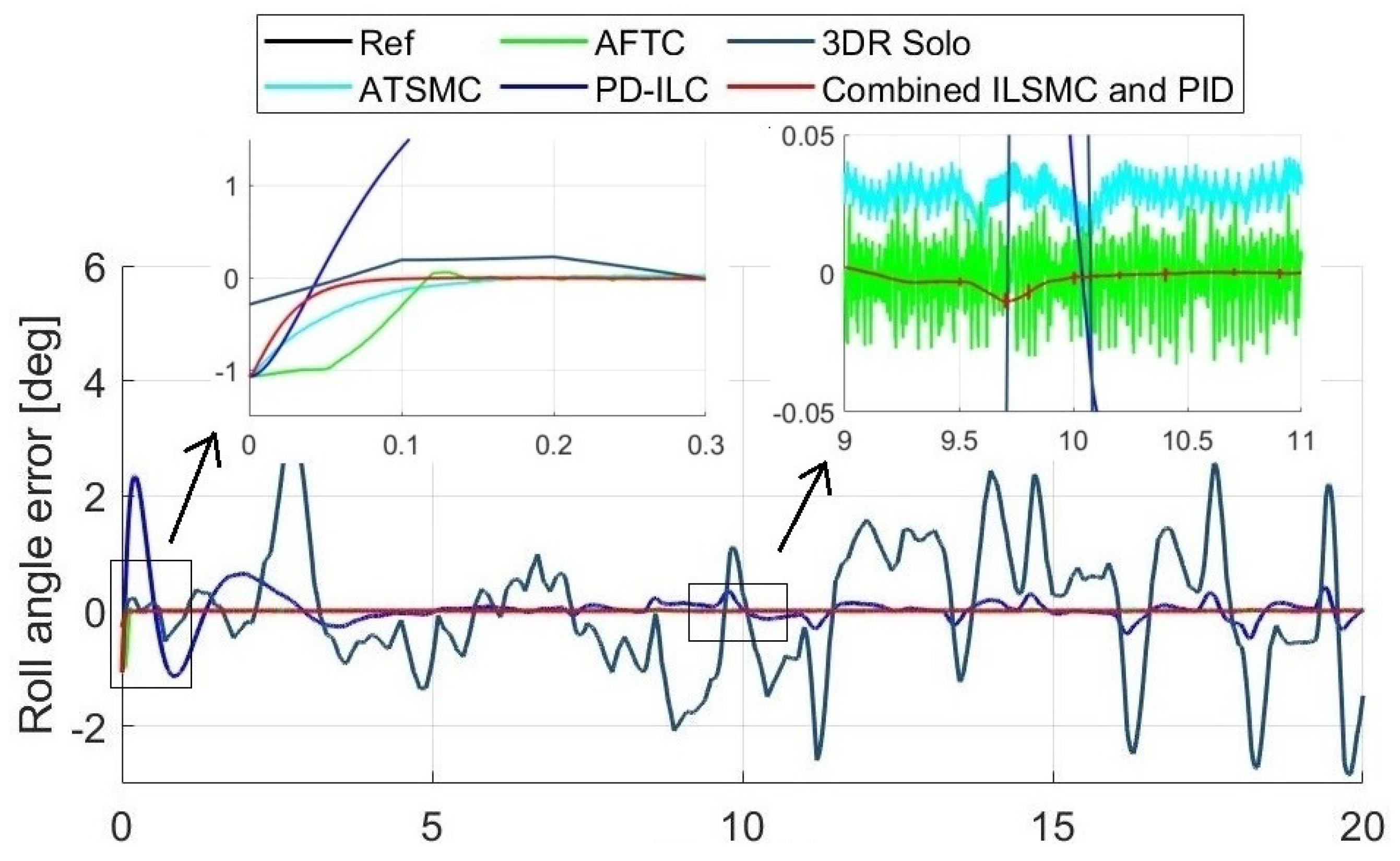
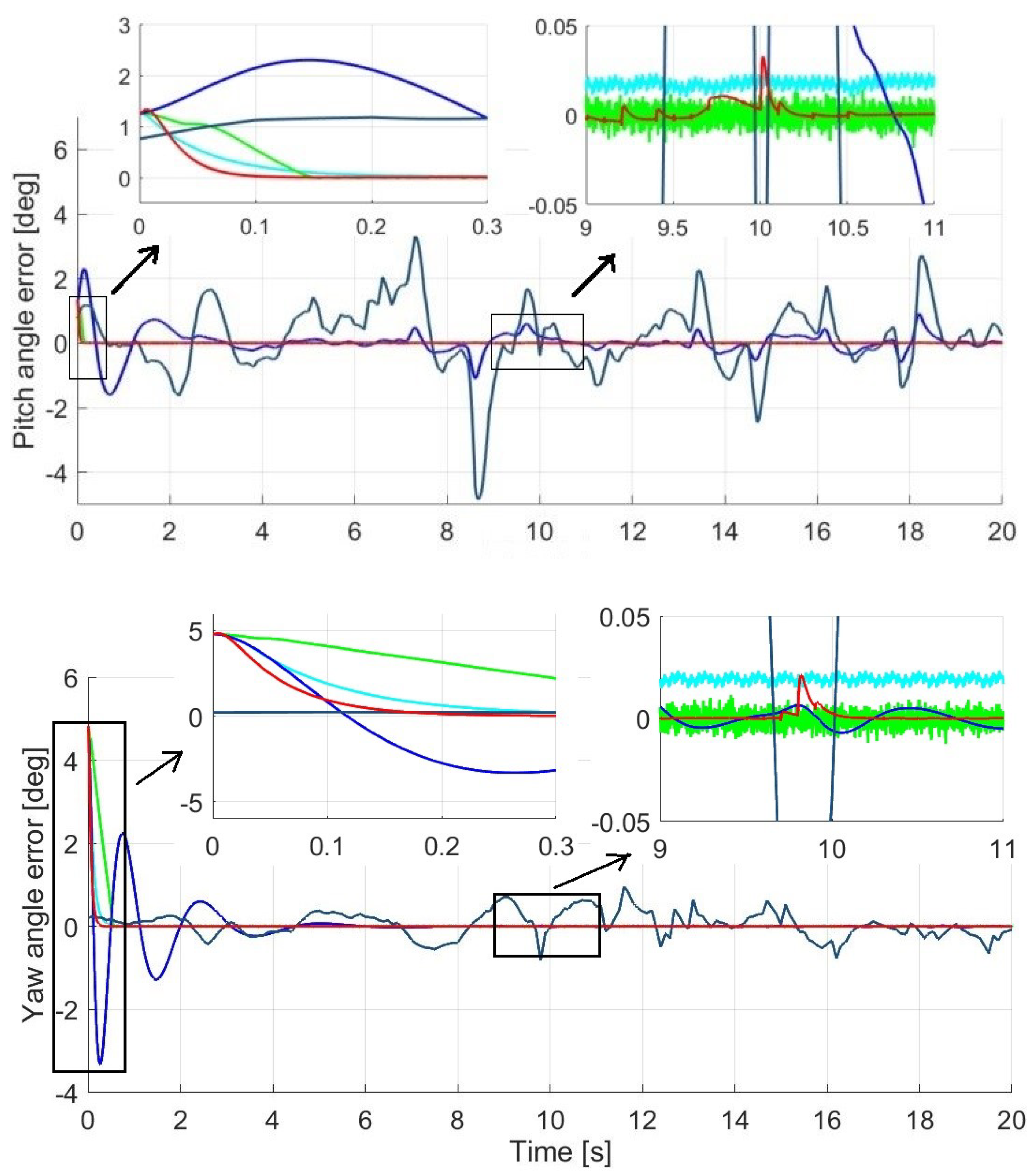
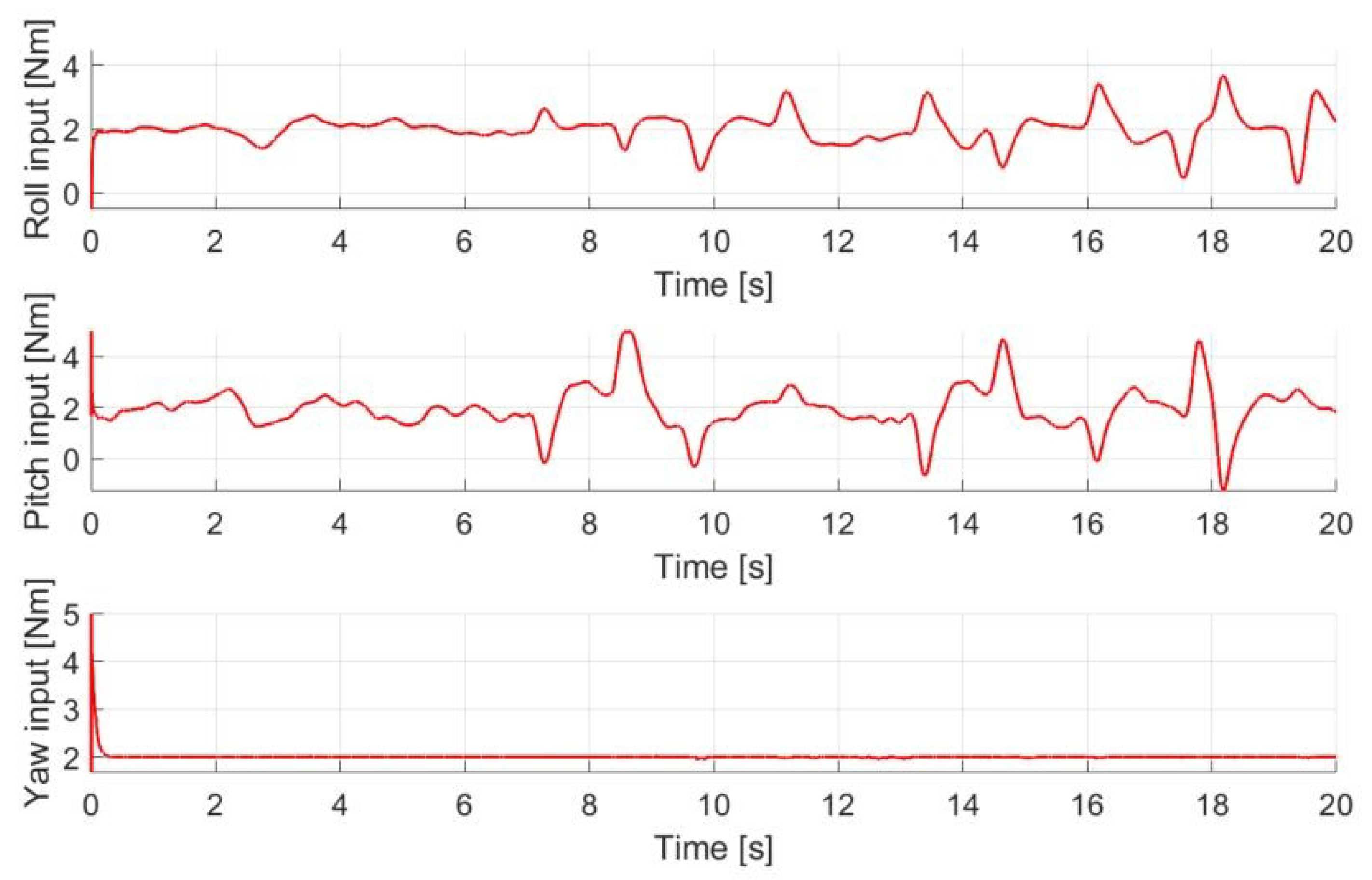
5.2. Trajectory Tracking Performance under Disturbances and Uncertainties
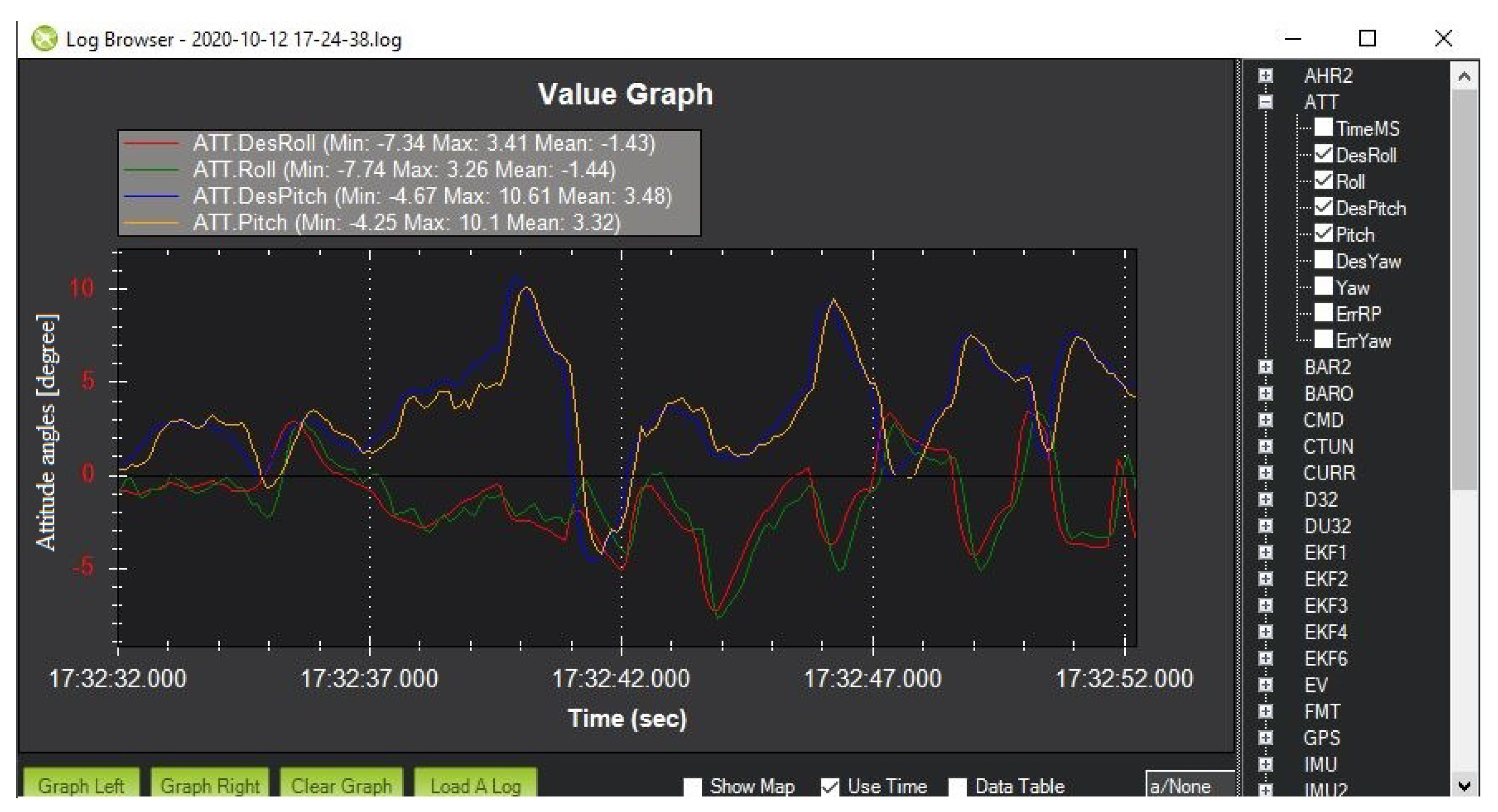
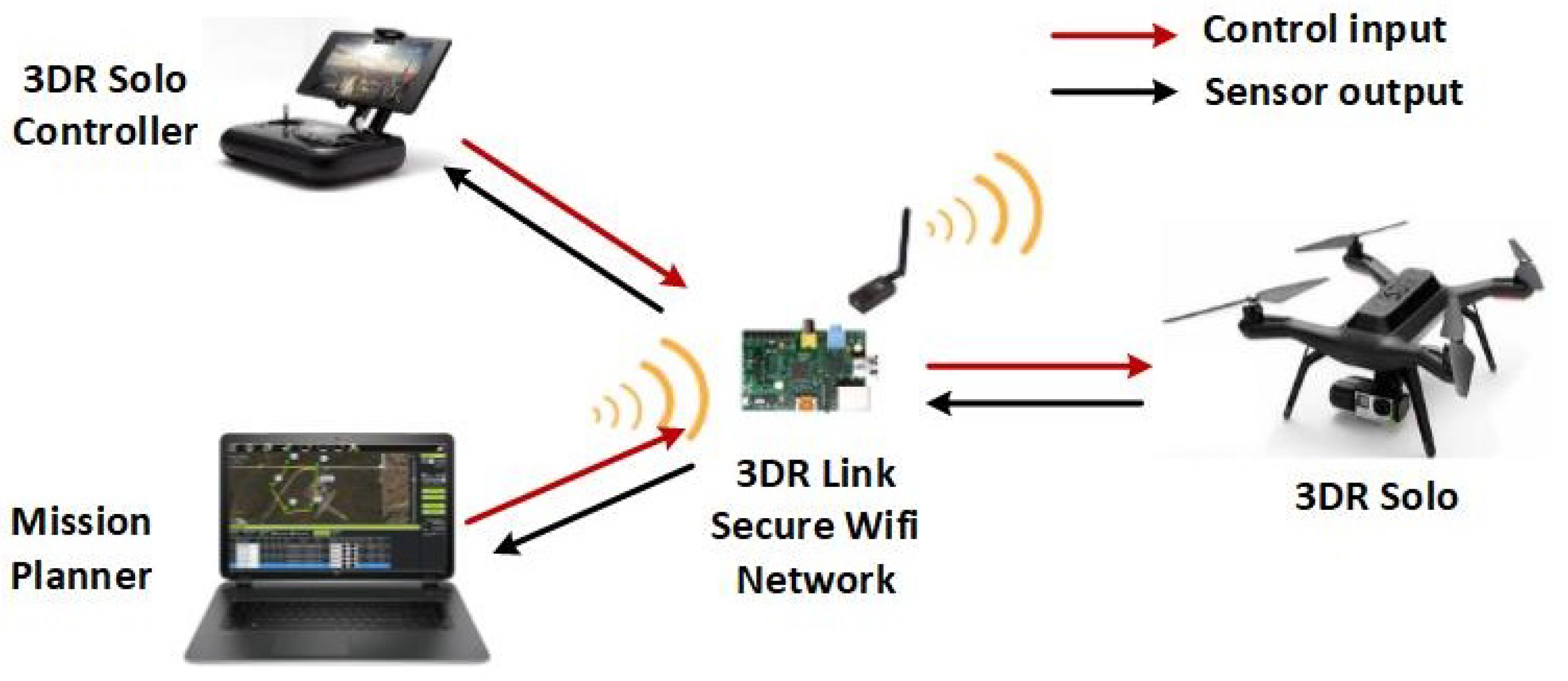
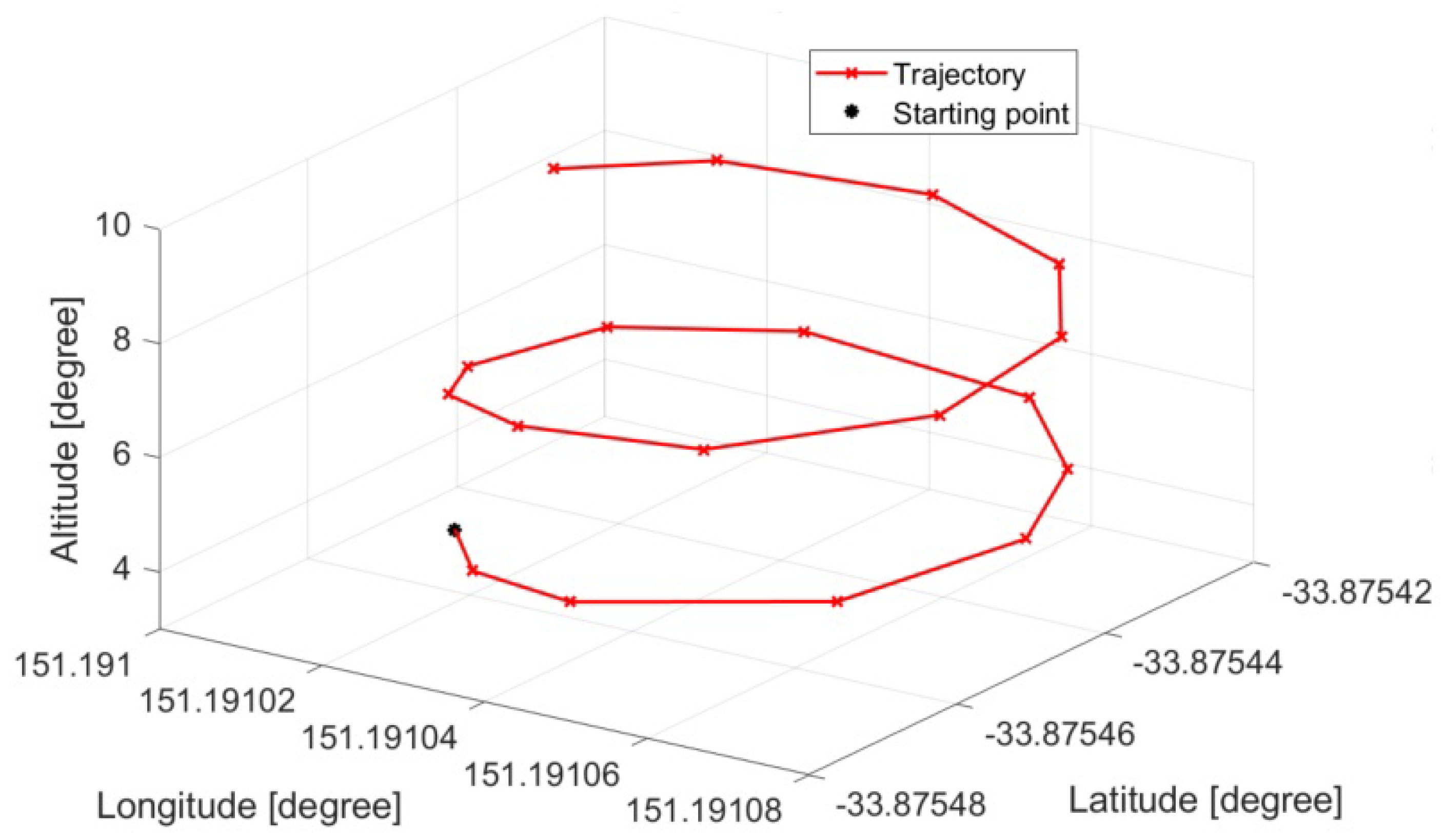
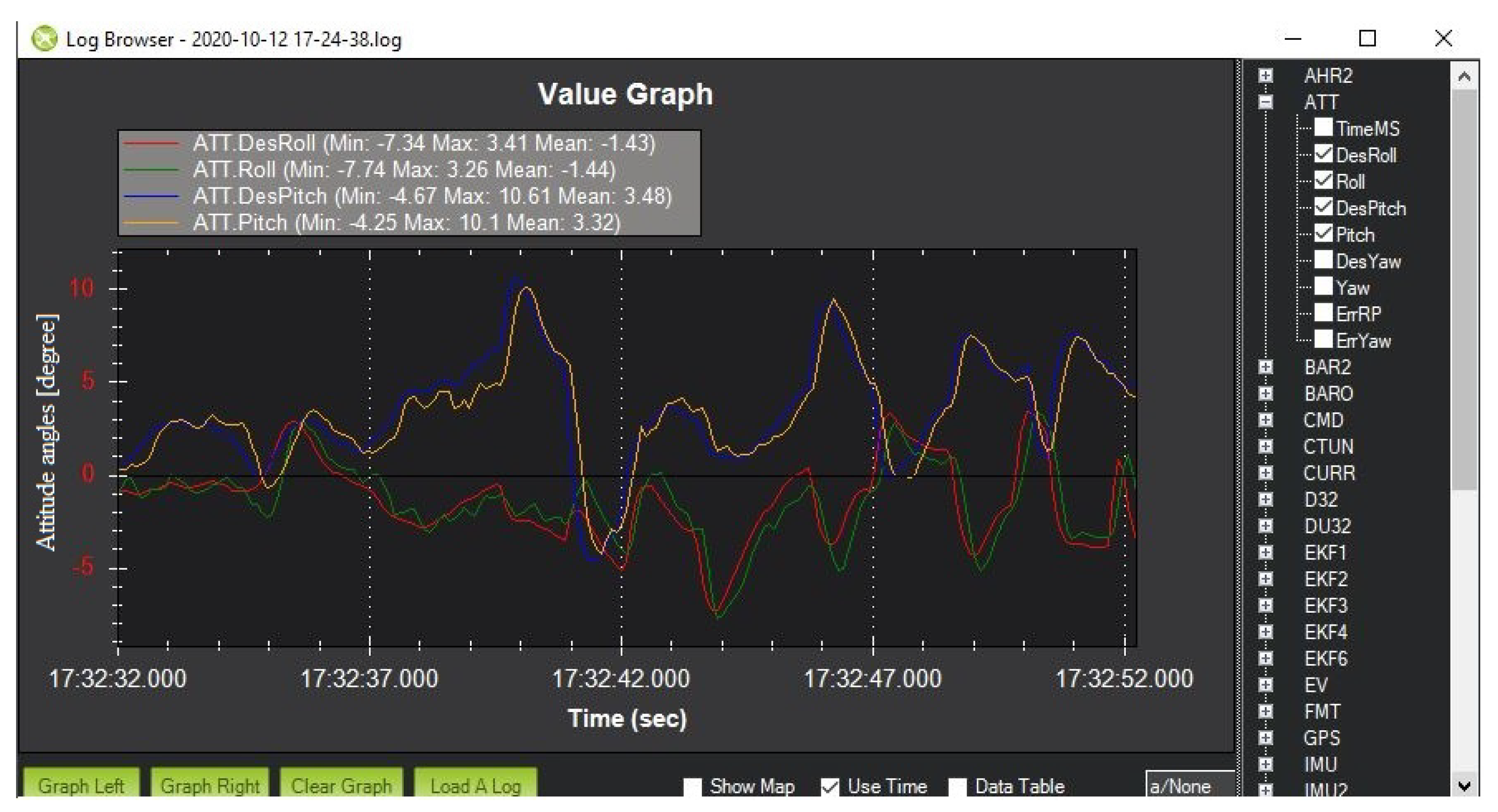
6. Experimental Validation
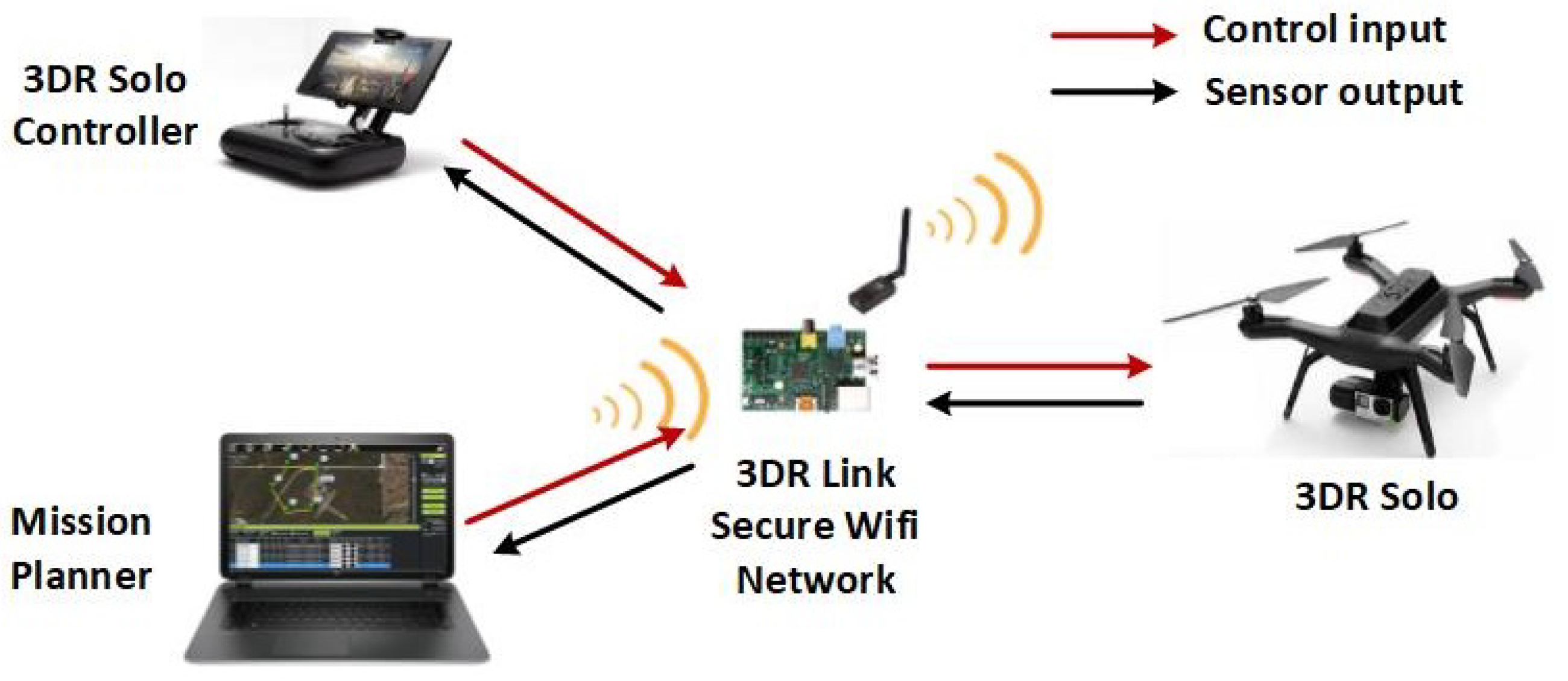
6.1. Experimental Setup
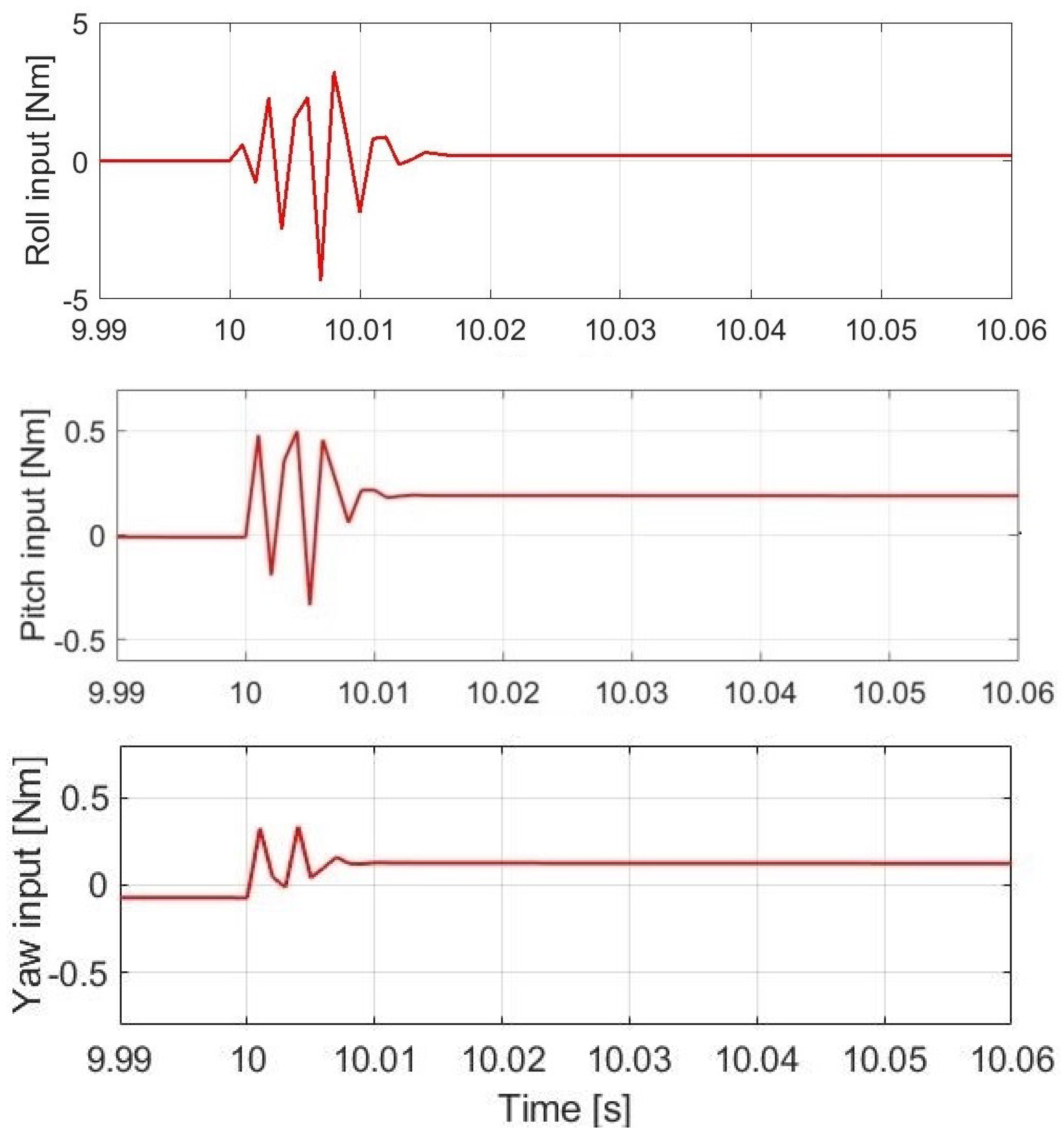
6.2. Real-Time Data Validation Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SMC | Sliding mode control |
| ILC | Iterative learning control |
| ILSMC | Iterative learning sliding mode control |
| UAV | Unmanned aerial vehicle |
| PID | Proportional–integral–derivative |
| FL | Feedback linearization |
| CoG | Center of gravity |
| TPI | Tracking performance index |
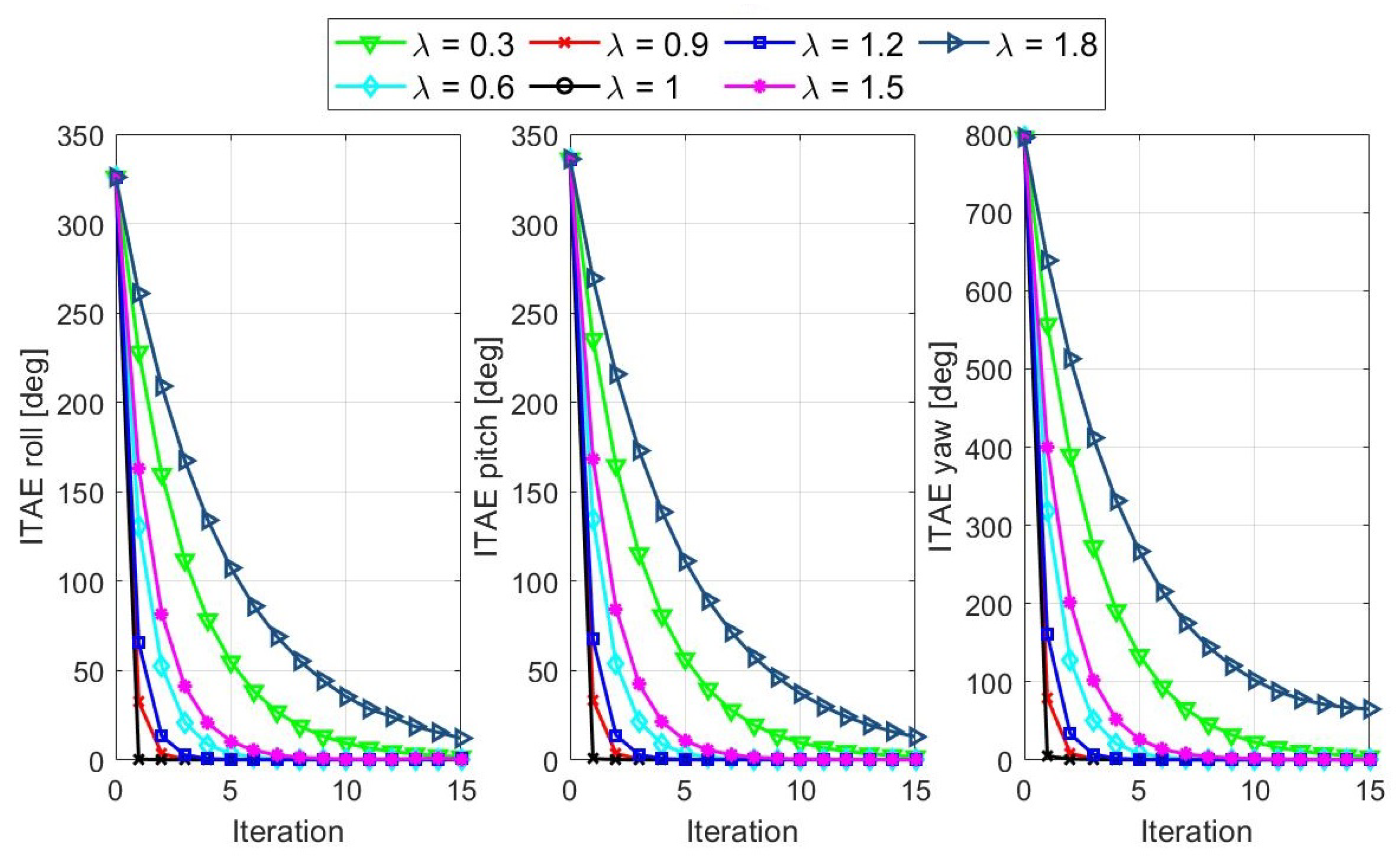
| ITAE | Integral time absolute error |
| ATSMC | Adaptive twisting sliding mode control |
| AFTC | Finite-time control scheme. |
References
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2012, 28, 90–100. [Google Scholar] [CrossRef] [Green Version]
- Grisetti, G.; Stachniss, C.; Burgard, W. Non-linear constraint network optimization for efficient map learning. IEEE Trans. Intell. Transp. Syst. 2009, 10, 428–439. [Google Scholar] [CrossRef] [Green Version]
- Flint, M.; Polycarpou, M.; Fernandez-Gaucherand, E. Cooperative control for multiple autonomous UAV’s searching for targets. In Proceedings of the 41st lEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002. [Google Scholar]
- Brown, A.; Anderson, D. Trajectory optimization for high-altitude long endurance UAV maritime radar surveillance. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2406–2421. [Google Scholar] [CrossRef] [Green Version]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Choi, Y.C.; Ahn, H.S. Nonlinear control of quadrotor for point tracking: Actual implementation and experimental tests. IEEE/ASME Trans. Mechatron. 2015, 20, 1179–1192. [Google Scholar] [CrossRef]
- Park, J.; Kim, Y.; Kim, S. Landing site searching and selection algorithm development using vision system and its application to quadrotor. IEEE Trans. Control Syst. Technol. 2015, 23, 488–503. [Google Scholar] [CrossRef]
- Prasenjit, M.; Steven, W. Direct adaptive feedback linearization for quadrotor control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; American Institute of Aeronautics and Astronautics: Minneapolis, MN, USA, 2012. [Google Scholar]
- L’afflitto, A.; Anderson, R.B.; Mohammadi, K. An introduction to nonlinear robust control for unmanned quadrotor aircraft. IEEE Control Syst. Mag. 2018, 38, 102–121. [Google Scholar] [CrossRef]
- Qingtong, W.; Honglin, W.; Qingxian, W.; Mou, C. Backstepping-based attitude control for a quadrotor UAV using nonlinear disturbance observer. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Chincholkar, S.H.; Jiang, W.; Chan, C.-Y. Continuous nonsingular terminal sliding mode control of DC–DC boost converters subject to time-varying disturbances. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 92–96. [Google Scholar] [CrossRef]
- Ma, H.; Xiong, Z. Sliding mode control for uncertain discrete-time systems using an adaptive reaching law. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 722–726. [Google Scholar] [CrossRef]
- Ali, S.U.; Samar, R.; Shah, M.Z.; Bhatti, A.I.; Munawar, K.; Al-Sggaf, U.M. Lateral guidance and control of UAVs using second-order sliding modes. Aerosp. Sci. Technol. 2016, 49, 88–100. [Google Scholar] [CrossRef]
- Sankaranarayanan, V.; Mahindrakar, A.D. Control of a class of underactuated mechanical systems using sliding modes. IEEE Trans. Robot. 2009, 25, 459–467. [Google Scholar] [CrossRef]
- Tian, B.; Yin, L.; Wang, H. Finite-time reentry attitude control based on adaptive multivariable disturbance compensation. IEEE Trans. Ind. Electron. 2015, 62, 5889–5898. [Google Scholar] [CrossRef]
- Qi, Y.; Zhang, S.; Jiang, F.; Zhou, H.; Tao, D.; Li, X. Siamese local and global networks for robust face tracking. IEEE Trans. Image Process. 2020, 29, 9152–9164. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Feng, Y.; Xue, C.; Han, F. Deep convolutional neural network based fractional-order terminal sliding-mode control for robotic manipulators. Neurocomputing 2020, 416, 143–151. [Google Scholar] [CrossRef]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Control Syst. Mag. 2006, 26, 96–114. [Google Scholar]
- Yu, M.; Li, C. Robust Adaptive Iterative Learning Control for Discrete-Time Nonlinear Systems with Time-Iteration-Varying Parameters. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1737–1745. [Google Scholar] [CrossRef]
- Uchiyama, M. Formation of high speed motion pattern of mechanical arm by trial. Trans. Soc. Instrum. Control. Eng. 1978, 14, 706–712. [Google Scholar] [CrossRef] [Green Version]
- Arimoto, S.; Kawamura, S.; Miyazaki, F. Iterative learning control for robot systems. In Proceedings of the IECON, Tokyo, Japan, 22–26 October 1984; pp. 393–398. [Google Scholar]
- Moore, K.L. Iterative learning control for deterministic systems. In Advances in Industial Control; Springer: London, UK, 1993. [Google Scholar]
- Tayebi, A.; Abdul, S.; Zaremba, M.B.; Ye, Y. Robust iterative learning control design: Application to a robot manipulator. IEEE/ASME Trans. Mechatron. 2008, 13, 608–613. [Google Scholar] [CrossRef] [Green Version]
- Mezghani, M.; Roux, G.; Cabassud, M.; Lann, M.V.L.; Dahhou, B.; Casamatta, G. Application of iterative learning control to an exothermic semibatch chemical reactor. IEEE Trans. Control Syst. Technol. 2002, 10, 822–834. [Google Scholar] [CrossRef]
- Zhu, Q.; Song, F.; Xu, J.; Liu, Y. An internal model based iterative learning control for wafer scanner systems. IEEE/ASME Trans. Mechatron. 2019, 24, 2073–2084. [Google Scholar] [CrossRef]
- Nikooienejad, N.; Maroufi, M.; Moheimani, R. Iterative learning control for video-rate atomic force microscopy. IEEE/ASME Trans. Mechatron. 2021, 26, 2127–2138. [Google Scholar] [CrossRef]
- Madani, T.; Benallegue, A. Adaptive control via backstepping technique and neural networks of a quadrotor helicopter. IFAC Proc. Vol. 2008, 41, 6513–6518. [Google Scholar] [CrossRef] [Green Version]
- Hoang, V.T.; Phung, M.D.; Ha, Q.P. Adaptive twisting sliding mode control for quadrotor unmanned aerial vehicles. In Proceedings of the 2017 Asian Control Conference (ASCC 2017), Gold Coast, Australia, 17–20 December 2017; pp. 671–676. [Google Scholar]
- Tian, B.; Lu, H.; Zuo, Z.; Zong, Q. Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons. IEEE Trans. Ind. Electron. 2019, 66, 9428–9438. [Google Scholar] [CrossRef]
- He, X.; Guo, D.; Leang, K.K. Repetitive control design and implementation for periodic motion tracking in aerial robots. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 5101–5108. [Google Scholar]
- Dong, J.; He, B. Novel fuzzy PID-type iterative learning control for quadrotor UAV. Sensors 2019, 19, 24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adlakha, R.; Zheng, M. An Optimization-Based Iterative Learning Control Design Method for UAV’s Trajectory Tracking. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1353–1359. [Google Scholar]
- Chen, Y.; Moore, K.L. Harnessing the nonrepetitiveness in iterative learning control. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 3, pp. 3350–3355. [Google Scholar]
- Sarpturk, S.Z.; Istefanopulos, Y.; Kaynak, O. On the stability of discrete-time sliding mode control systems. IEEE Trans. Autom. Control 1987, 32, 930–932. [Google Scholar] [CrossRef]
- Norrlöf, M.; Gunnarsson, S. Time and frequency domain convergence properties in iterative learning control. Int. J. Control 2002, 75, 1114–1126. [Google Scholar] [CrossRef]
- Guilherme, V.R.; Manuel, G.O.; Francisco, R.R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter. Automatica 2010, 46, 29–39. [Google Scholar]
- Craig, J.J. Introduction to Robotics—Mechanics and Control, 2nd ed.; Addison-Wesley Publishing Company, Inc.: Reading, MA, USA, 1989. [Google Scholar]
- Hoang, V.T.; Phung, M.D.; Dinh, T.H.; Ha, Q.P. System architecture for real-time surface inspection using multiple UAVs. IEEE Sens. J. 2020, 40, 4430–4441. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | kg | |
| l | m | |
| g | m/s | |
| kg m | ||
| kg m | ||
| kg m |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 50 | 10 | ||
| 50 | |||
| 20 | - | - |
| UAV Angle (degrees) | ATSMC | AFTC | PD | PD-ILC | ILSMC |
|---|---|---|---|---|---|
| Roll | |||||
| Pitch | |||||
| Yaw |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, L.V.; Phung, M.D.; Ha, Q.P. Iterative Learning Sliding Mode Control for UAV Trajectory Tracking. Electronics 2021, 10, 2474. https://doi.org/10.3390/electronics10202474
Nguyen LV, Phung MD, Ha QP. Iterative Learning Sliding Mode Control for UAV Trajectory Tracking. Electronics. 2021; 10(20):2474. https://doi.org/10.3390/electronics10202474
Chicago/Turabian StyleNguyen, Lanh Van, Manh Duong Phung, and Quang Phuc Ha. 2021. "Iterative Learning Sliding Mode Control for UAV Trajectory Tracking" Electronics 10, no. 20: 2474. https://doi.org/10.3390/electronics10202474
APA StyleNguyen, L. V., Phung, M. D., & Ha, Q. P. (2021). Iterative Learning Sliding Mode Control for UAV Trajectory Tracking. Electronics, 10(20), 2474. https://doi.org/10.3390/electronics10202474