
An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer

Abstract
:1. Introduction
2. Equivalent Circuit Model for the Transducer
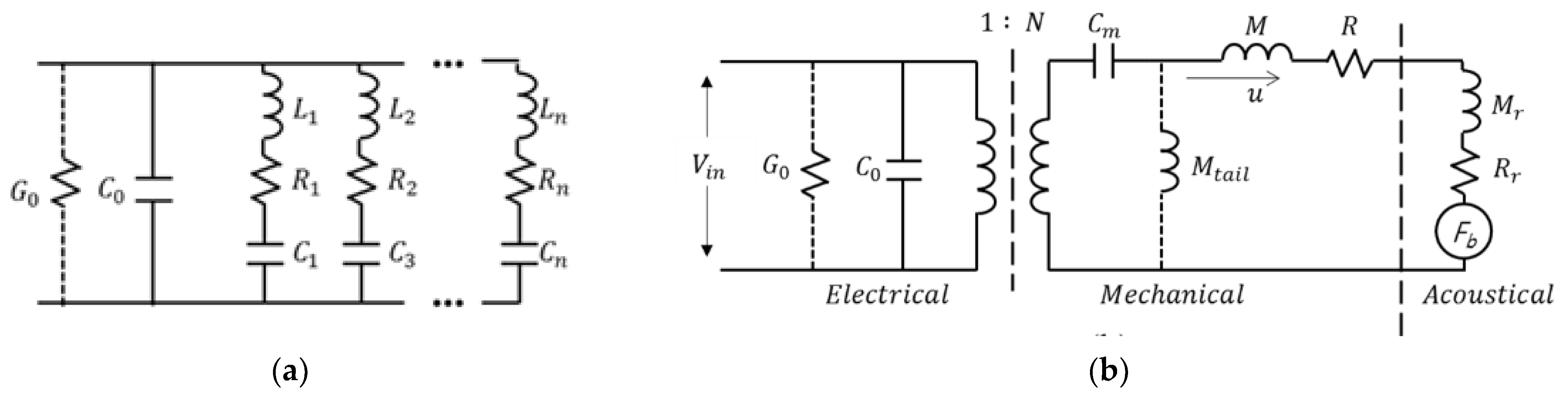
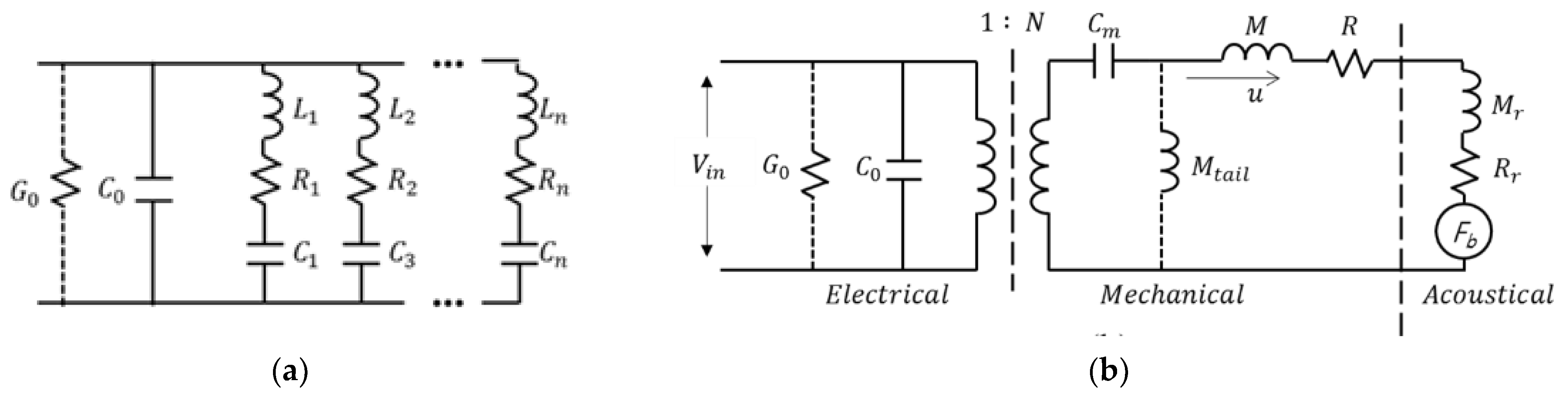
2.1. Basic Circuit Model
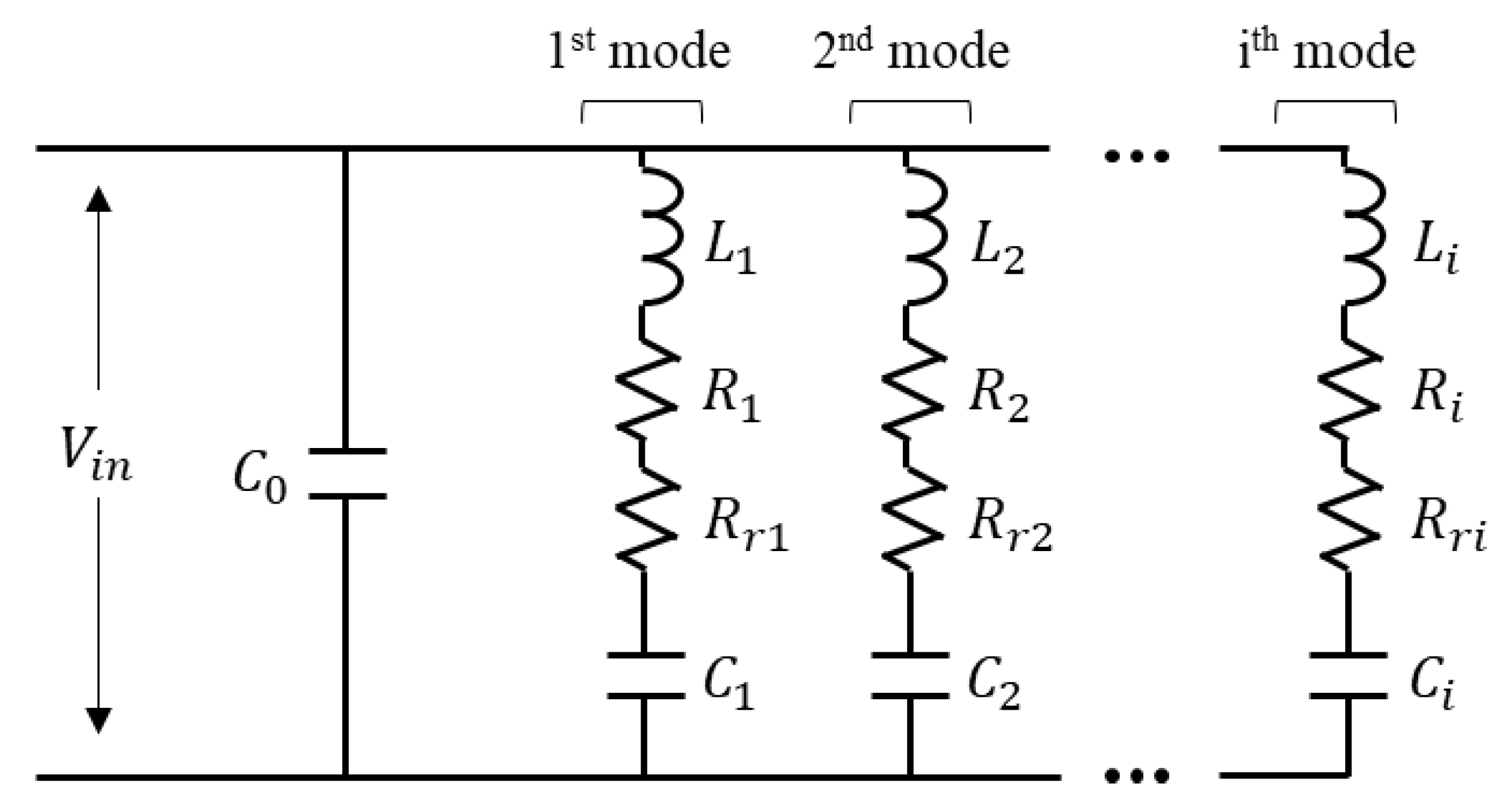
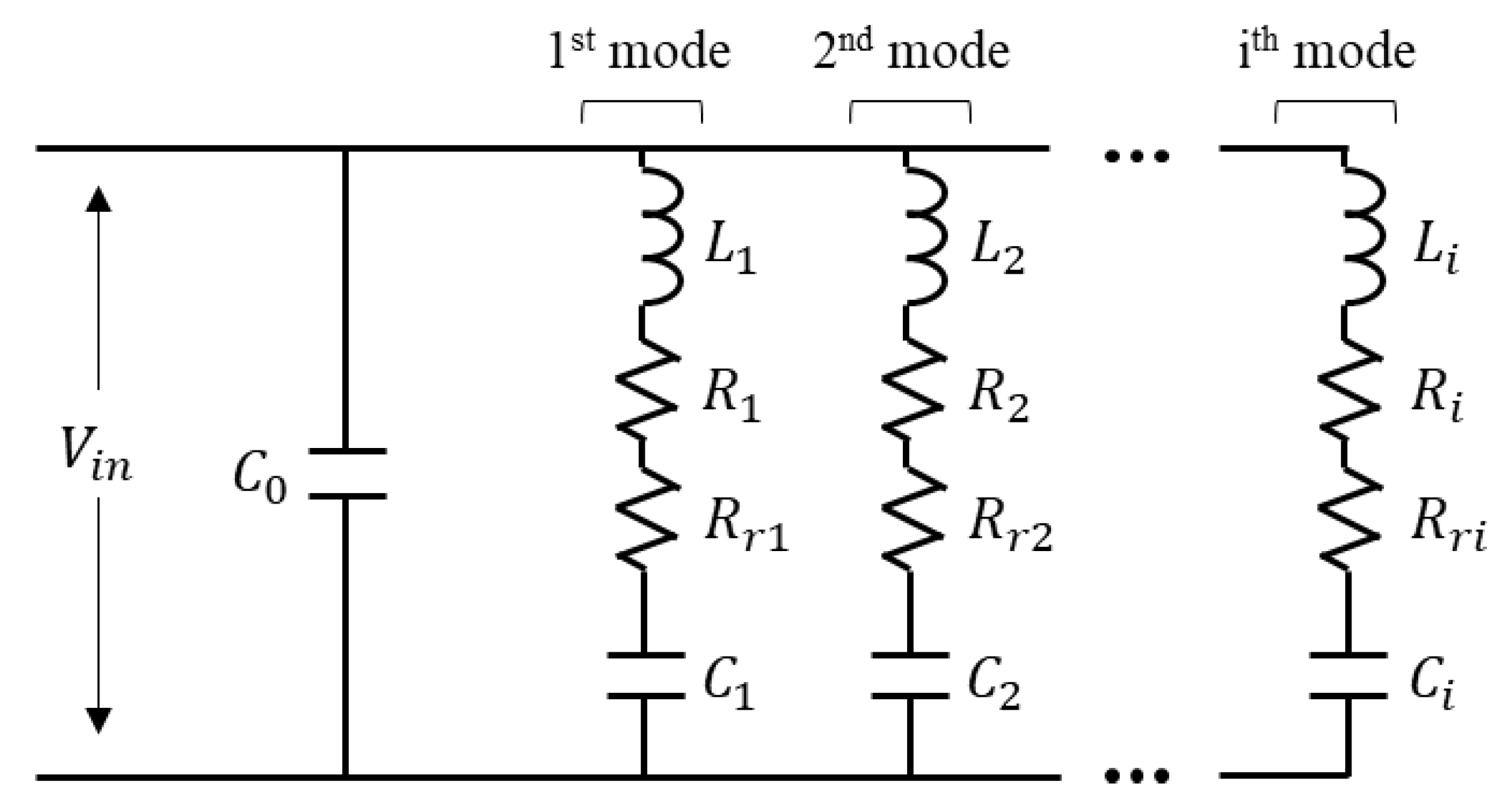
2.2. Proposed Equivalent Circuit
2.3. Transducer Model for Experiment
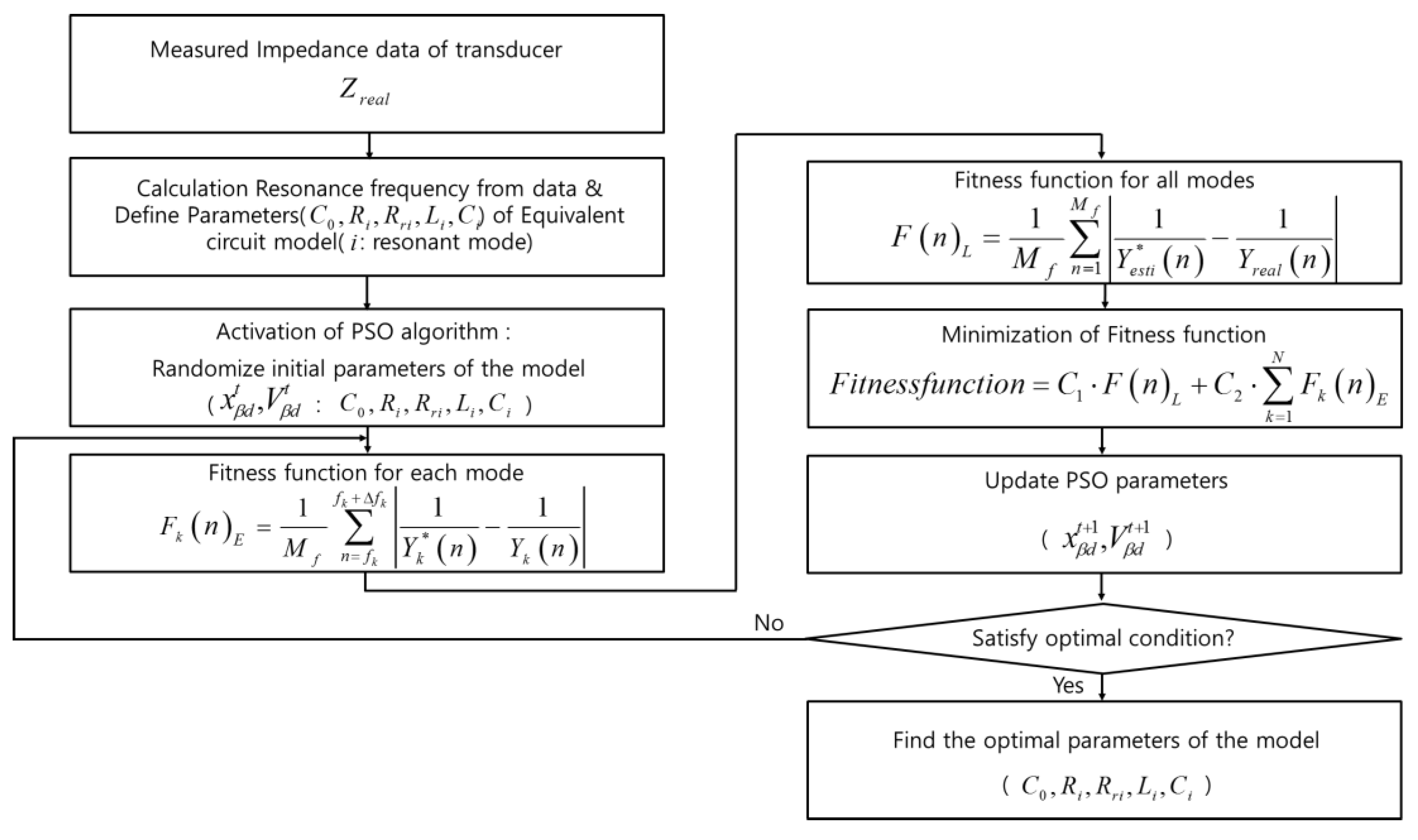
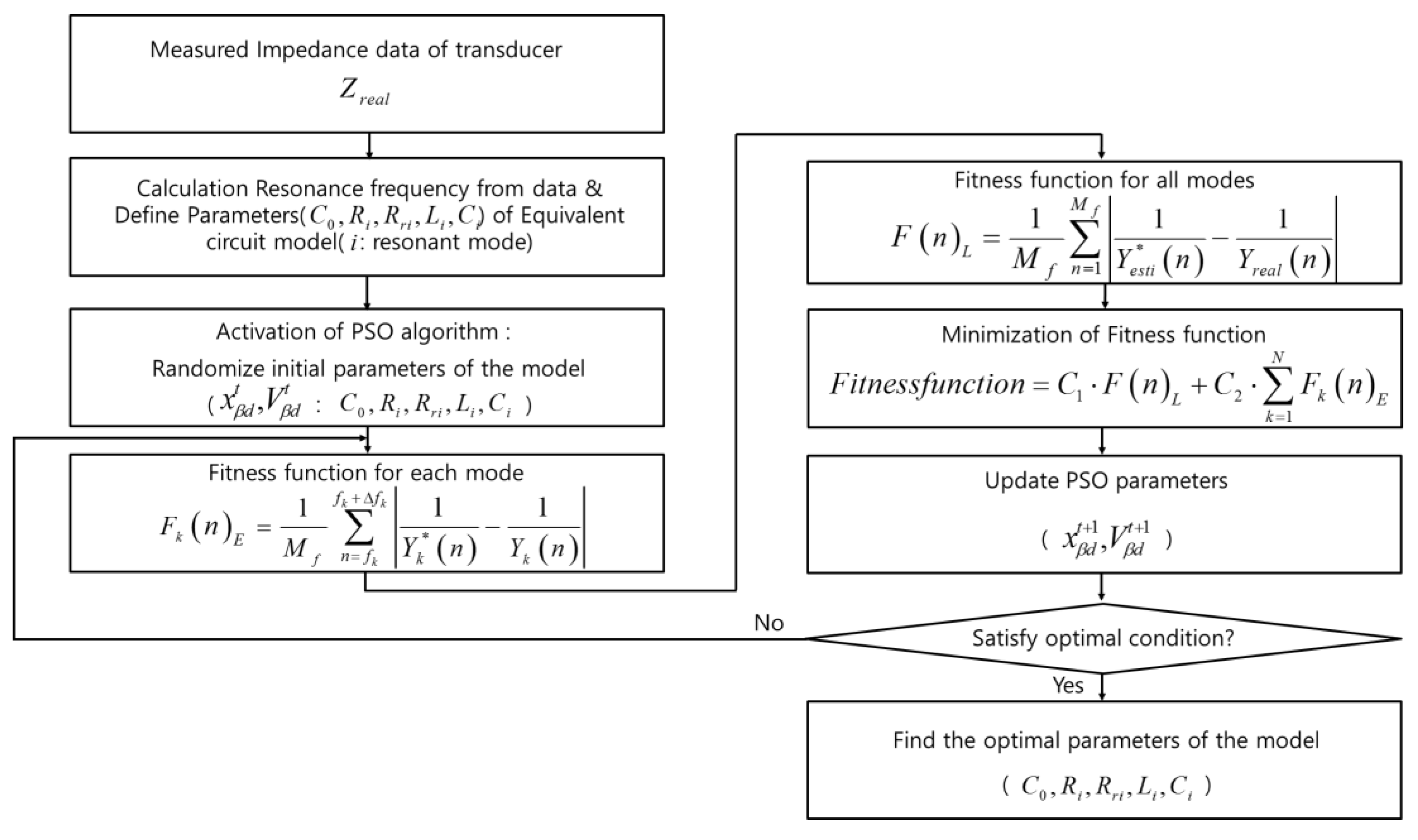
3. Estimation of Equivalent Circuit Model
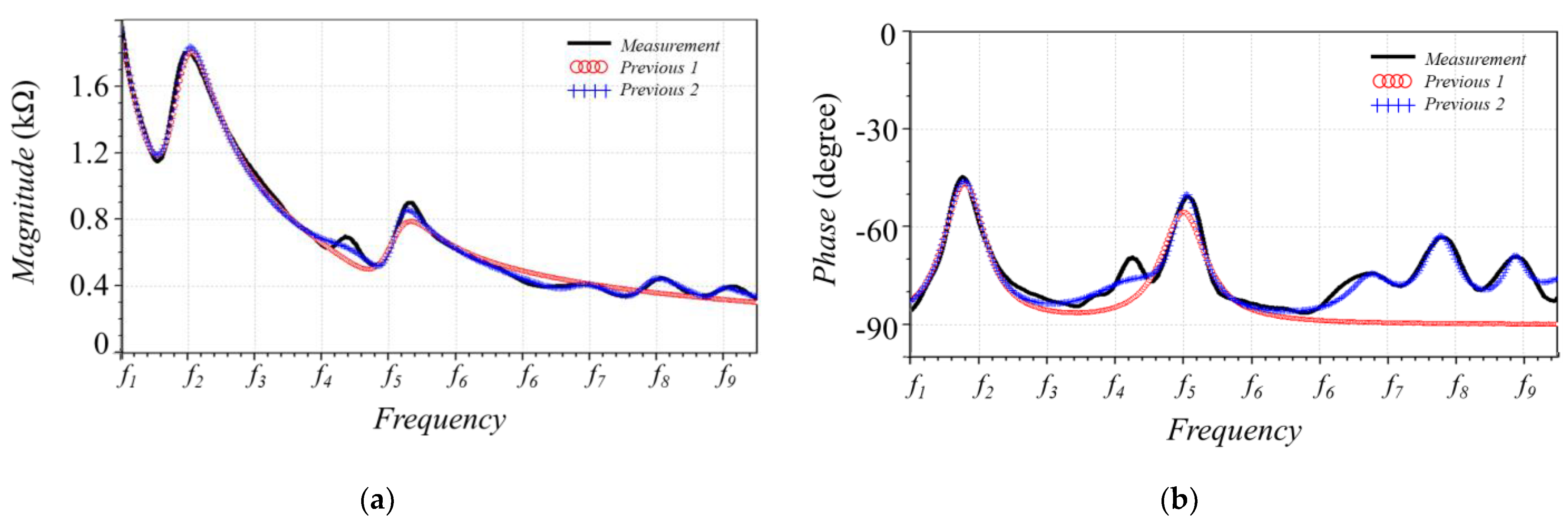
3.1. Previous Method
3.1.1. Previous Fitness Function
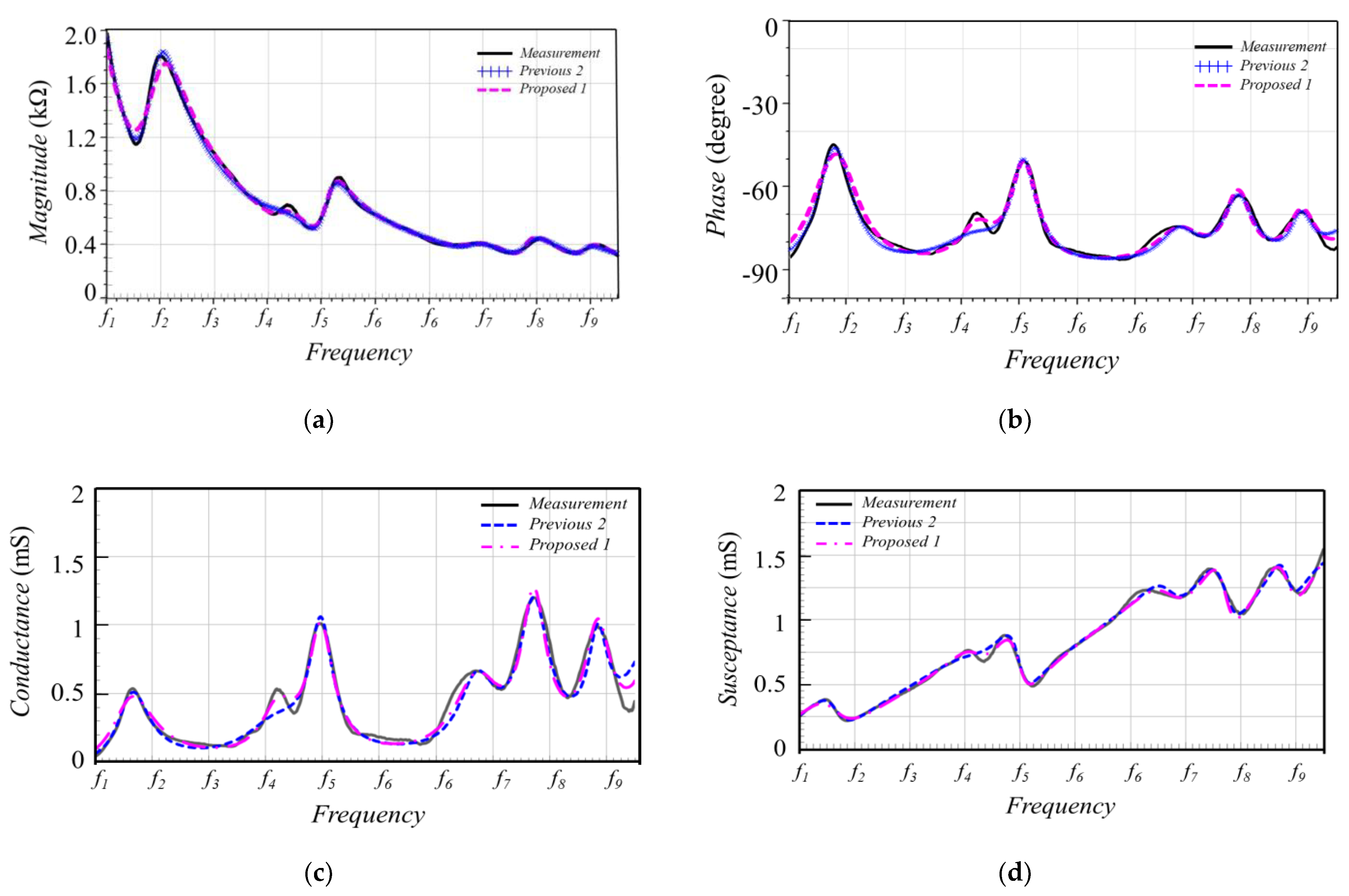
3.1.2. Results
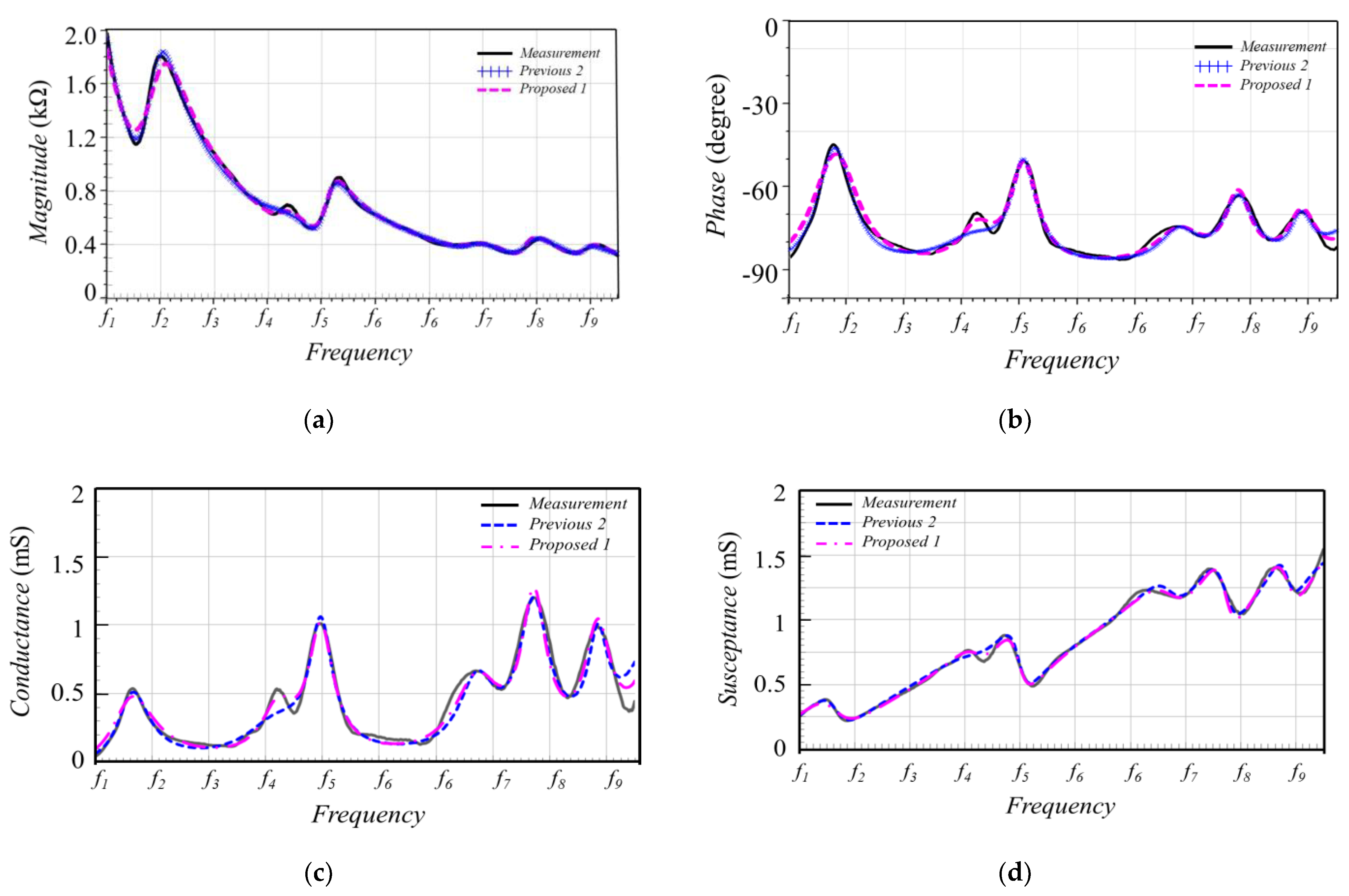
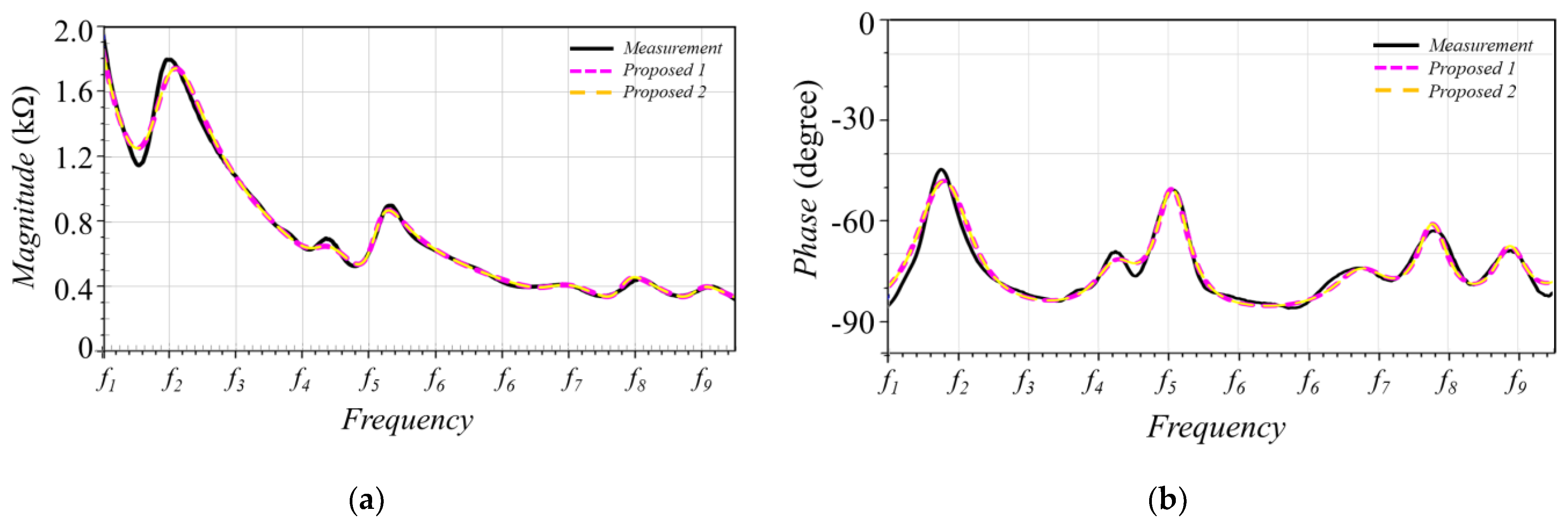
3.2. Proposed Method
3.2.1. Proposed Fitness Function
3.2.2. Separated Mechanical and Acoustic Radiation Resistance
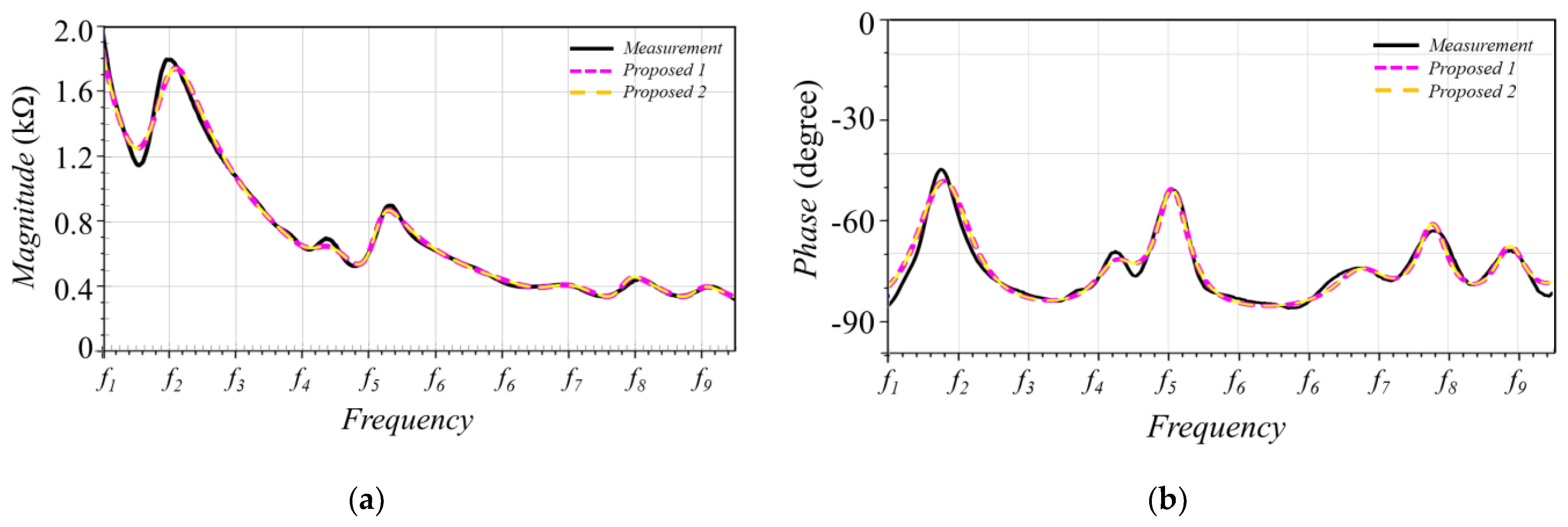
3.2.3. Results
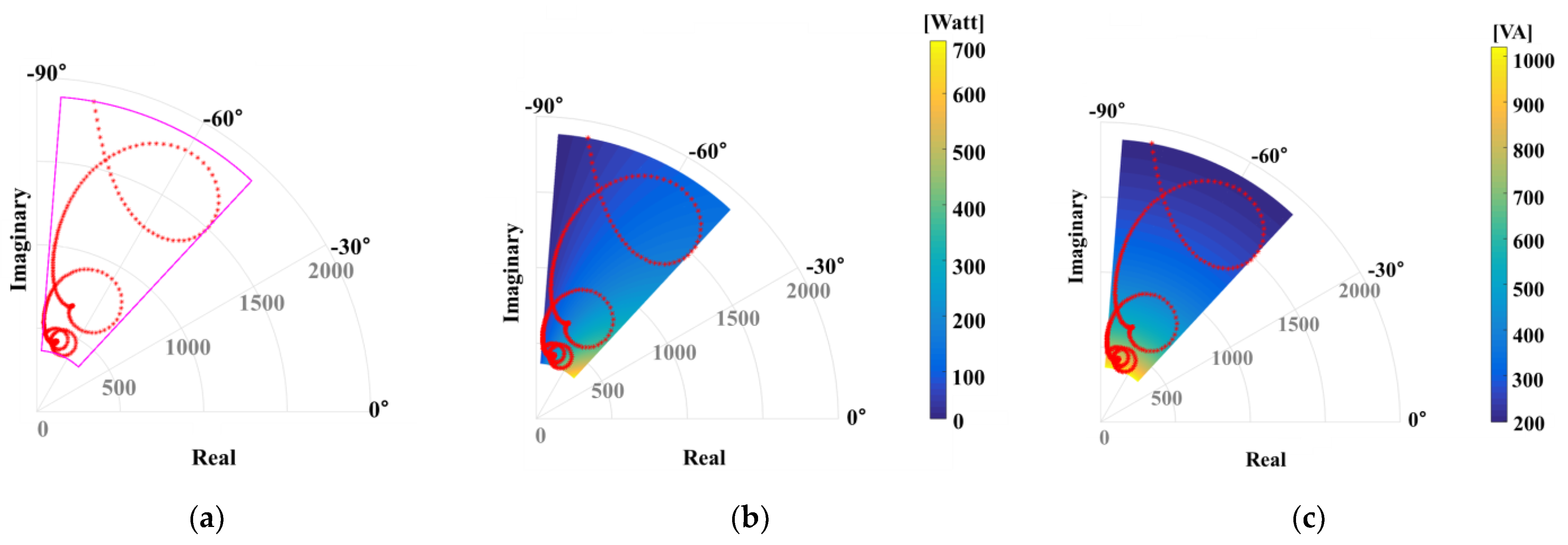
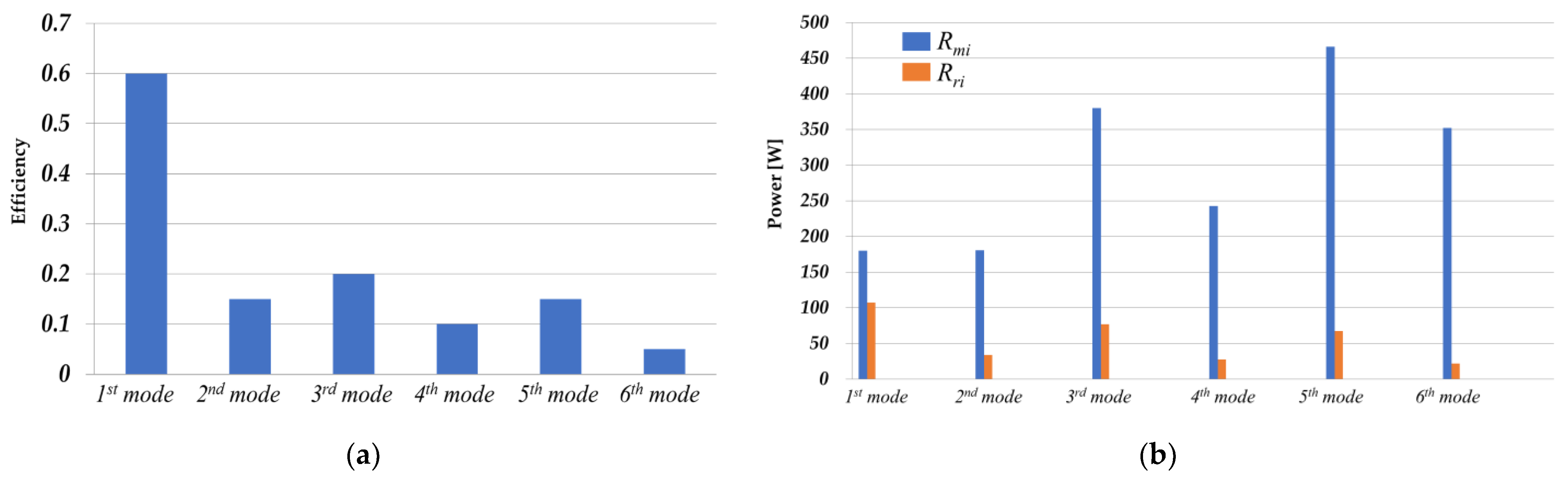
3.3. Effective Power
3.3.1. Simulation Condition
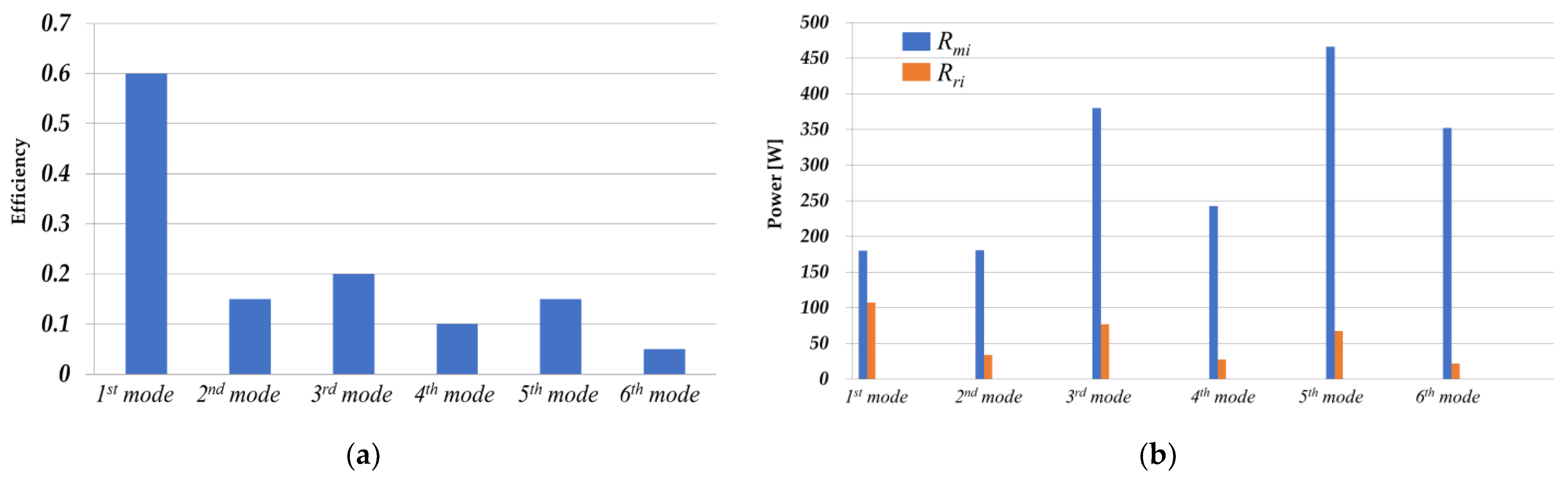
3.3.2. Results
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, J.H.; Mok, H.S. Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization. Energies 2019, 12, 4646. [Google Scholar] [CrossRef] [Green Version]
- Song, S.M.; Kim, I.D.; Lee, B.H.; Lee, J.M. Design of Matching Circuit Transformer for High-Power Transmitter of Active Sonar. J. Electr. Eng. Technol. 2020, 15, 2145–2155. [Google Scholar] [CrossRef]
- Choi, J.; Lee, D.H.; Mok, H. Discontinuous PWM Techniques of Three-Leg Two-Phase Voltage Source Inverter for Sonar System. IEEE Access 2020, 8, 199864–199881. [Google Scholar] [CrossRef]
- Butler, J.L.; Butler, A.L. Ultra wideband multiple resonant transducer. IEEE Ocean. 2003, 5, 2381–2387. [Google Scholar]
- Edalafar, F.; Azimi, S.; Qureshi, A.Q.A.; Yaghootkar, B.; Keast, A.; Friedrich, B.B. A wideband, low-noise accelerometer for sonar wave detection. IEEE Sens. 2017, 18, 508–516. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Q.; Li, C.; Fu, S.; Qiu, X.; Wang, X.; Wu, H. Geometric nonlinear model for prediction of frequency–temperature behavior of SAW devices for nanosensor applications. Sensors 2020, 20, 4237. [Google Scholar] [CrossRef]
- Kim, S.; Wang, H.; Park, I.; Lee, K. Toward real time monitoring of wafer temperature in plasma chamber through surface acoustic wave resonator and mu-negative metamaterial antenna. IEEE Sens. J. 2021, 21, 19863–19871. [Google Scholar] [CrossRef]
- Crupi, G.; Gugliandolo, G.; Campobello, G.; Donato, N. Measurement-Based Extraction and Analysis of a Temperature-Dependent Equivalent-Circuit Model for a SAW Resonator: From Room Down to Cryogenic Temperatures. IEEE Sens. J. 2021, 21, 12202–12211. [Google Scholar]
- Bybi, A.; Mouhat, O.; Garoum, M.; Drissi, H.; Grondel, S. One-dimensional equivalent circuit for ultrasonic transducer arrays. Appl. Acoust. 2019, 156, 246–257. [Google Scholar] [CrossRef]
- Shen, Z.; Xu, J.; Li, Z.; Chen, Y.; Cui, Y.; Jian, X. An Improved Equivalent Circuit Simulation of High Frequency Ultrasound Transducer. Front. Mater. 2021, 8, 109. [Google Scholar] [CrossRef]
- Oakley, C.G. Calculation of ultrasonic transducer signal-to-noise ratios using the KLM model. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 1018–1026. [Google Scholar] [CrossRef]
- Redwood, M. Transient performance of a piezoelectric transducer. J. Acoust. Soc. Am. 1961, 33, 527–536. [Google Scholar] [CrossRef]
- Sherrit, S.; Mukherjee, B.K. Characterization of piezoelectric materials for transducers. arXiv 2007, arXiv:0711.2657. [Google Scholar]
- Galliere, J.M.; Latorre, L.; Papet, P. A 2-D KLM model for disk-shape piezoelectric transducers. In Proceedings of the 2009 Second International Conference on Advances in Circuits, Electronics and Micro-Electronics, Sliema, Malta, 11–16 October 2009; pp. 40–43. [Google Scholar]
- Ramesh, R.; Ebenezer, D.D. Equivalent Circuit for Broadband Underwater Transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2079–2083. [Google Scholar] [CrossRef]
- Hagmann, M.J. Analysis and equivalent circuit for accurate wideband calculations of the impedance for a piezoelectric transducer having loss. AIP Adv. 2019, 9, 085313. [Google Scholar] [CrossRef]
- Smyth, K.; Kim, S.G. Experiment and simulation validated analytical equivalent circuit model for piezoelectric micromachined ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 744–765. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Sun, H.; Liu, S.; Qiu, L.; Fang, Z.; Zheng, Y. A Broadband Resonant Noise Matching Technique for Piezoelectric Ultrasound Transducers. IEEE Sens. J. 2019, 20, 4290–4299. [Google Scholar] [CrossRef]
- Lu, S.; Boussaid, F. An inductorless self-controlled rectifier for piezoelectric energy harvesting. Sensors 2015, 15, 29192–29208. [Google Scholar] [CrossRef] [Green Version]
- Bereketli, A.; Bilgen, S. Remotely powered underwater acoustic sensor networks. IEEE Sens. J. 2012, 12, 3467–3472. [Google Scholar] [CrossRef]
- Coates, D.; Maguire, P.T. Multiple-Mode Acoustic Transducer Calculations. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 471–473. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Zhao, J.; Fei, C.; Li, D.; Zhu, Y.; Li, Z.; Guo, R.; Lou, L.; Feng, W.; Yang, Y. Particle Swarm Optimization Algorithm-Based Design Method for Ultrasonic Transducers. Micromachines 2020, 11, 715. [Google Scholar] [CrossRef] [PubMed]
- Peng, X.; Hu, L.; Liu, W.; Fu, X. Model-Based Analysis and Regulating Approach of Air-Coupled Transducers with Spurious Resonance. Sensors 2020, 20, 6184. [Google Scholar] [CrossRef] [PubMed]
- Sherman, C.H.; Butler, J.L. Transducers and Arrays for Underwater Sound; Springer: SBerlin/Heidelberg, Germany, 2007; pp. 58–75. [Google Scholar]
- Hwang, Y.H.; Ahn, H.M.; Nguyen, D.N.; Kim, W.H.; Moon, W.K. An underwater parametric array source transducer composed of PZT/thin-polymer composite. Sens. Actuators 2018, 279, 601–616. [Google Scholar] [CrossRef]
- Kim, J.W.; Roh, Y.R. Modeling and Design of a Rear-Mounted Underwater Projector Using Equivalent Circuits. Sensors 2020, 20, 7085. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| , | Acceleration constants (usually set 2) |
| Number of swarm (1, 2, …, D) | |
| Total number of unknown parameters of the equivalent model | |
| , | Uniformly distributed random numbers (between 0 and 2) |
| Inertia weight factor | |
| Number of particles (1, 2, …, b) | |
| b | Total number of particles for the swarm (unknown parameters of the equivalent model) |
| Present velocity vector of the individual particle | |
| Next velocity vector of the individual particle | |
| Present position vector of the individual particle | |
| Next position vector of the individual particle | |
| Best position vector of the swarm | |
| Best position vector of the individual particle |
| Symbol | Description |
|---|---|
| n | Data sample for the frequency band |
| Mf | Number of the total data sample of the measured impedance |
| Z*esti(n) | Estimated impedance of the equivalent circuit model for nth data sample |
| Zreal(n) | Measured impedance of the transducer for nth data sample |
| α(n) | Impedance real term of the transducer for nth data sample |
| β(n) | Impedance imaginary term of the transducer for nth data sample |
| Symbol | Description |
|---|---|
| Starting frequency (data sample) of kth resonant mode | |
| Frequency band of kth mode | |
| Estimated admittance of the equivalent circuit model for nth data sample | |
| Measured admittance of the transducer for nth data sample | |
| Estimated admittance of the kth branch for nth data sample | |
| Measured admittance of the kth resonant mode for nth data sample | |
| Estimated admittance of the ith ( branch for nth data sample |
| Parameter | Previous 1 | Previous 2 | Proposed 1 | Proposed 2 | ||
|---|---|---|---|---|---|---|
| C0 | [nF] | 13.0 | 11.0 | 10.9 | 10.9 | |
| 1st mode | Rr1 | [Ω] | - | - | - | 1257.2 |
| R1 | [Ω] | 0.0 | 1978.2 | 2095.4 | 838.1 | |
| L1 | [mH] | 7900.2 | 116.0 | 93.0 | 93.0 | |
| C1 | [nF] | 10.5 | 4.9 | 6.1 | 6.1 | |
| 2nd mode | Rr2 | [Ω] | - | - | - | 424.2 |
| R2 | [Ω] | 1048.0 | 3757.0 | 2828.0 | 2403.8 | |
| L2 | [mH] | 54.7 | 105.7 | 153.0 | 153.0 | |
| C2 | [nF] | 1.2 | 0.8 | 0.6 | 0.6 | |
| 3rd mode | Rr3 | [Ω] | - | - | - | 220.7 |
| R3 | [Ω] | 120.4 | 1115.7 | 1103.3 | 882.7 | |
| L3 | [mH] | 11401.2 | 90.2 | 81.8 | 81.8 | |
| C3 | [nF] | 60.2 | 0.7 | 0.8 | 0.8 | |
| 4th mode | Rr4 | [Ω] | - | - | - | 182.3 |
| R4 | [Ω] | 6023.3 | 1914.6 | 1822.6 | 1640.3 | |
| L4 | [mH] | 180,356.8 | 96.4 | 72.4 | 72.4 | |
| C4 | [nF] | 0.4 | 0.3 | 0.4 | 0.4 | |
| 5th mode | Rr5 | [Ω] | - | - | - | 104.7 |
| R5 | [Ω] | 41.0 | 973.9 | 937.7 | 797.0 | |
| L5 | [mH] | 12,487.3 | 61.3 | 70.3 | 70.3 | |
| C5 | [nF] | 19.7 | 0.3 | 0.3 | 0.3 | |
| 6th mode | Rr6 | [Ω] | - | - | - | 60.1 |
| R6 | [Ω] | 1972.5 | 1488.8 | 1202.3 | 1142.2 | |
| L6 | [mH] | 110.9 | 141.2 | 85.4 | 85.4 | |
| C6 | [nF] | 5.1 | 0.1 | 0.2 | 0.2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, B.-H.; Lee, J.-M.; Baek, J.-E.; Sim, J.-Y. An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer. Electronics 2021, 10, 2416. https://doi.org/10.3390/electronics10192416
Lee B-H, Lee J-M, Baek J-E, Sim J-Y. An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer. Electronics. 2021; 10(19):2416. https://doi.org/10.3390/electronics10192416
Chicago/Turabian StyleLee, Byung-Hwa, Jeong-Min Lee, Ji-Eun Baek, and Jae-Yoon Sim. 2021. "An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer" Electronics 10, no. 19: 2416. https://doi.org/10.3390/electronics10192416
APA StyleLee, B.-H., Lee, J.-M., Baek, J.-E., & Sim, J.-Y. (2021). An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer. Electronics, 10(19), 2416. https://doi.org/10.3390/electronics10192416