
Human Face Detection Techniques: A Comprehensive Review and Future Research Directions






Abstract
1. Introduction
- Different face detection algorithms are reviewed in five parts, including history, working principle, advantages, limitations, and use in fields other than face detection.
- Many face detection algorithms are reviewed, such as different statistical and neural network approaches, which were neglected in the earlier literature but gained popularity recently because of hardware development.
- Systematic discrepancies are shown between algorithms for each single method.
- A comprehensive comparison between all the methods is presented.
- A list of research challenges in face detection with further research directions to pursue is given.
2. Feature-Based Approaches
2.1. Active Shape Model (ASM)
2.1.1. Snakes
2.1.2. Deformable Template Matching (DTM)
2.1.3. Deformable Part Model (DPM)
2.1.4. Point Distribution Model (PDM)
2.2. Low Level Analysis (LLA)
2.2.1. Motion
2.2.2. Color Information
2.2.3. Gray Information
2.2.4. Edge
- Marr–Hildreth edge operator: The Marr–Hildreth edge operator [102] works by convolving the image with the Laplacian of Gaussian function. Then, zero crossing is detected in the filtered results to obtain the edges.
- Steerable filter: The steerable filter [103] is performed in three steps, which are edge detection, filter orientation of edge detection and tracking neighboring edges.
2.3. Feature Analysis (FA)
2.3.1. Feature Searching
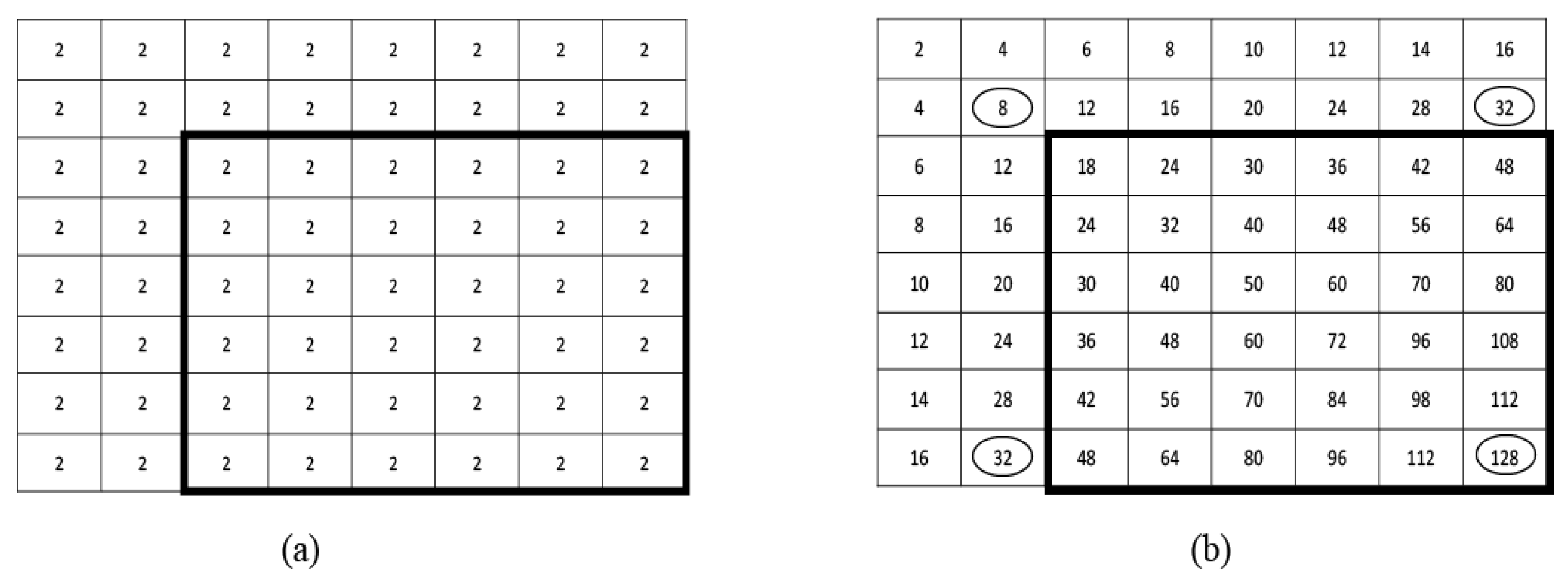
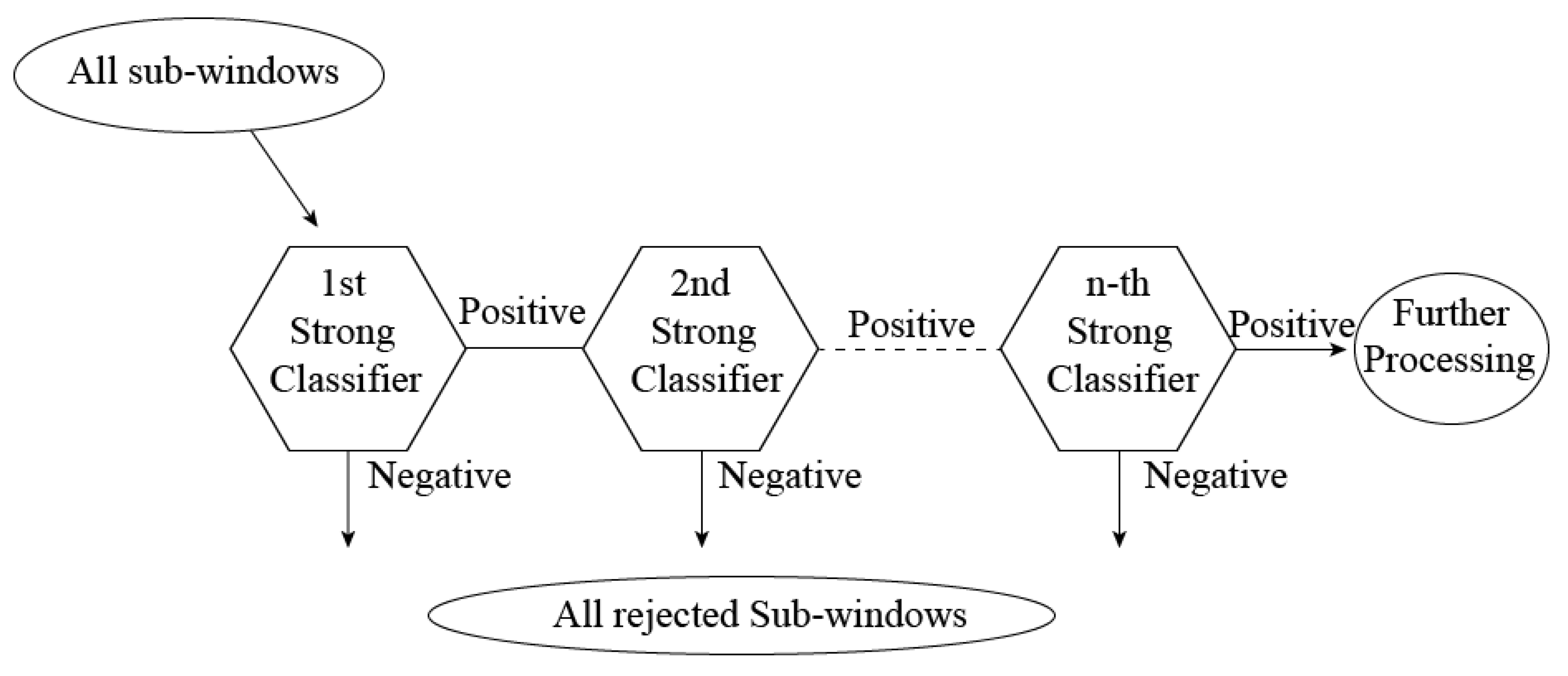
Viola–Jones Algorithm
Gabor Feature
2.3.2. Constellation Analysis
3. Image-Based Approaches
3.1. Neural Network
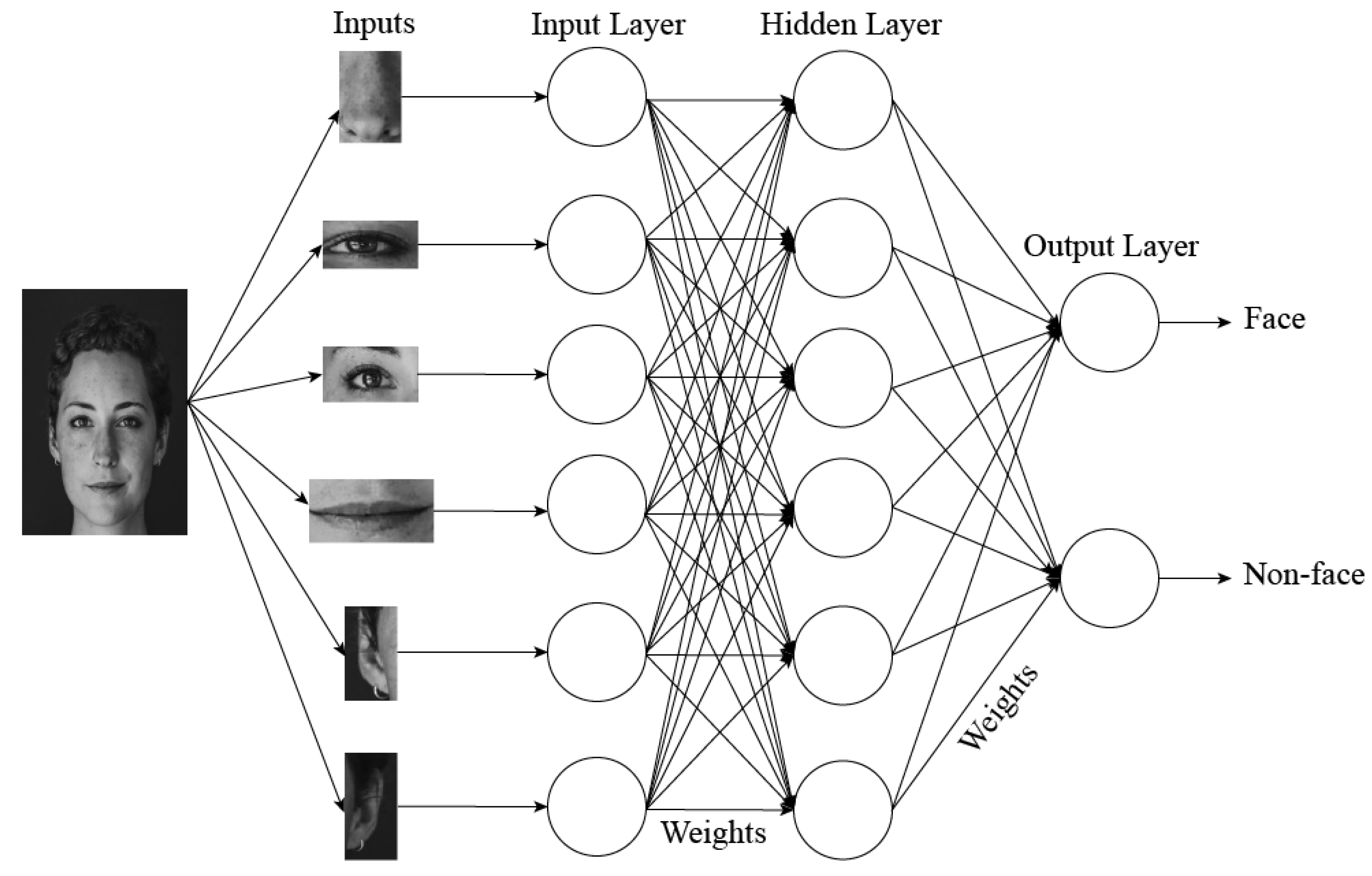
3.1.1. Artificial Neural Network (ANN)
Retinal Connected Neural Network (RCNN)
Feed Forward Neural Network (FFNN)
Back Propagation Neural Network (BPNN)
Radial Basis Function Neural Network (RBFNN)
Rotation Invariant Neural Network (RINN)
Fast Neural Network (FNN)
Polynomial Neural Network (PNN)
Convolutional Neural Network (CNN)
3.1.2. Decision-Based Neural Network (DBNN)
3.1.3. Fuzzy Neural Network (FNN)
3.2. Linear Subspace
3.2.1. Eigenfaces
3.2.2. Probabilistic Eigenspaces
3.2.3. Fisherfaces
3.2.4. Tensorfaces
3.3. Statistical Approaches
3.3.1. Principle Component Analysis (PCA)
3.3.2. Support Vector Machine (SVM)
3.3.3. Discrete Cosine Transform (DCT)
3.3.4. Locality Preserving Projection (LPP)
3.3.5. Independent Component Analysis (ICA)
4. Comparisons
5. Future Research Direction
5.1. Face Masks and Face Shields
5.2. Fusion of Algorithms
5.3. Energy Efficient Algorithms
5.4. Use of Contextual Information
5.5. Adaptive and Simulated Face Detection System
5.6. Faster Face Detection Systems
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ismail, N.; Sabri, M.I.M. Review of existing algorithms for face detection and recognition. In Proceedings of the 8th WSEAS International Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Kuala Lumpur, Malaysia, 14–16 December 2009; pp. 30–39. [Google Scholar]
- Al-Allaf, O.N. Review of face detection systems based artificial neural networks algorithms. arXiv 2014, arXiv:1404.1292. [Google Scholar] [CrossRef]
- Hjelmås, E.; Low, B.K. Face detection: A survey. Comput. Vis. Image Underst. 2001, 83, 236–274. [Google Scholar] [CrossRef]
- Kumar, A.; Kaur, A.; Kumar, M. Face detection techniques: A review. Artif. Intell. 2019, 52, 927–948. [Google Scholar] [CrossRef]
- Yang, M.H.; Kriegman, D.J.; Ahuja, N. Detecting faces in images: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 34–58. [Google Scholar] [CrossRef]
- Srivastava, A.; Mane, S.; Shah, A.; Shrivastava, N.; Thakare, B. A survey of face detection algorithms. In Proceedings of the 2017 International Conference on Inventive Systems and Control (ICISC), JCT College of Engineering and Technology, Coimbatore, India, 19–20 January 2017; pp. 1–4. [Google Scholar]
- Kumar, A.; Kaur, A.; Kumar, M. Review Paper on Face Detection Techniques. IJERT 2020, 8, 32–33. [Google Scholar]
- Wang, M.; Deng, W. Deep face recognition: A survey. Neurocomputing 2021, 429, 215–244. [Google Scholar] [CrossRef]
- Minaee, S.; Luo, P.; Lin, Z.; Bowyer, K.W. Going Deeper Into Face Detection: A Survey. arXiv 2021, arXiv:2103.14983. [Google Scholar]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Nikolaidis, A.; Pitas, I. Facial feature extraction and pose determination. Pattern Recognit. 2000, 33, 1783–1791. [Google Scholar] [CrossRef]
- Gum, S.R.; Nixon, M.S. Active Contours for Head Boundary Extraction by Global and Local Energy Minimisation. IEE Colloq. Image Process. Biomed. Meas. 1994, 6, 1. [Google Scholar]
- Huang, C.L.; Chen, C.W. Human facial feature extraction for face interpretation and recognition. Pattern Recognit. 1992, 25, 1435–1444. [Google Scholar] [CrossRef]
- Yuille, A.L.; Hallinan, P.W.; Cohen, D.S. Feature extraction from faces using deformable templates. Int. J. Comput. Vision 1992, 8, 99–111. [Google Scholar] [CrossRef]
- Felzenszwalb, P. Representation and detection of deformable shapes. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 208–220. [Google Scholar] [CrossRef]
- Zhu, L.; Chen, Y.; Yuille, A. Learning a Hierarchical Deformable Template for Rapid Deformable Object Parsing. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1029–1043. [Google Scholar] [CrossRef] [PubMed]
- Nishida, K.; Enami, N.; Ariki, Y. Detection of facial parts via deformable part model using part annotation. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Hong Kong, China, 16–19 December 2015. [Google Scholar] [CrossRef]
- Yanagisawa, H.; Ishii, D.; Watanabe, H. Face detection for comic images with deformable part model. In Proceedings of the The Fourth IIEEJ International Workshop on Image Electronics and Visual Computing, Samui, Thailand, 7–10 October 2014. [Google Scholar]
- Cootes, T.F.; Taylor, C.J. Active shape models—‘Smart snakes’. In BMVC92; Springer: London, UK, 1992; pp. 266–275. [Google Scholar]
- Lanitis, A.; Cootes, T.; Taylor, C. Automatic tracking, coding and reconstruction of human faces, using flexible appearance models. Electron. Lett. 1994, 30, 1587–1588. [Google Scholar] [CrossRef]
- Lanitis, A.; Hill, A.; Cootes, T.F.; Taylor, C. Locating Facial Features Using Genetic Algorithms. In Proceedings of the 27th International Conference on Digital Signal Processing, Limassol, Cyprus, 26–28 June 1995; pp. 520–525. [Google Scholar]
- Van Beek, P.J.; Reinders, M.J.; Sankur, B.; van der Lubbe, J.C. Semantic segmentation of videophone image sequences. In Proceedings of the Visual Communications and Image Processing’92, International Society for Optics and Photonics, Boston, MA, USA, 1 November 1992; Volume 1818, pp. 1182–1193. [Google Scholar]
- Turk, M.; Pentland, A. Eigenfaces for recognition. J. Cogn. Neurosci. 1991, 3, 71–86. [Google Scholar] [CrossRef]
- Luthon, F.; Lievin, M. Lip motion automatic detection. In Proceedings of the Scandinavian Conference on Image Analysis, Lappeenranta, Finland, 9–11 June 1997. [Google Scholar]
- Crowley, J.L.; Berard, F. Multi-modal tracking of faces for video communications. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 640–645. [Google Scholar]
- McKenna, S.; Gong, S.; Liddell, H. Real-time tracking for an integrated face recognition system. In Proceedings of the Second European Workshop on Parallel Modelling of Neural Operators, Faro, Portugal, 7–9 November 1995; Volume 11. [Google Scholar]
- Kovac, J.; Peer, P.; Solina, F. Human skin color clustering for face detection. In Proceedings of the IEEE Region 8 EUROCON 2003, Computer as a Tool, Ljubljana, Slovenia, 22–24 September 2003; Volume 2, pp. 144–148. [Google Scholar]
- Liu, Q.; Peng, G.z. A robust skin color based face detection algorithm. In Proceedings of the 2010 2nd International Asia Conference on Informatics in Control, Automation and Robotics (CAR 2010), Wuhan, China, 6–7 March 2010; Volume 2, pp. 525–528. [Google Scholar]
- Ban, Y.; Kim, S.K.; Kim, S.; Toh, K.A.; Lee, S. Face detection based on skin color likelihood. Pattern Recognit. 2014, 47, 1573–1585. [Google Scholar] [CrossRef]
- Zangana, H.M. A New Skin Color Based Face Detection Algorithm by Combining Three Color Model Algorithms. IOSR J. Comput. Eng. 2015, 17, 06–125. [Google Scholar]
- Graf, H.P.; Cosatto, E.; Gibbon, D.; Kocheisen, M.; Petajan, E. Multi-modal system for locating heads and faces. In Proceedings of the Second International Conference on Automatic Face and Gesture Recognition, Killington, VT, USA, 14–16 October 1996; pp. 88–93. [Google Scholar]
- Sakai, T. Computer analysis and classification of photographs of human faces. In Proceedings of the First USA—Japan Computer Conference, Tokyo, Japan, 3–5 October 1972; pp. 55–62. [Google Scholar]
- Craw, I.; Ellis, H.; Lishman, J.R. Automatic extraction of face-feature. Pattern Recognit. Lett. 1987, 5, 183–187. [Google Scholar] [CrossRef]
- Sikarwar, R.; Agrawal, A.; Kushwah, R.S. An Edge Based Efficient Method of Face Detection and Feature Extraction. In Proceedings of the 2015 Fifth International Conference on Communication Systems and Network Technologies, Gwalior, India, 4–6 April 2015; pp. 1147–1151. [Google Scholar]
- Suzuki, Y.; Shibata, T. Multiple-clue face detection algorithm using edge-based feature vectors. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004; Volume 5. [Google Scholar]
- Froba, B.; Kublbeck, C. Robust face detection at video frame rate based on edge orientation features. In Proceedings of the Fifth IEEE International Conference on Automatic Face Gesture Recognition, Washington, DC, USA, 21 May 2002; pp. 342–347. [Google Scholar]
- Suzuki, Y.; Shibata, T. An edge-based face detection algorithm robust against illumination, focus, and scale variations. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 2279–2282. [Google Scholar]
- De Silva, L.; Aizawa, K.; Hatori, M. Detection and Tracking of Facial Features by Using Edge Pixel Counting and Deformable Circular Template Matching. IEICE Trans. Inf. Syst. 1995, 78, 1195–1207. [Google Scholar]
- Jeng, S.H.; Liao, H.Y.M.; Han, C.C.; Chern, M.Y.; Liu, Y.T. Facial feature detection using geometrical face model: An efficient approach. Pattern Recognit. 1998, 31, 273–282. [Google Scholar] [CrossRef]
- Herpers, R.; Kattner, H.; Rodax, H.; Sommer, G. GAZE: An attentive processing strategy to detect and analyze the prominent facial regions. In Proceedings of the International Workshop on Automatic Face and Gesture Recognition, Zurich, Switzerland, 26–28 June 1995; pp. 214–220. [Google Scholar]
- Viola, P.; Jones, M. Robust Real-time Object Detection. Int. J. Comput. Vis. 2001, 4, 34–47. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Volume 1, p. I. [Google Scholar]
- Li, J.; Zhang, Y. Learning surf cascade for fast and accurate object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3468–3475. [Google Scholar]
- Viola, P.; Jones, M.J. Robust real-time face detection. Int. J. Comput. Vision 2004, 57, 137–154. [Google Scholar] [CrossRef]
- He, D.C.; Wang, L. Texture unit, texture spectrum, and texture analysis. IEEE Trans. Geosci. Remote Sens. 1990, 28, 509–512. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Harwood, D. Performance evaluation of texture measures with classification based on Kullback discrimination of distributions. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; Volume 1, pp. 582–585. [Google Scholar]
- Wang, X.; Han, T.X.; Yan, S. An HOG-LBP human detector with partial occlusion handling. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 32–39. [Google Scholar]
- Freund, Y.; Schapire, R.E. Experiments with a new boosting algorithm. ICML 1996, 96, 148–156. [Google Scholar]
- Gabor, D. Theory of communication. Part 1: The analysis of information. J. Inst. Electr.-Eng.-Part III Radio Commun. Eng. 1946, 93, 429–441. [Google Scholar] [CrossRef]
- Sharif, M.; Khalid, A.; Raza, M.; Mohsin, S. Face Recognition using Gabor Filters. J. Appl. Comput. Sci. Math. 2011, 5, 53–57. [Google Scholar]
- Rahman, M.T.; Bhuiyan, M.A. Face recognition using gabor filters. In Proceedings of the 2008 11th International Conference on Computer and Information Technology, Khulna, Bangladesh, 24–27 December 2008; pp. 510–515. [Google Scholar]
- Burl, M.C.; Perona, P. Recognition of planar object classes. In Proceedings of the CVPR IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 18–20 June 1996; pp. 223–230. [Google Scholar]
- Huang, W.; Mariani, R. Face detection and precise eyes location. In Proceedings of the 15th International Conference on Pattern Recognition (ICPR-2000), Barcelona, Spain, 3–7 September 2000; Volume 4, pp. 722–727. [Google Scholar]
- Burl, M.C.; Leung, T.K.; Perona, P. Face localization via shape statistics. In Proceedings of the Internatational Workshop on Automatic Face and Gesture Recognition. Citeseer, Zurich, Switzerland, 26–28 June 1995; pp. 154–159. [Google Scholar]
- Bhuiyan, A.A.; Liu, C.H. On face recognition using gabor filters. World Acad. Sci. Eng. Technol. 2007, 28, 195–200. [Google Scholar]
- Yow, K.C.; Cipolla, R. Feature-based human face detection. Image Vision Comput. 1997, 15, 713–735. [Google Scholar] [CrossRef]
- Berger, M.O.; Mohr, R. Towards autonomy in active contour models. In Proceedings of the 10th International Conference on Pattern Recognition, Atlantic City, NJ, USA, 16–21 June 1990. [Google Scholar] [CrossRef]
- Davatzikos, C.A.; Prince, J.L. Convergence analysis of the active contour model with applications to medical images. In Proceedings of the Visual Communications and Image Processing ’92; Maragos, P., Ed.; International Society for Optics and Photonics, SPIE: Boston, MA, USA, 1992; Volume 1818, pp. 1244–1255. [Google Scholar] [CrossRef]
- Alvarez, L.; Baumela, L.; Márquez-Neila, P.; Henríquez, P. A real time morphological snakes algorithm. Image Process. On Line 2012, 2, 1–7. [Google Scholar] [CrossRef]
- Leymarie, F.; Levine, M.D. New Method For Shape Description Based On An Active Contour Model. In Intelligent Robots and Computer Vision VIII: Algorithms and Techniques; Casasent, D.P., Ed.; International Society for Optics and Photonics, SPIE: Boston, MA, USA, 1990; Volume 1192, pp. 536–547. [Google Scholar] [CrossRef]
- Ramesh, R.; Kulkarni, A.C.; Prasad, N.R.; Manikantan, K. Face Recognition Using Snakes Algorithm and Skin Detection Based Face Localization. In Proceedings of the International Conference on Signal, Networks, Computing, and Systems; Lobiyal, D.K., Mohapatra, D.P., Nagar, A., Sahoo, M.N., Eds.; Springer India: New Delhi, India, 2017; pp. 61–71. [Google Scholar]
- Leymarie, F.F.; Levine, M.D. Tracking deformable objects in the plane using an active contour model. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 617–634. [Google Scholar] [CrossRef]
- Menet, S.; Saint-Marc, P.; Medioni, G. Active contour models: Overview, implementation and applications. In Proceedings of the 1990 IEEE International Conference on Systems, Man, and Cybernetics Conference, Los Angeles, CA, USA, 4–7 November 1990; pp. 194–199. [Google Scholar] [CrossRef]
- Grauman, K. Physics-based Vision: Active Contours (Snakes). Available online: https://www.cs.utexas.edu (accessed on 14 October 2019).
- Kabolizade, M.; Ebadi, H.; Ahmadi, S. An improved snake model for automatic extraction of buildings from urban aerial images and LiDAR data. Comput. Environ. Urban Syst. 2010, 34, 435–441. [Google Scholar] [CrossRef]
- Fang, H.; Kim, J.W.; Jang, J.W. A Fast Snake Algorithm for Tracking Multiple Objects. J. Inf. Process. Syst. 2011, 7, 519–530. [Google Scholar] [CrossRef][Green Version]
- Saito, Y.; Kenmochi, Y.; Kotani, K. Extraction of a symmetric object for eyeglass face analysis using active contour model. In Proceedings of the 2000 International Conference on Image Processing (Cat. No.00CH37101), Vancouver, BC, Canada, 10–13 September 2000; p. TA07.07. [Google Scholar] [CrossRef]
- Lee, H.; Kwon, H.; Robinson, R.M.; Nothwang, W.D. DTM: Deformable template matching. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 1966–1970. [Google Scholar]
- Wang, W.; Huang, Y.; Zhang, R. Driver gaze tracker using deformable template matching. In Proceedings of the 2011 IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 10–12 July 2011; pp. 244–247. [Google Scholar]
- Kluge, K.; Lakshmanan, S. A deformable-template approach to lane detection. In Proceedings of the Intelligent Vehicles ’95. Symposium, Detroit, MI, USA, 25–26 September 1995; pp. 54–59. [Google Scholar] [CrossRef]
- Jolly, M.P.D.; Lakshmanan, S.; Jain, A. Vehicle segmentation and classification using deformable templates. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 293–308. [Google Scholar] [CrossRef]
- Moni, M.A.; Ali, A.B.M.S. Object Identification Based on Deformable Templates and Genetic Algorithms. In Proceedings of the 2009 International Conference on Business Intelligence and Financial Engineering, Beijing, China, 24–26 July 2009. [Google Scholar] [CrossRef]
- Fischler, M.A.; Elschlager, R.A. The representation and matching of pictorial structures. IEEE Trans. Comput. 1973, 100, 67–92. [Google Scholar] [CrossRef]
- Ranjan, R.; Patel, V.M.; Chellappa, R. A deep pyramid Deformable Part Model for face detection. In Proceedings of the 2015 IEEE 7th International Conference on Biometrics Theory, Applications and Systems (BTAS), Arlington, VA, USA, 8–11 September 2015. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, X.; Lei, Z.; Li, S.Z. Real-time high performance deformable model for face detection in the wild. In Proceedings of the 2013 international conference on Biometrics (ICB), Madrid, Spain, 4–7 June 2013; pp. 1–6. [Google Scholar]
- Marčetić, D.; Ribarić, S. Deformable part-based robust face detection under occlusion by using face decomposition into face components. In Proceedings of the 2016 39th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 30 May–3 June 2016; pp. 1365–1370. [Google Scholar]
- Yan, J.; Lei, Z.; Wen, L.; Li, S.Z. The Fastest Deformable Part Model for Object Detection. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Yang, Y.; Ramanan, D. Articulated pose estimation with flexible mixtures-of-parts. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011. [Google Scholar] [CrossRef]
- Yan, J.; Lei, Z.; Yi, D.; Li, S.Z. Multi-pedestrian detection in crowded scenes: A global view. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, X.; Lei, Z.; Liao, S.; Li, S.Z. Robust Multi-resolution Pedestrian Detection in Traffic Scenes. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar] [CrossRef]
- Boukamcha, H.; Elhallek, M.; Atri, M.; Smach, F. 3D face landmark auto detection. In Proceedings of the 2015 World Symposium on Computer Networks and Information Security (WSCNIS), Hammamet, Tunisia, 19–21 September 2015; pp. 1–6. [Google Scholar]
- Edwards, G.J.; Taylor, C.J.; Cootes, T.F. Learning to identify and track faces in image sequences. In Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat. No.98CH36271), Nara, Japan, 14–16 April 1998; pp. 317–322. [Google Scholar] [CrossRef]
- Lee, C.H.; Kim, J.S.; Park, K.H. Automatic human face location in a complex background using motion and color information. Pattern Recognit. 1996, 29, 1877–1889. [Google Scholar] [CrossRef]
- Schunck, B.G. Image flow segmentation and estimation by constraint line clustering. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 1010–1027. [Google Scholar] [CrossRef]
- Hasan, M.M.; Yusuf, M.S.U.; Rohan, T.I.; Roy, S. Efficient two stage approach to detect face liveness: Motion based and Deep learning based. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019; pp. 1–6. [Google Scholar]
- Hazar, M.; Mohamed, H.; Hanêne, B.A. Real time face detection based on motion and skin color information. In Proceedings of the 2012 IEEE 10th International Symposium on Parallel and Distributed Processing with Applications, Leganes, Spain, 10–13 July 2012; pp. 799–806. [Google Scholar]
- Naido, S.; Porle, R.R. Face Detection Using Colour and Haar Features for Indoor Surveillance. In Proceedings of the 2020 IEEE 2nd International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Kota Kinabalu, Malaysia, 26–27 September 2020; pp. 1–5. [Google Scholar]
- Dong, J.; Qu, X.; Li, H. Color tattoo segmentation based on skin color space and K-mean clustering. In Proceedings of the 2017 4th International Conference on Information, Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 53–56. [Google Scholar]
- Chang, C.; Sun, Y. Hand Detections Based on Invariant Skin-Color Models Constructed Using Linear and Nonlinear Color Spaces. In Proceedings of the 2008 International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Harbin, China, 15–17 August 2008; pp. 577–580. [Google Scholar]
- Tan, W.; Dai, G.; Su, H.; Feng, Z. Gesture segmentation based on YCb’Cr’ color space ellipse fitting skin color modeling. In Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 1905–1908. [Google Scholar]
- Huang, D.; Lin, T.; Hu, W.; Chen, M. Eye Detection Based on Skin Color Analysis with Different Poses under Varying Illumination Environment. In Proceedings of the 2011 Fifth International Conference on Genetic and Evolutionary Computing, Kitakyushu, Japan, 29 August–1 September 2011; pp. 252–255. [Google Scholar]
- Cosatto, E.; Graf, H.P. Photo-realistic talking-heads from image samples. IEEE Trans. Multimedia 2000, 2, 152–163. [Google Scholar] [CrossRef]
- Yoo, T.W.; Oh, I.S. A Fast Algorithm for Tracking Human Faces Based on Chromatic Histograms. Pattern Recogn. Lett. 1999, 20, 967–978. [Google Scholar] [CrossRef]
- Cao, W.; Huang, S. Grayscale Feature Based Multi-Target Tracking Algorithm. In Proceedings of the 2019 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 6–8 December 2019; pp. 581–585. [Google Scholar]
- Wang, L.; Yang, K.; Song, Z.; Peng, C. A self-adaptive image enhancing method based on grayscale power transformation. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 483–486. [Google Scholar]
- Liu, Q.; Ying, J. Grayscale image digital watermarking technology based on wavelet analysis. In Proceedings of the 2012 IEEE Symposium on Electrical & Electronics Engineering (EEESYM), Kuala Lumpur, Malaysia, 24–27 June 2012; pp. 618–621. [Google Scholar]
- Bukhari, S.S.; Breuel, T.M.; Shafait, F. Textline information extraction from grayscale camera-captured document images. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009; pp. 2013–2016. [Google Scholar]
- Patel, D.; Parmar, S. Image retrieval based automatic grayscale image colorization. In Proceedings of the 2013 Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, India, 28–30 November 2013; pp. 1–6. [Google Scholar]
- Brunelli, R.; Poggio, T. Face recognition: Features versus templates. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 1042–1052. [Google Scholar] [CrossRef]
- De Silva, L. Detection and tracking of facial features by using a facial feature model and deformable circular templates. IEICE Trans. Inf. Syst. 1995, 78, 1195–1207. [Google Scholar]
- Li, X.; Roeder, N. Face contour extraction from front-view images. Pattern Recognit. 1995, 28, 1167–1179. [Google Scholar] [CrossRef]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1980, 207, 187–217. [Google Scholar]
- Herpers, R.; Michaelis, M.; Lichtenauer, K.H.; Sommer, G. Edge and keypoint detection in facial regions. In Proceedings of the Second International Conference on Automatic Face and Gesture Recognition, Killington, VT, USA, 14–16 October 1996; pp. 212–217. [Google Scholar]
- Anila, S.; Devarajan, N. Simple and fast face detection system based on edges. Int. J. Univers. Comput. Sci. 2010, 1, 54–58. [Google Scholar]
- Chen, N.; Men, X.; Han, X.; Wang, X.; Sun, J.; Chen, H. Edge detection based on machine vision applying to laminated wood edge cutting process. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 449–454. [Google Scholar]
- Zhang, X.Y.; Zhao, R.C. Automatic video object segmentation using wavelet transform and moving edge detection. In Proceedings of the 2006 International Conference on Machine Learning and Cybernetics, Dalian, China, 13–16 August 2006; pp. 1174–1177. [Google Scholar]
- Liu, Y.; Tang, S. An application of artificial bee colony optimization to image edge detection. In Proceedings of the 2017 13th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Guilin, China, 29–31 July 2017; pp. 923–929. [Google Scholar]
- Fan, X.; Cheng, Y.; Fu, Q. Moving target detection algorithm based on Susan edge detection and frame difference. In Proceedings of the 2015 2nd International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015; pp. 323–326. [Google Scholar]
- Yousef, A.; Bakr, M.; Shirani, S.; Milliken, B. An Edge Detection Approach For Conscious Machines. In Proceedings of the 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 595–596. [Google Scholar]
- Al-Tuwaijari, J.M.; Shaker, S.A. Face Detection System Based Viola-Jones Algorithm. In Proceedings of the 2020 6th International Engineering Conference “Sustainable Technology and Development” (IEC), Erbil, Iraq, 26–27 February 2020; pp. 211–215. [Google Scholar]
- Chaudhari, M.; Sondur, S.; Vanjare, G. A review on Face Detection and study of Viola Jones method. IJCTT 2015, 25, 54–61. [Google Scholar] [CrossRef]
- Wang, Y.Q. An analysis of the Viola-Jones face detection algorithm. Image Process. On Line 2014, 4, 128–148. [Google Scholar] [CrossRef]
- Rahman, M.A.; Zayed, T. Viola-Jones Algorithm for Automatic Detection of Hyperbolic Regions in GPR Profiles of Bridge Decks. In Proceedings of the 2018 IEEE Southwest Symposium on Image Analysis and Interpretation (SSIAI), Las Vegas, NV, USA, 8–10 April 2018; pp. 1–4. [Google Scholar]
- Huang, J.; Shang, Y.; Chen, H. Improved Viola-Jones face detection algorithm based on HoloLens. EURASIP J. Image Video Process. 2019, 2019, 41. [Google Scholar] [CrossRef]
- Winarno, E.; Hadikurniawati, W.; Nirwanto, A.A.; Abdullah, D. Multi-View Faces Detection Using Viola-Jones Method. J. Phys. Conf. Ser. 2018, 1114, 012068. [Google Scholar] [CrossRef]
- Kirana, K.C.; Wibawanto, S.; Herwanto, H.W. Facial Emotion Recognition Based on Viola-Jones Algorithm in the Learning Environment. In Proceedings of the 2018 International Seminar on Application for Technology of Information and Communication, Semarang, Indonesia, 21–22 September 2018; pp. 406–410. [Google Scholar]
- Kirana, K.C.; Wibawanto, S.; Herwanto, H.W. Emotion recognition using fisher face-based viola-jones algorithm. Proc. Electr. Eng. Comput. Sci. Inform. 2018, 5, 173–177. [Google Scholar]
- Hasan, M.K.; Ullah, S.H.; Gupta, S.S.; Ahmad, M. Drowsiness detection for the perfection of brain computer interface using Viola-jones algorithm. In Proceedings of the 2016 3rd International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 22–24 September 2016; pp. 1–5. [Google Scholar]
- Saleque, A.M.; Chowdhury, F.S.; Khan, M.R.A.; Kabir, R.; Haque, A.B. Bengali License Plate Detection using Viola-Jones Algorithm. IJITEE 2019, 9. [Google Scholar] [CrossRef]
- Bouwmans, T.; Silva, C.; Marghes, C.; Zitouni, M.S.; Bhaskar, H.; Frelicot, C. On the role and the importance of features for background modeling and foreground detection. Comput. Sci. Rev. 2018, 28, 26–91. [Google Scholar] [CrossRef]
- Priya, T.V.; Sanchez, G.V.; Raajan, N. Facial recognition system using local binary patterns (LBP). Int. J. Pure Appl. Math. 2018, 119, 1895–1899. [Google Scholar]
- Huang, D.; Shan, C.; Ardabilian, M.; Wang, Y.; Chen, L. Local binary patterns and its application to facial image analysis: A survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 41, 765–781. [Google Scholar] [CrossRef]
- Jun, Z.; Jizhao, H.; Zhenglan, T.; Feng, W. Face detection based on LBP. In Proceedings of the 2017 13th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Yangzhou, China, 20–22 October 2017; pp. 421–425. [Google Scholar]
- Hadid, A. The local binary pattern approach and its applications to face analysis. In Proceedings of the 2008 First Workshops on Image Processing Theory, Tools and Applications, Sousse, Tunisia, 23–26 November 2008; pp. 1–9. [Google Scholar]
- Rahim, M.A.; Azam, M.S.; Hossain, N.; Islam, M.R. Face recognition using local binary patterns (LBP). Glob. J. Comput. Sci. Technol. 2013, 13. Available online: https://core.ac.uk/download/pdf/231150157.pdf (accessed on 10 September 2021).
- Chang-Yeon, J. Face Detection using LBP features. Final. Proj. Rep. 2008, 77, 1–4. [Google Scholar]
- Liu, X.; Xue, F.; Teng, L. Surface defect detection based on gradient lbp. In Proceedings of the 2018 IEEE 3rd International Conference on Image, Vision and Computing (ICIVC), Chongqing, China, 27–29 June 2018; pp. 133–137. [Google Scholar]
- Varghese, A.; Varghese, R.R.; Balakrishnan, K.; Paul, J.S. Level identification of brain MR images using histogram of a LBP variant. In Proceedings of the 2012 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2012; pp. 1–4. [Google Scholar]
- Ma, B.; Zhang, W.; Shan, S.; Chen, X.; Gao, W. Robust head pose estimation using LGBP. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 2, pp. 512–515. [Google Scholar]
- Nurzynska, K.; Smolka, B. Smile veracity recognition using LBP features for image sequence processing. In Proceedings of the 2016 International Conference on Systems Informatics, Modelling and Simulation (SIMS), Riga, Latvia, 1–3 June 2016; pp. 89–93. [Google Scholar]
- Zhang, F.; Liu, Y.; Zou, C.; Wang, Y. Hand gesture recognition based on HOG-LBP feature. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–6. [Google Scholar]
- Rajput, G.; Ummapure, S.B. Script Identification from Handwritten document Images Using LBP Technique at Block level. In Proceedings of the 2019 International Conference on Data Science and Communication (IconDSC), Bangalore, India, 1–2 March 2019; pp. 1–6. [Google Scholar]
- Li, P.; Wang, H.; Li, Y.; Liu, M. Analysis of AdaBoost-based face detection algorithm. In Proceedings of the 2019 International Conference on Electronic Engineering and Informatics (EEI), Nanjing, China, 8–10 November 2019; pp. 458–462. [Google Scholar]
- Hao, Z.; Feng, Q.; Kaidong, L. An Optimized Face Detection Based on Adaboost Algorithm. In Proceedings of the 2018 International Conference on Information Systems and Computer Aided Education (ICISCAE), Changchun, China, 6–8 July 2018; pp. 375–378. [Google Scholar]
- Peng, P.; Zhang, Y.; Wu, Y.; Zhang, H. An Effective Fault Diagnosis Approach Based On Gentle AdaBoost and AdaBoost. MH. In Proceedings of the 2018 IEEE International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 16–18 November 2018; pp. 8–12. [Google Scholar]
- Aleem, S.; Capretz, L.F.; Ahmed, F. Benchmarking machine learning technologies for software defect detection. arXiv 2015, arXiv:1506.07563. [Google Scholar]
- Yadahalli, S.; Nighot, M.K. Adaboost based parameterized methods for wireless sensor networks. In Proceedings of the 2017 International Conference On Smart Technologies For Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; pp. 1370–1374. [Google Scholar]
- Bin, Z.; Lianwen, J. Handwritten Chinese similar characters recognition based on AdaBoost. In Proceedings of the 2007 Chinese Control Conference, Zhangjiajie, China, 26–31 July 2007; pp. 576–579. [Google Scholar]
- Selvathi, D.; Selvaraj, H. Segmentation Of Brain Tumor Tissues In Mr Images Using Multiresolution Transforms And Random Forest Classifier With Adaboost Technique. In Proceedings of the 2018 26th ICSEng, Sydney, NSW, Australia, 18–20 December 2018; pp. 1–7. [Google Scholar]
- Lu, H.; Gao, H.; Ye, M.; Wang, X. A Hybrid Ensemble Algorithm Combining AdaBoost and Genetic Algorithm for Cancer Classification with Gene Expression Data. IEEE/ACM Trans. Comput. Biol. Bioinf. 2019, 18, 863–870. [Google Scholar] [CrossRef]
- Lades, M.; Vorbruggen, J.C.; Buhmann, J.; Lange, J.; Von Der Malsburg, C.; Wurtz, R.P.; Konen, W. Distortion invariant object recognition in the dynamic link architecture. IEEE Trans. Comput. 1993, 42, 300–311. [Google Scholar] [CrossRef]
- Wiskott, L.; Fellous, J.M.; Kruger, N.; von der Malsburg, C. Face recognition by elastic bunch graph matching. In Intelligent Biometric Techniques in Fingerprint and Face Recognition; 1999; pp. 355–396. Available online: https://www.face-rec.org/algorithms/ebgm/wisfelkrue99-facerecognition-jainbook.pdf (accessed on 10 September 2021).
- Shan, S.; Yang, P.; Chen, X.; Gao, W. AdaBoost Gabor Fisher classifier for face recognition. In Proceedings of the International Workshop on Analysis and Modeling of Faces and Gestures, Beijing, China, 16 October 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 279–292. [Google Scholar]
- Shen, L.; Bai, L. A review on Gabor wavelets for face recognition. Pattern Anal. Appl. 2006, 9, 273–292. [Google Scholar] [CrossRef]
- Bhele, S.G.; Mankar, V. A review paper on face recognition techniques. IJARCET 2012, 1, 339–346. [Google Scholar]
- Deng, H.B.; Jin, L.W.; Zhen, L.X.; Huang, J.C. A new facial expression recognition method based on local Gabor filter bank and PCA plus LDA. Int. J. Inf. Technol. 2005, 11, 86–96. [Google Scholar]
- Shen, L.; Bai, L. Information theory for Gabor feature selection for face recognition. EURASIP J. Adv. Signal Process. 2006, 2006, 030274. [Google Scholar] [CrossRef][Green Version]
- Mei, Z.Y.; Ming, Z.X. Face recognition base on low dimension Gabor feature using direct fractional-step LDA. In Proceedings of the International Conference on Computer Graphics, Imaging and Visualization (CGIV’05), Beijing, China, 26–29 July 2005; pp. 103–108. [Google Scholar]
- Schiele, B.; Crowley, J.L. Recognition without correspondence using multidimensional receptive field histograms. Int. J. Comput. Vision 2000, 36, 31–50. [Google Scholar] [CrossRef]
- Bouzalmat, A.; Zarghili, A.; Kharroubi, J. Facial Face Recognition Method Using Fourier Transform Filters Gabor and R_LDA. IJCA Spec. Issue Intell. Syst. Data Process. 2011, 18–24. [Google Scholar]
- Pang, L.; Li, N.; Zhao, L.; Shi, W.; Du, Y. Facial expression recognition based on Gabor feature and neural network. In Proceedings of the 2018 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Jinan, China, 14–17 December 2018; pp. 489–493. [Google Scholar] [CrossRef]
- Li, X.; Maybank, S.J.; Yan, S.; Tao, D.; Xu, D. Gait components and their application to gender recognition. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2008, 38, 145–155. [Google Scholar]
- Zhang, W.; Shan, S.; Gao, W.; Chen, X.; Zhang, H. Local gabor binary pattern histogram sequence (lgbphs): A novel non-statistical model for face representation and recognition. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005; Volume 1, pp. 786–791. [Google Scholar]
- Dongcheng, S.; Fang, C.; Guangyi, D. Facial expression recognition based on Gabor wavelet phase features. In Proceedings of the 2013 Seventh International Conference on Image and Graphics, Qingdao, China, 26–28 July 2013; pp. 520–523. [Google Scholar]
- Priyadharshini, R.A.; Arivazhagan, S.; Sangeetha, L. Vehicle recognition based on Gabor and Log-Gabor transforms. In Proceedings of the 2014 IEEE International Conference on Advanced Communications, Control and Computing Technologies, Ramanathapuram, India, 8–10 May 2014; pp. 1268–1272. [Google Scholar]
- Zhang, Y.; Li, W.; Zhang, L.; Ning, X.; Sun, L.; Lu, Y. Adaptive Learning Gabor Filter for Finger-Vein Recognition. IEEE Access 2019, 7, 159821–159830. [Google Scholar] [CrossRef]
- Han, R.; Zhang, L. Fabric defect detection method based on Gabor filter mask. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems, Xiamen, China, 19–21 May 2009; Volume 3, pp. 184–188. [Google Scholar]
- Rahman, M.A.; Jha, R.K.; Gupta, A.K. Gabor phase response based scheme for accurate pectoral muscle boundary detection. IET Image Proc. 2019, 13, 771–778. [Google Scholar] [CrossRef]
- Mortari, D.; De Sanctis, M.; Lucente, M. Design of flower constellations for telecommunication services. Proc. IEEE 2011, 99, 2008–2019. [Google Scholar] [CrossRef]
- Hwang, H.; Kim, D. Constellation analysis of PSK signal for diagnostic monitoring. In Proceedings of the 2012 18th Asia-Pacific Conference on Communications (APCC), Jeju, Korea, 15–17 October 2012; pp. 90–94. [Google Scholar]
- Li, L.; Wei, Z.; Guojian, T. Observability analysis of satellite constellations autonomous navigation based on X-ray pulsar measurements. In Proceedings of the 2013 Chinese Automation Congress, Changsha, China, 7–8 November 2013; pp. 148–151. [Google Scholar]
- Rowley, H.A.; Baluja, S.; Kanade, T. Neural network-based face detection. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 23–38. [Google Scholar] [CrossRef]
- Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386. [Google Scholar] [CrossRef] [PubMed]
- Steinbuch, K.; Piske, U.A. Learning matrices and their applications. IEEE Trans. Electron. Comput. 1963, EC-12, 846–862. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Broomhead, D.S.; Lowe, D. Multivariable Functional Interpolation and Adaptive Networks. Complex Syst. 1988, 2, 321–355. [Google Scholar]
- Orr, M.J. Introduction to Radial Basis Function Networks; Centre for Cognitive Science University of Edinburgh: Edinburgh, UK, 1996. [Google Scholar]
- Rowley, H.A.; Baluja, S.; Kanade, T. Rotation invariant neural network-based face detection. In Proceedings of the 1998 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No. 98CB36231), Santa Barbara, CA, USA, 25 June 1998; pp. 38–44. [Google Scholar]
- Marcos, D.; Volpi, M.; Tuia, D. Learning rotation invariant convolutional filters for texture classification. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 2012–2017. [Google Scholar]
- El-Bakry, H.M. Face detection using neural networks and image decomposition. In Proceedings of the 2002 International Joint Conference on Neural Networks, IJCNN’02 (Cat. No. 02CH37290), Honolulu, HI, USA, 12–17 May 2002; Volume 1, pp. 1045–1050. [Google Scholar]
- Huang, L.L.; Shimizu, A.; Hagihara, Y.; Kobatake, H. Face detection from cluttered images using a polynomial neural network. Neurocomputing 2003, 51, 197–211. [Google Scholar] [CrossRef]
- Ivakhnenko, A.G. The group method of data of handling; a rival of the method of stochastic approximation. Sov. Autom. Control 1968, 13, 43–55. [Google Scholar]
- Le Cun, Y.; Jackel, L.D.; Boser, B.; Denker, J.S.; Graf, H.P.; Guyon, I.; Henderson, D.; Howard, R.E.; Hubbard, W. Handwritten digit recognition: Applications of neural network chips and automatic learning. IEEE Commun. Mag. 1989, 27, 41–46. [Google Scholar] [CrossRef]
- Matsugu, M.; Mori, K.; Mitari, Y.; Kaneda, Y. Subject independent facial expression recognition with robust face detection using a convolutional neural network. Neural Networks 2003, 16, 555–559. [Google Scholar] [CrossRef]
- Kung, S.Y.; Lin, S.H.; Fang, M. A neural network approach to face/palm recognition. In Proceedings of the 1995 IEEE Workshop on Neural Networks for Signal Processing, Cambridge, MA, USA, 31 August–2 September 1995; pp. 323–332. [Google Scholar]
- Rhee, F.C.H.; Lee, C. Region based fuzzy neural networks for face detection. In Proceedings of the Joint 9th IFSA World Congress and 20th NAFIPS International Conference (Cat. No. 01TH8569), Vancouver, BC, Canada, 25–28 July 2001; Volume 2, pp. 1156–1160. [Google Scholar]
- Chandrasekhar, T. Face recognition using fuzzy neural network. Int. J. Future Revolut. Comput. Sci. Commun. Eng. 2017, 3, 101–105. [Google Scholar]
- Sirovich, L.; Kirby, M. Low-dimensional procedure for the characterization of human faces. Josa A 1987, 4, 519–524. [Google Scholar] [CrossRef] [PubMed]
- Turk, M.; Pentland, A. Face recognition using eigenfaces. In Proceedings of the 1991 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Maui, HI, USA, 3–6 June 1991; pp. 586–587. [Google Scholar]
- Moghaddam, B.; Pentland, A. Probabilistic visual learning for object detection. In Proceedings of the IEEE International Conference on Computer Vision, Cambridge, MA, USA, 20–23 June 1995; pp. 786–793. [Google Scholar]
- Midgley, J. Probabilistic Eigenspace Object Recognition in the Presence of Occlusion; National Library of Canada: Ottawa, ON, Canada, 2001. [Google Scholar]
- Belhumeur, P.N.; Hespanha, J.P.; Kriegman, D.J. Eigenfaces vs. fisherfaces: Recognition using class specific linear projection. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 711–720. [Google Scholar] [CrossRef]
- Vasilescu, M.A.O.; Terzopoulos, D. Multilinear subspace analysis of image ensembles. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; Volume 2. [Google Scholar]
- Vasilescu, M.A.O.; Terzopoulos, D. Multilinear Analysis of Image Ensembles: Tensorfaces; European Conference on Computer Vision; Springer: Copenhagen, Denmark, 2002; pp. 447–460. [Google Scholar]
- Pearson, K. LIII. On lines and planes of closest fit to systems of points in space. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1901, 2, 559–572. [Google Scholar] [CrossRef]
- Hotelling, H. Analysis of a complex of statistical variables into principal components. J. Educ. Psychol. 1933, 24, 417. [Google Scholar] [CrossRef]
- Vapnik, V. Pattern recognition using generalized portrait method. Autom. Remote Control 1963, 24, 774–780. [Google Scholar]
- Guo, G.; Li, S.Z.; Chan, K.L. Support vector machines for face recognition. Image Vision Comput. 2001, 19, 631–638. [Google Scholar] [CrossRef]
- Ahmed, N.; Natarajan, T.; Rao, K.R. Discrete cosine transform. IEEE Trans. Comput. 1974, 100, 90–93. [Google Scholar] [CrossRef]
- Chadha, A.R.; Vaidya, P.P.; Roja, M.M. Face recognition using discrete cosine transform for global and local features. In Proceedings of the 2011 International Conference On Recent Advancements in Electrical, Electronics And Control Engineering, Sivakasi, India, 15–17 December 2011; pp. 502–505. [Google Scholar]
- He, X.; Niyogi, P. Locality preserving projections. Adv. Neural Inf. Process. Syst. 2004, 16, 153–160. [Google Scholar]
- Hérault, J.; Ans, B. Réseau de neurones à synapses modifiables: Décodage de messages sensoriels composites par apprentissage non supervisé et permanent. C. R. Séances L’Académie Sci. Série Sci. Vie 1984, 299, 525–528. [Google Scholar]
- Alyasseri, Z.A.A. Face Recognition using Independent Component Analysis Algorithm. Int. J. Comput. Appl. 2015, 126. [Google Scholar]
- Ertuğrul, Ö.F.; Tekin, R.; Kaya, Y. Randomized feed-forward artificial neural networks in estimating short-term power load of a small house: A case study. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–5. [Google Scholar]
- Chaturvedi, S.; Titre, R.N.; Sondhiya, N. Review of handwritten pattern recognition of digits and special characters using feed forward neural network and Izhikevich neural model. In Proceedings of the 2014 International Conference on Electronic Systems, Signal Processing and Computing Technologies, Nagpur, India, 9–11 January 2014; pp. 425–428. [Google Scholar]
- Saikia, T.; Sarma, K.K. Multilevel-DWT based image de-noising using feed forward artificial neural network. In Proceedings of the 2014 International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 20–21 February 2014; pp. 791–794. [Google Scholar]
- Mikaeil, A.M.; Hu, W.; Hussain, S.B. A Low-Latency Traffic Estimation Based TDM-PON Mobile Front-Haul for Small Cell Cloud-RAN Employing Feed-Forward Artificial Neural Network. In Proceedings of the 2018 20th International Conference on Transparent Optical Networks (ICTON), Bucharest, Romania, 1–5 July 2018; pp. 1–4. [Google Scholar]
- Widrow, B.; Lehr, M.A. 30 years of adaptive neural networks: Perceptron, madaline, and backpropagation. Proc. IEEE 1990, 78, 1415–1442. [Google Scholar] [CrossRef]
- Linnainmaa, S. Towards accurate statistical estimation of rounding errors in floating-point computations. BIT Numer. Math. 1975, 15, 165–173. [Google Scholar] [CrossRef]
- Chanda, M.; Biswas, M. Plant disease identification and classification using Back-Propagation Neural Network with Particle Swarm Optimization. In Proceedings of the 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 23–25 April 2019; pp. 1029–1036. [Google Scholar]
- Yu, Y.; Li, Y.; Li, Y.; Wang, J.; Lin, D.; Ye, W. Tooth decay diagnosis using back propagation neural network. In Proceedings of the 2006 International Conference on Machine Learning and Cybernetics, Dalian, China, 13–16 August 2006; pp. 3956–3959. [Google Scholar]
- Dilruba, R.A.; Chowdhury, N.; Liza, F.F.; Karmakar, C.K. Data pattern recognition using neural network with back-propagation training. In Proceedings of the 2006 International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 19–21 December 2006; pp. 451–455. [Google Scholar]
- Xie, L.; Wei, R.; Hou, Y. Ship equipment fault grade assessment model based on back propagation neural network and genetic algorithm. In Proceedings of the 2008 International Conference on Management Science and Engineering 15th Annual Conference Proceedings, Long Beach, CA, USA, 10–12 September 2008; pp. 211–218. [Google Scholar]
- Jaiganesh, V.; Sumathi, P.; Mangayarkarasi, S. An analysis of intrusion detection system using back propagation neural network. In Proceedings of the 2013 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 21–22 February 2013; pp. 232–236. [Google Scholar]
- Broomhead, D.S.; Lowe, D. Radial Basis Functions, Multi-Variable Functional Interpolation and Adaptive Networks; Technical Report; Royal Signals and Radar Establishment Malvern: Worcestershire, UK, 1988. [Google Scholar]
- Aziz, K.A.A.; Abdullah, S.S. Face Detection Using Radial Basis Functions Neural Networks With Fixed Spread. arXiv 2014, arXiv:1410.2173. [Google Scholar]
- Yu, H.; Xie, T.; Paszczynski, S.; Wilamowski, B.M. Advantages of radial basis function networks for dynamic system design. IEEE Trans. Ind. Electron. 2011, 58, 5438–5450. [Google Scholar] [CrossRef]
- Kurban, T.; Beşdok, E. A comparison of RBF neural network training algorithms for inertial sensor based terrain classification. Sensors 2009, 9, 6312–6329. [Google Scholar] [CrossRef]
- Karayiannis, N.B.; Xiong, Y. Training reformulated radial basis function neural networks capable of identifying uncertainty in data classification. IEEE Trans. Neural Netw. 2006, 17, 1222–1234. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Wu, M.; Xu, M.; Geng, H.; Duan, L. Research of data mining approach based on radial basis function neural networks. In Proceedings of the 2009 Second International Symposium on Knowledge Acquisition and Modeling, Wuhan, China, 30 November–1 December 2009; Volume 2, pp. 57–61. [Google Scholar]
- Venkateswarlu, R.; Kumari, R.V.; Jayasri, G.V. Speech recognition using radial basis function neural network. In Proceedings of the 2011 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; Volume 3, pp. 441–445. [Google Scholar]
- Yang, G.; Chen, Y. The study of electrocardiograph based on radial basis function neural network. In Proceedings of the 2010 Third International Symposium on Intelligent Information Technology and Security Informatics, Jian, China, 2–4 April 2010; pp. 143–145. [Google Scholar]
- Fukumi, M.; Omatu, S.; Takeda, F.; Kosaka, T. Rotation-invariant neural pattern recognition system with application to coin recognition. IEEE Trans. Neural Netw. 1992, 3, 272–279. [Google Scholar] [CrossRef] [PubMed]
- Fukumi, M.; Omatu, S.; Nishikawa, Y. Rotation-invariant neural pattern recognition system estimating a rotation angle. IEEE Trans. Neural Netw. 1997, 8, 568–581. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.H.; Kwon, H.Y.; Hwang, H.Y. Scale and rotation invariant pattern recognition using complex-log mapping and translation invariant neural network. In Proceedings of the 1994 IEEE International Conference on Neural Networks (ICNN’94), Orlando, FL, USA, 28 June–2 July 1994; Volume 7, pp. 4306–4308. [Google Scholar]
- Ivakhnenko, A.G. Polynomial theory of complex systems. IEEE Trans. Syst. Man Cybern. 1971, SMC-1, 364–378. [Google Scholar] [CrossRef]
- Gardner, S. Polynomial neural networks for signal processing in chaotic backgrounds. In Proceedings of the IJCNN-91-Seattle International Joint Conference on Neural Networks, Seattle, WA, USA, 8–12 July 1991; Volume 2, p. 890. [Google Scholar]
- Ghazali, R.; Hussain, A.J.; Salleh, M.M. Application of polynomial neural networks to exchange rate forecasting. In Proceedings of the 2008 Eighth International Conference on Intelligent Systems Design and Applications, Kaohsuing, Taiwan, 26–28 November 2008; Volume 2, pp. 90–95. [Google Scholar]
- Zhiqi, Y. Gesture learning and recognition based on the Chebyshev polynomial neural network. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016; pp. 931–934. [Google Scholar]
- Vejian, R.; Gobbi, R.; Sahoo, N.C. Polynomial neural network based modeling of Switched Reluctance Motors. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–4. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C. Convolutional neural networks for face recognition. In Proceedings of the CVPR IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 18–20 June 1996; pp. 217–222. [Google Scholar]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C.; Back, A.D. Face recognition: A convolutional neural-network approach. IEEE Trans. Neural Netw. 1997, 8, 98–113. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Keung, J. Improving Bug Localization with Character-Level Convolutional Neural Network and Recurrent Neural Network. In Proceedings of the 2018 25th Asia-Pacific Software Engineering Conference (APSEC), Nara, Japan, 4–7 December 2018; pp. 703–704. [Google Scholar]
- Mahajan, N.V.; Deshpande, A.; Satpute, S. Prediction of Fault in Gas Chromatograph using Convolutional Neural Network. In Proceedings of the 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 23–25 April 2019; pp. 930–933. [Google Scholar]
- Hu, Z.; Lee, E.J. Human Motion Recognition Based on Improved 3-Dimensional Convolutional Neural Network. In Proceedings of the 2019 IEEE International Conference on Computation, Communication and Engineering (ICCCE), Fujian, China, 8–10 November 2019; pp. 154–156. [Google Scholar]
- Shen, W.; Wang, W. Node Identification in Wireless Network Based on Convolutional Neural Network. In Proceedings of the 2018 14th International Conference on Computational Intelligence and Security (CIS), Hangzhou, China, 16–19 November 2018; pp. 238–241. [Google Scholar]
- Shalini, K.; Ravikurnar, A.; Vineetha, R.; Aravinda, R.D.; Anand, K.M.; Soman, K. Sentiment Analysis of Indian Languages using Convolutional Neural Networks. In Proceedings of the 2018 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 4–6 January 2018; pp. 1–4. [Google Scholar]
- Kung, S.Y.; Taur, J.S. Decision-based neural networks with signal/image classification applications. IEEE Trans. Neural Netw. 1995, 6, 170–181. [Google Scholar] [CrossRef]
- Golomb, B.A.; Lawrence, D.T.; Sejnowski, T.J. Sexnet: A neural network identifies sex from human faces. In Proceedings of the NIPS Conference Advances in Neural Information Processing Systems 3, Denver, CO, USA, 26–29 November 1990; Volume 1, pp. 572–579. [Google Scholar]
- Bhattacharjee, D.; Basu, D.K.; Nasipuri, M.; Kundu, M. Human face recognition using fuzzy multilayer perceptron. Soft Comput. 2010, 14, 559–570. [Google Scholar] [CrossRef]
- Petrosino, A.; Salvi, G. A Rough Fuzzy Neural Based Approach to Face Detection. IPCV. 2010, pp. 317–323. Available online: https://www.researchgate.net/profile/Giuseppe-Salvi/publication/220809242_A_Rough_Fuzzy_Neural_Based_Approach_to_Face_Detection/links/57d1322808ae601b39a1bddf/A-Rough-Fuzzy-Neural-Based-Approach-to-Face-Detection.pdf (accessed on 10 September 2021).
- Pankaj, D.S.; Wilscy, M. Face recognition using fuzzy neural network classifier. In Proceedings of the International Conference on Parallel Distributed Computing Technologies and Applications, Tirunelveli, India, 23–25 September 2011; pp. 53–62. [Google Scholar]
- Kruse, R. Fuzzy neural network. Scholarpedia 2008, 3, 6043. [Google Scholar] [CrossRef]
- Kandel, A.; Zhang, Y.Q.; Bunke, H. A genetic fuzzy neural network for pattern recognition. In Proceedings of the 6th International Fuzzy Systems Conference, Barcelona, Spain, 5 July 1997; Volume 1, pp. 75–78. [Google Scholar]
- Imasaki, N.; Kubo, S.; Nakai, S.; Yoshitsugu, T.; Kiji, J.I.; Endo, T. Elevator group control system tuned by a fuzzy neural network applied method. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; Volume 4, pp. 1735–1740. [Google Scholar]
- Sekine, S.; Nishimura, M. Application of fuzzy neural network control to automatic train operation. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; Volume 5, pp. 39–40. [Google Scholar]
- Lin, Y.Y.; Chang, J.Y.; Lin, C.T. Identification and prediction of dynamic systems using an interactively recurrent self-evolving fuzzy neural network. IEEE Trans. Neural Netw. Learn. Syst. 2012, 24, 310–321. [Google Scholar] [CrossRef]
- Xu, L.; Meng, M.Q.H.; Wang, K. Pulse image recognition using fuzzy neural network. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 3148–3151. [Google Scholar]
- Kirby, M.; Sirovich, L. Application of the Karhunen-Loeve procedure for the characterization of human faces. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 103–108. [Google Scholar] [CrossRef]
- Islam, M.R.; Azam, M.S.; Ahmed, S. Speaker identification system using PCA & eigenface. In Proceedings of the 2009 12th International Conference on Computers and Information Technology, Dhaka, Bangladesh, 21–23 December 2009; pp. 261–266. [Google Scholar]
- Zhan, S.; Kurihara, T.; Ando, S. Facial image authentication system based on real-time 3D facial imaging by using complex-valued eigenfaces algorithm. In Proceedings of the 2006 International Workshop on Computer Architecture for Machine Perception and Sensing, Montreal, QC, Canada, 18–20 August 2006; pp. 220–225. [Google Scholar]
- Moghaddam, B.; Pentland, A. Probabilistic visual learning for object representation. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 696–710. [Google Scholar] [CrossRef]
- Weber, M. The Probabilistic Eigenspace Approach. Available online: www.vision.caltech.edu (accessed on 20 July 2020).
- Jin, S.; Lin, Y.; Wang, H. Automatic Modulation Recognition of Digital Signals Based on Fisherface. In Proceedings of the 2017 IEEE International Conference on Software Quality, Reliability and Security Companion (QRS-C), Prague, Czech Republic, 25–29 July 2017; pp. 216–220. [Google Scholar]
- Du, Y.; Lu, X.; Chen, W.; Xu, Q. Gender recognition using fisherfaces and a fuzzy iterative self-organizing technique. In Proceedings of the 2013 10th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Shenyang, China, 23–25 July 2013; pp. 196–200. [Google Scholar]
- Hegde, N.; Preetha, S.; Bhagwat, S. Facial Expression Classifier Using Better Technique: FisherFace Algorithm. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; pp. 604–610. [Google Scholar]
- Li, C.; Diao, Y.; Ma, H.; Li, Y. A statistical PCA method for face recognition. In Proceedings of the 2008 Second International Symposium on Intelligent Information Technology Application, Shanghai, China, 20–22 December 2008; Volume 3, pp. 376–380. [Google Scholar]
- Naz, F.; Hassan, S.Z.; Zahoor, A.; Tayyeb, M.; Kamal, T.; Khan, M.A.; Riaz, U. Intelligent Surveillance Camera using PCA. In Proceedings of the 2019 International Conference on Innovative Computing (ICIC), Lahore, Pakistan, 1–2 November 2019; pp. 1–5. [Google Scholar]
- Han, X. Nonnegative principal component analysis for cancer molecular pattern discovery. IEEE/ACM Trans. Comput. Biol. Bioinf. 2009, 7, 537–549. [Google Scholar]
- Ding, C. Principal component analysis of water quality monitoring data in XiaSha region. In Proceedings of the 2011 International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 24–26 June 2011; pp. 2321–2324. [Google Scholar]
- Li, B. A principal component analysis approach to noise removal for speech denoising. In Proceedings of the 2018 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), Hunan, China, 10–11 August 2018; pp. 429–432. [Google Scholar]
- Tarvainen, M.P.; Cornforth, D.J.; Jelinek, H.F. Principal component analysis of heart rate variability data in assessing cardiac autonomic neuropathy. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 6667–6670. [Google Scholar]
- Ying, W.; Yongping, Z.; Fang, X.; Jian, X. Analysis Model for Fire Accidents of Electric Bicycles Based on Principal Component Analysis. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017; Volume 1, pp. 760–762. [Google Scholar]
- Vapnik, V. A note one class of perceptrons. Autom. Remote Control 1964. Available online: https://ci.nii.ac.jp/naid/10021840590/ (accessed on 10 September 2021).
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Zhang, S.; Qiao, H. Face recognition with support vector machine. In Proceedings of the IEEE International Conference on Robotics, Intelligent Systems and Signal Processing, Changsha, China, 8–13 October 2003; Volume 2, pp. 726–730. [Google Scholar]
- Shah, P.M. Face Detection from Images Using Support Vector Machine. Master’s Thesis, San Jose State University, San Jose, CA, USA, 2012. [Google Scholar]
- Phillips, P.J. Support vector machines applied to face recognition. Adv. Neural Inf. Process. Syst. 1999, 11, 803–809. [Google Scholar]
- Li, H.; Wang, S.; Qi, F. Automatic Face Recognition by Support Vector Machines. In Combinatorial Image Analysis; Klette, R., Žunić, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 716–725. [Google Scholar]
- Kim, K.I.; Kim, J.H.; Jung, K. Face recognition using support vector machines with local correlation kernels. Int. J. Pattern Recognit. Artif. Intell. 2002, 16, 97–111. [Google Scholar] [CrossRef]
- Kumar, S.; Kar, A.; Chandra, M. SVM based adaptive Median filter design for face detection in noisy images. In Proceedings of the 2014 International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 20–21 February 2014; pp. 695–698. [Google Scholar]
- Wang, B.; Liu, Y.; Yun, J.; Liu, S. Application Research of Protein Structure Prediction Based Support Vector Machine. In Proceedings of the 2008 International Symposium on Knowledge Acquisition and Modeling, Wuhan, China, 21–22 December 2008; pp. 581–584. [Google Scholar]
- Abdullah, M.A.; Awal, M.A.; Hasan, M.K.; Rahman, M.A.; Alahe, M.A. Optimization of Daily Physical Activity Recognition with Feature Selection. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019; pp. 1–6. [Google Scholar]
- Gao, S.; Li, H. Breast cancer diagnosis based on support vector machine. In Proceedings of the 2012 2nd International Conference on Uncertainty Reasoning and Knowledge Engineering, Jalarta, Indonesia, 14–15 August 2012; pp. 240–243. [Google Scholar]
- Nasien, D.; Haron, H.; Yuhaniz, S.S. Support Vector Machine (SVM) for English handwritten character recognition. In Proceedings of the 2010 Second International Conference on Computer Engineering and Applications, Bali, Indonesia, 19–21 March 2010; Volume 1, pp. 249–252. [Google Scholar]
- Gao, M.; Tian, J.; Xia, M. Intrusion detection method based on classify support vector machine. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; Volume 2, pp. 391–394. [Google Scholar]
- Menori, M.H.; Munir, R. Blind steganalysis for digital images using support vector machine method. In Proceedings of the 2016 International Symposium on Electronics and Smart Devices (ISESD), Bandung, Indonesia, 29–30 November 2016; pp. 132–136. [Google Scholar]
- Radomir, S.; Stanković, J.T.A. Reprints from the Early Days of Information Sciences (Reminiscences of the Early Work in DCT Interview with K.R. Rao); Technical Report; Tampere International Center for Signal Processing: Tampere, Finland, 2012. [Google Scholar]
- Ahmed, N. How I came up with the discrete cosine transform. Digital Signal Process. 1991, 1, 4–5. [Google Scholar] [CrossRef]
- Hafed, Z.M.; Levine, M.D. Face recognition using the discrete cosine transform. Int. J. Comput. Vision 2001, 43, 167–188. [Google Scholar] [CrossRef]
- Tyagi, S.K.; Khanna, P. Face recognition using discrete cosine transform and nearest neighbor discriminant analysis. Int. J. Eng. Tech. 2012, 4, 311. [Google Scholar] [CrossRef][Green Version]
- Wijaya, I.G.P.S.; Husodo, A.Y.; Arimbawa, I.W.A. Real time face recognition using DCT coefficients based face descriptor. In Proceedings of the 2016 International Conference on Informatics and Computing (ICIC), Mataram, Indonesia, 28–29 October 2016; pp. 142–147. [Google Scholar]
- Ochoa-Dominguez, H.; Rao, K. Discrete Cosine Transform, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Udhayakumar, M.; Sidharth, S.; Deepak, S.; Arunkumar, M. Spectaculars face classification by using locality preserving projections. In Proceedings of the 2014 International Conference on Computer Communication and Informatics, Coimbatore, India, 3–5 January 2014; pp. 1–4. [Google Scholar]
- Cai, X.F.; Wen, G.H.; Wei, J.; Li, J. Enhanced supervised locality preserving projections for face recognition. In Proceedings of the 2011 International Conference on Machine Learning and Cybernetics, Guilin, China, 10–13 July 2011; Volume 4, pp. 1762–1766. [Google Scholar]
- Fu, M.; Zhang, D.; Kong, M.; Luo, B. Time-embedding 2d locality preserving projection for video summarization. In Proceedings of the 2008 International Conference on Cyberworlds, Hanzhou, China, 22–24 September 2008; pp. 131–135. [Google Scholar]
- Guo, J.; Gu, L.; Liu, Y.; Li, Y.; Zeng, J. Palmprint recognition based on kernel locality preserving projections. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 4, pp. 1909–1913. [Google Scholar]
- Zhao, L.; Dewen, H.; Guiyu, F. Visual tracking based on direct orthogonal locality preserving projections. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; Volume 2, pp. 113–115. [Google Scholar]
- Patel, L.; Patel, K.; Koringa, P.A.; Mitra, S.K. Scene-Change Detection using Locality Preserving Projections. In Proceedings of the 2018 IEEE Applied Signal Processing Conference (ASPCON), Kolkata, India, 7–9 December 2018; pp. 219–223. [Google Scholar]
- Li, Y.; Qin, X.; Guo, J. Fault diagnosis in industrial process based on locality preserving projections. In Proceedings of the 2010 International Conference on Intelligent System Design and Engineering Application, Changsha, China, 13–14 October 2010; Volume 1, pp. 734–737. [Google Scholar]
- Comon, P. Independent component analysis, a new concept? Signal Process. 1994, 36, 287–314. [Google Scholar] [CrossRef]
- Déniz, O.; Castrillon, M.; Hernández, M. Face Recognition Using Independent Component Analysis and Support Vector Machines. In Proceedings of the International Conference on Audio-and Video-Based Biometric Person Authentication, Halmstad, Sweden, 6–8 June 2001; pp. 59–64. [Google Scholar]
- Bartlett, M.S.; Movellan, J.R.; Sejnowski, T.J. Face recognition by independent component analysis. IEEE Trans. Neural Netw. 2002, 13, 1450–1464. [Google Scholar] [CrossRef]
- Havran, C.; Hupet, L.; Czyz, J.; Lee, J.; Vandendorpe, L.; Verleysen, M. Independent component analysis for face authentication. In Proceedings of the Knowledge-Based Intelligent Information & Engineering Systems, Crema, Italy, 16–18 September 2002; pp. 1207–1211. [Google Scholar]
- Brown, G.D.; Yamada, S.; Sejnowski, T.J. Independent component analysis at the neural cocktail party. Trends Neurosci. 2001, 24, 54–63. [Google Scholar] [CrossRef]
- Back, A.D.; Weigend, A.S. A first application of independent component analysis to extracting structure from stock returns. Int. J. Neural Syst. 1997, 8, 473–484. [Google Scholar] [CrossRef]
- Hyvärinen, A.; Oja, E. Independent component analysis: Algorithms and applications. Neural Netw. 2000, 13, 411–430. [Google Scholar] [CrossRef]
- Delorme, A.; Sejnowski, T.; Makeig, S. Enhanced detection of artifacts in EEG data using higher-order statistics and independent component analysis. Neuroimage 2007, 34, 1443–1449. [Google Scholar] [CrossRef] [PubMed]
- Rahman, F.H.; Iqbal, A.Y.M.; Newaz, S.S.; Wan, A.T.; Ahsan, M.S. Street parked vehicles based vehicular fog computing: Tcp throughput evaluation and future research direction. In Proceedings of the 2019 21st International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 17–20 February 2019; pp. 26–31. [Google Scholar]
- Rahman, F.H.; Newaz, S.S.; Au, T.W.; Suhaili, W.S.; Mahmud, M.P.; Lee, G.M. EnTruVe: ENergy and TRUst-aware Virtual Machine allocation in VEhicle fog computing for catering applications in 5G. Future Gener. Comput. Syst. 2021, 126, 196–210. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Erik and Low [3] | Yang et al. [5] | Ankit et al. [6] | Ashu et al. [4] | Sarvachan et al. [7] | Mei and Deng [8] | Minaee et al. [9] | Our Work | |
|---|---|---|---|---|---|---|---|---|
| Year | 2001 | 2002 | 2017 | 2018 | 2020 | 2020 | 2021 | 2021 |
| Detailed survey and discussion of different sub-areas | ✓ | ✓ | × | ✓ | × | × | × | ✓ |
| Branches of neural network in face detection | × | × | × | × | × | ✓ | ✓ | ✓ |
| Advantages and limitations of each algorithm | × | × | ✓ | ✓ | ✓ | × | × | ✓ |
| Review of a mixture of new old and recent face detection algorithm | × | ✓ | × | ✓ | × | × | × | ✓ |
| Comparison among different sub-branches | × | × | × | × | × | × | ✓ | ✓ |
| Implementation in other fields beside face detection | ✓ | × | × | × | × | × | × | ✓ |
| Active Shape Models | |||||
|---|---|---|---|---|---|
| Snakes [10,11,12,64] | DTM [14,15,16] | DPM [17,74,77] | PDM [19,20,21] | ||
| Similarities | Use deformation | ✓ | ✓ | ✓ | ✓ |
| Need initialization point | ✓ | ✓ | ✓ | ✓ | |
| Differences | Deformation technique | Energy minimization | PT & HT | Pictorial structure | Grey scale search strategy |
| Main pitfall | Long processing time | Sensitive to initialization position | Slow | Linear processing | |
| Low Level Analysis | |||||
|---|---|---|---|---|---|
| Motion [22,25,26,83] | Color [27,29] | Grey [31,94] | Edges [32,33,36,37,104] | ||
| Similarities | Fast | ✓ | ✓ | ✓ | ✓ |
| Highly sensitive to image with noise background | × | × | ✓ | ✓ | |
| Differences | Data process | 5D | 3D | 2D | 2D |
| Point of reference | Frame variation, contours, spatio temporal Gaussian filter, optical flow | RGB, HIS, YIQ | Shades of grey | Image brightness | |
| Feature Analysis | |||
|---|---|---|---|
| FS [38,39,40] | CA [52,53] | ||
| Similarities | Problem in getting feature positions correct | ✓ | ✓ |
| Works well on cluttered background | ✓ | ✓ | |
| Differences | Reference | Head, mouth, ears, eyes | Eyeballs, distance between eyes |
| Pre-conditions | Can handle variable illuminations and brightness | Working range 10 to 74 pixels and −30 to +30 degrees | |
| Neural Network | ||||
|---|---|---|---|---|
| ANN [167,169,207] | DBFN [175,229] | FNN [231,232] | ||
| Similarities | Use gradient for weight update | ✓ | ✓ | ✓ |
| Low error rate | ✓ | ✓ | ✓ | |
| Differences | Complex background, uncontrolled illumination | Strong tolerance | Performance degraded | High detection rate |
| Combination | Error back propagation | Perceptron like learning + hierarchical Non-linear rule | Fuzzy logic + Neural connection rule | |
| Linear Subspace Methods | |||||
|---|---|---|---|---|---|
| Eigenface [178,179,240] | Probabilistic Eigenspace [180,243] | Fisherfaces [182] | Tensorfaces [183,184] | ||
| Similarities | Works well on members of ensemble | ✓ | ✓ | ✓ | ✓ |
| Works ideally on specified frame | ✓ | ✓ | ✓ | ✓ | |
| Differences | Subspace finding | PCA | Eigenspace decomposition | LDA | N-mode SVD |
| Insensitive | Small or gradual change in face image | Rigid faces | Lighting and facial expressions | Scene, structure, illumination, viewpoint | |
| Statistical Approaches | ||||||
|---|---|---|---|---|---|---|
| PCA [185,186] | SVM [256,258] | DCT [271] | LPP [191] | ICA [282,283] | ||
| Similarities | Finds feature space | ✓ | × | × | ✓ | ✓ |
| Need pre-defined eye or feature locations | × | ✓ | ✓ | × | × | |
| Differences | Sensitive | High variance | Large data | High frequency components | Noise and outliers | Higher order data |
| Distinctiveness | Handles constrains environment well | Less prone to overfitting | Provide simpler ways to deal 3D facial distortions | Preserves local structure | Iterative | |
| Methods | Subcategory | Strength | Weakness | Performance | |
|---|---|---|---|---|---|
| Feature Based Approaches | Active Shape Model | Snakes | Easy to manipulate | Must be initialized close to the feature of interest | Good |
| Deformable Template Matching | Accommodative with any given shapes | Sensitive to initialized position | |||
| Deformable Part Model | Works good with different viewpoints and illuminations | Slow | |||
| Point Distribution Model | Provides a compact structure of face | The line of action is linear | |||
| Low Level Analysis | Motion | Face tracking | Produces false positives due to beards, glasses, etc | Better | |
| Color Information | Faster | Sensitive to luminance | |||
| Gray Information | Less complex | Less efficient | |||
| Edge | Requires minimal number of scanning | Not suitable for noisy images | |||
| Feature Analysis | Feature Searching | High detection accuracy | Sensitive to lighting conditions and rotations | Better | |
| Constellation Analysis | Handles problems of rotation and translation | Difficult to implement | |||
| Image Based Approaches | Neural Network | Artificial Neural Network | Able to work with incomplete data | Computationally expensive | Very high performance |
| Decision Based Neural Network | Provides a better understanding of structural richness | Restriction on face orientation | |||
| Fuzzy Neural Network | Higher accuracy | Requires a linguistic rules | |||
| Linear Subspace | Eigenfaces | Simple and efficient | Sensitive to scaling of the image | Good | |
| Probabilistic Eigenspaces | Handles a much higher degree of occlusion | Performs well on only rigid faces | |||
| Fisherfaces | Effective with images of various illuminations and facial expressions | Heavily depends on input data | |||
| Tensorfaces | Maps images despite the illuminations and expressions | Must be trained using properly labeled multimodal training data | |||
| Statistical Approaches | Principal Component Analysis | Performs very well in constrained environment | Scale variant | Fast | |
| Support Vector Machine | Risk of over-fitting is quite less | Works poorly with noisy image data set | |||
| Discrete Cosine Transform | Computationally less expensive | Require quantization | |||
| Locality Preserving Projection | Fast and suitable for practical applications | Sensitive to noise and outliers | |||
| Independent Component Analysis | Iterative | Shows difficulty in handling large number of data | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasan, M.K.; Ahsan, M.S.; Abdullah-Al-Mamun; Newaz, S.H.S.; Lee, G.M. Human Face Detection Techniques: A Comprehensive Review and Future Research Directions. Electronics 2021, 10, 2354. https://doi.org/10.3390/electronics10192354
Hasan MK, Ahsan MS, Abdullah-Al-Mamun, Newaz SHS, Lee GM. Human Face Detection Techniques: A Comprehensive Review and Future Research Directions. Electronics. 2021; 10(19):2354. https://doi.org/10.3390/electronics10192354
Chicago/Turabian StyleHasan, Md Khaled, Md. Shamim Ahsan, Abdullah-Al-Mamun, S. H. Shah Newaz, and Gyu Myoung Lee. 2021. "Human Face Detection Techniques: A Comprehensive Review and Future Research Directions" Electronics 10, no. 19: 2354. https://doi.org/10.3390/electronics10192354
APA StyleHasan, M. K., Ahsan, M. S., Abdullah-Al-Mamun, Newaz, S. H. S., & Lee, G. M. (2021). Human Face Detection Techniques: A Comprehensive Review and Future Research Directions. Electronics, 10(19), 2354. https://doi.org/10.3390/electronics10192354