
Development and Verification of Infrastructure-Assisted Automated Driving Functions




Abstract
:
1. Introduction
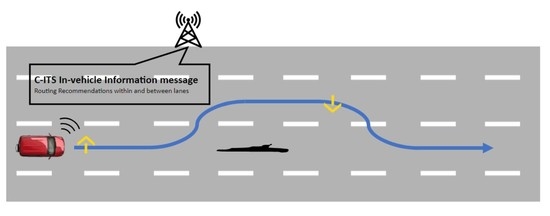
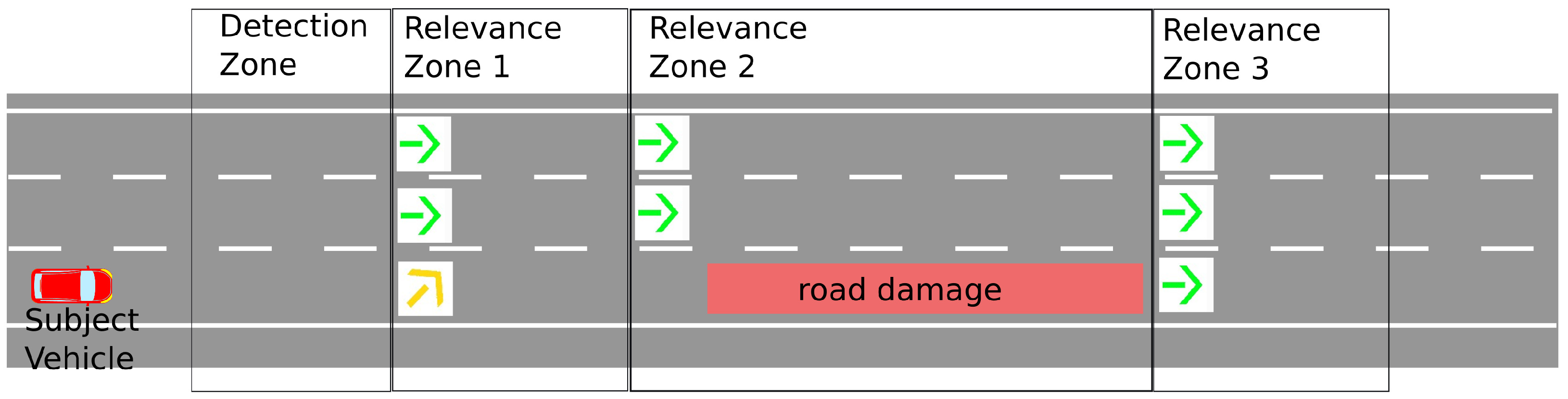
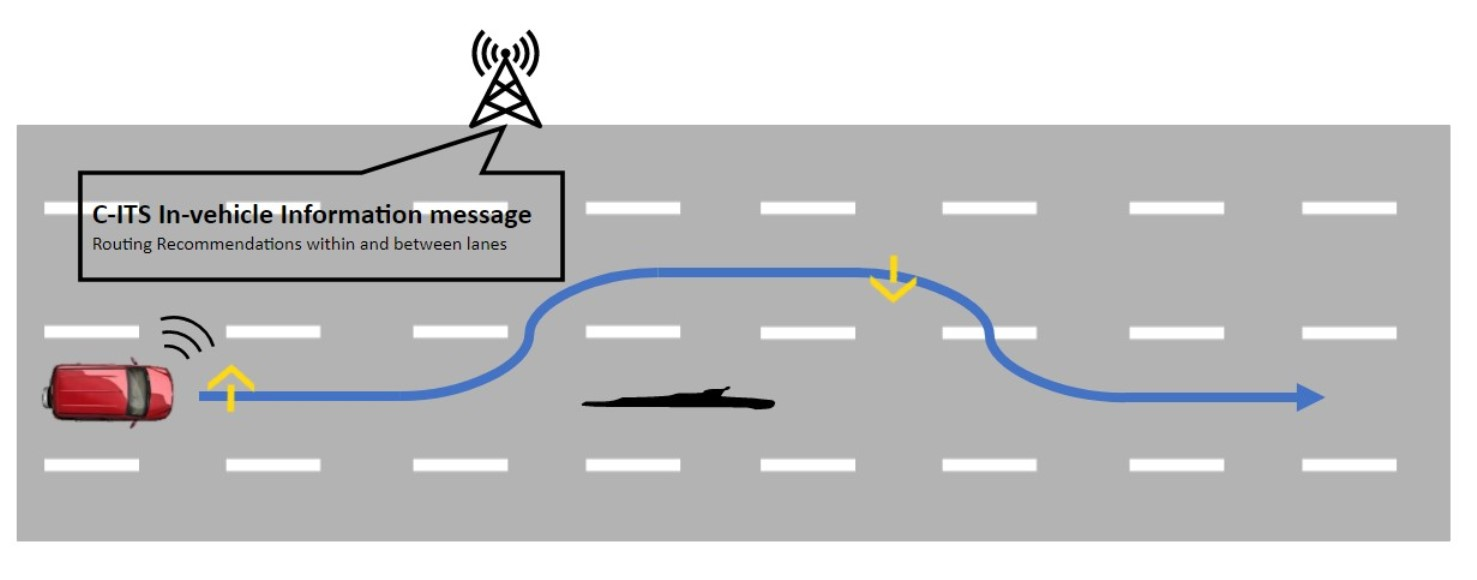
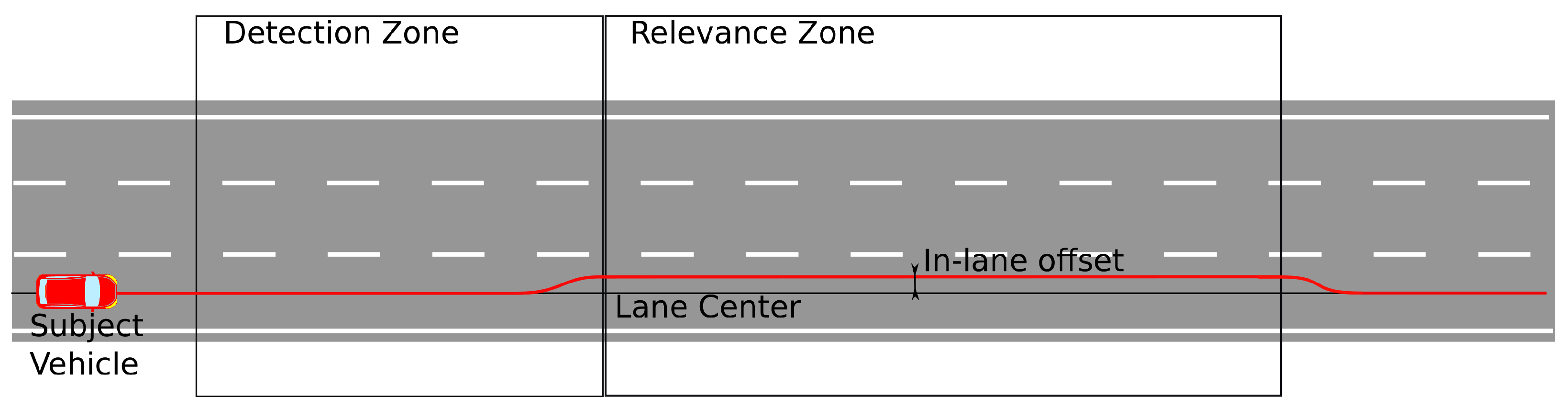
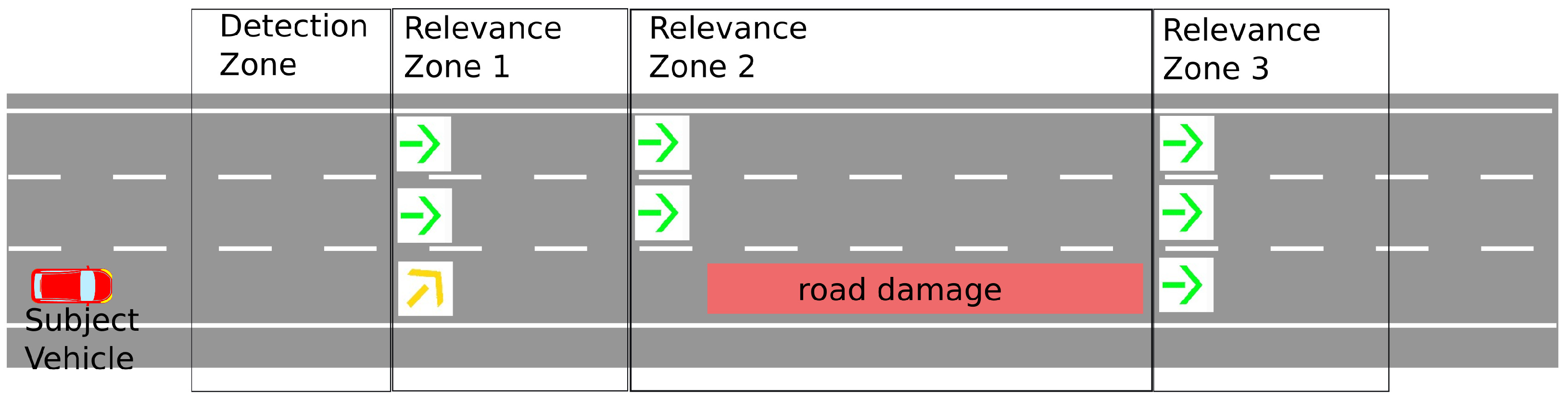
2. Descriptions of the Use Case Scenario and Performance Indicators
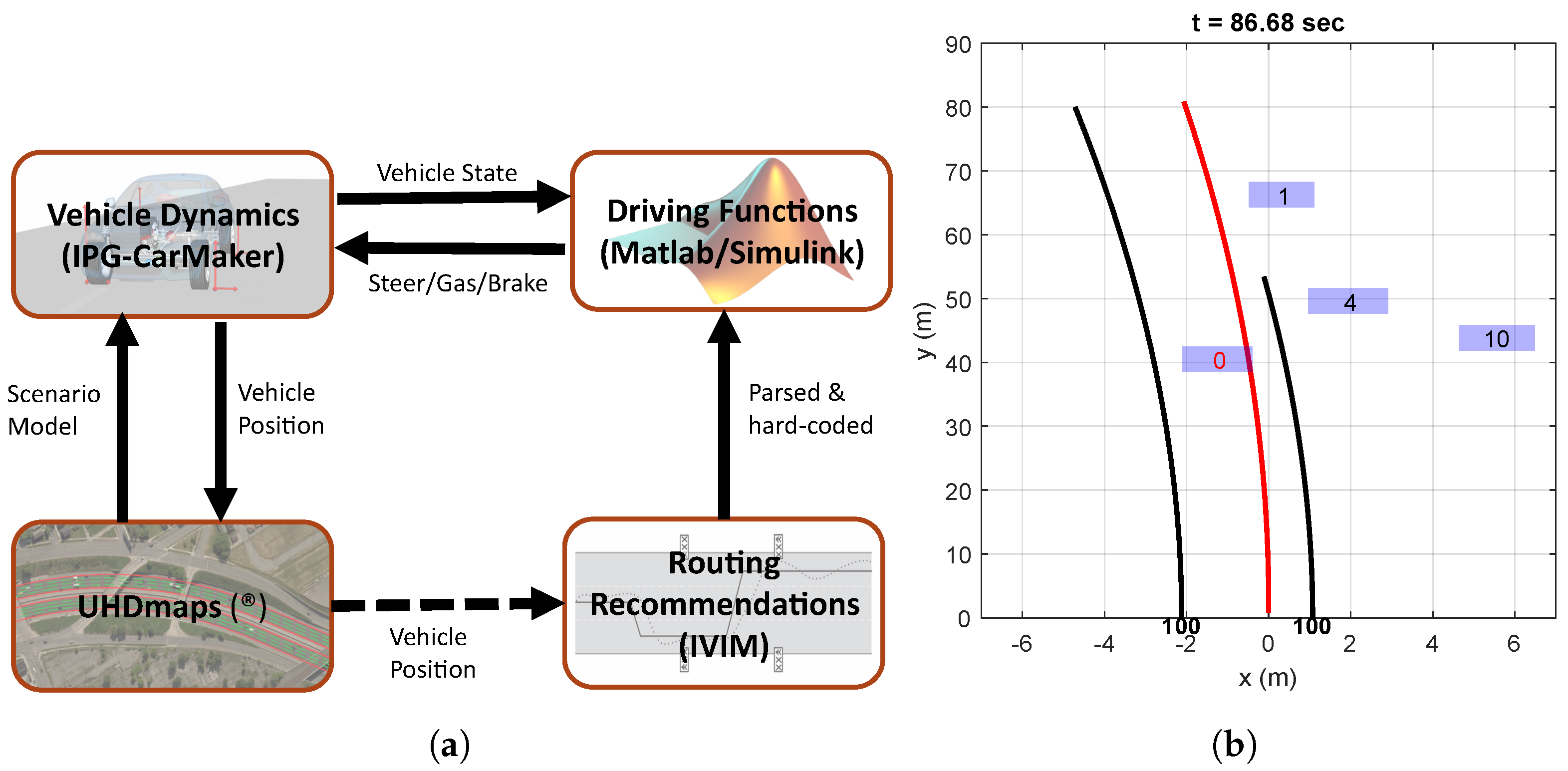
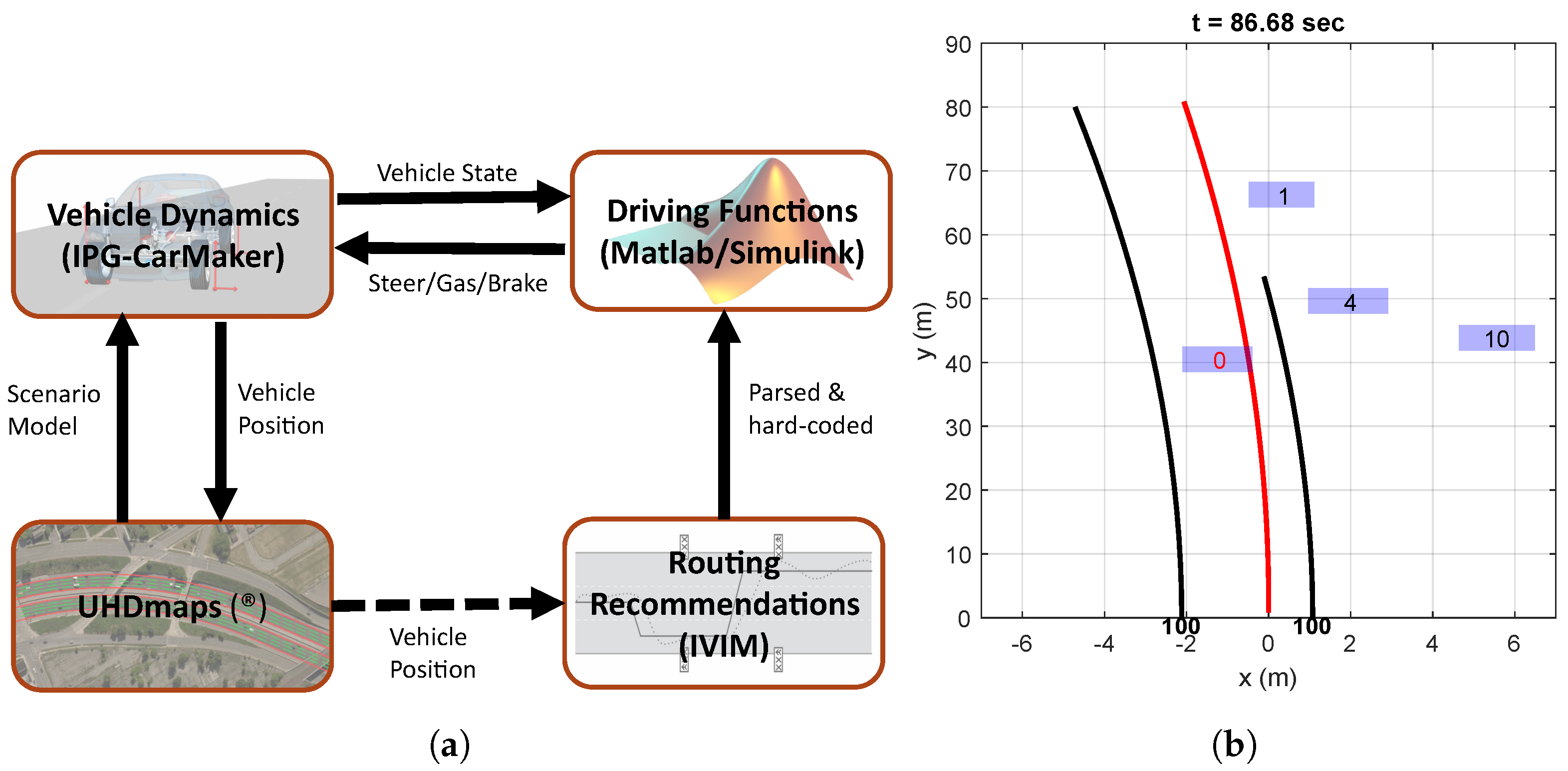
3. Simulation Environment and Setup
3.1. Driving Functions and Vehicle Dynamics
3.2. C-ITS Message Structure and Simulation Implementation
4. AD Functions Development
4.1. Planning: Rule-Based Trajectory Planner
Bézier Based Path Planning Approach
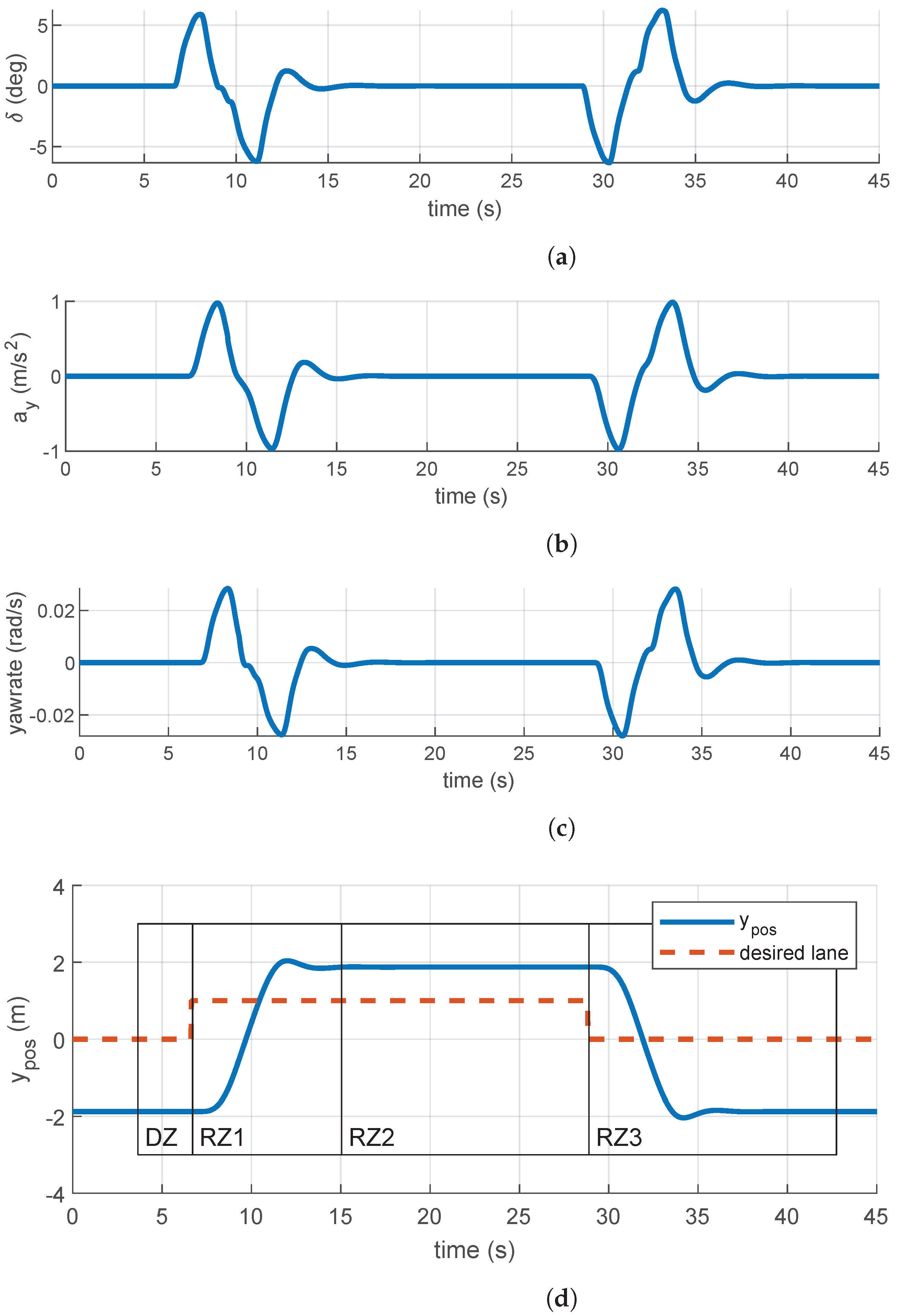
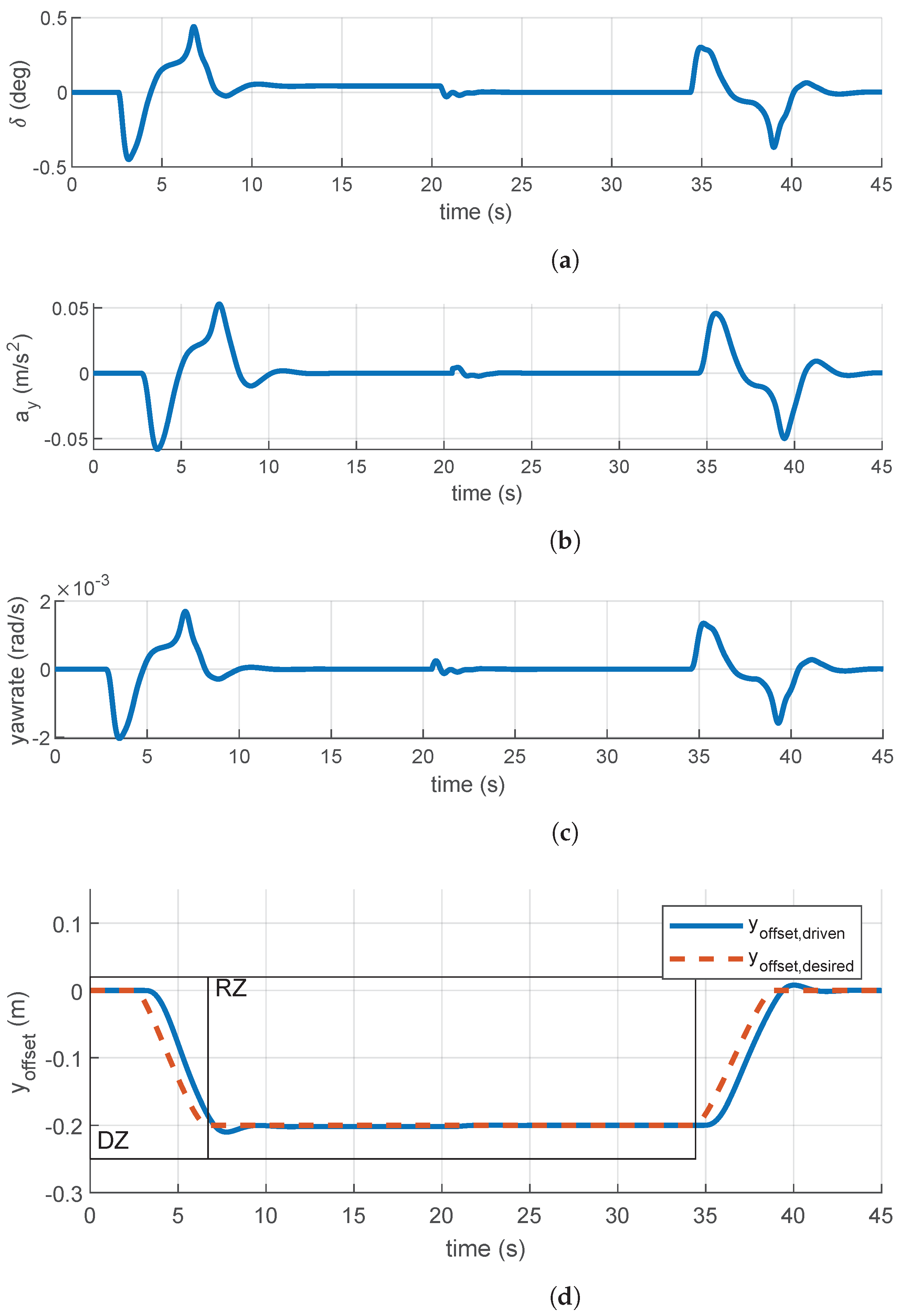
4.2. Actuation: Lateral and Longitudinal Control
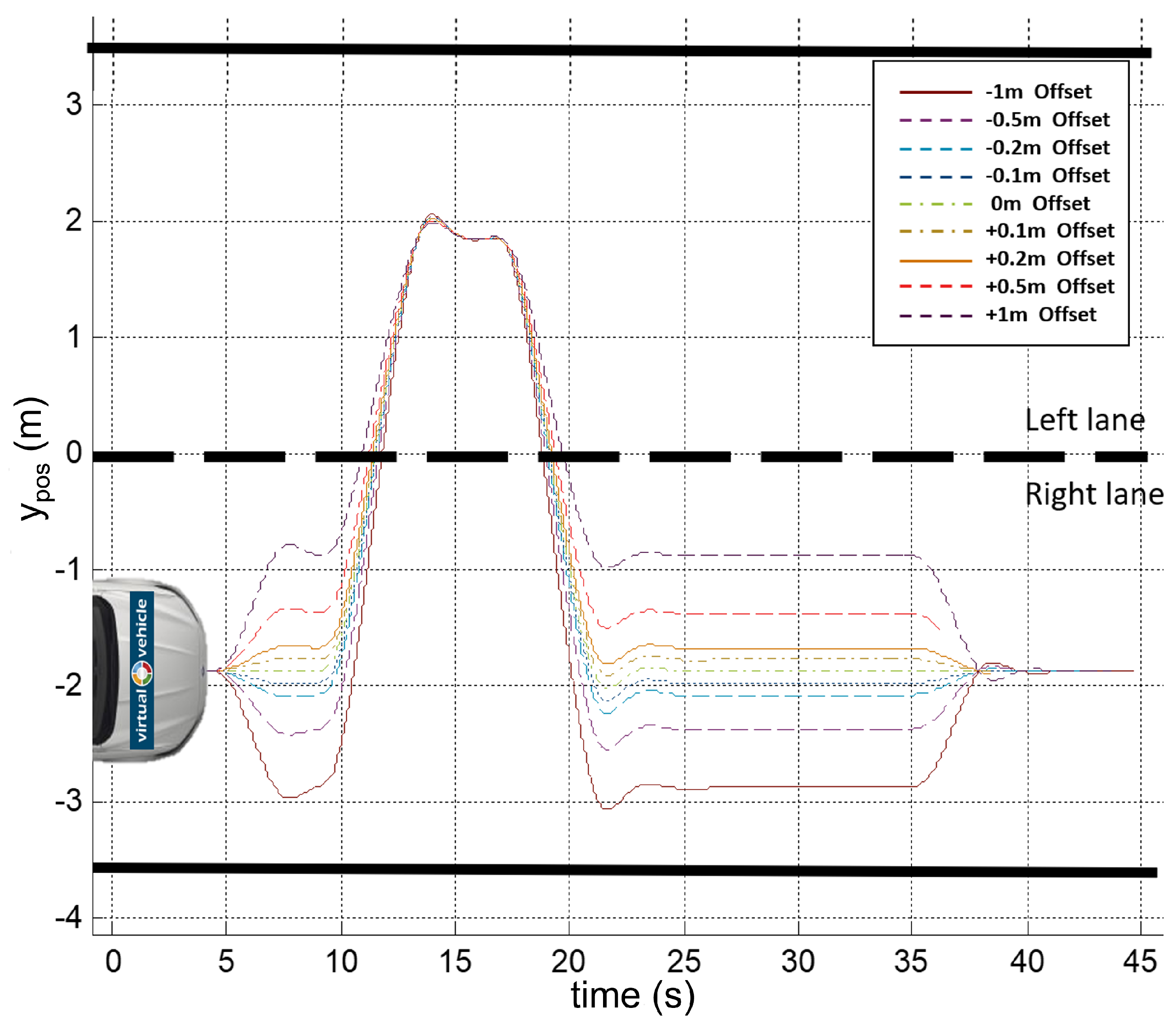
5. Simulation Results and Analysis
6. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- SAE-J3016. Surface Vehicle Recommended Practice–(R) Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; Standard SAE J3016:APR2021; Society of Automotive Engineers: Warrendale, PA, USA, 2018. [Google Scholar]
- ESRIUM. EGNSS-Enabled Smart Road Infrastructure Usage and Maintenance for Increased Energy Efficiency and Safety on European Road Networks. Available online: https://esrium.eu/ (accessed on 14 July 2021).
- Pendleton, S.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.; Rus, D.; Ang, M. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef] [Green Version]
- Bevly, D.; Cao, X.; Gordon, M.; Ozbilgin, G.; Kari, D.; Nelson, B.; Woodruff, J.; Barth, M.; Murray, C.; Kurt, A.; et al. Lane Change and Merge Maneuvers for Connected and Automated Vehicles: A Survey. IEEE Trans. Intell. Veh. 2016, 1, 105–120. [Google Scholar] [CrossRef]
- Vahidi, A.; Sciarretta, A. Energy saving potentials of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 822–843. [Google Scholar] [CrossRef]
- Berrazouane, M.; Tong, K.; Solmaz, S.; Kiers, M.; Erhart, J. Analysis and Initial Observations on Varying Penetration Rates of Automated Vehicles in Mixed Traffic Flow utilizing SUMO. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–7. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Bhoopalam, A.K.; Agatz, N.; Zuidwijk, R. Planning of truck platoons: A literature review and directions for future research. Transp. Res. Part B Methodol. 2018, 107, 212–228. [Google Scholar] [CrossRef] [Green Version]
- Tong, K.; Ajanovic, Z.; Stettinger, G. Overview of tools supporting planning for automated driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar]
- McNaughton, M.; Urmson, C.; Dolan, J.M.; Lee, J.W. Motion planning for autonomous driving with a conformal spatiotemporal lattice. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4889–4895. [Google Scholar] [CrossRef]
- Sun, K.; Schlotfeldt, B.; Chaves, S.; Martin, P.; Mandhyan, G.; Kumar, V. Feedback Enhanced Motion Planning for Autonomous Vehicles. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 2126–2133. [Google Scholar] [CrossRef]
- Hubmann, C.; Aeberhard, M.; Stiller, C. A generic driving strategy for urban environments. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1010–1016. [Google Scholar] [CrossRef]
- Zhang, T.; Fu, M.; Song, W.; Yang, Y.; Wang, M. Trajectory Planning Based on Spatio-Temporal Map with Collision Avoidance Guaranteed by Safety Strip. IEEE Trans. Intell. Transp. Syst. 2020, 1–14. [Google Scholar] [CrossRef]
- Xin, L.; Kong, Y.; Li, S.E.; Chen, J.; Guan, Y.; Tomizuka, M.; Cheng, B. Enable faster and smoother spatio-temporal trajectory planning for autonomous vehicles in constrained dynamic environment. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1101–1112. [Google Scholar] [CrossRef]
- Schäfer, L.; Manzinger, S.; Althoff, M. Computation of Solution Spaces for Optimization-based Trajectory Planning. IEEE Trans. Intell. Veh. 2021. [Google Scholar] [CrossRef]
- Gungor, O.E. A Literature Review on Wheel Wander; Technical Report; Illinois Asphalt Pavement Association: Springfield, MO, USA, 2018. [Google Scholar]
- Gungor, O.E.; Al-Qadi, I.L. All for one: Centralized optimization of truck platoons to improve roadway infrastructure sustainability. Transp. Res. Part C Emerg. Technol. 2020, 114, 84–98. [Google Scholar] [CrossRef]
- el Bouchihati, M. The Impact of Truck Platooning on the Pavement Structure of Dutch Motorways. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar]
- ISO. ISO/TS 19321:2020 Intelligent Transport Systems—Cooperative ITS—Dictionary of In-Vehicle Information (IVI) Data Structures; ISO: Geneva, Switzerland, 2020. [Google Scholar]
- Tihanyi, V.; Tettamanti, T.; Csonthó, M.; Eichberger, A.; Ficzere, D.; Gangel, K.; Hörmann, L.B.; Klaffenböck, M.A.; Knauder, C.; Luley, P.; et al. Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies. Sensors 2021, 21, 2169. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.W.; Curry, R.; Elkaim, G. Path Planning Based on Bézier Curve for Autonomous Ground Vehicles. In Proceedings of the Advances in Electrical and Electronics Engineering—IAENG Special Edition of the World Congress on Engineering and Computer Science 2008, San Francisco, CA, USA, 22–24 October 2008; pp. 158–166. [Google Scholar] [CrossRef]
- Nestlinger, G.; Stolz, M. Bumpless Transfer for Convenient Lateral Car Control Handover. IFAC-PapersOnLine 2016, 49, 132–138. [Google Scholar] [CrossRef]
- Solmaz, S.; Nestlinger, G.; Stettinger, G. Compensation of Sensor and Actuator Imperfections for Lane-Keeping Control Using a Kalman Filter Predictor. SAE Int. J. Connect. Autom. Veh. 2021, 4, 97–106. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recommendation | ISO14823 Code | Pictogram |
|---|---|---|
| Keep the current lane | 13,660 |  |
| Move to the left lane | 13,661 |  |
| Move to the right lane | 13,662 |  |
| Lane closed | 13,669 |  |
| AV-Container Part | Detection-Zone Ids | Relevance-Zone Ids | Applicable Lane | ±Offset [cm] |
|---|---|---|---|---|
| 1 | 1 | 11 | 1 | −20 |
| 2 | 1 | 13 | 2 | 10 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rudigier, M.; Nestlinger, G.; Tong, K.; Solmaz, S. Development and Verification of Infrastructure-Assisted Automated Driving Functions. Electronics 2021, 10, 2161. https://doi.org/10.3390/electronics10172161
Rudigier M, Nestlinger G, Tong K, Solmaz S. Development and Verification of Infrastructure-Assisted Automated Driving Functions. Electronics. 2021; 10(17):2161. https://doi.org/10.3390/electronics10172161
Chicago/Turabian StyleRudigier, Martin, Georg Nestlinger, Kailin Tong, and Selim Solmaz. 2021. "Development and Verification of Infrastructure-Assisted Automated Driving Functions" Electronics 10, no. 17: 2161. https://doi.org/10.3390/electronics10172161
APA StyleRudigier, M., Nestlinger, G., Tong, K., & Solmaz, S. (2021). Development and Verification of Infrastructure-Assisted Automated Driving Functions. Electronics, 10(17), 2161. https://doi.org/10.3390/electronics10172161