1. Introduction
Autonomous vehicles always remain an interesting research topic thanks to their numerous advantages, including collision avoidance and fuel consumption reduction capabilities, satisfying traffic safety and environmental objectives.
There has been a considerable amount of research work conducted on either cruise or suspension control of autonomous vehicles. Cruise control refers to the control of the vehicle speed, which is related to longitudinal dynamics, for multiple purposes such as collision avoidance [
1,
2]. For this, different control strategies (optimal, robust, linear parameter-varying (LPV), etc.) have been proposed [
3,
4,
5,
6,
7]. Recently, cruise control has been linked to a comfort objective [
8,
9,
10], which extends the field to the coordination between longitudinal and vertical controllers.
Indeed, the suspension system is a key subsystem that allows us to improve the driving comfort and road-holding performance of the vehicle [
11,
12]. This is thanks to its remarkable ability to limit the vertical oscillations of the vehicle body caused by road displacements at the four wheels. From recent years, it is known that the semi-active suspension system provides better performance than the passive one while being less energy-consuming than the active one [
12]. Existing work on semi-active suspension control includes model predictive control or state feedback with various observers, from robust, LPV, to unified ones [
11,
12,
13,
14,
15].
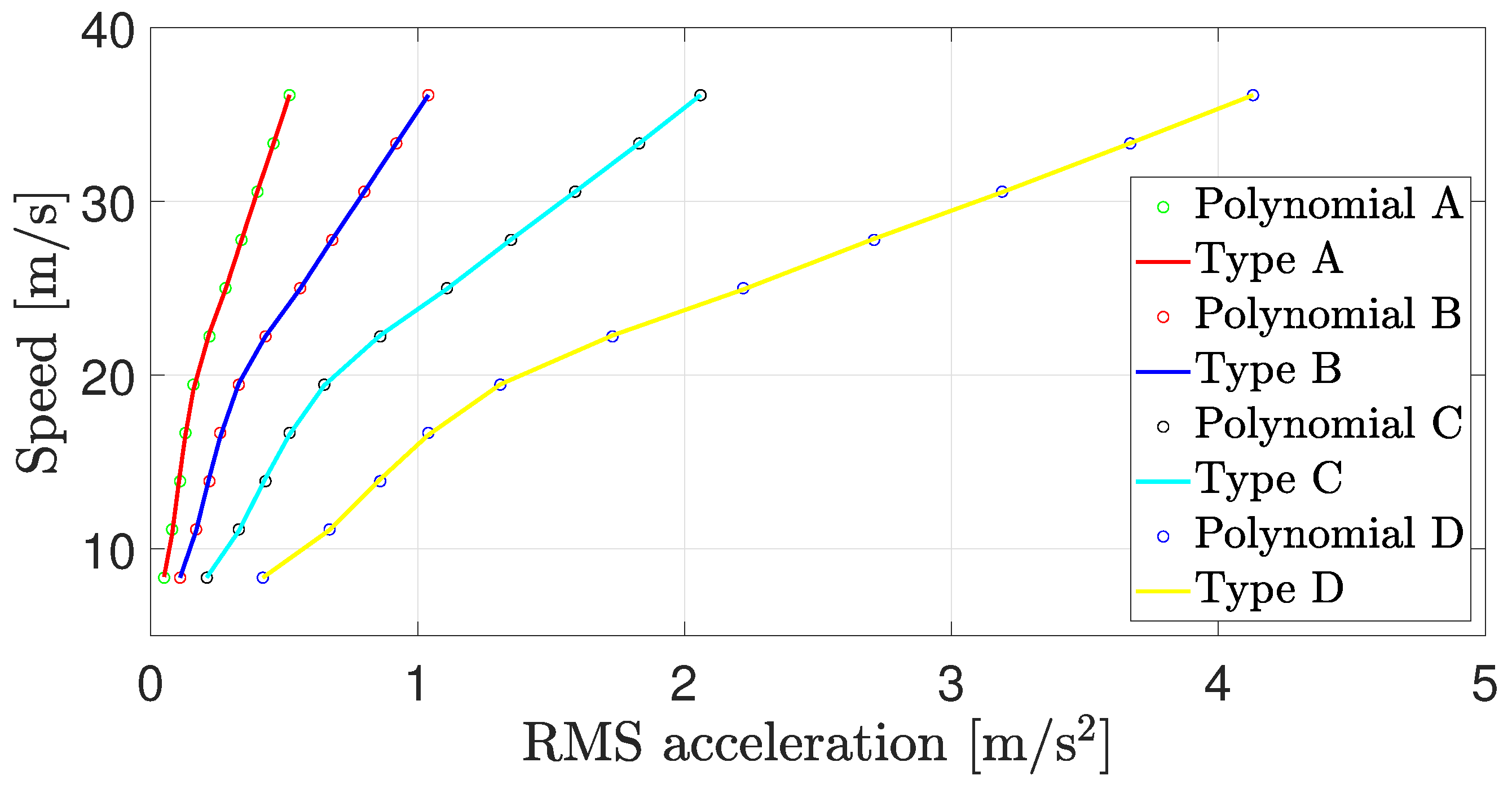
However, there has not been much work combining cruise and suspension control into an integrated problem, considering their interaction. Besides, very few studies do consider the driving comfort level in a cruise control problem. To improve driving comfort, a potential strategy is to relate the speeds at which the vehicle should travel to the desired comfort level and w.r.t specific road profiles. Such speed values are determined using criteria formed by examining the human body, including which range of frequency is most absorbed by humans. Our group has conducted a study [
16] into relating the vehicle speed with the comfort level measured using the ISO 2631 standard [
17] and the international roughness index (IRI) [
18] for each road type from A to D (defined in [
19]). Recent research about road profile estimation using adaptive observers allows us to detect which road type the vehicle is traveling on [
20], thus enabling this strategy.
The purpose of this paper is to bring further results and to introduce a comfort-oriented strategy of the integrated cruise–suspension control of an autonomous vehicle. There has been some existing work combining these problems [
9,
21]. In the latter, the coupling between longitudinal and vertical motions is considered but not the comfort objective. The work [
9] requires too many assumptions and much information from the environment (therefore being challenging to embed in reality). Therefore, this work proposes a more realistic approach, handling unknown inputs using a robust LPV control approach. We analyze both longitudinal and vertical dynamics and their interaction through the road displacement at each of the four wheels. The
condition is used as it is suited for the type of noise we are faced with in this suspension control case where one of the sensors is an accelerometer. For cases where the variation of a specific parameter(s) significantly affects the system, we model the parameter(s) into an LPV problem, which is solved as a set of linear matrix inequalities (LMIs). We also show how driving comfort is evaluated by measuring the vertical acceleration transmitted to passengers, from which we propose a way to relate the current speed to comfort level using the ISO 2631 standard. This allows us to determine which speed the vehicle should travel at in order to guarantee that the acceleration felt by one passenger does not exceed a predefined value. Combining the cruise and suspension controllers with a comfort-oriented reference speed generation algorithm leads to the proposed integrated comfort-oriented vehicle control. The integrated control scheme is then tested using simulations on a realistic nonlinear vehicle model validated from experimental data.
This paper is organized as follows. In
Section 2, we present the vehicle longitudinal and vertical dynamics (quarter-car model) then the integrated dynamics model. The general scheme of the strategy is presented in
Section 3, which consists of comfort-guaranteeing speed calculation (described in detail in
Section 4) and integrated cruise–suspension control (discussed in
Section 5). Finally, simulation results are presented in
Section 6, which shows the effectiveness of our strategy.
2. Vehicle Dynamics Modeling
This section introduces and discusses the vehicle longitudinal and vertical dynamics considered in this paper. The integrated full-vehicle model is also briefly presented.
2.1. Longitudinal Dynamics
In this part, we present the vehicle longitudinal dynamics and the corresponding system’s LPV state-space representation. First, let us make some assumptions for the longitudinal dynamics system:
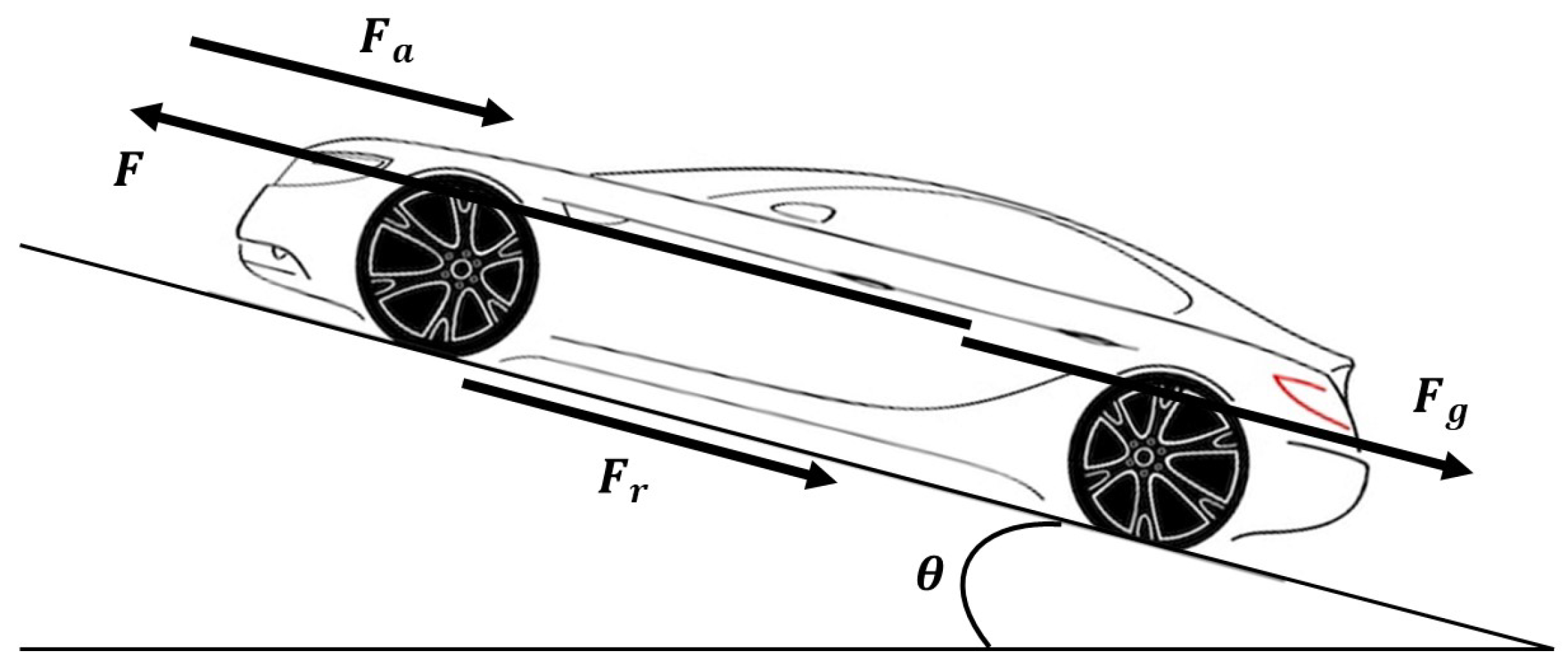
Suppose we have a vehicle of mass
m traveling at the speed of
v, as shown in
Figure 1. Let
F be the longitudinal control force on the vehicle, and
the total disturbance force.
We have the following equation of motion [
3]:
The disturbance force
consists of three components: The rolling friction supposed to have a constant value, the drag by gravity supposing the road slope
to be sufficiently small (between
which is a realistic assumption for real roads), and the aerodynamic drag that adds nonlinearity to the system, respectively:
where
is the rolling friction coefficient,
is the aerodynamic drag coefficient,
is the air’s density, and
S denotes the vehicle’s frontal area. The disturbance force thus has the following equation:
Finally, the vehicle’s motion equation is formulated as:
The input force
F is composed of two parts:
where
is the feed-forward term that compensates for the rolling friction and the road slope and
is the feedback term of the longitudinal control force. Here
is an estimated nominal value for
(constant) and
is the road slope estimated in real time by the methods in [
22,
23,
24]. As this compensation is inexact, i.e.,
and
, all the uncertainty is modeled by
, where
is a constant bound and
is white noise (
).
The system is then written in the LPV form, with
being the state variable,
being the cruise control input,
being the measured output, and
being the varying parameter of the longitudinal control case, as:
where:
Vehicle longitudinal dynamics parameters are given in
Table 1.
2.2. Vertical Dynamics
The suspension control design is carried out using the quarter-car suspension system [
11]. Indeed, this model is simple enough to catch the comfort objective w.r.t the bounce motion and to cope with the requirements about reducing the complexity of an embedded controller. For pitch/roll control, a full-vehicle model would be needed, which is not the case here.
We use the quarter-car model with a semi-active magneto-rheological (MR) suspension system to model the vehicle vertical dynamics, as shown in
Figure 2. This consists of the sprung mass
, the unsprung mass
, and the suspension components positioned between them, including a spring element with stiffness
and the damper part. Let us denote
and
as the sprung and unsprung mass’ displacement, respectively.
From Newton’s second law of motion, we obtain:
where
is the spring force and
is the tire force.
Concerning the damper force , two models are considered:
A control-oriented model as given below:
where
is the control input;
A simulation model as given below and shown in
Figure 3:
where
,
,
, and
are constant parameters and
I is the applied current. In order to design the controller, the controlled part in (
11) is defined as
.
In
Figure 3, the considered MR damper force – deflection velocity (
) characteristic is shown, from the MR damper available at ITESM, Mexico (refer to [
25]).
The model in (
10) is used to design the controller. Then, the nonlinear model (
11) is used as the inverse model to simulate the suspension controlled system for the full car model presented later.
Remark 1: The controller to be designed in this paper is applied to the semi-active suspension system using the clipped strategy as used in [
26]. Then, the control input current to be applied to the MR damper is computed from the clipped controlled damper force and given the deflection (
) and the deflection velocity
.
To link with longitudinal dynamics, we here consider benefiting from some knowledge of the road displacement input model
, which is related to the current vehicle speed according to [
27] as:
where
is white noise, and
a and
b are coefficients that depend on the road type according to International Organization for Standardization (ISO) classification [
19].
Remark 2: Using a road profile model is indeed possible since the information on the type of road profile may be obtained using some adaptive road profile estimator, as proposed in [
20], or a frequency-wise approach [
27].
From (
9) and (
12), by selecting the system states as
, the measured variables
, the control input
, and by choosing the scheduling variable
to link with longitudinal dynamics, the extended quarter-car system can be written in the LPV form as:
where:
where
. In this work, the coefficients
a and
b are consistent with those of a road profile of type B in [
19].
Vehicle vertical dynamics parameters are given in
Table 2.
2.3. Full-Vehicle Dynamics
In this paper, the full-vehicle model presented in [
28,
29] is used for simulation and validation purposes. This model and its parameters have been validated on a real Renault Megane vehicle (thanks to M. Basset, from the MIAM research team). For illustration, the model is presented in
Figure 4, but interested readers should refer to [
28] for more details.
Note that the main interest in using the full nonlinear vehicle model is that it allows us to consider a nonlinear load transfer, fast nonlinear dynamics entering the tire force description, and consequently, in the global chassis dynamic. It reproduces the longitudinal (x), lateral (y), vertical (z), roll (), pitch (), and yaw () dynamics of the chassis. It also models the vertical and rotational motions of the wheels ( and respectively), the slip ratios (), and the center of gravity side slip angle () dynamics, as a function of the tires and suspensions forces.
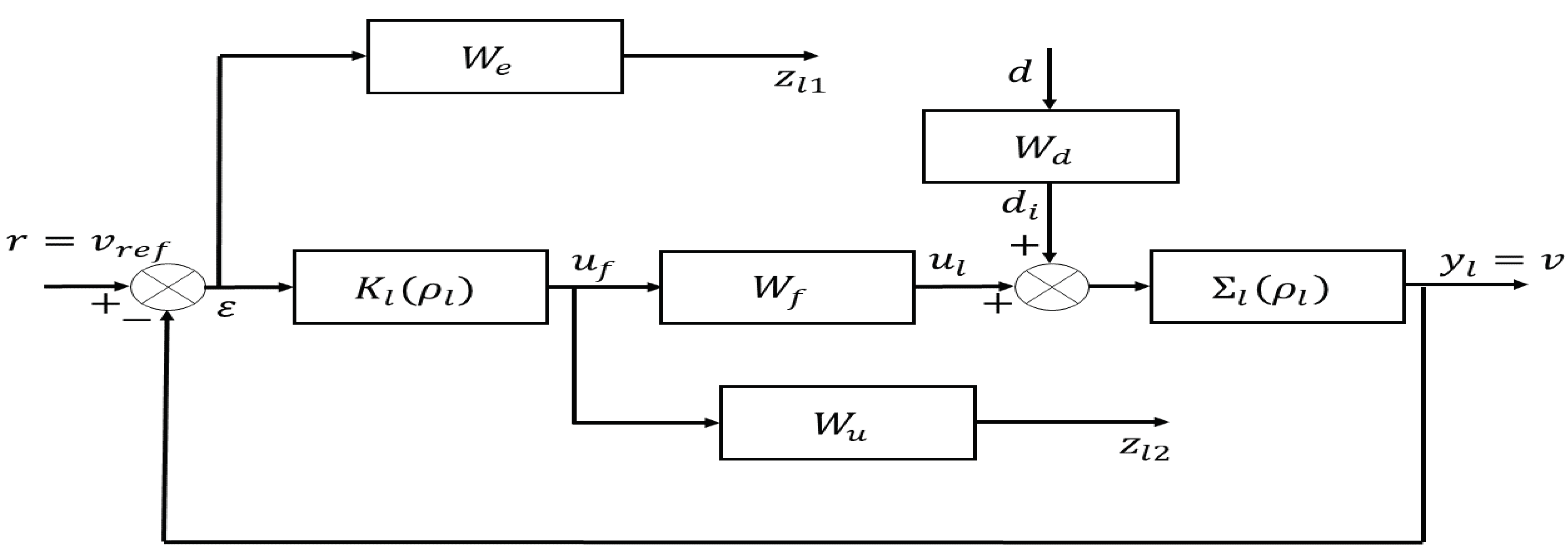
3. Integrated Cruise—Suspension LPV Control of an Autonomous Vehicle for Comfort: Structure and Objectives
The proposed strategy is illustrated in
Figure 5.
Our strategy consists of three main parts closely connected to each other and the full-vehicle dynamics. Note that the vehicle speed connects the longitudinal and vertical dynamics due to the relationship (
12).
The road type is assumed to be known/estimated in real time thanks to algorithms such as in [
20]. This is the condition that enables the making of the proposed reference speed generation strategy, which gives us suitable speed values based on the road profile and comfort objective. In the reference speed calculation part, given the estimated road type and the desired comfort level specified by the driver/passenger(s), a suitable reference speed value is determined so as to guarantee this level. How we quantify driving comfort and calculate the reference speed is presented in
Section 4.
In the cruise control part, given the calculated reference speed value, the cruise controller drives the vehicle speed to track this value. This uses not only the feedback measured by the speedometer but also road information such as road slope in order to compensate for this, providing a smoother response. How we design this part is discussed in
Section 5.2.
In the semi-active suspension control design method, a semi-active suspension control strategy is used to further improve driving comfort. How we design this part is discussed in
Section 5.3.
Combining the three mentioned parts constitutes what we propose in this paper as the integrated cruise–suspension control of an autonomous vehicle with a comfort objective.
6. Simulation of the Integrated Control Strategy
In this part, we perform simulations using the full-vehicle model presented in [
29], following the scheme presented in
Figure 17. It should be noted that the parameters used for simulations are chosen according to a real Megane vehicle. Because of this, the speed is limited to 10–35 m/s. This vehicle is equipped with four independent semi-active suspension systems controlled with a sampling period of 0.005 s. Since we perform simulations with a full-vehicle model, there is a varying time delay of
(where
L is the distance between the front and rear wheels, i.e.,
in
Figure 4) in the road profile
at the rear wheels compared to the front wheels. Driving comfort is evaluated using the RMS value of the acceleration at the vehicle’s center filtered by (
14). We combine the two control strategies into an integrative case where the reference speed varies according to the road type and the desired comfort level to guarantee driving comfort. In this part, we perform simulations with various road types and desired RMS acceleration values to test the reference speed generation and integrated cruise-suspension vehicle control strategies.
6.1. Simulation Scenario 1
The road profile inputs are chosen according to the road model (
12) for the given road types, where the input is white noise. The total simulation time is 54 s. The simulation scenario is as follows (see
Figure 18 and
Figure 19):
At 18 s (around 550 m), the desired comfort level (characterized by the given RMS acceleration) decreases from 0.4 to 0.3 m/s;
At 36 s (around 1000 m), the road type (characterized by the estimated road roughness) changes from A to B.
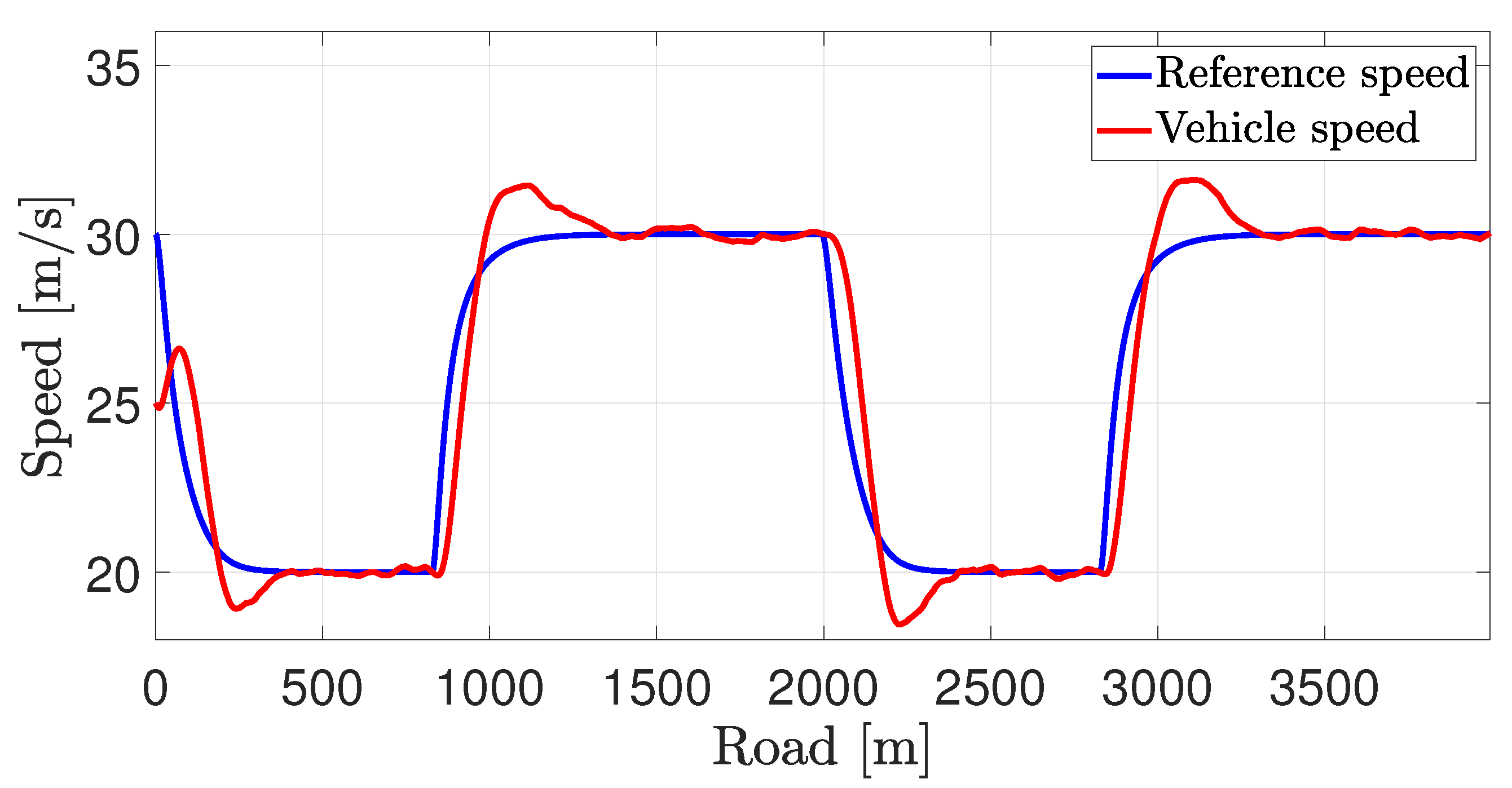
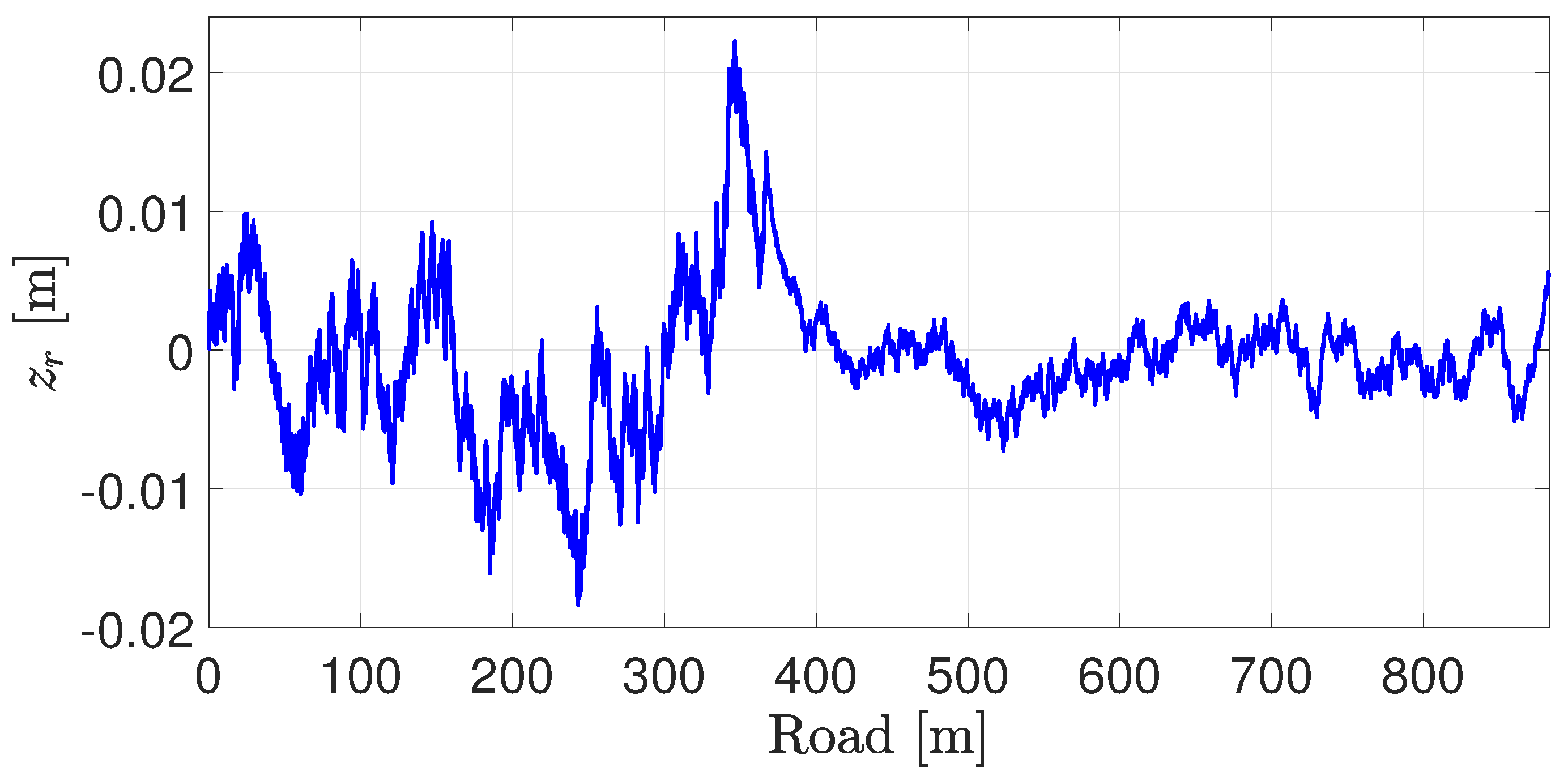
We see from
Figure 20 that each time the road type or the desired RMS value changes, a new reference speed is calculated, and the cruise control effectively tracks this value. The resulting road displacement
significantly increases after 36 s (around 1000 m) due to the change in road type (only the displacement at the front right corner of the vehicle is shown in
Figure 21).
The resulting accelerations are shown in
Figure 22, whose RMS values are
m/s
for the passive suspension case and
m/s
for the LPV
semi-active suspension case, which correspond to the comfort level of “uncomfortable” and “a little uncomfortable”, respectively, according to
Table 3. These results show that the latter further improves driving comfort by limiting the acceleration transmitted to passengers. Finally, the resulting deflections are shown in
Figure 23, from which we can see that semi-active suspension leads to smaller deflection values compared to passive suspension.
6.2. Simulation Scenario 2
The second simulation scenario is used to assess the robustness of the proposed approach w.r.t uncertainty on the sprung mass and viscous damping coefficients at the corners. This scenario is designed by adding the following uncertainty into the first one. The uncertain parameters are shown in
Table 5.
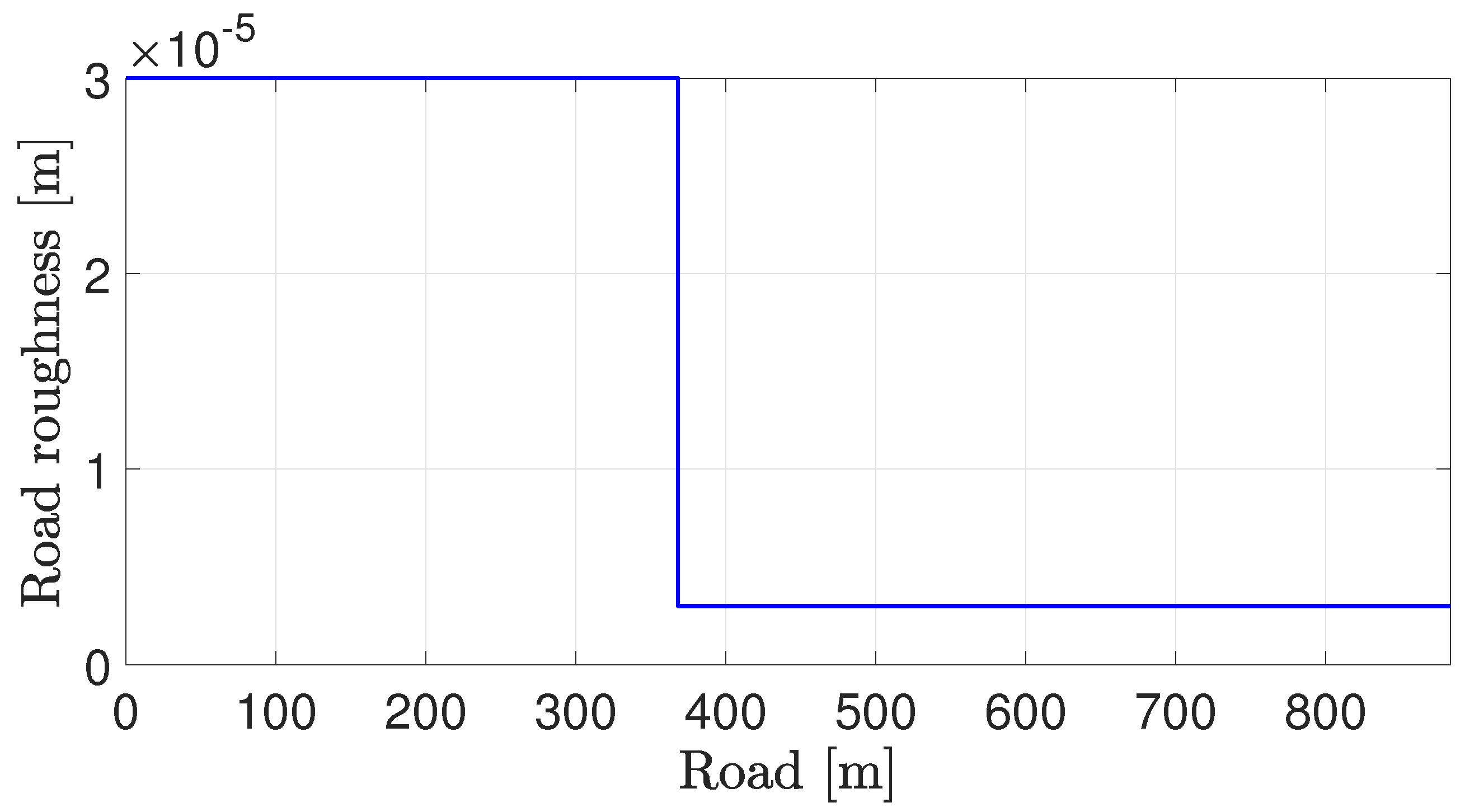
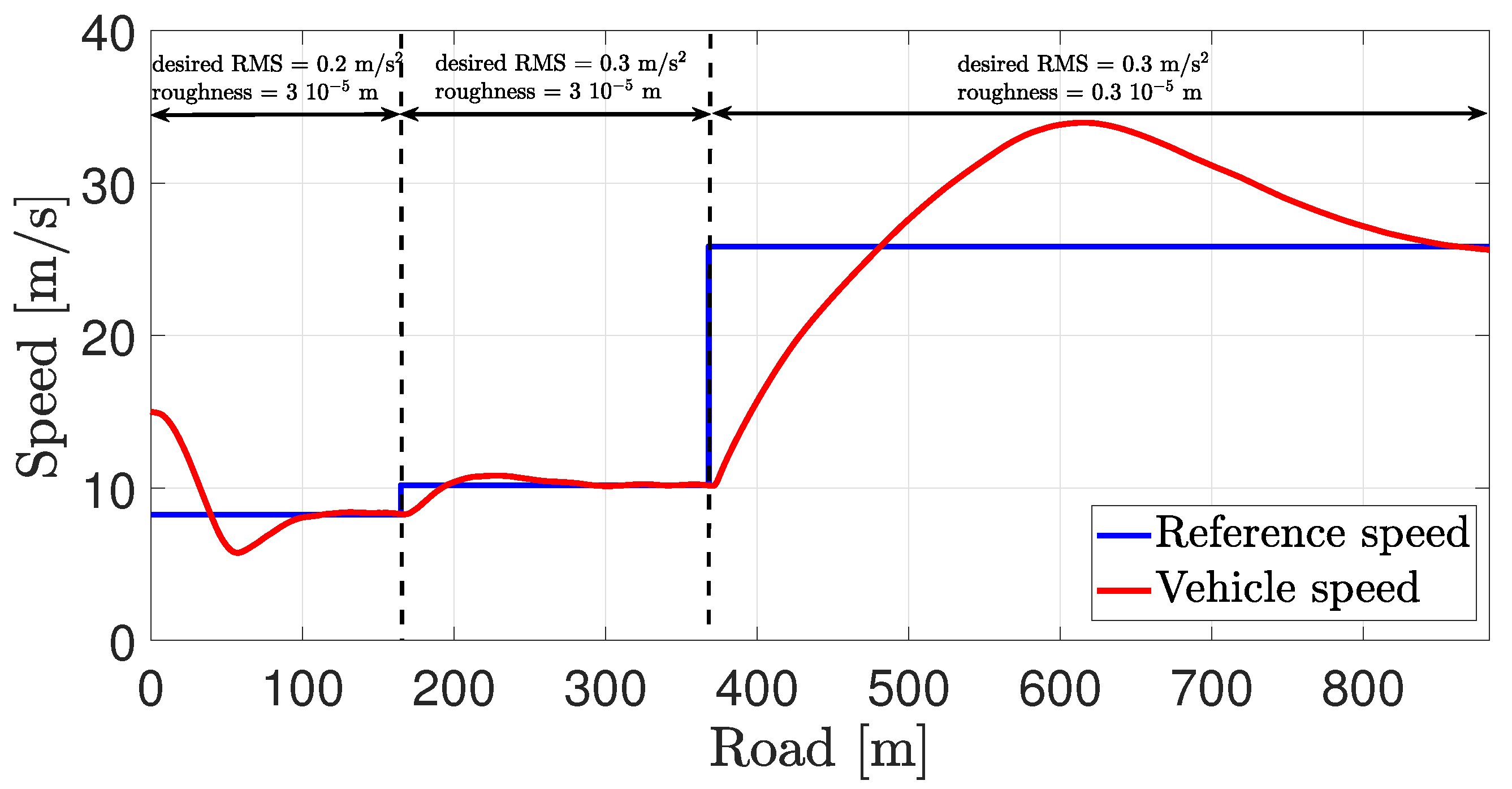
The total simulation time is 60 s. The simulation scenario is as follows (see
Figure 24 and
Figure 25):
At 20 s (around 160 m), the desired comfort level (characterized by the given RMS acceleration) increases from 0.2 to 0.3 m/s;
At 40 s (around 360 m), the road type (characterized by the estimated road roughness) changes from B to A.
Again, we see from
Figure 26 that the new reference speed is calculated, and the cruise control effectively tracks this value. The resulting road displacement
significantly decreases after 40 s (around 360 m) due to the change in road type (only the displacement at the front right corner of the vehicle is shown in
Figure 27).
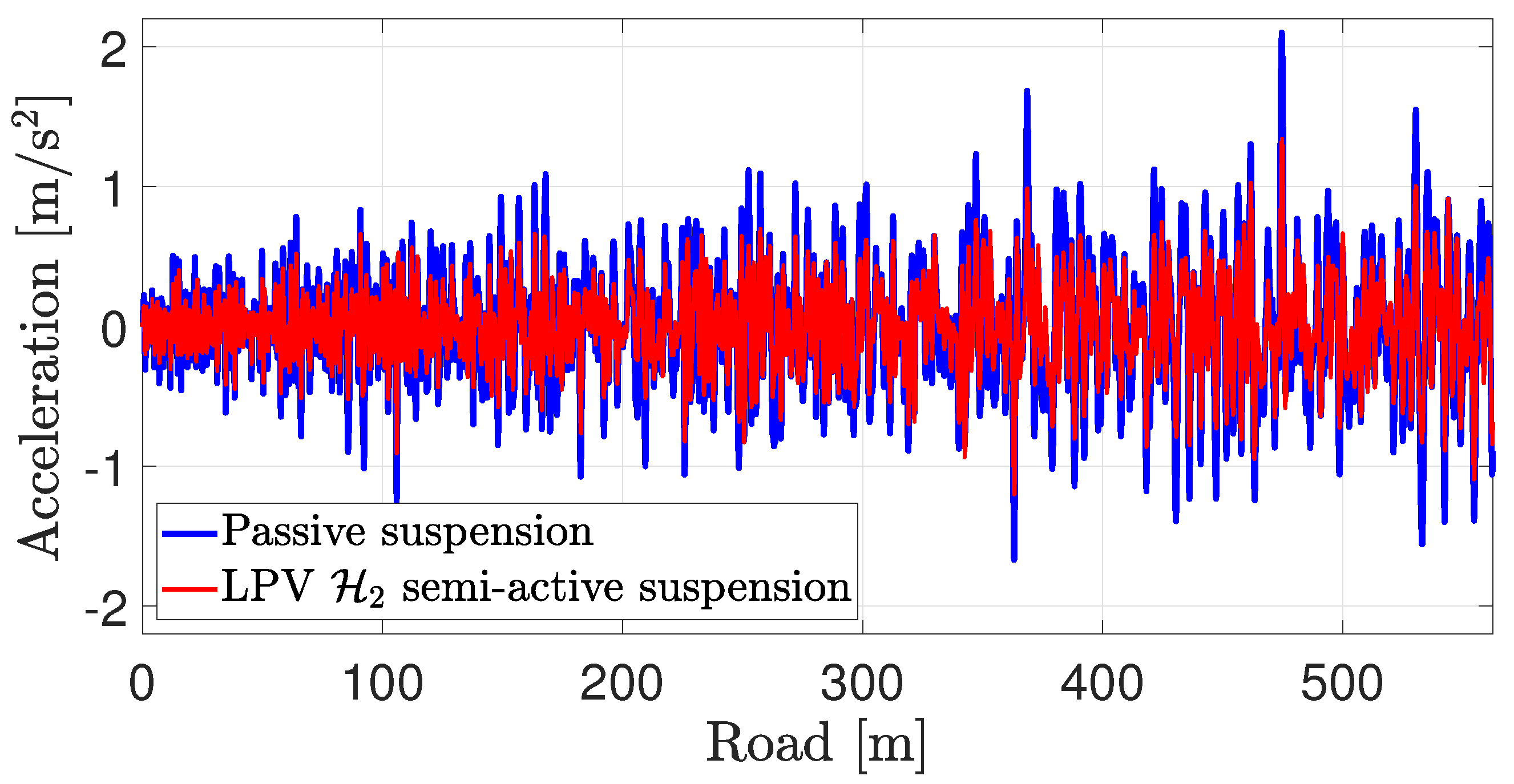
The resulting accelerations are shown in
Figure 28, whose RMS values are
m/s
for the passive suspension case and
m/s
for the LPV
semi-active suspension case, which correspond to the comfort level of “uncomfortable” and “fairly uncomfortable”, respectively, according to
Table 3. Finally, the resulting deflections are shown in
Figure 29, from which we can see that again, semi-active suspension leads to smaller deflection values compared to passive suspension. These results show that the proposed method is robust enough w.r.t the uncertainty.
6.3. Comparison of Comfort Performances: Passive vs. Semi-Active Suspension
Table 6 summarizes the comfort evaluation for the two performed simulation scenarios.
Clearly, the LPV semi-active suspension control outperforms the passive one, and it allows for an efficient coupling between the longitudinal and vertical dynamics.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}