
A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna





Abstract
:1. Introduction
2. Proposed TDoA-Based Method
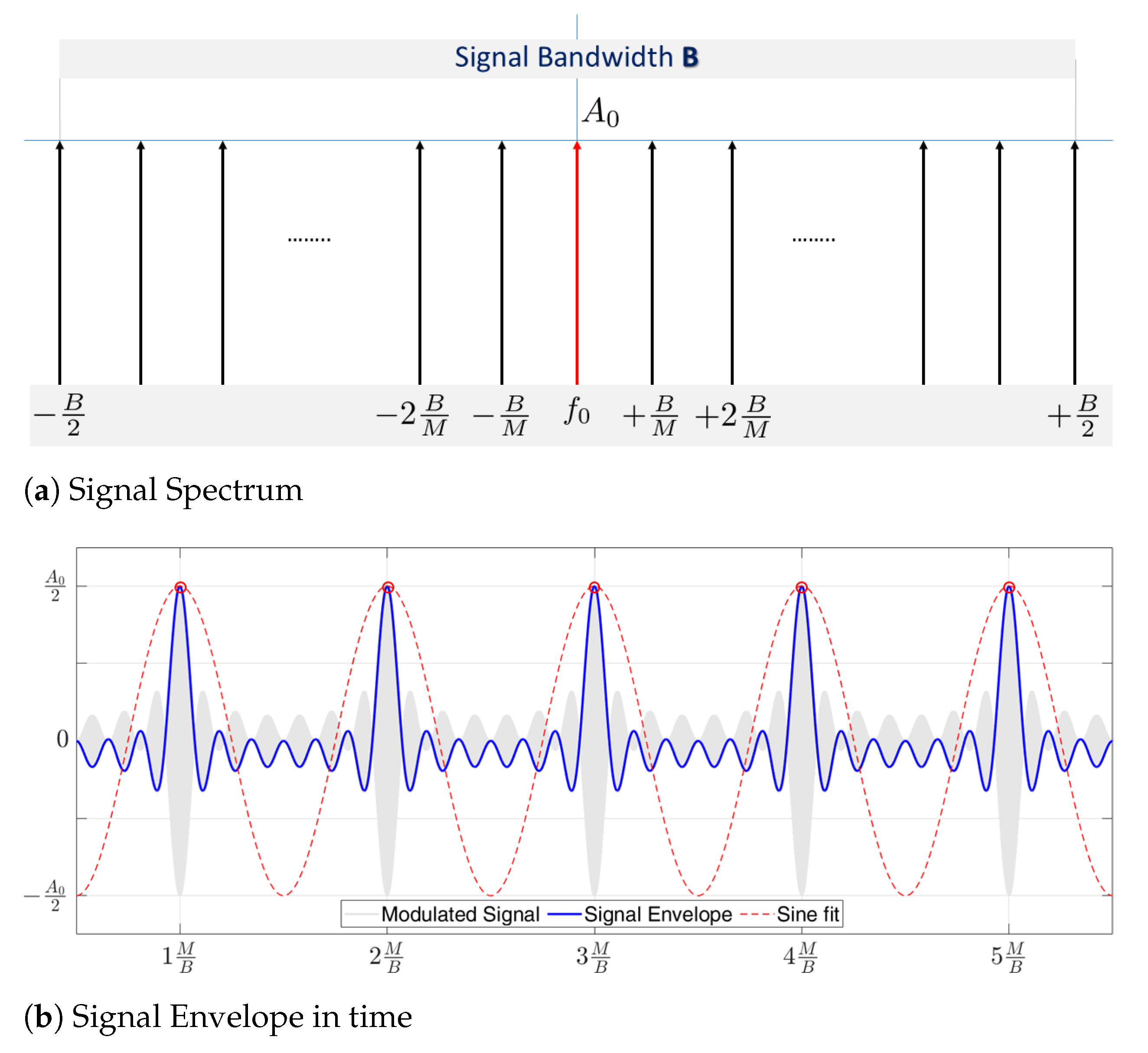
2.1. Application Scenario and Analytical Model
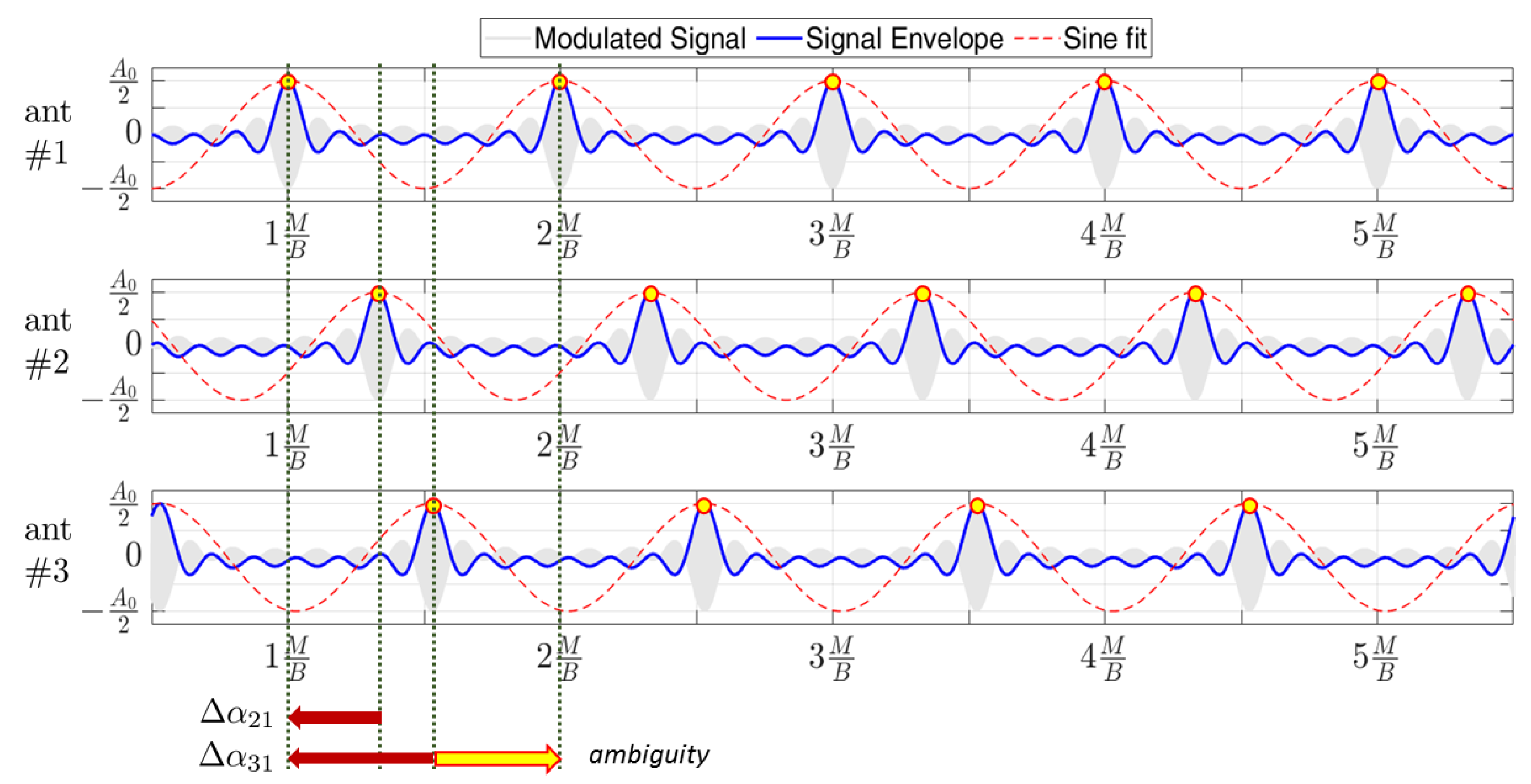
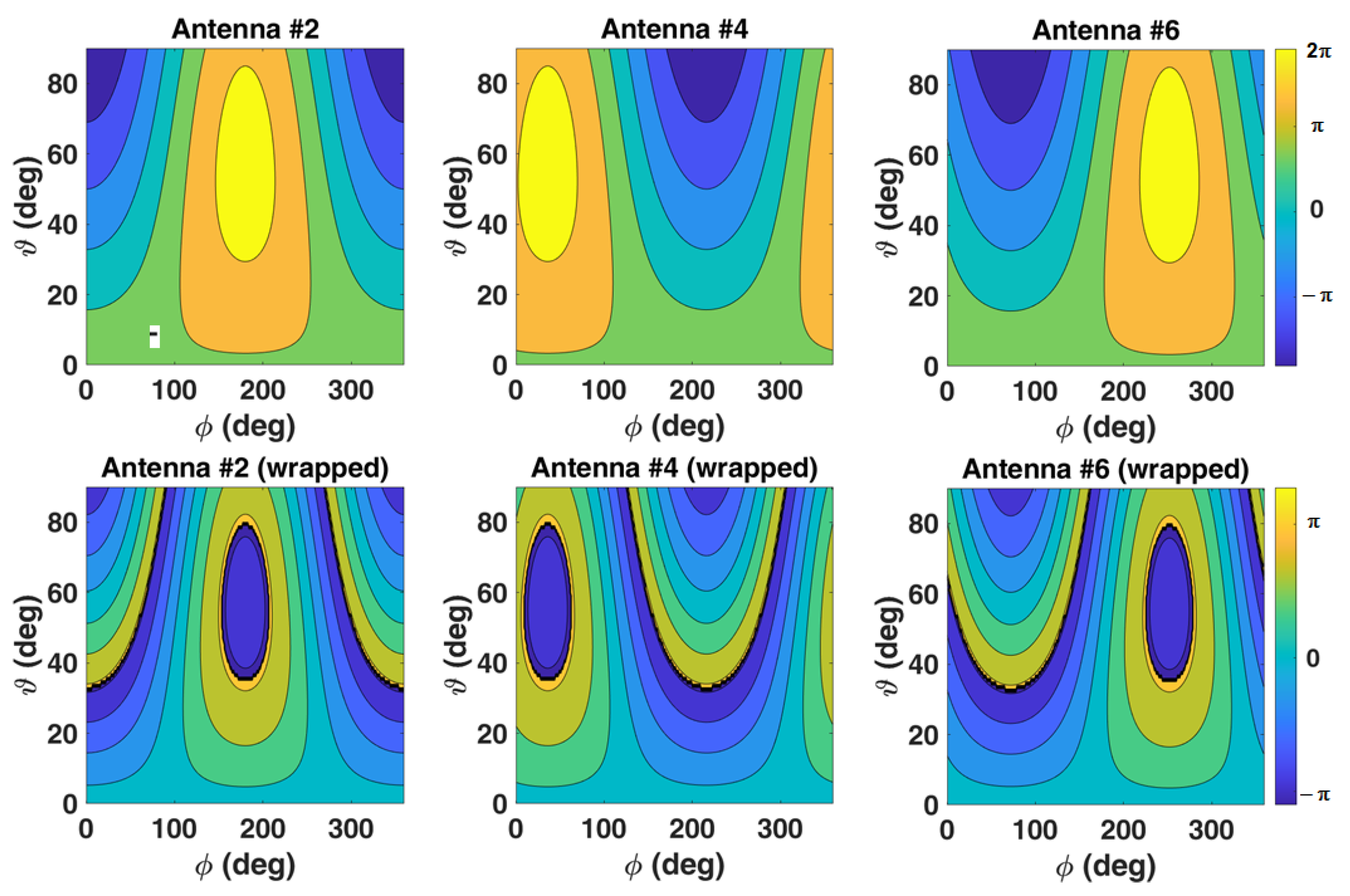
2.2. Phase-Wrapping Issues
2.3. Phase Reconstruction Method
2.4. Definition of a Valid Observation Model
3. TDoA Method Experimental Validation
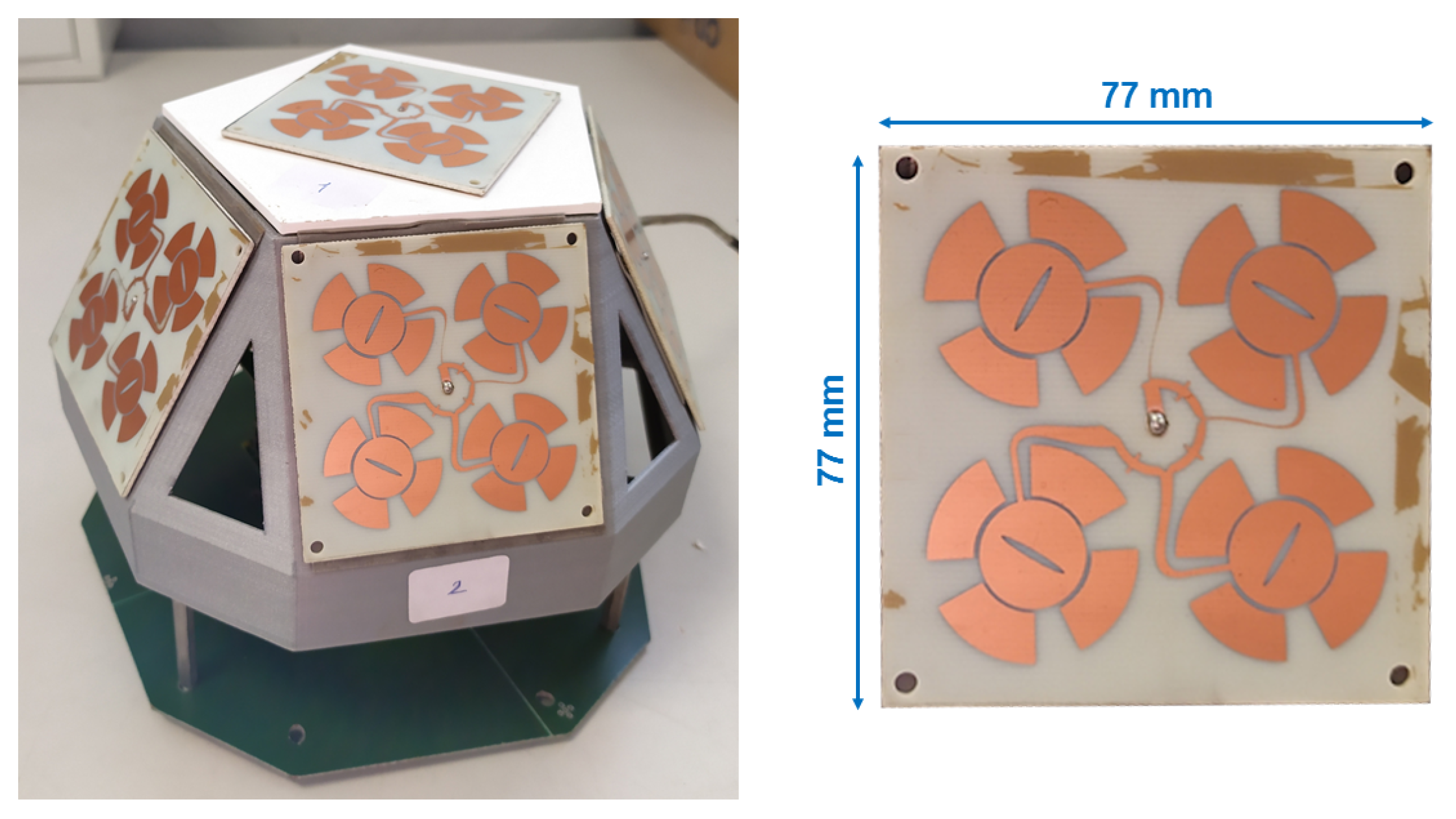
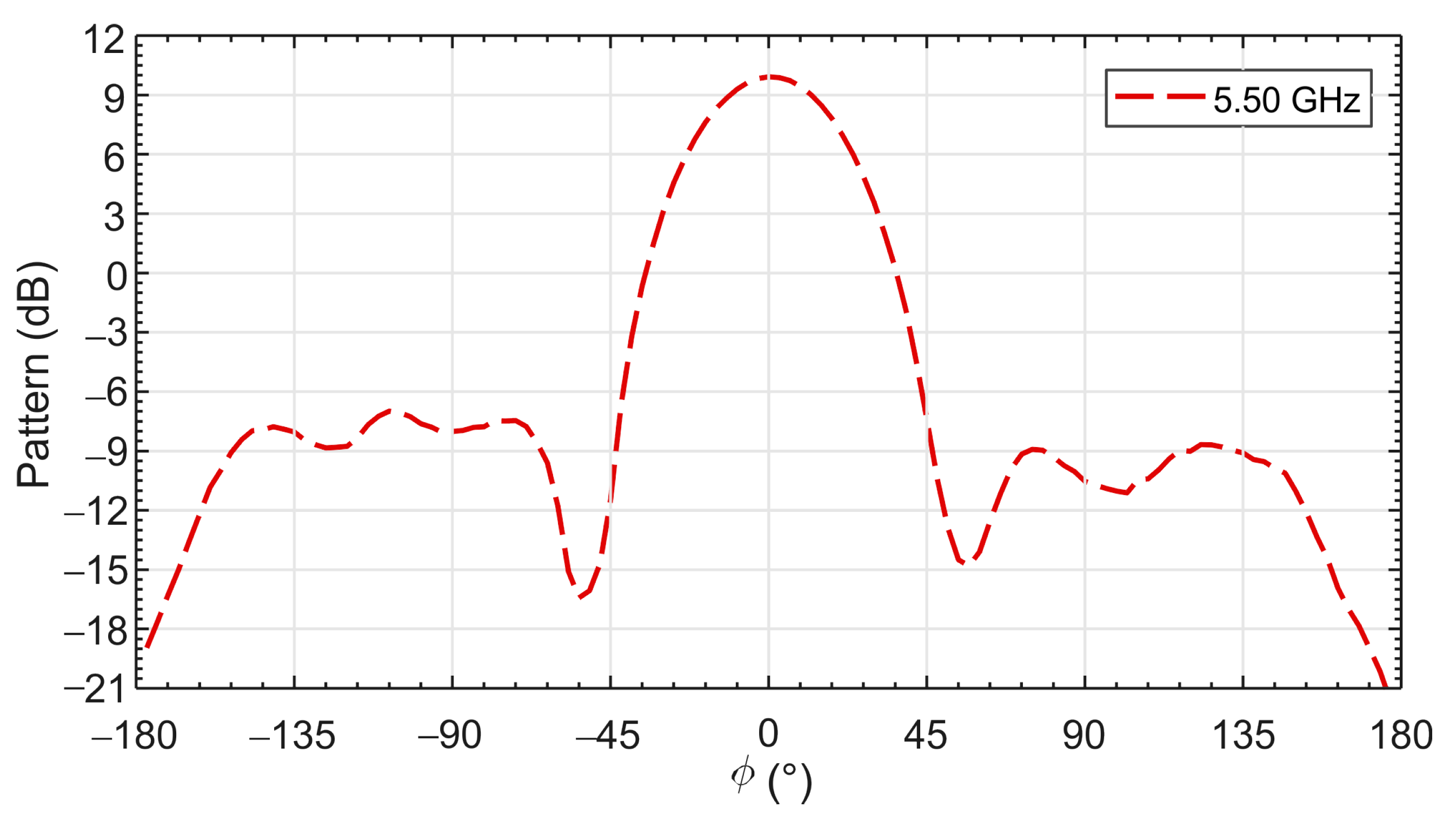
3.1. Anchor Switched Beam Antenna Design
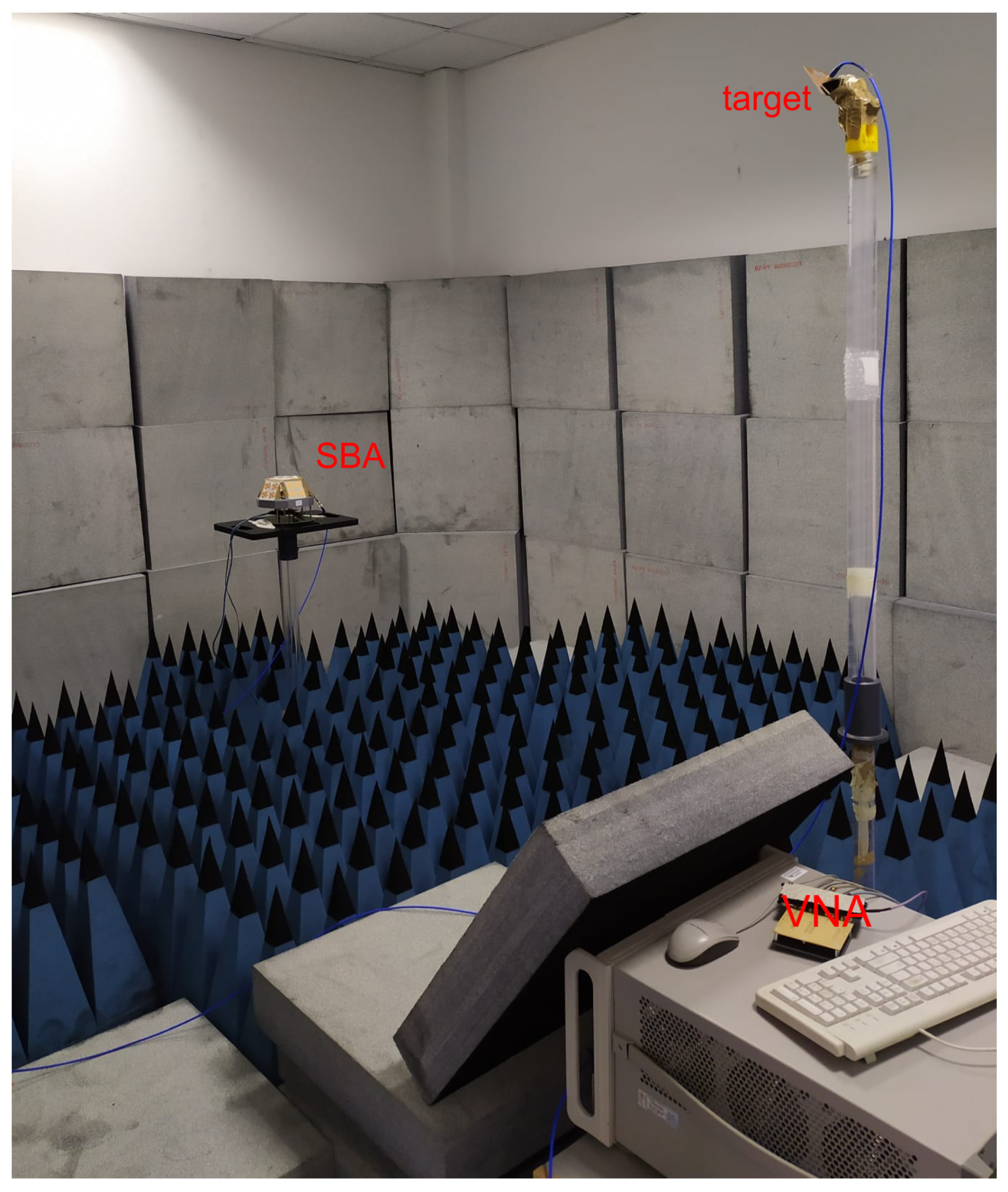
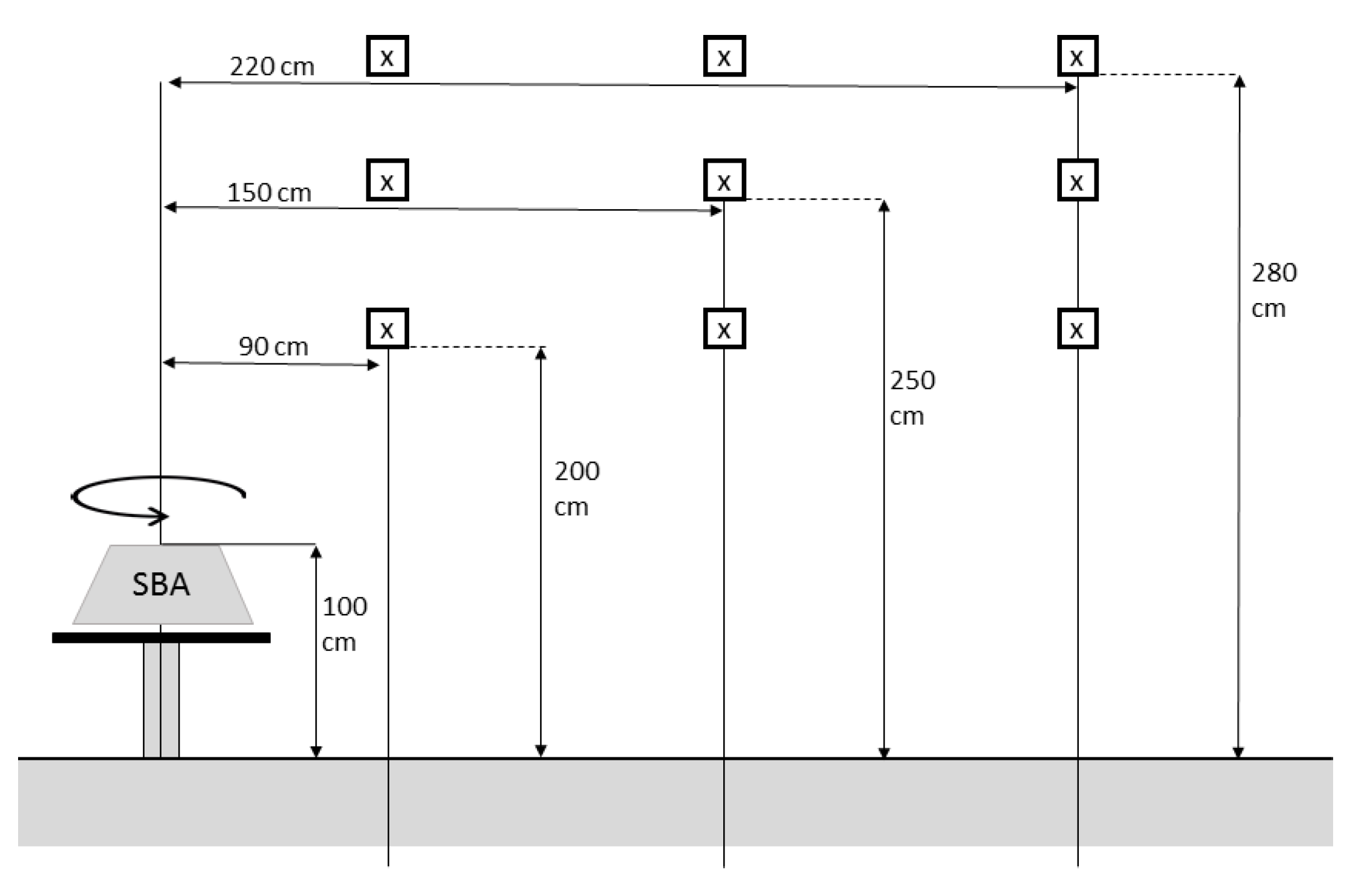
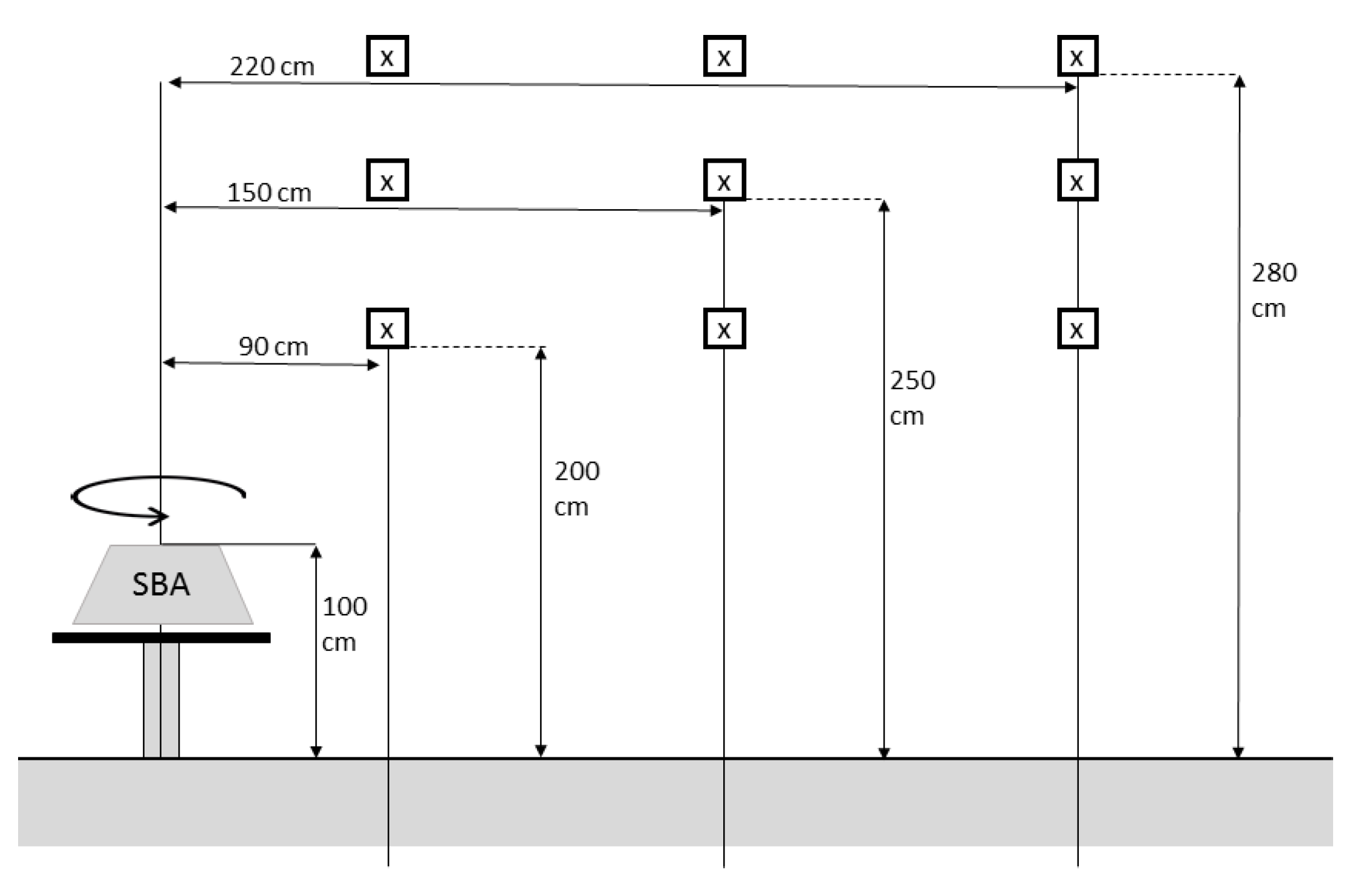
3.2. Experimental Setup
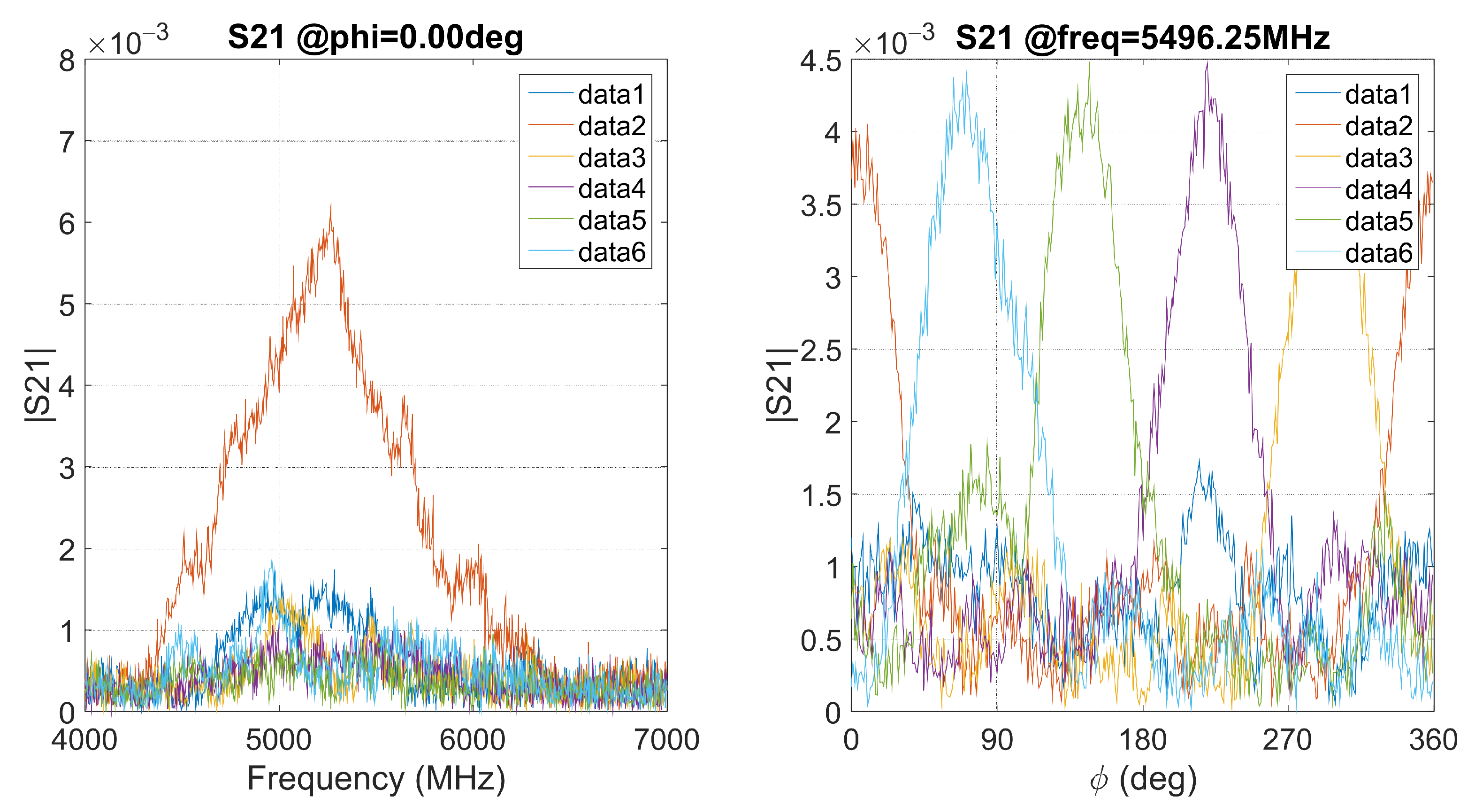
3.3. Experimental Measurements
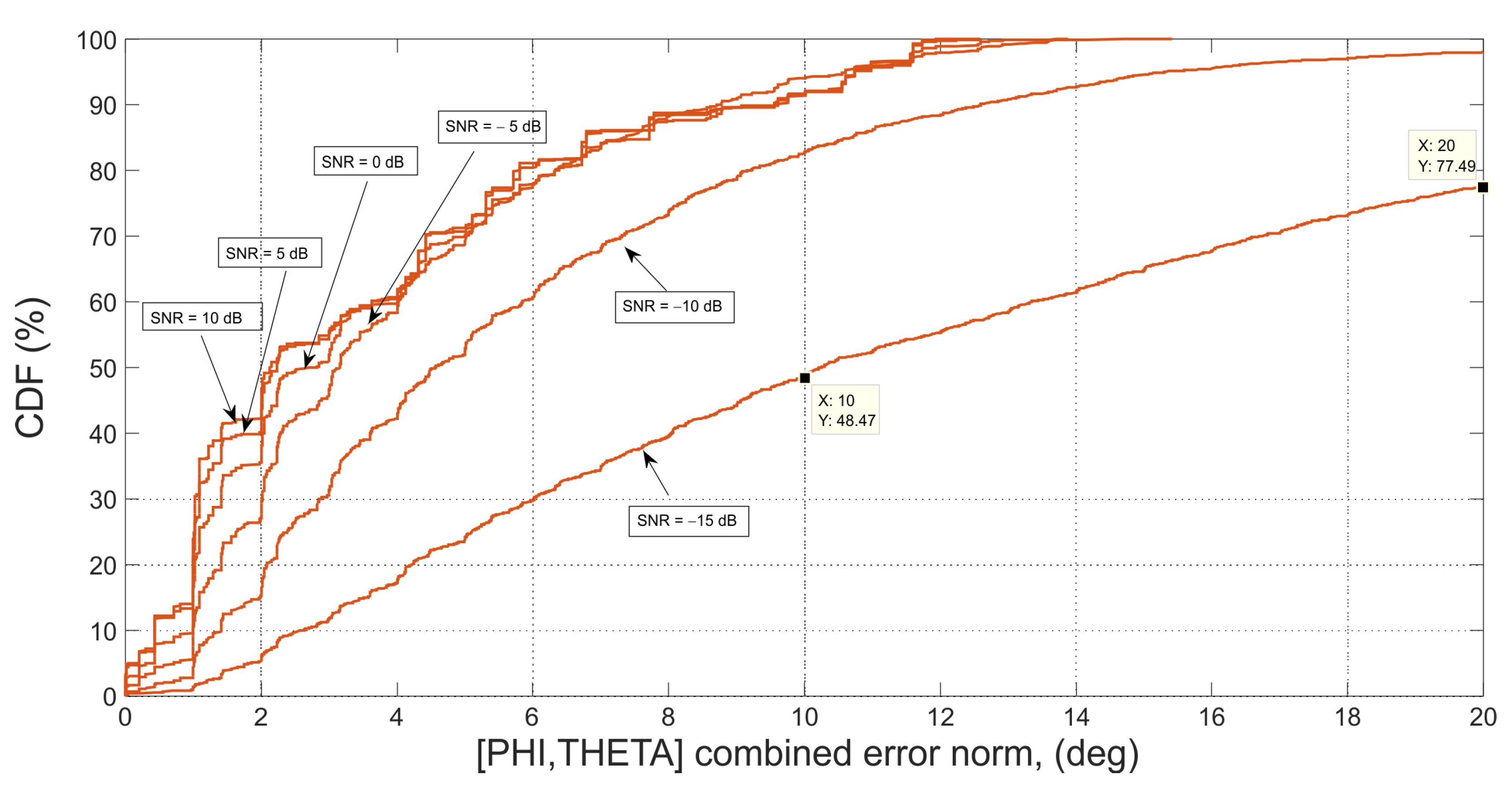
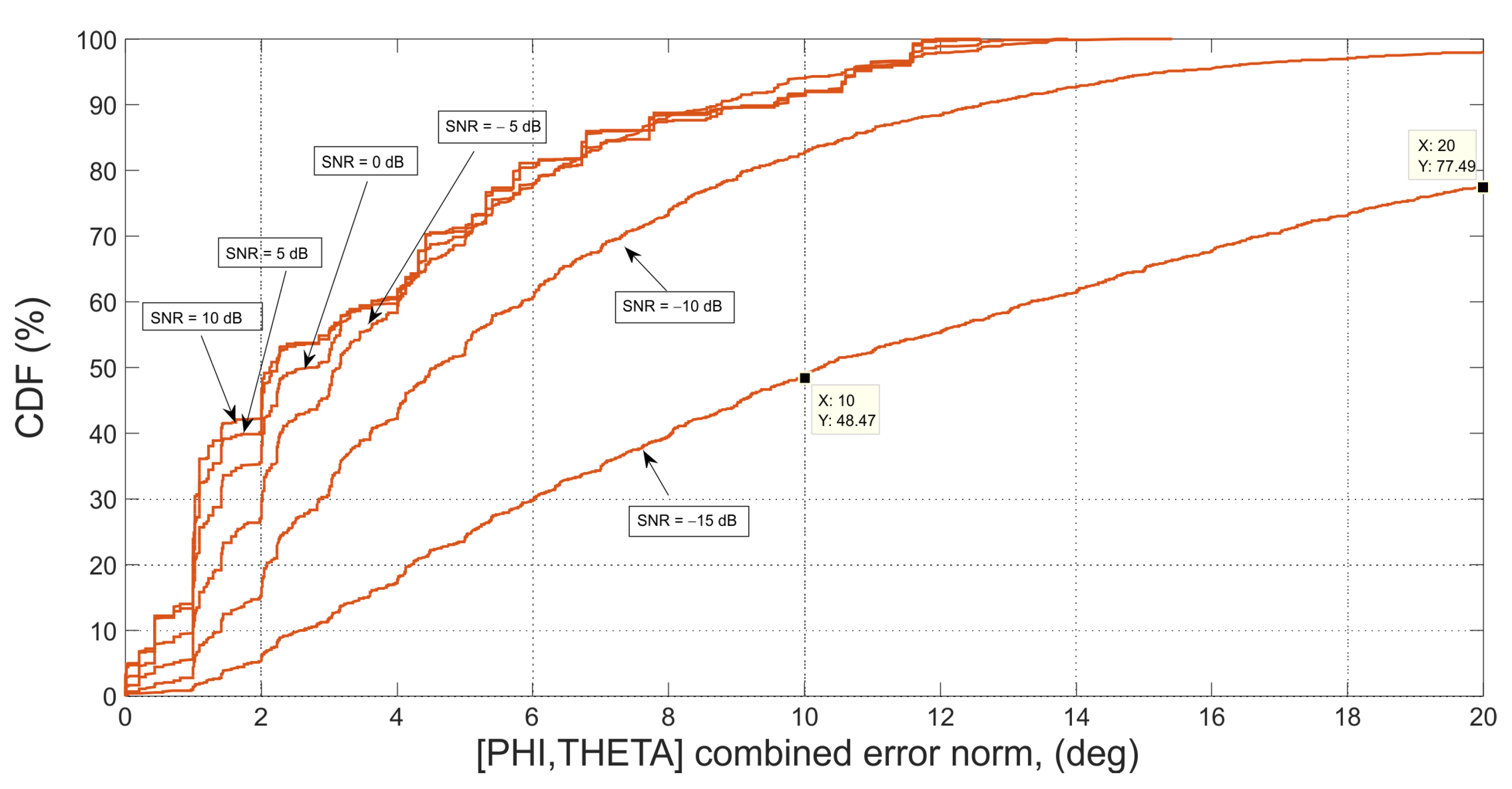
3.4. Simulated DoA Accuracy versus SNR
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CDF | Cumulative Distribution Function |
| DoA | Direction of Arrival |
| ML | Maximum Likelihood |
| RSSI | Received Signal Strength Indicator |
| SBA | Switched Beam Antenna |
References
- Guan, W.; Chen, S.; Wen, S.; Tan, Z.; Song, H.; Hou, W. High-accuracy robot indoor localization scheme based on robot operating system using visible light positioning. IEEE Photonics J. 2020, 12, 1–16. [Google Scholar] [CrossRef]
- Guan, T.; Fang, L.; Dong, W.; Koutsonikolas, D.; Challen, G.; Qiao, C. Robust, cost-effective and scalable localization in large indoor areas. Comput. Netw. 2017, 120, 43–55. [Google Scholar] [CrossRef]
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. Indoor localization for IoT using adaptive feature selection: A cascaded machine learning approach. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2306–2310. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A survey of localization systems in internet of things. Mob. Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Sakpere, W.; Adeyeye Oshin, M.; Mlitwa, N. A State-of-the-Art Survey of Indoor Positioning and Navigation Systems and Technologies. S. Afr. Comput. J. 2017, 29, 145. [Google Scholar] [CrossRef] [Green Version]
- Groth, M.; Nyka, K.; Kulas, L. Calibration-Free Single-Anchor Indoor Localization Using an ESPAR Antenna. Sensors 2021, 21, 3431. [Google Scholar] [CrossRef]
- Kim, Y.J.; Kim, Y.B.; Dong, H.J.; Cho, Y.S.; Lee, H.L. Compact Switched-Beam Array Antenna with a Butler Matrix and a Folded Ground Structure. Electronics 2020, 9, 2. [Google Scholar] [CrossRef] [Green Version]
- Giorgetti, G.; Cidronali, A.; Gupta, S.K.; Manes, G. Single-anchor indoor localization using a switched-beam antenna. IEEE Commun. Lett. 2009, 13, 58–60. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.U.; Noh, G.; Ahn, B.; Yu, J.W.; Lee, H.L. Tilted-beam switched array antenna for UAV mounted radar applications with 360deg coverage. Electronics 2019, 8, 1240. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zong, H.; Qiu, J. A Range Resolution Enhancement Algorithm for Active Millimeter Wave Based on Phase Unwrapping Mechanism. Electronics 2021, 10, 1689. [Google Scholar] [CrossRef]
- Peng, H.; Zhi, R.; Yang, Q.; Cai, J.; Wan, Y.; Liu, G. Design of a MIMO Antenna with High Gain and Enhanced Isolation for WLAN Applications. Electronics 2021, 10, 1659. [Google Scholar] [CrossRef]
- Rojhani, N.; Passafiume, M.; Lucarelli, M.; Collodi, G.; Cidronali, A. Exploiting Compressive Sensing Basis Selection to Improve 2 × 2 MIMO Radar Image. In Proceedings of the 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 23–23 November 2020; pp. 1–4. [Google Scholar]
- Álvarez López, Y.; Rodríguez Vaqueiro, Y.; González Valdés, B.; Las Heras Andrés, F.L.; García Pino, A. Fourier-based imaging for subsampled multistatic arrays. IEEE Trans. Antennas Propag. 2016, 64, 2557–2562. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Gong, X.; Liu, K.; Zhang, S. Localization and Tracking of an Indoor Autonomous Vehicle Based on the Phase Difference of Passive UHF RFID Signals. Sensors 2021, 21, 3286. [Google Scholar] [CrossRef]
- Cidronali, A.; Collodi, G.; Lucarelli, M.; Maddio, S.; Passafiume, M.; Pelosi, G. A Combined DoA-ToA Localization Technique Based on a Broadband Switched Beam Antenna. In Proceedings of the 2019 IEEE Conference on Antenna Measurements & Applications (CAMA), Kuta, Indonesia, 23–25 October 2019; pp. 210–213. [Google Scholar]
- Passafiume, M.; Maddio, S.; Cidronali, A. An improved approach for RSSI-based only calibration-free real-time indoor localization on IEEE 802.11 and 802.15. 4 wireless networks. Sensors 2017, 17, 717. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Wang, H.; Wang, J.; Gao, H.; Liu, J. Robust Wi-Fi indoor localization with KPCA feature extraction of dual band signals. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 908–913. [Google Scholar]
- Maddio, S.; Passafiume, M.; Cidronali, A.; Manes, G. A distributed positioning system based on a predictive fingerprinting method enabling sub-metric precision in IEEE 802.11 networks. IEEE Trans. Microw. Theory Tech. 2015, 63, 4567–4580. [Google Scholar] [CrossRef]
- Wen, Y.; Tian, X.; Wang, X.; Lu, S. Fundamental limits of RSS fingerprinting based indoor localization. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2479–2487. [Google Scholar]
- Werner, J.; Wang, J.; Hakkarainen, A.; Cabric, D.; Valkama, M. Performance and Cramer–Rao bounds for DoA/RSS estimation and transmitter localization using sectorized antennas. IEEE Trans. Veh. Technol. 2015, 65, 3255–3270. [Google Scholar] [CrossRef]
- Passafiume, M.; Maddio, S.; Cidronali, A.; Manes, G. MUSIC algorithm for RSSI-based DoA estimation on standard IEEE 802.11/802.15. x systems. World Sci. Eng. Acad. Soc. Trans. Signal Process 2015, 11, 58–68. [Google Scholar]
- Cidronali, A.; Collodi, G.; Maddio, S.; Passafiume, M.; Pelosi, G. 2-D DoA anchor suitable for indoor positioning systems based on space and frequency diversity for legacy WLAN. IEEE Microw. Wirel. Compon. Lett. 2018, 28, 627–629. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Gupta, P.; Kar, S. MUSIC and improved MUSIC algorithm to estimate direction of arrival. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015; pp. 0757–0761. [Google Scholar]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Cidronali, A.; Collodi, G.; Lucarelli, M.; Maddio, S.; Passafiume, M.; Pelosi, G. Assessment of Anchors Constellation Features in RSSI-Based Indoor Positioning Systems for Smart Environments. Electronics 2020, 9, 1026. [Google Scholar] [CrossRef]
- Cidronali, A.; Ciervo, E.; Collodi, G.; Maddio, S.; Passafiume, M.; Pelosi, G. Analysis of Dual-Band Direction of Arrival Estimation in Multipath Scenarios. Electronics 2021, 10, 1236. [Google Scholar] [CrossRef]
- Maddio, S.; Cidronali, A.; Passafiume, M.; Collodi, G.; Lucarelli, M.; Maurri, S. Multipath robust azimuthal direction of arrival estimation in dual-band 2.45–5.2 GHz networks. IEEE Trans. Microw. Theory Tech. 2017, 65, 4438–4449. [Google Scholar] [CrossRef]
- Cidronali, A.; Collodi, G.; Lucarelli, M.; Maddio, S.; Passafiume, M.; Pelosi, G. An IEEE 802. 15. 4 Wireless Half-Cubic Node Based on a Switched-Beam Antenna for Indoor Direction of Arrival Estimation. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 10–15 January 2021; pp. 286–289. [Google Scholar]
- Cidronali, A.; Collodi, G.; Lucarelli, M.; Maddio, S.; Passafiume, M.; Pelosi, G. Continuous Beam Steering For Phaseless Direction-of-Arrival Estimations. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2666–2670. [Google Scholar] [CrossRef]
- Hou, Y.; Yang, X.; Abbasi, Q.H. Efficient AoA-based wireless indoor localization for hospital outpatients using mobile devices. Sensors 2018, 18, 3698. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maddio, S.; Cidronali, A.; Passafiume, M.; Collodi, G.; Maurri, S. Fine-grained azimuthal direction of arrival estimation using received signal strengths. Electron. Lett. 2017, 53, 687–689. [Google Scholar] [CrossRef]
- Rojhani, N.; Passafiume, M.; Lucarelli, M.; Collodi, G.; Cidronali, A. Assessment of Compressive Sensing 2 × 2 MIMO Antenna Design for Millimeter-Wave Radar Image Enhancement. Electronics 2020, 9, 624. [Google Scholar] [CrossRef] [Green Version]
- Cidronali, A.; Passafiume, M.; Colantonio, P.; Collodi, G.; Florian, C.; Leuzzi, G.; Pirola, M.; Ramella, C.; Santarelli, A.; Traverso, P. System level analysis of millimetre-wave gan-based mimo radar for detection of micro unmanned aerial vehicles. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; pp. 438–450. [Google Scholar]
- Levis, C.; Johnson, J.T.; Teixeira, F.L. Radiowave Propagation: Physics and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Cidronali, A.; Maddio, S.; Passafiume, M.; Manes, G. Car talk: Technologies for vehicle-to-roadside communications. IEEE Microw. Mag. 2016, 17, 40–60. [Google Scholar] [CrossRef]
- Bras, L.; Carvalho, N.; Pinho, P.; Kulas, L.; Nyka, K. A Review of Antennas for Indoor Positioning Systems. Int. J. Antennas Propag. 2012, 2012, 1–14. [Google Scholar] [CrossRef]
- Maddio, S.; Cidronali, A.; Manes, G. Smart Antennas for Direction-of-Arrival Indoor Positioning Applications. In Handbook of Position Location: Theory, Practice, and Advances; Wiley-IEEE Press: Piscataway, NJ, USA, 2011; pp. 319–355. [Google Scholar]
- Maddio, S.; Pelosi, G.; Selleri, S. Circularly polarised sequential array with enhanced gain and bandwidth for applications in C-band. IET Microw. Antennas Propag. 2020, 14, 1926–1932. [Google Scholar] [CrossRef]
- Maddio, S. A compact circularly polarized antenna for 5.8-GHz intelligent transportation system. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 533–536. [Google Scholar] [CrossRef]
- Maddio, S.; Passafiume, M.; Cidronali, A.; Manes, G. Impact of the dihedral angle of switched beam antennas in indoor positioning based on RSSI. In Proceedings of the 2014 11th European Radar Conference, Rome, Italy, 8–10 October 2014; pp. 317–320. [Google Scholar] [CrossRef]
- Barral, V.; Escudero, C.J.; García-Naya, J.A.; Maneiro-Catoira, R. NLOS identification and mitigation using low-cost UWB devices. Sensors 2019, 19, 3464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental evaluation of UWB indoor positioning for sport postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [Green Version]
- Deng, H.; Himed, B.; Wicks, M.C. Concurrent extraction of target range and Doppler information by using orthogonal coding waveforms. IEEE Trans. Signal Process. 2007, 55, 3294–3301. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal BW (GHz) | Operative BW (GHz) | Gain (dBi) | HPBW (deg) | Cross-Pol. (dB) |
|---|---|---|---|---|
| 4–7 | 4.75–6.25 | 8 ± 2 | 40 ± 10 | >15 |
| Antenna | x (cm) | y (cm) | z (cm) | ||
|---|---|---|---|---|---|
| #1 | 0 | - | 0.00 | 0.00 | 0.00 |
| #2 | 34 | 0 | 4.95 | 0.00 | −3.20 |
| #3 | 34 | 72 | 1.53 | −4.70 | −3.20 |
| #4 | 34 | 144 | −4.00 | −2.91 | −3.20 |
| #5 | 34 | 216 | −4.00 | 2.91 | −3.20 |
| #6 | 34 | 288 | 1.53 | 4.70 | −3.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Passafiume, M.; Collodi, G.; Ciervo, E.; Cidronali, A. A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna. Electronics 2021, 10, 2137. https://doi.org/10.3390/electronics10172137
Passafiume M, Collodi G, Ciervo E, Cidronali A. A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna. Electronics. 2021; 10(17):2137. https://doi.org/10.3390/electronics10172137
Chicago/Turabian StylePassafiume, Marco, Giovanni Collodi, Edoardo Ciervo, and Alessandro Cidronali. 2021. "A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna" Electronics 10, no. 17: 2137. https://doi.org/10.3390/electronics10172137
APA StylePassafiume, M., Collodi, G., Ciervo, E., & Cidronali, A. (2021). A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna. Electronics, 10(17), 2137. https://doi.org/10.3390/electronics10172137