
Adaptive Transfer Learning Based on a Two-Stream Densely Connected Residual Shrinkage Network for Transformer Fault Diagnosis over Vibration Signals


Abstract
:1. Introduction
- (1)
- In terms of feature extraction, transformer signals are extremely complicated due to their different vibration sources. Moreover, a transformer typically works in a strong interference environment, leading to many redundant signals. However, existing diagnosis methods usually compress signals to high dimensions or use traditional methods to extract features. Consequently, important fault features are easily lost, and the extracted features are not sufficiently comprehensive;
- (2)
- Fault diagnosis methods mostly include shallow and deep learning diagnosis methods at present. Traditional shallow fault diagnosis methods cannot completely distinguish fault features from signal signatures due to their simple network characteristics. Meanwhile, traditional deep learning diagnosis methods improve the capability to process complex signals, but they are prone to overfitting when dealing with small and unbalanced sample data.
- (1)
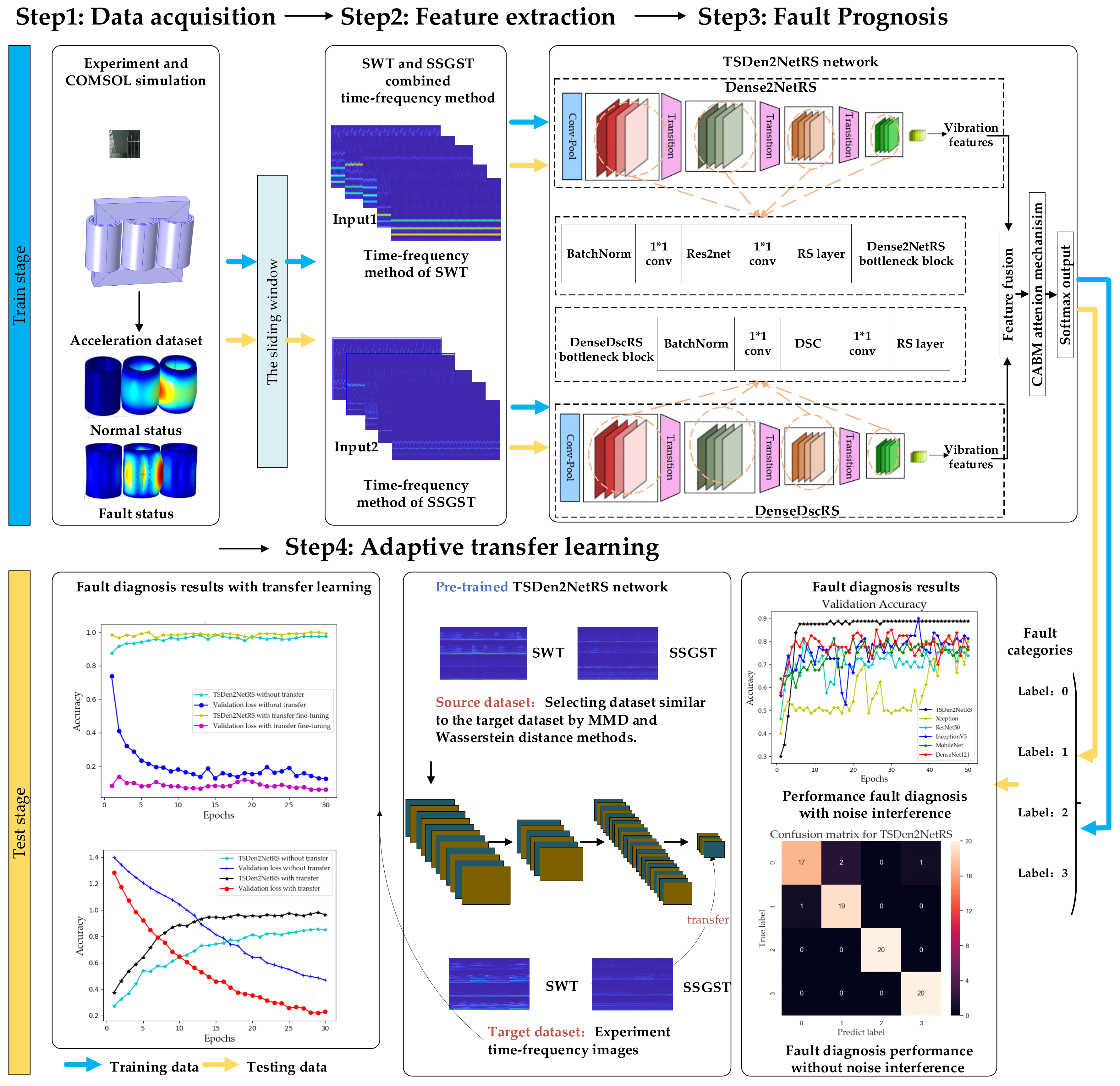
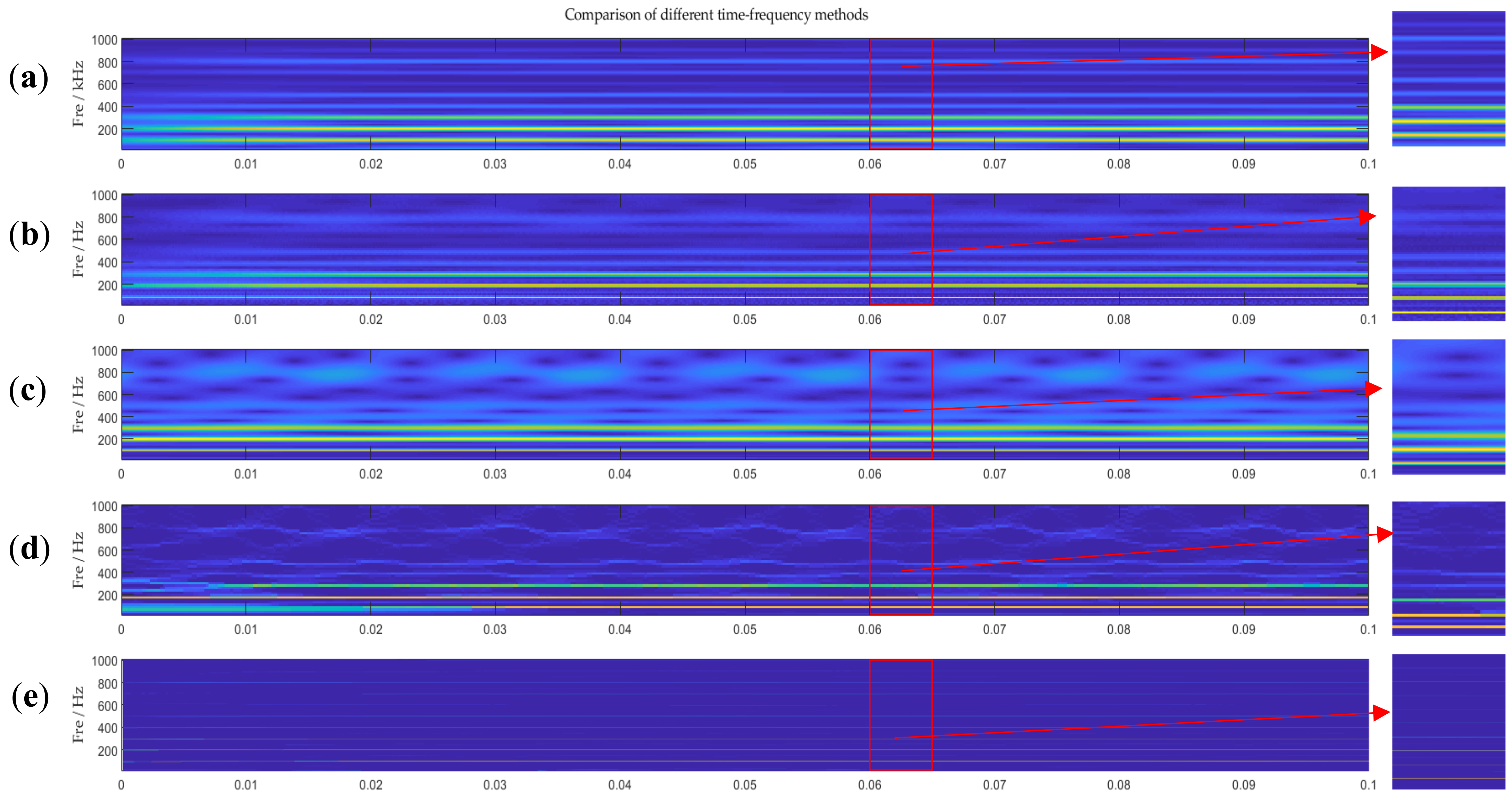
- The SWT and Synchrosqueezed Generalized S-transform (SSGST) combined time-frequency method inherits the advantages of SWT and SSGST. Thus, energy concentration is improved compared with that of the traditional time-frequency methods, and the limitation of fuzzy time-frequency representation is overcome. Given these advantages, the feature extraction capability can be effectively improved. Moreover, the combined time-frequency analysis method converts the vibration signals into different time-frequency images, increasing the number of time-frequency features and alleviating the overfitting of deep learning.
- (2)
- A novel Two-stream Densely Connected Residual Shrinkage (TSDen2NetRS) network is proposed to realize fault diagnosis. The network not only has multiscale signal analysis capability but also uses a lightweight hybrid network to reduce computation and memory costs. Furthermore, the proposed method with a residual shrinkage layer can automatically filter out unimportant interference signals, realize feature recalibration, and improve anti-interference performance.
- (3)
- An adaptive transfer learning method is applied to transformer fault diagnosis; it can automatically select the source data set by using the domain measurement method and improve recognition capability under small samples.
2. Proposed Method
2.1. SWT and SSGST Combined Time-Frequency Analysis Method
- (1)
- The theory of the SWT method is explained in detail. The Continuous Wavelet Transform (CWT) of the signal is defined as
- (2)
- The SSGST method is presented in detail. The Generalized S-transform (GST) of the signal is defined as
- (3)
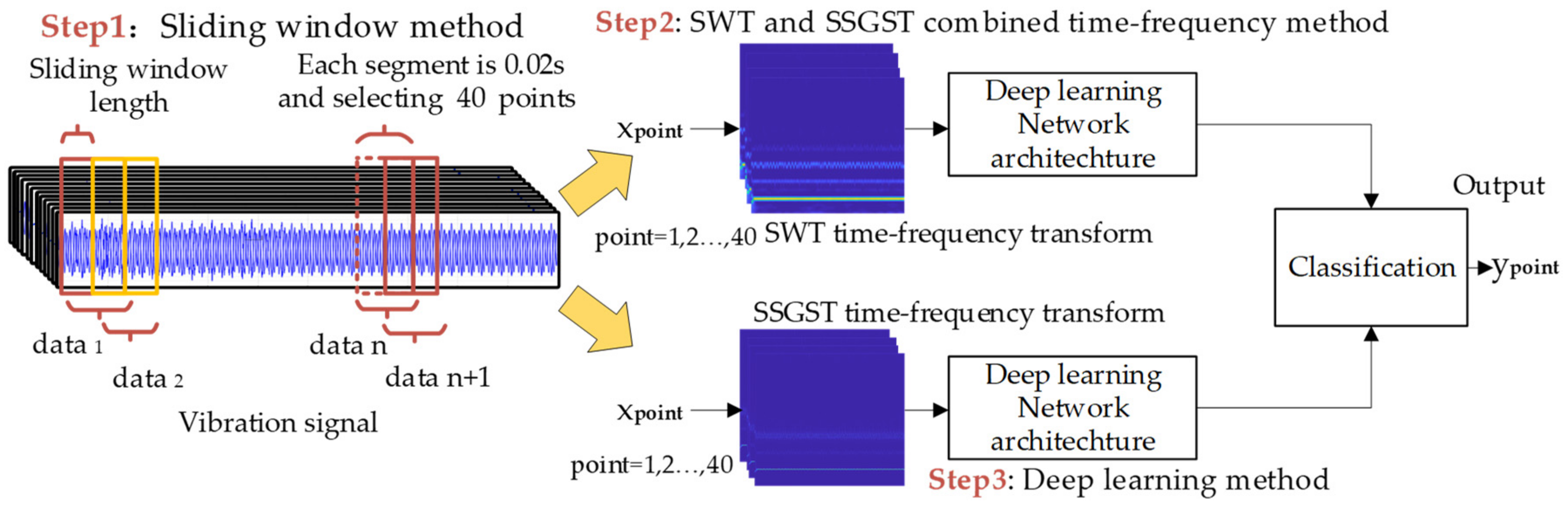
- The theory of the SWT and SSGST combined method is illustrated in detail. The data processed by the sliding window method is transformed into time-frequency images by the SWT and SSGST combined methods. It can be calculated as
2.2. The Proposed Novel Deep Learning Method
2.2.1. TSDen2Net
- (1)
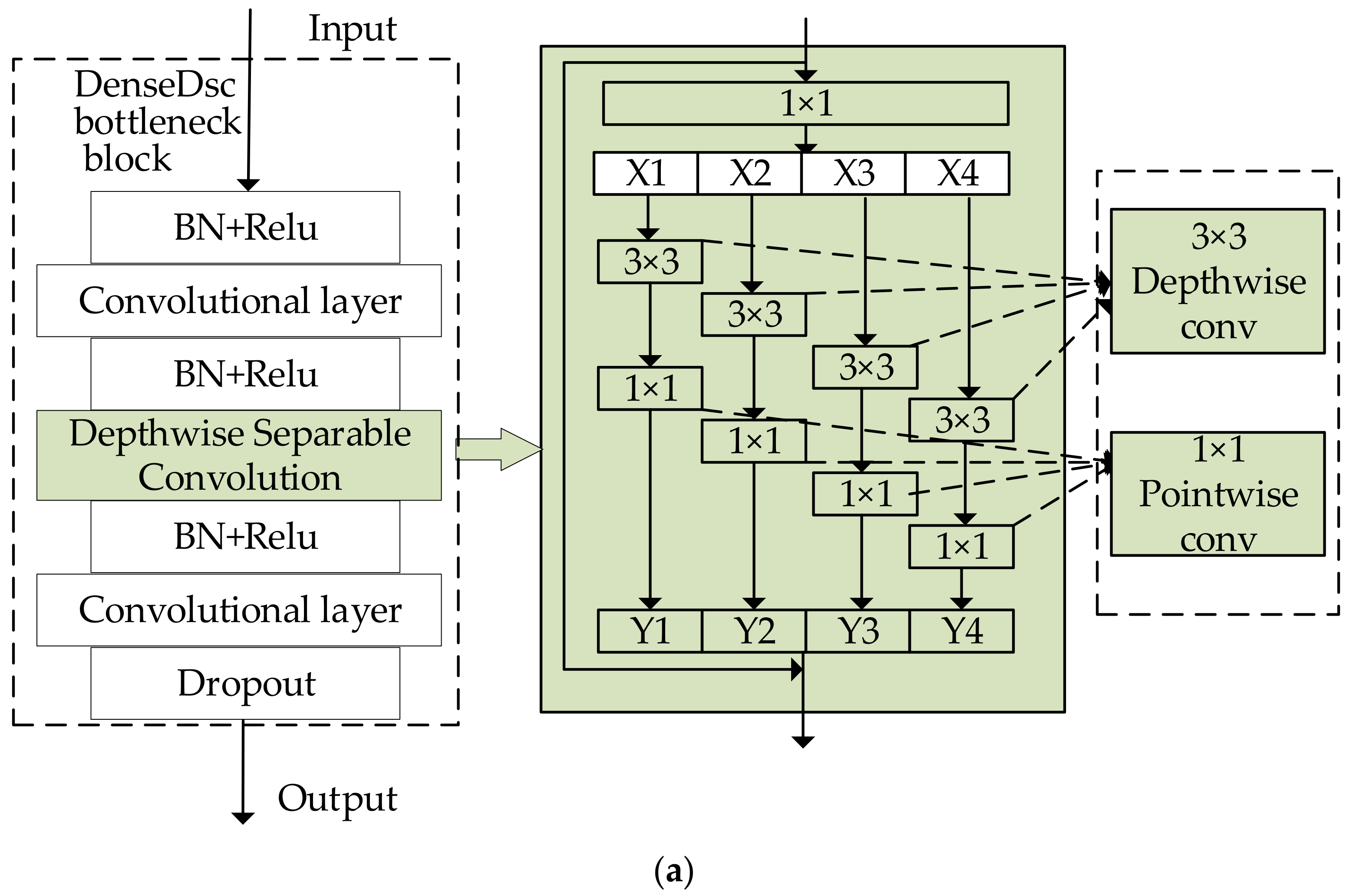
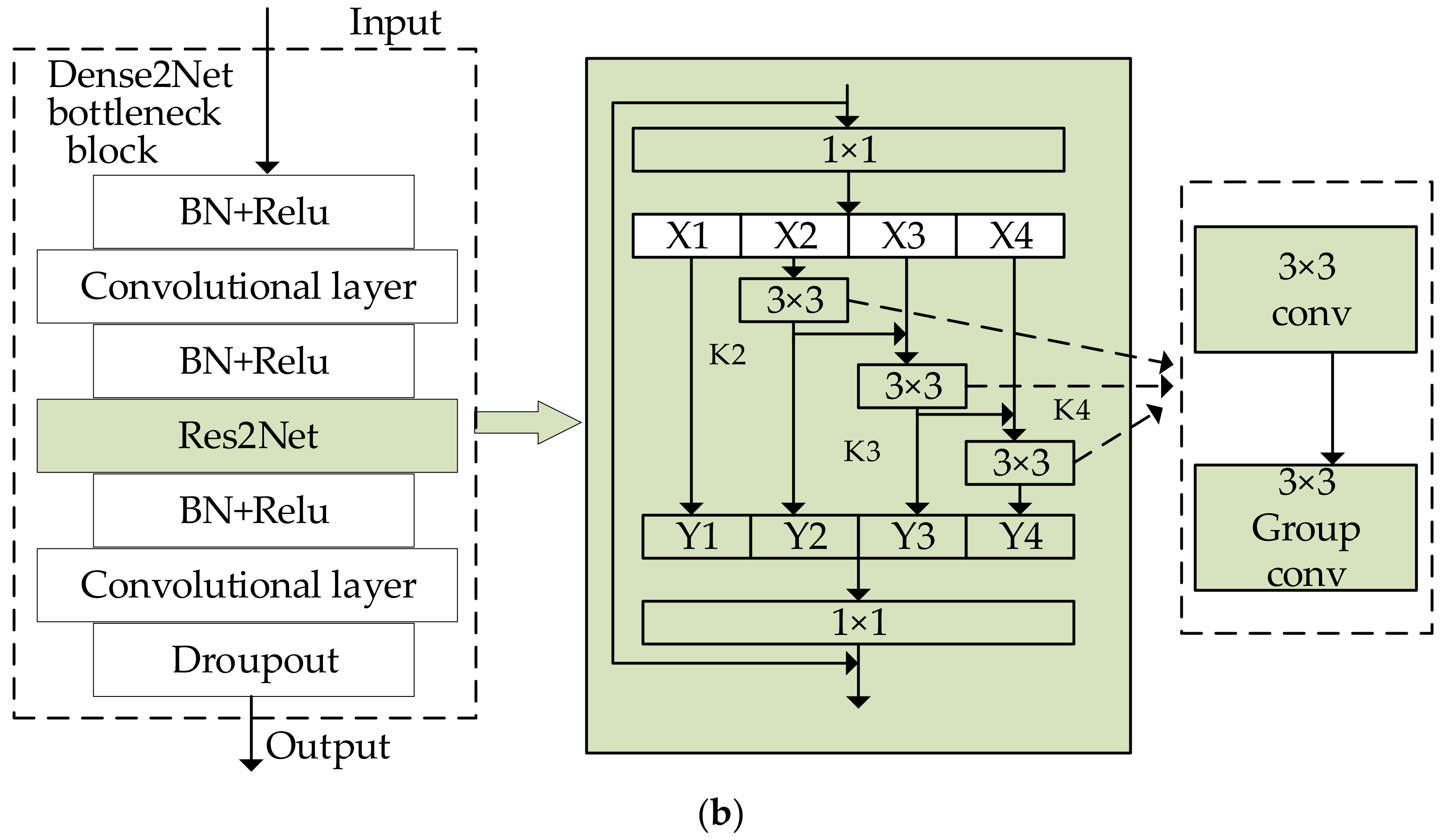
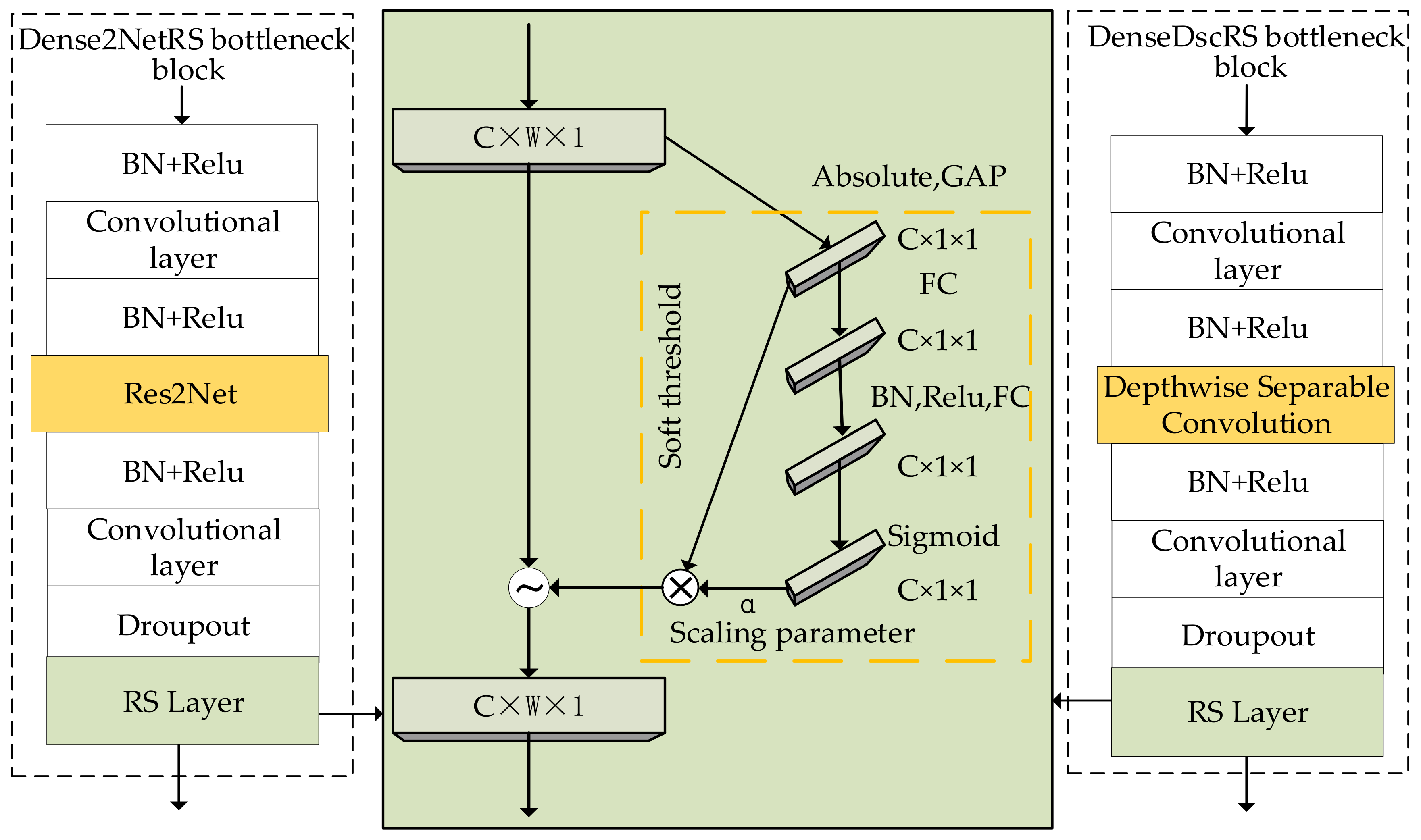
- First, we construct two efficient densely connected convolutional networks. Depthwise separable convolution is applied to optimize the DenseNet network [30], named DenseDsc. The original bottleneck block of DenseNet is replaced by four parallel depthwise separable convolutions, and the novel block is called the DenseDsc bottleneck block, which is presented in Figure 3a. Meanwhile, Res2Net, proposed by Gao et al., is used to improve the DenseNet network [34], called Dense2Net. The standard bottleneck block of Dense2Net is replaced by Res2Net, and the block is named Dense2Net bottleneck block, as is illustrated in Figure 3b.
- (2)
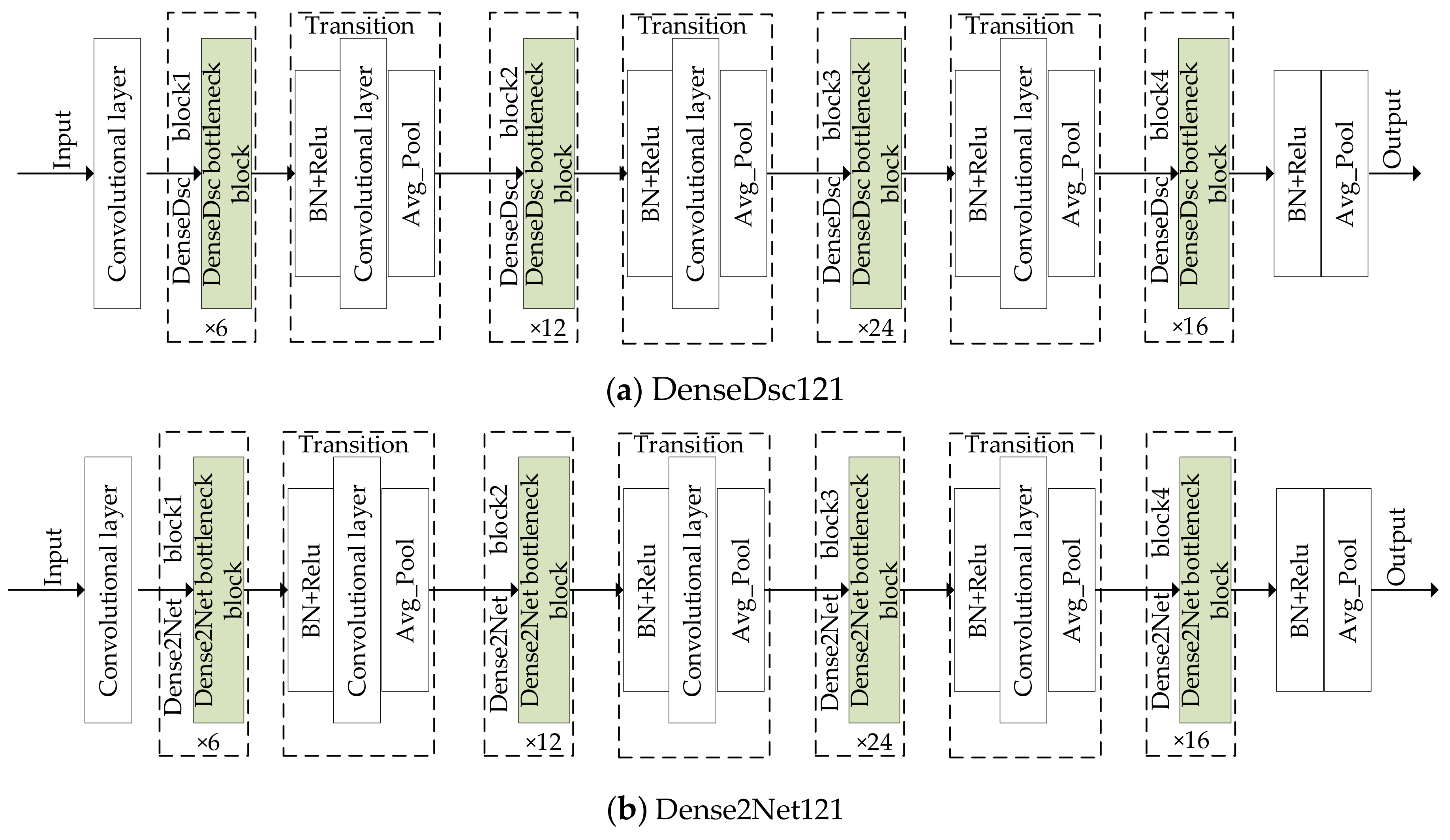
- Then, due to the complex vibration time-frequency images of the transformer, we use deeper DenseDsc and Dense2Net, which are structured similar to the DenseNet121 network, named DenseDsc121 and Dense2Net121. The overall architecture is shown in Figure 4. The DenseDsc121 and Dense2Net121 both have 4 DenseDsc blocks and 3 transition layers. Further, the DenseDsc block shown in Figure 4, which is densely connected by multiple DenseDsc bottleneck blocks. The Dense2Net block shown in Figure 4 is densely connected by multiple Dense2Net bottleneck blocks.
- (3)
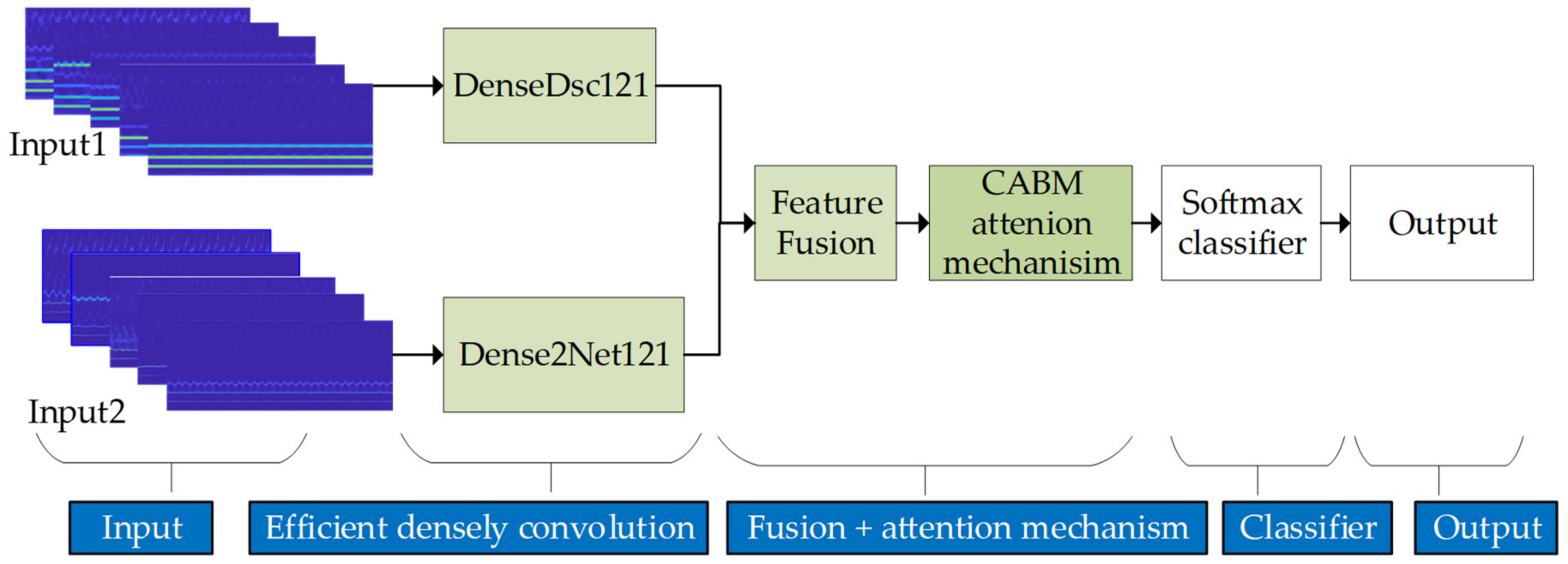
- In order to extract features from different scales, we use DenseDsc121 and Dense2Net121 to construct a two-stream network named TSDen2Net. Its overall architecture is shown in Figure 5, and the network structure is shown in Table 1. The two-stream method can extract information at different scales and supplement the lack of effective information, which is conducive to improving the accuracy considerably.
2.2.2. TSDen2NetRS
2.3. Adaptive Transfer Learning Method
2.3.1. Domain Similarity Measurement Method
2.3.2. The Proposed Transfer Learning Method
- (1)
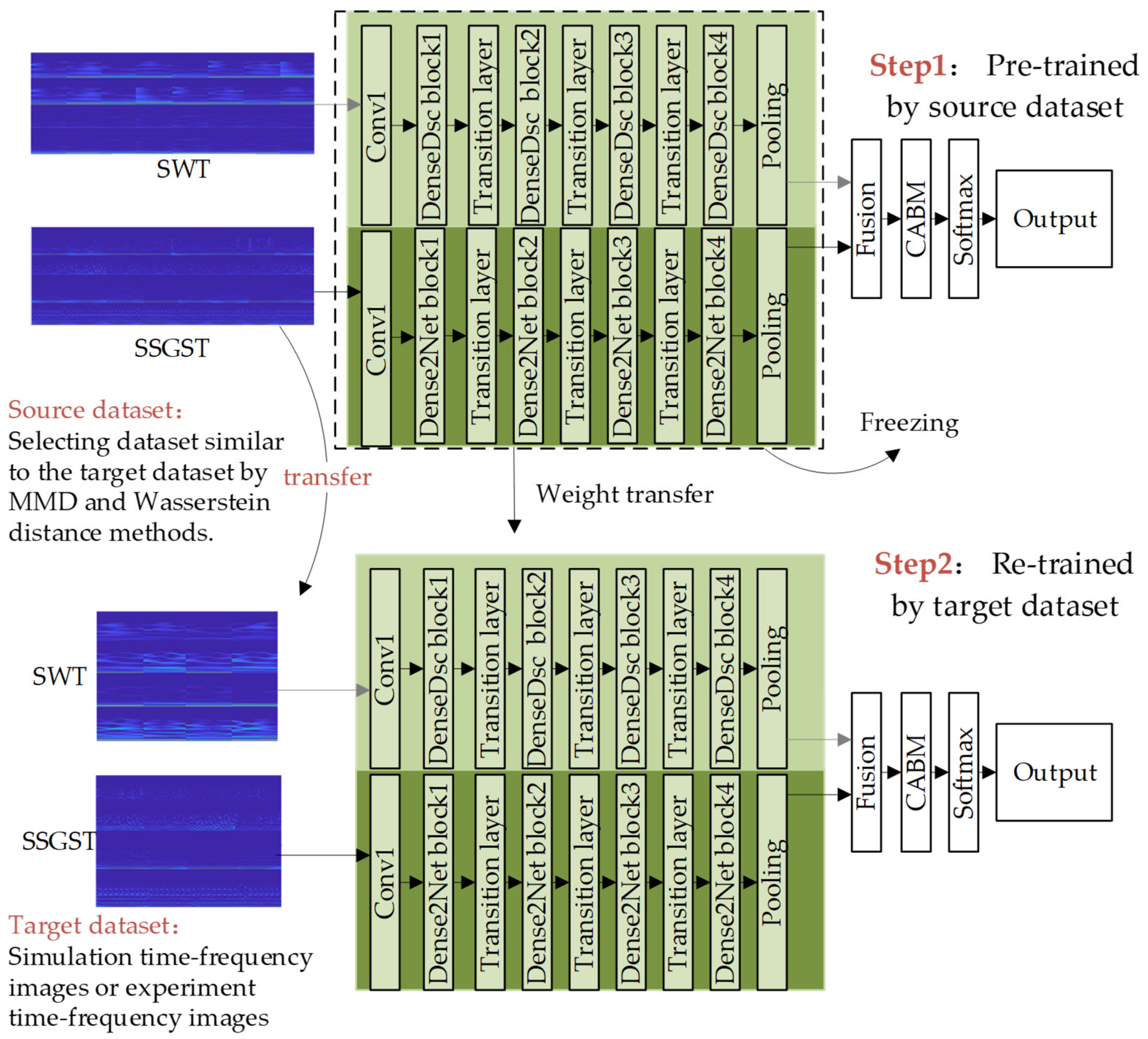
- The source data set is automatically selected from the candidate data sets for transfer learning using MMD and Wasserstein distance methods.
- (2)
- The TSDen2NetRS was trained by the source data set.
- (1)
- Determining the target data set and its labels.
- (2)
- Modifying the input data size and output data labels of the network structure according to the target data set.
- (3)
- The parameters of the original pre-trained network model remain unchanged except for the high-level and full connection layer, and then the target data set is used to retrain the network.
- (4)
- Finally, the network model is fine-tuned by the target data set.
3. Data Acquisition and Processing
3.1. Experiment
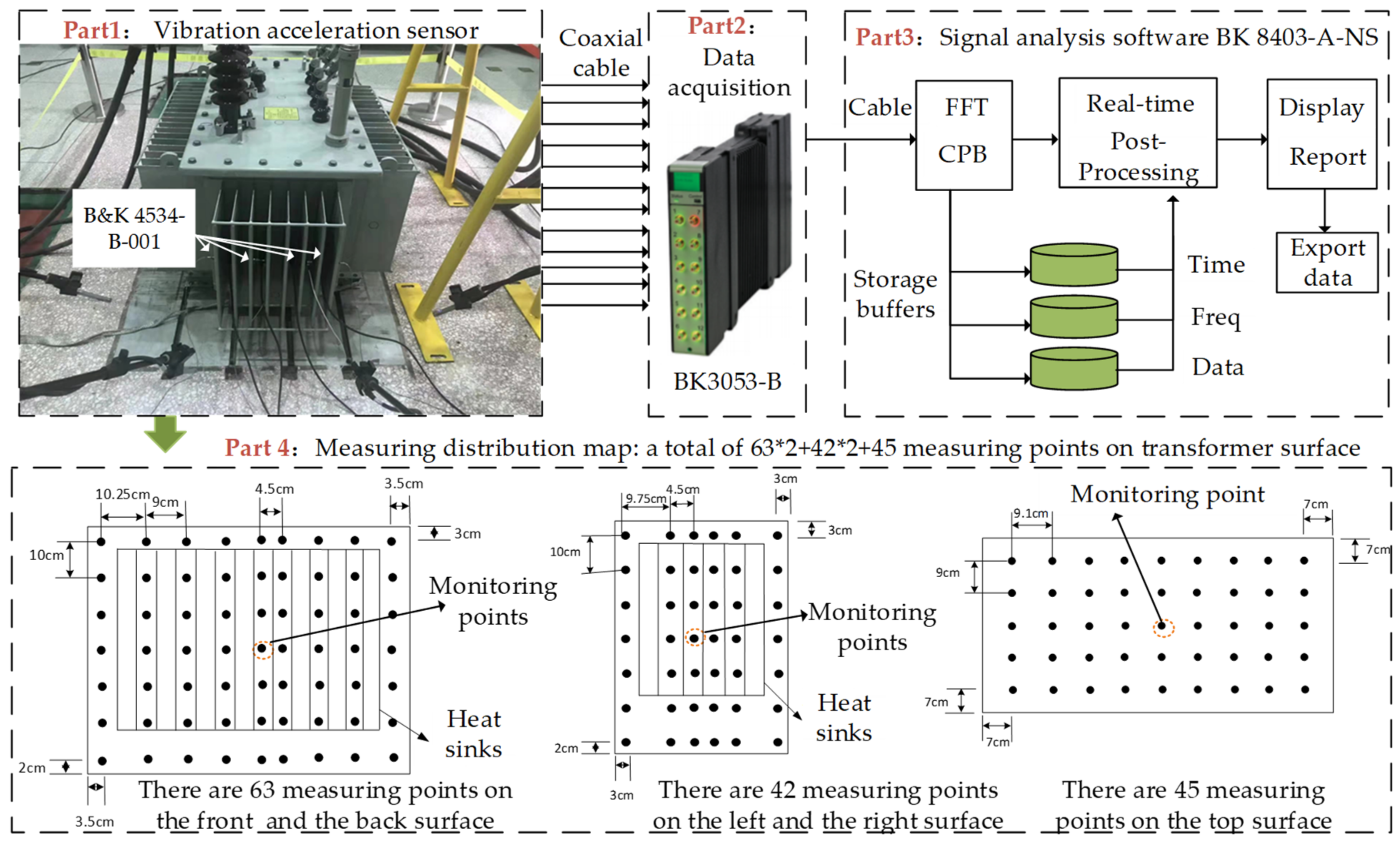
3.1.1. Experiment System
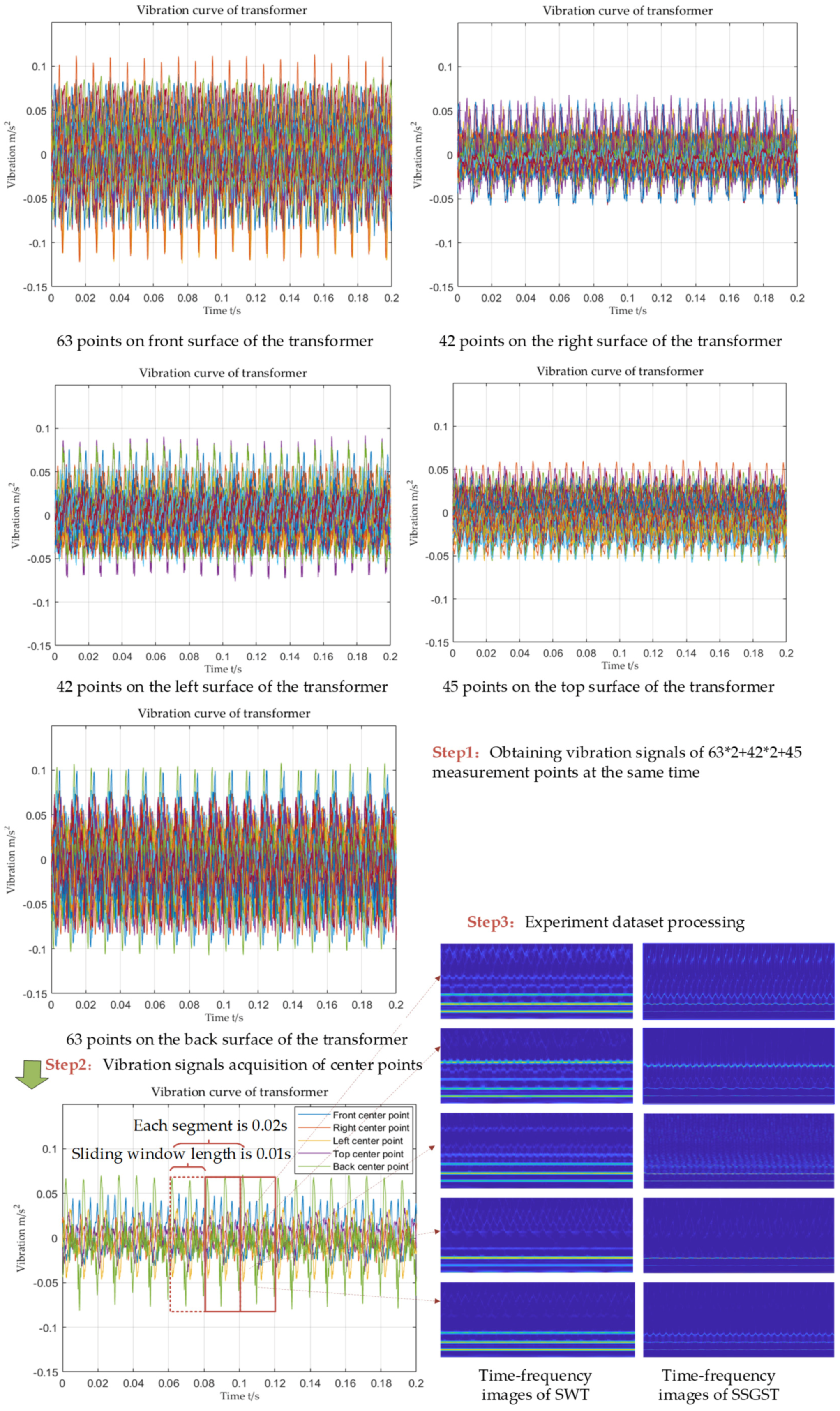
3.1.2. Experimental Data Set Acquisition and Processing
3.2. Simulation
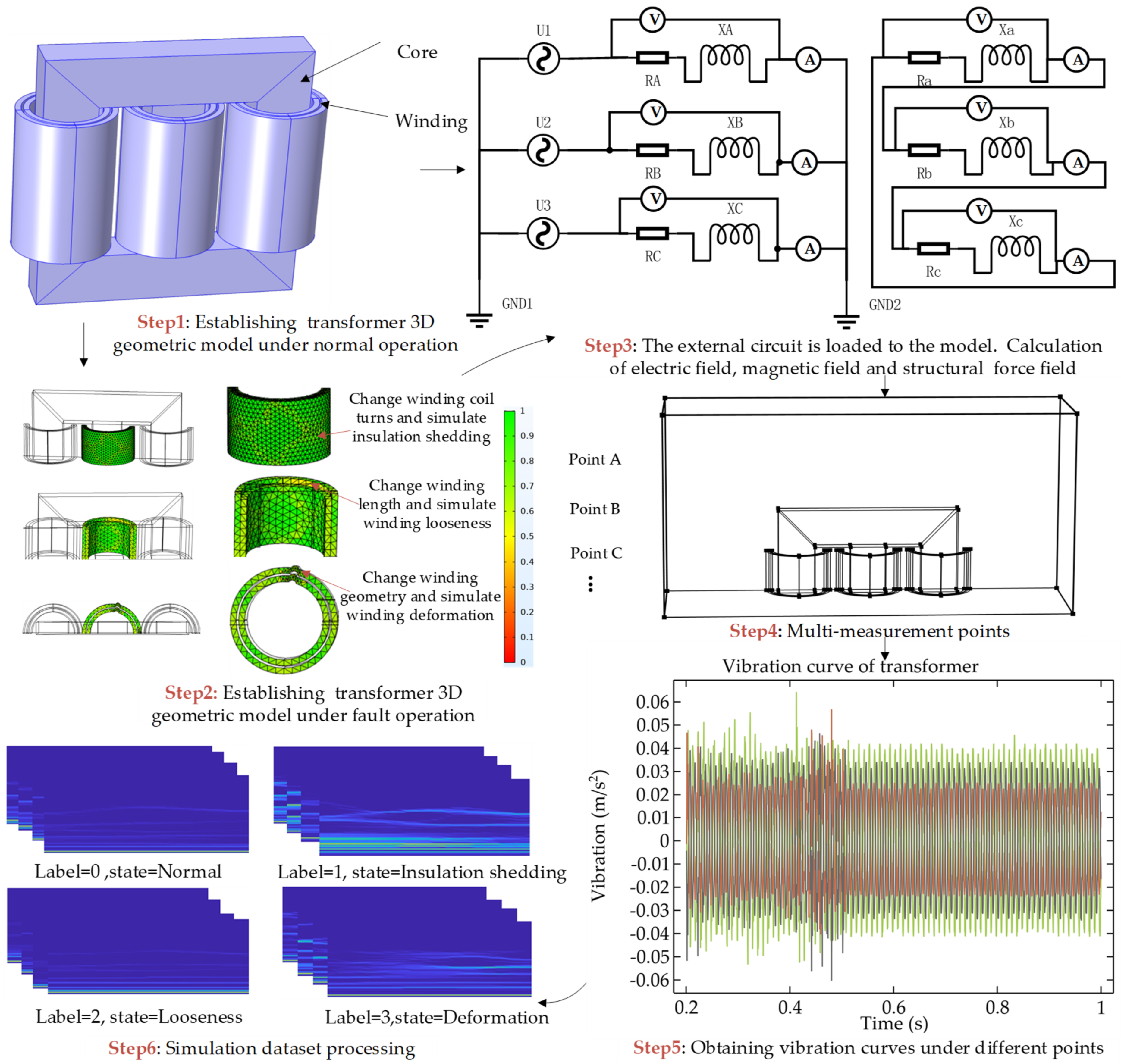
3.2.1. Simulation Model Establishment
- (1)
- The iron core material is silicon steel sheet, and the winding material is copper. In the electromagnetic field, the external circuit is loaded into the electric field model through the field-circuit coupling method. The control equation in the electric field can be established using the following formulawhere is curl operator, is divergence operator; is the vacuum dielectric constant of the free space; is the relative dielectric constant; is the potential; is the conductivity; is the external current density.
- (2)
- Establishing an electromagnetic field coupling model. The external current density is calculated in the electric field, and then it serves as an excitation of the magnetic field, which can be expressed aswhere is the curl operator; is the magnetic vector potential; is the magnetic permeability; and is the relative magnetic permeability.
- (3)
- Realizing the coupling of the electromagnetic field and the structural force field. The current density, magnetic flux density, and magnetic field strength are calculated in the electromagnetic field, and then these variables are used in the structural force field. Thus, physical quantities, including winding vibration acceleration, velocity, and displacement, are calculated.Electromagnetic force is decomposed into three directions, representing three-dimensional space. The formula is as followswhere represent electromagnetic forces in x, y, z directions; , , represent current density in x, y, z directions; , , represent magnetic flux densities in x, y, z directions.The control equation in the structural field can be described aswhere is the mass matrix; is the winding acceleration; is the winding speed; is the damping coefficient matrix; is the stiffness matrix; is the winding displacement; and is the electromagnetic force on the winding.
3.2.2. Simulation Data Set Acquisition and Processing
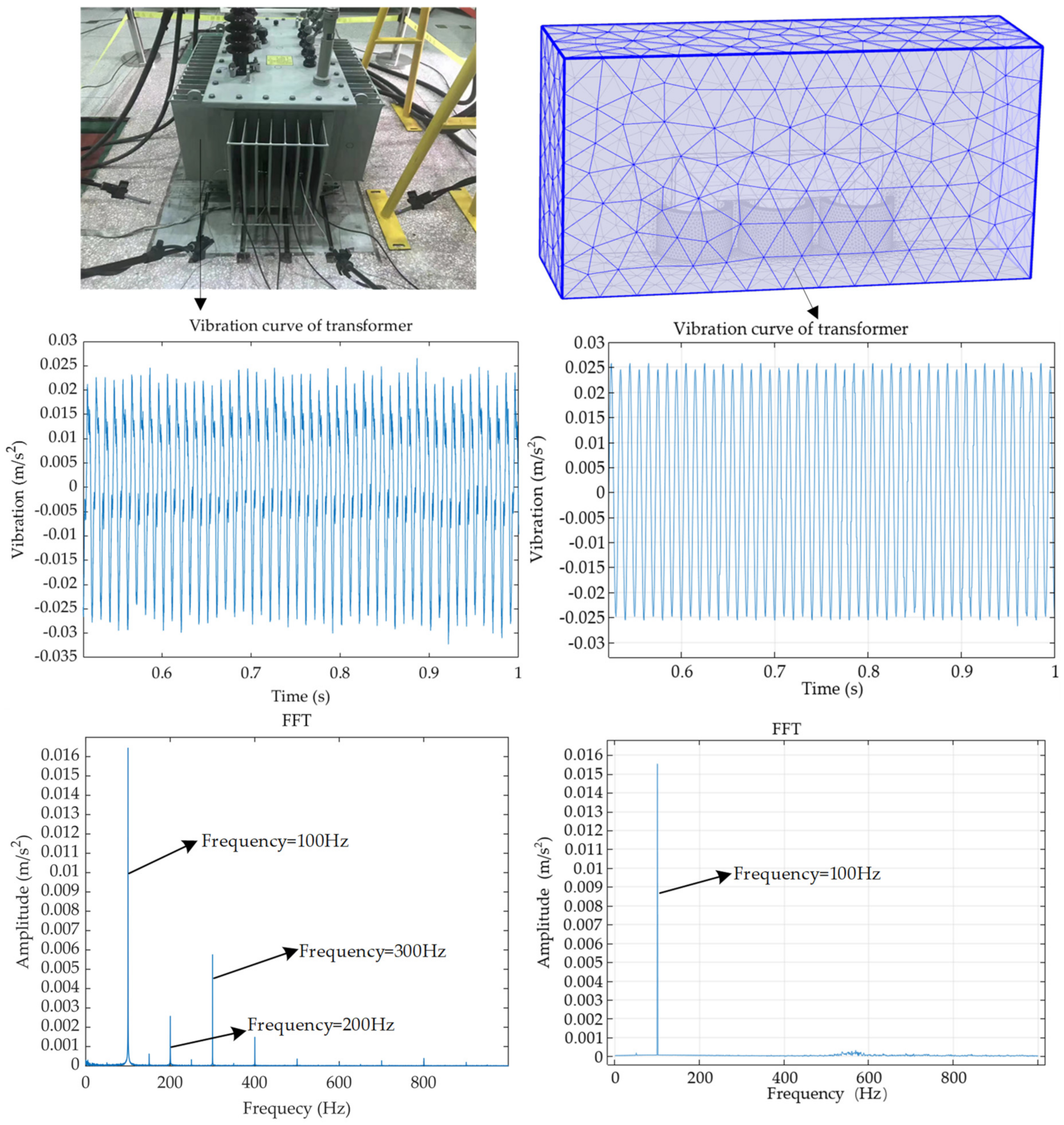
3.3. Simulation and Experimental Data Analysis
4. Results and Comparisons
4.1. SWT and SSGST Combined Time-Frequency Analysis Method
4.1.1. Time-Frequency Analysis Results
4.1.2. Comparison of Diagnosis Performance with Different Time-Frequency Analysis Methods
4.2. TSDen2NetRS Method
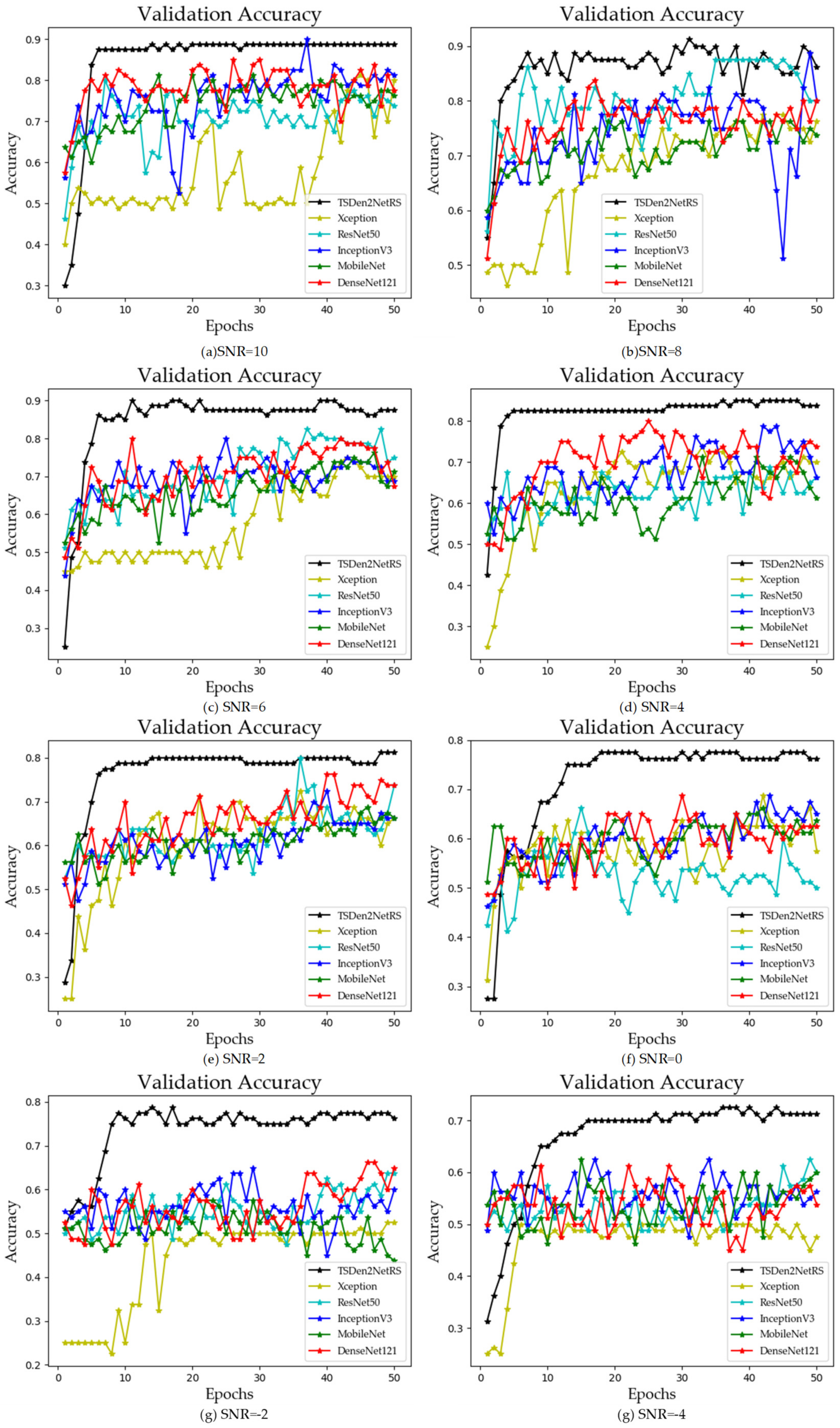
4.2.1. Comparison of Diagnosis Performance with Different Intelligent Diagnosis Methods
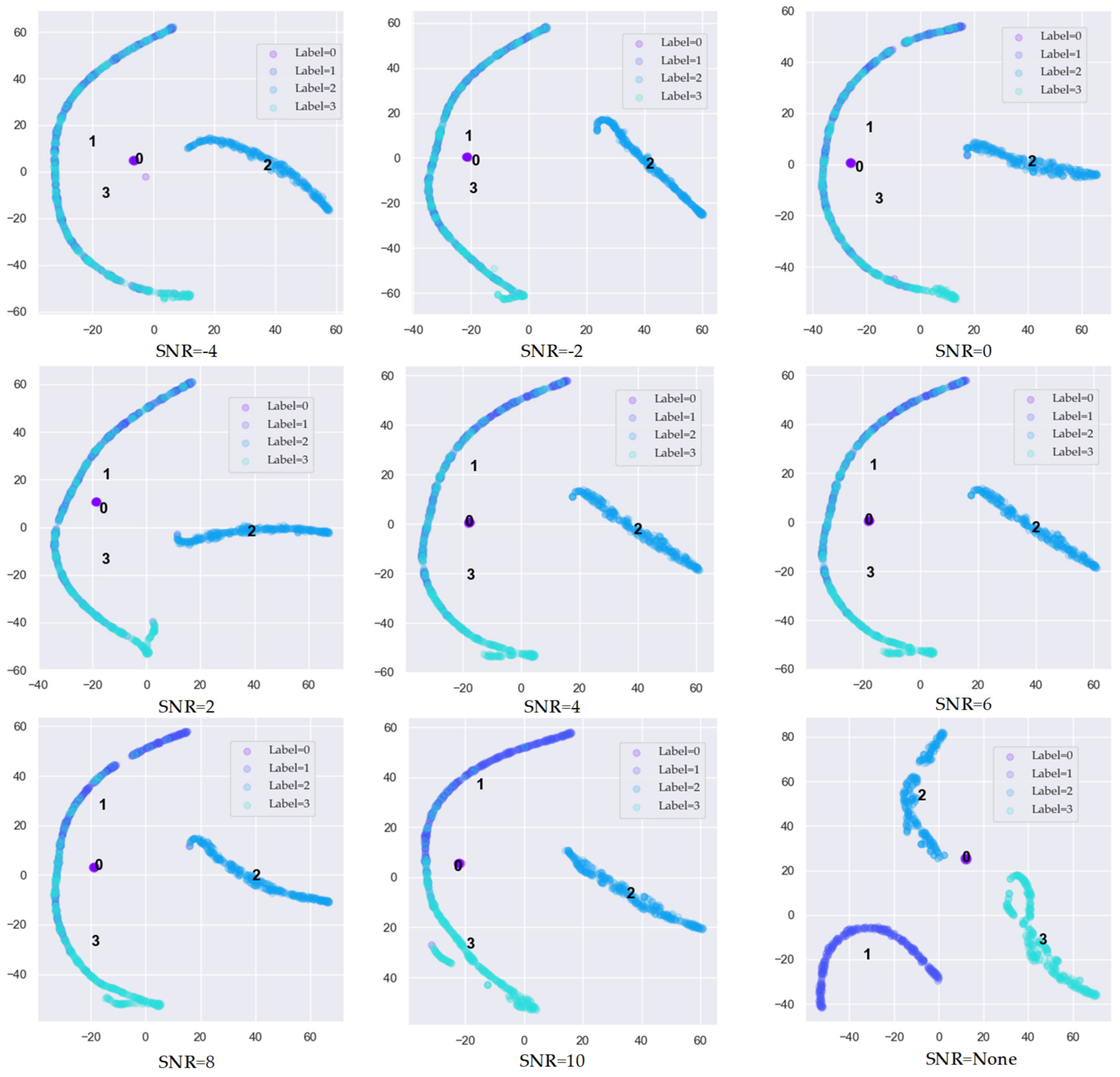
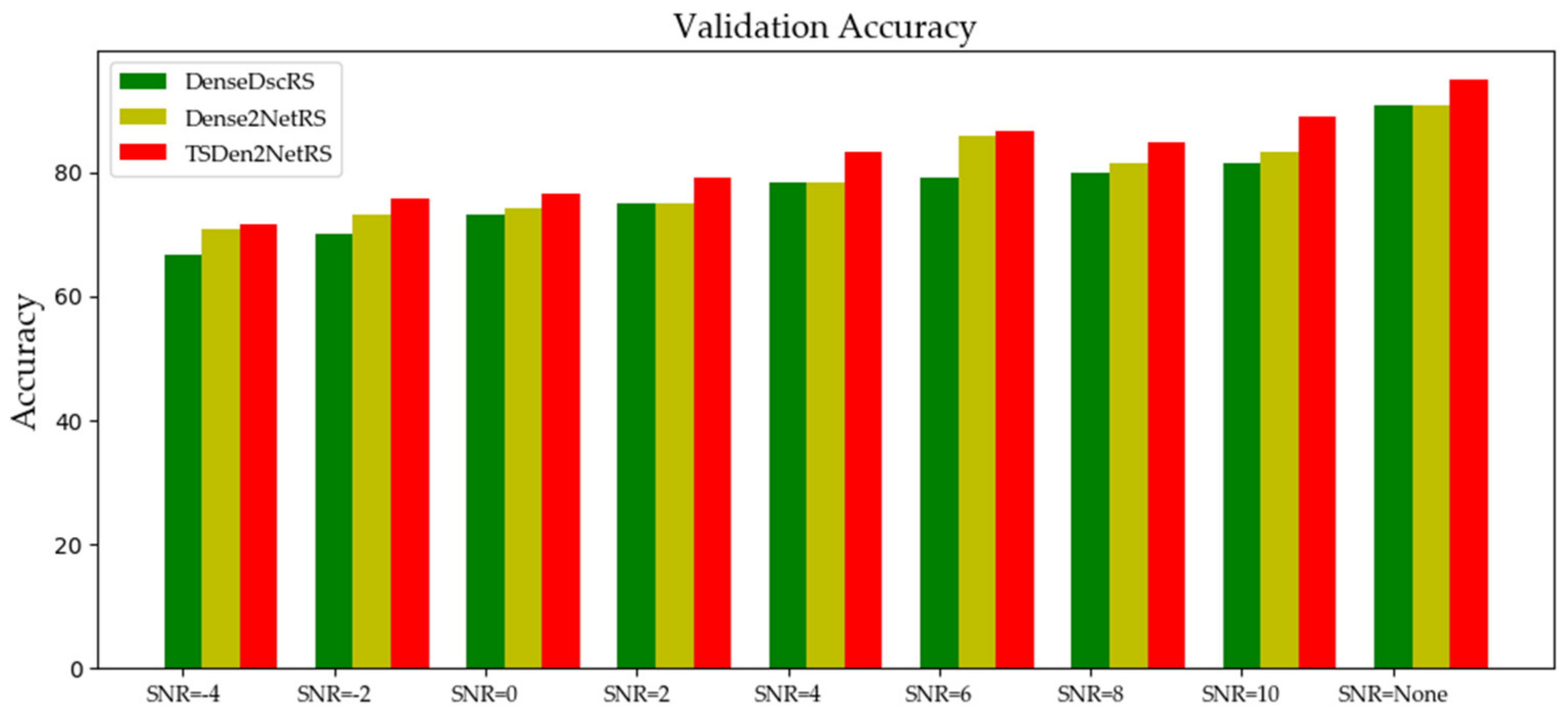
4.2.2. Comparison of Anti-Interference with Different Intelligent Diagnosis Methods
4.3. Adaptive Transfer Learning Method between Different Domains
- (1)
- ImageNet data set: the public data set;
- (2)
- Fusion data set: ImageNet is extracted with the same size, type, and number as the SWT or SSGST time-frequency images and then fusing them;
- (3)
- Stitching data set: ImageNet is extracted with the same size, type, and number as the SWT or SSGST time-frequency images and then stitches them;
- (4)
- Simulation data set: The time-frequency images of the simulation data set generated by COMSOL software.
- (1)
- The network structure is Dense2NetRS signal-stream. The first three lines indicate that when the target data set is the simulation data set, the smaller the value of is, the higher the accuracy of the transfer learning is. The results from the fourth to seventh lines show that when the target data set is the experimental data set, the smaller the value of is, the better the performance of the transfer learning is, which verifies the feasibility of adaptive source data set selection through the domain measurement method. Further, the accuracy in the seventh line of fault diagnosis can be increased from 90.83% to 95.83%.
- (2)
- The network structure is TSDen2NetRS two-stream. The accuracy in the last line of Table 8 increased from 95.00% to 98.33%. The result proves that the adaptive transfer learning method applied to a two-stream network can achieve higher diagnostic accuracy.
5. Conclusions
- (1)
- The results of the time-frequency methods show that the SWT and SSGST combined method can extract more concentrated energy signals, which can better reflect the changes of the signals than the traditional time-frequency methods.
- (2)
- The TSDen2NetRS method results show that the novel method can effectively distinguish different transformer faults in a strong interference environment and greatly improve fault diagnosis accuracy.
- (3)
- The results of the adaptive transfer learning method show that it can automatically select the source domain, which has the closest distribution to the target domain. Moreover, it can greatly improve the diagnosis performance under small samples.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Abbreviations
| TSDen2NetRS | Two-stream Densely Connected Residual Shrinkage network |
| RS layer | Residual Shrinkage layer |
| DGA | Dissolved Gas Analysis |
| SCR | Short-circuit Reactance |
| IRT | Infrared Thermography |
| FRA | Frequency Response Analysis |
| STFT | Short-time Fourier Transform |
| VMD | Variational Mode Decomposition |
| WT | Wavelet Transform |
| SWT | Synchrosqueezed Wavelet Transform |
| SVM | Support Vector Machine |
| KNN | K-Nearest Neighbor |
| RVM | Relevance Vector Machine |
| MKSVM | Multiple Kernel Support Vector Machine |
| VGG | Visual Geometry Group |
| SSGST | Synchrosqueezed Generalized S-transform |
| CABM | Convolutional Block Attention Module |
| TSDen2Net | Two-Stream Efficient Densely Convolutional Network |
| DenseDsc | DenseNet with Depthwise Separable Convolution |
| Dense2Net | DenseNet with Res2Net |
| Dense2NetRS | Dense2Net with RS layer |
| DenseDscRS | DenseDsc with RS layer |
| MCB | Small Circuit Breaker |
| MMD | Maximum Mean Discrepancy |
| TFA | Time-Frequency Analysis |
| GST | Generalized S-Transform |
References
- Wu, Z.; Zhou, L.; Lin, T.; Zhou, X. A New Testing Method for the Diagnosis Winding Faults in Transformer. IEEE Trans. Instrum. Meas. 2016, 69, 9203–9214. [Google Scholar] [CrossRef]
- Wang, S.; Wang, S.; Zhang, N.; Yuan, D.; Qiu, H. Calculation and analysis of mechanical characteristics of transformer windings under short-circuit condition. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Bagheri, S.; Moravej, Z.; Gharehpetian, G. Classification and discrimination among winding mechanical defects, internal and external electrical faults, and inrush current of transformer. IEEE Trans. Ind. Informat. 2018, 14, 484–493. [Google Scholar] [CrossRef]
- Khan, S.; Equbal, M.; Islam, T. A comprehensive comparative study of DGA based transformer fault diagnosis using fuzzy logic and ANFIS models. IEEE Trans. Dielectr. Elect. Insul. 2015, 22, 590–596. [Google Scholar] [CrossRef]
- Liu, Y.; Ji, S.; Yang, F.; Cui, Y.; Zhu, L.; Rao, Z.; Ke, C.; Yang, X. A study of the sweep frequency impedance method and its application in the detection of internal winding short circuit faults in power transformers. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2046–2056. [Google Scholar] [CrossRef]
- Li, Y.; Yan, X.; Wang, C.; Yang, Q. Eddy Current Loss Effect in Foil Winding of Transformer Based on Magneto-Fluid-Thermal Simulation. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Soleimanni, M.; Faiz, J.; Nasab, P.; Moallem, M. Temperature Measuring-Based Decision-Making Prognostic Approach in Electric Power Transformers Winding Failures. IEEE Trans. Instrum. Meas. 2020, 69, 6995–7003. [Google Scholar] [CrossRef]
- Kim, J.; Park, B.; Jeong, S.; Kim, S.; Park, P. Fault diagnosis of a Power Transformer Using an Improved Frequency-Response Analysis. IEEE Trans. Power Del. 2005, 20, 169–177. [Google Scholar] [CrossRef]
- Duan, J.; He, Y.; Wu, W. Fault localization on transformer winding by frequency response analysis and evidential reasoning. J. Eng. 2019, 2019, 9079–9082. [Google Scholar] [CrossRef]
- Hu, Y.; Zheng, J.; Huang, H. Experimental Research on Power Transformer Vibration Distribution under Different Winding Defect Conditions. Electronics 2019, 8, 842–861. [Google Scholar] [CrossRef] [Green Version]
- Bhide, R.; Srinivas, M.; Banerjee, A.; Somakumar, R. Analysis of Winding Inter-Turn Fault in Transformer: A Review and Transformer Models. In Proceedings of the 2010 IEEE International Conference on Sustainable Energy Technologies, Kandy, Sri Lanka, 6–9 December 2010; pp. 1–7. [Google Scholar]
- Hong, K.; Huang, H.; Fu, Y.; Zhou, J. A vibration measurement system for health monitoring of power transformers. Measurement 2016, 93, 135–147. [Google Scholar] [CrossRef]
- Wu, S.; Huang, W.; Kong, F.; Wu, Q.; Zhou, F.; Zhang, R.; Wang, Z. Extracting power transformer vibration features by a time-scale-frequency analysis method. J. Electromagn. Anal. Appl. 2010, 2, 31–38. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Yang, N.; Chen, W. Deep-learning-based fault classification using Hilbert-Huang transform and convolutional neural network in power distribution system. IEEE Sens. J. 2010, 19, 6905–6913. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, C.; Xie, S.; Lu, M. Novel Fault Location for High Permeability Active Distribution Networks Based on Improved VMD and S-transform. IEEE Access 2021, 9, 17662–17671. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly Accurate Machine Fault Diagnosis Using Deep Transfer Learning. IEEE Trans. Ind. Inform. 2019, 15, 2446–2455. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Auger, F.; Flandrin, P.; Lin, Y.; McLaughlin, S.; Meignen, S.; Oberlin, T.; Wu, H. Time-Frequency Reassignment and Synchrosqueezing: An Overview. IEEE Signal Process. Mag. 2013, 30, 32–41. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Gao, J.; Liu, N.; Jiang, X. High-Resolution Seismic Time-Frequency Analysis Using the Synchrosqueezing Generalized S-Transform. IEEE Geosci. Remote Sens. Lett. 2018, 15, 374–378. [Google Scholar] [CrossRef]
- Zhang, H.; Berg, A.; Maire, M.; Malik, J. SVM-KNN: Discriminative Nearest Neighbor Classification for Visual Category Recognition. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 2, pp. 2126–2136. [Google Scholar]
- Zhao, C.; He, Y.; Jiang, S.; Wang, T.; Yuan, L.; Li, B. Transformer Fault Diagnosis Method Based on Self-Powered RFID Sensor Tag, DBN, and MKSVM. IEEE Sens. J. 2019, 19, 8202–8212. [Google Scholar]
- Wang, T.; He, Y.; Shi, T.; Li, B. Transformer Health Management Based on Self-Powered RFID Sensor and Multiple Kernel RVM. IEEE Trans. Instrum. Meas. 2019, 68, 818–828. [Google Scholar] [CrossRef]
- Hinton, G.; Osindero, E.; Teh, Y. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Wen, L.; Gao, L.; Li; X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. 2017, 49, 136–144. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A new convolutional neural network-based data-driven fault diagnosis method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-time motor fault detection by 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Chen, C.; Liu, Z.; Yang, G.; Wu, C.; Ye, Q. An Improved Fault Diagnosis Using 1D-Convolutional Neural Network Model. Electronics 2021, 10, 59–78. [Google Scholar] [CrossRef]
- Liu, R.; Wang, F.; Yang, B.; Qin, S. Multiscale Kernel Based Residual Convolutional Neural Network for Motor Fault Diagnosis under Nonstationary Conditions. IEEE Trans. Ind. Inform. 2020, 16, 3797–3806. [Google Scholar] [CrossRef]
- Zhao, M.; Zhong, S.; Fu, X.; Tang, B.; Pecht, M. Deep Residual Shrinkage Networks for Fault diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 4681–4690. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Li, G.; Zhang, M.; Li, J.; Lu, F.; Tong, G. Efficient densely connected convolutional neural networks. Pattern Recognit. 2021, 109, 107610. [Google Scholar] [CrossRef]
- Miao, M.; Liu, C.; Yu, J. Adaptive Densely Connected Convolutional Auto-Encoder-Based Feature Learning of Gearbox Vibration Signals. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar]
- Zhou, W.; Chen, Y.; Liu, C.; Yu, L. GFNet: Gate Fusion Network with Res2Net for Detecting Salient Objects in RGB-D Images. IEEE Signal Process. Lett. 2020, 27, 800–804. [Google Scholar] [CrossRef]
- Gao, S.; Cheng, M.; Zhao, K.; Zhang, X.; Yang, M.; Torr, P.H.S. Res2net: A new multi-scale backbone architecture. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 652–662. [Google Scholar] [CrossRef] [Green Version]
- He, W.; He, Y.; Li, B. Generative Adversarial Networks with Comprehensive Wavelet Feature for Fault Diagnosis of Analog Circuits. IEEE Trans. Instrum. Meas. 2020, 69, 6640–6650. [Google Scholar] [CrossRef]
- Chen, Z.; He, G.; Li, J.; Liao, Y.; Gryllias, K.; Li, W. Domain Adversarial Transfer Network for Cross-Domain Fault Diagnosis of Rotary Machinery. IEEE Trans. Instrum. Meas. 2020, 69, 8702–8712. [Google Scholar] [CrossRef]
- Liu, J.; Ren, Y. A General Transfer Framework based on Industrial Process Fault Diagnosis under Small Samples. IEEE Trans. Ind. Inform. 2020, 17, 6073–6083. [Google Scholar] [CrossRef]
- Geißler, D.; Leibfried, T. Short-Circuit Strength of Power Transformer Windings-Verification of Tests by a Finite Element Analysis-Based Model. IEEE Trans. Power. Del. 2017, 32, 1705–1712. [Google Scholar]
- Liu, S.; Liu, Y.; Li, H.; Lin, F. Diagnosis of transformer winding faults based on FEM simulation and on-site experiments. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 3752–3760. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, B.; Xu, W.; Wang, S.; Wang, G.; Huangfu, Y.; Zhang, J. Dynamic Deformation Analysis of Power Transformer Windings in Short-Circuit Fault by FEM. IEEE Trans. Appl. Sup. 2013, 24, 1–4. [Google Scholar] [CrossRef]
- Deng, L.; Sun, Q.; Jiang, F.; Wang, S.; Jiang, S.; Xiao, H.; Peng, T. Modeling and Analysis of Parasitic Capacitance of Secondary Winding in High-Frequency High-Voltage Transformer Using Finite-Element Method. IEEE Trans. Appl. Sup. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Shadmand, B.; Balog, S. A Finite-Element Analysis Approach to Determine the Parasitic Capacitances of High-Frequency Multiwinding Transformers for Photovoltaic Inverters. In Proceedings of the 2013 IEEE Power and Energy Conference at Illinois (PECI), Urbana, IL, USA, 22–23 February 2013; Volume 28, pp. 114–119. [Google Scholar]
- Orosz, T.; Pánek, D.; Karban, P. FEM Based Preliminary Design Optimization in Case of Large Power Transformers. Appl. Sci. 2020, 10, 1361–1379. [Google Scholar] [CrossRef] [Green Version]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; loffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Howard, A.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Output | DenseDsc | Dense2Net |
|---|---|---|---|
| Conv1 | 64 × 64 | 3 × 3, stride 1 | 3 × 3, stride 1 |
| Dense Block1 | 64 × 64 | DenseDsc × 6 | Dense2Net × 6 |
| Transition layer | 32 × 32 | Conv 1 × 1 and Average pool, stride 2 | Conv 1 × 1 and Average pool, stride 2 |
| Dense Block2 | 32 × 32 | DenseDsc × 12 | Dense2Net × 12 |
| Transition layer | 16 × 16 | Conv 1 × 1 and Average pool, stride 2 | Conv 1 × 1 and Average pool, stride 2 |
| Dense Block3 | 16 × 16 | DenseDsc × 24 | Dense2Net × 24 |
| Transition layer | 8 × 8 | Conv 1 × 1 and Average pool, stride 2 | Conv 1 × 1 and Average pool, stride 2 |
| Dense Block4 | 8 × 8 | DenseDsc × 16 | Dense2Net × 16 |
| Pooling | 4 × 4 | Average pool, stride 2 | Average pool, stride 2 |
| Concatenate | - | Concatenate | |
| CABM | - | Channel and attention spatial attention | |
| Classification | - | FC and softmax | |
| Name | Value | Name | Value |
|---|---|---|---|
| Transformer model | TDG-200/10-0.4 kV | Link group label | Dyn11 |
| High/low-voltage winding turns | 1732/40 | High/Low-voltage winding current(A) | 11.5/288.7A |
| High/low-voltage side rated voltage | 10/0.4 kV | Impedance voltage/% | 4.0 |
| Low-voltage winding outer diameter/(mm) | 251 mm | High-voltage winding outer diameter/(mm) | 368 mm |
| Low-voltage winding height/(mm) | 403 mm | High-voltage winding height/(mm) | 425 mm |
| Type | Label | Data Set | SWT/SSGST Time-Frequency Images | ||
|---|---|---|---|---|---|
| Simulation | Experiment | Simulation | Experiment | ||
| Normal | 0 | 3000 | 300 | 3000 | 300 |
| Insulation shedding | 1 | 3400 | 300 | 3400 | 300 |
| Looseness | 2 | 3000 | 300 | 3000 | 300 |
| Deformation | 3 | 3600 | 300 | 3600 | 300 |
| Total number | - | 13,000 | 1200 | 13,000 | 1200 |
| TFA | STFT | CWT | GST | SWT | SSGST |
|---|---|---|---|---|---|
| Rényi entropies | 19.6057 | 16.3274 | 16.1428 | 15.3513 | 12.5701 |
| Type | Method | Test Accuracy (Simulation Data Set) | Test Accuracy (Experimental Data Set) |
|---|---|---|---|
| (1) (with one-dimensional vibration data) | One-dimensional data | 94.11% (960/1020) | 88.33% (106/120) |
| (2) (with single visualization feature extraction) | STFT | 91.47% (933/1020) | 89.16% (107/120) |
| CWT | 92.94% (948/1020) | 88.33% (106/120) | |
| GST | 96.08% (980/1020) | 87.50% (105/120) | |
| SWT | 96.18% (981/1020) | 90.83% (109/120) | |
| SSGST | 96.57% (985/1020) | 90.83% (109/120) | |
| (3) (with combined visualization feature extraction) | SWT+ SSGST | 97.25% (992/1020) | 95.00% (114/120) |
| Type | Setting |
|---|---|
| Initial learning rate | 0.001 |
| Learning rate schedule | piecewise |
| Mini batch size | 32 |
| Max epochs | 20 |
| Learning rate drop period | 25 |
| Learning rate drop factor | 0.2 |
| Execution environment | GPU |
| Optimizer | Adam |
| Verbose | 0 |
| Type | Method | Test Accuracy (Simulation Data Set) | Test Accuracy (Experimental Data Set) |
|---|---|---|---|
| (1) Traditional intelligent classification method | SVM | 65.10% (664/1020) | 84.17% (101/120) |
| KNN | 90.69% (925/1020) | 88.33% (106/120) | |
| (2) Deep learning method (CNNS) | Xception | 96.56% (985/1020) | 90.83% (109/120) |
| ResNet50 | 91.17% (930/1020) | 81.67% (95/120) | |
| InceptionV3 | 93.33% (952/1020) | 91.67% (110/120) | |
| MobileNet | 93.53% (954/1020) | 92.50% (111/120) | |
| DenseNet121 | 91.67% (935/1020) | 89.17% (107/120) | |
| TSDen2NetRS | 97.25% (992/1020) | 95.00% (114/120) |
| Network | Domain | MMD | WD | Transfer Accuracy | |
|---|---|---|---|---|---|
| (1) Single- stream (Dense2NetRS) | ImageNet-Simulation | 0.8379 | 108.79 | 1.9174 | 96.96% (989/1020) |
| Fusion-Simulation | 0.6937 | 20.09 | 0.8877 | 97.64% (996/1020) | |
| Stitching-Simulation | 0.7973 | 57.48 | 1.3641 | 97.45% (994/1020) | |
| ImageNet-Experiment | 0.7868 | 112.85 | 1.9074 | 91.67% (110/120) | |
| Fusion-Experiment | 0.5760 | 20.75 | 0.7777 | 92.50% (111/120) | |
| Stitching-Experiment | 0.7173 | 60.27 | 1.3128 | 91.67% (110/120) | |
| Simulation-Experiment | 0.4915 | 8.65 | 0.5731 | 95.83% (115/120) | |
| (2) Two-stream (TSDen2NetRS) | Simulation-Experiment | 0.4915 | 8.65 | 0.5731 | 98.33% (118/120) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; He, Y.; Wang, L. Adaptive Transfer Learning Based on a Two-Stream Densely Connected Residual Shrinkage Network for Transformer Fault Diagnosis over Vibration Signals. Electronics 2021, 10, 2130. https://doi.org/10.3390/electronics10172130
Liu X, He Y, Wang L. Adaptive Transfer Learning Based on a Two-Stream Densely Connected Residual Shrinkage Network for Transformer Fault Diagnosis over Vibration Signals. Electronics. 2021; 10(17):2130. https://doi.org/10.3390/electronics10172130
Chicago/Turabian StyleLiu, Xiaoyan, Yigang He, and Lei Wang. 2021. "Adaptive Transfer Learning Based on a Two-Stream Densely Connected Residual Shrinkage Network for Transformer Fault Diagnosis over Vibration Signals" Electronics 10, no. 17: 2130. https://doi.org/10.3390/electronics10172130
APA StyleLiu, X., He, Y., & Wang, L. (2021). Adaptive Transfer Learning Based on a Two-Stream Densely Connected Residual Shrinkage Network for Transformer Fault Diagnosis over Vibration Signals. Electronics, 10(17), 2130. https://doi.org/10.3390/electronics10172130