Abstract
This paper presents a state-of-the-art review of electric vehicle technology, charging methods, standards, and optimization techniques. The essential characteristics of Hybrid Electric Vehicle (HEV) and Electric Vehicle (EV) are first discussed. Recent research on EV charging methods such as Battery Swap Station (BSS), Wireless Power Transfer (WPT), and Conductive Charging (CC) are then presented. This is followed by a discussion of EV standards such as charging levels and their configurations. Next, some of the most used optimization techniques for the sizing and placement of EV charging stations are analyzed. Finally, based on the insights gained, several recommendations are put forward for future research.
1. Introduction
Electric Vehicles (EVs) are experiencing rapid growth because of five key global trends: (i) Fossil fuel depletion and subsequent increases in fuel cost; (ii) Growing public awareness of and desire to combat climate change; (iii) Advances in technology and commercial effectiveness of renewable energy technologies; (iv) The development of electric motors and electronic control systems that control EV propulsion directly; and (v) Advances in EV supporting technologies such as Grid-to-Vehicle (G2V) and Vehicle-to-Grid (V2G).
The world is facing pressure on fossil fuels, so most countries are moving towards sustainable, reliable, efficient, economic, and green energy resources. Fossil fuels are one of the main threats to Earth’s environment as they contribute to many CO2 emissions. Figure 1 shows the percentage contribution of CO2 emissions by the (i) electricity and heat sector, (ii) transportation sector, (iii) industry sector, (iv) residential sector, and (v) other areas, according to the International Energy Agency [1].
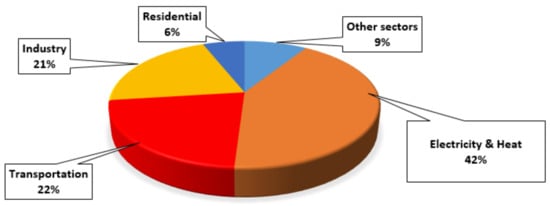
Figure 1.
CO2 emissions by different sectors.
Transportation is one of the significant emission sectors, contributing to 22% of the total CO2 emissions in 2020 [1]. Most public and personal vehicles run on Internal Combustion Engines (ICE), which can be considered as one of the major causes of climate change. On the other hand, EVs do not directly emit CO2 or are less susceptible to the high oil price.
To overcome the global emissions problem, most electric utility industries should move towards renewable resources, e.g., wind, solar, and wave/tidal. As an example, the Chinese government aims to install 150–180 GW of wind power and 20 GW of Photovoltaics (PV) power generations by 2020 [2,3]. The contribution of PV-based energy generation was less than 1% to U.S. electricity production in 2015. Still, due to the decreasing PV panel cost, solar energy production will continue to grow. It is projected that solar could contribute nearly 15% of U.S. energy demand until 2030 and 30% by 2050 [4,5].
The advancement of EV technology has increased the social and economic benefits in both the transportation and energy sector. Despite these benefits, battery technology limitations such as weight, lifespan, and storage capacity, and high battery cost [6,7] are still the major hindrances to the broad acceptance of EVs. However, many automotive industries, organizations, and countries are investing in the research and development of EV battery technology. For example, Google spent $10 million, and the U.S. government spent $2 billion on the development of an EV battery [3,8,9]. Moreover, the U.S. government has committed to bringing one million Plug-in EVs onto the road in the next five years. Considering the research and development in EV industries, according to the Australian Energy Market Commission (AEMC) global trend of increasing EV and decreasing ICE sales is also present. In Australia, the EV sale in 2019 was 6718, a 203% increase compared to 2018 [10,11].
Likewise, in recent years, the New Zealand government has set the target for the transition to 100% renewable electricity by 2035. In New Zealand 85% of electricity generation is based on renewable: 60% hydro, 18% geothermal, 5% wind, 2% biomass, and 15% is a fossil fuel, as shown in Figure 2. New Zealand’s strong point is the wide mix of renewables such as hydro, geothermal, wind, and biomass for electricity generation. As 30% of the fossil fuel is consumed by the transportation sector [12], this offers a good opportunity to transition from fossil fuels to renewable energy by using technology, such as the electric vehicle.
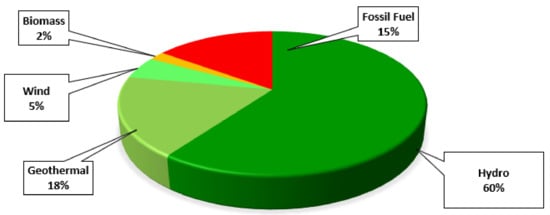
Figure 2.
Total Electricity Generation in New Zealand.
This review paper investigates present EV technologies in connection with several existing charging methods and standards. The key contributions of the paper are the thorough review and discussion of EV and related technologies, including:
- (i)
- Charging standards as defined by the Society of the Automotive Engineers (SAE);
- (ii)
- EV charging systems such as on-board and off-board chargers, and
- (iii)
- Optimization techniques for sizing and placement of EV charging stations under different objectives and constraints.
2. Vehicle Technology
The main issue with ICE vehicles is fossil fuel consumption along with rising fuel prices and this causes two main problems: energy security and CO2 emission to the environment. According to the observatory of economic complexity at the MIT media lab, oil is the spark of life for humans and is imported from politically unstable countries [13]. Considering the pressure on fossil fuels and increment in the CO2 emission, EVs reduce the reliance on transportation on crude oil and reduce Greenhouse Gas Emissions (GHG) emissions.
The vehicle technology is typically divided into four main categories [14,15] shown in Figure 3; moving from left to right is an electrification increase. The sources of energy for a conventional vehicle are petrol or diesel fuel, which are the main contributors of carbon radiation in the environment. Therefore, the carbon emission rate of a hybrid is less than for conventional combustion engine vehicles. The third and fourth types are also known as zero-emission vehicles (measured at the tailpipe) which depend on the hydrogen fuel cell and battery, respectively. The details of the different technologies will be discussed in the sections below.
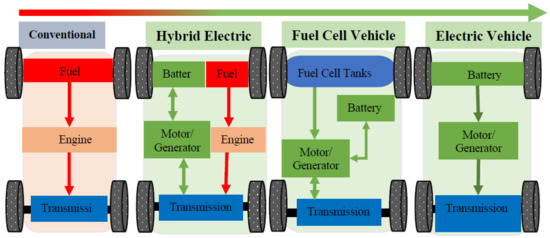
Figure 3.
Electrification of Transportation.
2.1. Hybrid Electric Vehicle
Hybrid Electric vehicles (HEV) have an ICE engine and a battery, both of which are used to propel the vehicle; thus, the source of energy can be a battery and/or ICE. As such, the HEV is also known as a dual-power-source vehicle. HEVs are better for urban driving because the battery can be recharged by recapturing the vehicle’s kinetic energy into the battery through regenerative braking. In urban driving, the vehicle often does start and stop. Therefore, HEVs are better for urban driving than rural or highway. Since the fully electric vehicle is in the early development stage, HEVs seem to be the most cost-effective solution so far, probably for the next decade [15]. To minimize pollution, the HEV uses the ICE engine and electric motor in the most efficient way to save energy. The advantages of HEVs are as follows [16,17,18]:
- (i)
- Improved fuel efficiency and performance.
- (ii)
- Lower fuel consumption costs.
- (iii)
- Reduce CO2 emission.
- (iv)
- Recovery of some energy via regenerative braking.
- (v)
- Use of an existing fuel station.
- (vi)
- The disadvantage is a higher initial cost due to the battery.
The drivetrain is a collection of components that provides the power from the vehicle’s battery or vehicle’s engine to the vehicle’s wheel. There are three types of HEV drivetrains: (i) series hybrid, (ii) parallel hybrid, and (iii) series-parallel hybrid [19,20]. The simplest configuration is the series drivetrain which provides power to the electric motor. The motor obtains power either from a generator run by a diesel/petrol engine or from the battery pack while, in the parallel drivetrain, the ICE and motor work in parallel to generate power that propels the vehicle. However, the series-parallel hybrid merges the complication and advantages of both series and parallel drivetrains. Toyota Prius is an example of a series-parallel hybrid. The authors in [21] used the series-parallel hybrid vehicle consisting of the control, combustion engine, electrical system, and power split device is used as shown in Figure 4.
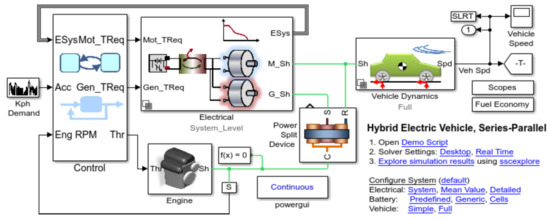
Figure 4.
The Hybrid Electric Vehicle, Series-Parallel.
The controller obtains motor speed, generator speed, brake, and acceleration information from the vehicle dynamics. The electrical section obtains generator torque and motor torque from the controller, deciding when to charge and discharge the battery. Whenever a driver applies the brakes, the motor acts becomes a generator and starts to charge the battery; this is called regenerative braking [22,23]; otherwise, it will consume power from a battery. The electrical section consists of a synchronous motor and drive, a synchronous generator and drive, a DC-DC converter, and a battery bank.
The ICE obtains the throttle position from the controller used to regulate the amount of fuel or air entering the engine. As shown in Figure 4, the power split device is the brain of a hybrid vehicle that controls how the gasoline engine, generator, and electric motor work together. It allows the car to operate in series or parallel (independently, both the motor and ICE engine and both can power up the car) [22]. The vehicle dynamic provides vehicle speed which depends upon the vehicle body, road inclination, and wind resistance. Typical HEVs have four modes of operation [24], as shown in Figure 5.
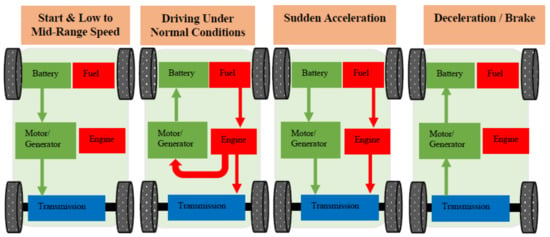
Figure 5.
Hybrid Electric Vehicle mode of operations.
The modes of operations are as follows:
- (i)
- Start and Low to Mid-range Speeds: During low to mid-range speeds or at the vehicle’s starting, the engine stops, and the vehicle is propelled by the motor alone.
- (ii)
- Driving Under Normal Conditions: The power split device sends some power to run the generator and the rest of the power to drive the wheels directly. If there is excessive power, then it’s used to charge the battery.
- (iii)
- Sudden Acceleration: Both the battery and engine provide power during sudden acceleration.
- (iv)
- Deceleration: The regenerative braking system converts the kinetic energy into electrical energy that is stored in the high-performance battery.
2.2. Electric Vehicle (EV)
Due to the potential benefits of EVs, the authors [25] transformed the series-parallel hybrid into the fully EV as shown in Figure 6, which can take the real EV movement data and predict the State of Charge (SOC) of vehicles according to road inclination, vehicle weight, and wind resistance.
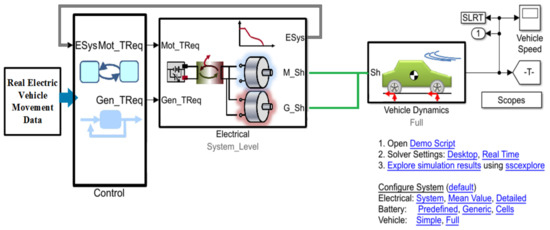
Figure 6.
Proposed Electric Vehicle model.
The fully EV uses only a battery power pack to propel the vehicle. Therefore, EVs are better for combatting global warming as compared to HEVs. The EVs use only the battery to operate the motor which propels the vehicle and have a regenerative braking system to recapture vehicles’ kinetic energy into electrical energy to be stored in the battery. Therefore, EVs are better for urban driving because in urban driving, the vehicle frequently starts and stops, during which the vehicle recaptures some of the kinetic energy into the battery. As compared to typical HEVs, the EVs have only two modes of operation, which are as follows (see Figure 7):
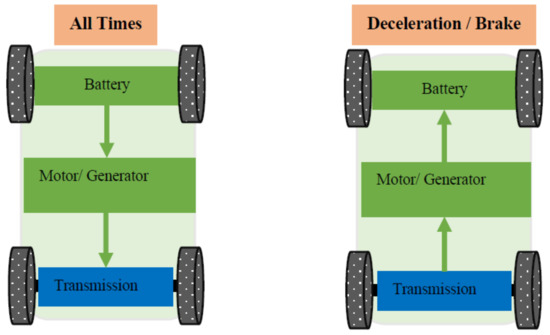
Figure 7.
Electric Vehicle mode of operations.
- (i)
- All times: Whenever the vehicle needs to move, the battery propels the vehicle.
- (ii)
- Deceleration or Braking: When the vehicle decelerates or brakes, the vehicle recaptures the kinetic energy into the battery using regenerative technology.
2.3. Fuel Cell Electric Vehicle (FCEV)
Fuel Cell Electric Vehicle (FCEV) uses electric powertrain like EVs; however, hydrogen is used as an energy source in the fuel cell tank. There is no tailpipe pollution; thus, it is considered a zero-emission vehicle. Based on the powertrain configuration, the FCEV is categorized into two types, namely:
- (i)
- Fuel Cell Electric Vehicle.
- (ii)
- Fuel Cell Hybrid Electric Vehicle (FCHEV).
The typical powertrain configurations of FCEV and FCHEV are shown in Figure 8.
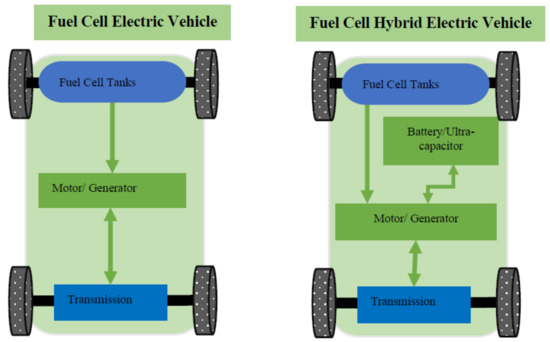
Figure 8.
FCEV and FCHEV Powertrain configurations.
The FCEV is ideal for slow speed with smooth power demand applications such as buses, forklifts, and trams, etc. [26]. Nowadays, FCEV manufacturers such as Hyundai, Toyota, and Honda manufacture high-performance FCEV vehicles in terms of fuel economy and vehicle efficiency by adopting various energy management techniques [27].
However, FCHEV adds another auxiliary Energy Storage System (ESS) or ultracapacitor in the powertrain for high-speed operation, which can be charged and discharged based on the vehicle power demand and supply. The fuel cell tank is used as the main energy source, and ESS or ultracapacitor is used for smooth and efficient operation [28]. The only drawback of the FCHEV is the increase in weight due to the extra ESS or ultracapacitor in the powertrain.
Understanding the EV charging methods is as important as understanding the EV technology described in the above section. Therefore, the next section will briefly describe the existing EV charging methods.
3. EV Charging Methods
Battery exchange, wireless charging, and conductive charging are the three main charging techniques. The conductive charging is further divided into pantograph (Bottom-up and Top-down) and overnight charging, as shown in Figure 9.
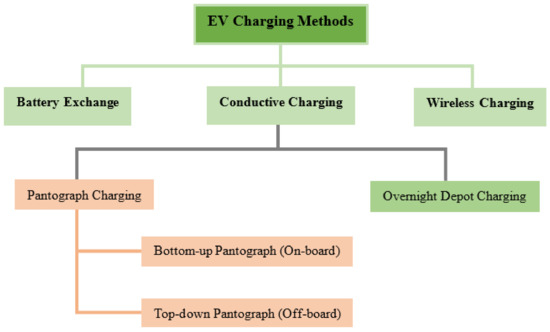
Figure 9.
EV charging methods.
3.1. Battery Swap Station (BSS)
The battery swapping method is also known as “Battery Exchange”, which is based on paying monthly rent for the battery to the BSS owner. The slow charging method of the BSS helps to extend the battery life [29]. It is much easier to integrate the locally generated Renewable Energy Sources (RESs) such as Solar and Wind with the BSS system. One of the main advantages of this technique is the drivers do not need to get out of the vehicle and can replace the discharged battery very quickly. Moreover, the battery kept at the station can participate in the V2G (vehicle-to-grid) initiative [30,31].
However, due to high monthly rental fees charged by the BSS owner, this type of EV charging technique can be more costly than the fueling of the ICE engine because the BSS owner owns the EV batteries. This technique requires multiple expensive batteries as well as a sizeable area in which to store them which may require expensive real estate in a high traffic area. Also, the station may have a particular model of the battery, but the vehicles may have different battery standards [32,33].
3.2. Wireless Power Transfer (WPT)
This technology is based on electromagnetic induction and uses two coils. The primary coil is placed on the road’s surface, and the secondary coil is placed inside the vehicle. Recently, WPT technology has gained attention in EV applications because of its ability to enable the EV to recharge safely and conveniently. Also, it does not require a standard connector (but does require a standard coupling technology) and can charge even while the vehicle is in motion [34].
However, the inductive power transfer is generally weak, and the air gap between the transmitter and receiver coils should be in the range of 20 to 100 cm for efficient power transmission [35]. Moreover, eddy current loss is another issue in the WPT if the transmitter coil is not turned off. The information transfer between the transmitter and the EV should be real-time which means communication latency can happen [36].
3.3. Conductive Charging (CC)
Conductive charging requires an electrical connection between the vehicle and charging inlet and provides different charging facilities, e.g., level 1, level 2, and level 3 charging, and has high efficiency in charging due to the direct connection. The two power charging levels (Level 2, 3) are employed for a public charging station. The first two levels (Levels 1 and 2) have less impact on the distribution system.
Conductive charging provides a V2G facility and reduces the grid loss, maintains voltage level, prevents grid power overloading, active power support, and can provide reactive power compensation by using the vehicle’s battery [37,38].
However, level 3 has different impacts on the distribution system such as voltage deviation [39], reliability of the system, and transfer/power loss. It increases not only peak demand but also affects the transformer life [39,40]. It also needs a complex infrastructure, limited access to the electricity grid, and a standard connector/charging level [41]. The V2G technology requires intensive communication between grid and vehicle. Also, the V2G operation reduces the battery lifespan of the battery due to frequent charging and discharging. The charging station types including BSS, WPT, and CC stations are summarized in Table 1.

Table 1.
Summary of reviews on charging methods.
For higher battery capacity and quick charging requirement applications, such as buses and trucks, the following two charging techniques are utilized, as discussed below:
Overnight Depot Charging: The overnight depot charging system can be designed for slow and fast charging. It is usually installed at the end of the lines and used for night-time charging. Thus, slow charging is the most favorable option because of the low charging impact on the distribution grid [46,47]. However, for higher battery capacity with quick charging requirement applications, the Pantograph charging technique is suitable.
Pantograph Charging: This type of charging is one of the opportunities for charging options. This kind of charging infrastructure is used for higher battery capacity and power requirement applications, such as buses and trucks. This charging technique offers less investment in the bus battery thus reducing the bus investment cost, however, the charging infrastructure cost increases [48]. Pantograph charging is further divided into the following two categories:
- (i)
- Top-down Pantograph: The charging setup is mounted on the roof of the bus stop therefore it is commonly known as an off-board top-down pantograph. This method provides high power direct current which is already demonstrated in Singapore, Germany, and the U.S. [49].
- (ii)
- Bottom-up Pantograph: This type of charging method is suitable for those applications where the charging equipment is already installed in the bus. This is also known as an on-board bottom-up pantograph [49].
4. Review of EV Charging Configurations, and Standards
In this section, the EV charging configurations such as on-board and off-board, charging standards including IEC and SAE, and the country-wise EV charging infrastructure and connectors are explained.
4.1. EV Charging Configurations
In the U.S., people typically have a daily driving range of fewer than 100 miles [50]; considering this, charge anxiety is a more serious issue than range anxiety. To overcome the charge anxiety, the off-board charger is a better choice because it generally offers higher kW transfer and removes weight from the vehicle. The off-board charger means the charger is outside of the vehicle and provides DC power to the EV battery pack. The off-board EV charging configuration [51] as shown in Figure 10 uses the IEC mode 4 and SAE level 1 and level 2 (see Table 1).
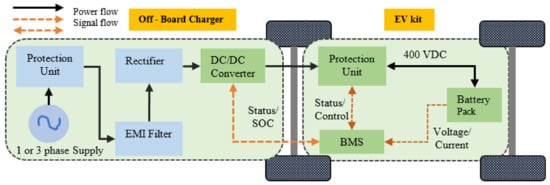
Figure 10.
EV charging configuration for off-board (DC Levels 1 and 2 or Mode 4).
However, the on-board charging offers lower kW transfer and adds weight to the vehicle. Because of the weight, space, and cost constraints the single-phase on-board chargers limit the transfer of high power [52,53]. Therefore, it takes more charging time than the off-board charging configuration. The EV charging configuration for AC (Modes 1 and 2 and Level 1 and 2 for IEC and SAE standard, respectively) requirements with on-board charger is demonstrated in Figure 11 [54,55] and DC charging levels as described in Table 1.
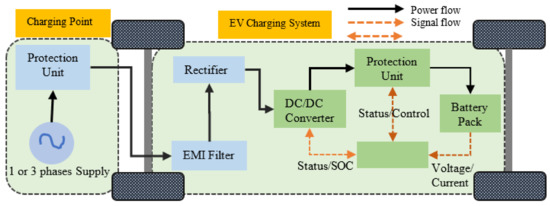
Figure 11.
EV charging configuration for on-board (AC Levels 1 and 2).
Due to the increasing number of EVs the IEC and SAE in [56] proposed AC and DC charging standards for the U.S. and EU considering the voltage levels and current, etc. (see Table 2). The details are further explained in the next subsection.
Table 2.
IEC and SAE standards: Current and voltage level for AC and DC charging.
4.2. EV Charging Standards
Several EV charging standards are utilized around the globe to deal with EV charging infrastructure. For example, the U.S. uses the IEEE and SAE standards, whereas Japan and Europe use a charging standard called CHAdeMO. Standards Administration of China (SAC) uses GB/T standards, similar to the IEC standard. In SAE, the power level is called “Level” whereas, in IEC, the level of power is called “Mode”. The ICE and SAE charging standards are summarized and presented in Table 2.
Charging Level 1/Mode 1 is most used at homes or offices for overnight slow charging. The Level 2/Mode2 and Level 3/Mode 3 charging modes are for both the public and private charging facilities and mode 4 in IEC and SAE is used for fast charging.
5. Optimization Techniques
Optimization is the optimal allocation of the available resources to produce the best design to get the required output. In other words, optimization means finding the values of a variable that maximizes or minimizes the objective function while satisfying the constraints. The integration of RESs and EVs imposes several challenges for the widespread adoption of the smart grid. For example, wind and PV resources are very much irregular [38], and due to the integration of EVs to the smart grid, both demand and supply become more intermittent and cause energy losses in the distribution system [57]. Thus, Distributed Generator (DG) sizing, placement, and EV charging (scheduling) are very complicated unit commitment problems associated with different contradictory constraints and objectives. Therefore, optimization techniques are used to overcome these issues. According to [58], 60% of the total EV being charged during off-peak hours, then energy loss can increase up to 40% depending on the charging strategies. As such, it may jeopardize the stability and reliability of the grid [59]. The proper operation of the EV charging station not only resolves the issue mentioned above but also maximizes the electric EV station profit [60,61,62].
There are numerous optimization methods in the literature; the main three heuristic optimization techniques used in the research of EV charging stations are the Particle Swarm Optimization (PSO), Genetic Algorithm (GA) [63,64,65,66], and Simulated Annealing (SA) [67,68,69] and the integer algorithm such as mixed-integer linear programming (MILP) and Mixed Integer Programming (MIP). These optimization methods are used to accomplish different objectives such as outage management scheme, mismatch issues between the electricity production of DG units and load consumption, energy trade between upstream (Aggregator) and downstream (PL), annual profit maximization of PEV(Plug-in Electric Vehicle)-PL by selling electricity to PEV, sizing and sitting of the fast-charging station, sizing of ESS in a fast-charging station power loss, voltage deviation and to maximize the Parking Lot Owner (PLO) profit maximization by satisfying certain constraints. The following subsections will explain the above mentioned objectives in detail.
5.1. Reliability
The authors in [59] treated the parking deck as an ESS and to quantify the potential contribution of the parking deck a non-sequential Monte Carlo simulation method was proposed. The authors used the output of Wind Turbines (WTs), PVs, and diesel generators and the parking deck available power to improve the reliability of the advanced distribution system during the outage event and introduce stochastic modeling to capture the intermittency of the renewable energy resources. The V2G capable EV charge schedule is formulated as a mixed-integer linear programming (MILP) problem as shown in Equation (1):
The price of electricity for battery charging and the reward given to the EV owner for power discharge are shown in the first and second terms in Equation (1) respectively. Both of the terms are multiplied with the time duration and summed for the whole charging period T = [starting and ending times of charging period], P is the charging/discharging power, b is electricity cost, and is the EVs discharge reward under the feed-in-tariff policy. The batteries of the fleet of EVs are used as an energy storage system to improve the reliability of the system. However, in a practical point of view, very limited EV companies allow the V2G facilities for a specific country because discharging of the batteries can reduce the lifetime which results in the early retirement of the cell. Also, the authors used the National Household Travel Survey (NHTS) data which is not practical EVs data.
5.2. Total Loss
Considering the total loss within the distribution system, the authors proposed a comprehensive optimization model for sizing the PV and WT, Battery Energy Storage System (BESS) units, and the EV charging stations. This proposed model is tested in two real distributed systems, i.e., the Alibeykoy and Hamikoy feeders [32]. The authors also consider the time-varying profile of the load, and the objective can be divided into three sub-objectives; the conditions are as follows:
The authors proposed Equation (2) to calculate the sub-objective function using three conditions; (i) Minimizing the total loss: (A = 1, C = 0); (ii) Maximizing the penetration of overall DG, EV charging station, and BESS within the distribution system (A = 0, C = 0); (iii) Multi-objective combination of both (A = 0, C = 1).
The first term in Equation (2) shows the active power loss of line l in period t per unit (PU). The second term represents the total capacity of DG, EV charging station, and BESS unit of bus i. The third term denotes the difference between active power loss in period t and the total capacity of DG, BESS, and EV charging station units. The authors did not perform any financial analysis however the big size of BESS may cost a lot.
5.3. Maximize the Profit
With the increasing number of EVs and the participation of RESs in the energy market, it helps to create a new business paradigm. Most recently, the authors [70] proposed a state-of-the-art bi-level model for EVs parking lot in a distribution system with renewable energy. The proposed model is programmed by using the two-stage stochastic programming which aims to maximize the profit of the EV parking lot owner. In the first stage, a new model is proposed for EV PLOs which model the EV’S owner uncertainties, and the second stage minimizes the overall system cost while satisfying the technical constraints.
Considering the profit maximization of the EV- parking lot, the authors in [71] proposed an optimization model and determined the optimal allocation of solar-based DG, and ESS units also, the optimal charging price of the PEV. The objective is to maximize the annual profit of the parking lot owner by selling electricity to the PEVs which is given in Equation (3):
The annual capital costs of distributed storage (DS) unit, solar-based DG unit, and purchasing electrify cost from the grid is subtracted from the annual revenue generated by selling electricity to PEVs and solar-based DG energy unit selling to the network.
The authors mentioned the benefits of the integration of renewable-based DG, DS in the parking lot and sell the energy to the grid but the power companies do not give much profit to the parking lot owner. On the other hand, selling the power to a building can maximize the benefit more.
The authors in [72] proposed an optimal allocation and sizing for a fast-charging station and public parking lot by using the PSO and Voronoi diagram to minimize the annual cost of the whole PEV charging station. The proposed framework is verified by testing it on a real urban area in China. The objective of the integrated framework is to minimize the annual social cost which is as follows Equation (4):
where is the investment cost such as charging facility, grid reinforcement, and land cost, is the waiting cost, and is the annual operation and maintenance cost of a charging station. Different charging facilities have different voltage levels, and correspondingly the price is different. Thus, represents the electricity cost, where and is the constituting electricity cost at home, public charging station, and fast charging station, respectively. However, the proposed scheme is limited to private vehicle charging and did not consider the public fleet such as taxies and buses.
To keep the operational cost of a fast-charging station low, the authors in [37] proposed an approach by using ESS in a rapid charging station to reduce the negative impact on the power grid during peak hours. The proposed design is treated as a mixed-integer linear programming problem, and the output is the optimal capacity of BESS (. The BESS is used to store energy from the network during low peak hours and return stored energy to EVs. The objective function of the proposed approach is to determine the optimal size of BESS for a fast-charging station to minimize the station energy cost (SEC) and storage cost.
Using the V2G facility, the authors in [69] proposed a SA approach for intelligent energy resource management from the aggregator point of view and compared the simulation results with General Algebraic Modelling System (GAMS) and GAMS_N. The problem is characterized as MILP, and the objective is to minimize the aggregator operation cost. The proposed method is validated on IEEE-33 bus test system with 66 distributed generators units (33 PV, 8 fuel cells, 4 wind farms, 2 small hydro stations, 1 waste to energy, 3 biomass units, and 15 cogeneration units), 32 loads, and 1000 Grid-able vehicles. The proposed SA method provides the solution in less than 1 s, while the other approaches take more than 5 h. However, the total cost of network simulation is 3% higher than GAMS and GAMS_N.
In [73], the authors used the storage capability of EVs to reduce the intermittency of wind power generation and grid operation costs. The grid operation cost is minimized by the hourly coordination of EV operation and wind power generation by using the proposed stochastic security constraints unit commitment model (SCUC). Due to the grid complexity and mobility of V2G treated mixed integer programming (MIP). The proposed approach is tested on the IEEE-6 bus and modified IEEE-118 bus test system. However, the authors only used the vehicle storage capability and not the BESS as a storage device. Further, frequent charging/discharging reduces the lifespan of the vehicle battery.
With EVs becoming more popular and EV charging from standard outlets at homes or car parks becoming more common, the uncoordinated charging by these extra electrical loads will cause additional power loss and voltage deviation in the distribution system. Hence, the coordinated charging is proposed to minimize the power loss and maximize the load factor [74,75]. The optimal charging profile is obtained with the quadratic programming technique and analysis on the IEEE-34-node test system. However, this approach can prolong grid balancing and voltage control by the PHEV reactive power control. The proposed method is limited to loss minimization and load factor maximization.
The authors in [76,77] proposed a three-level Energy Management System (EMS), consisting of primary, secondary, and tertiary levels to minimize the economic cost related to energy exchange between gird and micro-grid. The tertiary level minimizes the economic cost of microgrid operation as load, weather, and vehicle mobility profile forecasts for the next day, whenever the vehicle plug-in the EMS runs in every 3 h. The secondary level minimizes the forecast deviation between the real and forecast value for the next 15 min. The EMS runs every half an hour. The primary level runs every 3 s to ensure the balance between the demand and generation against any unexpected load or fault.
By introducing these three management levels, critical, adjustable, and shiftable loads can be managed efficiently, and profits can be increased when the shiftable loads are assigned to off-peak hours which saves the economic cost related to energy exchange between grid and micro-grid. However, the introduction of BESS in the proposed EMS can generate more profit and can efficiently manage them as critical, adjustable, shiftable load.
As mentioned above regarding the intermittency of the PV, wind power generation is one of the most significant challenges in the adoption of the RESs. Therefore, the authors in [78,79] proposed a novel optimization scheme to coordinate the charging/discharging of EV batteries to deal with the intermittency in the RESs for minimizing the power imbalance in the grid. The authors used the energy resources such as WT, PV, and generator and used the standard linear programming method with root-mean-square objective function and linear constraints. The optimization is repeatedly computed to revise the V2G/G2V facilities to deal with the error in the prediction and can compute the problem quickly and efficiently by standard optimization software. However, the continuous charging/discharging of EV degrades the vehicle battery lifespan. This power imbalance issue can be resolved more efficiently by bringing the storage system into the microgrid. Further, the diesel generator is used to provide the ancillary service which causes the CO2 emission.
6. Discussion
6.1. Energy Source
The state-of-the-art parking lot consists of different energy resources and ESS to meet the power demand due to the increasing number of EVs in the mark and to support renewable energy generation. Energy sources used in the state-of-the-art parking lot are as follow:
- Grid.
- WT/PV.
- Diesel Generator.
- Hydro.
- Thermal.
- EV Fleet (for V2G purpose).
- ESS.
6.2. Optimization Method and Objectives
The advanced optimization methods use for the energy resource allocation are as follow:
- Mixed-integer linear programming.
- Mixed-integer programming.
- Second-order conic programming (Convex Optimization).
- Markov chain Monte Carlo simulation.
- Particle swarm optimization and Voronoi diagram.
- Simulated annealing approach.
- Quadratic programming.
- Standard linear programming with the root-mean-square objective function.
The above optimization methods are used in the state-of-the-art research to: (i) enhance the reliability of the electrical grid using the available energy in the parking lot; (ii) maximize EV penetration; (iii) minimize total system loss; (iv) maximize parking lot owner profit; (v) minimize distribution system operator costs; (vi) minimize the station energy cost and ESS storage cost; and (vii) minimize the distribution power loss.
6.3. Services and Test System
To improve the grid reliability and to encourage EV owners by providing the following services are provided to EV and Parking lot owners:
- Vehicle to Grid.
- Grid to Vehicle.
- Parking lot to grid.
- Parking lot to Vehicle.
The above services are tested on: (i) IEEE-34-node test system; (ii) IEEE-33 bus test system with 66 generators, 32 loads, and 1000 grid-able vehicles; (iii) IEEE-6-Bus power system; (iv) Modified IEEE-118-bus system; and (v) Alibeykoy feeders Hamikoy feeders (Istanbul, Turkey).
The details of the objective function, services, optimization method, types of energy resources, test system, and the contribution of the article on parking lot owner’s profit maximization are summarized in Table 3. It is important to notice that the EV penetration in the market varies from county to county, even province to province, due to national and council zero-emission target and EV adoption policies. It is also depending on the: (i) availability of charging stations; (ii) renewable energy share; (iii) subsidies on EV; and (iv) income (as EVs are more expensive than ICE vehicles).
Table 3.
Summary of reviews on EV charging/discharging optimization methods.
6.4. Future Research Recommendations
Based on the literature survey conducted in this paper, some future research directions are recommended as follows:
- The research on the application of BESS and bi-directional power transfer capability of EVs in a distribution system can reduce the global warming issue more resourcefully by providing green electricity to homes and offices. Also, the intermittency of PV can be reduced by integrating optimally sized BESS [80]. Also, the profit of the parking lot owner can be maximized by incorporating battery swap to provide added value to customers.
- The frequent charging/discharging can cause EV battery life degradation [81]. Therefore, the use of BESS as an energy storage backup and subsequent sale of electricity to the building instead of discharging the EV battery repeatedly will ultimately increase the battery lifespan.
- The proposed PEB charge scheduling algorithms [46] can be applied to the charging scheduling of private EVs and Electric Ferries where the arrival and departure schedules are known. The battery capacity optimization for a given route can also be evaluated to minimize the vehicle cost.
- Research should be carried out on coordinated charging because uncoordinated charging of EVs can cause a peak load on a distribution system. EVs could be a great solution to settle these complications. In general, most vehicles are parked during peak load time. Therefore, using the stored electricity from vehicle (battery) to grid (V2G), electrical peak load would be reduced.
- Conventional PSO algorithm use for the optimal sizing has some problems such as searching the optimal value, the particles are trapped into local minima, and the number of iterations taken is increased [82,83]; therefore, the research could be carried out on the local trapping issue’s solution and computational time enhancement for example by hybridizing it with other heuristic technique can resolve these problems.
- The existing literature considered eco-charging systems (consisting of PV, ESS, and the electrical grid). However, mixing the other renewable DGs such as wind energy and Biomass energy can make the ecosystem more robust and sustainable and can conquer the intermittency issue caused by PV and wind.
- Research could be carried out on the charging and discharging model with the regenerative braking system of PEBs, which can lead to a more precise SOC estimation of PEBs.
- The existing literature considered the energy trading among the entities (PV, ESS, building, grid, and PEBs) in the ecosystem. However, generating power in multiple depots by using renewable energy resources and performing the energy trading between them can reduce the overloading of the grid.
- Performing the energy trading between Vehicle-to-Vehicle (V2V) and Vehicle-to-Grid (V2G) can avoid the peak load [84,85] on the grid and encourage the participation of the depot owner in the energy reserve market.
The investigation of the risk of charging PEBs on the distribution grid, such as over-current and under-voltage, power losses, and the stress on the distribution transformer can be done.
7. Conclusions and Recommendation
This paper provided a thorough trendy review of the EV technologies, including EV charging methods such as BSS, WPT, and CC, EV charging standards, and optimization techniques for the design of optimal EV charging strategies. The paper discussed the limitations of the existing technologies. In addition, the paper identified some of the research suggestions that needed to be addressed. However, the paper did not investigate in terms of the manufacturing aspects since its focus was mainly on the standard and technologies.
Author Contributions
Conceptualization, writing—original draft preparation, S.M.A.; writing—review and editing, supervision, investigation, and visualization, T.T.L. and B.C.S.; writing—review, S.A. and K.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Giannakis, E.; Serghides, D.; Dimitriou, S.; Zittis, G. Land transport CO2 emissions and climate change: Evidence from Cyprus. Int. J. Sustain. Energy 2020, 39, 634–647. [Google Scholar] [CrossRef]
- Fu, Y.; Hu, C.; Yang, D. Conservative or Aggressive?—The dynamic adjustment of Fit-in Tariff policy for PV power generation in China. Front. Energy Res. 2021, 9, 141. [Google Scholar] [CrossRef]
- Dong, Y.; Coleman, M.; Miller, S.A. Greenhouse Gas Emissions from Air Conditioning and Refrigeration Service Expansion in Developing Countries. Annu. Rev. Environ. Resour. 2021, 46, 1–25. [Google Scholar] [CrossRef]
- Wörner, R.; Morozova, I.; Cao, D.; Schneider, D.; Neuburger, M.; Mayer, D.; Körner, C.; Kagerbauer, M.; Kostorz, N.; Blesl, M.; et al. Analysis and Prediction of Electromobility and Energy Supply by the Example of Stuttgart. World Electr. Veh. J. 2021, 12, 78. [Google Scholar] [CrossRef]
- Herrington, R. Mining our green future. Nat. Rev. Mater. 2021, 6, 456–458. [Google Scholar] [CrossRef]
- Nykvist, B.; Olsson, O. The feasibility of heavy battery electric trucks. Joule 2021, 5, 901–913. [Google Scholar] [CrossRef]
- Lander, L.; Kallitsis, E.; Hales, A.; Edge, J.S.; Korre, A.; Offer, G. Cost and carbon footprint reduction of electric vehicle lithium-ion batteries through efficient thermal management. Appl. Energy 2021, 289, 116737. [Google Scholar] [CrossRef]
- Gold, R. Status Report on Electrification Policy: Where to Next? Curr. Sustain./Renew. Energy Rep. 2021, 8, 114–122. [Google Scholar] [CrossRef]
- Fried, T.; Welle, B.; Avelleda, S. Steering a Green, Healthy, and Inclusive Recovery through Transport; World Resources Institute: Washington, DC, USA, 2021. [Google Scholar]
- Australian Energy Market Commission: 2020 Retail Energy Competation. Available online: https://www.aemc.gov.au/sites/default/files/documents/2020_retail_energy_competition_review_-_final_report.pdf (accessed on 23 July 2021).
- Molyneaux, L. Queensland Energy Storage Manufacturing Plan 2020; Centre for Policy Futures, The University of Queensland: Brisbane, Australia, 2021. [Google Scholar]
- Nasab, N.M.; Kilby, J.; Bakhtiaryfard, L. Case Study of a Hybrid Wind and Tidal Turbines System with a Microgrid for Power Supply to a Remote Off-Grid Community in New Zealand. Energies 2021, 14, 3636. [Google Scholar]
- Natalini, D.; Bravo, G.; Newman, E. Fuel riots: Definition, evidence and policy implications for a new type of energy-related conflict. Energy Policy 2020, 147, 111885. [Google Scholar] [CrossRef]
- Erickson, L.E.; Brase, G. Electrification of Transportation. In Reducing Greenhouse Gas Emissions and Improving Air Quality; CRC Press: Boca Raton, FL, USA, 2019; pp. 39–50. [Google Scholar]
- Li, Z.; Khajepour, A.; Song, J. A comprehensive review of the key technologies for pure electric vehicles. Energy 2019, 182, 824–839. [Google Scholar] [CrossRef]
- Bozhkov, S. Structure of the Model of Hybrid Electric Vehicle Energy Efficiency. Trans. Motauto World 2021, 6, 76–79. [Google Scholar]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the Art and Trends in Electric and Hybrid Electric Vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Mohith, K.; Patilkulkarni, S.; Kollaparti, N. Comparative Analysis of Different Control Techniques for Six-Phase PMSM as an Application to HEV. In Smart Sensors Measurements and Instrumentation; Springer: Berlin/Heidelberg, Germany, 2021; pp. 93–108. [Google Scholar]
- Van Harselaar, W.; Hofman, T.; Brouwer, M. Automated dynamic modeling of arbitrary hybrid and electric drivetrain topologies. IEEE Trans. Veh. Technol. 2018, 67, 6921–6934. [Google Scholar] [CrossRef]
- Kabalan, B.; Vinot, E.; Yuan, C.; Trigui, R.; Dumand, C.; El Hajji, T. Efficiency Improvement of a Series–Parallel Hybrid Electric Powertrain by Topology Modification. IEEE Trans. Veh. Technol. 2019, 68, 11523–11531. [Google Scholar] [CrossRef]
- Miller, S. Hybrid-Electric Vehicle Model in Simulink. 2014. Available online: https://au.mathworks.com/matlabcentral/fileexchange/28441-hybrid-electric-vehicle-model-in-simulink (accessed on 28 July 2021).
- Khodaparastan, M.; Mohamed, A.A.; Brandauer, W. Recuperation of regenerative braking energy in electric rail transit systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2831–2847. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2019, 57, 95–108. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, J.; Qin, D.; Zhang, Y.; Lei, Z. Rule-corrected energy management strategy for hybrid electric vehicles based on operation-mode prediction. J. Clean. Prod. 2018, 188, 796–806. [Google Scholar] [CrossRef]
- Arif, S.M.; Lie, T.T.; Seet, B.C. A Novel Simulation Model for analyzing the State of Charge of Electric Vehicle. In Proceedings of the IEEE PES, Innovative Smart Grid Technologies Asia, Singapore, 22–25 May 2018; pp. 1–5. [Google Scholar]
- Das, H.S.; Tan, C.W.; Yatim, A. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, L.; Sun, X.; Li, L.; Lian, J. A Long-term Energy Management Strategy for Fuel Cell Electric Vehicles Using Reinforcement Learning. Fuel Cells 2020, 20, 753–761. [Google Scholar] [CrossRef]
- Bendjedia, B.; Rizoug, N.; Boukhnifer, M.; Bouchafaa, F.; Benbouzid, M. Influence of secondary source technologies and energy management strategies on Energy Storage System sizing for fuel cell electric vehicles. Int. J. Hydrogen Energy 2018, 43, 11614–11628. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, Z.A.; Alam, M.S.; Khateeb, S. A Review of the Electric Vehicle Charging Techniques, Standards, Progression and Evolution of EV Technologies in Germany. Smart Sci. 2017, 6, 36–53. [Google Scholar] [CrossRef]
- Gschwendtner, C.; Sinsel, S.R.; Stephan, A. Vehicle-to-X (V2X) implementation: An overview of predominate trial configurations and technical, social and regulatory challenges. Renew. Sustain. Energy Rev. 2021, 145, 110977. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Zaninelli, D.; Graditi, G.; Di Somma, M. The integration of electric vehicles in smart distribution grids with other distributed resources. In Distributed Energy Resources in Local Integrated Energy Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 315–345. [Google Scholar]
- Erdinç, O.; Taşcıkaraoǧlu, A.; Paterakis, N.G.; Dursun, I.; Sinim, M.C.; Catalão, J.P. Comprehensive optimization model for sizing and siting of DG units, EV charging stations, and energy storage systems. IEEE Trans. Smart Grid 2017, 9, 3871–3882. [Google Scholar] [CrossRef]
- Li, T.; Zhang, J.; Zhang, Y.; Jiang, L.; Li, B.; Yan, D.; Ma, C. An optimal design and analysis of a hybrid power charging station for electric vehicles considering uncertainties. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5147–5152. [Google Scholar]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Chowdhury, S.R. A Three-Phase Overlapping Winding Based Wireless Charging System for Transportation Applications; University of Akron: Akron, OH, USA, 2021. [Google Scholar]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Negarestani, S.; Fotuhi-Firuzabad, M.; Rastegar, M.; Rajabi-Ghahnavieh, A. Optimal sizing of storage system in a fast charging station for plug-in hybrid electric vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 443–453. [Google Scholar] [CrossRef]
- Yoldaş, Y.; Önen, A.; Muyeen, S.M.; Vasilakos, A.V.; Alan, İ. Enhancing smart grid with microgrids: Challenges and opportunities. Renew. Sustain. Energy Rev. 2017, 72, 205–214. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Impact of electric vehicle fast charging on power system voltage stability. Int. J. Electr. Power Energy Syst. 2014, 57, 241–249. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 3866–13890. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, W.; Niu, L.; Jiang, J. Coordinated charging strategy for electric taxis in temporal and spatial scale. Energies 2015, 8, 1256–1272. [Google Scholar] [CrossRef] [Green Version]
- Dai, Q.; Cai, T.; Duan, S.; Zhang, W.; Zhao, J. A smart energy management system for electric city bus battery swap station. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–4. [Google Scholar]
- Martínez-Lao, J.; Montoya, F.G.; Montoya, M.G.; Manzano-Agugliaro, F. Electric vehicles in Spain: An overview of charging systems. Renew. Sustain. Energy Rev. 2017, 77, 970–983. [Google Scholar] [CrossRef]
- Electric Bus Arrive on Time: Marketplace, Economic, Technology, Environmental and Policy Perspectives for Fully Electric Buses in the EU. November 2018. Available online: https://www.transportenvironment.org/sites/te/files/publications/Electric%20buses%20arrive%20on%20time.pdf (accessed on 28 July 2021).
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Arif, S.M.; Lie, T.T.; Seet, B.C.; Ahsan, S.M.; Khan, H.A. Plug-In Electric Bus Depot Charging with PV and ESS and Their Impact on LV Feeder. Energies 2020, 13, 2139. [Google Scholar] [CrossRef]
- Arif, S.M.; Lie, T.T.; Seet, B.C.; Ayyadi, S. A novel and cost-efficient energy management system for plug-in electric bus charging depot owners. Electr. Power Syst. Res. 2021, 199, 107413. [Google Scholar] [CrossRef]
- Meishner, F.; Satvat, B.; Sauer, D.U. Battery electric buses in european cities: Economic comparison of different technological concepts based on actual demonstrations. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Carrilero, I.; González, M.; Anseán, D.; Viera, J.C.; Chacón, J.; Pereirinha, P.G. Redesigning European Public Transport: Impact of New Battery Technologies in the Design of Electric Bus Fleets. Transp. Res. Procedia 2018, 33, 195–202. [Google Scholar] [CrossRef]
- Pearre, N.S.; Kempton, W.; Guensler, R.L.; Elango, V.V. Electric vehicles: How much range is required for a day’s driving? Transp. Res. Part C Emerg. Technol. 2011, 19, 1171–1184. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.-K.; Do, T.D.; Jung, J.-W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Lenka, R.K.; Panda, A.K.; Dash, A.R.; Venkataramana, N.N.; Tiwary, N. Reactive Power Compensation using Vehicle-to-Grid enabled Bidirectional Off-Board EV Battery Charger. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021; pp. 1–6. [Google Scholar]
- Foqha, T.; Omar, M.A. Electric Vehicle Charging Infrastructures, Chargers Levels and Configurations; Academia: 2021; pp. 1–14. Available online: https://www.academia.edu/46518775/Electric_Vehicle_charging_infrastructures_chargers_levels_and_configurations (accessed on 1 August 2021).
- Xue, F.; Gwee, E. Electric vehicle development in singapore and technical considerations for charging infrastructure. Energy Procedia 2017, 143, 3–14. [Google Scholar] [CrossRef]
- Mangunkusumo, K.G.H.; Munir, B.S.; Hartono, J.; Kusuma, A.A.; Jintaka, D.R.; Ridwan, M. Impact of Plug In Electric Vehicle on Uniformly Distributed System Model. In Proceedings of the 2019 International Conference on Technologies and Policies in Electric Power & Energy, Yogyakarta, Indonesia, 21–22 October 2019; pp. 1–5. [Google Scholar]
- Das, H.; Rahman, M.; Li, S.; Tan, C. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Ayyadi, S.; Bilil, H.; Maaroufi, M. Optimal charging of Electric Vehicles in residential area. Sustain. Energy Grids Netw. 2019, 19, 100240. [Google Scholar] [CrossRef]
- Fernandez, L.P.; Roman, T.G.S.; Cossent, R.; Domingo, C.M.; Frias, P. Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Farzin, H.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M. Reliability studies of modern distribution systems integrated with renewable generation and parking lots. IEEE Trans. Sustain. Energy 2017, 8, 431–440. [Google Scholar] [CrossRef]
- Wang, S.; Bi, S.; Zhang, Y.J.; Huang, J. Electrical Vehicle Charging Station Profit Maximization: Admission, Pricing, and Online Scheduling. IEEE Trans. Sustain. Energy 2018, 9, 1722–1731. [Google Scholar] [CrossRef] [Green Version]
- Ayyadi, S.; Maaroufi, M. Diffusion models for predicting electric vehicles market in Morocco. In Proceedings of the 2018 International Conference and Exposition on Electrical And Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 46–51. [Google Scholar]
- Ayyadi, S.; Maaroufi, M. Optimal framework to maximize the workplace charging station owner profit while compensating electric vehicles users. Math. Probl. Eng. 2020, 2020, 7086032. [Google Scholar] [CrossRef]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Rosen, M.A. Intelligent optimization to integrate a plug-in hybrid electric vehicle smart parking lot with renewable energy resources and enhance grid characteristics. Energy Convers. Manag. 2014, 77, 250–261. [Google Scholar] [CrossRef]
- Su, C.-L.; Leou, R.-C.; Yang, J.-C. Optimal Electric Vehicle Charging Stations Placement in Distribution Systems. In Proceedings of the IEEE IECON 2013, Vienna, Austria, 10–13 November 2013; pp. 2121–2126. [Google Scholar]
- Yan, X.; Duan, C.; Chen, X.; Duan, Z. Planning of Electric Vehicle Charging Station Based on Hierarchic Genetic Algorithm. In Proceedings of the ITEC Asia-Pacific, Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- He, J.; Zhou, B.; Feng, C.; Jiao, H.; Liu, J. Electric Vehicle Charging Station Planning Based on Multiple-Population Hybrid Genetic Algorithm. In Proceedings of the 2012 International Conference on Control Engineering and Communication Technology, Shenyang, China, 7–9 December 2012; pp. 403–406. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Huang, B.; Xu, Y. Optimization of Series Hybrid Electric Vehicle Operational Parameters By Simulated Annealing Algorithm. In Proceedings of the IEEE International Conference Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 1536–1541. [Google Scholar]
- Sousa, T.; Morais, H.; Vale, Z.; Faria, P.; Soares, J. Intelligent Energy Resource Management Considering Vehicle-to-Grid: A Simulated Annealing Approach. IEEE Trans. Smart Grid 2012, 3, 535–542. [Google Scholar] [CrossRef]
- Shafie-Khah, M.; Siano, P.; Fitiwi, D.Z.; Mahmoudi, N.; Catalao, J.P.S. An Innovative Two-Level Model for Electric Vehicle Parking Lots in Distribution Systems With Renewable Energy. IEEE Trans. Smart Grid 2018, 9, 1506–1520. [Google Scholar] [CrossRef]
- Awad, A.S.; Shaaban, M.F.; El-Fouly, T.H.; El-Saadany, E.F.; Salama, M.M. Optimal Resource Allocation and Charging Prices for Benefit Maximization in Smart PEV-Parking Lots. IEEE Trans. Sustain. Energy 2017, 8, 906–915. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Z.; Xu, Z.; Song, Y. An integrated planning framework for different types of PEV charging facilities in urban area. IEEE Trans. Smart Grid 2016, 7, 2273–2284. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Wu, L.; Shahidehpour, M. Hourly Coordination of Electric Vehicle Operation and Volatile Wind Power Generation in SCUC. IEEE Trans. Smart Grid 2012, 3, 1271–1279. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Shao, Z.; Jian, L. The peak load shaving assessment of developing a user-oriented vehicle-to-grid scheme with multiple operation modes: The case study of Shenzhen, China. Sustain. Cities Soc. 2021, 67, 102744. [Google Scholar] [CrossRef]
- Igualada, L.; Corchero, C.; Cruz-Zambrano, M.; Heredia, F.J. Optimal Energy Management for a Residential Microgrid Including a Vehicle-to-Grid System. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar] [CrossRef] [Green Version]
- Ahsan, S.M.; Khan, H.A.; Hassan, N.-u.; Arif, S.M.; Lie, T.-T. Optimized power dispatch for solar photovoltaic-storage system with multiple buildings in bilateral contracts. Appl. Energy 2020, 273, 115253. [Google Scholar] [CrossRef]
- Nguyen, H.N.; Zhang, C.; Mahmud, M.A. Optimal coordination of G2V and V2G to support power grids with high penetration of renewable energy. IEEE Trans. Transp. Electrif. 2015, 1, 188–195. [Google Scholar] [CrossRef]
- Nimalsiri, N.I.; Ratnam, E.L.; Mediwaththe, C.P.; Smith, D.B.; Halgamuge, S.K. Coordinated charging and discharging control of electric vehicles to manage supply voltages in distribution networks: Assessing the customer benefit. Appl. Energy 2021, 291, 116857. [Google Scholar] [CrossRef]
- Teng, J.-H.; Luan, S.-W.; Lee, D.-J.; Huang, Y.-Q. Optimal Charging/Discharging Scheduling of Battery Storage Systems for Distribution Systems Interconnected With Sizeable PV Generation Systems. IEEE Trans. Power Syst. 2013, 28, 1425–1433. [Google Scholar] [CrossRef]
- Xu, M.; Wu, T.; Tan, Z. Electric vehicle fleet size for carsharing services considering on-demand charging strategy and battery degradation. Transp. Res. Part C Emerg. Technol. 2021, 127, 103146. [Google Scholar] [CrossRef]
- Arif, S.M.; Hussain, A.; Lie, T.T.; Ahsan, S.M.; Khan, H.A. Analytical Hybrid Particle Swarm Optimization Algorithm for Optimal Siting and Sizing of Distributed Generation in Smart Grid. J. Mod. Power Syst. Clean Energy 2020, 8, 1221–1230. [Google Scholar] [CrossRef]
- Pierro, M.; Perez, R.; Perez, M.; Prina, M.G.; Moser, D.; Cornaro, C. Italian protocol for massive solar integration: From solar imbalance regulation to firm 24/365 solar generation. Renew. Energy 2021, 169, 425–436. [Google Scholar] [CrossRef]
- Afonso, J.L. Battery charging station for electric vehicles based on bipolar dc power grid with grid-to-vehicle, vehicle-to-grid and vehicle-to-vehicle operation modes. In Proceedings of the Sustainable Energy for Smart Cities: Second EAI International Conference, SESC 2020, Viana do Castelo, Portugal, 4 December 2020; Volume 375, p. 187. [Google Scholar]
- Alsharif, A.; Wei, T.C.; Ayop, R.; Lau, K.Y.; Bukar, A.L. A Review of the Smart Grid Communication Technologies in Contactless Charging with Vehicle to Grid Integration Technology. J. Integr. Adv. Eng. (JIAE) 2021, 1, 11–20. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).