
Design of a High-Power High-Efficiency Multi-Receiver Wireless Power Transfer System

Abstract
1. Introduction
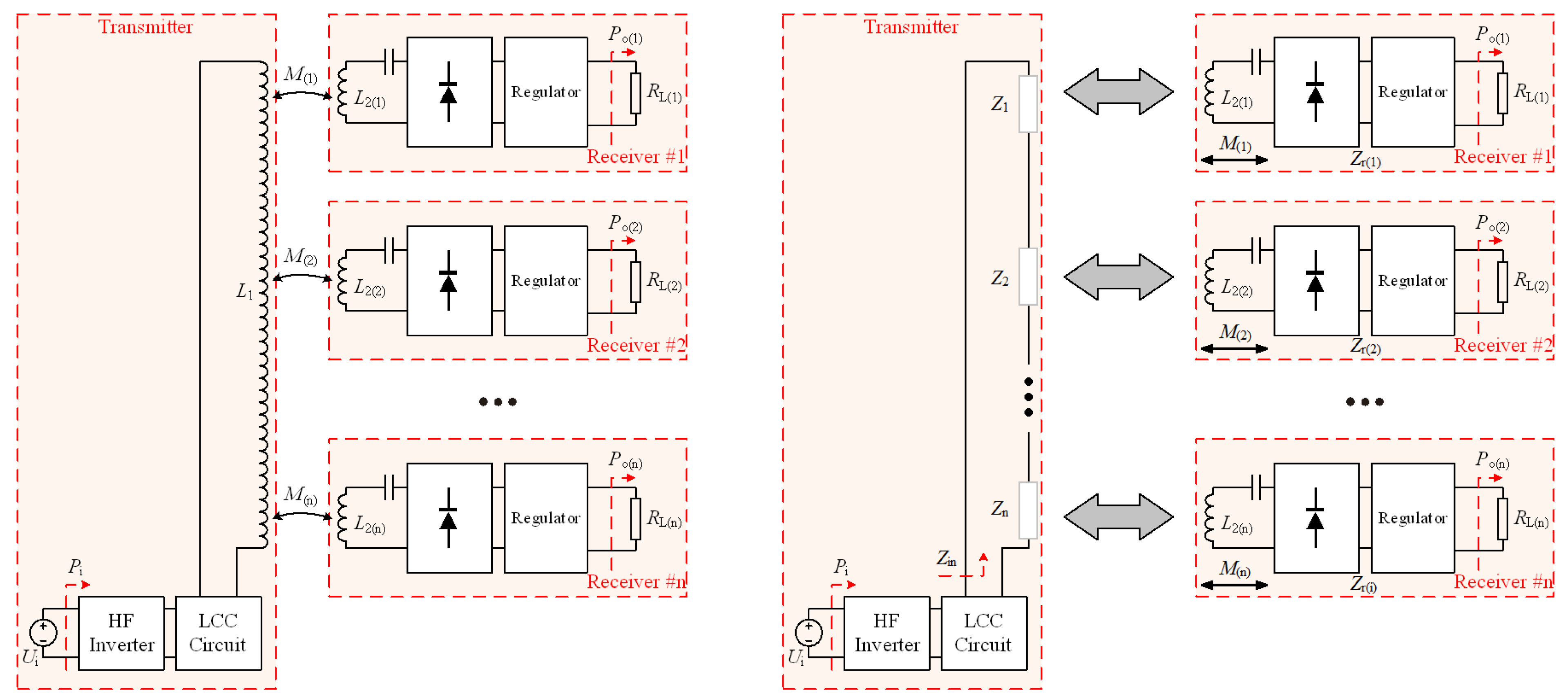
2. Multi-Receiver WPT Systems
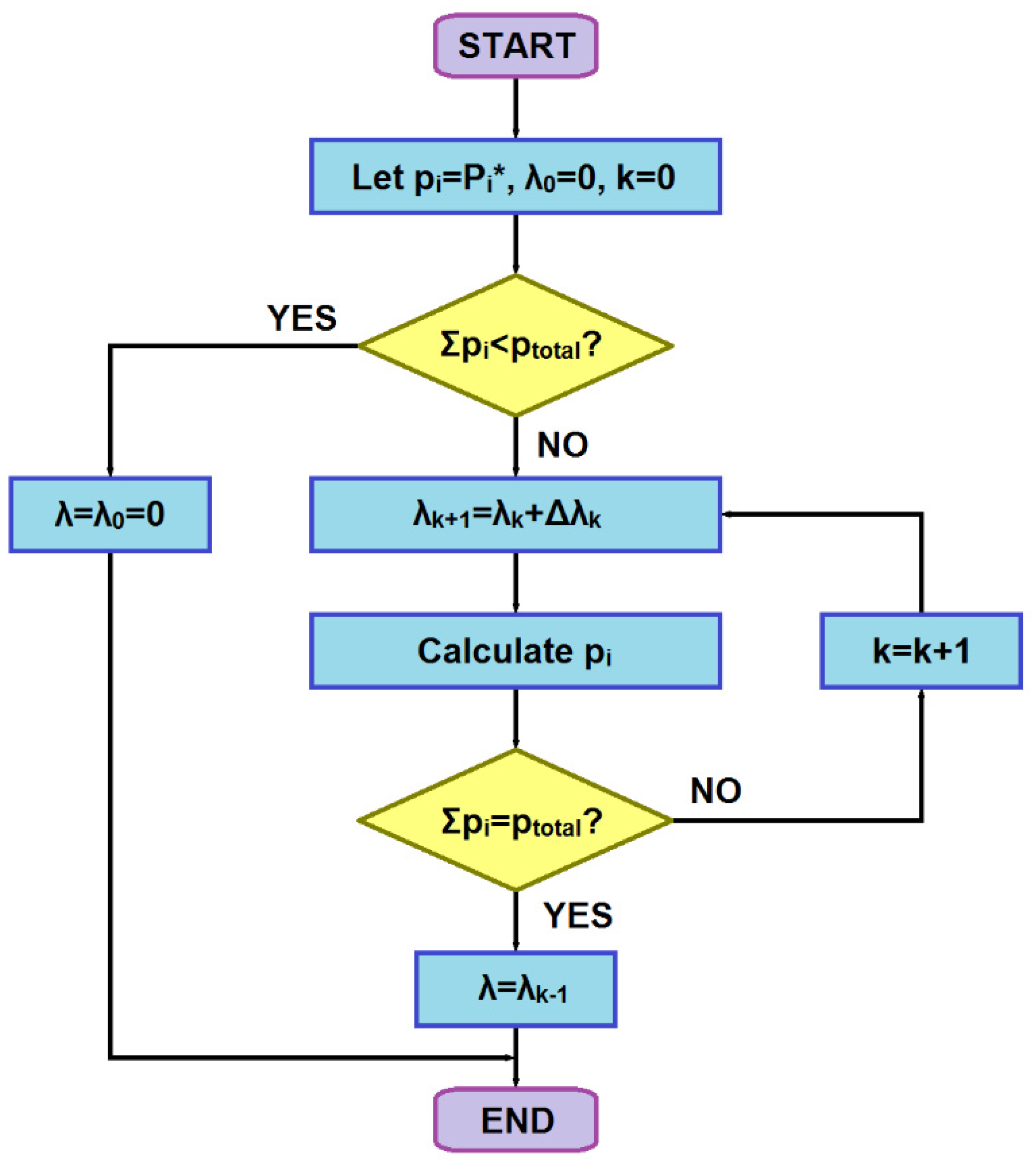
2.1. Competition Theory Analysis
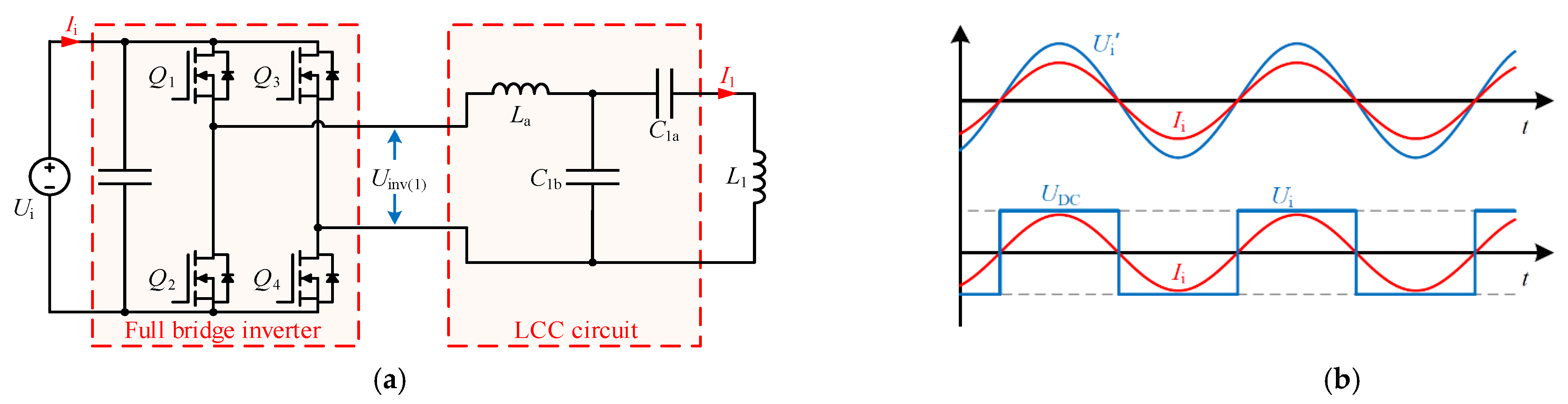
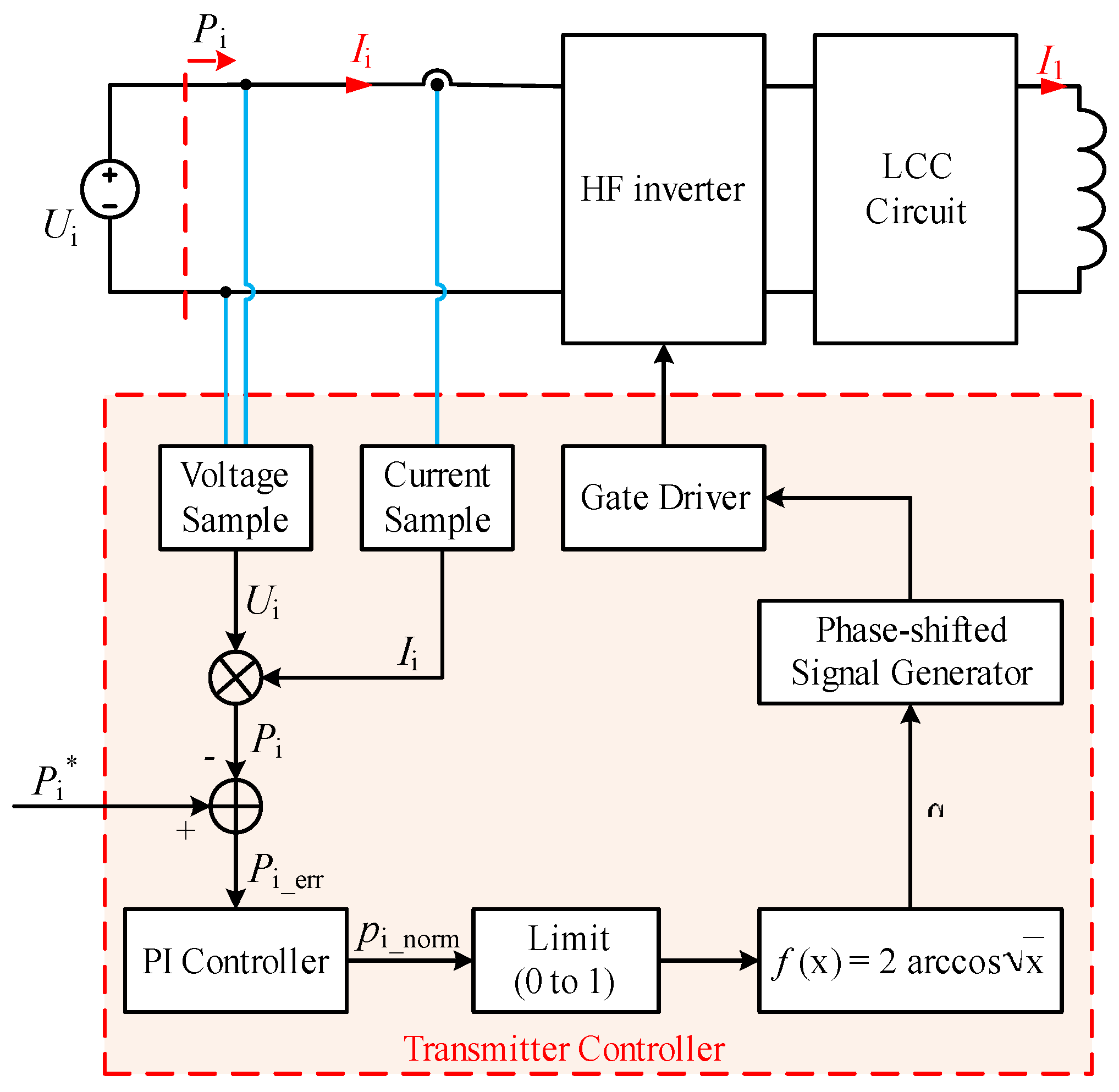
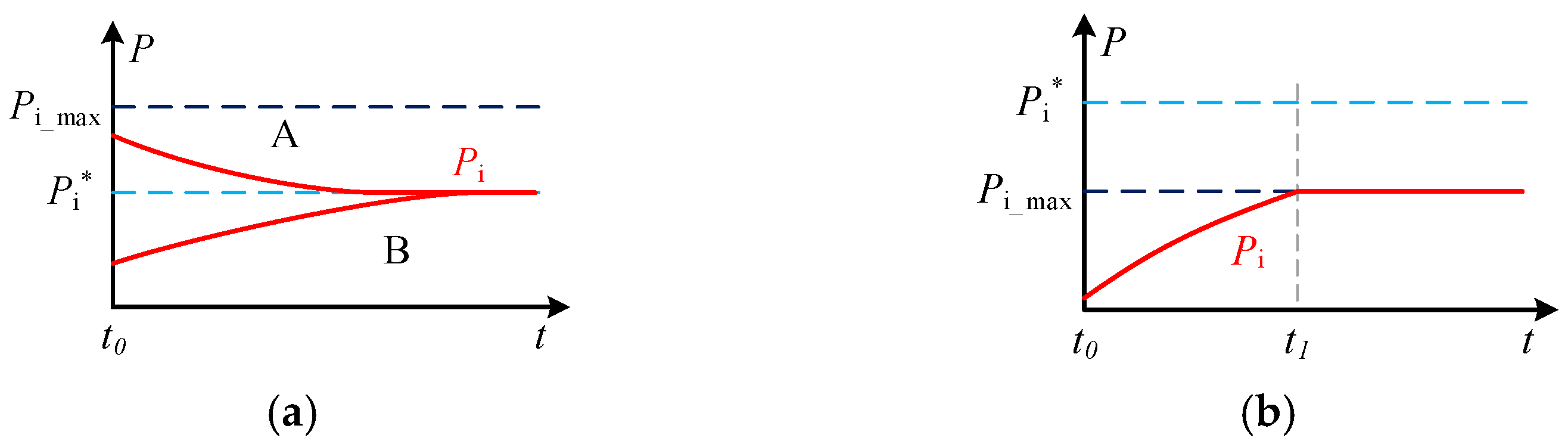
2.2. Transmitter Analysis
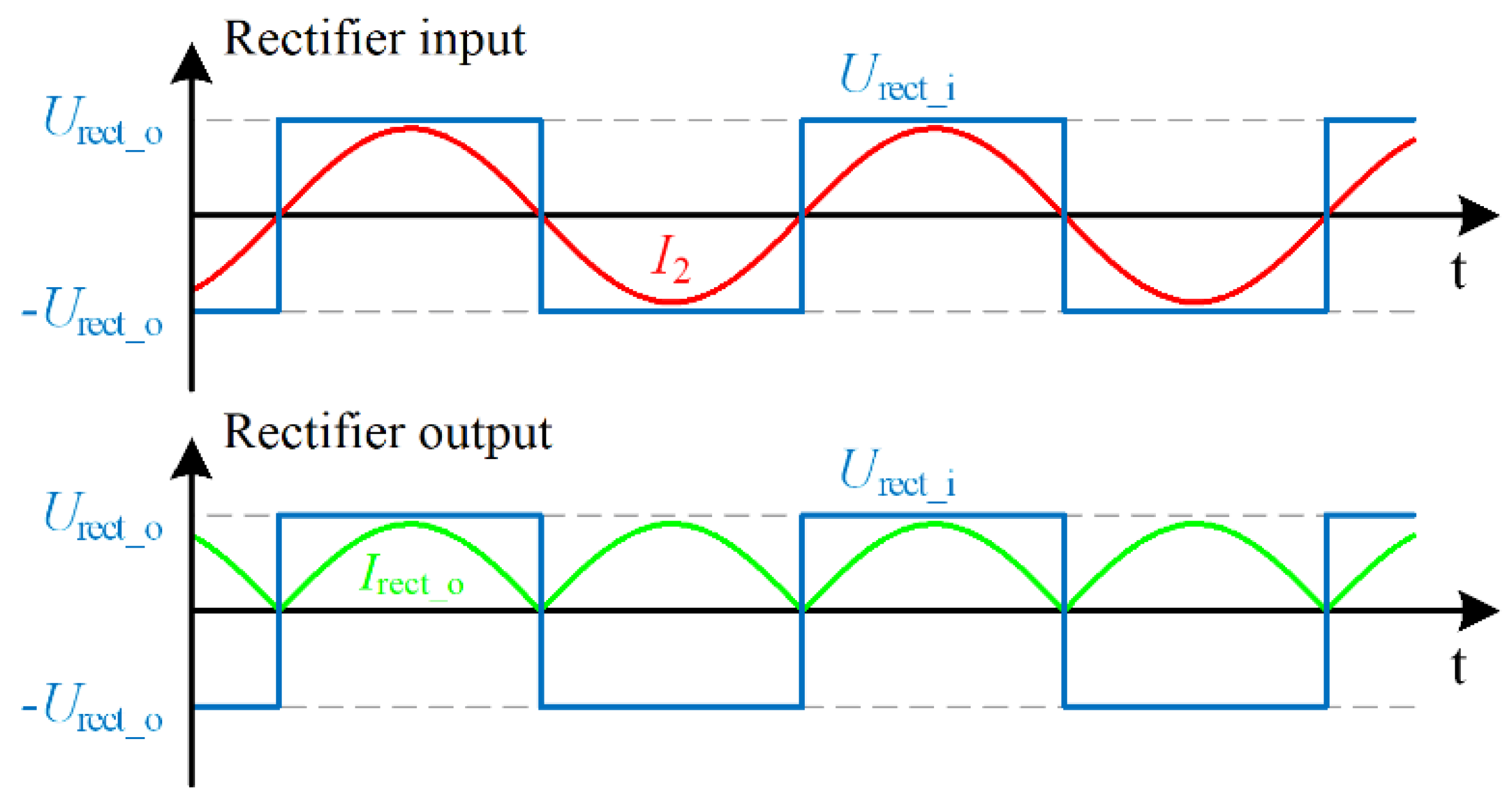
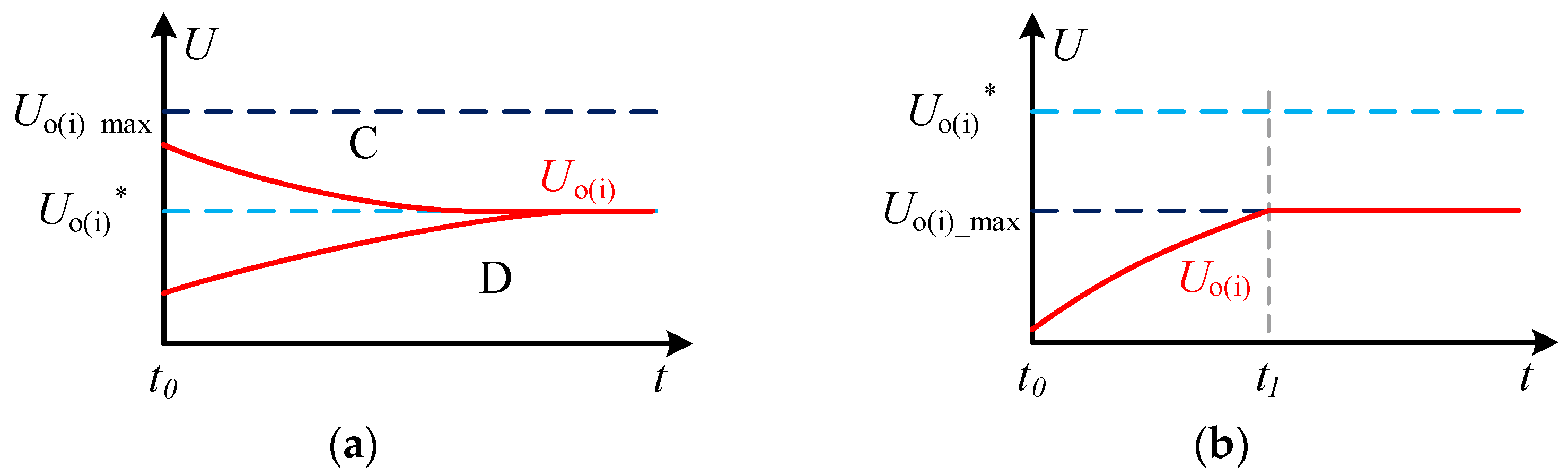
2.3. Receiver Analysis
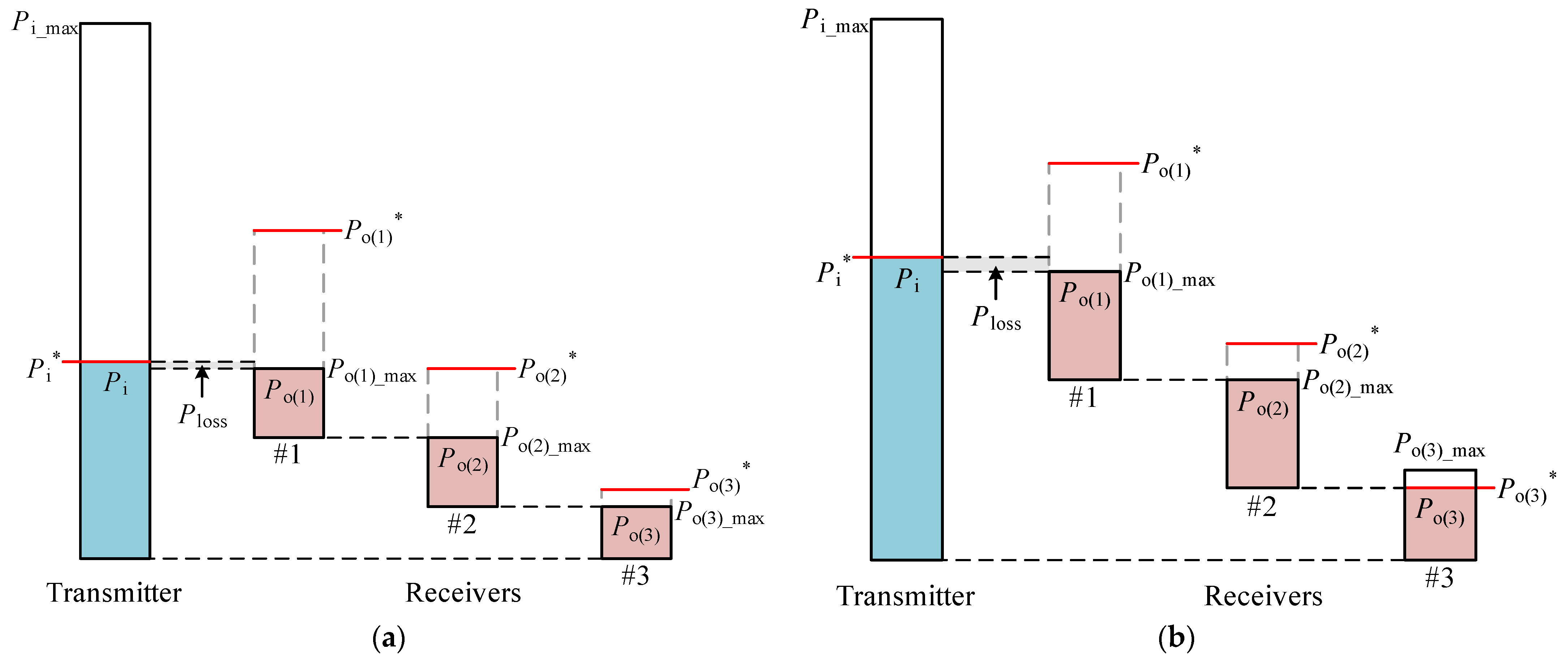
2.4. The Proposed Structure Analysis
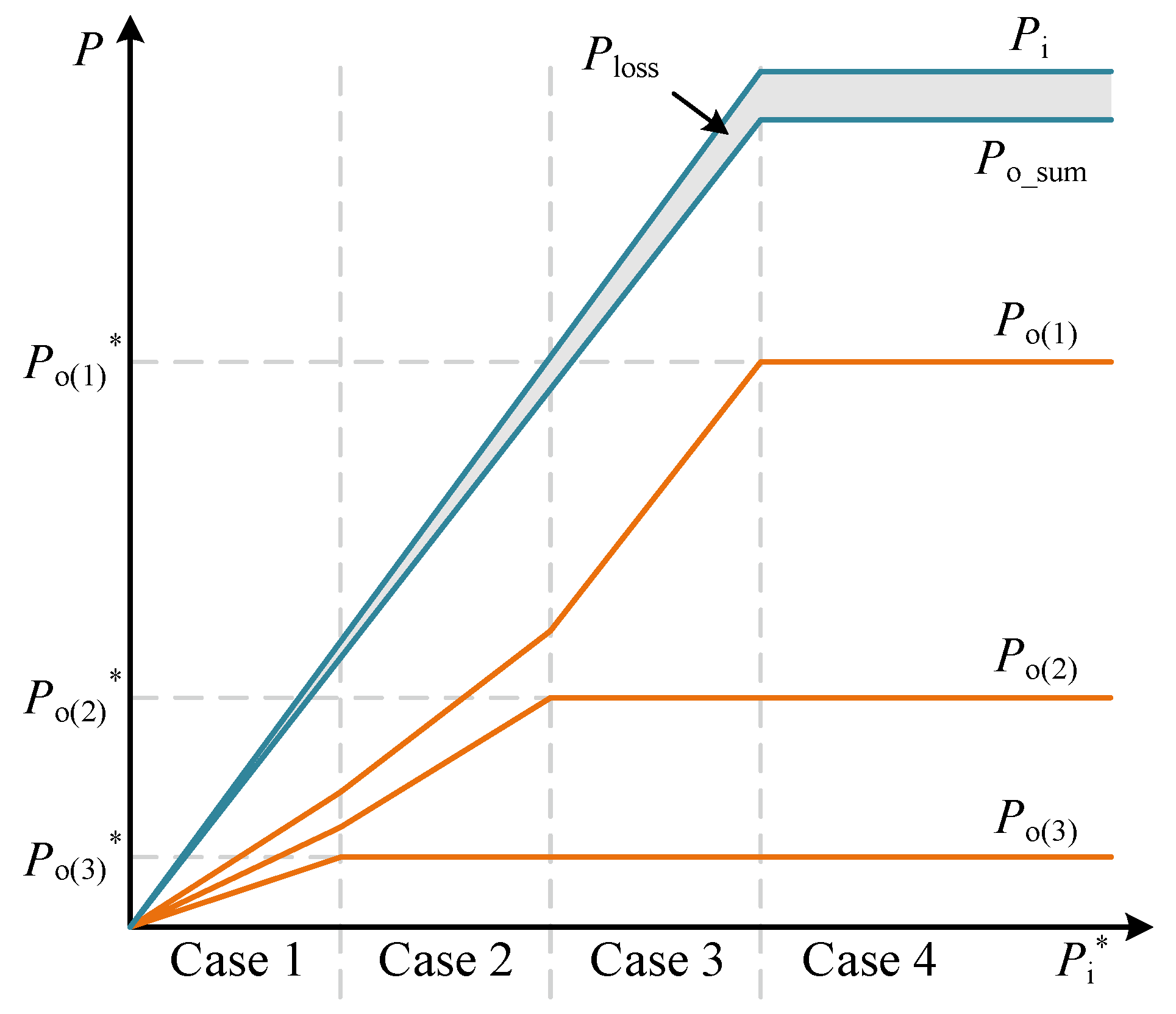
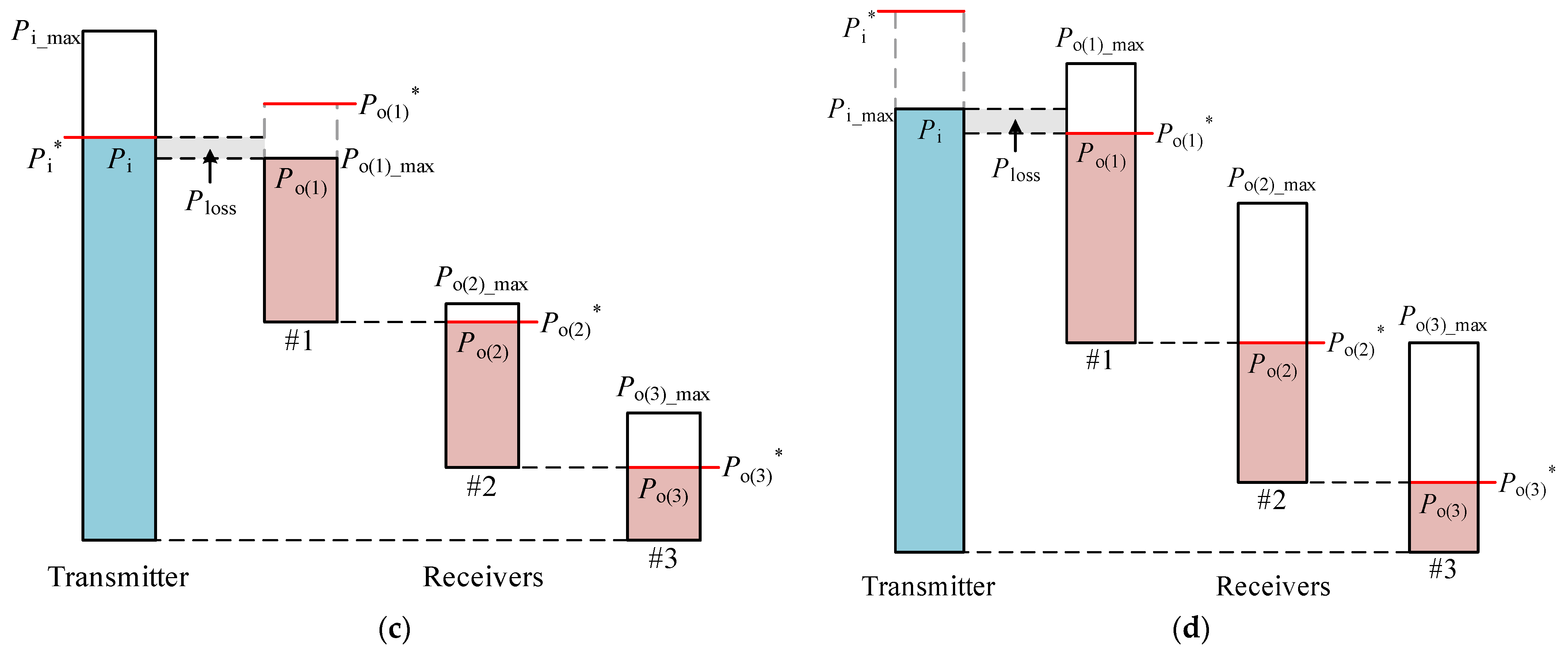
2.5. Four Typical Case Study in the Proposed Structure
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cannon, L.; Hoburg, J.F.; Stancil, D.D.; Goldstein, S.C. Magnetic Resonant Coupling As a Potential Means for Wireless Power Transfer to Multiple Small Receivers. IEEE Trans. Power Electron. 2009, 24, 1819–1825. [Google Scholar] [CrossRef]
- Kurs, A.; Moffatt, R.; Soljačić, M. Simultaneous mid-range power transfer to multiple devices. Appl. Phys. Lett. 2010, 96, 044102. [Google Scholar] [CrossRef]
- Ahn, D.; Hong, S. Effect of Coupling between Multiple Transmitters or Multiple Receivers on Wireless Power Transfer. IEEE Trans. Ind. Electron. 2013, 60, 2602–2613. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ma, C.; Zhu, X. Efficiency and Optimal Loads Analysis for Multiple-Receiver Wireless Power Transfer Systems. IEEE Trans. Microw. Theory Tech. 2015, 63, 801–812. [Google Scholar] [CrossRef]
- Hu, X.; Wang, Y.; Jiang, Y.; Lei, W.; Dong, X. Maximum Efficiency Tracking for Dynamic Wireless Power Transfer System Using LCC Compensation Topology. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 1992–1996. [Google Scholar]
- Liu, W.; Chau, K.T.; Lee, C.H.T.; Jiang, C.; Han, W.; Lam, W.H. Multi-Frequency Multi-Power One-to-Many Wireless Power Transfer System. IEEE Trans. Magn. 2019, 55, 1–9. [Google Scholar] [CrossRef]
- Zhou, J.; Gao, Y.; Huang, X.; Hu, S.; Fang, Y. Voltage transfer ratio analysis for multireceiver resonant power transfer systems. IET Power Electron. 2016, 9, 2795–2802. [Google Scholar] [CrossRef]
- Kuang, J.; Luo, B.; Zhang, Y.; Hu, Y.; Wu, Y. Load-Isolation Wireless Power Transfer With K-Inverter for Multiple-Receiver Applications. IEEE Access 2018, 6, 31996–32004. [Google Scholar] [CrossRef]
- Liu, W.; Chau, K.T.; Lee, C.H.T.; Jiang, C.; Han, W. A Switched-Capacitorless Energy-Encrypted Transmitter for Roadway-Charging Electric Vehicles. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar]
- Dai, Z.; Fang, Z.; Huang, H.; He, Y.; Wang, J. Selective Omnidirectional Magnetic Resonant Coupling Wireless Power Transfer with Multiple-Receiver System. IEEE Access 2018, 6, 19287–19294. [Google Scholar] [CrossRef]
- Huang, K.; Lau, V. Enabling Wireless Power Transfer in Cellular Networks: Architecture, Modeling and Deployment. IEEE Trans. Wirel. Commun. 2012, 13, 902–912. [Google Scholar] [CrossRef]
- Sun, T.; Xie, X.; Li, G.; Gu, Y.; Deng, Y.; Wang, Z. A Two-Hop Wireless Power Transfer System with an Efficiency-Enhanced Power Receiver for Motion-Free Capsule Endoscopy Inspection. IEEE Trans. Biomed. Eng. 2012, 59, 3247–3254. [Google Scholar] [PubMed]
- Hwang, S.-H.; Kang, C.G.; Lee, S.-M.; Lee, M.-Q. Reconfigurable Wireless Power Transfer System for Multiple Receivers. J. Electromagn. Eng. Sci. 2016, 16, 199–205. [Google Scholar] [CrossRef]
- Madawala, U.K.; Thrimawithana, D.J. A bidirectional inductive power interface for electric vehicles in V2G systems. IEEE Trans. Ind. Electron. 2011, 58, 4789–4796. [Google Scholar] [CrossRef]
- Koh, K.E.; Beh, T.C.; Imura, T.; Hori, Y. Impedance Matching and Power Division Using Impedance Inverter for Wireless Power Transfer via Magnetic Resonant Coupling. IEEE Trans. Ind. Appl. 2014, 50, 2061–2070. [Google Scholar] [CrossRef]
- Chen, L.J.; Boys, J.T.; Covic, G.A. Power Management for Multiple-Pickup IPT Systems in Materials Handling Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 163–176. [Google Scholar] [CrossRef]
- Zhang, Z.; Tong, R.; Liang, Z.; Liu, C.; Wang, J. Analysis and control of optimal power distribution for multi-objectivewireless charging systems. Energies 2018, 11, 1726. [Google Scholar] [CrossRef]
- Kim, Y.-J.; Ha, D.; Chappell, W.J.; Irazoqui, P.P. Selective Wireless Power Transfer for Smart Power Distribution in a Miniature-Sized Multiple-Receiver System. IEEE Trans. Ind. Electron. 2016, 63, 1853–1862. [Google Scholar] [CrossRef]
- Liu, F.; Yang, Y.; Ding, Z.; Chen, X.; Kennel, R.M. A Multifrequency Superposition Methodology to Achieve High Efficiency and Targeted Power Distribution for a Multiload MCR WPT System. IEEE Trans. Actions Power Electron. 2018, 33, 9005–9016. [Google Scholar] [CrossRef]
- Lee, K.; Cho, D.-H. Analysis of Wireless Power Transfer for Adjustable Power Distribution among Multiple Receivers. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 950–953. [Google Scholar] [CrossRef]
- Yin, H.; Fu, M.; Liu, M.; Song, J.; Ma, C. Autonomous Power Control in a Reconfigurable 6.78-MHz Multiple-Receiver Wireless Charging System. IEEE Trans. Ind. Electron. 2018, 65, 6177–6187. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Zhu, X.; Luk, P.; Ma, C. Compensation of cross coupling in multiple-receiver wireless power transfer systems. IEEE Trans. Ind. Inform. 2016, 12, 474–482. [Google Scholar] [CrossRef]
- Zhen, N.L.; Chinga, R.A.; Tseng, R.; Lin, J. Design and test of a high-power high-efficiency loosely coupled planar wireless power transfer system. IEEE Trans. Ind. Electron. 2009, 56, 1801–1812. [Google Scholar] [CrossRef]
- Shen, D.; Du, G.; Zeng, W.; Yang, Z.; Li, J. Research on Optimization of Compensation Topology Parameters for a Wireless Power Transmission System with Wide Coupling Coefficient Fluctuation. IEEE Access 2020, 8, 59648–59658. [Google Scholar] [CrossRef]
- Roberts, M.J. Signals and Systems: Analysis Using Transform Methods & MATLAB, 3rd ed.; McGraw-Hill Education: Boston, MA, USA, 2017. [Google Scholar]
- Erickson, R.W. Fundamentals of Power Electronics; Kluwer Academic Publishers: New York, NY, USA, 2010. [Google Scholar]
- Sedgewick, R.; Wayne, K. Algorithms, 4th ed.; Addison-Wesley Professional: Boston, MA, USA, 2011. [Google Scholar]
- Fernandez, M. Models of Computation: An Introduction to Computability Theory; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value | |
|---|---|---|---|
| f | Frequency | 85 kHz | |
| Ui | DC power supply voltage | 110 V | |
| Transmitter | L1 | Tx coil self-inductance | 91.53 μH |
| C1b | Tx compensation capacitor | 187.24 nF | |
| C1a | Tx compensation capacitor | 47.97 nF | |
| La | Tx compensation inductor | 18.85 μH | |
| Receiver #1 | L2(1) | Rx coil self-inductance | 42.89 μH |
| M(1) | Mutual inductance to Tx coil | 16.30 μH | |
| C2(1) | Compensation capacitor | 81.69 nF | |
| Receiver #2 | L2(2) | Rx coil self-inductance | 42.20 μH |
| M(2) | Mutual inductance to Tx coil | 14.51 μH | |
| C2(2) | Compensation capacitor | 85.15 nF | |
| Receiver #3 | L2(3) | Rx coil self-inductance | 52.14 μH |
| M(3) | Mutual inductance to Tx coil | 17.61 μH | |
| C2(3) | Compensation capacitor | 67.12 nF |
| Symbol | Value | |
|---|---|---|
| Load Resistance | RL(1) | 12 Ω |
| RL(2) | 14 Ω | |
| RL(3) | 20 Ω | |
| Instruction output voltage | * | 80 V |
| * | 70 V | |
| * | 60 V | |
| Equivalent instruction output power | * | 533.3 W |
| * | 350 W | |
| P(3)* | 120 W |
| Pi | Po(1) | Po(2) | Po(3) | ||
|---|---|---|---|---|---|
| Phase 1 | Theoretical | 768.6 W | 533.3 W | 0.0 W | 120.0 W |
| Measured | 768.5 W | 554.7 W | 0.0 W | 119.7 W | |
| Error | −0.01% | 4.01% | - | −0.25% | |
| Phase 2 | Theoretical | 800.0 W | 348.8 W | 236.2 W | 120.0 W |
| Measured | 805.7 W | 343.8 W | 223.2 W | 119.6 W | |
| Error | 0.71% | −1.43% | −5.50% | −0.33% |
| Method | Controller Algorithm | Main Circuit Configuration | Dynamic Distribution | Scalability | Additional Requirement |
|---|---|---|---|---|---|
| Impedance matching [4,15,20] | None | Simple | No | Low | - |
| Multi-frequency method [19] | None | Complicated | No | Low | Multiple inverters |
| Time-sharing method [18] | Simple | Complicated | Yes | Low | Capacitor switching array |
| Frequency communication method [16] | Simple | Simple | Yes | High | High accuracy frequency measurement |
| Game-theory-based control [21] | Complicated | Simple | Yes | High | - |
| Proposed method | Simple | Simple | Yes | High | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Zhang, H.; Wang, Z.; Cao, X.; Zhang, R. Design of a High-Power High-Efficiency Multi-Receiver Wireless Power Transfer System. Electronics 2021, 10, 1308. https://doi.org/10.3390/electronics10111308
Zhu Y, Zhang H, Wang Z, Cao X, Zhang R. Design of a High-Power High-Efficiency Multi-Receiver Wireless Power Transfer System. Electronics. 2021; 10(11):1308. https://doi.org/10.3390/electronics10111308
Chicago/Turabian StyleZhu, Yuyu, Hanyu Zhang, Zuming Wang, Xin Cao, and Renyin Zhang. 2021. "Design of a High-Power High-Efficiency Multi-Receiver Wireless Power Transfer System" Electronics 10, no. 11: 1308. https://doi.org/10.3390/electronics10111308
APA StyleZhu, Y., Zhang, H., Wang, Z., Cao, X., & Zhang, R. (2021). Design of a High-Power High-Efficiency Multi-Receiver Wireless Power Transfer System. Electronics, 10(11), 1308. https://doi.org/10.3390/electronics10111308