
Parameter Estimation of a Single-Phase Boost PFC Converter with EMI Filter Based on an Optimization Algorithm




Abstract
1. Introduction
2. The AC–DC Power Factor Correction Converter
3. The Proposed Parameter Estimation Methodology
3.1. Nonlinear Least Squares Optimization for Parameter Estimation
3.2. Proposed Parameter Identification Methodology
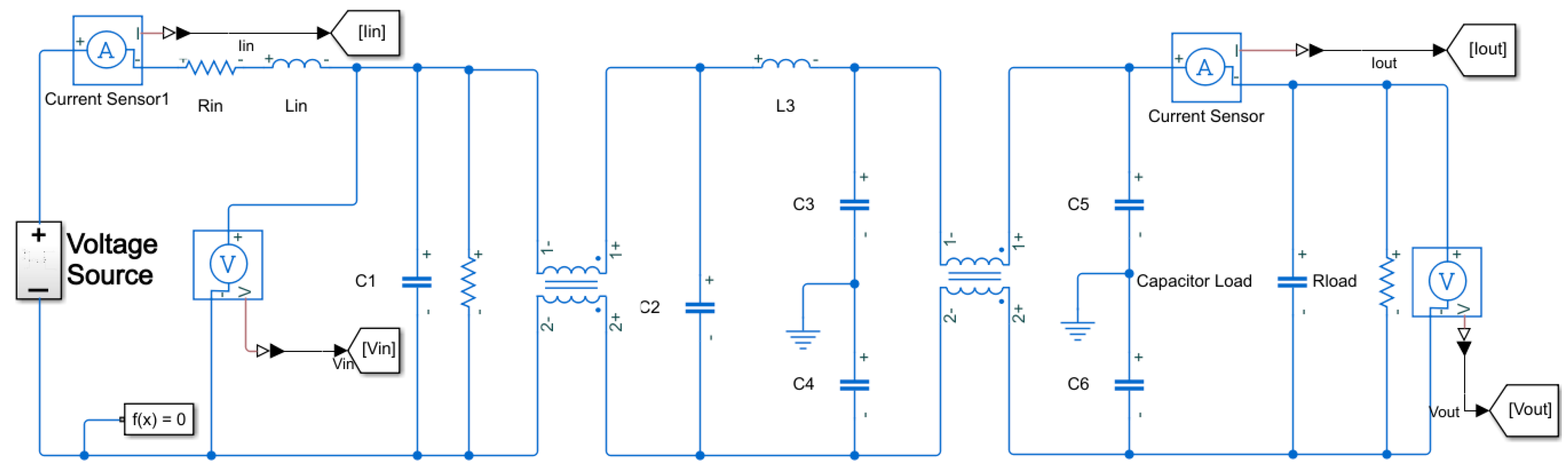
- EMI filter: This stage aims to identify the 12 values of the passive elements of the EMI filter. First, the experimental setup and the data to be acquired in the laboratory are defined. To force a sufficient rich response of the EMI filter that enables identifying the values of the parameters, a capacitor was connected at the output terminals in parallel with the resistive load while applying a periodic square waveform voltage to the input terminals. To perform the identification process, the voltage and current at the input and output terminals are needed. To simulate the high output impedance of the function generator used to generate the square waveform, a resistance Rin in series with an inductance Lin were added to the Simulink® model, and the values of such parameters were identified jointly with the parameters of the filter. To enhance the performance of the identification process, the data were divided into two sets, which were used in the optimization process, i.e., the data centered in the rising and in the falling edges of the periodic square waveform. This is done to focus on the intervals that contain the relevant information. Figure 6 shows the Simulink® model used to identify the parameters of the passive EMI filter.
- Rectifier: The identification process of the parameters of the single-phase rectifier is independent of the other elements of the boost PFC converter since it just uses the acquired signals at the input and output terminals of the rectifier. This process aims to estimate the diode and the output capacitor parameters. The complexity of this stage depends on the considered diode model, the exponential in this case, as described by (1).In order to obtain an accurate representation of the exponential model, the parameter estimation method uses the data acquired in three experiments of the rectifier, in which the load connected at the output terminals was changed. The NLS optimization algorithm identifies the values of the parameters by fitting the curves of three operating points of the rectifier. Figure 7 shows the corresponding Simulink model.
- Boost converter (open loop): The third stage of the proposed methodology is the estimation of the values of the boost converter electrical components. The available data are the currents and voltages at the input terminals of the EMI filter and at the output of the boost converter. Therefore, the previously estimated parameters of the EMI filter and the rectifier are required in this optimization process. As explained in Section 2, the parasitic components are also considered in order to obtain accurate results.The data used in this stage are based on the steady state behavior of the converter when it is connected to a certain load. The timespan of the acquired signals is chosen as a tradeoff between the simulation speed and the accuracy. Thus, the parameters can be estimated by analyzing two or three periods of the measured signals. The corresponding Simulink model is shown in Figure 8.
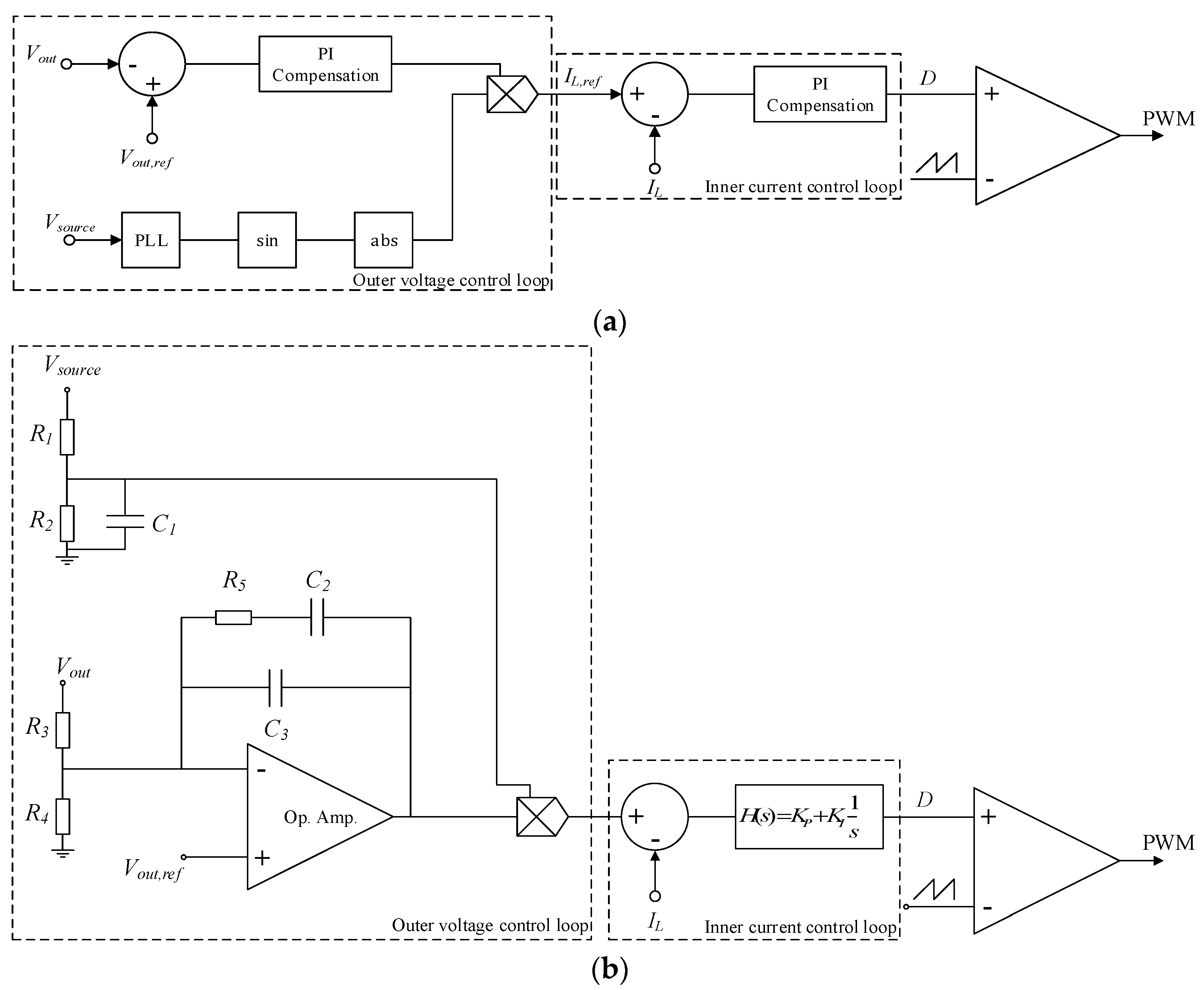
- Control parameters (closed loop): The last stage identifies the values of the boost PFC control loop parameters listed in Section 2. It also re-estimates the value of the capacitor of the converter because it affects the transient response of the outer voltage loop [24]. It uses the values estimated in the previous stages and adds the voltage and current control loops to the Simulink model. The experimental setup is the same as in the open loop identification stage. However, the converter is subjected to a load change at the output terminal to obtain its transient response. The timespan of the data acquired is chosen depending on the time that the converter requires to reach the steady state. In this stage, the NLS algorithm requires more time compared to the other stages because it uses a model with a higher complexity and a larger dataset. Figure 9 shows the corresponding Simulink model of the control loop that was added to the boost PFC presented in Figure 8.
4. Results
4.1. EMI Filter Parameter Identification
4.2. Rectifier Parameter Identification
4.3. Boost Converter Parameter Identification
4.4. Control Loop Parameter Identification
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bodetto, M.; Aroudi, A.E.; Cid-Pastor, A.; Calvente, J.; Martínez-Salamero, L. Design of AC-DC PFC high-order converters with regulated output current for low-power applications. IEEE Trans. Power Electron. 2016, 31, 2012–2025. [Google Scholar] [CrossRef]
- Ren, X.; Wu, Y.; Guo, Z.; Zhang, Z.; Chen, Q. An Online Monitoring Method of Circuit Parameters for Variable On-Time Control in CRM Boost PFC Converters. IEEE Trans. Power Electron. 2019, 34, 1786–1797. [Google Scholar] [CrossRef]
- Bayona, J.; Gélvez, N.; Espitia, H. Design, Analysis, and Implementation of an Equalizer Circuit for the Elimination of Voltage Imbalance in a Half-Bridge Boost Converter with Power Factor Correction. Electronics 2020, 9, 2171. [Google Scholar] [CrossRef]
- Bao, J.; Liu, J.; Huang, Z.; Liu, W.; Li, H. An Online Parameter Identification for Ultracapacitor Model by Using Recursive Least Square with Multi-forgetting Factor. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 962–966. [Google Scholar]
- Xu, H.; Chen, D.; Xue, F.; Li, X. Optimal design method of interleaved boost PFC for improving efficiency from switching frequency, boost inductor, and output voltage. IEEE Trans. Power Electron. 2019, 34, 6088–6107. [Google Scholar] [CrossRef]
- Kotny, J.-L.; Margueron, X.; Idir, N. High-Frequency Model of the Coupled Inductors Used in EMI Filters. IEEE Trans. Power Electron. 2012, 27, 2805–2812. [Google Scholar] [CrossRef]
- Riba, J.; Moreno-eguilaz, M.; Bogarra, S.; Garcia, A. Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models. Electronics 2018, 7, 393. [Google Scholar] [CrossRef]
- Valdivia, V. Behavioral Modeling and Identification of Power Electronics Converters and Subsystems Based on Transient Response; Universidad Carlos III de Madrid: Madrid, Spain, 2013. [Google Scholar]
- Oliver, J.A.; Prieto, R.; Romero, V.; Cobos, J.A. Behavioural Modelling of DC-DC Converters for Large-Signal Simulation of Distributed Power Systems. In Proceedings of the Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, 2006. APEC’06., Dallas, TX, USA, 18 April 2006. [Google Scholar] [CrossRef]
- Wang, L.; Deng, X.; Han, P.; Qi, X.; Wu, X.; Li, M.; Xu, H. Electromagnetic Transient Modeling and Simulation of Power Converters Based on a Piecewise Generalized State Space Averaging Method. IEEE Access 2019, 7, 12241–12251. [Google Scholar] [CrossRef]
- Nabinejad, A.; Rajaei, A.; Mardaneh, M. A Systematic Approach to Extract State-Space Averaged Equations and Small-Signal Model of Partial-Power Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2475–2483. [Google Scholar] [CrossRef]
- Ahmeid, M.; Armstrong, M.; Gadoue, S.; Algreer, M.; Missailidis, P.; Al-Greer, M.; Missailidis, P. Real-Time Parameter Estimation of DC–DC Converters Using a Self-Tuned Kalman Filter. IEEE Trans. Power Electron. 2017, 32, 5666–5674. [Google Scholar] [CrossRef]
- Algreer, M.; Armstrong, M.; Giaouris, D. Active Online System Identification of Switch Mode DC–DC Power Converter Based on Efficient Recursive DCD-IIR Adaptive Filter. IEEE Trans. Power Electron. 2012, 27, 4425–4435. [Google Scholar] [CrossRef]
- Buiatti, G.M.; Amaral, A.M.R.; Cardoso, A.J.M. An unified method for estimating the parameters of non-isolated DC/DC converters using continuous time models. Telecommun. Energy Conf. 2007. INTELEC 2007. 29th Int. 2007, 334–341. [Google Scholar] [CrossRef]
- Rojas-Duenas, G.; Riba, J.-R.; Kahalerras, K.; Moreno-Eguilaz, M.; Kadechkar, A.; Gomez-Pau, A. Black-Box Modelling of a DC-DC Buck Converter Based on a Recurrent Neural Network. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; Institute of Electrical and Electronics Engineers (IEEE): Buenos Aires, Argentina, 2020; pp. 456–461. [Google Scholar]
- Rojas-Dueñas, G.; Riba, J.-R.; Moreno-Eguilaz, M. Non-Linear Least Squares Optimization for Parametric Identification of DC-DC Converters. IEEE Trans. Power Electron. 2021, 36, 654–661. [Google Scholar] [CrossRef]
- Al-Greer, M.; Armstrong, M.; Ahmeid, M.; Giaouris, D. Advances on system identification techniques for DC-DC switch mode power converter applications. IEEE Trans. Power Electron. 2019, 34, 6973–6990. [Google Scholar] [CrossRef]
- Labarre, C.; Costa, F. Circuit analysis of an EMI filter for the prediction of its magnetic near-field emissions. IEEE Trans. Electromagn. Compat. 2012, 54, 290–298. [Google Scholar] [CrossRef]
- Wang, N.; Yan, Z.; Tang, J.; Ning, Z.; Xiao, B.; Wang, H. Study on Prediction Models of EMI Filter with Near-field Coupling Effect. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory, ISAPE 2018—Proceedings, Hangzhou, China, 3–6 December 2018; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2019. [Google Scholar]
- Narayanasamy, B.; Luo, F.; Chu, Y. Modeling and Stability Analysis of Voltage Sensing based Differential Mode Active EMI Filters for AC-DC Power Converters. In Proceedings of the 2018 IEEE Symposium on Electromagnetic Compatibility, Signal Integrity and Power Integrity, EMC, SI and PI 2018, Long Beach, CA, USA, 30 July–3 August 2018; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2018. [Google Scholar]
- Zhang, R.; Ma, W.; Wang, L.; Hu, M.; Cao, L.; Zhou, H.; Zhang, Y. Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter. Electronics 2018, 7, 203. [Google Scholar] [CrossRef]
- Singh, A.; Mallik, A.; Khaligh, A. A Comprehensive Design and Optimization of the DM EMI Filter in a Boost PFC Converter. In Proceedings of the IEEE Transactions on Industry Applications; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2018; Volume 54, pp. 2023–2031. [Google Scholar]
- Pelz, B.; Belkadi, A.; Moddel, G. Avoiding erroneous analysis of MIM diode current-voltage characteristics through exponential fitting. Meas. J. Int. Meas. Confed. 2018, 120, 28–33. [Google Scholar] [CrossRef]
- Chu, G.; Tse, C.K.; Wong, S.C.; Tan, S.C. A unified approach for the derivation of robust control for boost PFC converters. IEEE Trans. Power Electron. 2009, 24, 2531–2544. [Google Scholar] [CrossRef]
- Lee, S.W.; Management, P. Application Report Demystifying Type II and Type III Compensators Using Op-Amp and OTA for DC/DC Converters; Texas Instruments: Dallas, TX, USA, 2014. [Google Scholar]
- Alonge, F.; D’Ippolito, F.; Raimondi, F.M.; Tumminaro, S. Nonlinear modeling of DC/DC converters using the Hammerstein’s approach. IEEE Trans. Power Electron. 2007, 22, 1210–1221. [Google Scholar] [CrossRef]
- Le, T.M.; Fatahi, B.; Khabbaz, H.; Sun, W. Numerical optimization applying trust-region reflective least squares algorithm with constraints to optimize the non-linear creep parameters of soft soil. Appl. Math. Model. 2017, 41, 236–256. [Google Scholar] [CrossRef]
- Wu, L.; Chen, Z.; Long, C.; Cheng, S.; Lin, P.; Chen, Y.; Chen, H. Parameter extraction of photovoltaic models from measured I-V characteristics curves using a hybrid trust-region reflective algorithm. Appl. Energy 2018, 232, 36–53. [Google Scholar] [CrossRef]
- Ahsan, M.; Choudhry, M.A. System identification of an airship using trust region reflective least squares algorithm. Int. J. Control. Autom. Syst. 2017, 15, 1384–1393. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Line voltage range | 88 to 265 VAC |
| Output voltage | 400 VDC |
| Rated output power | 80 W |
| Switching frequency | 35 kHz |
| Minimum efficiency | 92% |
| Parameter | Minimum (lb) | Maximum (ub) | Initial | Actual (Datasheet) | Identified | Error |
|---|---|---|---|---|---|---|
| R | 1 Ω | 1 MΩ | 1 kΩ | 270 kΩ | 260.15 kΩ | 3.67% |
| C1 | 1 nF | 1 mF | 1 μF | 0.68 μF | 0.62 µF | 8.82% |
| C2 | 1 nF | 1 mF | 1 μF | 0.47 μF | 0.45 µF | 4.26% |
| C3 | 1 nF | 1 mF | 1 μF | 0.01 μF | 0.0103 µF | 3% |
| C4 | 1 nF | 1 mF | 1 μF | 0.01 μF | 0.0103 µF | 3% |
| C5 | 1 nF | 1 mF | 1 μF | 0.0055 μF | 0.0047 µF | 14.5% |
| C6 | 1 nF | 1 mF | 1 μF | 0.0055 μF | 0.0047 µF | 14.5% |
| L1 | 10 nH | 10 mH | 10 μH | 6.36 mH | 6.42 mH | 0.94% |
| L2 | 10 nH | 10 mH | 10 μH | 6.36 mH | 6.42 mH | 0.94% |
| L3 | 10 nH | 10 mH | 10 μH | 0.06 mH | 0.059 mH | 1.7% |
| L4 | 10 nH | 10 mH | 10 μH | 1.47 mH | 1.35 mH | 8.16% |
| L5 | 10 nH | 10 mH | 10 μH | 1.47 mH | 1.35 mH | 8.16% |
| Parameter | Minimum (lb) | Maximum (ub) | Initial | Actual (Datasheet) | Identified | Error |
|---|---|---|---|---|---|---|
| IS | 1 pA | 1 mA | 1 µA | - | 4.86 mA | - |
| Tm | 270 K | 350 K | 300 K | - | 328.2 K | - |
| N | 0 | 2 | 1 | - | 0.1494 | - |
| Rdiode | 1 µΩ | 1 Ω | 1 mΩ | - | 12 mΩ | - |
| Csmooth | 1 nF | 1 mF | 1 μF | 0.22 μH | 0.2112 μH | 4% |
| Parameter | Minimum (lb) | Maximum (ub) | Initial | Actual (Datasheet) | Identified | Error |
|---|---|---|---|---|---|---|
| C | 1 nF | 1 mF | 1 μF | 47 μF | 33.2 μF | 29.4% |
| RC | 1 µΩ | 1 Ω | 1 mΩ | 19.4 mΩ | 20.02 mΩ | 3.20% |
| L | 10 nH | 10 mH | 10 μH | 0.7 mH | 0.701 mH | 0.14% |
| RL | 1 µΩ | 1 Ω | 1 mΩ | - | 9.72 mΩ | - |
| RS1 | 1 µΩ | 1 Ω | 1 mΩ | 860 mΩ | 882.8 mΩ | 2.65% |
| RS2 | 1 µΩ | 1 Ω | 1 mΩ | - | 114.2 mΩ | - |
| Parameter | Minimum (lb) | Maximum (ub) | Initial | Actual (Datasheet) | Identified | Error |
|---|---|---|---|---|---|---|
| C | 1 μF | 100 μF | 33.2 μF | 47 μF | 44.2 μF | 5.96% |
| R1 | 10 Ω | 10 MΩ | 10 kΩ | 2 MΩ | 1.973 MΩ | 1.35% |
| R2 | 10 Ω | 10 MΩ | 10 kΩ | 15 kΩ | 14.82 kΩ | 1.2% |
| R3 | 10 Ω | 10 MΩ | 10 kΩ | 2 MΩ | 2.05 MΩ | 2.5% |
| R4 | 10 Ω | 10 MΩ | 10 kΩ | 12.7 kΩ | 12.002 kΩ | 5.50% |
| R5 | 10 Ω | 10 MΩ | 10 kΩ | 22 kΩ | 22.36 kΩ | 1.64% |
| C1 | 1 nF | 1 mF | 1 μF | 10 nF | 9.38 nF | 6.2% |
| C2 | 1 nF | 1 mF | 1 μF | 2200 nF | 2096.5 nF | 4.7% |
| C3 | 1 nF | 1 mF | 1 μF | 150 nF | 148.3 nF | 1.13% |
| KP | 10−6 | 106 | 1 | - | 0.0892 | - |
| KI | 10−6 | 106 | 1 | - | 1258.5 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Dueñas, G.; Riba, J.-R.; Moreno-Eguilaz, M. Parameter Estimation of a Single-Phase Boost PFC Converter with EMI Filter Based on an Optimization Algorithm. Electronics 2021, 10, 1231. https://doi.org/10.3390/electronics10111231
Rojas-Dueñas G, Riba J-R, Moreno-Eguilaz M. Parameter Estimation of a Single-Phase Boost PFC Converter with EMI Filter Based on an Optimization Algorithm. Electronics. 2021; 10(11):1231. https://doi.org/10.3390/electronics10111231
Chicago/Turabian StyleRojas-Dueñas, Gabriel, Jordi-Roger Riba, and Manuel Moreno-Eguilaz. 2021. "Parameter Estimation of a Single-Phase Boost PFC Converter with EMI Filter Based on an Optimization Algorithm" Electronics 10, no. 11: 1231. https://doi.org/10.3390/electronics10111231
APA StyleRojas-Dueñas, G., Riba, J.-R., & Moreno-Eguilaz, M. (2021). Parameter Estimation of a Single-Phase Boost PFC Converter with EMI Filter Based on an Optimization Algorithm. Electronics, 10(11), 1231. https://doi.org/10.3390/electronics10111231