Energy Saving Estimation of Athens Trolleybuses Considering Regenerative Braking and Improved Control Scheme



Abstract
:1. Introduction
2. Existing and Proposed Driving Scheme
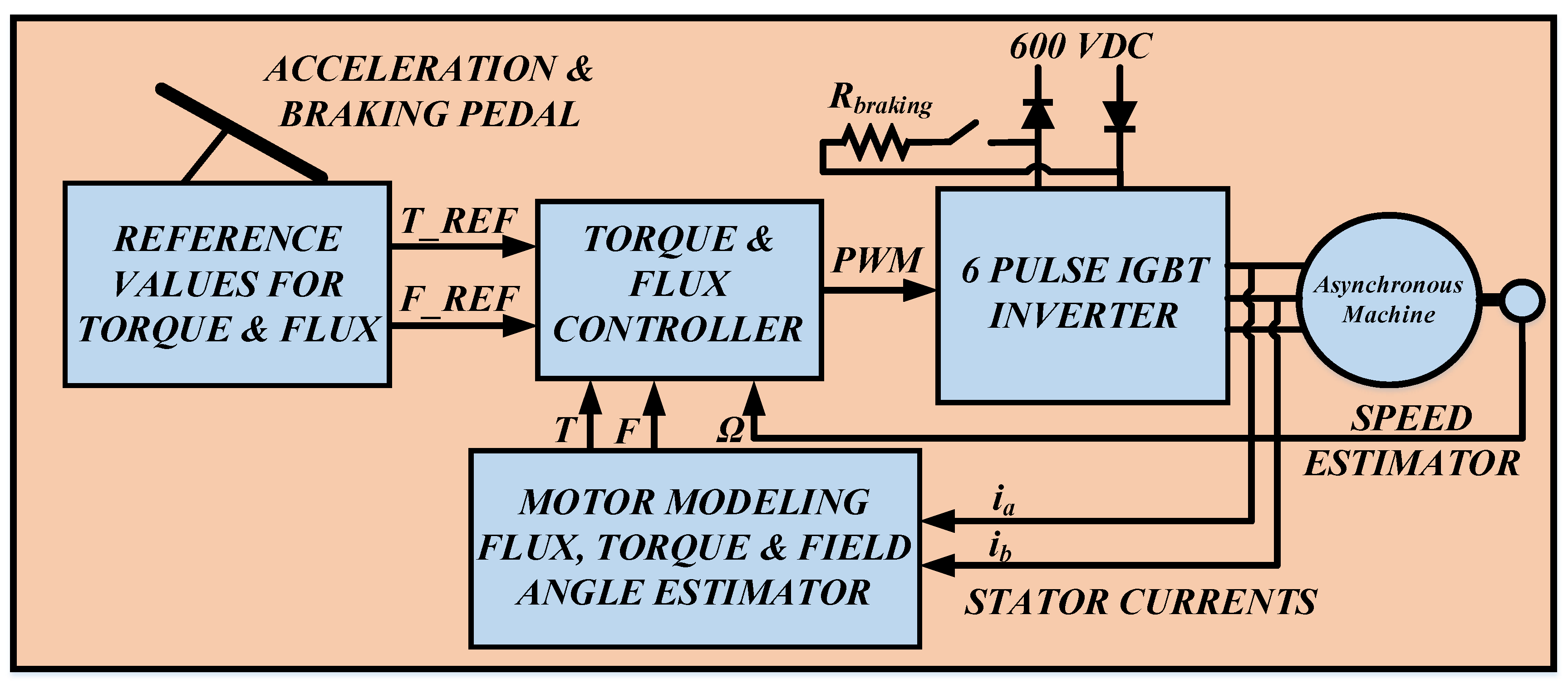
2.1. Existing Driving Scheme—Direct Vector Control
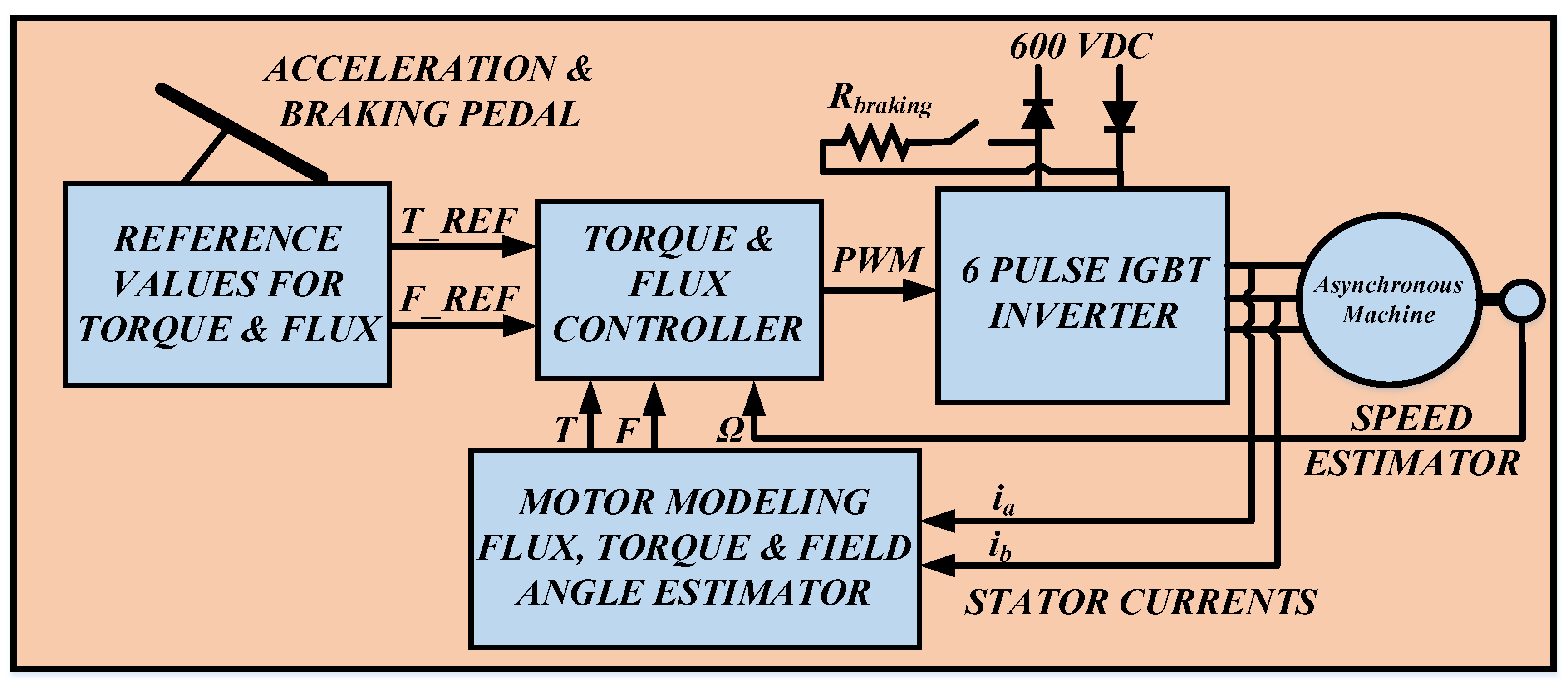
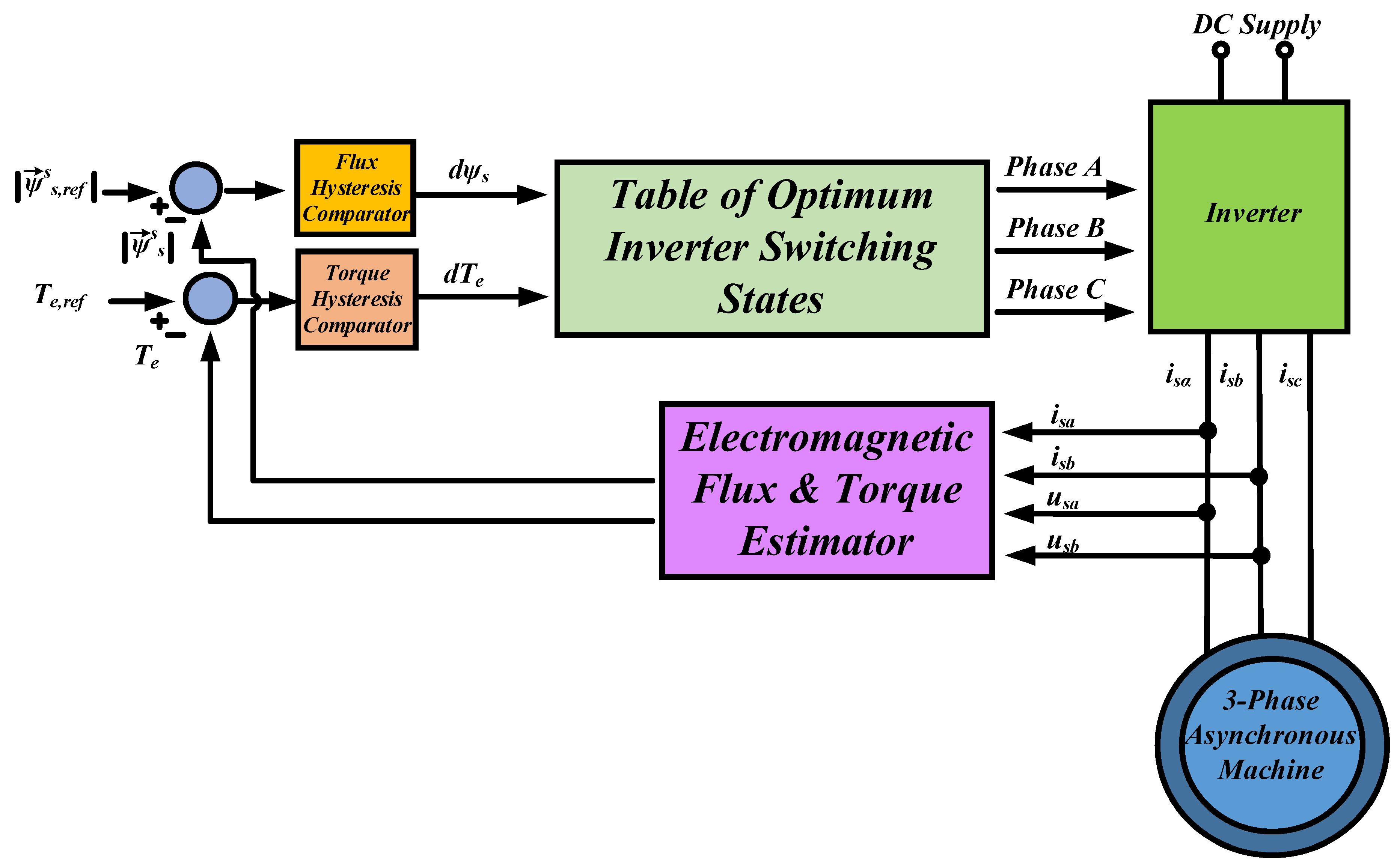
2.2. Proposed Control Scheme—Direct Torque Control
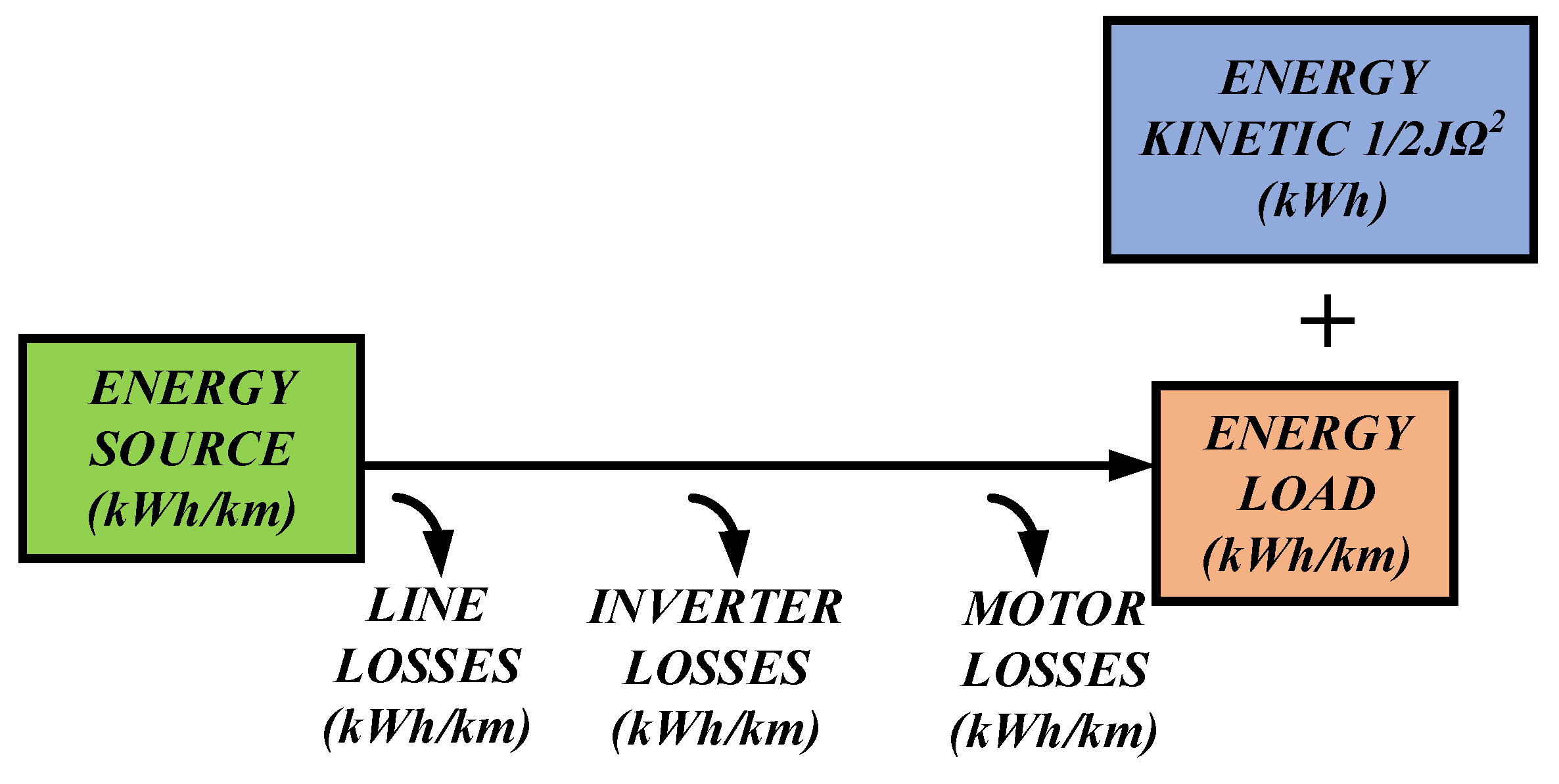
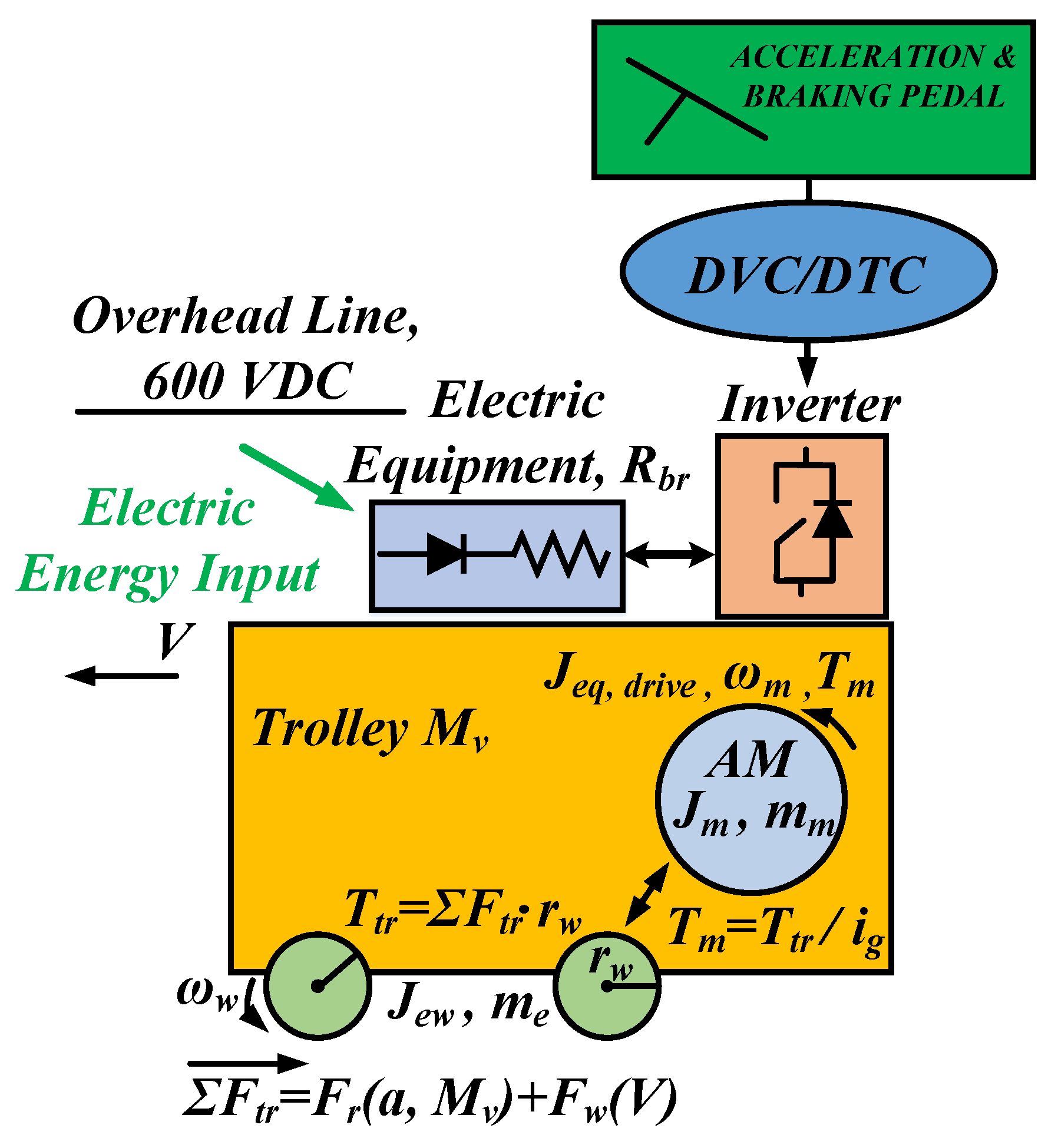
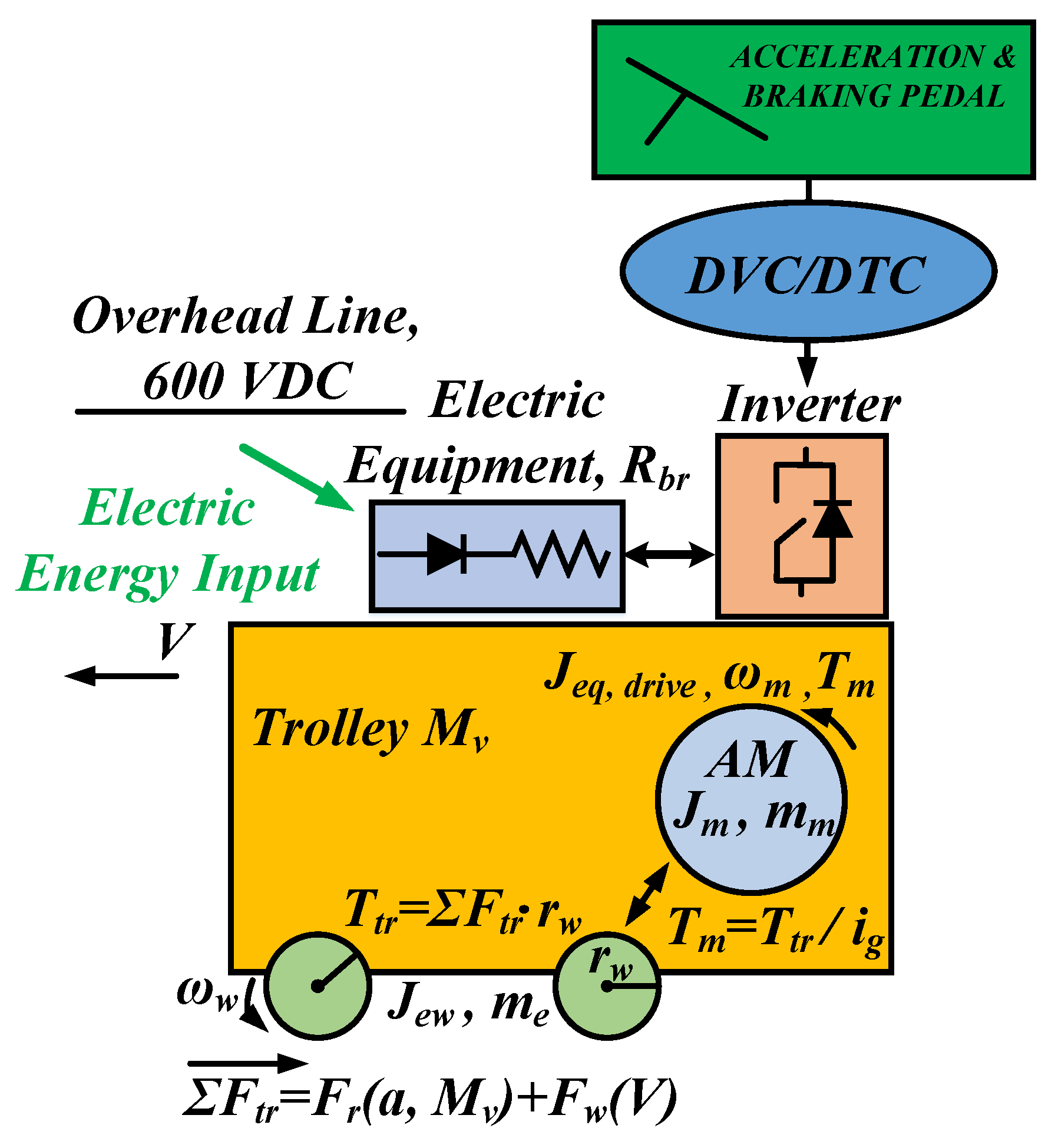
3. Modeling of the Electromechanical System
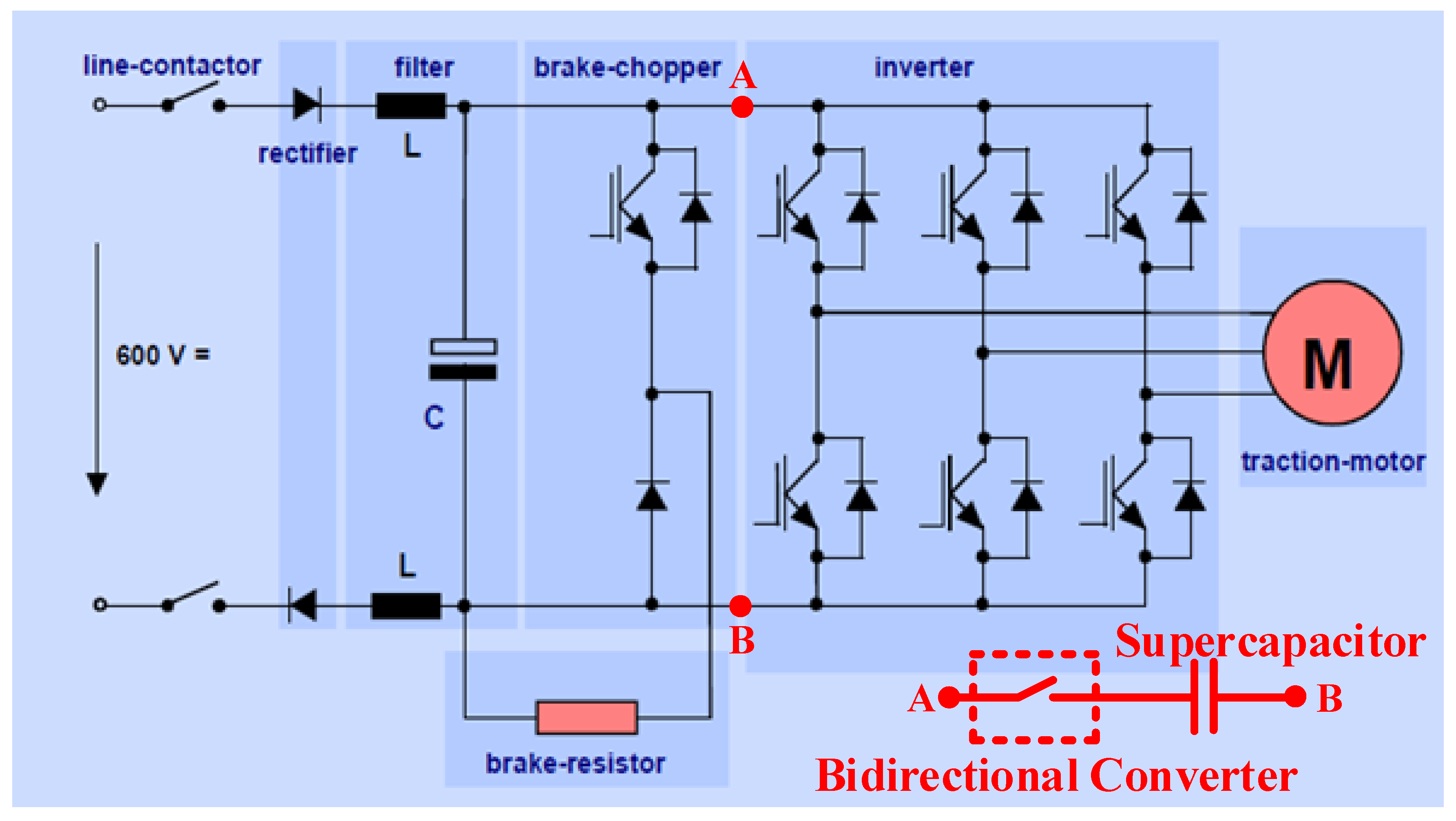
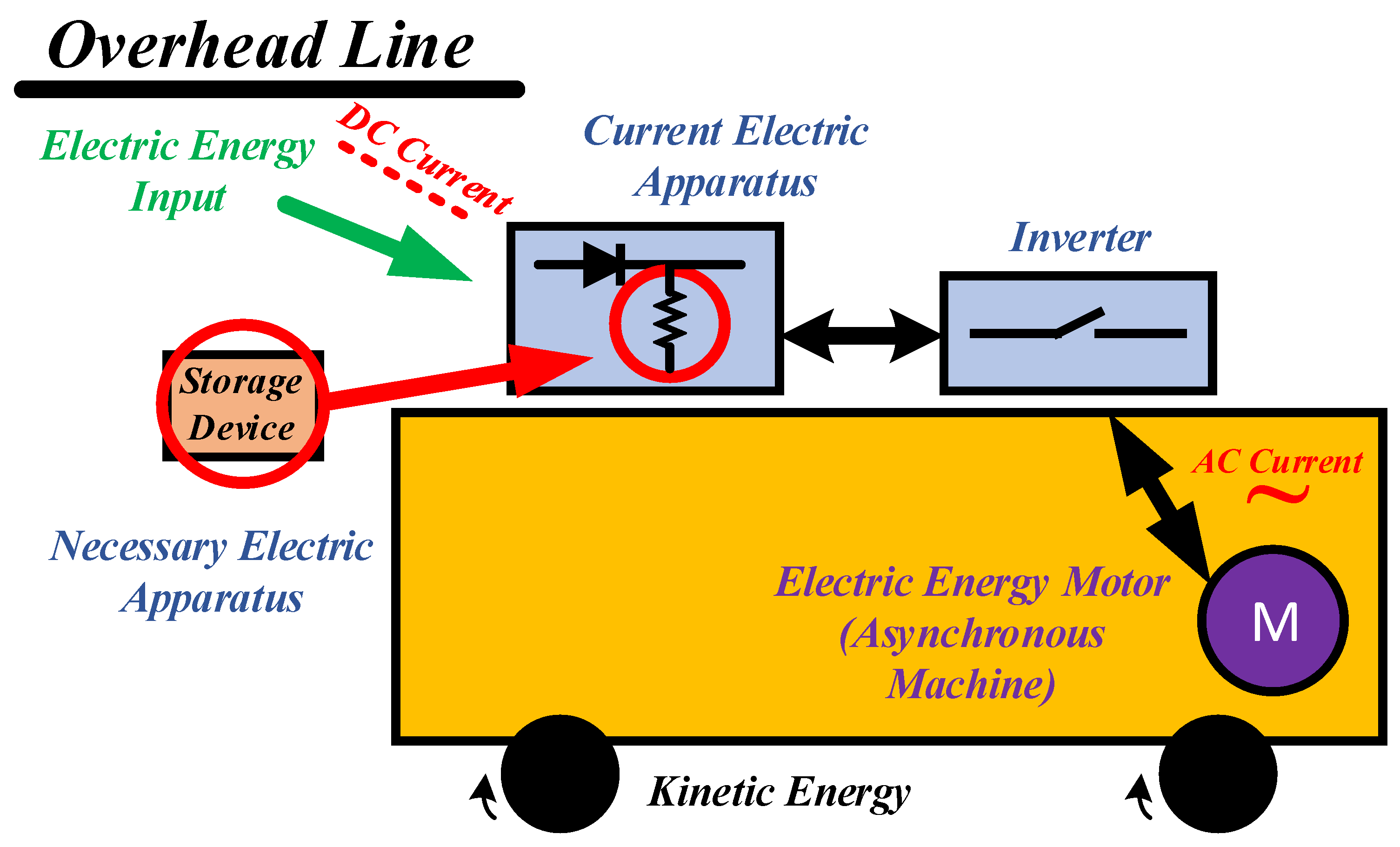
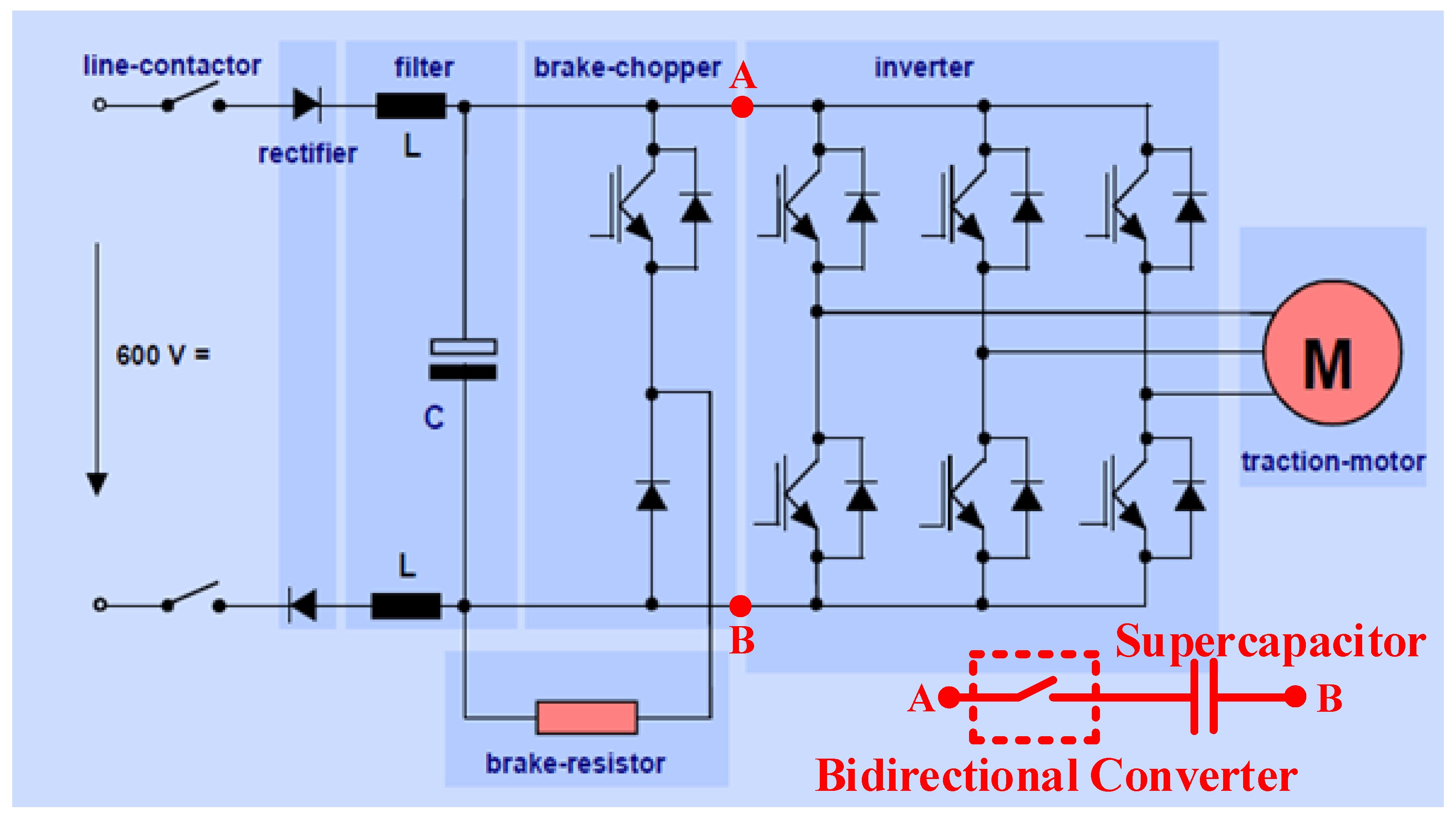
3.1. Electric Supply Circuit
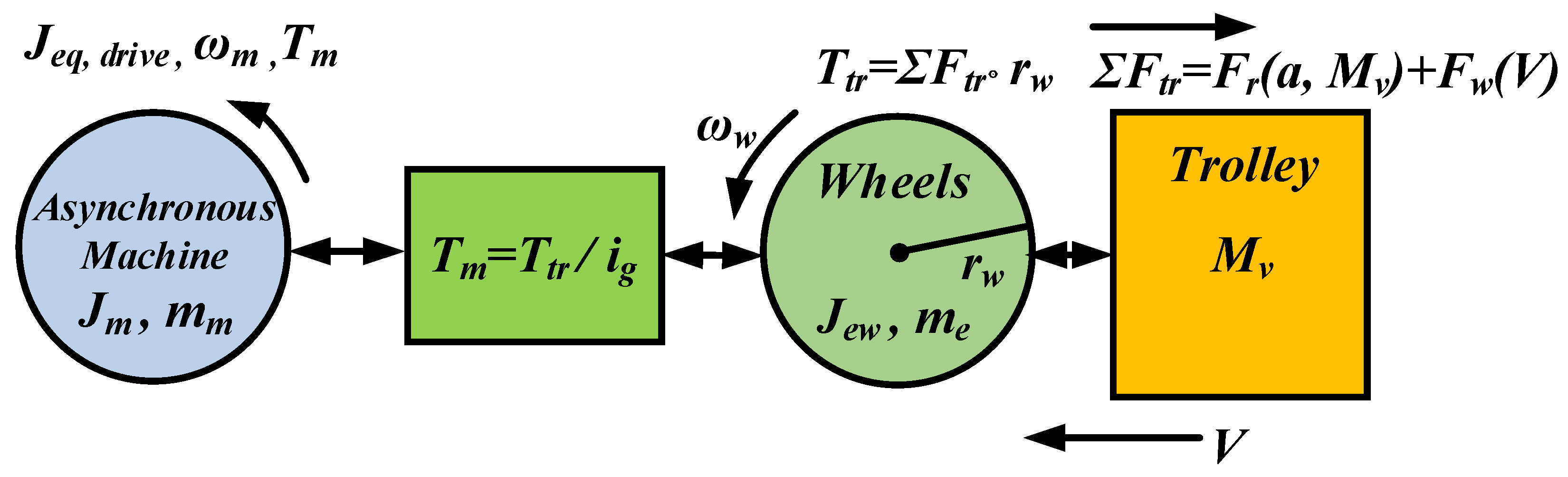
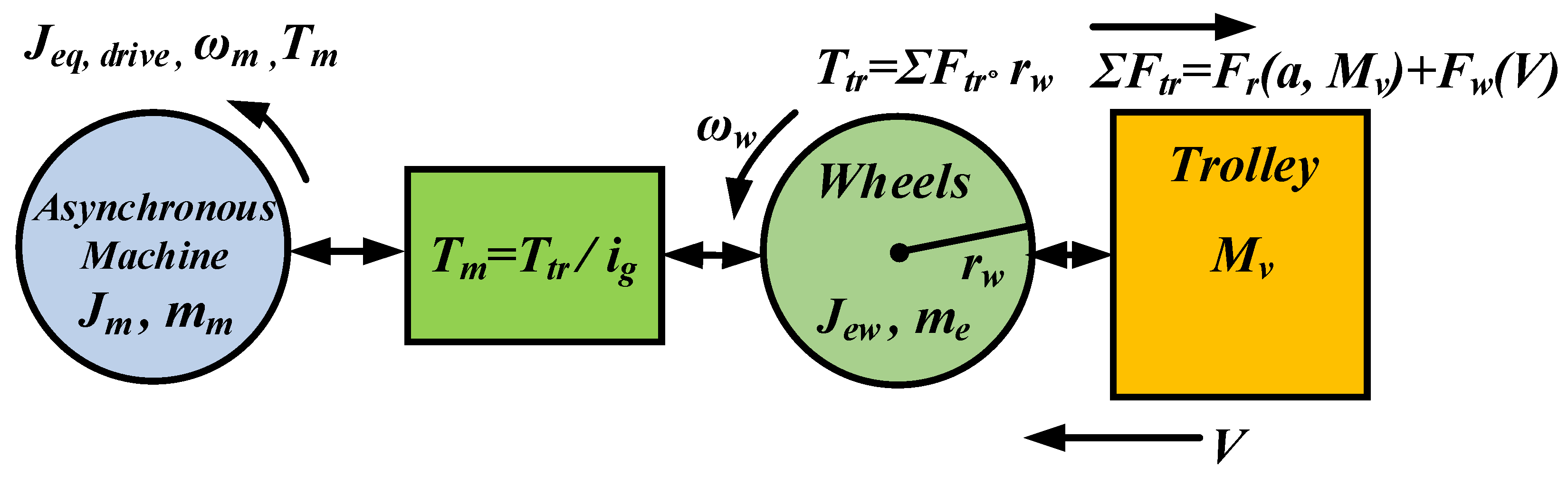
3.2. Mechanical Modeling of the Trolleybus
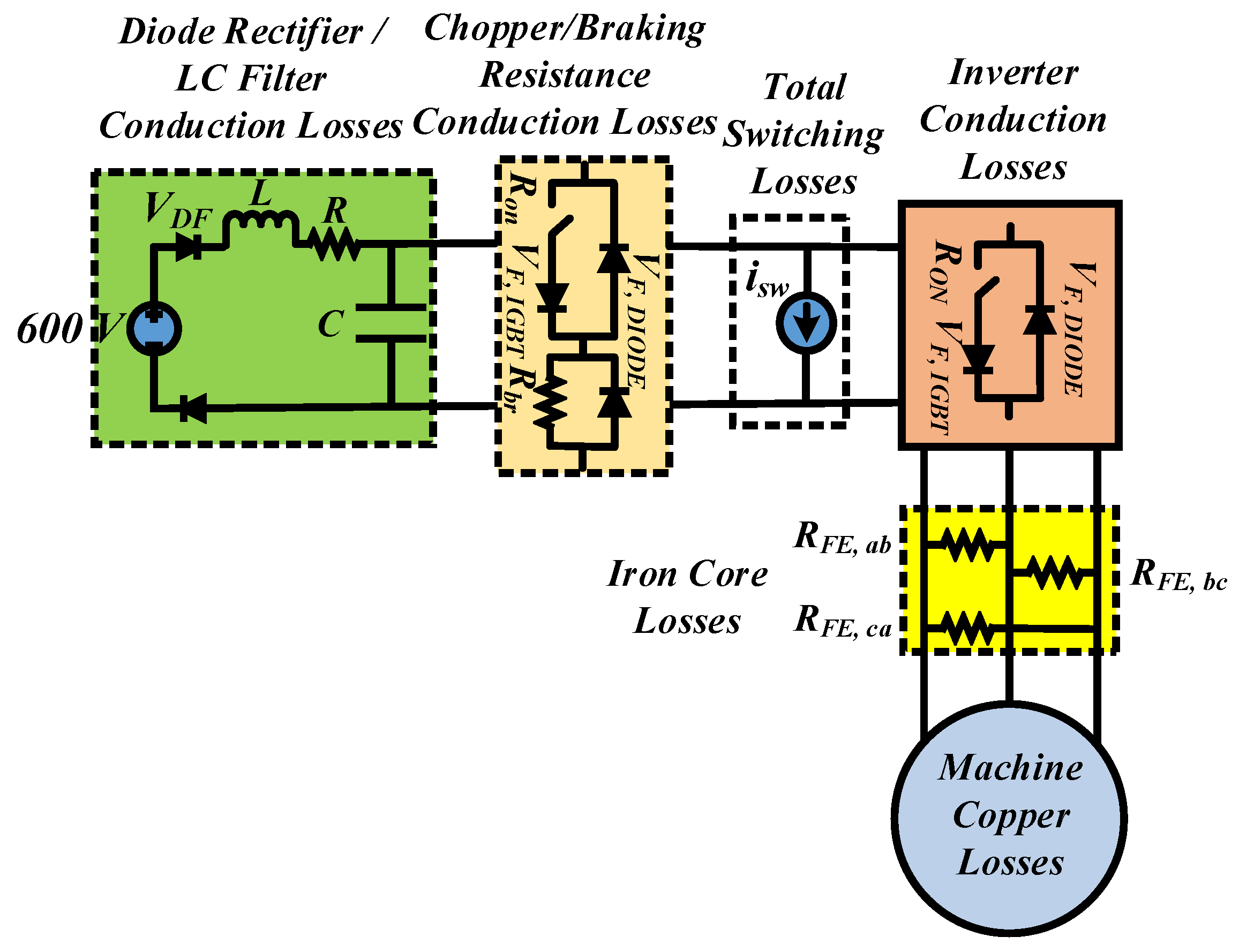
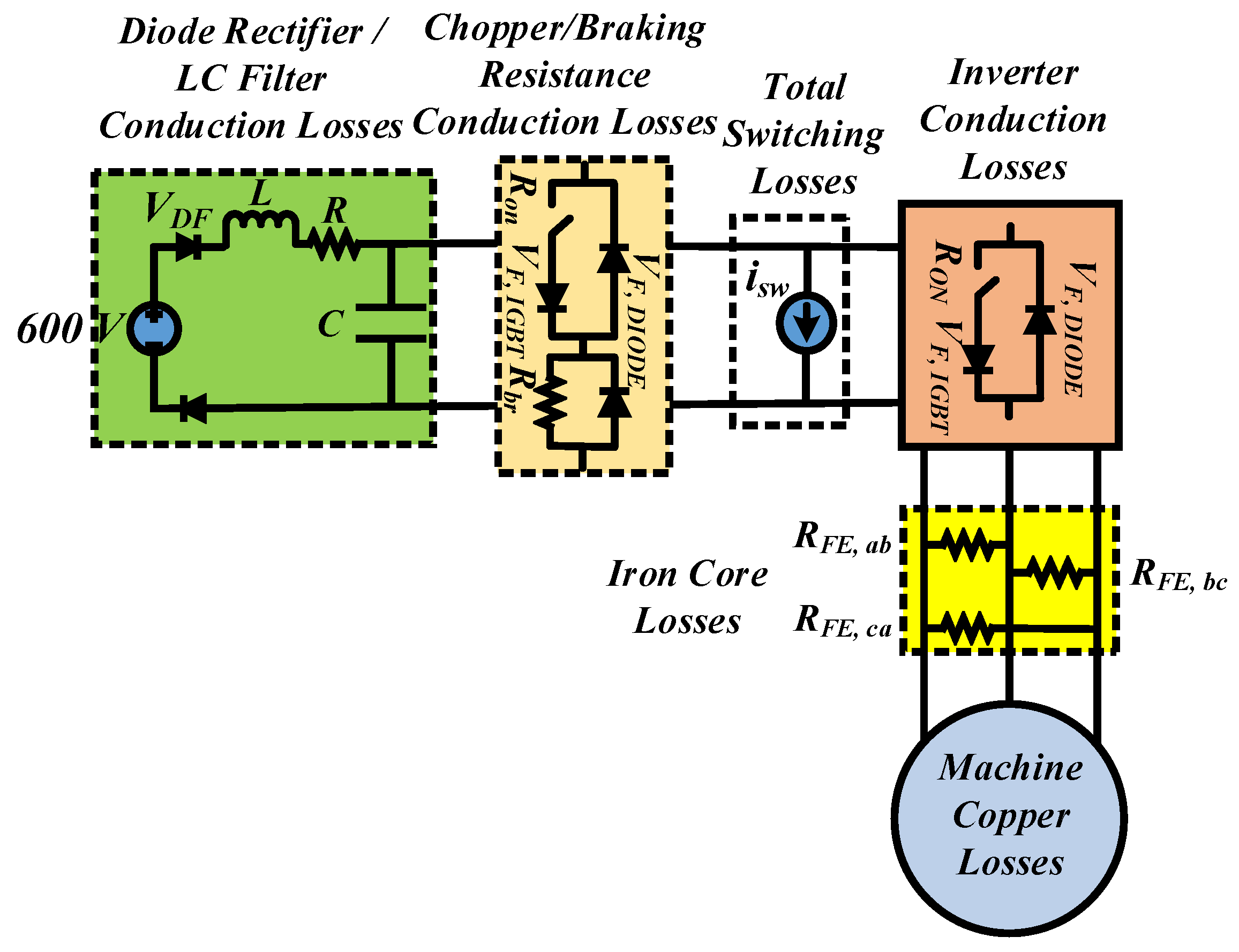
3.3. Electrical Modeling of the Trolleybus
3.4. Matlab/Simulink Behavioral Model
4. Energy Consumption Estimations Using DVC and DTC—Comparison of Results
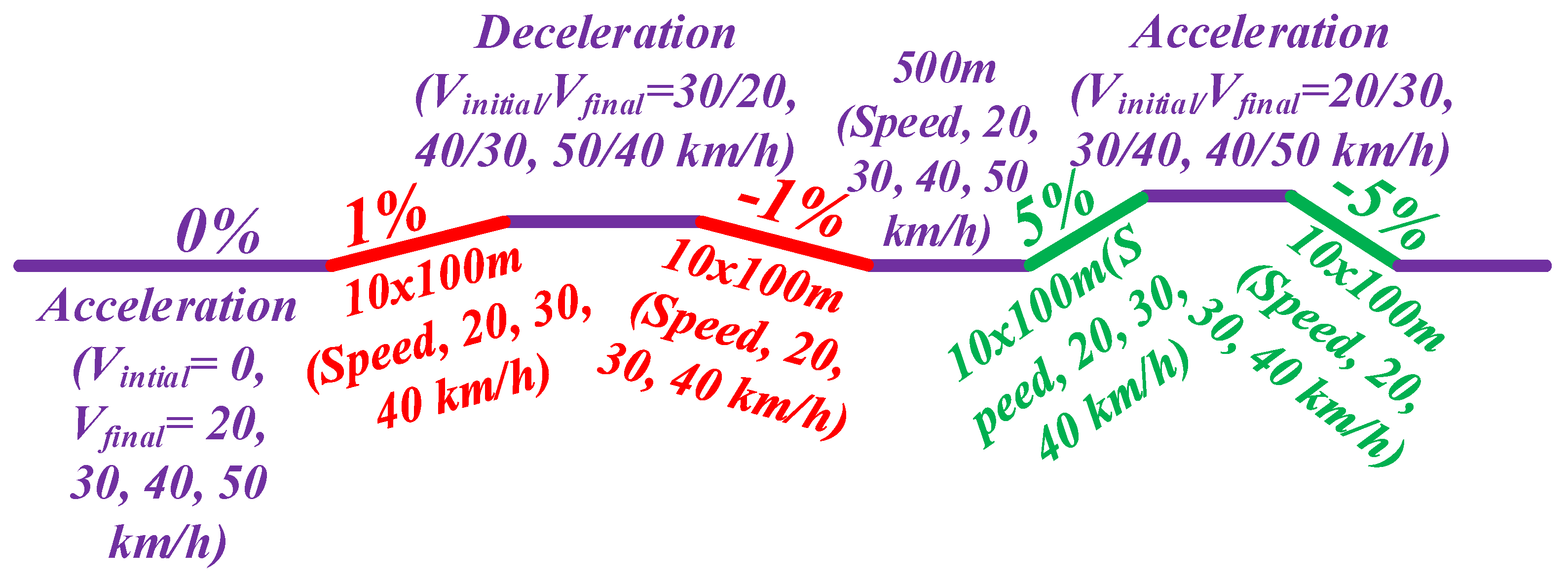
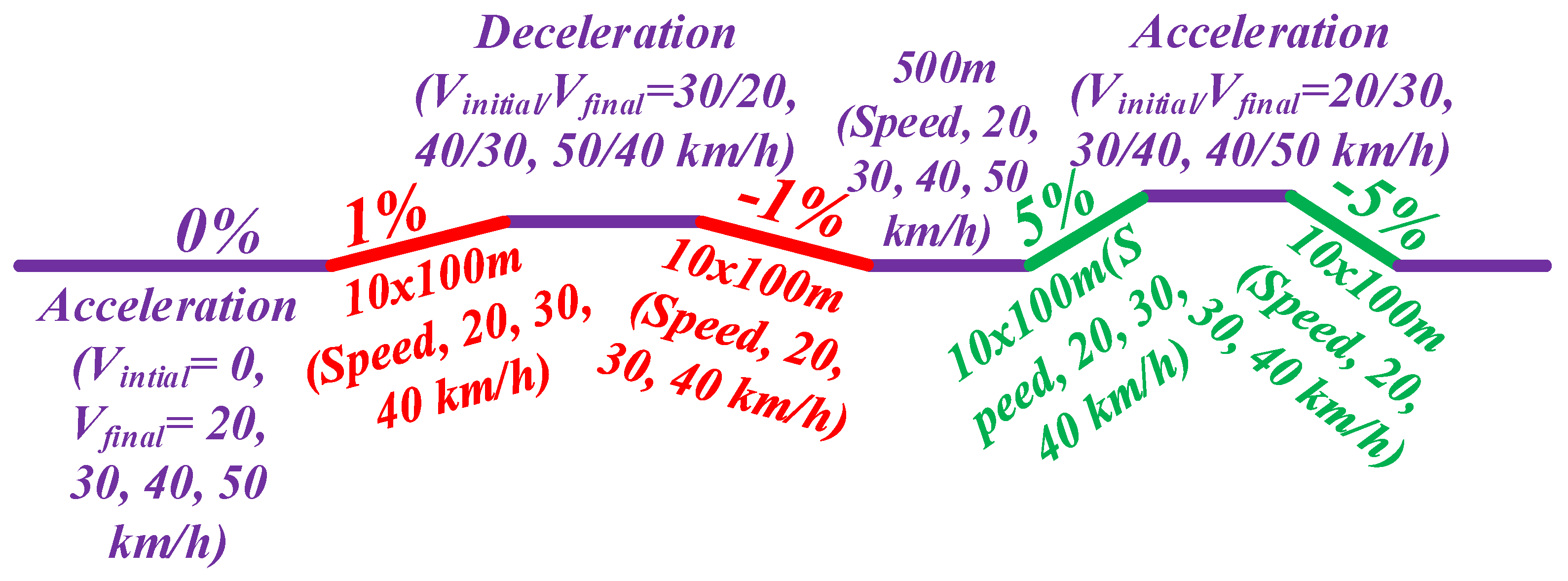
4.1. Trolleybus Traveling Conditions under Study
- Minimum (Mv = 14,000 kg) and maximum (Mv = 20,000 kg) passenger load.
- Accelerating from zero to different speeds—up to 65 km/h—assuming zero-inclined road.
- Acceleration at intermediate speeds, assuming zero-inclined road.
- Decelerating from maximum trolley speed (65 km/h) [1] to various speeds, assuming zero-inclined road.
- Decelerations from intermediate speeds, assuming zero-inclined road.
- Steady-speed courses (10, 20, 30, 40, and 50 km/h), assuming 0%, 1%, 5%, −1% and, −5% road inclination, respectively.
- DVC and DTC driving schemes.
- In DVC case, asynchronous machine slip is 1%.
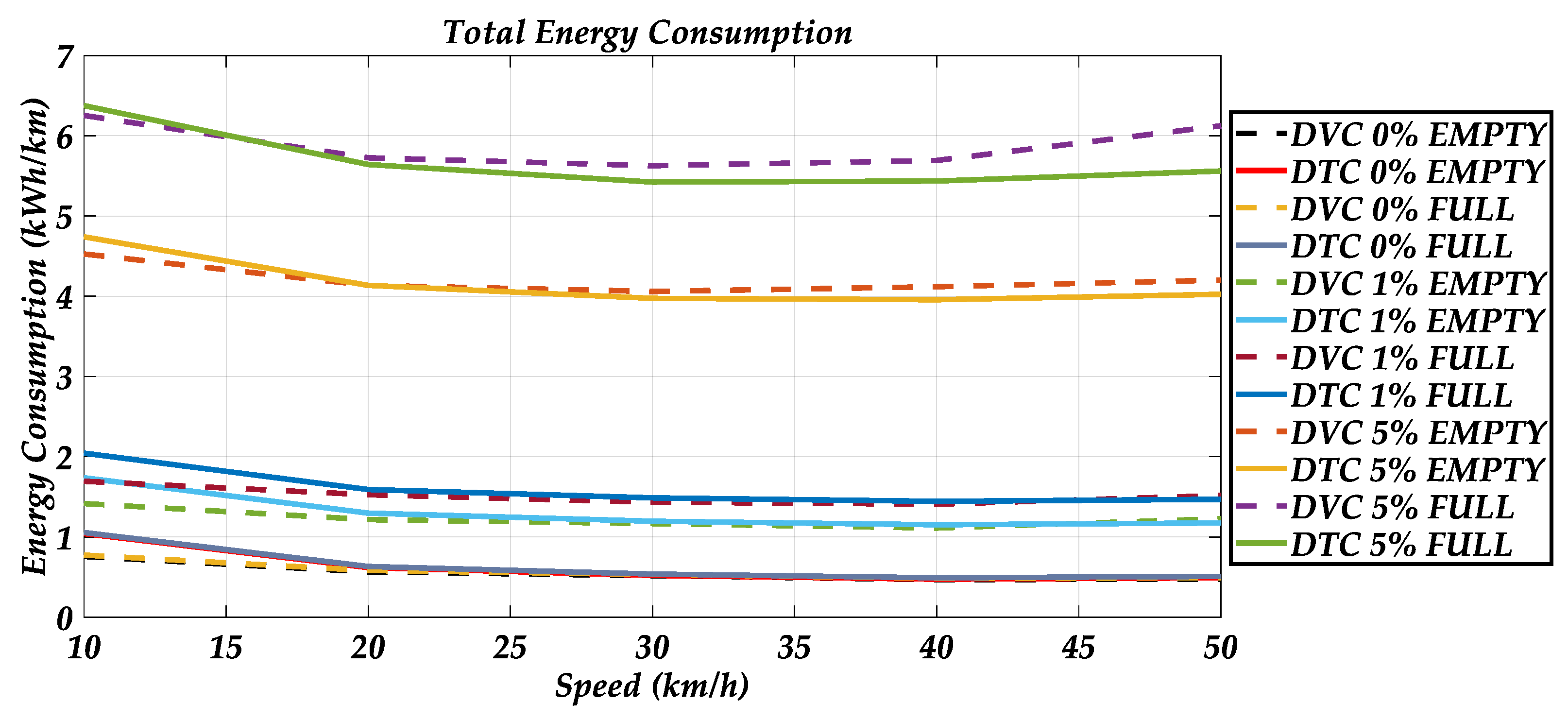
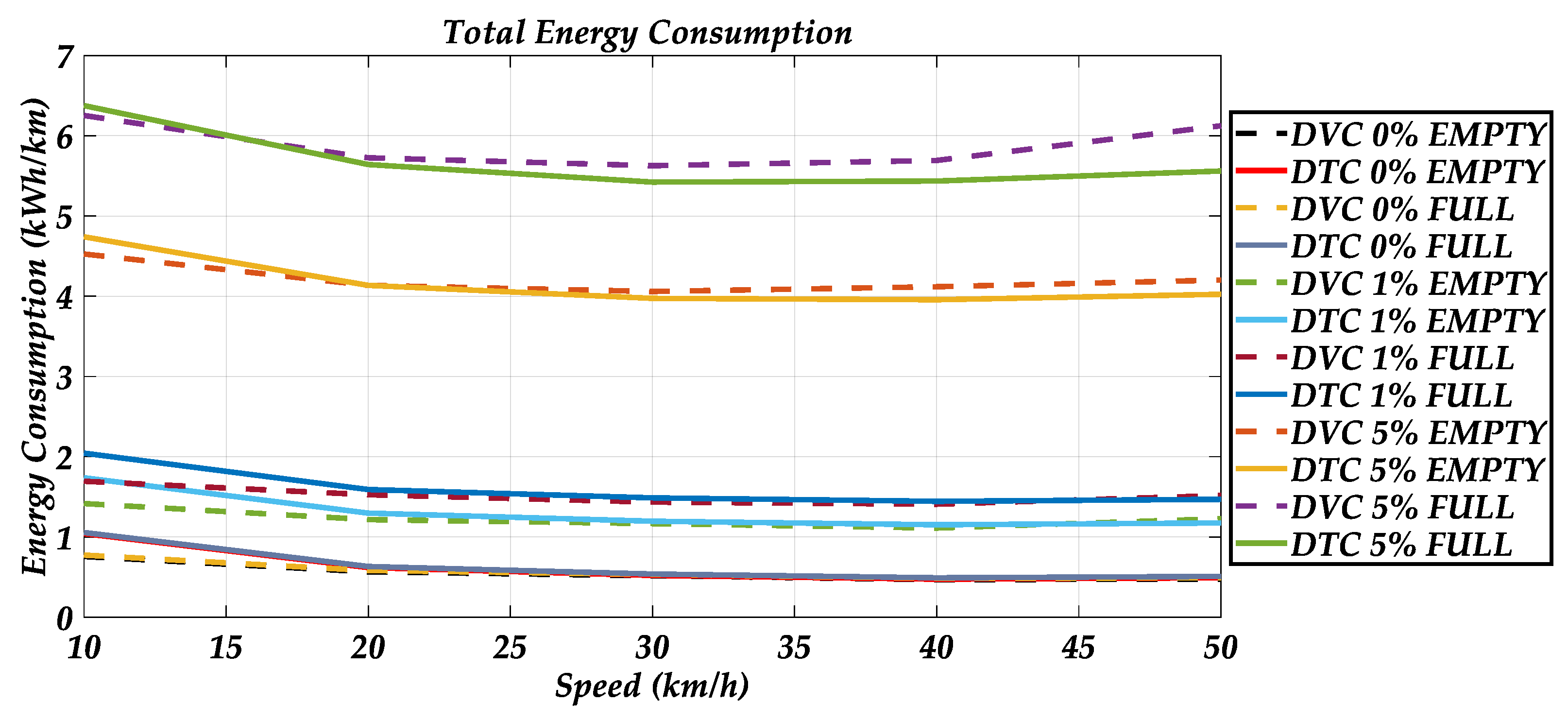
4.2. Energy Consumption Estimations—Constant Speed Course
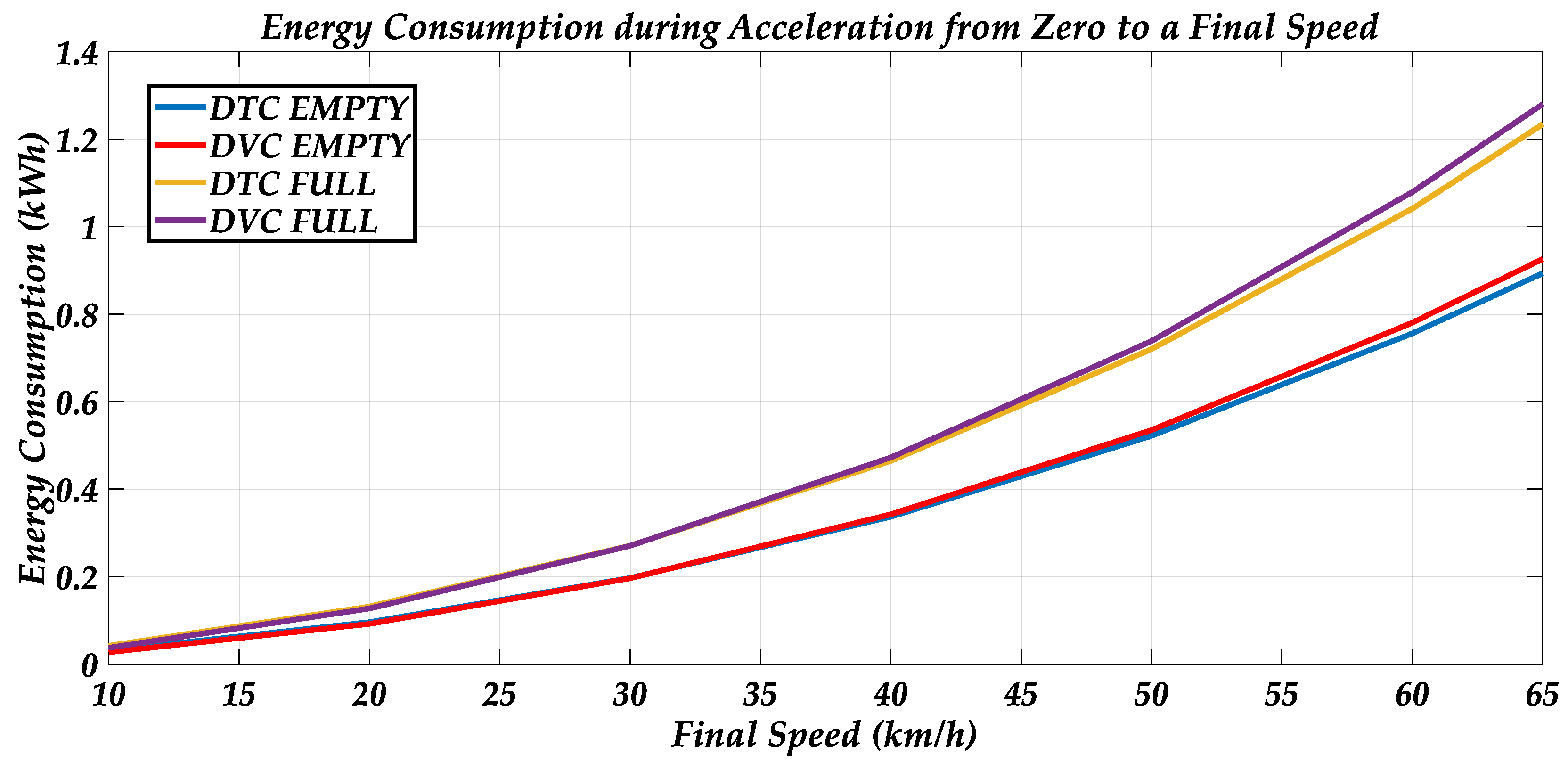
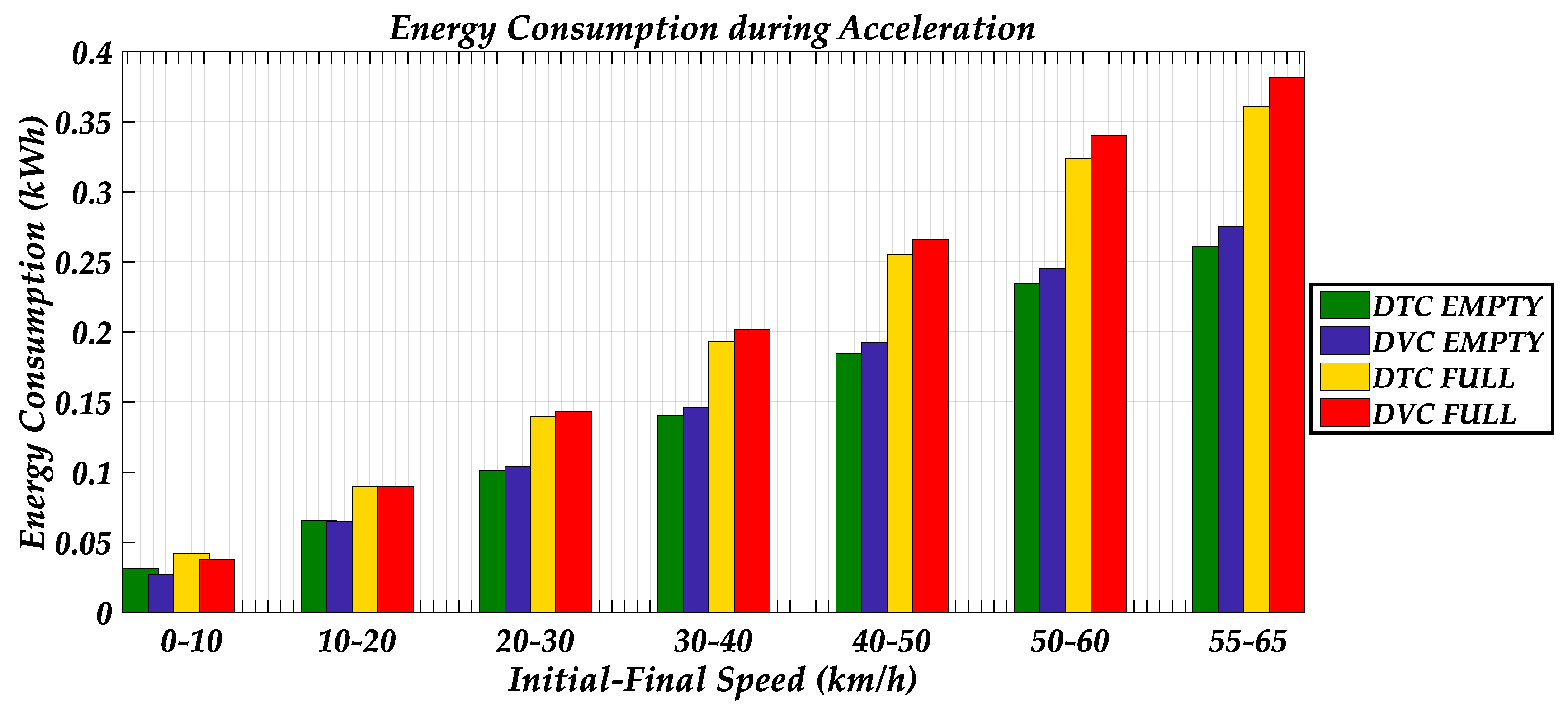
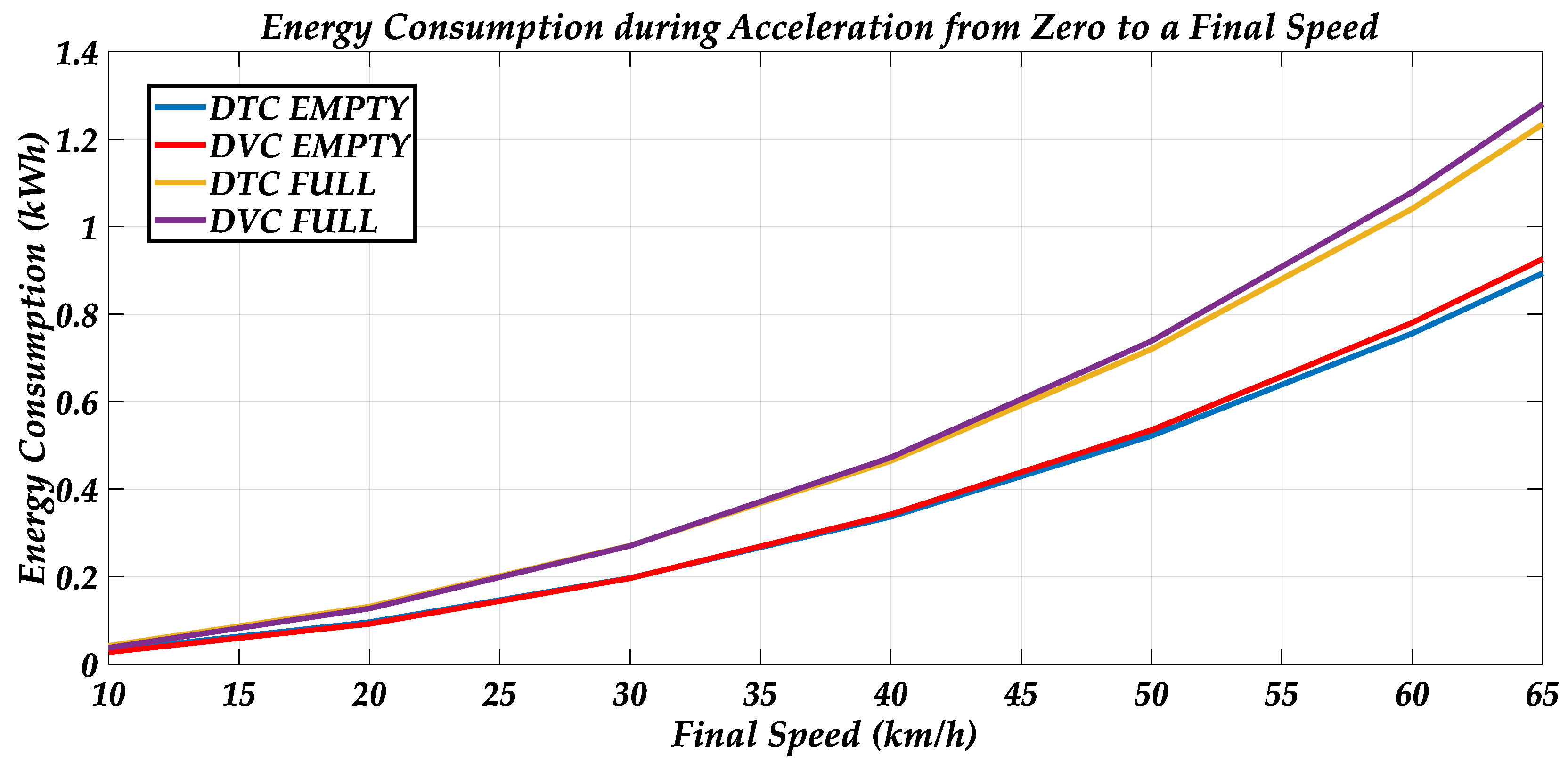
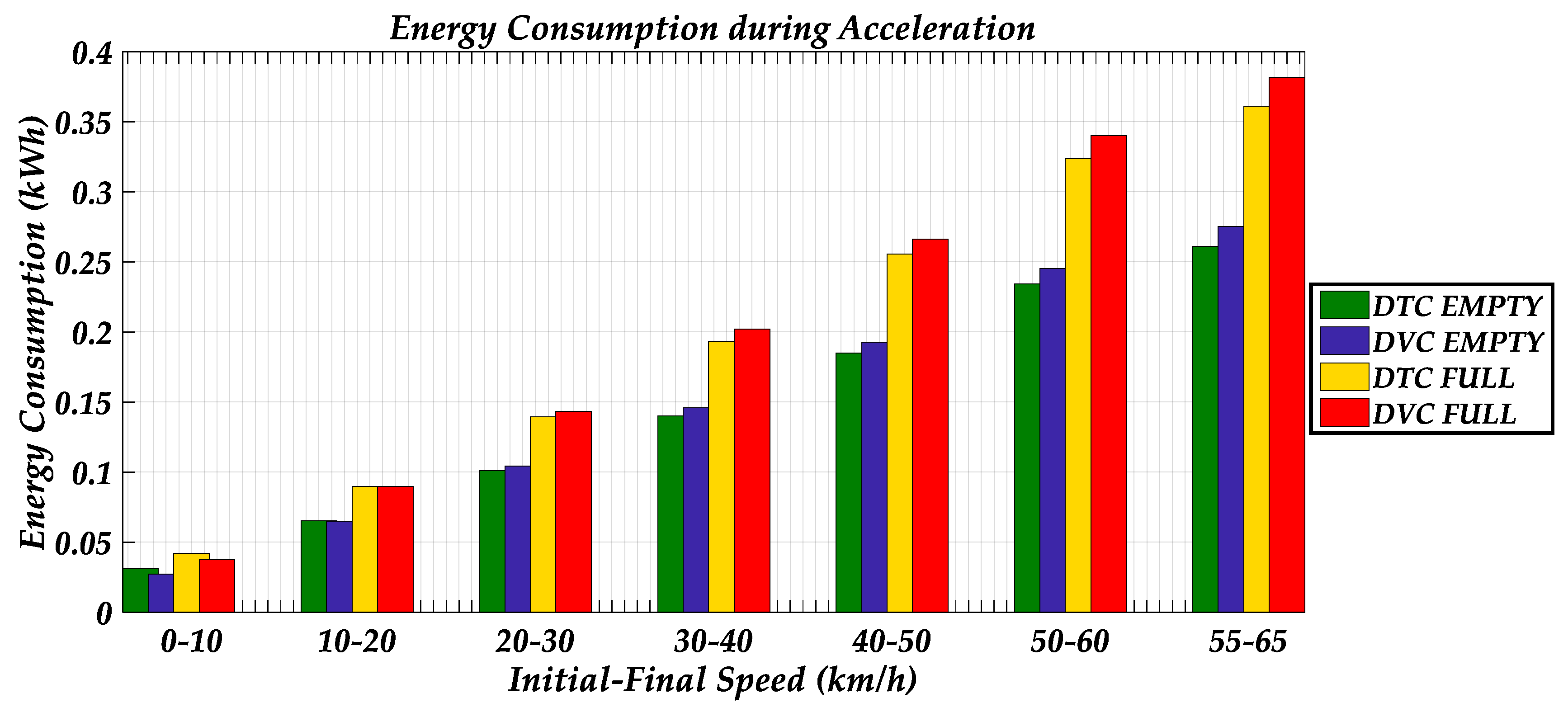
4.3. Energy Consumption Estimations—Acceleration
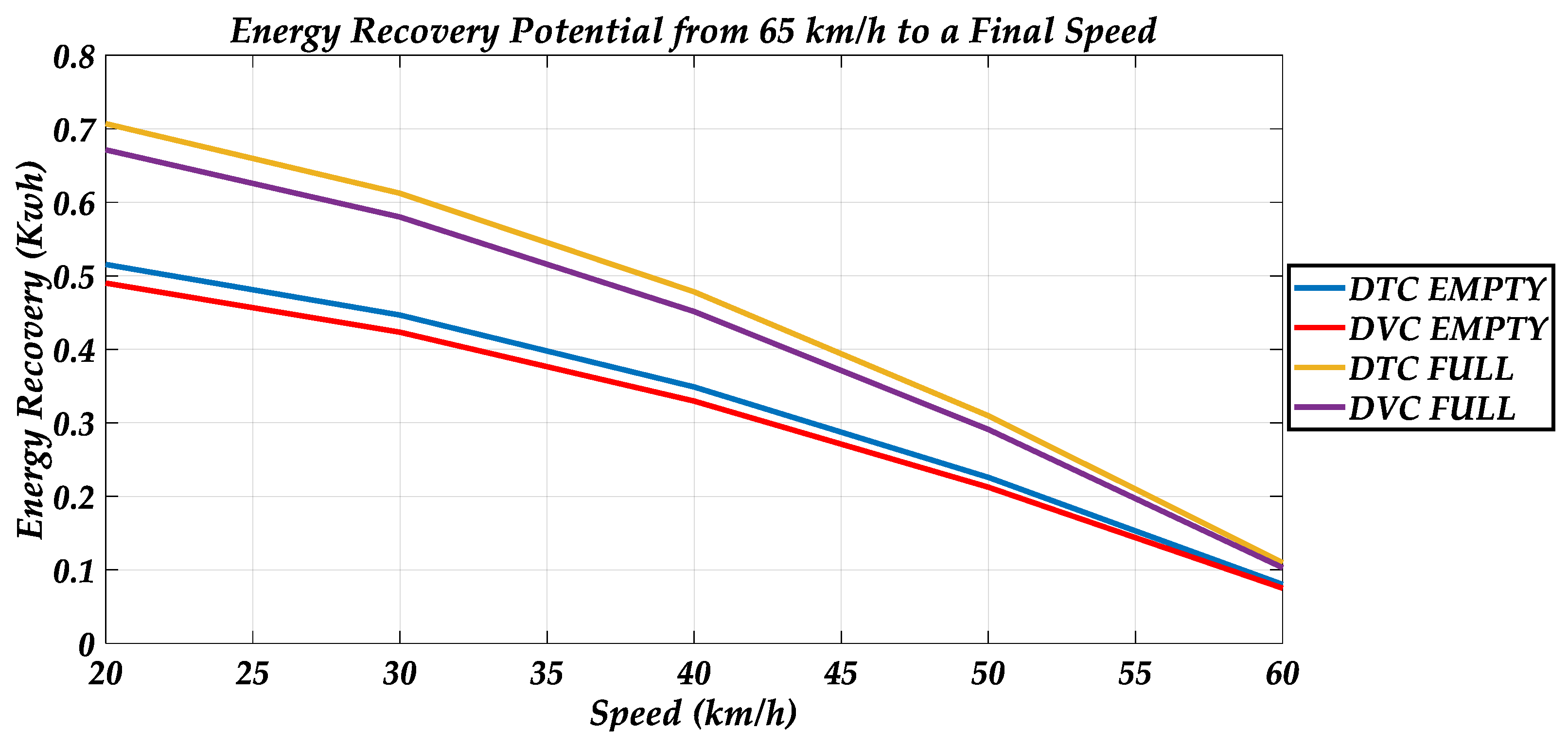
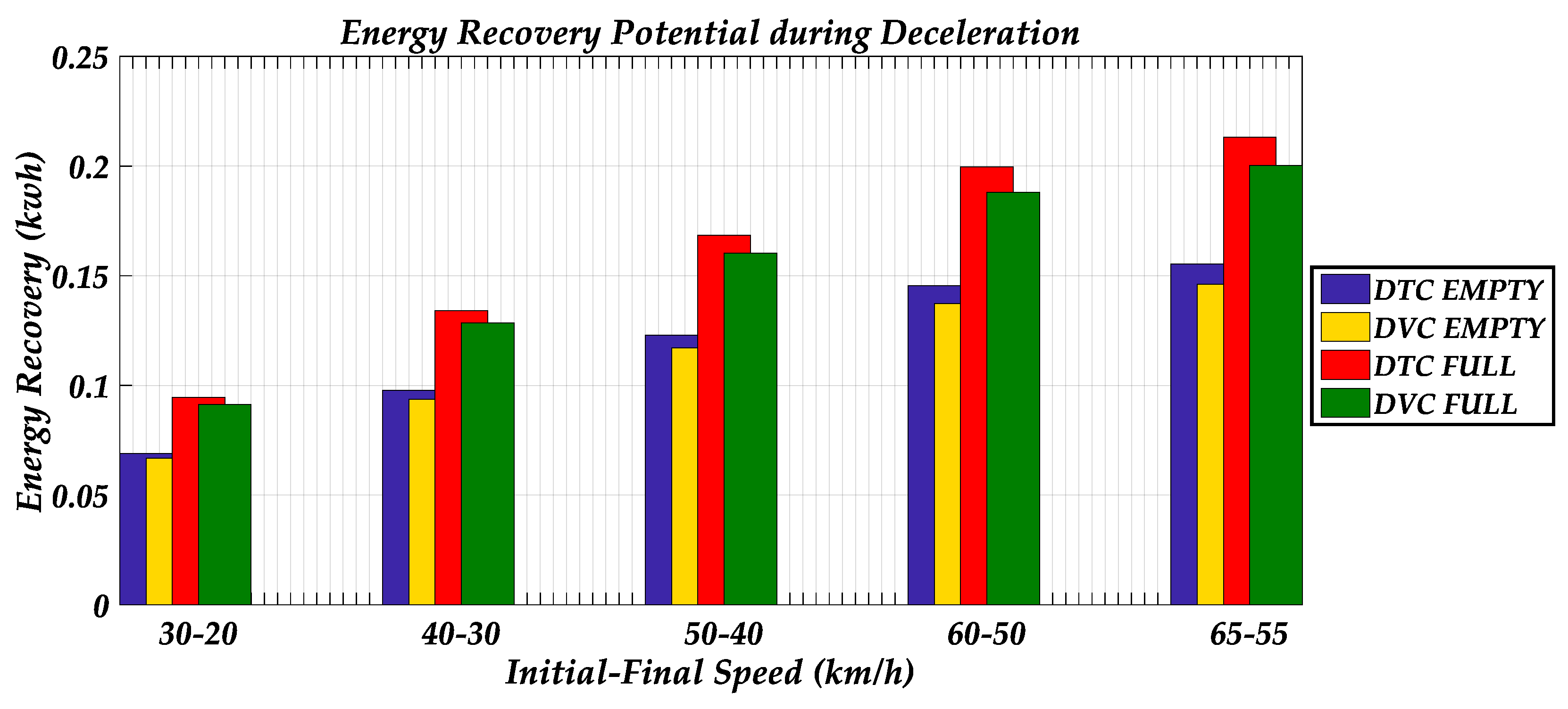
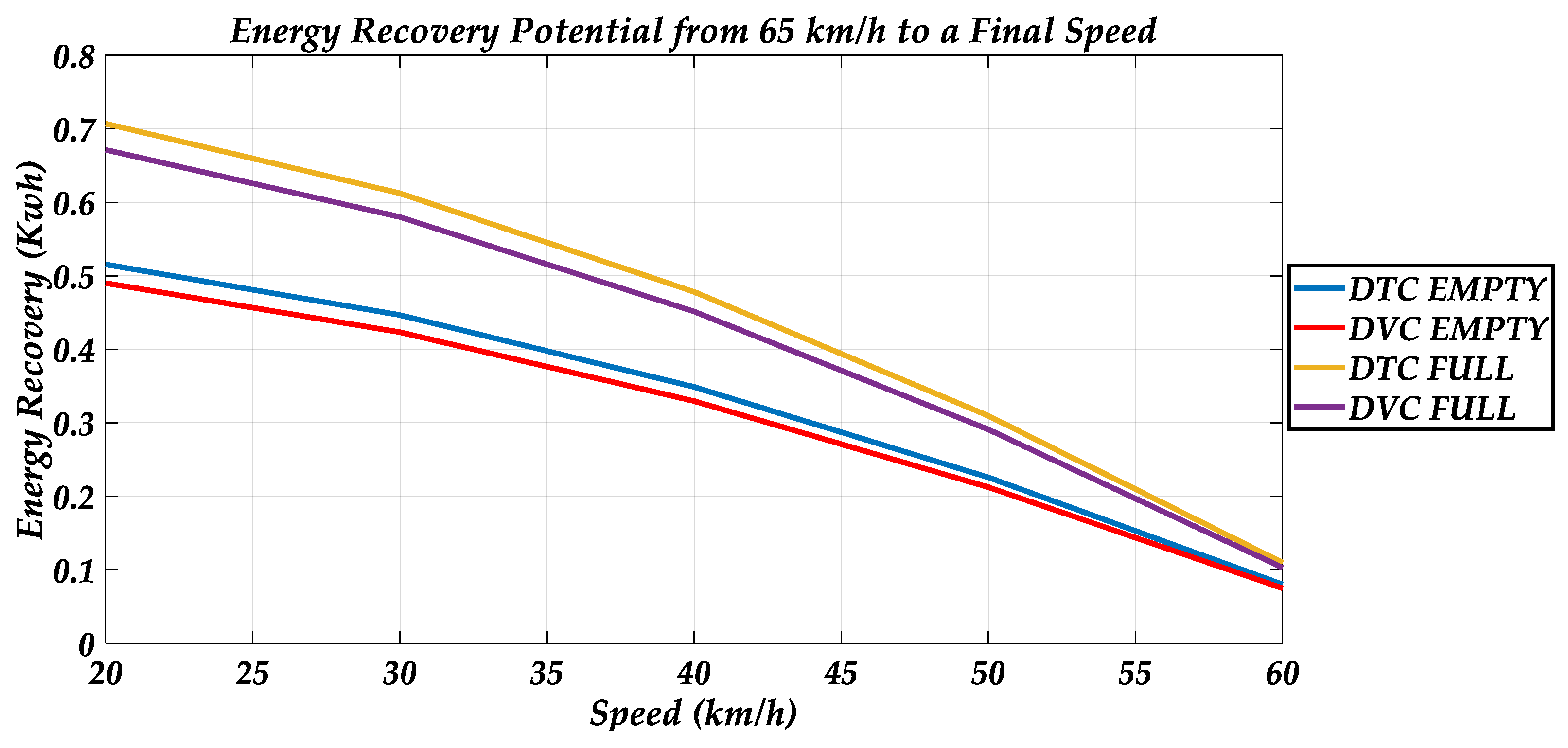
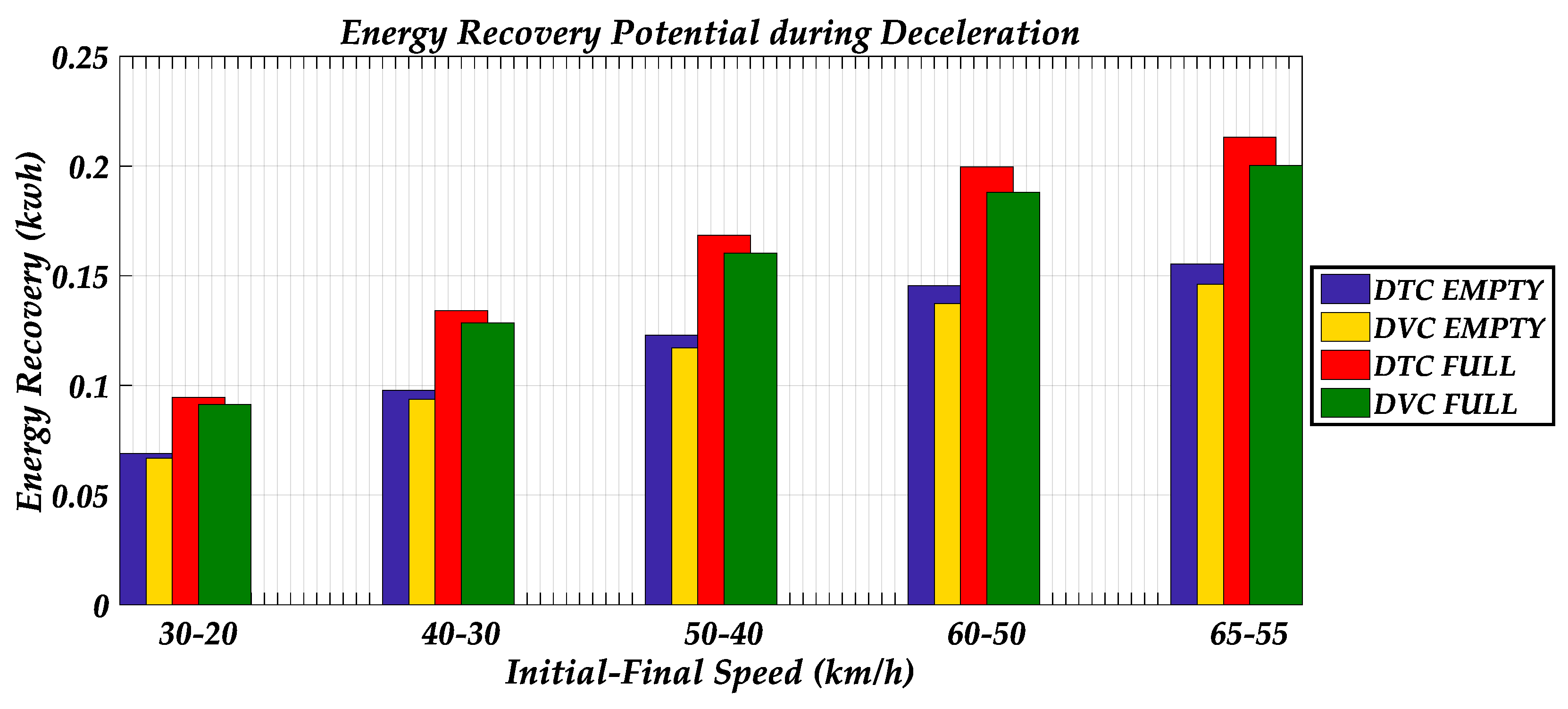
4.4. Energy Recovery Estimations—Deceleration
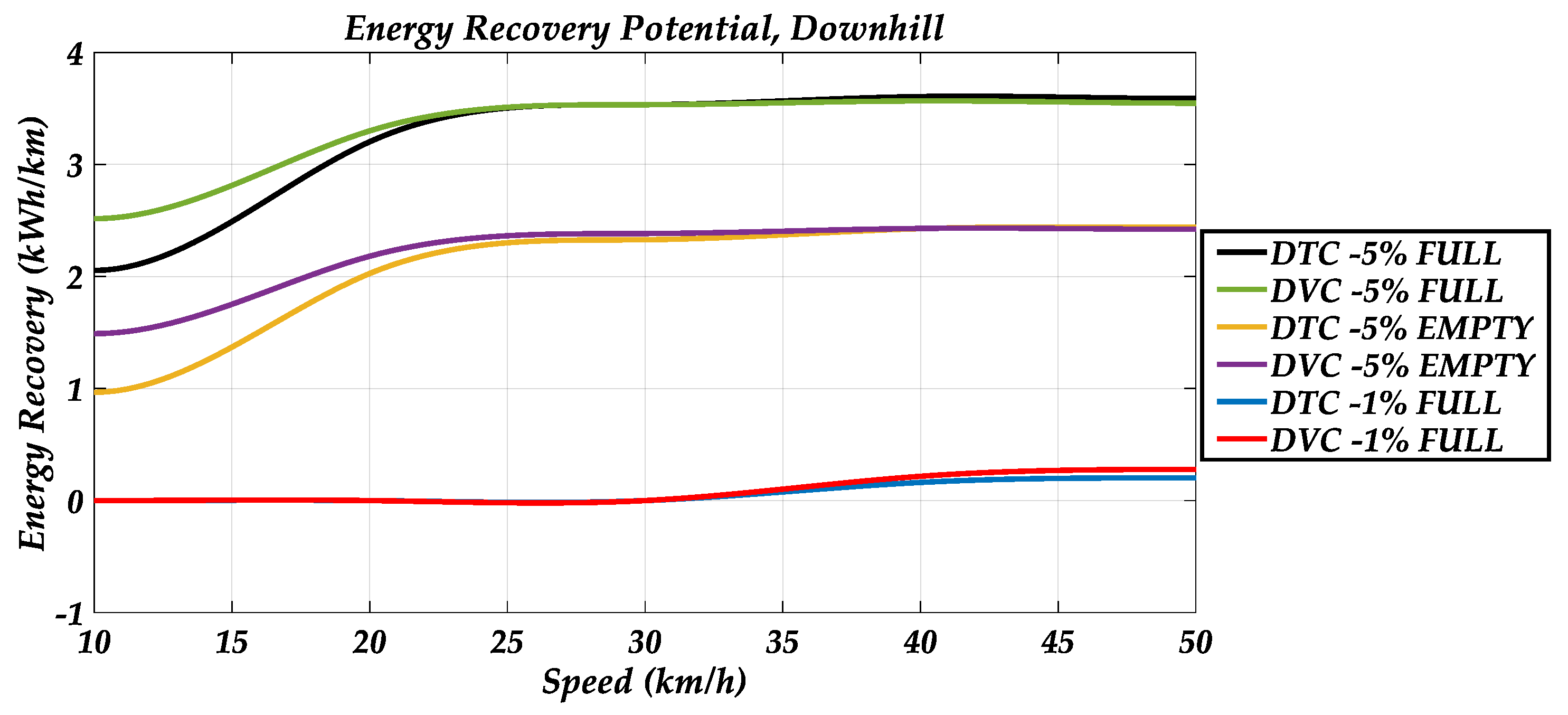
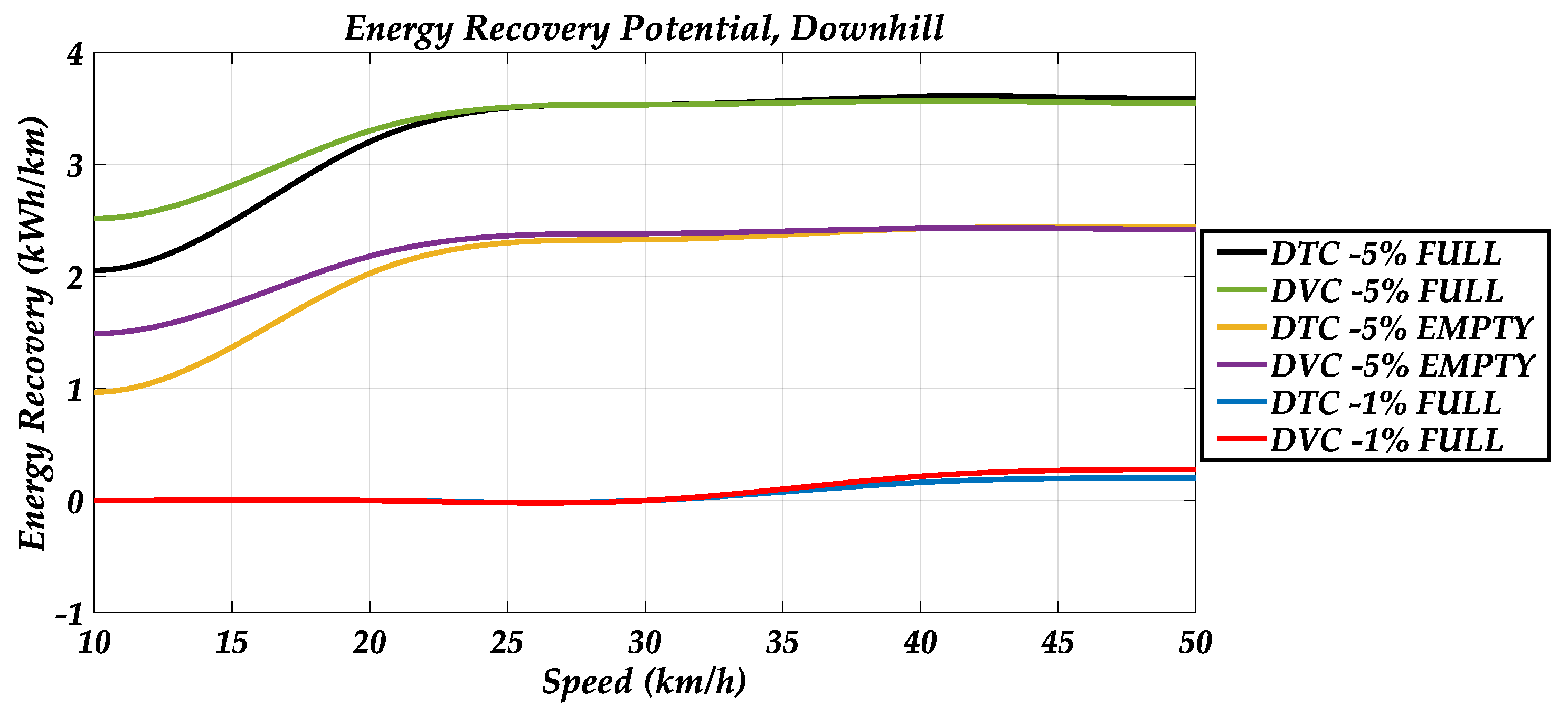
4.5. Energy Recovery Estimations—Downhill
4.6. Energy Consumption/Recovery Overall Conclusions
- In constant-speed courses, energy consumption is significantly increased by increasing road inclination, whereas the increase in the trolleybus passenger load, for the same road inclination, has limited effects. Also, the greater the downhill inclination, the greater the regenerated energy amount.
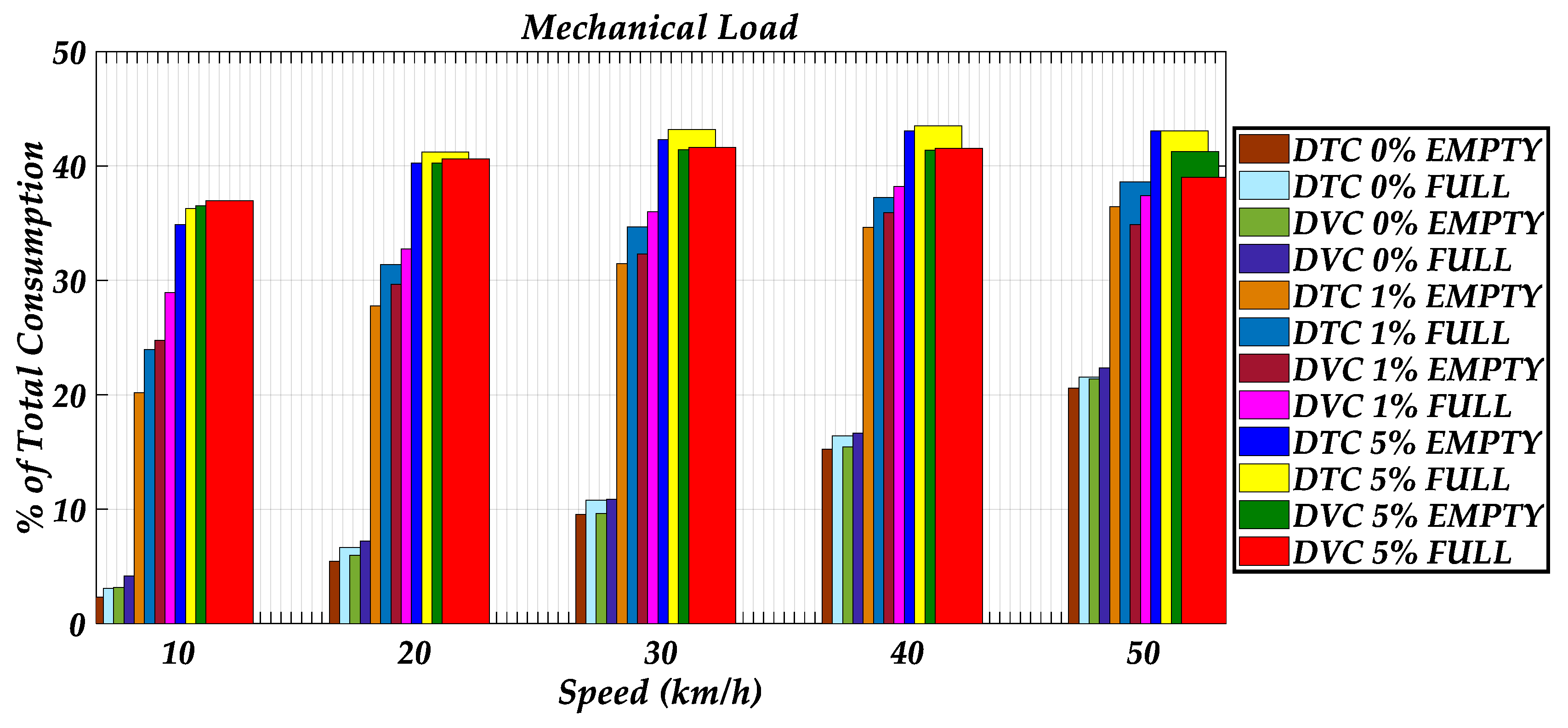
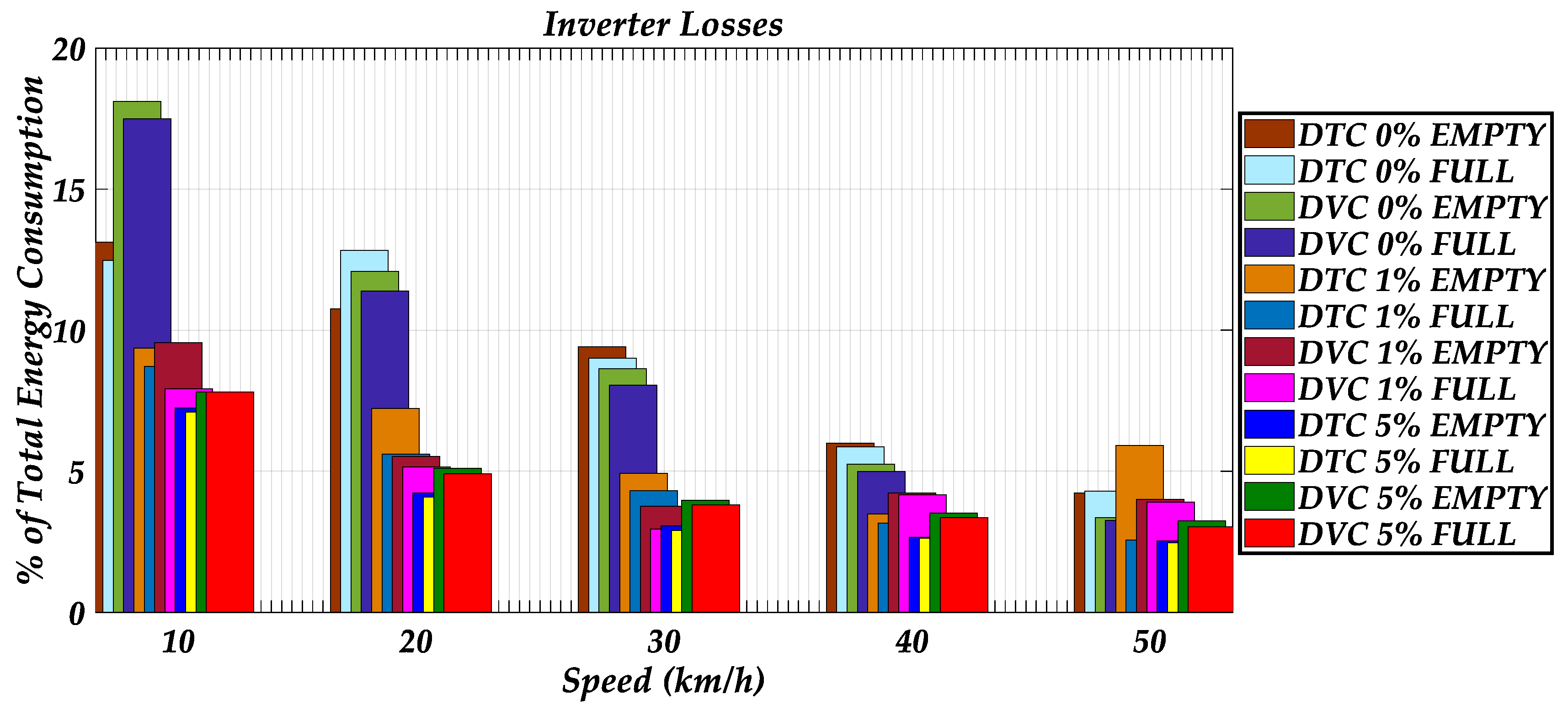
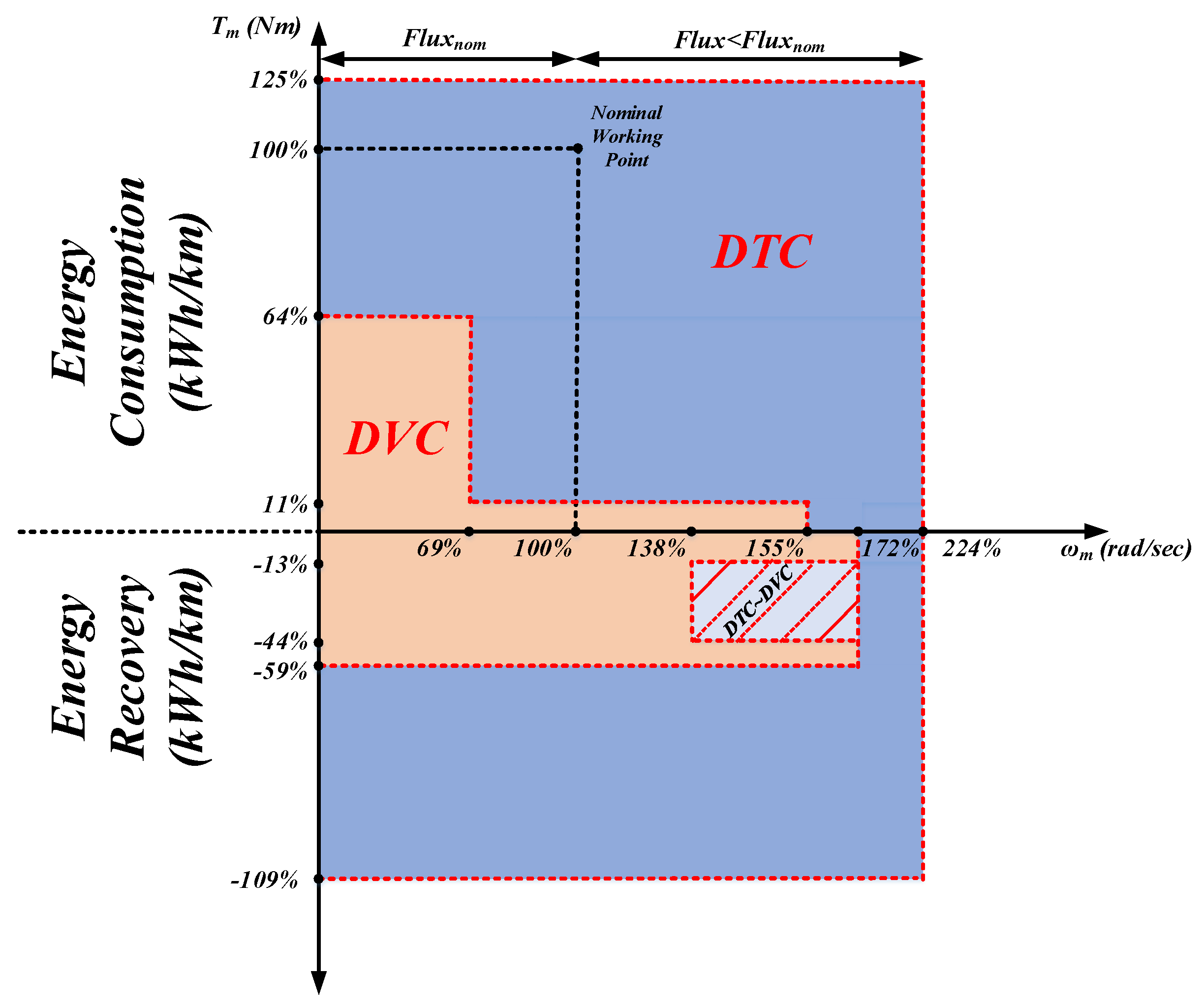
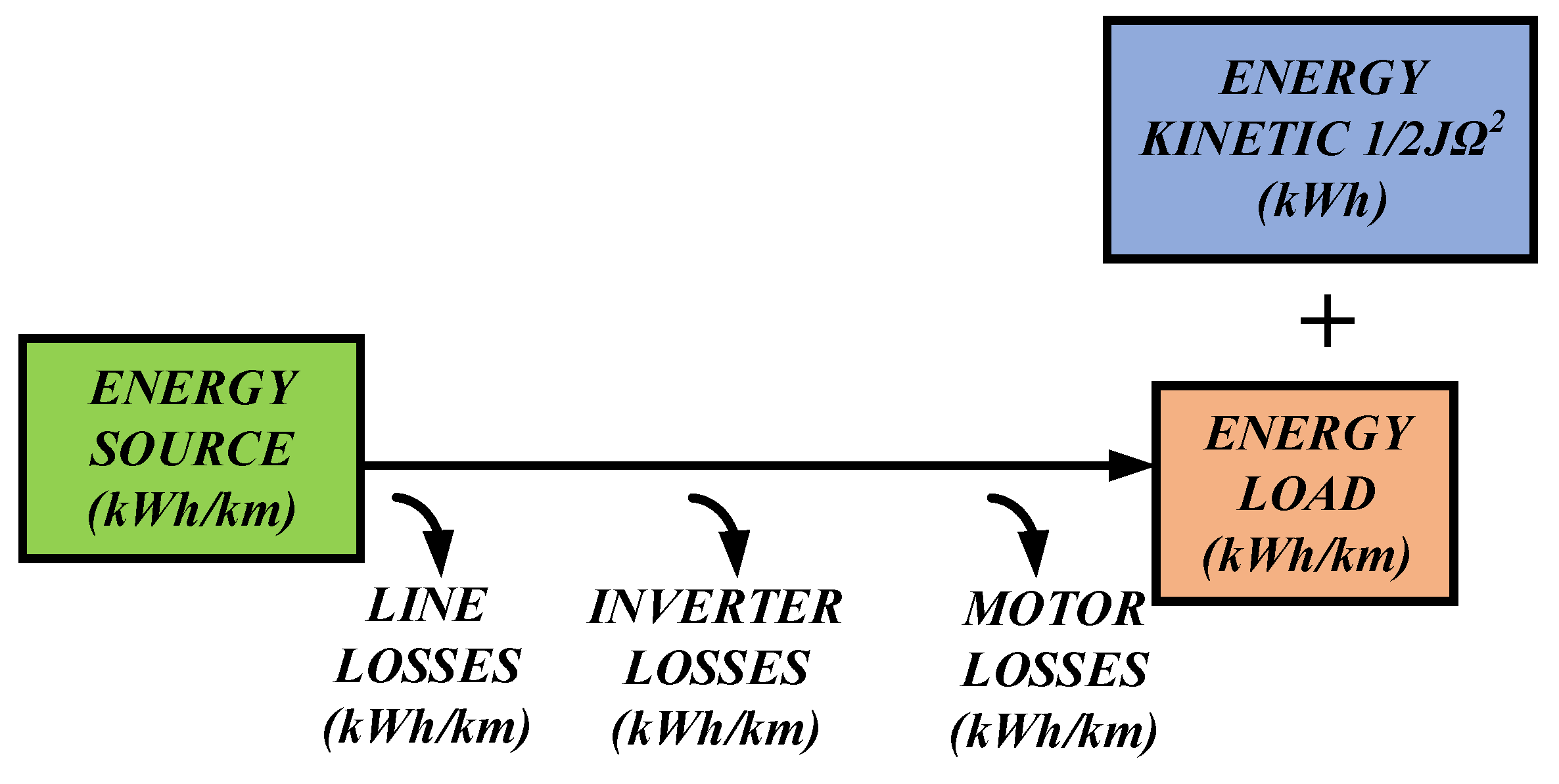
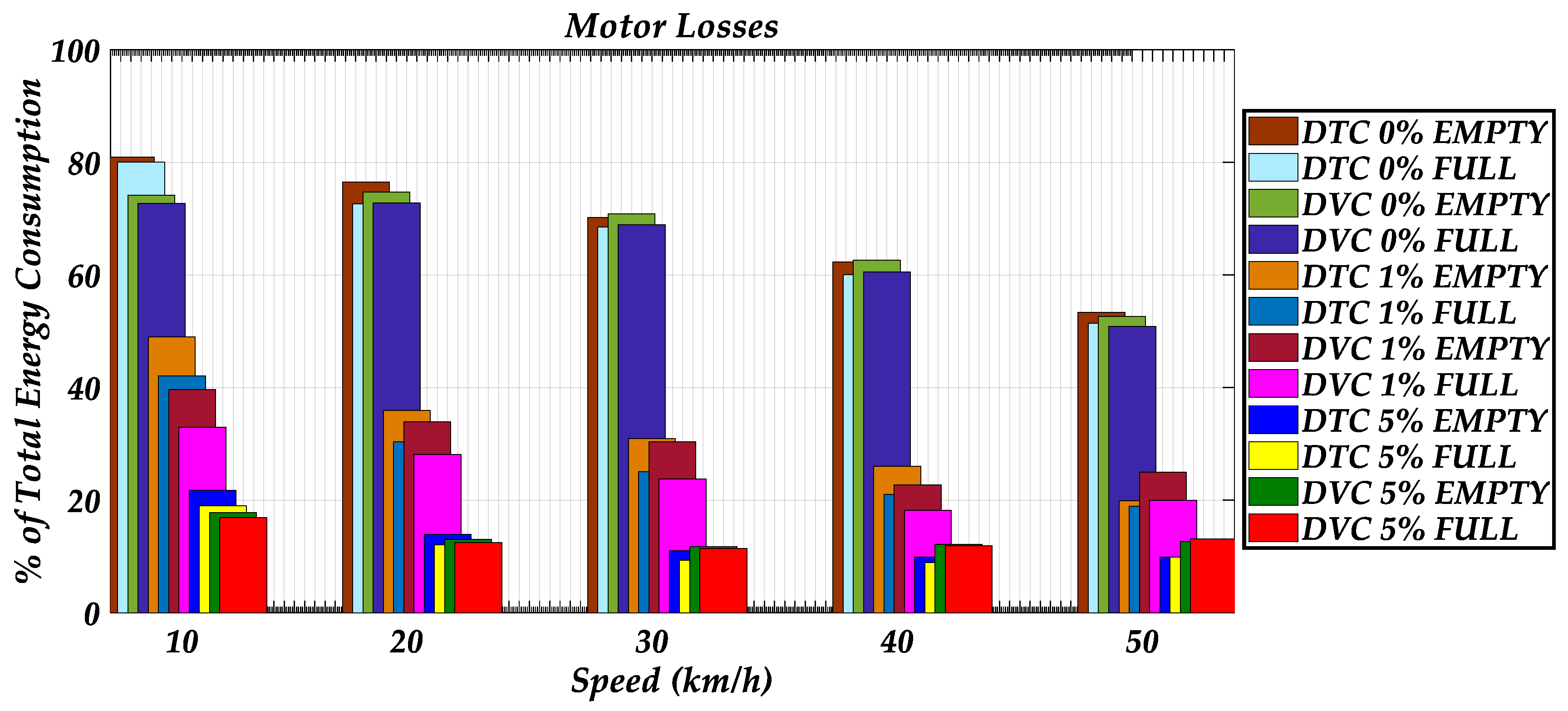
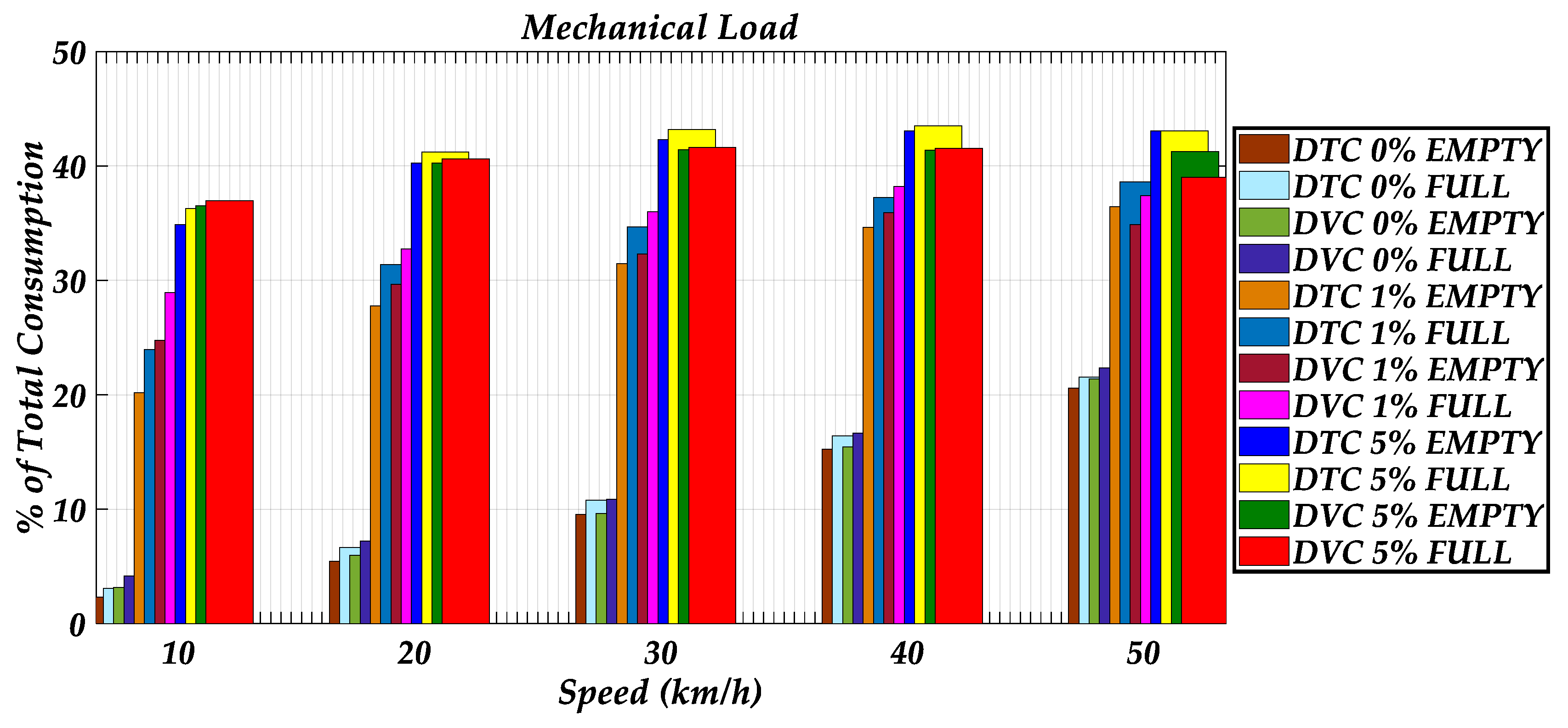
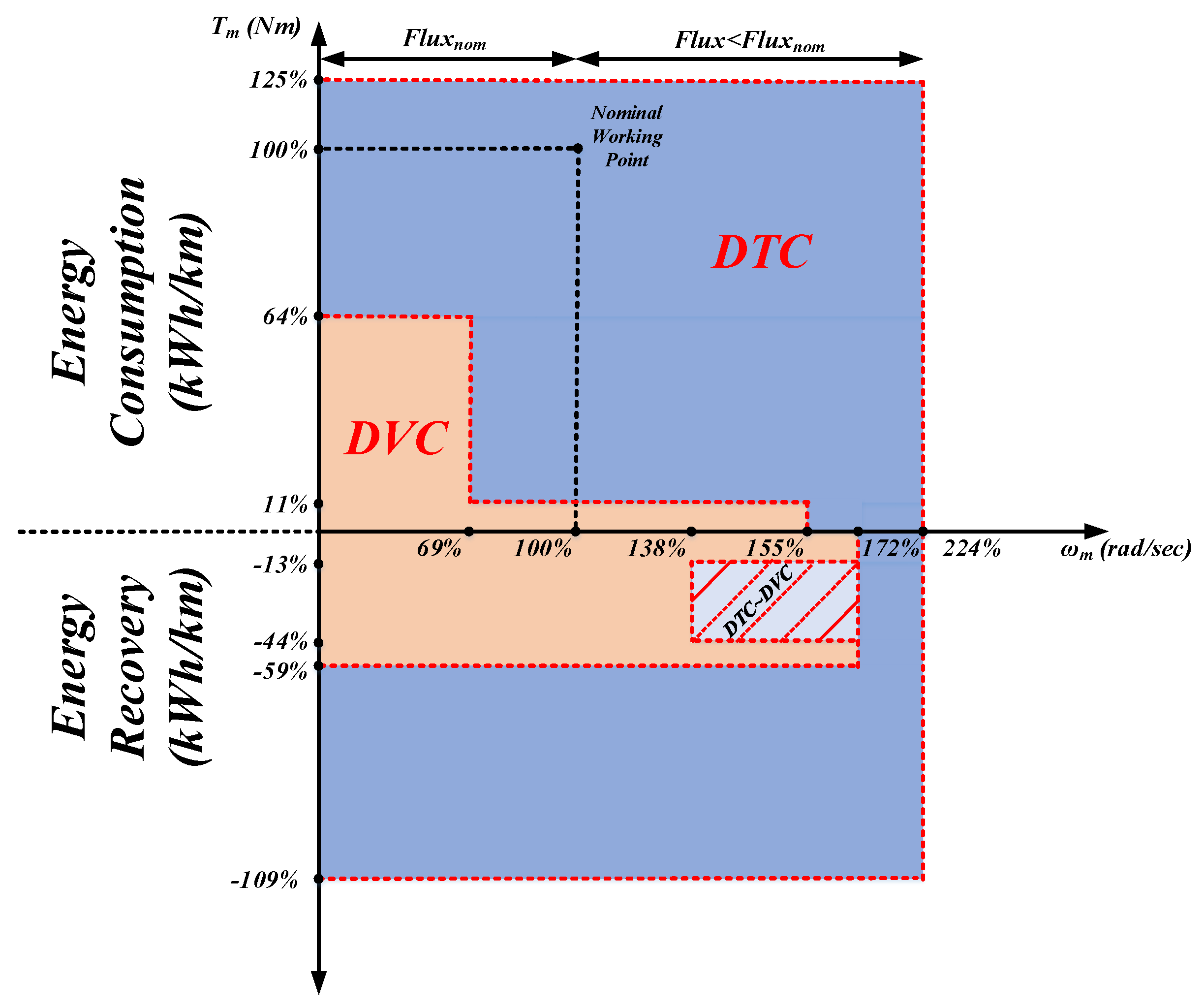
- Correspondingly, the energy consumption allocation (see Figure 7) is significantly influenced by road inclination, whereas the trolleybus passenger load has limited effects on it. Also, it appears that as speed increases and load torque approaches the machine nominal value (1355 Nm), the electrical losses of the machine become less relative to the mechanical ones. Therefore, the system performance is higher in this operating range.
- During constant speed courses, in the case of zero road inclination, the system mechanical load (for both empty and full trolleybus) ranges from about 10 Nm (0.66% of the nominal torque value) to 40 Nm (3% of the nominal load). These values are much lower than the machine nominal torque value (1355 Nm). In the case of 1% road inclination, the machine mechanical load ranges from about 130 Nm (9.6% of the nominal torque value) to 212 Nm (15.6% of the nominal torque value), whereas for 5% road inclination, the machine load ranges from about 619 Nm (45.62% of the nominal torque value) to 895 Nm (65.97% of the nominal torque value). This wide load torque deviation justifies the fact that DVC and DTC are more effective under different operating conditions.
- During deceleration at intermediate speeds, a greater amount of energy recovery is achieved in the area of higher initial speeds (i.e., 40, 50, 60 km/h), as a result of the higher kinetic energy of the electromechanical system.
- For constant-speed courses at low speeds (i.e., at 10 km/h), trolleybus consumption is greater than the energy consumption at higher speeds. This is due to the high electromagnetic flux and the small amplitude modulation ratio of the inverter.
- During accelerations with the maximum permitted rate—it corresponds to a torque equal to 125% of the machine nominal torque value—DTC seems to outperform DVC in terms of energy consumption (as it has been already discussed).
- Similarly, during decelerations with the maximum permitted rate—it corresponds to a braking torque equal to −109% of the machine nominal torque value—DTC seems to outperform DVC in terms of the brake energy recovery amount.
- Finally, it appears that there is a possibility of recovering a significant amount of energy both during decelerations of the trolleybus, as well as during its downhill courses. In the latter case, the energy recovery is higher than in the first one. However, the first case is more frequent on actual trolleybus runs.
5. Energy Consumption/Saving Potential Estimations for a Typical Trolley Course
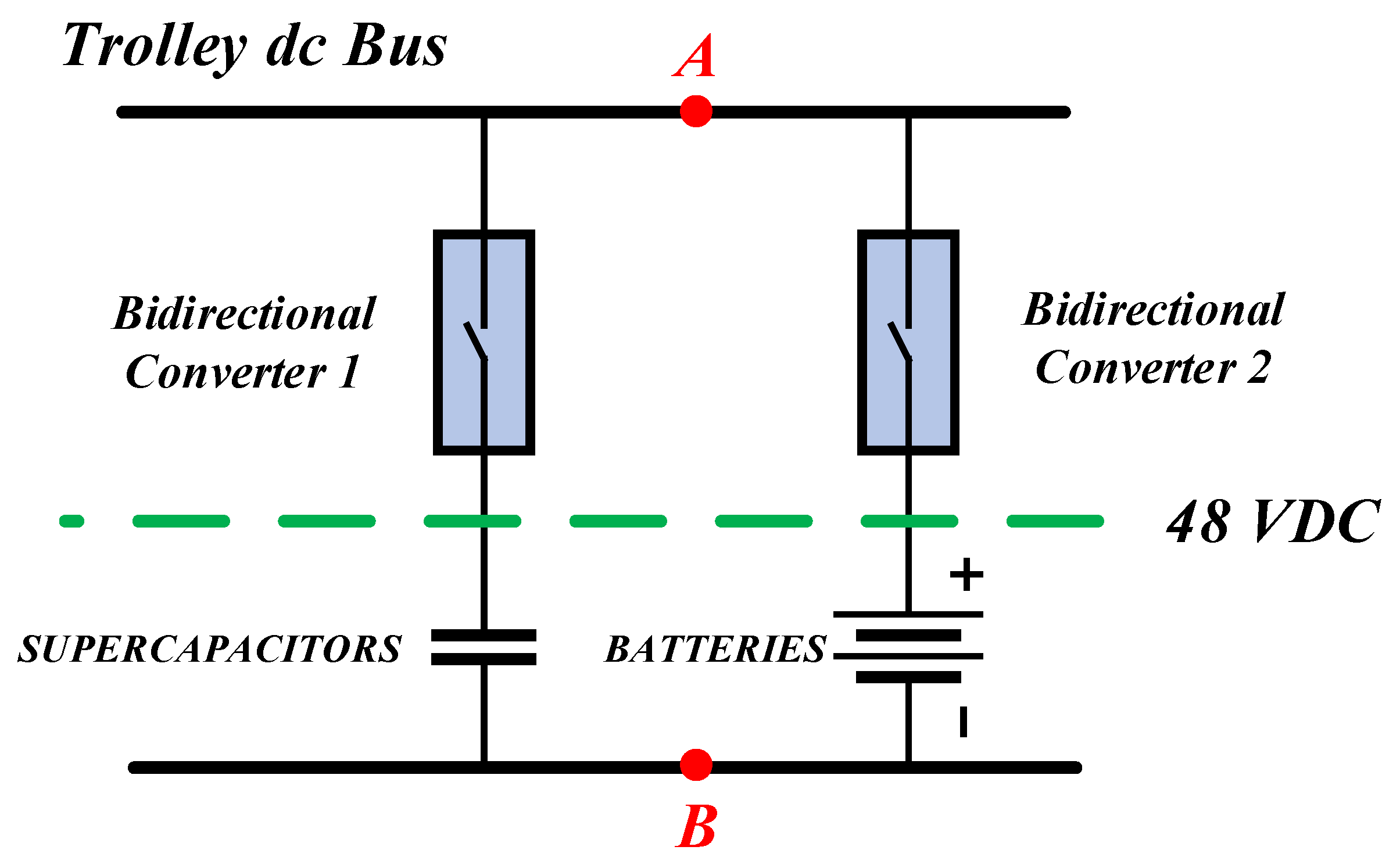
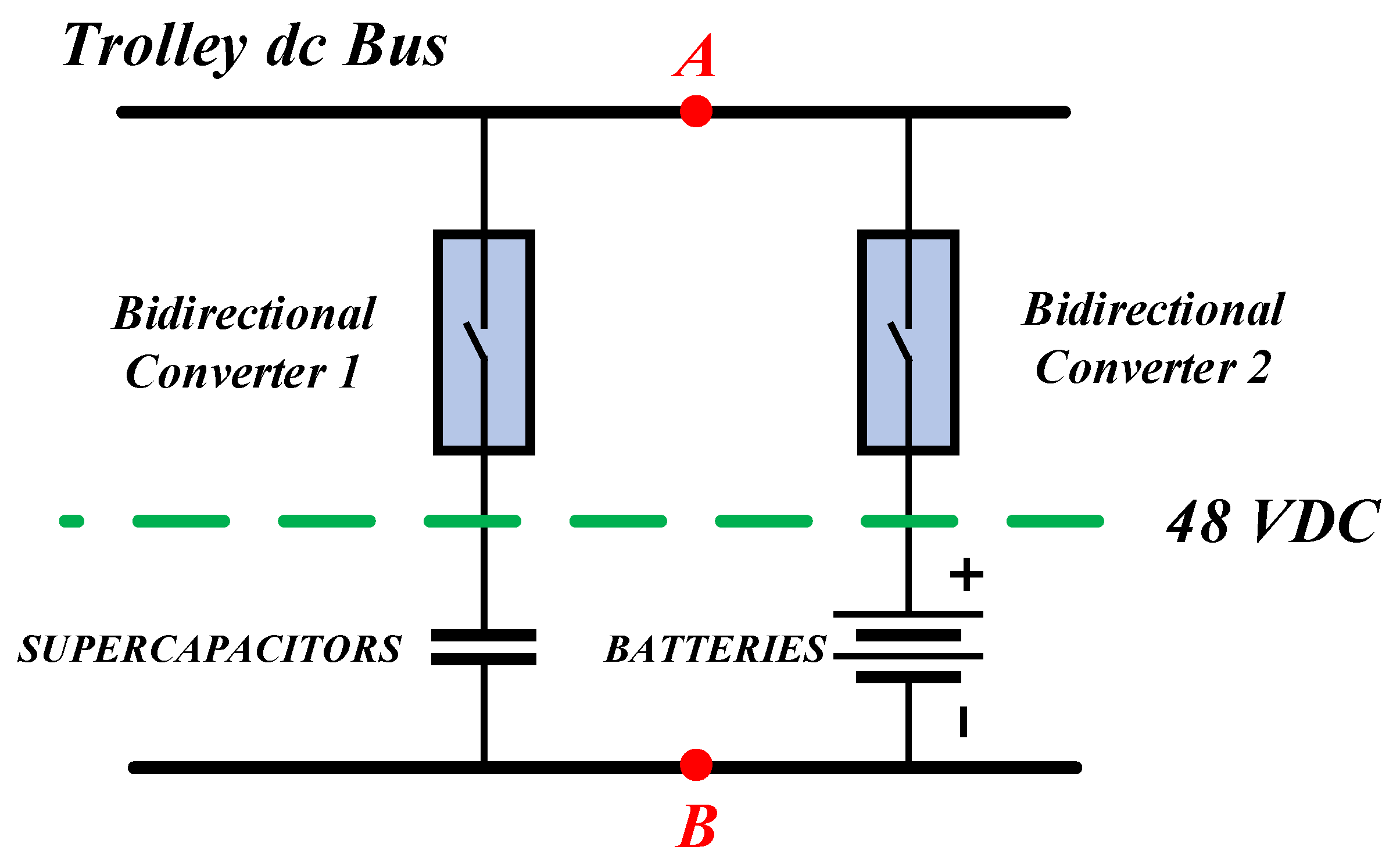
6. Proposed Hybrid Energy Storage Apparatus
- A supercapacitor bank of 0.2 kWh maximum storage capability, in order to support the energy recovery during deceleration intervals. This unit will also support acceleration intervals, in order to limit the power losses of the overhead supply network. Its dimensioning is based on the results of Figure 15 and Figure 16.
- A battery bank of 3.5 kWh maximum energy capability, in order to support the energy recovery during vehicle downhill courses. Its dimensioning is based on the results of Figure 17.
- Two bidirectional DC/DC converters, one for each energy storage bank.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Apostolidou, N.; Papanikolaou, N.; Kollias, E.; Kampourakis, P. Survey on Regenerative Energy Potential of Athens Trolleybuses. In Proceedings of the 20th International Symposium on Electrical Apparatus and Technologies (SIELA), Burgas, Bulgaria, 3–6 June 2018. [Google Scholar]
- Chen, Y.C.; Chang, Y.C.; Cheng, J.F.; Yu, W.C.; Lin, C.L. Regenerative Braking-Driving Control System. In Proceedings of the 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018. [Google Scholar]
- Neyestani, N.; Damavandi, M.Y.; Godina, R.; Catalão, J.P.S. Integrating the PEVs’ traffic pattern in parking lots and charging stations in micro multi-energy systems. In Proceedings of the 51st International Universities Power Engineering Conference (UPEC), Coimbra, Portugal, 6–9 September 2016. [Google Scholar]
- Yang, Y.; He, X.; Zhang, Y.; Qin, D. Regenerative Braking Compensatory Control Strategy Considering CVT Power Loss for Hybrid Electric Vehicles. Energies 2018, 11, 497. [Google Scholar] [CrossRef]
- Sarrafan, K.; Muttaqi, K.M.; Sutanto, D.; Town, G.E. A Real-Time Range Indicator for EVs Using Web-Based Environmental Data and Sensorless Estimation of Regenerative Braking Power. IEEE Trans. Veh. Technol. 2018, 67, 4743–4756. [Google Scholar] [CrossRef]
- Liu, B.; Li, L.; Wang, X.; Cheng, S. Hybrid Electric Vehicle Downshifting Strategy Based on Stochastic Dynamic Programming During Regenerative Braking Process. IEEE Trans. Veh. Technol. 2018, 67, 4716–4727. [Google Scholar] [CrossRef]
- Zhang, G.; Tian, Z.; Du, H.; Liu, Z. A Novel Hybrid DC Traction Power Supply System Integrating PV and Reversible Converters. Energies 2018, 11, 1661. [Google Scholar] [CrossRef]
- Bu, B.; Qin, G.; Li, L.; Li, G. An Energy Efficient Train Dispatch and Control Integrated Method in Urban Rail Transit. Energies 2018, 11, 1248. [Google Scholar] [CrossRef]
- Karatzaferis, I.; Tatakis, E.C.; Papanikolaou, N. Investigation of Energy Savings on Industrial Motor Drives Using Bidirectional Converters. IEEE Access 2017, 5, 17952–17961. [Google Scholar] [CrossRef]
- Allegre, A.-L.; Bouscayrol, A.; Delarue, P.; Barrade, P.; Chattot, E.; El-Fassi, S. Energy Storage System With Supercapacitor for an Innovative Subway. IEEE Trans. Ind. Electron. 2010, 12, 4001–4012. [Google Scholar] [CrossRef]
- Drabek, P.; Streit, L. The Energy Storage System with Supercapacitor for Public Transport. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC ‘09), Dearborn, MI, USA, 7–10 September 2009. [Google Scholar]
- Aberkane, H.; Sakri, D.; Rahem, D. Comparative Study of Different Variants of Direct Torque Control Applied to Induction Motor. In Proceedings of the 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018. [Google Scholar]
- Ganthia, B.P.; Rana, P.K.; Pattanai, S.A. Space Vector Pulse Width Modulation Fed Direct Torque Control of Induction Motor Drive Using Matlab-Simulink. In Proceedings of the 3rd International Conference on Electrical, Electronics, Engineering Trends, Communication, Optimization and Sciences (EEECOS), Tadepalligudem, India, 1–2 June 2016. [Google Scholar]
- Vas, P. Sensorless Vector and Direct Torque Control; Oxford University Press: Oxford, UK, 1998; pp. 263–323. [Google Scholar]
- Conte, M.; Genovese, A.; Ortenzi, F.; Vellucci, F. Hybrid battery-supercapacitor storage for an electric forklift: A life-cycle cost assessment. J. Appl. Electrochem. 2014, 44, 523–532. [Google Scholar] [CrossRef]
- Mitronikas, E.; Safakas, A. An Improved Sensorless Vector Control Method for an Induction Motor Drive. IEEE Tran. Ind. Electron. 2005, 52, 1660–1668. [Google Scholar] [CrossRef]
- Lascu, C.; Boldea, I.; Blaabjerg, F. A Modified Direct Torque Control for Induction Motor Sensorless Drive. IEEE Trans. Power Electron. 2000, 36, 122–130. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Gay, S.E.; Emadi, A. In Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2005; pp. 21–43, 99–110. ISBN 0-8493-3154-4. [Google Scholar]
- Fajri, P.; Ahmadi, R.; Ferdowsi, M. Equivalent Vehicle Rotational Inertia Used for Electric Vehicle Test Bench Dynamic Studies. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4115–4120. [Google Scholar]
- Xiaohua, Z.; Haitao, M.; Xing, X.; Qingnian, W. Parameter Design for Power Train and Performance Simulation of Electrical City Bus. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008. [Google Scholar]
- MAN Truck & Bus Company Website. Available online: www.mantruckandbus.com (accessed on 10 June 2018).
- Men, X.; Guo, Y.; Wu, G.; Shi, C.; Zhu, J. Implementation of a Motor Control System for Electric Bus based on DSP. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017. [Google Scholar]
- Karampasis, E.; Papanikolaou, N.; Voglitsis, D.; Loupis, M.; Psarras, A.; Boubaris, A.; Baros, D.; Dimitrakopoulos, G. Active Thermoelectric Cooling Solutions for Airspace Applications: The THERMICOOL Project. IEEE Access 2017, 5, 2288–2299. [Google Scholar] [CrossRef]
- Adib, A.; Dhaouadi, R. Modeling and analysis of a regenerative braking system with a battery-supercapacitor energy storage. In Proceedings of the 7th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Sharjah, United Arab Emirates, 4–6 April 2017. [Google Scholar]
- Liu, P.; Yang, L.; Gao, Z.; Huang, Y.; Li, S.; Gao, Y. Energy-Efficient Train Timetable Optimization in the Subway System with Energy Storage Devices. IEEE Trans. Intell. Transp. Sys. 2018, 1–17. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Mechanism analysis and evaluation methodology of regenerative braking contribution to energy efficiency improvement of electrified vehicles. Energy Convers. Manag. 2015, 92, 469–482. [Google Scholar] [CrossRef]
- Liu, W.; Xu, J.; Tang, J. Study on control strategy of urban rail train with on-board regenerative braking energy storage system. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics (IECON), Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Khodaparastan, M.; Mohamed, A. A study on super capacitor wayside connection for energy recuperation in electric rail systems. In Proceedings of the 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017. [Google Scholar]
- Yang, Z.; Yang, Z.; Xia, H.; Lin, F. Brake Voltage Following Control of Supercapacitor-Based Energy Storage Systems in Metro Considering Train Operation State. IEEE Trans. Ind. Electron. 2018, 65, 6751–6761. [Google Scholar] [CrossRef]
- Ostadi, A.; Kazerani, M. A Comparative Analysis of Optimal Sizing of Battery-Only, Ultracapacitor-Only, and Battery–Ultracapacitor Hybrid Energy Storage Systems for a City Bus. IEEE Trans. Veh. Technol. 2015, 64, 4449–4460. [Google Scholar] [CrossRef]
- Mouser Electronics. Available online: www.mouser.com (accessed on 10 June 2018).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Data of 8000-Series Athens Trolleybuses | |
|---|---|
| ig | 11.02 |
| Mv | 20,000 kg (max), 14,000 kg (min) |
| Af | 7.5 m2 |
| rw | 0.54 cm |
| Je,drive | 60 kg·m2 |
| Maximum linear velocity | 65 km/h |
| Maximum acceleration | 1.5 m/s2 |
| Maximum deceleration | 1.3 m/s2 |
| Type of Course | Initial/Final Speed (km/h) | Road Inclination (%)/Scenario 1/2/3 | Distance (km) | Times of Traveled Distance (Light/Heavy Traffic) |
|---|---|---|---|---|
| Acceleration | 0/20 0/30 0/40 0/50 20/30 30/40 40/50 | 0/0/0 | ignored | 20/60 40/120 20/60 20/60 20/60 40/120 20/60 |
| Deceleration | 30/20 40/30 50/40 | 0/0/0 | ignored | 20/60 40/120 20/60 |
| Constant Speed | 20, 30, 40, 50 | 0/0/0 | 0.5 | 1 |
| 20, 30, 40 | 1, 5, −1, −5/0, 1, −1, 0/0, 0, 0, 0 | 0.1 | 10 |
| Control Method/Traffic Case | Energy Consumption (kWh/km)/Recovery Potential (%) | ||
|---|---|---|---|
| Scenario 1 | Scenario 2 | Scenario 3 | |
| DVC, Light Traffic | 2.01/8.5 | 1.01/9.45 | 0.69/14.3 |
| DVC, Heavy Traffic | 2.74/13.46 | 1.8/15.55 | 1.42/20.9 |
| DTC, Light Traffic | 1.97/8.8 | 1.1/9.6 | 0.67/18.9 |
| DTC, Heavy Traffic | 2.69/14.2 | 1.82/17.22 | 1.39/24 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Apostolidou, N.; Papanikolaou, N. Energy Saving Estimation of Athens Trolleybuses Considering Regenerative Braking and Improved Control Scheme. Resources 2018, 7, 43. https://doi.org/10.3390/resources7030043
Apostolidou N, Papanikolaou N. Energy Saving Estimation of Athens Trolleybuses Considering Regenerative Braking and Improved Control Scheme. Resources. 2018; 7(3):43. https://doi.org/10.3390/resources7030043
Chicago/Turabian StyleApostolidou, Nena, and Nick Papanikolaou. 2018. "Energy Saving Estimation of Athens Trolleybuses Considering Regenerative Braking and Improved Control Scheme" Resources 7, no. 3: 43. https://doi.org/10.3390/resources7030043
APA StyleApostolidou, N., & Papanikolaou, N. (2018). Energy Saving Estimation of Athens Trolleybuses Considering Regenerative Braking and Improved Control Scheme. Resources, 7(3), 43. https://doi.org/10.3390/resources7030043