1. Introduction
The growing number of mining enterprises has led to an increase in air and water pollution, the formation of sinkholes on the Earth’s surface [
1], a change in the stress–strain condition of rock mass [
2], a violation of the waterproof strata [
3], the accumulation of explosive gases (methane) and subsequent ignition in the stopes [
4]; liquid and solid waste is stored on the Earth’s surface [
5], and the resulting vapors and gases are released into the atmosphere [
6]. All this leads to an increase in the man-made impact on the environment [
7]. Methane explosions in stopes, roof collapses and rock bumps are often accompanied by man-made earthquakes [
3]. Mining operations and man-made disasters cause vibrations in the Earth’s crust [
3,
8,
9]. Vibrations spread over long distances and have an impact on underground mine stopes and the buildings and structures located on the surface [
10]. Methods of controlling and reducing vibrations are considered in [
11,
12].
It is necessary to search for various technical methods [
13] and financial and economic tools in order to mitigate or completely eliminate the consequences of the impact of geotechnology on the environment [
14]. The main task facing geotechnology is the creation of efficient engineering [
15], and economically [
16] and environmentally [
17] feasible technological solutions for deposit development [
18] with safe mining operations [
19].
When developing deposits, it is necessary to use a comprehensive method that considers the total value of the natural and man-made resources [
20,
21,
22] of the developed area. The technologies used must protect people, both in production [
23] and in their habitat [
24].
It is often proposed to preserve the pristine nature and mineral diversity of the Earth by transferring mining production to space bodies [
25]. However, the lack of technical possibilities and unresolved legal problems [
26,
27] postpone the implementation of this idea to the distant future.
The choice of rational geotechnology involves the following:
- -
The application of the principles of safe production organization [
28];
- -
The elimination of waste generation or its disposal [
29];
- -
The use of intermediate products (industrial waste) in a closed production cycle [
30].
The introduction of rational geotechnology will allow the following:
- -
The increasing economic and environmental requirements [
31] for mining enterprises to be met;
- -
Safe mining production with an integrated preventive environmental strategy to be organized [
32].
The application of technology with backfill based on mining waste leads to the following:
- -
An increase in the efficiency of deposit development;
- -
A decrease in the negative impact of geotechnology on the environment;
- -
A decrease in the harmful impact on humans [
33];
- -
An increase in the extraction ratio of minerals [
34].
The strength of the fill mass depends on the quality of the binder and aggregate, the quantitative ratio between them and the liquid. If processing tailings are used in the backfill material, they need to be pre-dewatered and dried. The issues of drying mineral waste were previously considered in [
35]. The quality of the binder and aggregate grinding has a positive effect on the created artificial mass. Therefore, it is necessary to improve the methods for evaluating grinding mechanisms [
36]. A high abrasibility of the aggregate leads to an increase in the wear of parts and mechanisms. It is necessary to ensure the preservation of the operational resource of grinding mechanisms and the transport system through the use of new manufacturing technologies and wear diagnostics [
37].
An analysis of the current state of mineral extraction shows continuous growth, both in terms of the number of new enterprises and the scale of existing industrial facilities. First of all, this is due to the development of new and advanced mining technologies, as well as tools that make it possible to work in previously inaccessible regions with harsh climatic conditions in order to extract minerals from greater depths and with a lower percentage of the useful component. The development of such deposits leads to the emergence of technogenic manifestations, which are very different in form and dynamics from those previously encountered [
38,
39]. This requires a more rigorous approach to ensure safe mining [
40]. The development and implementation of various solutions in the field of automated control systems, including robotic and fully autonomous mining transport complexes, make it possible to ensure the continuous execution of production processes in changing conditions [
41]. The consequence of such technical solutions is a significant increase in the load on the undermined rock mass [
42], which predetermines the need for innovative technologies that allow for the changes in the stress–strain state of the rock mass to be predicted [
43].
Today, many scientific works are devoted to the problem of selecting a rational technology for the mining of a deposit [
44,
45,
46]. Innovative technologies are being developed, and new methods for a rapid assessment of the rock mass state [
47,
48] using remote sensing [
49,
50,
51,
52] are being introduced. Most solutions in this area involve the study of spot measurements of stress in the mass, performed by specialists in the field or with stationary monitoring sensors in automatic mode [
53]. It is obvious that such an approach is not perfect in view of the limited amount of data, which poorly allow for an assessment of the general stress state of the rock mass and for a visual interpretation of the dynamics of changes in this state, including in the operational mode. If these data in the mining industry were previously sufficient to assess the reliability of a short-term forecast, then, in the context of constantly changing conditions and factors, it is necessary to develop a methodology taking into account a large amount of data and the transience of their changes.
As a consequence, rock mass still remains subject to various abrupt changes, with control being largely left to the mining companies themselves. Thus, the management of enterprises, aimed most of all at increasing profits through the intensification of works, has to find a balance between the growth of production rates and the prospect of dynamic manifestations in the undermined mass. Dynamic manifestations can be divided into local and large-scale. If local dynamic manifestations lead to a temporary stoppage of mineral extraction, then large-scale ones often cause technogenic disasters and the cessation of mine exploitation. At present, the developed analytical models that are used in the mining industry [
2,
7,
41,
42,
47,
48] cannot fully control or predict the stress–strain state of the mass. The lack of a simple, visual and easily interpretable tool for assessing the stress dynamics in the mass under the conditions of intensified works significantly complicates the decision-making processes of company management and certainly leads to risks of technogenic catastrophes.
In view of the above, the purpose of this work is to improve the reliability and efficiency of the monitoring of the stress–strain state of undermined mass and to create an algorithm for determining the optimal structure and composition of stowing mixture in the development of deposits with systems of artificial support.
2. Formalization of the Task for Monitoring the Stress–Strain State of Rock Mass
Producing a description of the cause-and-effect relations of the dynamics of changes in the stress–strain state of rock mass is a very time-consuming and complex task. The emphasis in this work is one of the most important aspects—stress–strain state control in rock mass with the application of backfill technology. The proposed model for assessing the stress–strain state of rock mass is based on the interrelation of three key elements:
- -
The degree of impact on the mass;
- -
The exposure time and parameters of the mined stopes;
- -
The applied development system for an integrated assessment of the rock mass state.
The severity of the impact on the mass is determined as a quantitative assessment of the mineral extraction work performed in the modal time tact. Thus, the undermined rock mass is presented as a geoinformation multi-agent system, which reproduces the dynamics of the stress–strain state in accordance with the intensity of the mining operations. Mineral extraction leads to the formation of large voids, and this causes an intense redistribution of the stress–strain behavior of the mass. Such changes predetermine rock disturbances characterized by a variety of intensities, shapes and sizes [
2,
3]. Their influence decreases depending on the distance from the mining area [
10,
12,
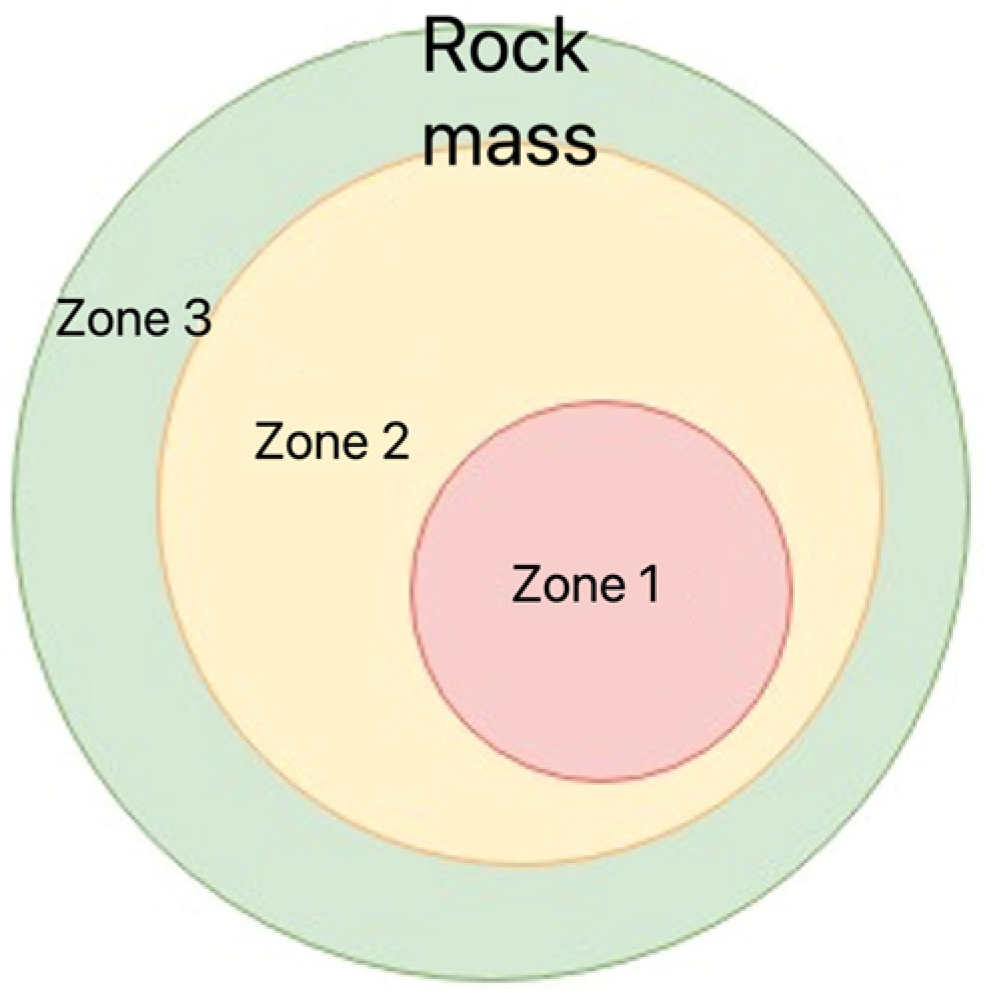
54]. Therefore, it may be concluded that rock mass is characterized by zonal disintegration around the area of the underground mining [
3,
54]. The zonal division of the mass, depending on the intensity of the underground mining impact, is a set of alternating disturbed and relatively undisturbed zones.
The whole geoinformation multi-agent system has such parameters as the total volume of the investigated mass, and the massif of coordinates that describe single areas (points) of this volume and the location of influence zones (stopes, workings, etc.). For each coordinate point, a parameter for estimating the stress–strain state at a point in time is introduced in the form of a relative stress concentration in the mass.
Furthermore, the geoinformation system is presented in the form of Moore space as a multi-agent interaction environment. The agents of the system are single sections of the mass volume (with a scale of 1 km3 in experimental modeling), and they interact with each other through the transfer of stresses and strains in the mass.
Based on the initial massif of coordinates, the structure (location) of the initial population of agents in space is determined, which is a conditionally static part of the system.
Zone division of the mass is proposed to determine the initial structure of the multi-agent system (
Figure 1): zone 1—mining area (mined-out stope); zone 2—rock mass, located in the vicinity of the mined-out stope; and zone 3—rock mass, located at a distance from the mining area.
The entire geoinformation multi-agent system has such parameters as the total occupied area, an array of coordinates corresponding to each point of this area and the number of stopes. For each individual coordinate point, it is possible to set a parameter for estimating the stress–strain state at the time, which is defined as a relative change in the initial density or a relative displacement of strata. For rock mass, which is already defined as “disturbed”, it is possible to identify the disturbed area and its coordinates. In this case, the geoinformation system can be easily fitted into the Murov space, which is a multi-agent interaction environment. The zones of influence of extraction operations on the rock mass state will indicate its separate single areas, which interact with each other by transferring the stress–strain state indicators.
According to the initial coordinates and initial values, it is possible to determine the point of fracture initiation, i.e., the point of mass transition from the equilibrium state to the stress-strained state. The dynamics of the transition of the system from the equilibrium state are characterized by the evaluation of the stresses in the mass: “stable”, “subject to fracture” and “fractured”. In the entire volume of the rock mass, of great importance is the value of the stress, which is reproduced in each tact of the modal time and extends to the neighboring areas.
3. Construction of a Simulation Model
In the proposed conditions for the intensification of mining works, it is reasonable to choose t-year as the unit of model time, which determines both the properties of the technological processes themselves and the possibility of operational long-term forecasting. The number of agents (of a separate volume/section of the mass)
in the initial population is determined in accordance with the studied volume of the massif
, where
is the population of agents in Equation (1):
Based on the number
and the occupied volumes
of the mined-out space, the number of agents affecting the massif
can be determined using Equation (2):
It is worth noting that and can be set as both static parameters and dynamic parameters in order to study the impact on the region due to an increase or decrease in the scale of production.
In the proposed simplified model, agents are in a two-dimensional discrete space, which is a massif of cells (grouped x, y coordinates). Neighboring agents are determined according to the Moore model.
In the formula below,
is the number of blocks that are in the actual mining per modal time unit, and
is the average value of the fractures formed in the weakened mass during the mining of one block. Since the mining processes are not stationary within the experiment,
is randomly set to an interval from 0 to 6, with an average value of 2. The parameter
is defined as the total volume of fractures from one block and varies randomly per modal time unit. The volume of the fractures formed because of the mass weakening during the actual mining
per modal time unit
can be determined using Equation (3):
Since dynamic stresses are generated in the mass due to blasting, it is necessary to consider the volume of the fractures formed during these works in the model.
The volume of the fractures produced by blasting during mining per modal time unit is set in a similar way in Equation (4):
where:
It should be noted that the number of simultaneous explosions is the target tunable parameter under intensification conditions. However, in experimental modeling, this parameter is randomly set between 0 and 5000, which may be due to production volumes that are related to market prices, market demands, operations under difficult conditions and other technological conditions.
Thus, the values of
and
are set as random variables using a triangular probability distribution function. An estimation of the increase in the harmful substance volume per modal time unit produced by one mining enterprise can be made using Equation (5):
However, for each individual agent influencer, the increase in the volume of cracks can be determined using Equation (6):
For a more accurate calculation, the subvertical fracture development factor, which has an influence on the total fracture volume, has to be additionally included in the general model. However, in the experimental modeling, the calculation is carried out for the most favorable conditions (the ideal model was applied); i.e., the influence of subvertical fracturing is excluded. At the same time, a correction factor
equal to 0.2 is considered to explain the weakening of the already weakened (fractured) mass. The coefficient can be set depending on the strength of the rock mass, its disturbance or other geological factors. To describe the state transfer process between the agents, the actual distance of each agent from the agent influencers is used, which is defined by a weighted sum of coordinate differences using Equation (7):
An estimation of the stability of each agent (individually taken volume of the massif) can be made using Equation (8):
At the same time, the following categorical assessments are introduced:
An integral assessment of the mass stability is determined through the weighted sum of the states of each section of the mass (agent) using Equation (9):
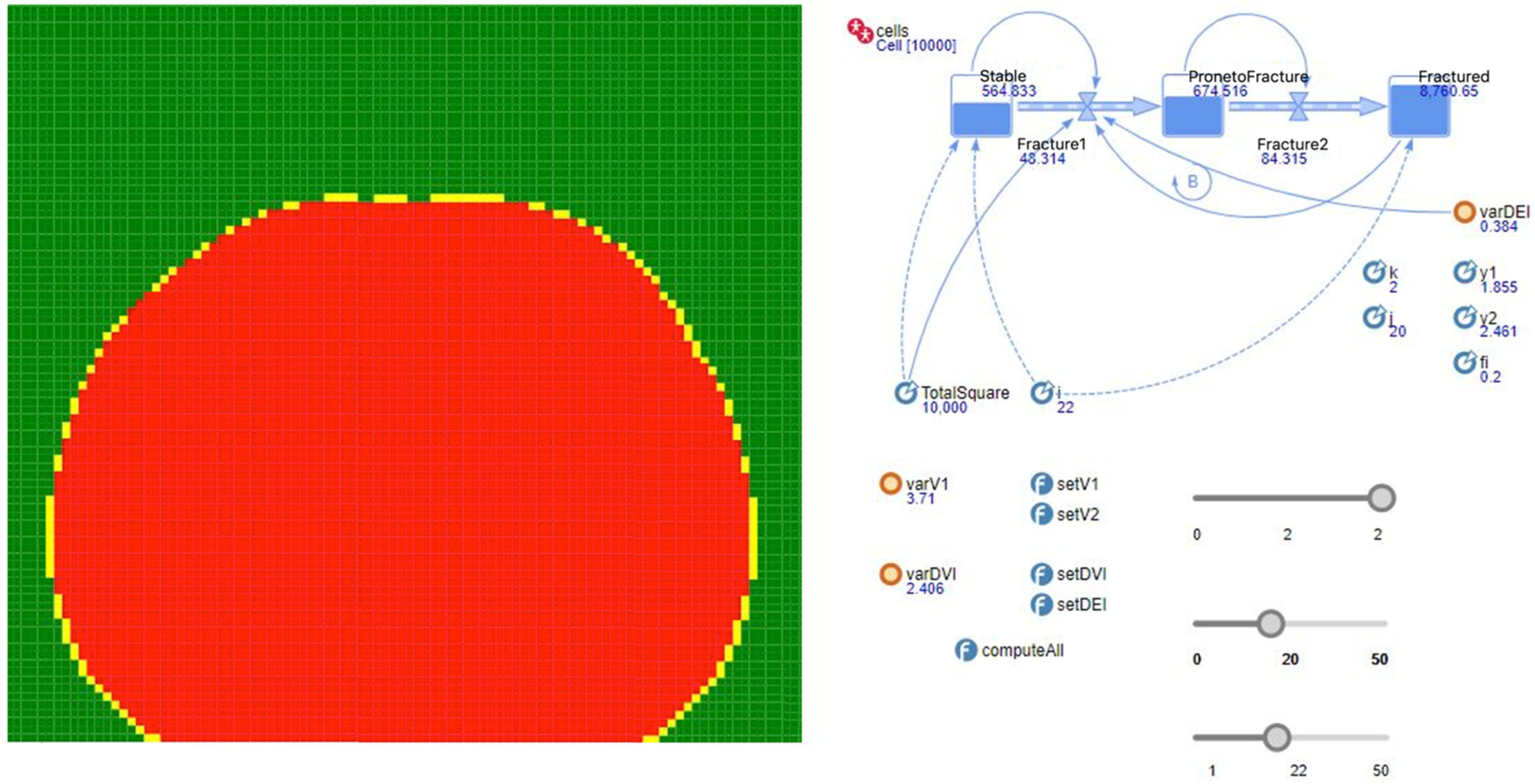
Software implementation of the proposed model and experimental functional runs to assess its performance are carried out in the AnyLogic environment.
Figure 2 demonstrates separate user tools for the dynamic adjustment of the model parameters (runners) and for a visualization of the model run results.
The numerical variation of such parameters as the degree of impact on the mass, the number of worked stopes and exposure time is available in the model run. The flow and storage diagram displays the dynamics of the change in the stress–strain state of the mass from “equilibrium” to “collapsed” during the model time units.
Figure 3 demonstrates a test run of the model with visualization of the geoinformation multi-agent environment representation in the Moore space.
In the course of the experimental modeling, it was determined that the proposed conceptual model is workable. At the same time, the results obtained during the modeling process obviously do not reflect the full complexity of the dynamics of the stress–strain state of the rock mass due to the lack of real data from mining enterprises, such as the hardness and strength of the mined rocks, the quality characteristics of the mined minerals, the composition of the used explosives, the method and blasting scheme, and the characteristics of the mining equipment. In addition, for a more accurate description of the distribution of the deformation changes in the rock mass, it is necessary to consider the order of mining stopes, the number of stopes in operation, the total exposure area, the strength characteristics of the stowing mass and other factors.
However, the obtained geoinformation multi-agent model for assessing the stress–strain state of rock mass clearly demonstrates the dynamics of the propagation of deformation changes, which greatly facilitates the perception of the data obtained as a result of the modeling and, with significant improvements, can be integrated into production management processes for predicting the consequences of intensification works.
The obtained results allow for the progression to the next stage of the study: the development of an algorithm for determining the optimal structure and composition of the stowing mix and its components in the development of a deposit using systems with artificial support. The issue is vital for planning, development and the current supervision of mining production.
4. Statement of the Problem and Initial Data
The aim of this work is to create an algorithm for determining the optimal structure and composition of the backfill material and its components during deposit development by systems with artificial support. The solution to the problem of determining the optimal values or probabilistic manifestations is currently possible using modeling. Various methods of modeling are used in science: physical modeling, modeling based on random numbers and modeling based on developed programs [
2,
18].
The modeling results are aimed at solving a number of applied problems: determining the required strength of the fill mass, calculating the size of inter-stope pillars when mining flat and inclined ore bodies, and establishing the order of deposit development.
The idea of modeling is to create an algorithm for determining the optimal structure and composition of the backfill and its components. The model takes into account the size of the inter-stope pillars and the required strength of the fill mass when underground mining.
In the initial period, the load from the overlying rocks is perceived by inter-stope ore pillars. They interact with the surrounding mass through the zones of support pressure. All this must be taken into account to minimize the risk of the unplanned loss of the stability of the inter-stope pillars. Horizontal displacements of the contour and the near-contour mass can be caused by deformations in the mass without cracks in the walls of the mined-out stopes.
This approach makes it possible to correct the parameters of the inter-stope pillars, the fill mass and the backfill material composition based on an efficiency and safety analysis at any stage of deposit development. The considered inter-stope pillars and artificially created mass, as an object of modeling, are different in their physical compositions and perceived loads. Therefore, universal criteria for assessing the stress–strain behavior of the mass are needed to simplify and ensure high reliability of the mathematical modeling.
It is proposed to evaluate the different-strength sections of the stress–strain system by a complex of interrelated universal criteria: the ore body dip angle; the dip and strike length; the thickness; the width of the inter-stope pillars; and the width of the extraction blocks of the first stage. The width of the left inter-stope pillars and the width of the extraction blocks are affected by the depth of development, the hardness of the adjacent strata and the characteristic strength of the cemented fill mass. The characteristic strength of the fill mass depends on the backfill material components.
Backfill technology involves the creation of fill material capable of hardening in underground conditions. The backfill composite includes the following components: binder (cement, lime, gypsum, blast-furnace slags, slags from power generation plants, etc.), aggregate (specially mined raw materials: gravel; sand; or mining waste, such as tailings of concentrator or crushed rock from stripping operations), water and chemical additives.
The length and intensity of the material flow determine its resource intensity. The resource intensity of a flow in monetary terms estimates its movement and processing costs. The sum of these costs on several segments of the logistics chain, or throughout the entire length from the moment of generation to the moment of the repayment of the flow, is called the accumulated resource intensity. The accumulated resource intensity of the backfill is a key criterion determining the choice of the deposit development system and the backfill composition.
The initial data for modeling are represented by the physical and mechanical properties of the ores and host rocks. The sources of the initial data are the results of studies of the physical and mechanical properties of the ores and host rocks. The studies were carried out during the period of exploration and exploitation in various areas of the Zhdanovskoye deposit Eastern ore cluster and the Tundrovoe deposit. An analysis of these data shows that they are almost completely identical. The main parameters of the ore bodies composing the deposit are presented in
Table 1.
The density of the ore and rock varies from 3.5 to 2.7 ton/m
3, Young’s modulus varies from 12 to 7 × 10
−4 MPa, and the all-around compression modulus varies from 10 to 6 × 10
−4 MPa. The strength characteristics of the ores and host rocks determine stability in terms of the ultimate stress parameter. However, the structural factor plays a decisive role in assessing the mass stability and depends on the structural attenuation coefficient. The calculated data of the strength of the rocks in the mass, taking into account the structural attenuation coefficient, are given in
Table 2.
5. The Mathematical Model Structure and Algorithm
Depending on the application conditions, fill mass is affected by the static (gravitational and tectonic) forces and dynamic loads (from blasting) superimposed on the existing static stress field. Artificial mass can experience the strain of compression, tension, shear, bending and “work” under conditions of uniaxial, biaxial and volumetric compression. The universal backfill characteristic is its strength; the characteristic strength is determined under uniaxial compression according to the permissible limit. The required backfill strength is calculated by one factor or, more often, by several factors: the stability of the vertical exposed surface, horizontal under-mining, permissible backfill deformations and the possibility of equipment movement. The highest of the calculated ones is taken as the characteristic strength.
The load on the artificial mass and its elements is calculated depending on the rock pressure hypothesis:
- -
Set as the rock weight in the volume of the pressure arch, a weak bind and a rock column to the surface;
- -
Found through the host rocks’ displacement under conditions of rock and artificial mass deformation.
When calculating the elements of artificial mass, the following factors are taken into account:
- -
The staging of excavation and its spatial position;
- -
The size of the undermined rock mass;
- -
The lag in the formation of the fill mass in time and space from the work front;
- -
The smooth subsidence of the underworked rocks.
When determining the loads on the supporting pillars from the backfill, the dimensions of the mined-out rock mass are limited to the borehole zone of reduced stresses. In the initial period, inter-stope and panel ore pillars perceive the load from the overlying rocks when using stoping in gentle and inclined deposits. Such pillars interact with the surrounding mass through the support pressure zones. In this case, artificial supports are loaded with their own weight and the rock weight in the roof arch volume or a layer of weak rocks above the ore body. Backfilling at this development stage increases the load-bearing capability of the inter-stope pillars. Thus, the main bearing elements are the ore panel (block) pillars, which are surrounded by artificial pillars during the mining of the remaining ore inter-stope pillars. As the mining span increases, there is an increase in deformations in the ore and artificial supports and the subsidence of the overlying strata of rocks under conditions of combined pillar deformation. The longitudinal strain of the combined pillar (∆
hp) from compressive loads can be determined using Equation (10):
where:
h—the pillar height, m;
γ = ρg—the unit weight of the overlying rocks, N/m3;
ρ—the rock density, kg/m3;
g—the acceleration of gravity, m/sec2;
H—the depth of the excavation, m;
Sr—the roof square supported by the pillar, m2;
Sp—the cross-section square of the ore pillar, m2;
Ep—the proportional modulus for the ore, MPa;
Μp—the coefficient affecting the longitudinal deformation, considering the artificial mass characteristics.
The hardening effect of the backfill on the ore pillars surrounded by artificial ones is estimated by the hardening coefficient, which shows the increase in the bearing capability of the ore supports. The excavation of the pillars that perceive the maximum load leads to an increase in the load on the artificial mass. In this case, the artificial mass is deformed together with the overlying rock strata.
The process of roof subsidence and backfill compression has a damping characteristic. In the mined-out rocks, a zone of tensile stresses is formed, in which the rocks are softened. The zone size and the stratification intensity are a function of the mining span, the deposit slope angle and the lateral repulse coefficient. The influence of the underground stope usually extends to a height of 1.5 spans of the exposed surface. The load from delaminated rocks is summed up with the load from deformations and their own weight. With small sizes of gentle and inclined deposits, the calculation of the load is reduced to determining the arch height and the rock weight in the volume of the caving zone. The height of the cave arch is determined by comparing the tensile stresses in the stope roof with the ultimate tensile strength of the rocks using Equation (11):
where:
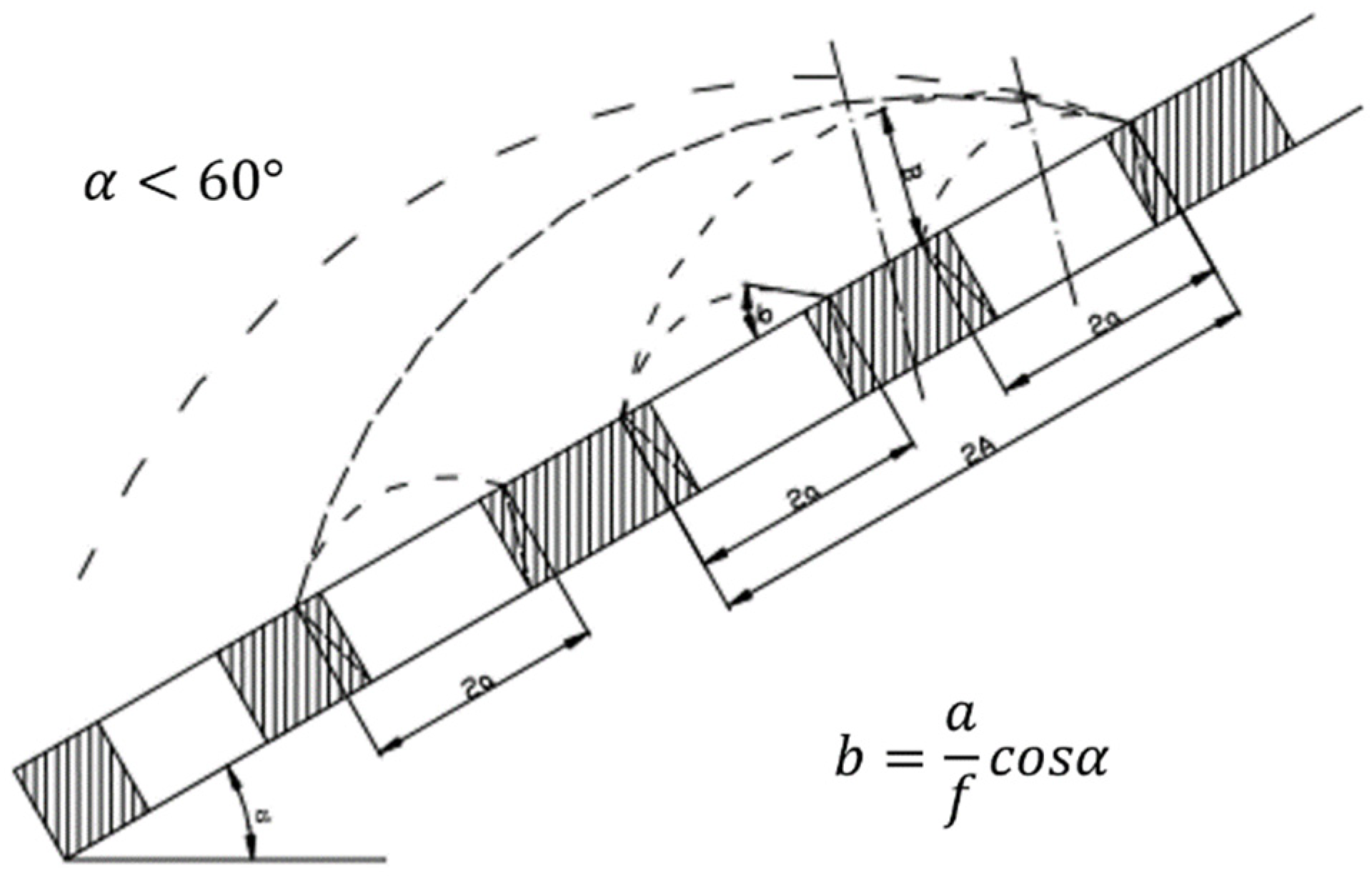
The formula is valid with a horizontal stress equal to 0.2 ÷ 0.3, and the ratio of the depth of the stope roof to its span is greater than two. There are methods for calculating the cave arch height through the shear angle and rock hardness, such as Equation (12):
where:
l—the minimum size of the stope, m;
φ—the angle of the internal friction of the roof rocks, deg.;
f = σc/100—the rock hardness on a scale of Professor M. M. Protodiakonov;
σc—the compressive strength.
The scheme for determining the pressure arch depending on the width of the mined-out mass is shown in
Figure 4.
The reactive effect of the backfill, which reduces the rock stratification zone, is insignificant due to its high compliance, and it can be determined by the dependence using Equation (13):
where:
—the size of the zone of the tensile stresses (caving) in the absence of pressure on the contour, m;
—the backfill pressure on the roof contour, MPa;
—stress in the tight mass at the roof level, MPa.
The loads on artificial mass are mainly created by horizontal components in steeply dipping deposits, developed by stopes and slicing systems with cemented backfill. The action of horizontal components is manifested in the wall convergence of the mined-out void in the area of influence of gravitational and tectonic fields. Due to the high compression properties, the backfill does not significantly affect the stress behavior of the rocks, and it does not change the stress distribution in the surrounding mass. The ore pillars and the rock mass remain the main bearing elements. The purpose of the backfill in this case is to prevent the movement of the softened mass of the stope side and to increase its stability. The quantitative values of the stresses and strains in the fill mass are determined by using the approach of the values of the sides of the mined-out void under conditions of elastic or elastoplastic rock deformation. This takes into account the deformation changes in the unloading zone in the field of gravitational and tectonic forces and the reaction of the artificial mass. The reverse action of the fill mass reduces the displacement of rocks toward the mined-out void. The impact of development extends into the host rocks to a depth equal to 1/4 span, as shown in Equation (14):
where:
With continuous mining, a reduced pressure zone (unloading) is formed in the roof, and an increased pressure zone (support) is formed in the ore mass. The roof rocks interact with the backfill mass as the span of the exposed surface increases and the mined-out void is filled with backfill. Created artificial mass behaves similar to pliable timber.
The pliability of the fill mass is maintained at the full set of strength until it fully realizes the ability to deform under load and accept the full weight of the rock column. The overlying strata act similar to a plate, fixed at one end over the ore mass and supported by the other end on the fill mass. The unloading zone size is proportional to the shrinkage of the backfill material. The stress concentration coefficient of the ore mass is proportional to shrinkage up to
ε = 3%. At
ε ≤ 3%, the overlying strata are displaced smoothly without breaks, and at
ε > 3%, the rocks are stratified in the roof. The stress concentration coefficient in the ore mass is determined by the under-mining span using Equations (15) and (16):
where:
—the base of the natural logarithm;
—the under-mining span, m;
—the depth of the work, m;
—the width of the mined band, m;
—the number of simultaneously mined belts.
As the practice of underground mining shows, the fill mass is only exposed to the weight of the overlying rock strata 40–60 m from the bottom. In the area of actual mining, the mass is loaded with its own weight and the weight of the technological equipment.
Simplified methods are used in engineering calculations. For pillars from the backfill, the research method is limited to the determination of normal stresses over dangerous sections under the assumptions that the pillars work under uniaxial compression and that the stresses are distributed evenly. The actual uneven distribution of stresses in the pillars is considered by introducing a safety factor. Then, the normal stresses in the backfill can be determined (17):
where:
is the load on the artificial pillar, Pa;
is the section area of the pillar, m2.
The algorithm for determining the optimal structure and composition of the backfill, its components during deposit development with artificial support and the choice of the preferred development system with backfill consists of several stages (
Figure 5).
6. Conclusions
1. A method of mathematical modeling aimed at solving the following problems is proposed:
- -
The selection of the optimal development system with backfill when extracting minerals;
- -
The determination of the rational composition of the fill material.
2. The method of mathematical modeling presented by the algorithm involves the sequential execution of various stages.
3. Feasibility evaluation of using a certain system in an underground mine is based on a comparison of static forces and dynamic loads acting on the artificial mass and stresses imposed on the existing static field.
4. The method of mathematical modeling is based on the use of a complex of interrelated universal criteria of the stress–strain behavior of the rock mass, as well as the values of the stress concentration in it, taking into account the reaction of the artificial mass. The values of these criteria depend on the mining parameters: the development depth; the ore body dip angle; the dip and strike length; the thickness and width of the inter-stope pillars; the width of the extraction blocks of the first stage; artificial mass heights; and the composition of the backfill material.
5. Deformation changes and stress concentration are key criteria in the proposed mathematical model, since exceeding the permissible values of the accumulated concentration and strain changes can lead to a man-made disaster.
6. It is possible to select a system with backfill for deposit development and to select the optimal composition of the backfill material using the proposed method for certain conditions.
7. A further direction for research is a case study of the proposed method for its feasibility and a mathematical description of the choice of a mining system with backfill and optimal backfill composition considering the weight (significance coefficient) of each factor.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}