
Design of Low-Voltage FO-[PD] Controller for Motion Systems





Abstract
1. Introduction
- (i)
- Gain crossover frequency :
- (ii)
- Phase margin :
- (iii)
- Specification on robustness to loop gain variations with “flat phase”: This specification demands that the open-loop phase derivative with respect to the frequency is zero:
2. Approximation of Controller Transfer Function
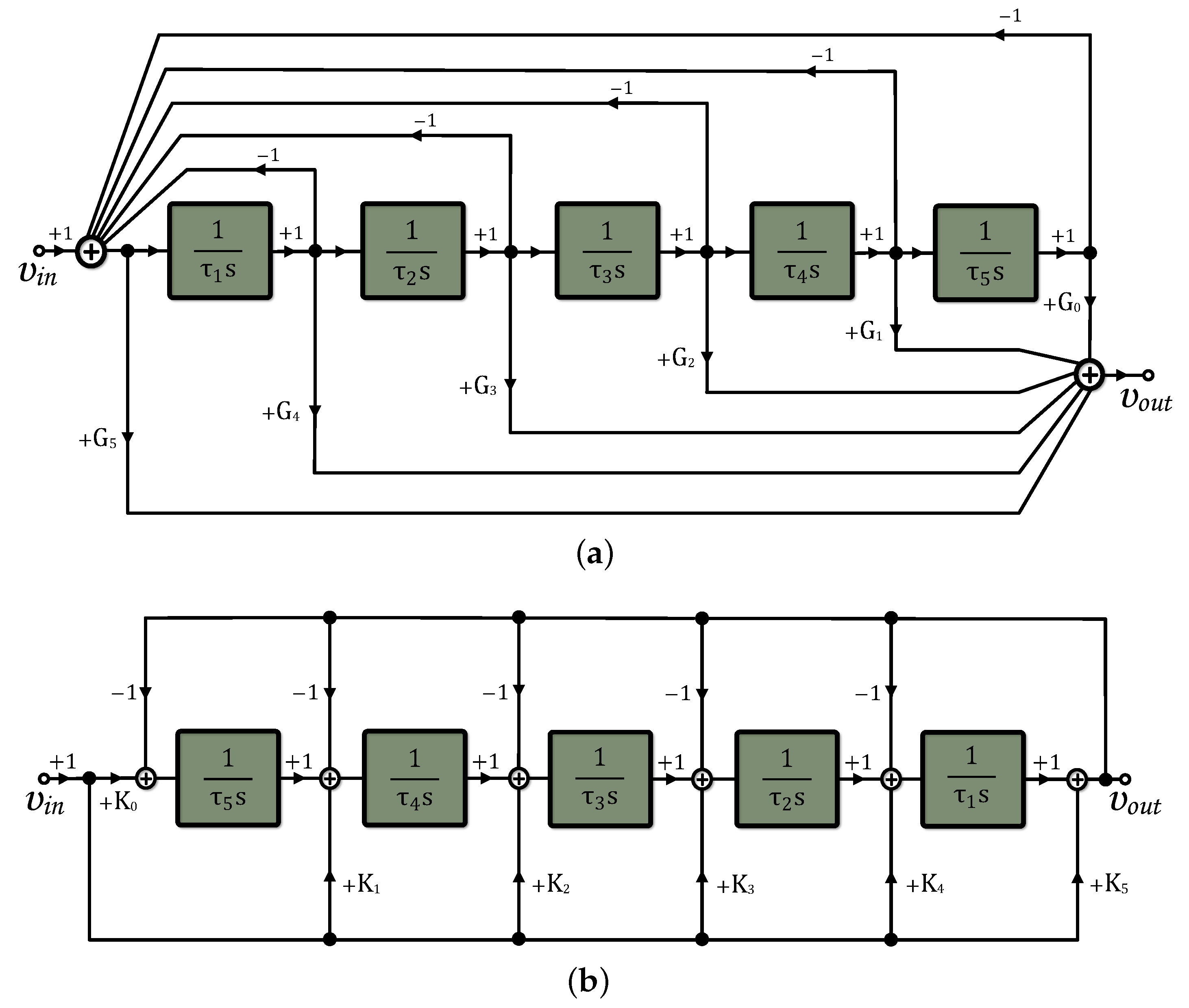
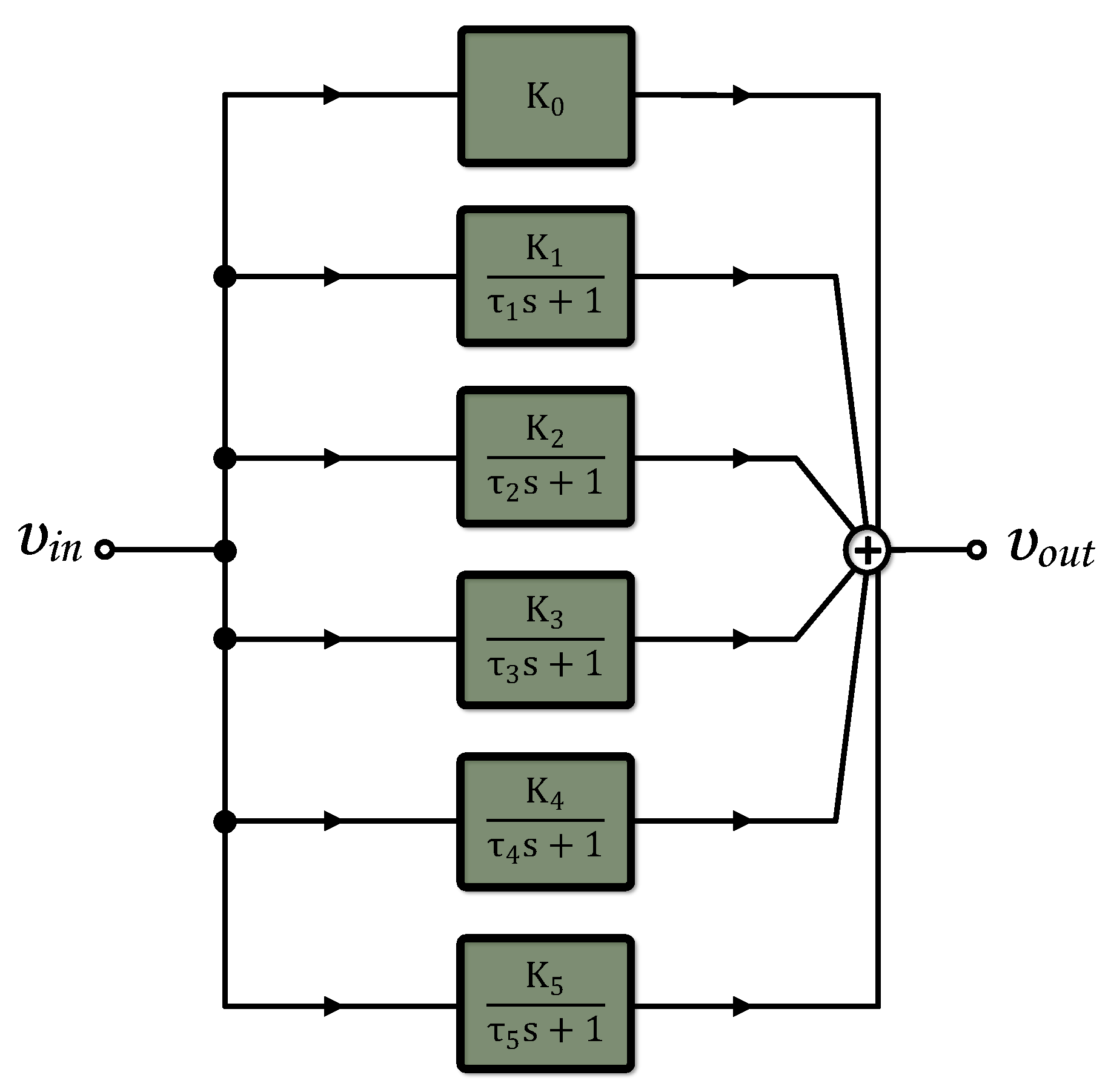
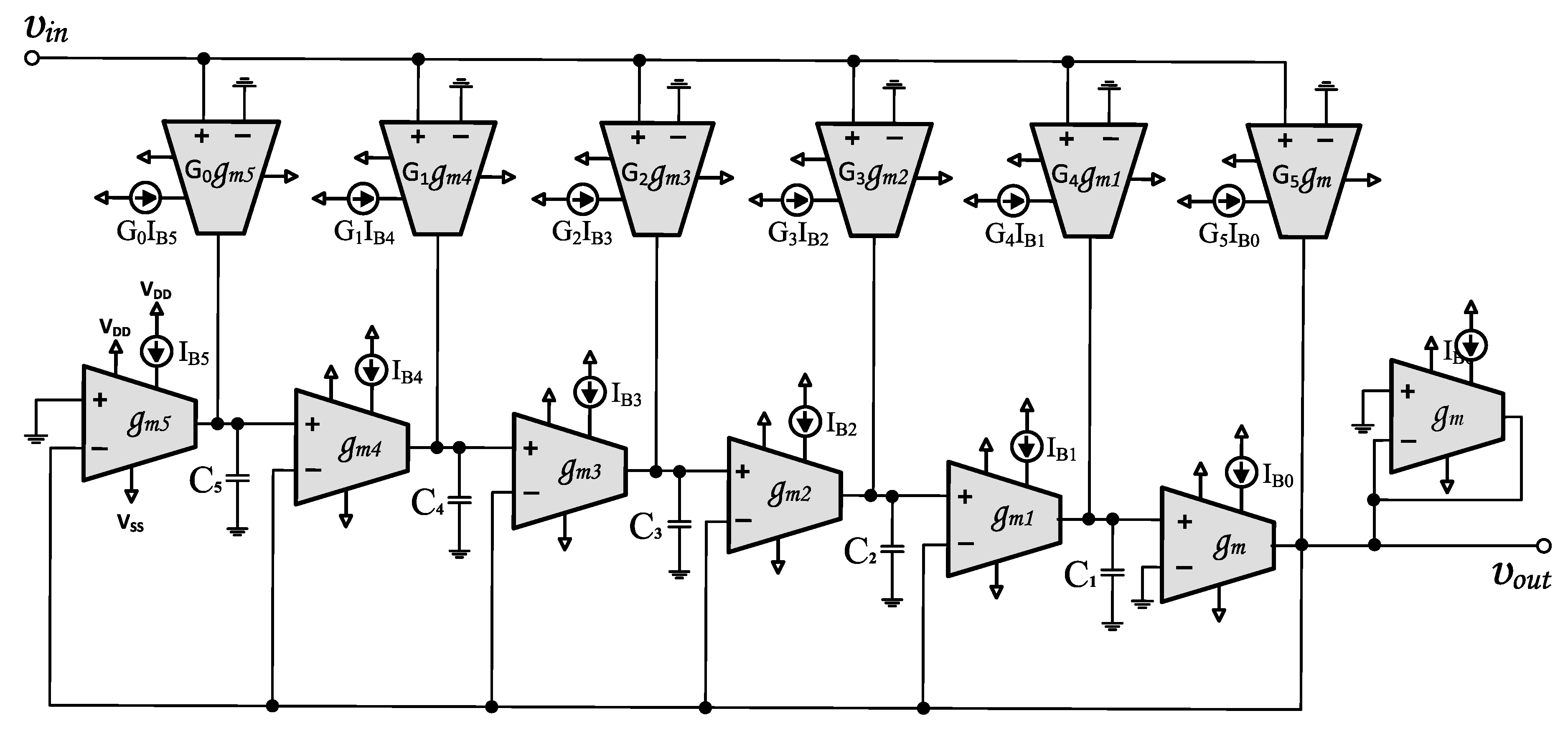
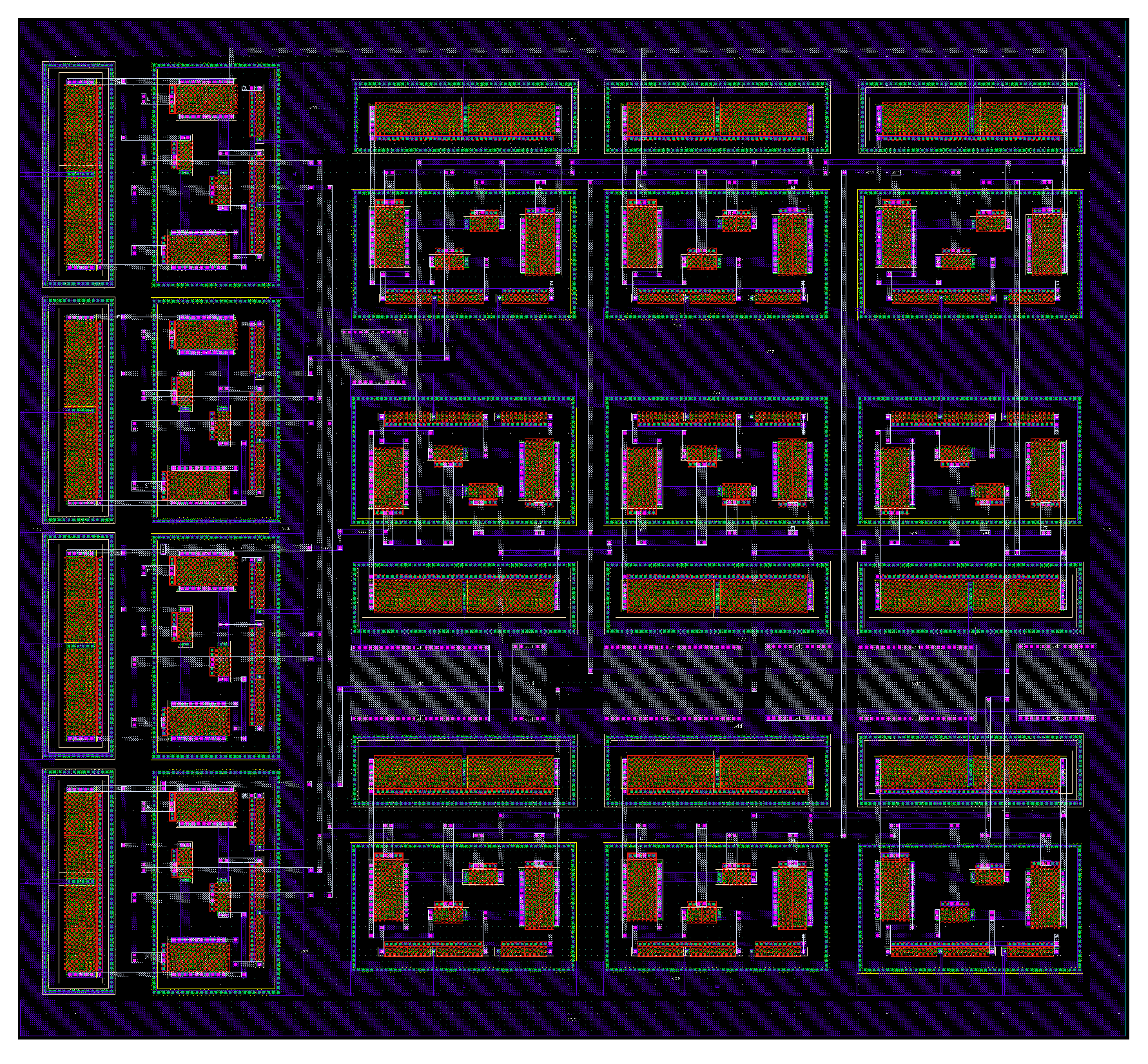
3. Implementation Aspects
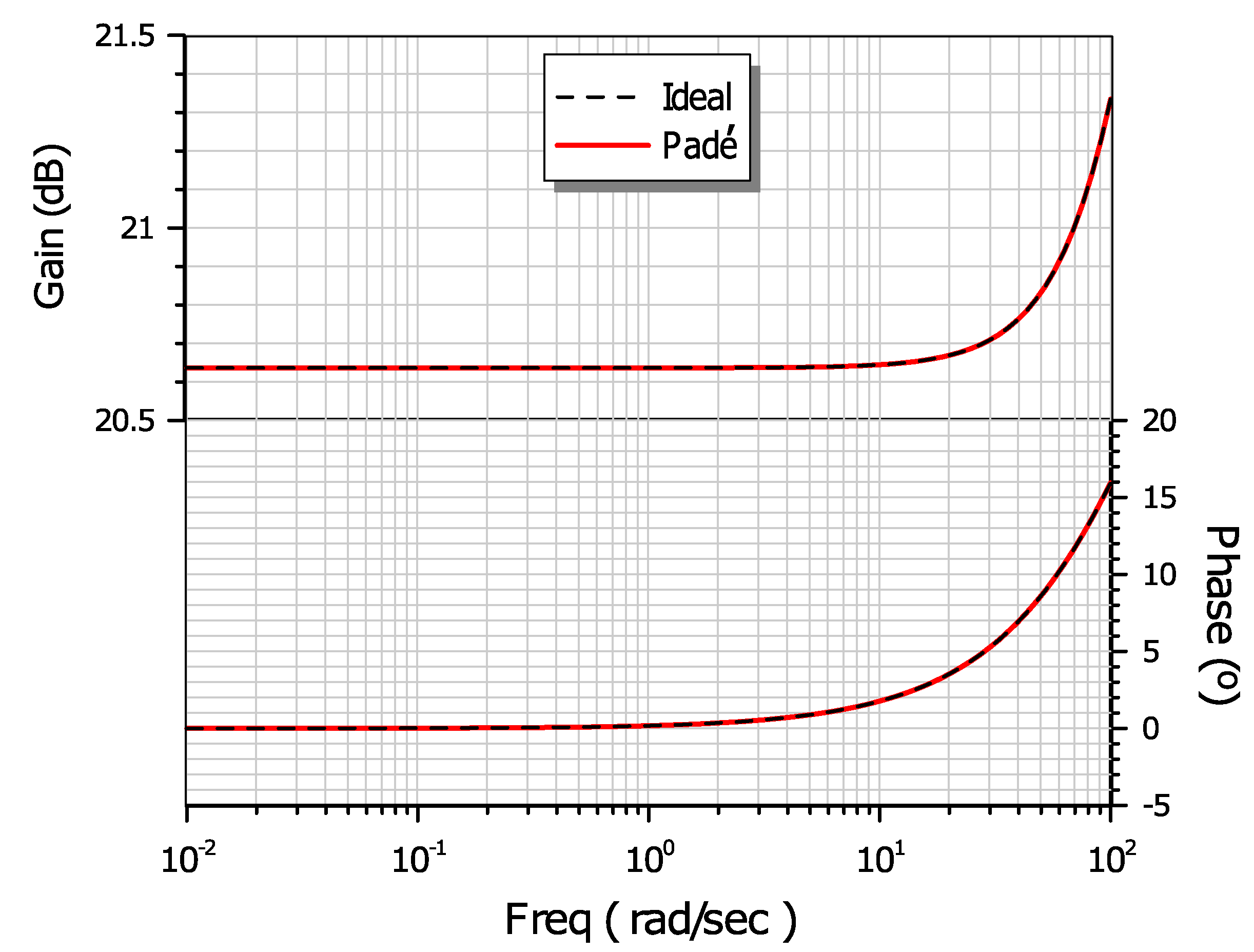
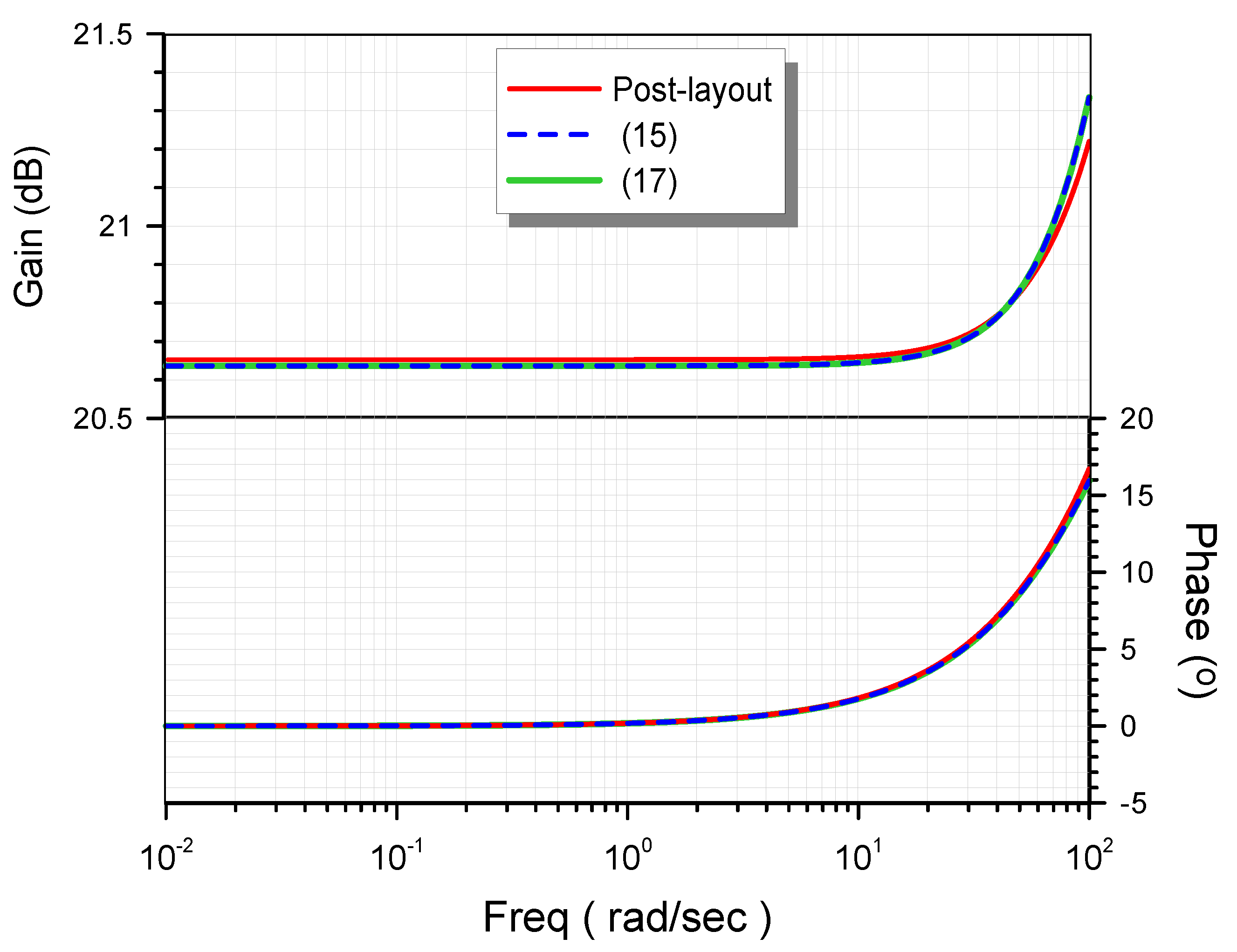
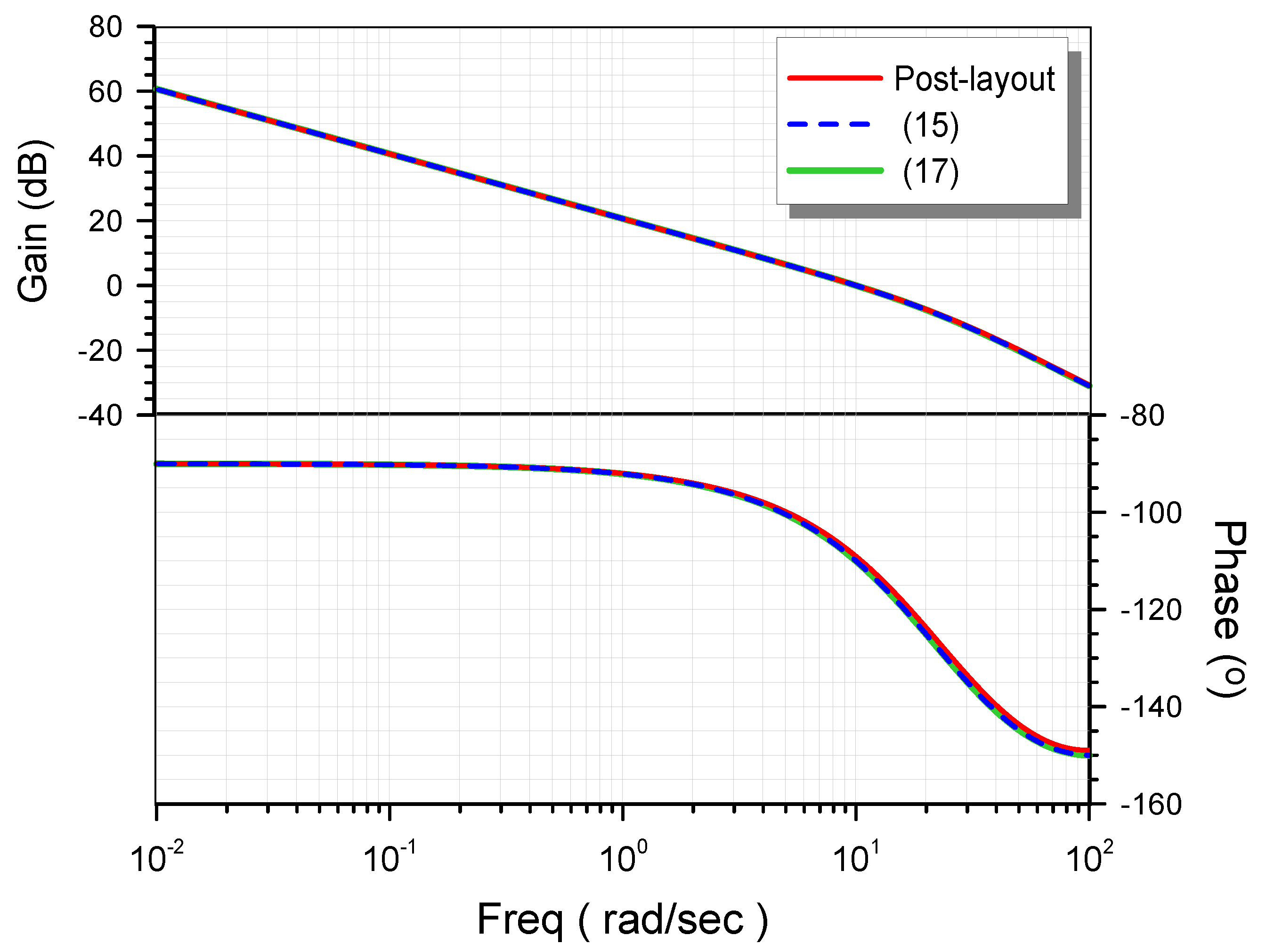
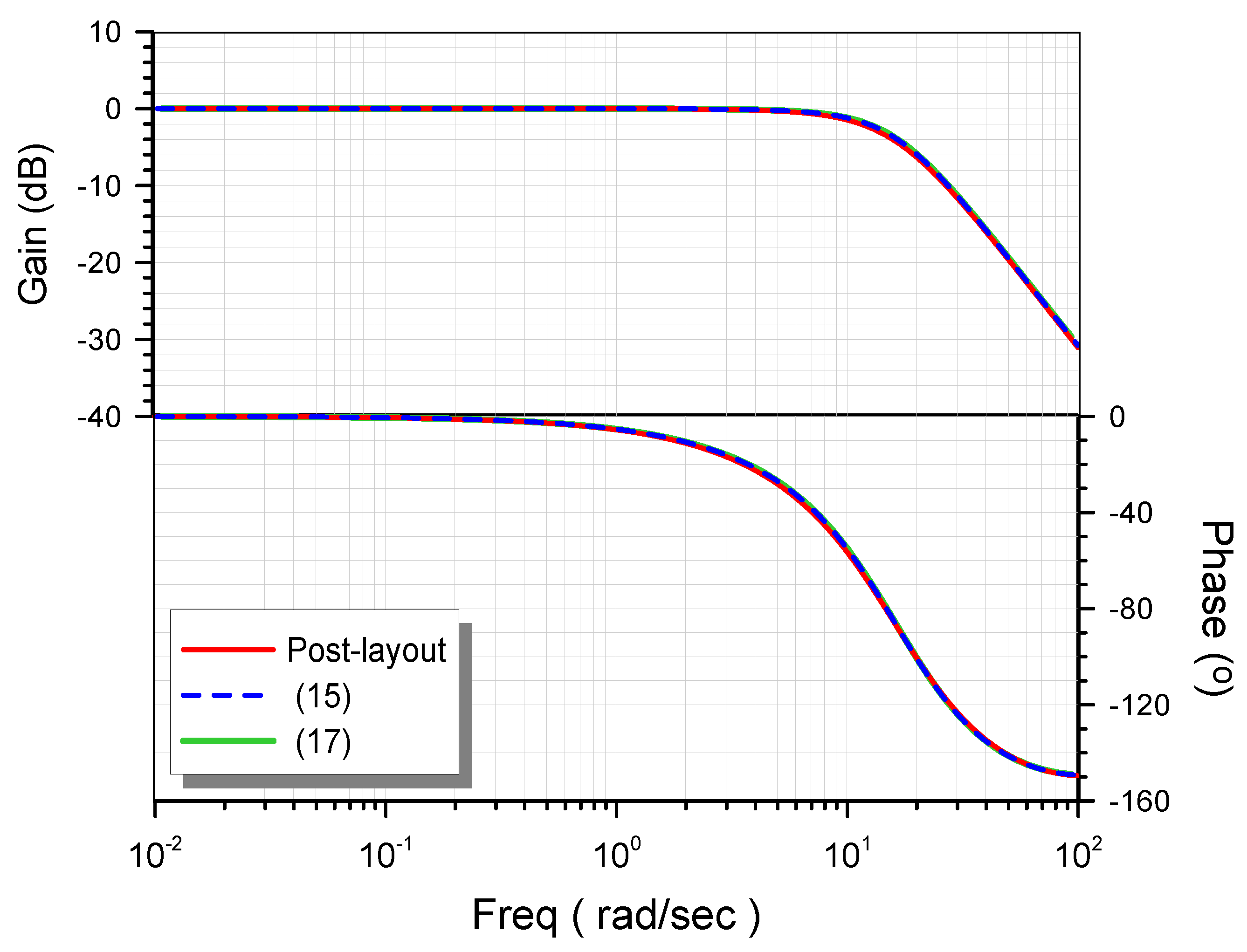
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CMOS | Complementary metal oxide semiconductor |
| FO | Fractional order |
| FBD | Functional block diagram |
| FLF | Follow-the-leader feedback |
| IFLF | Inverse follow-the-leader feedback |
| IC | Integrated circuits |
| IO | Integer order |
| OTA | Operational transconductance amplifier |
| PFE | Partial fraction expansion |
| PID | Proportional integral derivative |
References
- Podlubny, I. Fractional-order systems and PIλDμ controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Podlubny, I.; Petraš, I.; Vinagre, B.M.; O’leary, P.; Dorčák, L. Analogue realizations of fractional-order controllers. Nonlinear Dyn. 2002, 29, 281–296. [Google Scholar] [CrossRef]
- Vinagre, B.M.; Monje, C.A.; Calderón, A.J.; Suárez, J.I. Fractional PID controllers for industry application. A brief introduction. J. Vib. Control 2007, 13, 1419–1429. [Google Scholar] [CrossRef]
- Petráš, I. Fractional-Order Nonlinear Systems; Springer: Berlin, Germany, 2011. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer Science and Business Media: Berlin, Germany, 2010. [Google Scholar]
- Caponetto, R. Fractional Order Systems: Modeling and Control Applications; World Scientific: Singapore, 2010; Volume 72. [Google Scholar]
- Gonzalez, E.; Dorčák, L.; Monje, C.; Valsa, J.; Caluyo, F.; Petráš, I. Conceptual design of a selectable fractional-order differentiator for industrial applications. Fract. Calc. Appl. Anal. 2014, 17, 697–716. [Google Scholar] [CrossRef]
- Dimeas, I.; Petras, I.; Psychalinos, C. New analog implementation technique for fractional-order controller: A DC motor control. AEU-Int. J. Electron. Commun. 2017, 78, 192–200. [Google Scholar] [CrossRef]
- Muñiz-Montero, C.; García-Jiménez, L.V.; Sánchez-Gaspariano, L.A.; Sánchez-López, C.; González-Díaz, V.R.; Tlelo-Cuautle, E. New alternatives for analog implementation of fractional-order integrators, differentiators and PID controllers based on integer-order integrators. Nonlinear Dyn. 2017, 90, 241–256. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Single active element implementation of fractional-order differentiators and integrators. AEU-Int. J. Electron. Commun. 2018, 97, 6–15. [Google Scholar] [CrossRef]
- Kapoulea, S.; Tsirimokou, G.; Psychalinos, C.; Elwakil, A. OTA-C Implementation of Fractional-Order Lead/Lag Compensators. In Proceedings of the 2019 Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 28–30 October 2019; Volume 1, pp. 38–41. [Google Scholar]
- Krijnen, M.E.; van Ostayen, R.A.; HosseinNia, H. The application of fractional order control for an air-based contactless actuation system. ISA Trans. 2018, 82, 172–183. [Google Scholar] [CrossRef]
- van Duist, L.; van der Gugten, G.; Toten, D.; Saikumar, N.; HosseinNia, H. FLOreS-Fractional order loop shaping MATLAB toolbox. IFAC-PapersOnLine 2018, 51, 545–550. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.; HosseinNia, S.H. Linear fractional order controllers; A survey in the frequency domain. Annu. Rev. Control 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Psychalinos, C. Development of fractional-order analog integrated controllers–application examples. In Applications in Control; De Gruyter: Berlin, Germany, 2019; p. 357. [Google Scholar]
- Talebi, S.P.; Werner, S.; Li, S.; Mandic, D.P. Tracking dynamic systems in α-stable environments. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4853–4857. [Google Scholar]
- Kapoulea, S.; Bizonis, V.; Bertsias, P.; Psychalinos, C.; Elwakil, A.; Petráš, I. Reduced Active Components Count Electronically Adjustable Fractional-Order Controllers: Two Design Examples. Electronics 2020, 9, 63. [Google Scholar] [CrossRef]
- Bauer, W.; Baranowski, J. Fractional PIλD Controller Design for a Magnetic Levitation System. Electronics 2020, 9, 2135. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID controllers and their industrial applications: A survey of recent results. IFAC-PapersOnLine 2018, 51, 25–30. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Fractional-order [proportional derivative] controller for robust motion control: Tuning procedure and validation. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1412–1417. [Google Scholar]
- Luo, Y.; Chen, Y. Fractional Order Motion Controls; Wiley Online Library: Hoboken, NJ, USA, 2012. [Google Scholar]
- Petráš, I. Handbook of Fractional Calculus with Applications: Vol. 6: Applications in Control; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2019. [Google Scholar]
- HosseinNia, S.H.; Saikumar, N. Fractional-order Precision Motion Control for Mechatronic Applications. In Handbook of Fractional Calculus with Applications; Petráš, I., Ed.; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2019; Volume 6, pp. 339–356. [Google Scholar]
- Luo, Y.; Chen, Y.; Pi, Y. Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 2011, 21, 204–214. [Google Scholar] [CrossRef]
- Malek, H.; Luo, Y.; Chen, Y. Identification and tuning fractional order proportional integral controllers for time delayed systems with a fractional pole. Mechatronics 2013, 23, 746–754. [Google Scholar] [CrossRef]
- Krishna, B.T. Studies on fractional order differentiators and integrators: A survey. Signal Process. 2011, 91, 386–426. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Tavakoli-Kakhki, M. Compensation by fractional-order phase-lead/lag compensators. IET Control Theory Appl. 2014, 8, 319–329. [Google Scholar] [CrossRef]
- Lanusse, P.; Sabatier, J.; Gruel, D.N.; Oustaloup, A. Second and third generation CRONE control-system design. In Fractional Order Differentiation and Robust Control Design; Springer: Dordrecht, The Netherlands, 2015; pp. 107–192. [Google Scholar]
- Xue, D. Fractional-Order Control Systems: Fundamentals and Numerical Implementations; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2017; Volume 1. [Google Scholar]
- Bošković, M.Č.; Rapaić, M.R.; Šekara, T.B.; Mandić, P.D.; Lazarević, M.P.; Cvetković, B.; Lutovac, B.; Daković, M. On the rational representation of fractional order lead compensator using Padé approximation. In Proceedings of the 2018 7th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 10–14 June 2018; pp. 1–4. [Google Scholar]
- Kapoulea, S.; Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S. Employment of the Padé Approximation for Implementing Fractional-Order Lead/Lag Compensators. AEU-Int. J. Electron. Commun. 2020, 120, 153203. [Google Scholar] [CrossRef]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A. Design of CMOS Analog Integrated Fractional-Order Circuits: Applications in Medicine and Biology; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Bertsias, P.; Psychalinos, C.; Maundy, B.J.; Elwakil, A.S.; Radwan, A.G. Partial fraction expansion—Based realizations of fractional-order differentiators and integrators using active filters. Int. J. Circuit Theory Appl. 2019, 47, 513–531. [Google Scholar] [CrossRef]
- Mohan, P.A. VLSI Analog Filters: Active RC, OTA-C, and SC; Springer Science and Business Media: Berlin, Germany, 2012. [Google Scholar]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S. Emulation of a constant phase element using operational transconductance amplifiers. Analog Integr. Circuits Signal Process. 2015, 85, 413–423. [Google Scholar] [CrossRef]
- Muñiz-Montero, C.; Sánchez-Gaspariano, L.A.; Sánchez-López, C.; González-Díaz, V.R.; Tlelo-Cuautle, E. On the electronic realizations of fractional-order phase-lead-lag compensators with OpAmps and FPAAs. In Fractional Order Control and Synchronization of Chaotic Systems; Springer: Cham, Switzerland, 2017; pp. 131–164. [Google Scholar]
- Tlelo-Cuautle, E.; Pano-Azucena, A.D.; Guillén-Fernández, O.; Silva-Juárez, A. Analog/Digital Implementation of Fractional Order Chaotic Circuits and Applications; Springer: Cham, Switzerland, 2020. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Controller | Order | Transfer Function |
|---|---|---|
| FO-PI | ||
| FO-[PI] | ||
| FO-PD | ||
| FO-[PD] |
| Coefficient | Value | Coefficient | Value |
|---|---|---|---|
| 124 | – | – |
| IFLF | PFE | ||
|---|---|---|---|
| Variable | Value | Variable | Value |
| 124 | |||
| 124 | |||
| (ms) | (ms) | ||
| (ms) | (ms) | ||
| (ms) | (ms) | ||
| (ms) | (ms) | ||
| (ms) | (ms) | ||
| Transistor | Aspect Ratio () |
|---|---|
| – | 5/15 μm/μm |
| , | 10/5 μm/μm |
| – | 2/5 μm/μm |
| – | 1/8 μm/μm |
| Bias Current | Value | Capacitor | Value |
|---|---|---|---|
| 392.2 pA | – | – | |
| 597.5 pA | 0.886 pF | ||
| 107.8 pA | 1.15 pF | ||
| 31.13 pA | 1.01 pF | ||
| 34.0 pA | 2.52 pF | ||
| 32.4 pA | 7.30 pF |
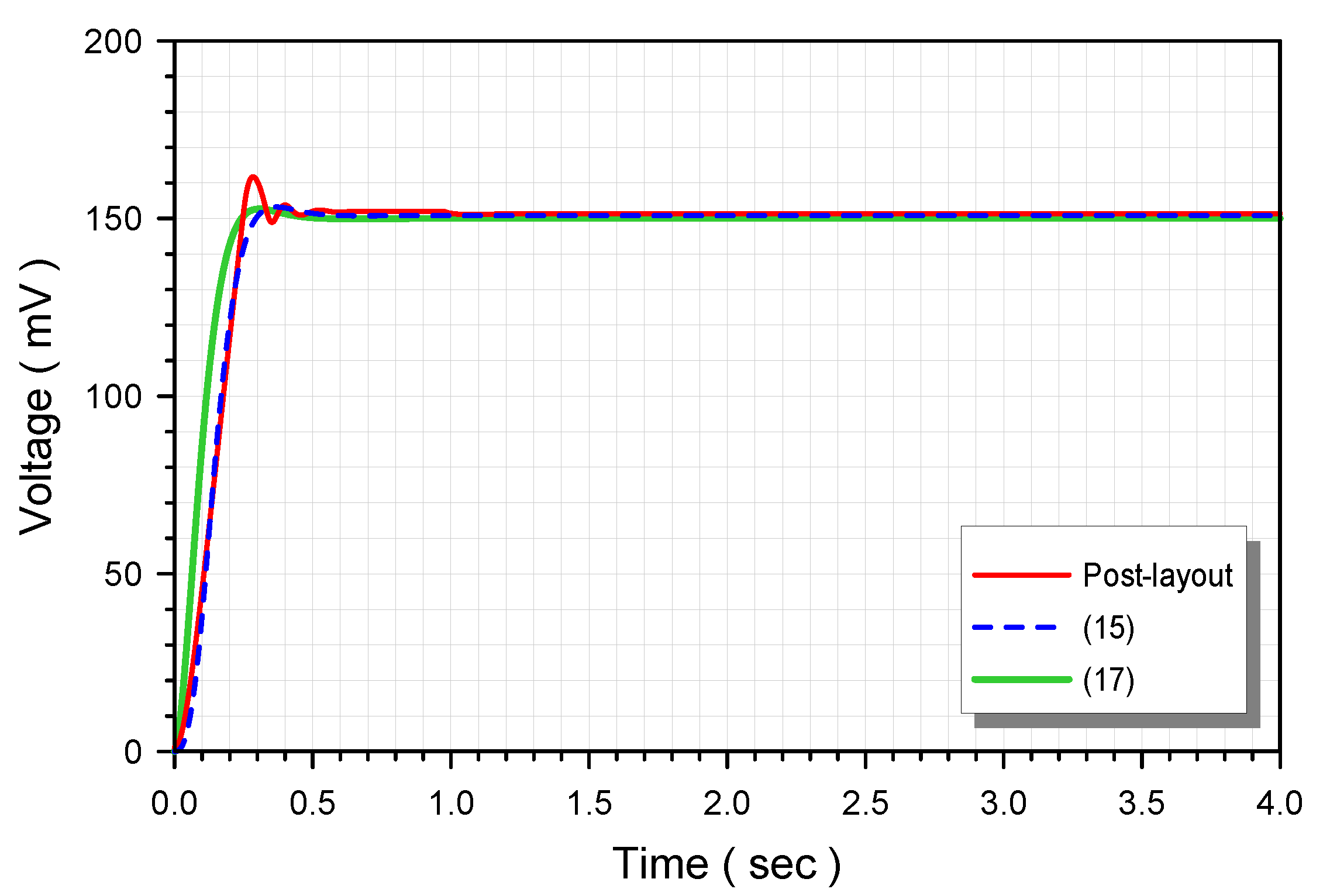
| System | Phase Margin | Overshoot | Settling Time | Rise Time |
|---|---|---|---|---|
| Ideal | 70.00° | 1.621% | 256.1 ms | 164.3 ms |
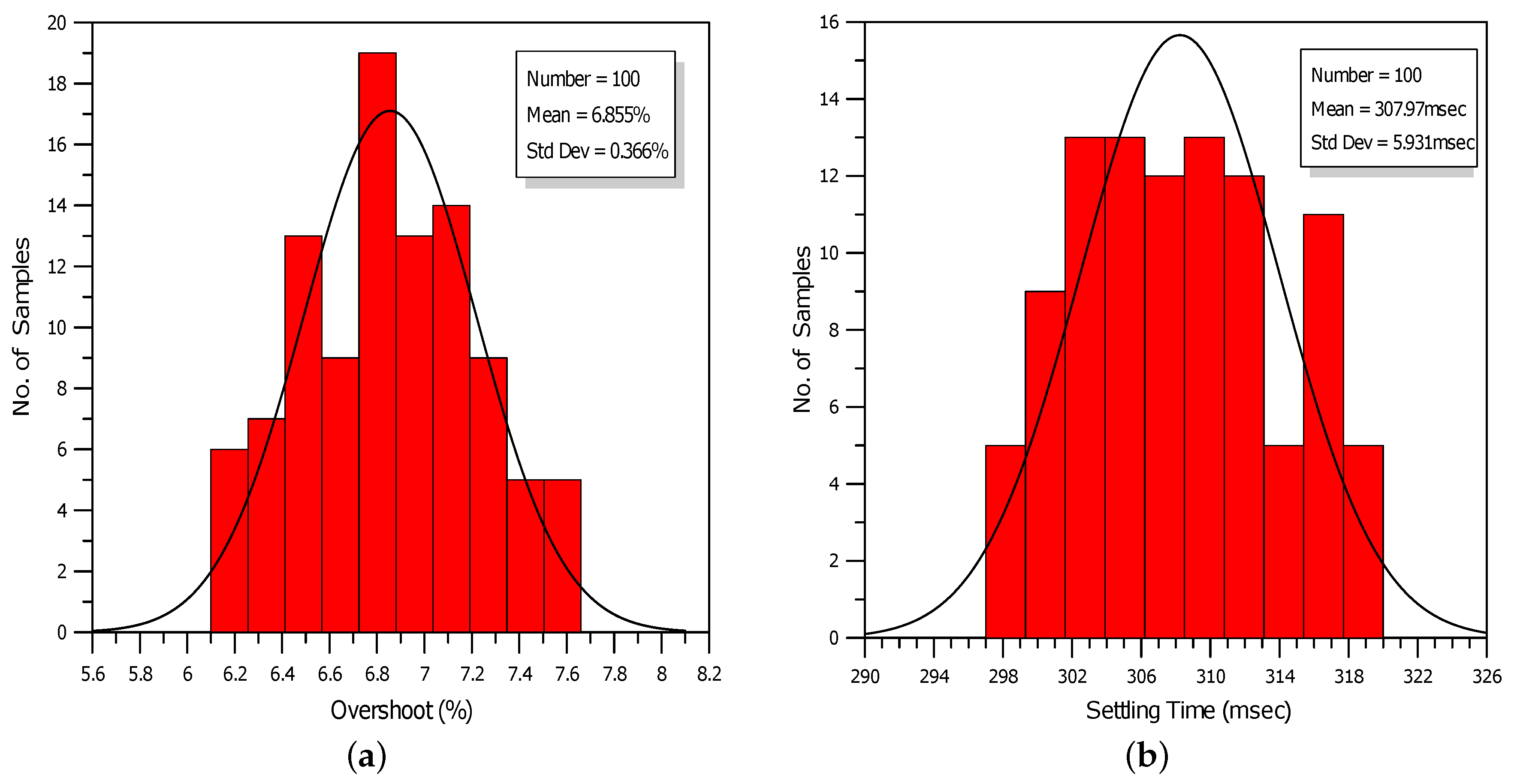
| Post-layout | 70.86° | 6.866% | 308.2 ms | 178.0 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malatesta, R.; Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Design of Low-Voltage FO-[PD] Controller for Motion Systems. J. Low Power Electron. Appl. 2021, 11, 26. https://doi.org/10.3390/jlpea11020026
Malatesta R, Kapoulea S, Psychalinos C, Elwakil AS. Design of Low-Voltage FO-[PD] Controller for Motion Systems. Journal of Low Power Electronics and Applications. 2021; 11(2):26. https://doi.org/10.3390/jlpea11020026
Chicago/Turabian StyleMalatesta, Rafailia, Stavroula Kapoulea, Costas Psychalinos, and Ahmed S. Elwakil. 2021. "Design of Low-Voltage FO-[PD] Controller for Motion Systems" Journal of Low Power Electronics and Applications 11, no. 2: 26. https://doi.org/10.3390/jlpea11020026
APA StyleMalatesta, R., Kapoulea, S., Psychalinos, C., & Elwakil, A. S. (2021). Design of Low-Voltage FO-[PD] Controller for Motion Systems. Journal of Low Power Electronics and Applications, 11(2), 26. https://doi.org/10.3390/jlpea11020026