Abstract
Connected and automated vehicles (CAVs) are poised to revolutionize mobility. The relocation feature of CAVs enhances parking convenience for the public. Users can instruct CAVs to arrive at their work destination, drop them off, and then assign CAVs to a cost-effective parking facility through an optimized itinerary. However, realizing the benefits of CAVs depends on user acceptance, and the impact of relocation features on CAV acceptance remains an area that is yet to be explored. This study introduces a novel acceptance model to mainly investigate the effects of relocation-related factors on CAV acceptance through 717 valid responses. The results indicate that the perceived convenience of relocation (PCOR) indirectly increases human acceptance through three determinants, initial trust, perceived usefulness (PU), and perceived ease of use (PEOU), while initial trust, PU, and PEOU directly increase human acceptance. The public expectations of saving on parking fees (EOSPF) can enhance PCOR. Additionally, a multigroup analysis revealed that PCOR exerts a more positive impact on PU or PEOU in subgroups including males, pre-Generation-Z individuals, experienced drivers, and those with autopilot riding experience. The findings on mediators are also discussed. This study provides valuable insights for further research and the practical adoption of emerging CAVs.
1. Introduction
The automotive industry is on the brink of change [1,2]. Automated vehicles (AVs) are products of the deep integration of the automotive industry with information technologies [3]. It is considered that there are six levels of automation, ranging from Level 0 to Level 5 [4], capable of relieving some or all of drivers’ tasks. The mobility community generally agrees that automated vehicles have the potential to transform transportation, consumer behavior, and society at large [5]. Connected vehicles (CVs) are equipped with internet access to share digital information with other connected vehicles, infrastructure, and all traffic management systems [6]. CVs will facilitate crucial applications, such as traffic collision detection, traffic signal control, and route optimization [7], thereby enhancing traffic efficiency and safety [8]. Some researchers [1] believed that connected vehicles would be commonplace in the future. Currently, the automotive industry is actively embracing the development of automated and connected vehicles (CAVs), which combine the characteristics of AVs and CVs. It is anticipated that CAVs will play a pivotal role in the next generation of collaborative intelligent transportation systems [9,10], and CAVs will be seen as the norm in future vehicle design and manufacturing [6].
In recent years, corporations and governmental entities have actively pursued the development of CAVs. This domain represents a pivotal focus for high-tech companies. Since 2010, investors have infused nearly USD 330 billion into over 2000 mobility-focused enterprises, emphasizing automation, connectivity, electrification, and shared mobility (ACES), with approximately two thirds allocated specifically to automation and connectivity [11]. Beyond the corporate sector, regulations have been established to support automated mobility services in some countries, including the United States, Germany, and China [5]. For example, Germany has enacted comprehensive legislation regarding Automated Vehicles (AVs), allowing a European Original Equipment Manufacturer (OEM) to introduce Level 3 features in its current model [5]. China has initiated the use of connected and automated highway sections with holographic sensing capabilities on a trial basis, intended for Level 4 automated testing vehicles [12]. It has been predicted that automated vehicle technology will be cautiously and selectively adopted by 2035 [13].
The widespread adoption of CAVs is poised to significantly impact future travel patterns [14]. Mobility players cannot ignore the development in automation and connectivity if they wish to achieve a competitive edge in the coming decade [11]. CAVs are anticipated to contribute to improving travel services, mitigating traffic accidents, and protecting the environment [1,8,15,16]. Furthermore, CAVs can relocate to a parking space autonomously after dropping off passengers [17,18]. This innovative parking approach in CAVs holds promise for alleviating the complex urban parking challenges. However, the evolution of CAVs has not uniformly yielded positive outcomes, and diverse views about CAVs persist regarding their implications [19]. For instance, there are still many uncertainties concerning technological development [20,21] and regulatory policies [22,23], as well as the safety and privacy considerations associated with CAVs [1,15,24]. These uncertainties possess the potential to significantly impact the future adoption of this emergent mode of transportation [16], thereby constituting a prospective challenge in terms of acceptance and adoption for CAVs [25]. Consequently, a thorough investigation into the factors influencing the public acceptance of CAVs and their underlying mechanisms is imperative for enhancing future adoption rates and fostering the marketization of CAVs.
In the literature concerning the acceptance of automated vehicles, existing research predominantly delves into public acceptance through the perspectives of human factors, economic attributes, and considerations related to artificial intelligence (AI). Many scholars have focused on the influence of human factors on users’ acceptance of automated vehicles. For instance, Zhang et al. have substantiated the significance of initial trust in the adoption of AVs [26,27]. Concurrently, their study also demonstrated the influential role of users’ personality traits in shaping the intention to use AVs. Choi and Ji [28] have also validated the impact of personality attributes on users’ acceptance. Qian et al. [24] have moved a step further by concluding that personal values, reasons, and ethics play an influential role in influencing consumer acceptance of SAVs. Their research delves into the mechanisms through which these factors exert their influence. At the same time, several researchers have concentrated on how economic issues affect acceptance [3,29,30,31]. Kapser and Abdelrahman [32] identified that price sensitivity was the most important influencing factor for user acceptance of automated delivery vehicles. Other researchers [31] held a similar view, that the impact of accident liability and maintenance costs may delay the acceptability of automated vehicles. At the same time, the user’s income status and housing size also affects their acceptance of automated vehicles [21]. A study by Shen et al. [33] makes a similar point that the higher the income, the more travelers tend to accept the use of more automated vehicles. Acceptance also relates to AI factors. Research conducted by Yoganathan and Osburg [34] revealed that service failures in fully automated vehicles, in contrast to conventional vehicles, do not escalate negative emotions among users, and that they strongly predict readiness to adopt automated vehicles. Furthermore, a study by Wu et al. [21] suggested that the level of autonomy and the anthropomorphic features of SAVs would significantly contribute to user acceptance. In contrast to the factors mentioned above, the literature still lacks an exploration of the impact of situational properties on the acceptability of CAVs [35]. Specific scenarios have the potential to immerse travelers more deeply in this novel mode of transportation [36]. Public attitudes may also vary with the scenario, so it is necessary to study the effect of specific situational properties on public acceptance [35]. Existing investigations into the situation-based acceptance of automated vehicles predominantly concentrate on the perceived value of time during driving. For example, Zou et al. [3] discussed the importance of the perceived value of time in public acceptance of AVs. However, the potential influence of relocation on the acceptance of CAVs needs to be addressed more thoroughly. Therefore, it is crucial to assess how relocation might shape the acceptance of CAVs. This paper aims to investigate the public acceptance of CAVs through the perspective of relocation, probing into whether relocation indeed affects CAV acceptance—a dimension that received limited attention in prior research on CAV acceptance.
In this study, relocation was selected as a domain-specific antecedent for the following reasons. One of the crucial transformations that will be inevitably anticipated with the advent of CAVs is an alteration in parking dynamics [1]. First, the parking scenarios for CAVs will be completely different from those associated with human-driven vehicles (HVs). In the operational context of CAVs, the relocation parking method can be described as follows. When an individual commutes from home to the Central Business District (CBD), a Level 5 connected and automated vehicle will be instructed to realize the route from home to workplace, ensuring the user arrives at their workplace first. Subsequently, the individual will designate a trip for the CAV to an economically efficient parking facility; these are primarily situated in suburban areas [17]. After the completion of the workday, the CAV will receive instructions to proceed to the workplace, collect the passenger, and subsequently return to the user’s residence. This kind of parking process can be termed the “relocation” of CAVs, which differs from the conventional parking approach conducted by human-driven vehicles. Figure 1a,b presents the parking modes of human-driven vehicles and CAVs, respectively. Second, the relocation feature of CAVs is likely to influence parking prices and the mode of parking management [37,38], thereby significantly enhancing convenience for travelers. Users will not need to worry about whether they can find parking spaces, and they will be able to find cost-effective parking spaces more conveniently [18]. Jia et al. [37] also discovered that travelers are inclined to opt for relocation as a means of reducing parking expenses.
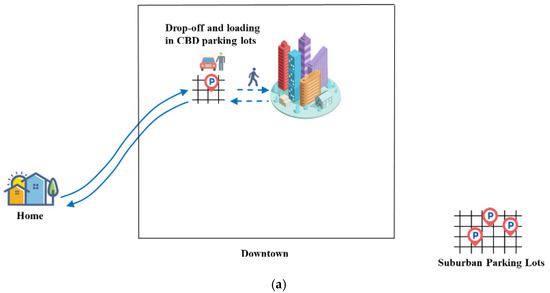
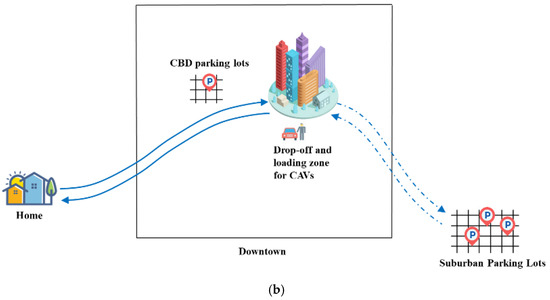
Figure 1.
(a) Parking modes of human-driven vehicles. (b) Parking modes of connected and automated vehicles.
Several researchers have investigated the distinctive attributes arising from the relocation of automated vehicles [38,39,40]. They agree with the idea that CAVs will change the parking modes in the future. For example, Levin et al. [17] designed a new parking infrastructure based on the relocation properties of automated vehicles, and on this basis, Kang et al. [40] investigated the potential traffic impacts of AVs on parking behavior. In this context, Wang et al. [18] modeled the optimal parking management method based on the relocation property of connected automated vehicles (CAVs) by considering multiple parking lots in a given area. On the other hand, Zhang et al. [41] found that the increase in AVs may cause traffic congestion in cities. Later, Jia et al. [37] investigated AVs’ relocation parking preferences and concluded that AVs have the potential to induce VMT. Considering the possible congestion caused by AVs, Bahrami et al. [39] proposed a parking management method through a Wardrop equilibrium for private and automated vehicles in urban centers. Furthermore, Radvand et al. [38] captured the impact of traffic congestion that may result from cruising instead of parking by modeling three parking options for PAVs. The McKinsey Center for Future Mobility [42] held that regulators must consider the reshaping of infrastructure as automated vehicles become more prevalent. It is evident from the preceding discussion that the majority of the studies pertaining to relocation predominantly concentrated on aspects such as parking behavior, parking management, and their subsequent implications for traffic. However, scant attention has been given to exploring whether relocation influences the human acceptance of CAVs. Consequently, there is a need for an inquiry into the potential impact of relocation properties on the public acceptance of CAVs.
To address the gaps mentioned above, and in light of the ongoing initiatives in China, where both the government and businesses are expediting the exploration and testing of CAVs [12,43], this study examines the factors influencing users’ acceptance of CAVs, with a specific focus on the aspect of relocation. Specifically, we established a theoretical model framework for the acceptance of CAVs through the Technology Acceptance Model (TAM) and the Unified Theory of Acceptance and Use of Technology (UTAUT). In this framework, we integrated two constructs, the perceived convenience of relocation and the expectation of saving parking fees, into the decision-making process involved in users’ adoption of CAVs. Essentially, we assessed whether relocation influenced users’ adoption of CAVs and which factors supported the acceptance of CAVs. The present study is intended to provide three contributions:
- This paper is an attempt to gain insight into accepting CAVs from the perspective of relocation scenarios. We propose a novel research framework, integrating modifications to the modified TAM model and the UTAUT model to acquire comprehensive empirical evidence. Our objective is to investigate the influence of the relocation feature on the acceptance of CAVs.
- We rigorously assess the well-established reliability and validity of our model to substantiate its explanatory power. This validation process strengthens the persuasiveness of the conclusions drawn in this research.
- We conducted a multigroup analysis to examine the moderating effects of socioeconomic and travel attributes on behavioral intention. Additionally, we validated and analyzed the mediating effect model of relocation to elucidate its specific roles and influence mechanisms within the acceptance model.
This study proceeds as follows. Section 2 reviews the theoretical background and develops research hypotheses and models. In Section 3, the questionnaire survey and data processing methods are elaborated in detail. Section 4 includes a descriptive analysis, a measurement model analysis, a structural model analysis, mediating effect tests, and moderating effect tests. Next, Section 5 discusses the research findings. We conclude in Section 6.
2. Literature Review and Model Development
2.1. The Development of Acceptance Theory
Before examining the effect of relocation on the acceptance of CAVs, it is necessary to review the theoretical foundations and research background on the acceptance of new technologies. Acceptance theory originated from the technology acceptance model (TAM), which was developed in [44] and was mainly used to predict and explain users’ acceptance of new technologies, with the core concept that acceptance was affected primarily by perceived usefulness and perceived ease of use, as shown in Figure 2a. Venkatesh and Davis [45] revised the initial TAM further to enhance the degree of explanation of the model. They found that behavioral intention was a better predictor of the use of new technology than attitudes toward usage. Therefore, they removed the attitude variable in the initial TAM and proposed the modified TAM, as shown in Figure 2b, below. Subsequently, Venkatesh and Davis [46] extended the modified TAM from the perspective of social influence and cognitive processes, and the extended model was referred to as TAM2. Next, Venkatesh et al. [47] integrated the Unified Theory of Acceptance and Use of Technology model (UTAUT), based on eight competing models and their different sets of acceptance determinants, which pioneered four key relationships and four moderators of key relationships. The significant factors in the four key relationships were Performance Expectancy, Effort Expectancy, Social Influence, and Facilitating Conditions. The four moderators used for the model path were Gender, Age, Experience, and Voluntariness of Use. Venkatesh and Bala [48] proposed the TAM3 to understand the interventions that managers could use in relation to the user acceptance of new technologies. Subsequently, Venkatesh et al. [49] further developed the UTAUT2 by incorporating the three constructs of hedonic motivation, price value, and habit into the UTAUT. Individual differences—namely, age, gender, and experience—were used to moderate the effects of constructs on behavioral intentions in UTAUT2. Through the continuous exploration of the technology acceptance model detailed above, the research constructs and scopes of the acceptance model have been expanded in different aspects, and the research theory of technology acceptance has also been developed fundamentally.
In this study, we chose the modified TAM model as the base model due to the fact that the modified TAM model is more concise and clearer than other theoretical models, and also because the modified TAM model facilitates the addition of new concepts related to relocation. Meanwhile, based on the performance expectation concept in the UTAUT, we developed the expectancy of saving on parking fees (EOPFS) concept to describe users’ expectations of saving on parking costs through relocation properties. The moderator variables in the UTAUT, gender, age, and experience, were used to moderate the effects of the constructs on behavioral intentions. In this model, experience includes driving experience and riding experience with autopilot.
Some emerging fields have also featured in-depth applications of technology acceptance models. These include the areas of innovative education [50], mobile payment [51], artificial intelligence [52], and automated driving [3,21]. One of the most striking developments is the application of acceptance modeling to automated driving. As early as 2004, Lee and See [53] started researching users’ attitudes towards automation. They proposed a new framework model to explore the dynamic process of users’ trust in automation regarding the environment, automation characteristics, and cognitive functions. Compared to the TAM, this model was a dynamic cyclic influencing model, and it was more complicated. However, Lee and See [53] only explored the influencing process and mechanism behind users’ trust in automation, and they did not examine the influencing factors in automation acceptance. Subsequently, Ghazizadeh et al. [54] proposed the automation acceptance model (AAM) based on the TAM and analyzed its influencing factors. They adapted some perspectives on information systems and cognitive engineering and emphasized the impact of trust, technological compatibility, and attitudes. The AAM model took an essential step in applying the TAM theory model. However, the model is yet to be empirically tested, and the model’s fit and explanatory power have not been validated and analyzed. Panagiotopoulos and Dimitrakopoulos [55] extended the original Technology Acceptance Model with an empirical study through a questionnaire, showing that perceived usefulness, perceived ease of use, perceived trust, and social influence were all behavioral intention predictors, as shown in Figure 2c. However, the fitness and validity of the model should have been reported in the text. Zhang et al. proposed more complex models based on the TAM [26,27]. They assessed the model’s fitness and validity in their studies and verified that trust, perceived risk, and social influence played essential roles in accepting AVs. However, they did not consider the impact of specific scenarios on AV acceptance. Few studies have investigated AV acceptance from the perspective of relocation, but we still found a recent work from Ye et al. [56], which mainly researched SAV acceptance regarding parking behavior. They established a comprehensive model based on the initial TAM, as shown in Figure 2d. Parking issues were considered as observed indicator variables in that study, but the authors did not consider the relocation-parking effects as constructs in an in-depth way. Additionally, the model’s reliability also needed to be empirically tested. In Table 1, we present earlier studies on automated vehicle acceptance from three perspectives: artificial intelligence factors, human factors, and economic factors. So far, studies related to connected and automated vehicles have mainly been conducted in developed countries. The differences in the perceptions of technology in traffic may depend on the culture and characteristics of the country. This study will mainly focus on the acceptance of CAVs among Chinese users.

Table 1.
Studies investigating factors affecting acceptance of automated vehicles.
Upon reviewing the earlier related works, we can conclude that there are still some gaps in the existing research. First, most of the studies above provide valuable insights from the perspectives of artificial intelligence factors, human factors, and socioeconomic factors, while few studies were carried out from the perspective of specific usage scenarios. Second, the explanatory power of some models has not been well documented. Most researchers only partially evaluated the measurement models and did not empirically test their reliability, validity, and fitness. Third, most past research focused on factors that influence acceptability, whereas there have been no investigations into the precise moderating impact of “riding experience with autopilot” on CAV acceptance. Additionally, few acceptance studies have been conducted on generational gaps.
Figure 2.
(a). Original TAM proposed by Davis et al. [44]. (b). Modified TAM proposed by Venkatesh and Davis [45]. (c). The model proposed by Panagiotopoulos and Dimitrakopoulos [55]. (d). The model proposed by Ye et al. [56].
2.2. Research Hypotheses and Model Development
As outlined above, in this study, we utilized the modified TAM [45] and the UTAUT [47] as the theoretical foundation to investigate CAV acceptance. We chose constructs like perceived usefulness, perceived ease of use, and behavioral intention from the TAM theory. We also decided on the construct of performance expectancy and moderating variables (gender and age) from the UTAUT theory. Meanwhile, we added four new constructs: initial trust, perceived convenience of relocation, perceived risk, and expectation of saving on parking fees, as well as moderating variables like driving experience, which are used to negotiate the paths of the model. In the following, we describe the meanings of different constructs and propose research hypotheses adapted from past studies.
2.2.1. Behavioral Intention
“Acceptance” was mainly used to predict and explain user acceptance in previous studies [44]. In this study, it primarily refers to users’ acceptance of using CAVs. According to the Theory of Rational Behavior [60], behavioral intentions effectively predict system usage [45], since a person’s behavior is mainly determined by behavioral intention. Therefore, this model uses behavioral intention (BI) as a dependent variable to predict users’ acceptance of using CAVs.
2.2.2. Perceived Usefulness and Perceived Ease of Use
According to Davis et al. [44], perceived usefulness (PU) is defined as the user’s perception of the extent to which using the system would improve their performance, and perceived ease of use (PEOU) means the user’s perception of the effort required to use the system. In this research context, perceived usefulness refers to the user’s perception that using CAVs will improve their traveling experience, and perceived ease of use means the user’s perception of the amount of work required to use CAVs. CAVs have been considered to have the following advantages: they can relieve traffic congestion, reduce energy consumption, and improve the value of time spent commuting [3,61]. At the same time, CAVs will bring a new driving experience that can alleviate human driving tasks and enhance the convenience of users’ travel [62]. Past studies [26,27,28] confirmed that PEOU had a positive effect on PU and BI, and that PU had a positive impact on BI in theoretical studies of AV acceptance. Therefore, in this study, we can also formulate hypotheses for the acceptability of CAVs as follows:
H1.
Perceived usefulness positively influences behavioral intention to use CAVs.
H2.
Perceived ease of use positively influences behavioral intention to use CAVs.
H3.
Perceived ease of use positively influences perceived usefulness.
2.2.3. Initial Trust in CAVs
The most common definition of trust was proposed by Lee and See [53], who contended that it is the attitude of an agent that will help to achieve personal goals in situations of uncertainty and vulnerability. Subsequently, Choi and Ji [28] defined trust as the degree of confidence in the predictability and functionality of a given system. One of the public’s most significant concerns regarding automated vehicles is over whether the AVs’ system functions will keep working regularly [63], which could be regarded as a trust issue. Trust includes initial trust, trust development, trust maintenance, and continuous trust [64]. McKnight et al. [65] defined initial trust as trust in an unfamiliar party. That is, initial trust implies that there is no previous experience between the parties. Respondents need to rely on secondary information and experience in other similar systems, contextual factors, or personal thoughts to determine their level of trust [66]. In the research context of this study, initial trust is used as a construct in the model to assess the acceptance of CAVs because Level 5 CAVs have not yet emerged.
There have been several papers related to the effect of initial trust on the acceptance of AVs [26,27,67], with Zhang et al. [26] proposing that initial trust was the most critical influencing factor. Kenesei et al. [67] further delved into portraying the impact of initial trust in AVs in three dimensions: trust in performance, trust in the manufacturer, and trust in the AVs’ management organization, which suggested a direct influence relationship between initial trust and behavioral intention. Meanwhile, there is also evidence to prove the influential relationships between trust, PU, and PEOU. A study by Choi and Ji [28] concluded that trust positively impacted PU, but the authors did not establish a connection between trust and PEOU. Another study, by Xu et al. [68], confirmed that trust positively affected both PU and PEOU. Therefore, it can be assumed that trust, PU, and PEOU would have mutual influences. Thus, we propose that:
H4.
Initial trust positively influences behavioral intention to use CAVs.
H5.
Initial trust positively influences perceived usefulness.
H6.
Initial trust positively influences perceived ease of use.
2.2.4. Perceived Convenience of Relocation
Connected and automated vehicles can solve the current thorny problem that it is not easy to find economical and convenient parking spaces in city centers [17]. Howard and Dai [63] suggested that for users, one of the most attractive features of automated vehicles was the convenience of not having to search for a parking space. Thus, we propose the concept of “perceived convenience of relocation” (PCOR) as one of the modeling concepts. The convenience of relocation will promote people’s willingness to use CAVs [17,38]. During the use process, the convenience of relocation can enhance the perceived usefulness and perceived ease of use.
Trust means “one’s willingness to place himself/herself in a vulnerable position, with respect to a technology (e.g., AV), with a positive expectation of an outcome or a positive nature of future behavior” [69]. Previous studies [37,41] related to CAVs led us to recognize that relocation makes users drive more by using CAVs. Several studies have also shown that users’ trust in autopilot systems depends on the perceived performance of these systems [70,71]. Meanwhile, higher levels of anthropomorphism performance can significantly improve trust development in complex systems like AI devices and robotics [72]. Therefore, we can assume that the perceived convenience of relocation promotes users’ initial trust in CAVs.
In addition, we also considered the positive influence of the perceived convenience of relocation on perceived usefulness through the mediating effect of initial trust and perceived ease of use. Therefore, it was hypothesized that:
H7.
The perceived convenience of relocationpositively influences behavioral intention to use CAVs.
H7a.
Initial trust and perceived ease of use play parallel mediating roles in the relationship between perceived convenience of relocation and perceived usefulness.
H8.
Perceived convenience of relocationpositively influences perceived usefulness.
H9.
Perceived convenience of relocationpositively influences perceived ease of use.
H10.
Perceived convenience of relocationpositively influences initial trust.
2.2.5. Perceived Risk
The introduction of CAVs has also aroused wide public concern about the risk problem [3,24,26,67]. The perceived risks mainly include safety risks and privacy risks, which were identified as the types of risk that are most likely to affect CAV adoption [26]. According to Bansal et al. [73], the safety risk was of most concern to respondents, and it was mainly related to equipment failure in automated vehicles. A study by Zhang et al. [26] showed that the public’s concern about the safety risk of AVs had already reached 3.82/5.00. In addition, the privacy risk is also noteworthy. CAVs may expose passengers to privacy risks because the device will constantly collect user information for system optimization [24]. The main focus is on the accessibility of information, the type of information collected, the duration of data storage, and the data that may be leaked to external networks [1]. Bansal et al. [73] have shown that 74% of respondents would be concerned about the hacking of their information system, and 70% would be worried about a privacy breach.
In previous studies, the causal relationship between trust and risk has resulted in conflicting views. Choi and Ji [28] argued that trust negatively affects perceived risk and, subsequently, that risk negatively affects behavioral intention. In contrast, some scholars [26,74] argued that perceived risk is a prerequisite for influencing public trust. Zhang et al. [26] argued that perceived risk negatively affects initial trust, but they did not consider the relationship between perceived risk and behavioral intention. Peng et al. [74] held that perceived risk harms behavioral intention and initial trust. In this study, we assume that risk has a negative impact on initial trust. Furthermore, some users were reluctant to use CAVs because they were concerned about risk, which indicates that risk may harm the behavioral intention to use. Because the relocation function can free users from the parking process of CAVs, which means that users no longer need to participate in the parking process of CAVs, we can assume that users’ concern about risks will promote the perceived convenience of relocation. Therefore, it can be assumed that perceived risk positively impacts the perceived convenience of relocation. In addition, we considered the positive impact of perceived risk on initial trust through the mediating effect of the perceived convenience of relocation. Therefore, the following hypotheses can be proposed:
H11.
Perceived risk negatively influences behavioral intention to use CAVs.
H12.
Perceived risk negatively influences initial trust.
H12a.
The perceived convenience of relocation exerts a mediating effect in the relationship between perceived risk and initial trust.
H13.
Perceived risk positively influences the perceived convenience of relocation.
2.2.6. Expectation of Saving on Parking Fees
Performance expectancy was defined in the UTAUT as the degree to which an individual perceives that using a system will help them improve their job performance [47]. In this study, performance expectancy is derived as the “expectation of saving on parking fees” (EOSPF) when using CAVs, which refers to the expectation that the user will save on parking fees by avoiding the high-priced parking lots in city centers and choosing cheaper parking lots through the relocation process of CAVs.
Most existing studies on CAV relocation mainly focus on parking planning [40,75] and its technical management [17,18,38,39], while fewer studies have been conducted to address the issue of parking-cost savings. Harper et al. [76] simulated the impacts of PAV cruising for cheaper parking, and they found that parking lot revenues would fall significantly as the PAV adoption rate rose. Moreover, PAVs would travel an additional 7.4–8.4 miles per day for economical parking spaces at high penetration rates (50–100%), which suggests that users are willing to use the relocation feature and drive longer distances to save on parking fees, which, in a way, promotes the use of AVs as well. Subsequently, Jia et al. [37] proposed a willingness-to-relocate (WTR) metric to measure how much time travelers were willing to spend on relocation to save USD 1 in parking costs. The results showed an increase in relocation, which also led to an increase in vacant vehicle traveling (VMT). The above illustrates that the expectation of users that they will save on parking fees leads to an increase in relocation, as well as an increase in the use of vehicles. In line with the above arguments, the following hypotheses are proposed:
H14.
EOSPF positively influences the perceived convenience of relocation.
H15.
EOSPF positively influences behavioral intention to use CAVs.
Based on the above hypotheses, a CAV acceptance model was constructed, as shown in Figure 3.
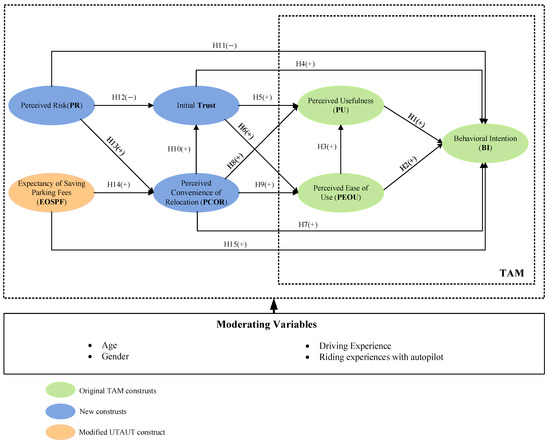
Figure 3.
The CAV acceptance model is proposed in this research. The small dashed box represents the modified TAM model. The large dashed box represents the novel acceptance model proposed in this study.
3. Methods
3.1. Survey Design
An online questionnaire was devised to collect data via Sojump [77], comprising four sections. Sojump [77] is a professional online questionnaire platform that can provide multifunctional and humanized online design questionnaires for data collection. Sojump has the advantages of being fast, easy to use, and low-cost, and many enterprises and research teams have used it. Respondents can open the questionnaire by scanning the QR code for Sojump on their cell phones and then filling out the questionnaire. In this study, the first part was an explanatory statement that introduced the motivation and research ethics of the survey and of CAVs. The second section assessed the participants’ attitudes through measurement scales. The third part featured questions about the respondents’ traveling information. The fourth section measured demographic characteristics, including age, gender, education, and monthly income. Research ethics in the first part was introduced as follows. First, our questionnaire guaranteed the confidentiality of the questionnaire data to the respondents at the beginning, and we also promised we would not disclose any personal privacy data. Second, we promised that this questionnaire would only be used for academic research, and that we would not use participants’ personal information for commercial purposes. Additionally, we ensured that the participation of the participants was voluntary, and participants can withdraw from the study at any time if they feel uncomfortable without any negative consequences.
The questionnaire was designed after an extensive literature review and adapted from validated measurement scales. Some measurement items were modified to reflect the specific CAV context and to fit our research scenario. After completing the preliminary questionnaire, we solicited reviews from two transportation experts, and two rounds of cognitive interviews were conducted with three graduate students and three office workers. Some ambiguous questions were modified according to the feedback. Finally, a questionnaire containing seven potential variables and 54 items was developed. Among them were 39 items for the measurement scale in Section 2 (as shown in Table 2), 8 travel information questions for part 3, and 7 socio-demographic attribute questions for part 4. The specific content of the measurement items is shown in Table 2. All items utilized a five-point Likert scale, ranging from “strongly disagree (=1)” to “strongly agree (=5)”. It takes about 5 min to complete the questionnaire.
Table 2.
Items used to measure the factors in the proposed model and the sources of the measurement.
3.2. Survey Procedure
3.2.1. Pre-Survey
We first conducted the pre-survey in April 2023 with an online survey questionnaire. A total of 158 valid responses were collected. We conducted the reliability tests, exploratory factor analysis, and confirmatory factor analysis. We obtained high computational results, which indicated that the questionnaire scale was highly reliable and could be used for formal research.
3.2.2. Formal Research Survey
The formal survey was conducted in May 2023 through online and field research. The field research was performed in Xuanwu District, Gulou District, and Jiangning District in Nanjing City for three days. The online research lasted 20 days, and we received questionnaires from different cities across China.
3.3. Demographics of Respondents
We obtained 801 responses in the formal survey, with no missing values. Next, we cleaned the unqualified responses. Those samples with incorrect answers to the lie detector question would be cleaned. The lie detector question set in the questionnaire was as follows: I have never used a cell phone. Questionnaires that came back YES would be deleted. Questionnaires that came back NO would be left. Because this questionnaire was filled out by scanning the QR code from a cell phone, each respondent filled out the questionnaire using a cell phone. Therefore, questionnaires that were answered YES were deleted. Furthermore, samples with significantly short response times (less than 100 s) were also removed. Hence, 83 invalid questionnaires were eliminated, and 717 valid questionnaires were obtained, with an effective rate of 89.63%. Table 3 summarizes the demographic characteristics of respondents. In total, 50.63% of the respondents were male, and 49.37% were female, which was essentially in line with the proportion of men (51.24%) and women (48.76%) in the National Population Census data [78]. The subgroup with the highest number was the Generation Z group (18–26 years old), followed by the Millennials group (27–42 years old) and the Generation X group (43–58 years old). The lowest number of respondents was in the Baby Boomers and Seniors group (over 59 years old). These data indicate that the Generation Z group was the most interested in the CAV acceptance survey, and that the Millennials group was also interested in this survey. In total, 88.15% of the respondents had a Bachelor’s degree or higher, and according to the National Census data [79], only 15% of the population have a college degree or higher, which indicates that the respondents who are interested in and willing to complete this questionnaire had a good education. Furthermore, 75.73% of the respondents had a driver’s license, while 24.27% did not have a driver’s license, which shows that most of the respondents had practical experience in handling vehicles.
Table 3.
Summary of demographic and driving-related information (n = 717).
3.4. Data Statistical Analysis
Structural equation modeling (SEM) was performed using IBM SPSS Statistics 25 and Amos 26 Graphics. The reasons for choosing SEM were as follows. SEM is a flexible and comprehensive causal model. It can set variable relationships based on theoretical knowledge, with almost no restrictions on variable relationships, and it can also deal with latent variables that are not readily observable. These points fitted well with the research conditions we needed for this study. Furthermore, SEM can deal with complex relationships between multi-indicator variables with co-existing direct and indirect effects, which also meets this study’s needs. In addition, SEM has multiple statistical assessment indicators, which enabled us to test the data quality from different perspectives, thus enhancing the credibility of the results. Additionally, SEM empirical research is suitable for extensive sample studies with sample sizes greater than 200, and the sample size should be at least ten times larger than the parameters to be estimated [80,81,82]. In this study, the estimated parameter size was seven, and the sample size was 717, which is suitable for choosing SEM. SEM has been proven effective in investigating the acceptance of various new technologies, including automated vehicles. The regression equations of SEM are shown below, where Equations (1) and (2) represent the measurement model, and Equation (3) represents the structural model [80,83].
where is a vector of exogenous observed variables, is a vector of endogenous observed variables, is a vector of factor loadings, is a vector of exogenous latent constructs, is a vector of endogenous latent constructs, and are vectors of measurement errors, and
where the endogenous latent construct is a function of the endogenous effects of mediating variables and the effects of the exogenous variables plus residual terms . The and are regression coefficients.
The data processing in this study mainly included the following steps. The reliability and validity of the measurement model were first tested, which included exploratory factor analysis and confirmatory factor analysis. The next step was hypothesis testing and structural analysis [81]. Subsequently, we conducted a mediation effects test using the bootstrapping method [84,85] to explore and explain the rationale behind the relationship and make the existing theory more systematic and complete. Finally, we conducted a multigroup analysis [86], assessing cross-group variability and explaining how the hypothesized relationships changed under the moderating effects of different variables.
4. Results
4.1. Descriptive Analysis
The respondents to the survey recognized the usefulness (mean = 3.98, SD = 0.74) and the ease of use of CAVs (mean = 3.74, SD = 0.78). The convenience of relocation was highly recognized by the respondents, with an average score of 4.16 (SD = 0.67), and it was acknowledged that the convenience of relocation would save on parking fees (Mean = 3.80, SD = 0.85). The respondents possessed a certain degree of trust in CAVs, with an average score of 3.65 (SD = 0.75), while the respondents perceived CAVs as having a higher level of risk, and their average score was 4.03 (SD = 0.85). The overall intention to use CAVs was relatively high because the average score was 3.79 (SD = 0.73). Therefore, the convenience of relocation was highly recognized, as its average value significantly exceeded the average value of other factors.
Notably, the Baby Boomers and Seniors group rated the perceived usefulness (mean = 4.10, SD = 0.40) and behavioral intention (mean = 3.98, SD = 0.43) significantly higher than the other age groups. In contrast, the perceived usefulness for Generation Z, Millennials, and Generation X was 3.88 (SD = 0.81), 3.86 (SD = 0.89), and 3.86 (SD = 0.72), respectively, and the behavioral intention was 3.74 (SD = 0.76), 3.83 (SD = 0.73), and 3.79 (SD = 0.56), respectively. From the gender perspective, the perceived usefulness was the same for males and females, at 3.87, but the males’ behavioral intention (mean = 3.80, SD = 0.72) was higher than that of the females (mean = 3.78, SD = 0.73). In this survey, the top two most commonly used travel modes for the respondents were subway (34.03%) and private vehicles (21.34%). In total, 13.81% of the respondents said they had never heard of CAVs before the survey, while 86.19% said they had heard of CAVs before the survey. Figure 4 demonstrates the sources through which the respondents obtained information about CAVs. The vast majority (89.00%) obtained information about CAVs from the internet.
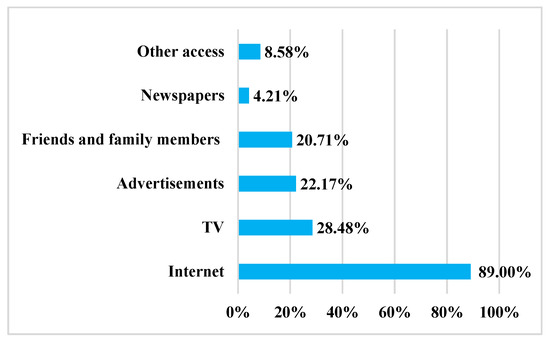
Figure 4.
Access to information about CAVs (n = 717).
4.2. Measurement Model Assessment
4.2.1. Reliability Analysis
First, it was necessary to perform the consistency test to verify the scale’s reliability. The Cronbach’s α coefficient was calculated based on 717 samples, as shown in Table 4. In the original measurement model, the factor loadings of PU2, PU3, PU4, PU5, PU7, PCOR7, PR4, and PR5 were all less than 0.6, so they were removed. It can be seen from Table 4 that the Cronbach’s α coefficients were all higher than 0.8, which indicates that the internal consistency was good and that the model had good reliability.
Table 4.
Cronbach’s α index, internal consistency, convergent validity, and internal consistency.
4.2.2. EFA and CFA
An exploratory factor analysis (EFA) was conducted by SPSS 25.0, and the KMO value was 0.928, which showed that the partial correlation between the variables was robust. Hence, they were very suitable for extracting information. The significance of the Bartlett sphericity test was 0.000, which indicated that the data were very significant. Therefore, the data were suitable for factor analysis. The factor loading values of the items listed in Table 4 were all higher than 0.6, which means that those items were significantly correlated with the measuring structure.
Next, a principal component extraction was performed, and the cumulative variance explanation rate of the seven latent variable factors reached 70.416%, demonstrating that the extracted seven factors can effectively explain the questionnaire information. From the factor loading matrix, as shown in Table 5, seven principal components were extracted, and their corresponding items were divided through clustering. Thus, the questionnaire had excellent structural validity. The confirmatory factor analysis (CFA) was performed by AMOS 26.0. The CR and AVE values met the standards of CR > 0.7 and AVE > 0.5, as shown in Table 4. They were consistent with the values suggested by Fornell et al. and Wu Minglong [80,87]. The goodness-of-fit indices met the suggested fit indices, as shown in Table 6, which revealed that the measurement model was a good fit. The results show high internal consistency and convergence validity among the measured items. The discriminative validity was tested, as shown in Table 7. The square root of AVE (SAVEs) for all seven constructs was more significant than any of the correlation coefficients between them, which meant that the discriminative validity met the criteria. Therefore, this model maintains a good fit, convergence validity, and discrimination validity. The goodness-of-fit index model met the suggested fit indices, as shown in Table 6, which reveals that the proposed model is in a good hypothesized relationship.
Table 5.
The matrix of factor loading after orthogonal rotation.
Table 6.
Model fit indices for the tested model.
Table 7.
Results of the discriminant validity test.
4.3. Structural Model Analysis
After assessing the measurement model, we assessed the hypotheses and structure model. Based on the previous hypotheses and model development, we estimated and tested the significance of the path coefficients by importing 717 valid sample data in AMOS 26.0. A summary of the standardized path coefficients (β) and hypothesis testing is shown in Table 8.
Table 8.
Summary of hypothesis testing.
From the analysis results that were output by AMOS 26.0, 12 of the 14 hypotheses constructed in this study were supported, while H7 “PCOR → BI”, H11 “PR → BI” and H15 “EOSPF → BI” were not, which indicates that the vast majority of the path relationships in the theoretical model constructed were verified. The path analysis results are shown in Figure 5, where the solid lines represent significant relationships, and the dashed lines represent non-significant relationships. The paths between the potential variables are marked with standardized path coefficients and significance levels.
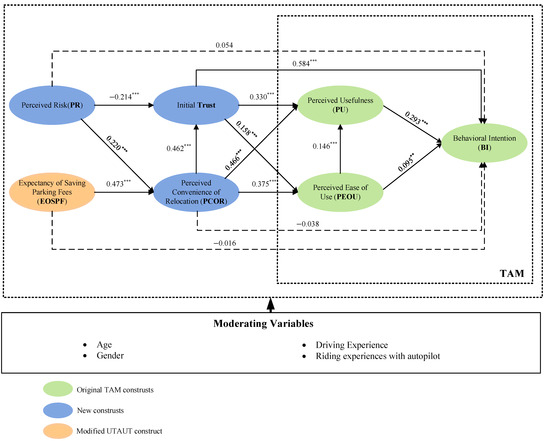
Figure 5.
Results of the structural model. Note: *** p < 0.001; ** p < 0.01. The small dashed box represents the modified TAM model. The large dashed box represents the novel acceptance model proposed in this study.
To be more specific, perceived usefulness (β = 0.293, p < 0.001), perceived ease of use (β = 0.095, p < 0.01), and initial trust (β = 0.584, p < 0.001) had significant positive effects on behavioral intention, and they were the key influences on the behavioral intention to use CAVs. Hypotheses H1, H2, and H4 were supported, respectively.
Perceived convenience of relocation (β = 0.466, p < 0.001), initial trust (β = 0.330, p < 0.001), and perceived ease of use (β = 0.146, p < 0.001) had significant positive effects on perceived usefulness. Hypotheses H3, H8, and H5 were supported, respectively.
Perceived convenience of relocation (β = 0.375, p < 0.001) and initial trust (β = 0.158, p < 0.001) had a significant positive effect on the perceived ease of use. Hypotheses H9 and H6 were supported, respectively.
Perceived convenience of relocation (β = 0.462, p < 0.001) had a significant positive effect on initial trust, while perceived risk (β = −0.214, p < 0.001) harmed initial trust. These two constructs are determinants of initial trust. Hypotheses H10 and H12 were supported, respectively.
Expectation of saving on parking fees (β = 0.473, p < 0.001) and perceived risk (β = 0.220, p < 0.001) were the two determinants of perceived convenience of relocation because they had significant positive effects on the perceived convenience of relocation. Hypotheses H13 and H14 were supported, respectively.
Furthermore, perceived convenience of relocation, perceived risk, and expectation of saving on parking fees were not directly related to the behavioral intention to use CAVs, which means that H7, H11, and H15 were not supported.
Therefore, the data in this study support hypotheses H1–H6, H8–H10, and H12–H14 and do not support hypotheses H7, H11, and H15.
4.4. Mediating Effect Tests
To further explore the influence mechanism between different constructs, a parallel mediating model, PCOR-Trust-PEOU-PU (H7a), and a simple mediating model, PR-PCOR-Trust (H12a), were constructed in this study. The mediating effect means a causal relationship between variables caused by the independent variable and results in a change in the dependent variable [88]. In this study, 5000 repeated sampling iterations were performed using the bootstrapping method [84], and a 95% bias-correction confidence level was adopted. This repetitive sampling method has statistically solid power, and the test results are consistent [89]. If the 95% confidence interval does not cover 0, the mediating effect is considered significant, and vice versa [90]. Calculations were performed, and we obtained the confidence intervals under the 95% confidence interval probability, as shown in Table 9, below. Since none of the confidence intervals covered 0, hypotheses H7a and H12a are valid, and the mediation effects are significant. Hence, both hypotheses H7a and H12a can be supported in this study.
Table 9.
Direct, indirect, and total effects of mediating models.
4.5. Multigroup Analysis
Multigroup analysis (MGA) was used to study the significant differences in CAV acceptance between different moderating variables, as it can explain whether a hypothetical relationship changes as the moderating variable changes. In previous studies, sociodemographic characteristics (i.e., age, gender, income level) and respondents’ experience were significant moderating variables [21,47]. In this study, we used two new moderating variables, “riding experience with autopilot and the most commonly used travel mode”, and the moderating variables that previous researchers have used, such as gender, age, monthly income, and driving experience.
Each moderating variable divided the data into two groups, as shown in Table 10. For instance, the respondents were divided into “Generation Z” and “pre-Generation Z” according to age. Generation Z refers to adults born between 1996 and 2012. They have grown up in an “always-on” technological environment [91], so they are called the “digital native generation”. Generation Z differs significantly in attitudes and lifestyles compared to previous generations; therefore, we can divide respondents into “Generation Z” and “pre-Generation Z”.
Table 10.
Division of groups.
Before running A multigroup analysis, it is necessary to calculate the model fitness and check the measurement invariance first [86]. Only the measurement invariance can be used to make reliable inferences from multigroup analyses [92]. The results of the fitness and invariance tests were obtained through the calculation of AMOS 26.0, presented in Table 11. The model fit met the requirements from this table. In an invariance test, we need to ensure that the fit of the model is consistent with the fit of the baseline model, which is unconstrained [81,86]. When the p-value exceeds 0.05, the model fits consistently with the baseline model and passes the invariance test. When the p-value is less than 0.05, the model works significantly differently from the baseline model. However, if the ∆CFI is not more than 0.01 simultaneously, the model does not change significantly from the baseline model, so it can still be considered invariant [86]. As shown in Table 11, the five groups of age, gender, driving experience, riding experience with autopilot, and monthly income all passed the invariance test, indicating that a further data analysis could be conducted. However, the group “the most commonly used travel mode” did not pass the invariance test, so it could not be analyzed further. Based on Amos 26.0, the path coefficients analysis table was obtained, as shown in Table 12. The significance of the z-score can used to determine the significant size of the hypothetical relationships [85]. Only statistically significant correlations are given in Table 12.
Table 11.
The measurement fitness and measurement invariance.
Table 12.
The results of multigroup analysis.
The gender factor significantly moderated H8 (PCOR → PU) and H9 (PCOR → PEOU). The positive effect of PCOR on PU and PEOU in the male group was more significant than in the female group.
For age, significant moderating effects were hypothesized for H8 (PCOR → PU), H9 (PCOR → PEOU), and H14 (EOSPF → PCOR). The positive impact of PCOR on PU and PEOU in the Pre-Generation Z group was more significant than in the Generation Z group. The positive effect of EOSPF on PCOR was more pronounced in the Generation Z group than in the Pre-Generation Z group.
Driving experience had a significant moderating effect on hypothesis H9 (PCOR → PEOU), with PCOR having a more powerful positive impact on PEOU in the “Yes” group than in the “No” group.
The moderating effect of “riding experience with autopilot” was significant for the hypothesized relationships of H8 (PCOR → PU), H9 (PCOR → PEOU), and H14 (EOSPF → PCOR). The positive effects of PCOR on PU and PEOU and the positive effect of EOSPF on PCOR were more significant in the “Yes” group than in the “No” group.
“Monthly income” had a significant moderating effect on the hypothesized relationship H14 (EOSPF → PCOR). However, the difference value between the two groups was only 0.002, so the moderating effect of “monthly income” was too small and can be ignored.
The fact that “the most commonly used travel mode” did not pass the invariance test indicated that “the most commonly used travel mode” did not affect the acceptance of CAVs in this study.
5. Discussion
5.1. User Acceptance and Its Contributing Factors
In this study, we investigated the human acceptance of CAVs and their contributing factors, mainly from the perspective of relocation. According to the descriptive analysis, the respondents seemed optimistic about behavioral intentions, averaging 3.79/5.00 (SD = 0.73). This is higher than the public behavioral intention in previous studies [26]. Furthermore, the respondents highly recognized the convenience of relocation (mean = 4.16/5.00, SD = 0.67) and generally had the expectation of saving on parking fees (mean = 3.80/5.00, SD = 0.85). The research findings are summarized below.
To begin with, the most critical factor contributing to human acceptance of CAVs was initial trust, followed by PU and PEOU, where the positive effect of initial trust on CAV acceptance (+0.584) was much more significant than the positive effect brought about by perceived usefulness and perceived ease of use (+0.388). Perceived usefulness and perceived ease of use positively influenced AVs in previous studies [27,28]. However, in this study, the direct influencing effect of initial trust on the acceptance of CAVs was the most important, which is consistent with the findings of Zhang et al. [26]. Meanwhile, the determinants of initial trust in this model are perceived convenience of relocation (PCOR) and perceived risk.
Second, the results of this paper show that perceived convenience of relocation (PCOR) can indirectly promote CAV acceptance through three determinants, initial trust, perceived usefulness, and perceived ease of use, which were not studied in previous acceptance papers. Some scholars have already found that CAV relocation induces a significant increase in vehicle miles of travel [17,37,38], which corresponds to our model’s finding that relocation promotes the use of CAVs. At the same time, the positive effect value of PCOR on initial trust (+0.462) exceeds the negative effect value of perceived risk on initial trust (−0.214), indicating that people pay more attention to the convenience of relocation compared to their concerns about risks. Therefore, compared with their fears about risks, people may care more about the convenience of relocation.
The third contribution of this study is its demonstration that the public’s expectation of saving on parking fees (EOSPF) promotes the perceived convenience of relocation (PCOR), which provides a theoretical basis for the hypothesis in previous studies. These studies [17,40,41] proposed the hypothesis that people would use relocation features more often due to their willingness to save on parking fees, but this idea lacked a theoretical basis. This study demonstrates that the public’s expectation of saving on parking fees will promote the public’s recognition of the convenience of relocation based on an adequate empirical analysis. Hence, this finding has important theoretical significance for studying CAV relocation issues.
Finally, this study reveals that perceived risk promotes the public’s recognition of the convenience of relocation and negatively affects initial trust. However, it is worth noting that this research did not find a significant direct effect of perceived risk on behavioral intention. There are still different views on the relationship between perceived risk and behavioral intention. Some authors have suggested that perceived risk does not significantly affect behavioral intention, since perceived risk can indirectly affect behavioral intention by negatively affecting initial trust [26,28]. Others have contended that perceived risk negatively affects behavioral intention, meaning that higher perceived risk leads to lower behavioral intention [3,32]. The present study shows that perceived risk does not significantly affect behavioral intention, which may be because the direct effects of perceived risk on PCOR and initial trust are taken into account in the model. Therefore, perceived risk can affect behavioral intention indirectly by influencing initial trust and PCOR. The authors of previous research [26] also concluded that perceived risk negatively impacts initial trust. However, the result that perceived risk has a significant positive effect on PCOR was not addressed in previous research, possibly because perceived risk leads the public to prefer the relocation-parking function to avoiding risk. This relationship still needs further in-depth study in the future.
5.2. Multigroup Analysis of Moderating Effects
Multigroup analysis is helpful in developing and enriching existing theories from different perspectives and broadening our in-depth understanding of CAV acceptance theory.
In this paper, we examined the moderating effects of socioeconomic attributes and travel characteristics on the acceptance model and found that socioeconomic attributes and travel characteristics mainly moderated the public acceptance model through the variables of perceived convenience of relocation and the expectation of saving on parking fees. The results suggest that the perceived convenience of relocation and the expectation of saving on parking fees have important moderating significance in the acceptance model. The specific conclusions are as follows.
This study demonstrates the significant roles of moderating variables “riding experience with autopilot” in CAV acceptance. The respondents with autopilot riding experience held that perceived convenience of relocation (PCOR) would have a more significant positive effect on perceived usefulness and ease of use. At the same time, they believed that the expectation of saving on parking fees would significantly contribute to the perceived convenience of relocation. Compared to the group with no autopilot experience, the group with autopilot riding experience suggested more significant approval of relocation and parking-fee savings. We can conclude that exploring the future parking infrastructure to match the relocation feature of CAVs and enable users to lower their parking fees is vital for the public, which is consistent with the views of some researchers [17,37,40] who have studied future parking facilities and management for CAVs in terms of parking-fee savings.
In line with previous findings [3,21], this study confirms that “gender”, “age”, and “driving experience” have significant moderating effects on CAV acceptance. The male group recognized the convenience of relocation and CAV acceptance more than the female group. According to the questionnaire results, the mean values of the behavioral intention to use CAVs for males and females were 3.80 and 3.78, respectively. Moreover, males are more likely than females to recognize the contribution of relocation to the usefulness and ease of use of CAVs. This finding has similarities with the view of Spurlock et al. [93], who found that females were less likely to accept automated vehicles than males. This phenomenon of gender differences was explained by Wang and Zhao [94], who held that females are more risk-averse than males. Second, the pre-Generation Z group valued the contribution of the perceived convenience of relocation more, while the Generation Z group valued the expectation of saving on parking fees more. These findings confirm the generational gaps in the acceptance of CAVs. Furthermore, the group with driving experience may have perceived a more significant positive impact of PCOR on PEOU than those without driving experience, which suggests that the group with driving experience valued the convenience of relocation more.
In addition, in this study, we found that “monthly income” and “the most commonly used travel mode” have little significant moderating effect on the acceptance model of CAVs, which is different from previous studies by Wu et al. [21]. The latter believed that monthly income would have a significant moderating effect on the acceptance model through social influence in Singapore. In order to explore the difference between the two studies, we would like to consider more socio-economic factors in acceptance models in the future. Regarding the moderating effect of “the most commonly used travel mode” on the acceptance of CAVs, there has been little research so far. In this study, there was no significant moderating effect of “the most commonly used travel mode” on the acceptance model, which indicates that the public may not differentiate in their acceptance of CAVs, depending on their daily traveling mode.
Of all the constructs in the model, the most significantly affected by the moderator variables are the perceived convenience of relocation and the expectation of saving parking fees. Regarding the perceived convenience of relocation, the male group, the pre-Generation Z group, the “experienced driver” group, and the “having riding experience with autopilot” group valued the convenience of relocation more. Regarding the expectation of saving money on parking, the Generation Z group and the “having riding experience with autopilot” group valued the expectation of saving on parking fees more.
In summary, the two factors of perceived convenience of relocation and expectation of saving on parking fees have a significant moderating effect on the human acceptance of CAVs in different groups, so it is necessary to address the issue of relocation and saving on parking fees with CAVs considering the effects of gender, age, driving experience, and experiences with assisted driving vehicles in the future. Such work will also be of great practical importance for accepting and operating CAVs.
5.3. Theoretical Implications
This study contributes to the following theoretical innovations. First, this study is an essential effort toward a deeper understanding of the public acceptance of CAVs and their influencing factors from the relocation perspective. The general CAV acceptance model was extended by including variables related to relocation (perceived convenience of relocation and expectation of saving on parking fees), which is a further contribution of this work in the area of theoretical implications. Next, this study reveals the internal mechanism of the influence of the perceived convenience of relocation on perceived usefulness, which completes the existing acceptance theory. Based on the parallel mediation PCOR-Trust-PEOU-PU, the perceived convenience of relocation can promote users’ initial trust and ease of use and positively affect perceived usefulness. This explains the internal mechanism of the influence of perceived convenience of relocation on perceived usefulness. Lastly, in this study, we found that a mechanism of effects between perceived risk, perceived convenience of relocation, and initial trust, which complements the existing acceptance theory. Based on the mediation PR-PCOR-Trust, this study confirms the negative effect of perceived risk on trust, the positive effect of PCOR on trust, and the positive effect of perceived risk on PCOR. In addition, the study illustrates that the negative effect of perceived risk on initial trust can be mediated and transmitted through PCOR.
5.4. Policy Implications
From a practical point of view, this study verifies the effects of relocation features on enhancing CAV acceptance. It confirmed the positive effects of users’ expectations of saving on parking fees on the convenience of relocation and the indirect positive effect of the convenience of relocation on acceptance, especially given the moderating effects of parking fees, as we concluded above. Therefore, novel CAV parking infrastructures could be planned in years to come to provide more cost-effective parking lots, which would also indirectly improve the usage of CAVs.
Second, in this study, we found that initial trust has the most crucial significant effect on users’ behavioral intention to use CAVs, so enhancing people’s trust in CAVs will be an essential foundation for the promotion of CAVs. Considering that the convenience of relocation and perceived risk are determinants of initial trust, the relevant departments may attempt to enhance the convenience of relocation and reduce the risk of using CAVs, which would enhance the public’s initial trust in CAVs and, thus, improve the acceptance of CAVs. Given that people with autopilot riding experience have higher levels of acceptance of CAVs, CAV publicity and trial operations would be essential in the early stage. The relevant institutions could attract more people to enter into contact with CAVs and test-drive vehicles with automated driving functions. For instance, Baidu has launched the trial promotion of an automated mobility service, Apollo Robotaxi, in Shanghai, dramatically improving public understanding and acceptance of AVs.
Furthermore, due to the fact that females were less likely to accept CAVs than males, we believe that taking females’ conservative attitudes to risk into account at the stages of design and operation would contribute to the future market expansion of CAVs.
Finally, we found that the younger and senior generations were more interested in CAVs. In total, 47.28% of the respondents willing to complete the questionnaire were Generation Z, which is consistent with the media report that “Post-95s will become the main force of smart connected vehicles’ consumption” [95]. Based on the descriptive analysis, the perceived usefulness and behavioral intention to use CAVs were significantly higher in the Baby Boomers and the Seniors group than in the other age groups, which indicates a higher acceptance for CAVs in the older age groups. This finding echoes the view of Robert et al., who argued that automated vehicles could provide freedom and independence beyond any other mode of transportation, which will exactly meet the demands of seniors [96]. This is a signal that young people and seniors might contribute significantly to the CAV market in the future. Therefore, the views and demands of the young and seniors should be emphasized in the CAV launch process. According to the 2020 Automated Vehicles Readiness Index, published by KPMG [97], the development of CAVs still requires further advancements. This study would be conducive to the development of CAVs.
6. Conclusions, Limitations, and Future Work
In this study, we introduced and validated an extended TAM-UTAUT acceptance model incorporating the relocation feature of Connected and Automated Vehicles (CAVs). We endeavored to comprehend human acceptance through the lens of a relocation scenario. The explanatory capability of this model proved to be robust, yielding valuable insights across four dimensions, as mentioned in Section 5. Within the scope of this study, the relocation feature does not directly influence human acceptance but indirectly increases human acceptance through initial trust, PU, and PEOU, which are three fundamental determinants of human acceptance. Concurrently, the public’s expectation of cost savings in parking fees heightens the recognition of the convenience associated with relocation. Additionally, distinct demographic groups demonstrate varying levels of significance in their perceptions of the relocation feature. Specifically, males, individuals from the “pre-Generation Z” cohort, those with driving experience, and individuals with riding experience using autopilot assign heightened importance to the positive influence of relocation on acceptance. Furthermore, Generation Z individuals and those with riding experience using autopilot prioritize the positive impact of cost savings in parking fees on the perceived convenience of relocation. However, monthly income and the most commonly used travel mode exhibited almost negligible moderating effects on the CAV acceptance model.
The survey results above provide valuable insights into the contemporary perceptions of Chinese users. These perceptions are subject to evolution with increased public knowledge acquisition regarding CAVs technology. Accurate descriptions of current CAV technology and attention to the safety concerns expressed by respondents are crucial; otherwise, vehicle accidents may result [24] and, thus, exacerbate users’ anxiety about CAVs, which may potentially impede the widespread adoption of CAVs [15].
Several limitations need consideration when interpreting the findings of this study. In the first place, the research data are hypothetical and cross-sectional due to the use of stated preference surveys. This limitation arose from the fact that the mass market primarily features Level 2 CAVs, while Level 5 CAVs are not yet available. In the future, upon the marketization of Level 5 CAVs, a longitudinal panel survey employing the revealed preference survey methodology could be undertaken to scrutinize the evolving human acceptance of CAVs. Additionally, the perceived-risk assessment in this study does not encompass risk factors associated with parking lots, necessitating the inclusion of parking risks in future investigations [98]. Furthermore, in this study, we predominantly explored constructs like initial trust, PU, PEOU, PCOR, EOSPF, and perceived risks. Subsequent research should delve into the impact of other factors, including social influence, hedonic motivation, and the value of travel time. In addition, relocation could also be studied as a moderating variable in future research. In conclusion, this study represents a significant endeavor in comprehending CAV acceptance from a relocation perspective. The contributions and implications of this research are poised to facilitate the future diffusion of CAVs and their parking management, ultimately enhancing mobility, convenience, and equity for the public.
Author Contributions
Y.Z.: investigation, conceptualization, data curation, methodology, software, visualization, writing—original draft, review and editing. C.Z.: conceptualization, funding acquisition, project administration, data curation, methodology, validation, writing—review and editing. J.C.: supervision, funding acquisition, project administration, data curation, validation, writing—review and editing. G.Y.: conceptualization, data curation, methodology, writing—review and editing. W.W.: conceptualization, writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (grant no. 52302388), the Natural Science Foundation of Jiangsu Province (BK20230853), and the Fundamental Research Funds for the Central Universities.
Data Availability Statement
Data is unavailable due to privacy and ethical restrictions.
Acknowledgments
The authors would like to acknowledge the professional suggestions of anony-mous reviewers. The authors also appreciate the time and effort all editors have put into this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Morris, D.; Madzudzo, G.; Garcia-Perez, A. Cybersecurity threats in the auto industry: Tensions in the knowledge environment. Technol. Forecast. Soc. Change 2020, 157, 120102. [Google Scholar] [CrossRef]
- S&P The Future of Mobility. Available online: https://www.spglobal.com/mobility/en/topic/the-future-of-mobility.html (accessed on 5 May 2024).
- Zou, X.; Logan, D.B.; Vu, H.L. Modeling public acceptance of private autonomous vehicles: Value of time and motion sickness viewpoints. Transp. Res. Part C Emerg. Technol. 2022, 137, 103548. [Google Scholar] [CrossRef]
- SAE Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 30 April 2024).
- Deichmann, J.; Ebel, E.; Heineke, K.; Heuss, R.; Kellner, M.; Steiner, F. Autonomous Driving’s Future: Convenient and Connected; McKinsey Center for Future Mobility: Stuttgart, German, 2023. [Google Scholar]
- Ban, X.; Yang, D.; Wang, J.; Hamdar, S. Editorial: Connected and automated vehicles (CAV) based traffic-vehicle control. Transp. Res. Part C Emerg. Technol. 2020, 112, 116–119. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Richter, A.; Löwner, M.-O.; Ebendt, R.; Scholz, M. Towards an integrated urban development considering novel intelligent transportation systems: Urban Development Considering Novel Transport. Technol. Forecast. Soc. Change 2020, 155, 119970. [Google Scholar] [CrossRef]
- Jun, W.K.; An, M.H.; Choi, J.Y. Impact of the connected & autonomous vehicle industry on the Korean national economy using input-output analysis. Technol. Forecast. Soc. Change 2022, 178, 121572. [Google Scholar] [CrossRef]
- Su, Y.-S.; Huang, H.; Daim, T.; Chien, P.-W.; Peng, R.-L.; Karaman Akgul, A. Assessing the technological trajectory of 5G-V2X autonomous driving inventions: Use of patent analysis. Technol. Forecast. Soc. Change 2023, 196, 122817. [Google Scholar] [CrossRef]
- Daniel Holland-Letz, M.K.; Kloss, B.; Müller, T. Mobility’s Future: An Investment Reality Check 2021. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/mobilitys-future-an-investment-reality-check (accessed on 21 April 2024).
- Zhang, Y. China’s First Holographic Sensing Highway has Opened. Available online: http://finance.people.com.cn/n1/2023/1024/c1004-40102112.html (accessed on 24 October 2023).
- S&P Global Mobility. Autonomous Vehicles Special Report; S&P Global: Hong Kong SAR, China, 2022. [Google Scholar]
- Bridgelall, R.; Stubbing, E. Forecasting the effects of autonomous vehicles on land use. Technol. Forecast. Soc. Change 2021, 163, 120444. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Jiang, L.; Chen, H.; Paschalidis, E. Diffusion of connected and autonomous vehicles concerning mode choice, policy interventions and sustainability impacts: A system dynamics modelling study. Transp. Policy 2023, 141, 274–290. [Google Scholar] [CrossRef]
- Levin, M.; Wong, E.; Nault-Maurer, B.; Khani, A. Parking infrastructure design for repositioning autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2020, 120, 102838. [Google Scholar] [CrossRef]
- Wang, S.; Levin, M.W.; Caverly, R.J. Optimal parking management of connected autonomous vehicles: A control-theoretic approach. Transp. Res. Part C Emerg. Technol. 2021, 124, 102924. [Google Scholar] [CrossRef]
- Kacperski, C.; Vogel, T.; Kutzner, F. Ambivalence in Stakeholders’ Views on Connected and Autonomous Vehicles. In HCI in Mobility, Transport, and Automotive Systems. Automated Driving and In-Vehicle Experience Design; Krömker, H., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 46–57. [Google Scholar]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Wu, M.; Wang, N.; Yuen, K.F. Can autonomy level and anthropomorphic characteristics affect public acceptance and trust towards shared autonomous vehicles? Technol. Forecast. Soc. Change 2023, 189, 122384. [Google Scholar] [CrossRef]
- Xing, Y.; Zhou, H.; Han, X.; Zhang, M.; Lu, J. What influences vulnerable road users’ perceptions of autonomous vehicles? A comparative analysis of the 2017 and 2019 Pittsburgh surveys. Technol. Forecast. Soc. Change 2022, 176, 121454. [Google Scholar] [CrossRef]
- Lee, D.; Hess, D.J. Public concerns and connected and automated vehicles: Safety, privacy, and data security. Humanit. Soc. Sci. Commun. 2022, 9, 90. [Google Scholar] [CrossRef]
- Qian, L.; Yin, J.; Huang, Y.; Liang, Y. The role of values and ethics in influencing consumers’ intention to use autonomous vehicle hailing services. Technol. Forecast. Soc. Change 2023, 188, 122267. [Google Scholar] [CrossRef]
- Clemens, K. Autonomous Vehicles: Where Are We Today? Available online: https://eepower.com/market-insights/autonomous-vehicles-where-are-we-today/# (accessed on 3 October 2023).
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. –Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.-A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef]
- Kacperski, C.; Kutzner, F.; Vogel, T. Consequences of autonomous vehicles: Ambivalent expectations and their impact on acceptance. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 282–294. [Google Scholar] [CrossRef]
- Duboz, A.; Mourtzouchou, A.; Grosso, M.; Kolarova, V.; Cordera, R.; Nägele, S.; Alonso Raposo, M.; Krause, J.; Garus, A.; Eisenmann, C.; et al. Exploring the acceptance of connected and automated vehicles: Focus group discussions with experts and non-experts in transport. Transp. Res. Part F Traffic Psychol. Behav. 2022, 89, 200–221. [Google Scholar] [CrossRef]
- Kapser, S.; Abdelrahman, M. Acceptance of autonomous delivery vehicles for last-mile delivery in Germany—Extending UTAUT2 with risk perceptions. Transp. Res. Part C Emerg. Technol. 2020, 111, 210–225. [Google Scholar] [CrossRef]
- Shen, Y.; Wu, Y.; Yao, B. Research on Heterogeneous Traveler Travel Mode Choices with Differences under a Mixed Traffic Environment. Sensors 2023, 23, 6091. [Google Scholar] [CrossRef]
- Yoganathan, V.; Osburg, V.-S. Heterogenous evaluations of autonomous vehicle services: An extended theoretical framework and empirical evidence. Technol. Forecast. Soc. Change 2024, 198, 122952. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, T.; Ma, L. Human acceptance of autonomous vehicles: Research status and prospects. Int. J. Ind. Ergon. 2023, 95, 103458. [Google Scholar] [CrossRef]
- Tang, P.; Sun, X.; Cao, S. Investigating user activities and the corresponding requirements for information and functions in autonomous vehicles of the future. Int. J. Ind. Ergon. 2020, 80, 103044. [Google Scholar] [CrossRef]
- Jia, W.; Donna Chen, T.; Zhang, W. Willingness-to-relocate: Examining preferences for parking relocation of privately-owned automated vehicles. Transp. Res. Part D Transp. Environ. 2022, 108, 103318. [Google Scholar] [CrossRef]
- Radvand, T.; Bahrami, S.; Yin, Y.; Laberteaux, K. Curbing cruising-as-substitution-for-parking in automated mobility. Transp. Res. Part C Emerg. Technol. 2022, 143, 103853. [Google Scholar] [CrossRef]
- Bahrami, S.; Vignon, D.; Yin, Y.; Laberteaux, K. Parking management of automated vehicles in downtown areas. Transp. Res. Part C Emerg. Technol. 2021, 126, 103001. [Google Scholar] [CrossRef]
- Kang, D.; Hu, F.; Levin, M.W. Impact of automated vehicles on traffic assignment, mode split, and parking behavior. Transp. Res. Part D Transp. Environ. 2022, 104, 103200. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, K. Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta. Land Use Policy 2020, 91, 103963. [Google Scholar] [CrossRef]
- Kersten Heineke, R.H.; Kelkar, A.; Kellner, M. What’s Next for Autonomous Vehicles? Available online: https://www.mckinsey.com/features/mckinsey-center-for-future-mobility/our-insights/whats-next-for-autonomous-vehicles (accessed on 1 December 2021).
- MoIIT Notice on the Pilot Work of “Vehicle-Road-Cloud Integration” application of Connected and Automated Vehicles. Available online: https://www.miit.gov.cn/jgsj/zbys/wjfb/art/2024/art_140d86b63e494628ae039dd23a3cc539.html (accessed on 17 January 2024).
- Davis, F.; Bagozzi, R.; Warshaw, P. User Acceptance of Computer Technology: A Comparison of Two Theoretical Models. Manag. Sci. 1989, 35, 982–1003. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.D. A Model of the Antecedents of Perceived Ease of Use: Development and Test. Decis. Sci. 1996, 27, 451–481. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.; Davis, G.; Davis, F. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Venkatesh, V.; Bala, H. Technology Acceptance Model 3 and a Research Agenda on Interventions. Decis. Sci. 2008, 39, 273–315. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.; Xu, X. Consumer Acceptance and Use of Information Technology: Extending the Unified Theory of Acceptance and Use of Technology. MIS Q. 2012, 36, 157–178. [Google Scholar] [CrossRef]
- Ahmad, S.; Mohd Noor, A.S.; Alwan, A.A.; Gulzar, Y.; Khan, W.Z.; Reegu, F.A. eLearning Acceptance and Adoption Challenges in Higher Education. Sustainability 2023, 15(7), 6190. [Google Scholar] [CrossRef]
- Bakar, F. E-Wallet Usage to Pay Zakat During Covid-19 Pandemic Among Malaysian’s Polytechnic Lecturers. Int. J. Islam. Econ. Financ. Res. 2022, 5, 57–79. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, X.; Li, H.; Yoo, C.; Pan, Y. Is Everyone an Artist? A Study on User Experience of AI-Based Painting System. Appl. Sci. 2023, 13, 6496. [Google Scholar] [CrossRef]
- Lee, J.; See, K. Trust in Automation: Designing for Appropriate Reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef]
- Ghazizadeh, M.; Lee, J.; Boyle, L. Extending the Technology Acceptance Model to assess automation. Cogn. Technol. Work. 2012, 14, 39–49. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Ye, X.; Sui, X.; Tao, W.; Yan, X.; Chen, J. Research on parking choice behavior of shared autonomous vehicle services by measuring users’ intention of usage. Transp. Res. Part F Traffic Psychol. Behav. 2022, 88, 81–98. [Google Scholar] [CrossRef]
- Ribeiro, M.A.; Gursoy, D.; Chi, O.H. Customer Acceptance of Autonomous Vehicles in Travel and Tourism. J. Travel Res. 2022, 61, 620–636. [Google Scholar] [CrossRef]
- Curtale, R.; Liao, F.; Rebalski, E. Transitional behavioral intention to use autonomous electric car-sharing services: Evidence from four European countries. Transp. Res. Part C Emerg. Technol. 2022, 135, 103516. [Google Scholar] [CrossRef]
- Zefreh, M.M.; Edries, B.; Esztergár-Kiss, D.; Torok, A. Intention to use private autonomous vehicles in developed and developing countries: What are the differences among the influential factors, mediators, and moderators? Travel Behav. Soc. 2023, 32, 100592. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I.; Belief, A. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research. Contemp. Sociol. 1977, 6, 244–245. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public Perceptions of Self-Driving Cars: The Case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 12–14 January 2014. [Google Scholar]
- Aityoussef, A.; Belhcen, L. A predictive model of building initial trust in sharing economy: Multi-Dimensional analysis of facebook users in Morocco. Technol. Soc. 2022, 71, 102111. [Google Scholar] [CrossRef]
- McKnight, D.; Cummings, L.; Chervany, N. Initial Trust Formation in New Organizational Relationships. Acad. Manag. Rev. 1998, 23, 473–490. [Google Scholar] [CrossRef]
- Li, X.; Hess, T.; Valacich, J. Why do we trust new technology? A study of initial trust formation with organizational information systems. J. Strategic Inf. Sys. 2008, 17, 39–71. [Google Scholar] [CrossRef]
- Kenesei, Z.; Ásványi, K.; Kökény, L.; Jászberényi, M.; Miskolczi, M.; Gyulavári, T.; Syahrivar, J. Trust and perceived risk: How different manifestations affect the adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2022, 164, 379–393. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Mayer, R.C.; Davis, J.H.; Schoorman, F.D. An Integrative Model Of Organizational Trust. Acad. Manag. Rev. 1995, 20, 709–734. [Google Scholar] [CrossRef]
- Maltz, M.; Sun, H.; Wu, Q.; Mourant, R. In-Vehicle Alerting System for Older and Younger Drivers: Does Experience Count? Transp. Res. Rec. 2004, 1899, 64–70. [Google Scholar] [CrossRef]
- Moray, N.; Inagaki, T.; Itoh, M. E Adaptive Automation, Trust, and Self-Confidence in Fault Management of Time-Critical Tasks. J. Exp. Psychol. Appl. 2000, 6, 44–58. [Google Scholar] [CrossRef]
- Lu, L.; Cai, R.; Gursoy, D. Developing and validating a service robot integration willingness scale. Int. J. Hosp. Manag. 2019, 80, 36–51. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Peng, J.; Wang, B.; Cai, Y.; Wang, B.; Huang, J.; Yang, C.; Jiang, C. What is the public really concerned about the AV crash? Insights from a combined analysis of social media and questionnaire survey. Technol. Forecast. Soc. Change 2023, 189, 122371. [Google Scholar] [CrossRef]
- Moore, M.A.; Lavieri, P.S.; Dias, F.F.; Bhat, C.R. On investigating the potential effects of private autonomous vehicle use on home/work relocations and commute times. Transp. Res. Part C Emerg. Technol. 2020, 110, 166–185. [Google Scholar] [CrossRef]
- Harper, C.; Hendrickson, C.; Samaras, C. Exploring the Economic, Environmental, and Travel Implications of Changes in Parking Choices due to Driverless Vehicles: An Agent-Based Simulation Approach. J. Urban Plan. Dev. 2018, 14, e04018043. [Google Scholar] [CrossRef]
- Corp. S. Homepage. Available online: https://www.wjx.cn/ (accessed on 11 November 2006).
- NBoS Seventh National Population Census (No.4). Available online: http://www.stats.gov.cn/sj/zxfb/202302/t20230203_1901084.html (accessed on 11 May 2021).
- NBoS Seventh National Population Census (No.6). Available online: http://www.stats.gov.cn/xxgk/sjfb/zxfb2020/202105/t20210511_1817201.html (accessed on 11 May 2021).
- Wu, M. Structural Equation Modeling: Operation and Application of AMOS.; Chongqing University Press: Chongqing, China, 2009. [Google Scholar]
- Wu, M. Structural Equation Modeling: Amos Practical Progression; Chongqing University Press: Chongqing, China, 2013. [Google Scholar]
- Xiaoping Chen, W.S. Empirical Methods in Organization and Management Research, 3rd ed.; Peking University Press: Beijing, China, 2018. [Google Scholar]
- Bollen, K.A. Structural Equations with Latent Variables; John Wiley & Sons.: Hoboken, NJ, USA, 1989. [Google Scholar]
- Preacher, K.; Hayes, A. Asymptotic and Resampling Strategies for Assessing and Comparing Indirect Effects in Multiple Mediator Models. Behav. Res. Methods 2008, 40, 879–891. [Google Scholar] [CrossRef] [PubMed]
- Gaskin, J. Structural Equation Modeling. Available online: http://statwiki.gaskination.com (accessed on 8 April 2021).
- Byrne, B.M. Structural Equation Modeling with Amos: Basic Concepts, Applications, and Programming, 3rd ed.; Routledge, Taylor & Francis Group: New York, NY, USA, 2016. [Google Scholar]
- Fornell, C.; Larcker, D. Evaluating Structural Equation Models with Unobservable Variables and Measurement Error. J. Mark. Res. 1981, 24, 337–346. [Google Scholar] [CrossRef]
- Kenny, D.A.; Kashy, D.A.; Bolger, N. Data analysis in social psychology. In The handbook of Social Psychology, 4th ed.; McGraw-Hill: New York, NY, USA, 1998; Volume 1. [Google Scholar]
- Malhotra, M.; Singhal, C.; Shang, G.; Ployhart, R. A Critical Evaluation of Alternative Methods and Paradigms for Conducting Mediation Analysis in Operations Management Research. J. Oper. Manag. 2014, 32, 127–137. [Google Scholar] [CrossRef]
- Zhao, X.; Lynch, J.; Chen, Q. Reconsidering Baron and Kenny: Myths and truths about mediation analysis. J. Consum. Res. 2010, 37, 197–206. [Google Scholar] [CrossRef]
- Chen, X.; Li, T.; Yuan, Q. Impacts of built environment on travel behaviors of Generation Z: A longitudinal perspective. Transportation 2023, 50, 407–436. [Google Scholar] [CrossRef]
- Hsiao, Y.-Y.; Lai, M. The Impact of Partial Measurement Invariance on Testing Moderation for Single and Multi-Level Data. Front. Psychol. 2018, 9, 740. [Google Scholar] [CrossRef]
- Spurlock, C.; Sears, J.; Wong-Parodi, G.; Walker, V.; Jin, L.; Taylor, M.; Duvall, A.; Gopal, A.; Todd, A. Describing the users: Understanding adoption of and interest in shared, electrified, and automated transportation in the San Francisco Bay Area. Transp. Res. Part D Transp. Environ. 2019, 71, 283–301. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J. Risk Preference and Adoption of Autonomous Vehicles. Transp. Res. Part A Policy Pract. 2019, 126. [Google Scholar] [CrossRef]
- Song, Y. The Post-1995 Generation will Become the Main Force of CAVs Consumption. Available online: https://auto.cctv.com/2022/09/23/ARTIGjZodrCoOnQsdk9tqvpW220923.shtml (accessed on 23 September 2022).
- Moser, R. How Self-Driving Cars Can Empower a Growing Population of Older Adults. Available online: https://generations.asaging.org/how-self-driving-cars-can-empower-older-adults (accessed on 1 June 2021).
- Threlfall, R. Autonomous Vehicles Readiness Index; Klynveld Peat Marwick Goerdeler (KPMG) International: Amstelveen, The Netherlands, 2020. [Google Scholar]
- Yang, G.; Caiati, V.; Rasouli, S.; Chen, J. Understanding Drivers’ Behavioral attitudes and Intentions to Use Guidance Systems in Urban Complex Parking Lots Based on the C-TAM-TPB Framework. Transp. Res. Rec. ahead of print. 2024. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).