A Self-Powered Six-Axis Tactile Sensor by Using Triboelectric Mechanism

 ,
, 



Abstract

1. Introduction
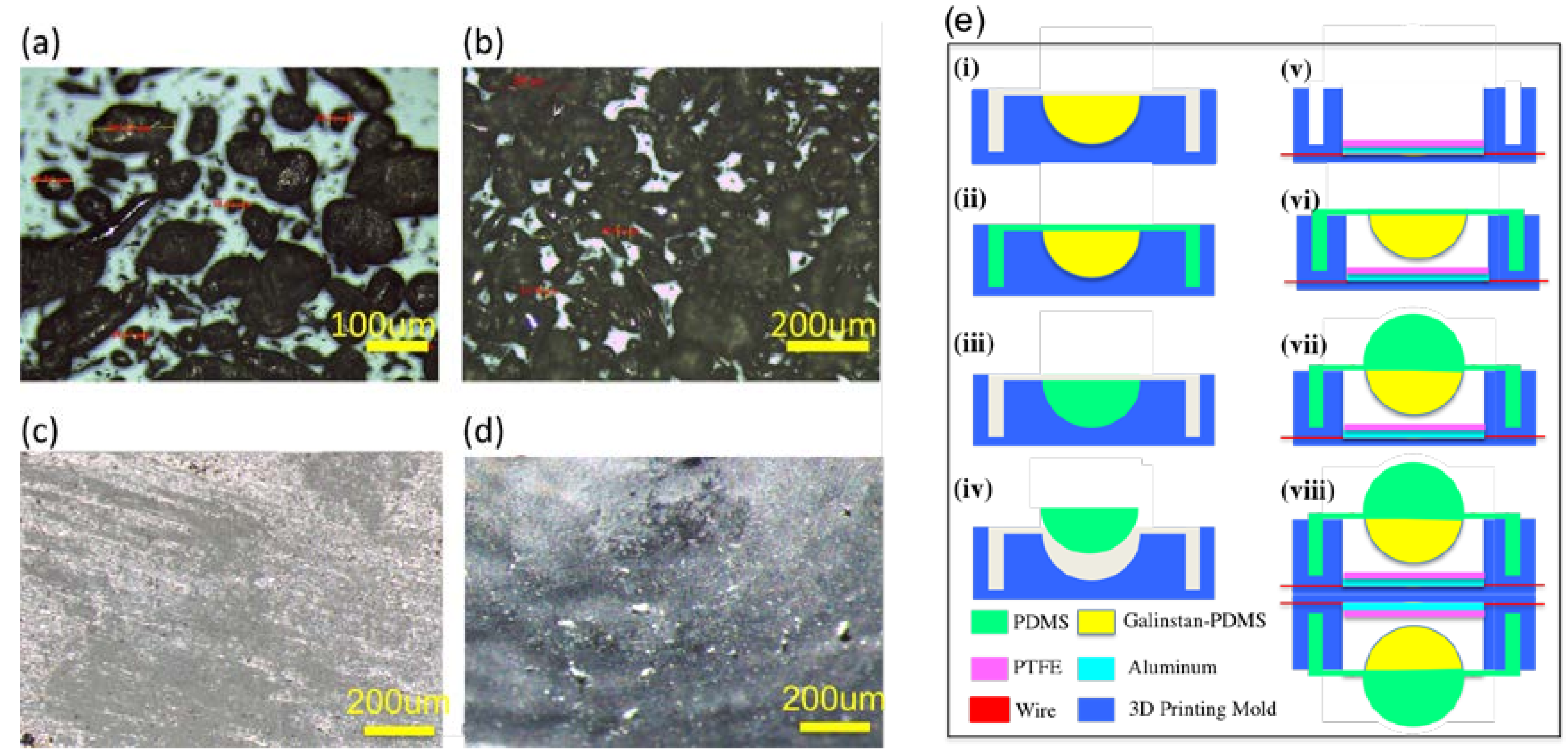
2. Materials and Methods
3. Results and Discussions
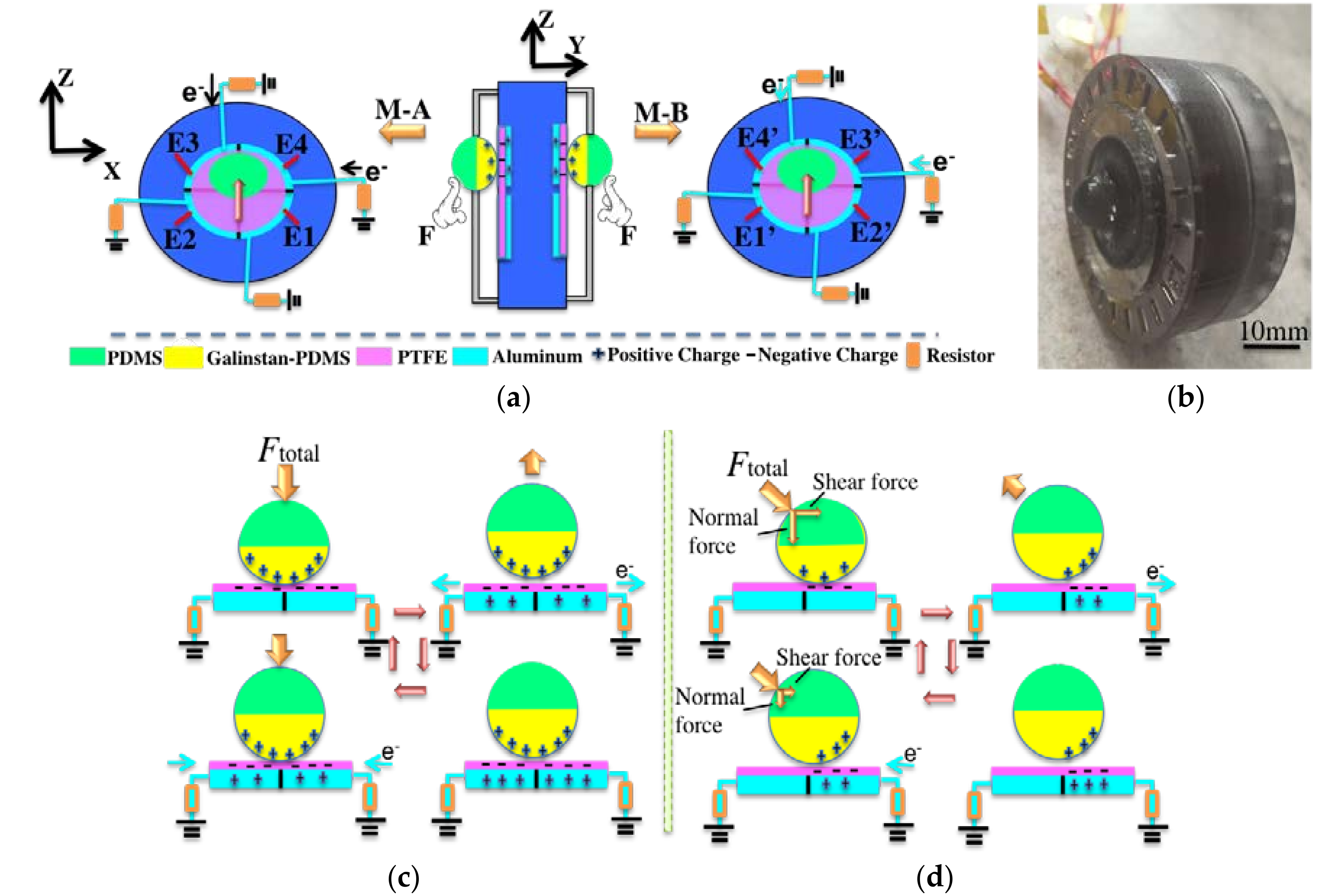
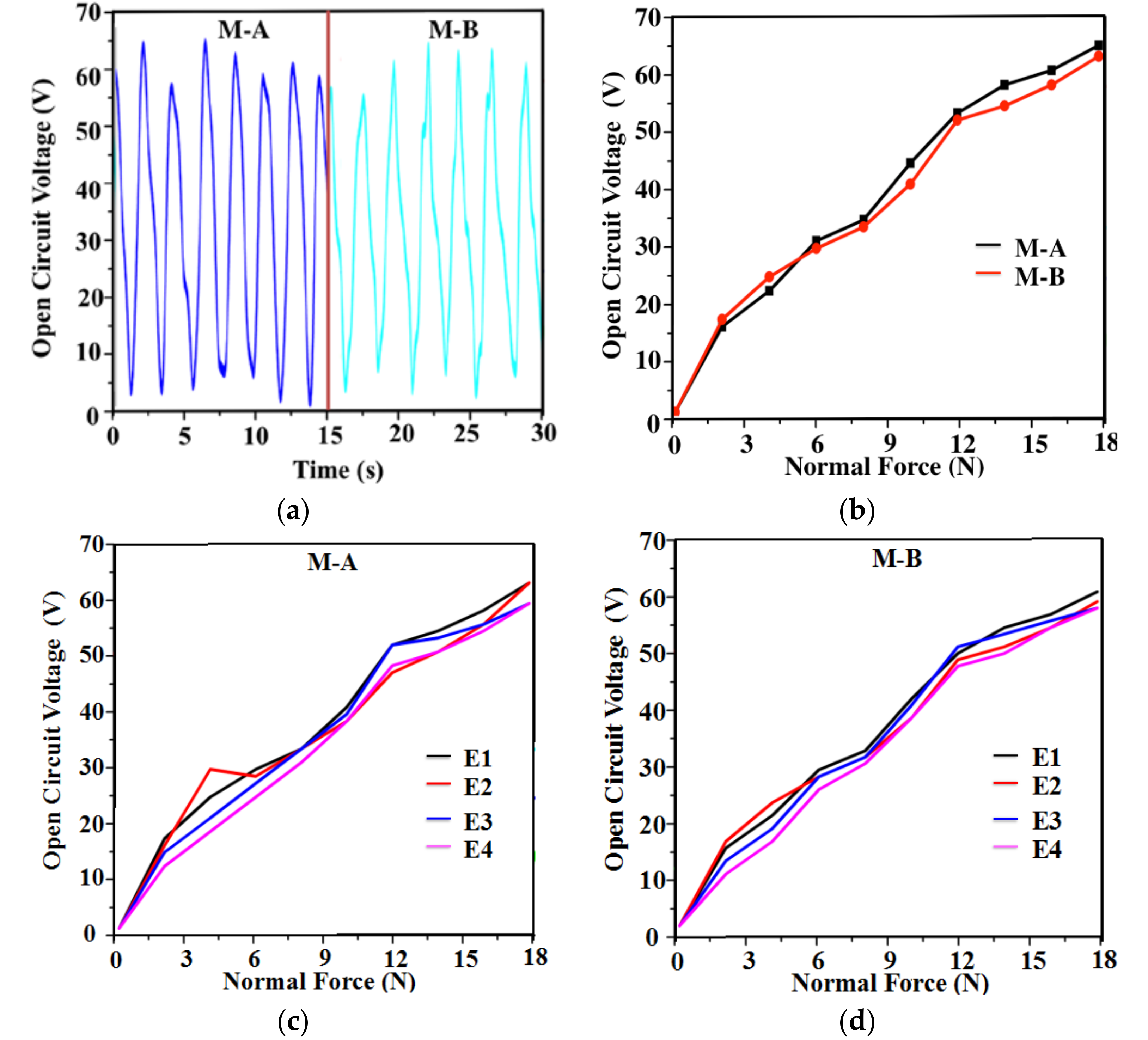
3.1. Detection of Normal Force
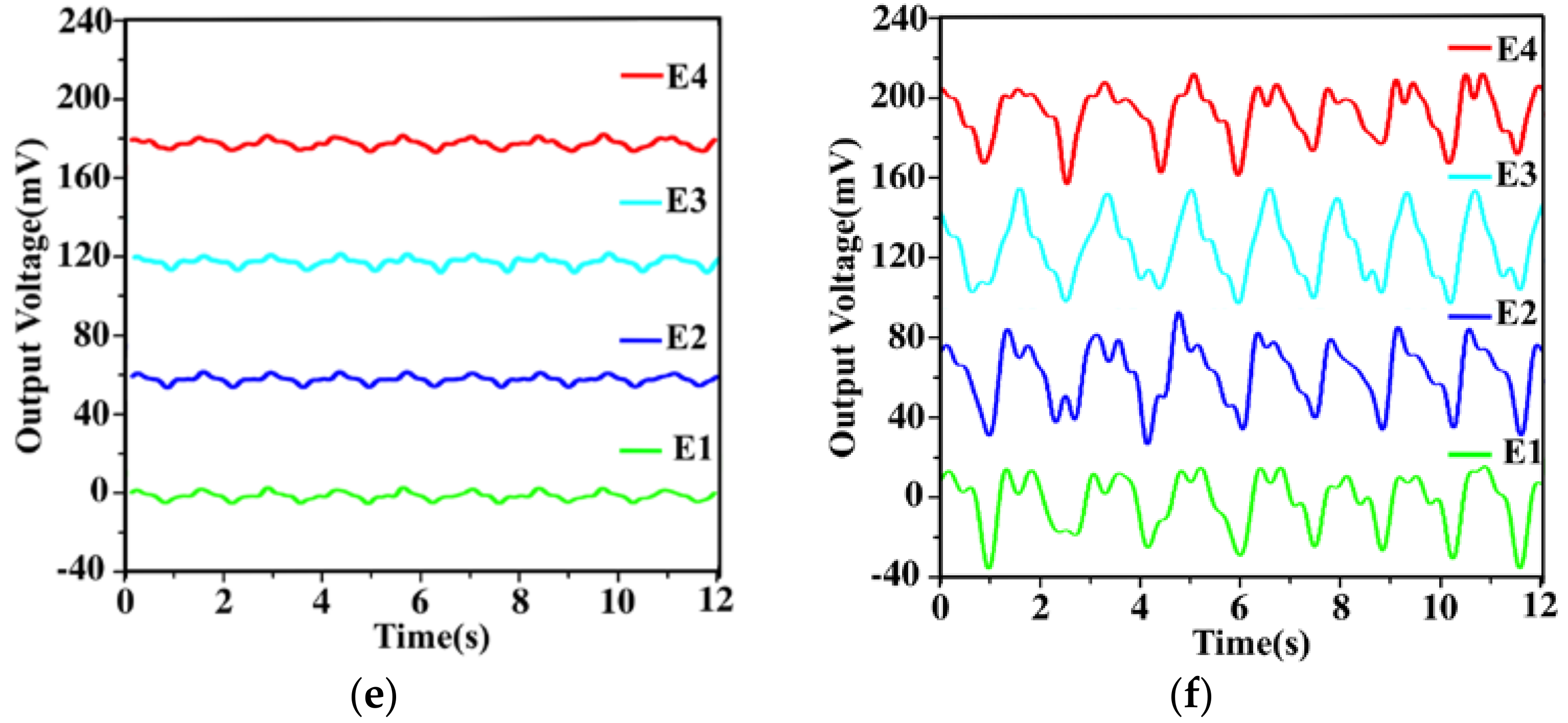
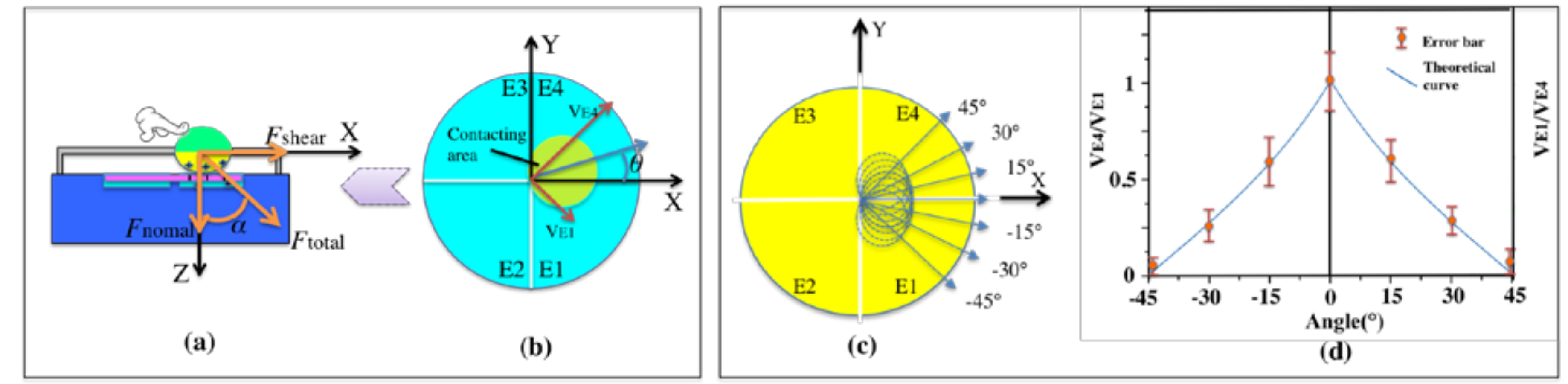
3.2. Detection of Shear Force
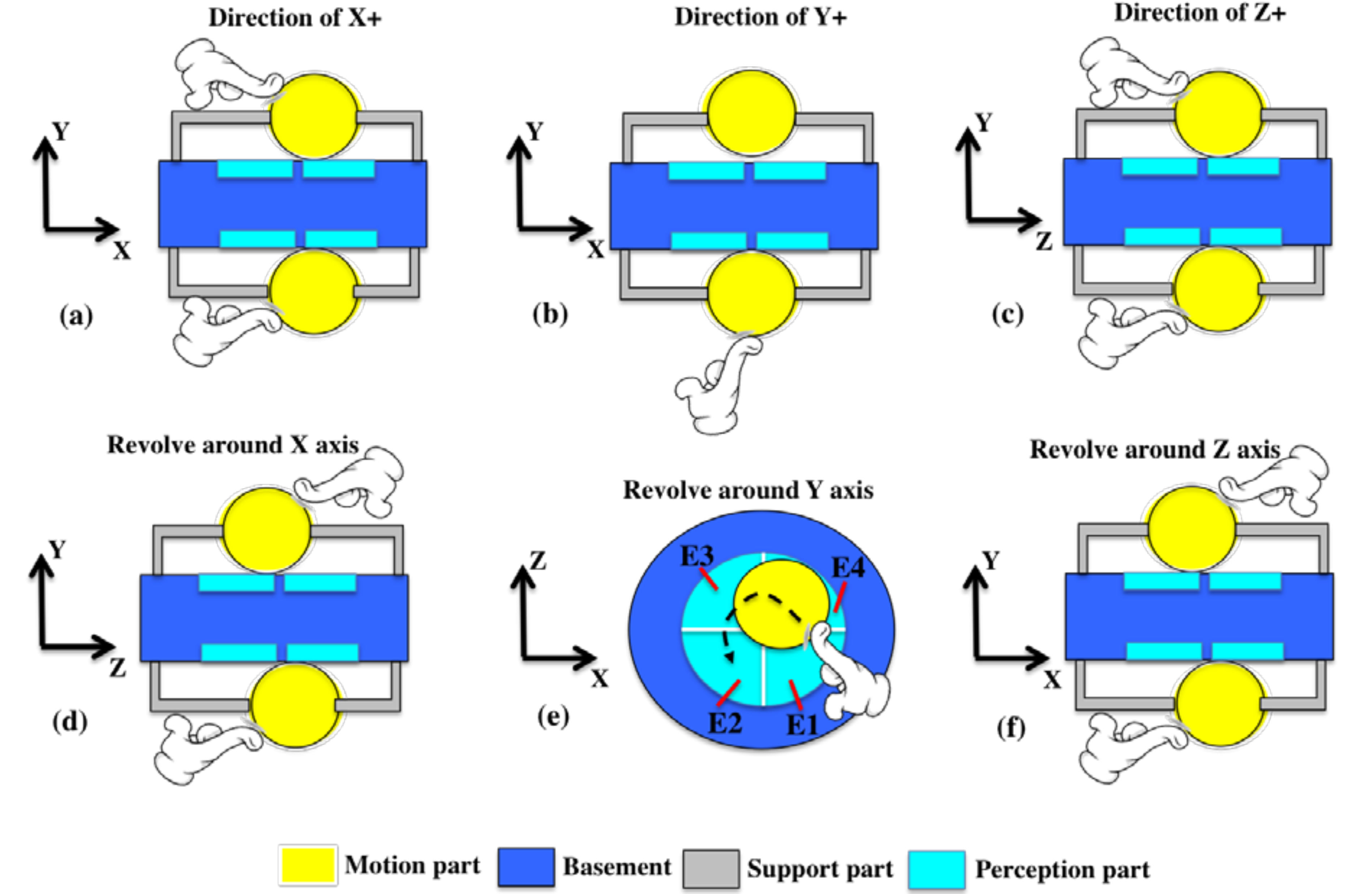
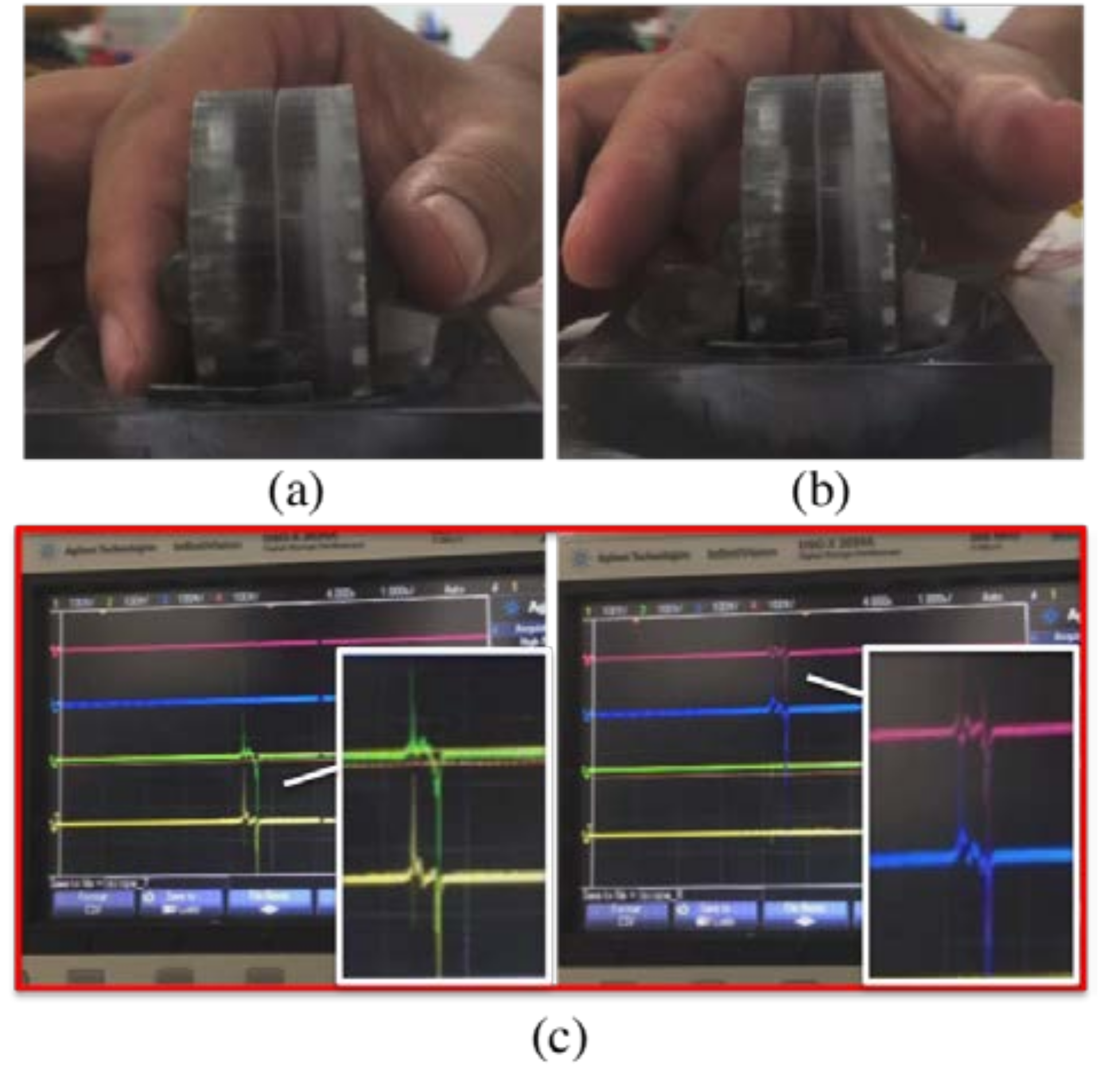
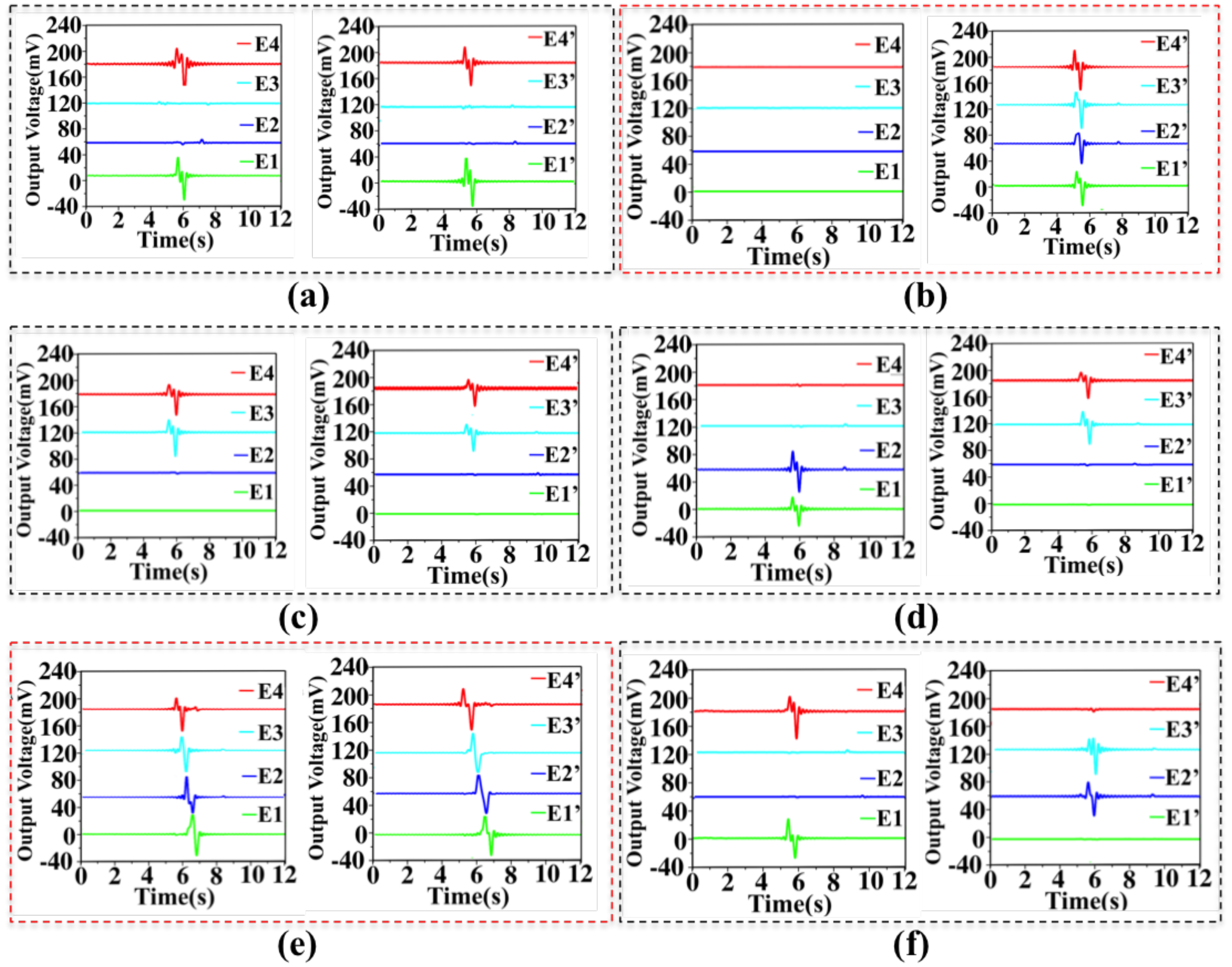
3.3. Characterization of Six-Axis Attitude Detecting
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baytekin, H.T.; Patashinski, A.Z.; Branicki, M.; Baytekin, B.; Soh, S.; Grzybowski, B.A. The mosaic of surface charge in contact electrification. Science 2011, 333, 308–312. [Google Scholar] [CrossRef] [PubMed]
- Schein, L.B. Applied physics. Recent progress and continuing puzzles in electrostatics. Science 2006, 316, 1572–1573. [Google Scholar] [CrossRef] [PubMed]
- Burgo, T.A.L.; Ducati, T.R.D.; Francisco, K.R.; Clinckspoor, K.J.; Galembeck, F.; Galembeck, S.E. Triboelectricity: Macroscopic charge patterns formed by self-arraying ions on polymer surfaces. Langmuir 2012, 28, 7407–7416. [Google Scholar] [CrossRef] [PubMed]
- Grzybowski, B.A.; Winkleman, A.; Wiles, J.A.; Brumer, Y.; Whitesides, G.M. Electrostatic self-assembly of macroscopic crystals using contact electrification. Nat. Mater. 2003, 2, 241–245. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Ji, Z.; Xu, H.; Sun, M.; Chen, T.; Sun, L.; Chen, G.; Wang, Z. Large-Scale and Flexible Self-Powered Triboelectric Tactile Sensing Array for Sensitive Robot Skin. Polymers 2017, 9, 586. [Google Scholar] [CrossRef]
- Fan, F.R.; Lin, L.; Zhu, G.; Wu, W.Z.; Zhang, R.; Wang, Z.L. Transparent triboelectric nanogenerators and self-powered pressure sensors based on micropatterned plastic films. Nano Lett. 2012, 12, 3109–3114. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, H.; Lin, Z.H.; Zhou, Y.S.; Jing, Q.; Su, Y.; Yang, J.; Chen, J.; Hu, C.; Wang, Z.L. Human skin based triboelectric nanogenerators for harvesting biomechanical energy and as self-powered active tactile sensor system. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Miao, L.; Song, Y.; Su, Z.; Chen, H.; Chen, X.; Zhang, J.; Zhang, H. High Efficiency Energy Management and Charge Boosting Strategy for a Triboelectric Nanogenerators. Nano Energy 2017, 38, 438–446. [Google Scholar] [CrossRef]
- Chen, H.; Su, Z.; Song, Y.; Cheng, X.; Meng, B.; Song, Z.; Chen, D.; Zhang, H. Omnidirectional Bending & Pressure Sensor based on Stretchable CNT-PU sponge. Adv. Funct. Mater. 2016, 27, 1604434. [Google Scholar]
- Lee, S.H.; Sheshadri, S.; Xiang, Z.; Martinez, I.D.; Xue, N.; Sun, T.; Thakor, N.V.; Yen, S.C.; Lee, C. Selective stimulation and neural recording on peripheral nerves using flexible split ring electrodes. Sens. Actuators B 2017, 242, 1165–1170. [Google Scholar] [CrossRef]
- Lee, S.H.; Wang, H.; Wang, J.; Shi, Q.; Cheng, S.; Thakor, N.V.; Lee, C. Battery-Free Neuromodulator for Peripheral Nerve Direct Stimulation. Nano Energy 2018, 50, 148–158. [Google Scholar] [CrossRef]
- Zhu, G.; Pan, C.F.; Guo, W.X.; Chen, C.; Zhou, Y.S.; Yu, R.M.; Wang, Z.L. Triboelectric-generator-driven pulse electrodeposition for micropatterning. Nano Lett. 2012, 12, 4960–4965. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Koh, K.H.; Lee, C. Ultra-wide frequency broadening mechanism for micro-scale electromagnetic energy harvester. Appl. Phys. Lett. 2014, 104, R175–R195. [Google Scholar] [CrossRef]
- Zhong, J.W.; Zhang, Q.; Fan, F.R.; Zhang, Y.; Wang, S.H.; Hu, B.; Wang, Z.L.; Zhou, J. Finger typing driven triboelectric nanogenerator and its use for instantaneously lighting up LEDs. Nano Energy 2012, 2, 491–497. [Google Scholar] [CrossRef]
- Lee, S.H.; Wang, H.; Shi, Q.; Dhakar, L.; Wang, J.; Thakor, N.V.; Yen, S.C.; Lee, C. Development of battery-free neural interface and modulated control of tibialis anterior muscle via common peroneal nerve based on triboelectric nanogenerators (TENGs). Nano Energy 2017, 33, 1–11. [Google Scholar] [CrossRef]
- Hassani, F.A.; Mogan, R.P.; Gammad, G.G.L.; Wang, H.; Yen, S.C.; Thakor, N.V.; Lee, C. Toward a Self-Control System for a Neurogenic Underactive Bladder—A Triboelectric Nanogenerator Sensor Integrated with a Bi-Stable Micro-Actuator. ACS Nano 2018, 12, 3487–3501. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Tao, C.; Fan, X.; Chen, J. Progress in triboelectric nanogenerators as self-powered smart sensors. J. Mater. Res. 2017, 32, 1628–1646. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Li, T.; Li, L.; Sun, H.; Xu, Y.; Wang, X.; Luo, H.; Liu, Z.; Zhang, T. Porous Ionic Membrane Based Flexible Humidity Sensor and its Multifunctional Applications. Adv. Sci. 2017, 4, 1600404. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wu, H.; Hasan, D.; He, T.; Shi, Q.; Lee, C. Self-Powered Dual-Mode Amenity Sensor Based on the Water-Air Triboelectric Nanogenerator. ACS Nano 2017, 11, 10337–10346. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, H.; Zhong, X.; Yi, F.; Yu, R.; Zhang, Y.; Wang, Z.L. Electret film-enhanced triboelectric nanogenerator matrix for self-powered instantaneous tactile imaging. ACS Appl. Mater. Interfaces 2014, 6, 3680–3688. [Google Scholar] [CrossRef] [PubMed]
- Evans, D. The Internet of Things: How the Next Evolution of the Internet Is Changing Everything; CISCO White Paper; CISCO Internet Business Solutions Group (IBSG): San Jose, CA, USA, 2011; p. 11. [Google Scholar]
- Lin, L.; Xie, Y.; Wang, S.; Wu, W.; Niu, S.; Wen, X.; Wang, Z.L. Triboelectric active sensor array for self-powered static and dynamic pressure detection and tactile imaging. ACS Nano 2013, 7, 8266–8274. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.S.; Zhu, G.; Niu, S.; Liu, Y.; Bai, P.; Jing, Q.; Wang, Z.L. Nanometer resolution self-powered static and dynamic motion sensor based on micro-grated triboelectrification. Adv. Mater. 2014, 26, 1719–1724. [Google Scholar] [CrossRef] [PubMed]
- Jing, Q.; Zhu, G.; Wu, W.; Bai, P.; Xie, Y.; Han, R.P.; Wang, Z.L. Self-powered triboelectric velocity sensor for dual-mode sensing of rectified linear and rotary motions. Nano Energy 2014, 10, 305–312. [Google Scholar] [CrossRef]
- Chen, T.; Xia, Y.; Liu, W.; Liu, H.; Sun, L.; Lee, C. A Hybrid Flapping-Blade Wind Energy Harvester Based on Vortex Shedding Effect. J. Microelectromech. Syst. 2016, 25, 845–847. [Google Scholar] [CrossRef]
- Lin, L.; Wang, S.; Niu, S.; Liu, C.; Xie, Y.; Wang, Z.L. Noncontact free-rotating disk triboelectric nanogenerator as a sustainable energy harvester and self-powered mechanical sensor. ACS Appl. Mater. Interfaces 2014, 6, 3031–3038. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhou, Y.S.; Zhang, H.; Liu, Y.; Lee, S.; Wang, Z.L. A single-electrode based triboelectric nanogenerator as self-powered tracking system. Adv. Mater. 2013, 25, 6594–6601. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Yang, W.Q.; Zhang, T.; Jing, Q.; Chen, J.; Zhou, Y.S.; Bai, P.; Wang, Z.L. Self-powered, ultrasensitive, flexible tactile sensors based on contact electrification. Nano Lett. 2014, 14, 3208–3213. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Wang, H.; Wu, H.; Lee, C. Self-powered triboelectric nanogenerator buoy ball for applications ranging from environment monitoring to water wave energy farm. Nano Energy 2017, 40, 203–213. [Google Scholar] [CrossRef]
- Cao, Y.; Li, T.; Gu, Y.; Luo, H.; Wang, S.; Zhang, T. Fingerprint-Inspired Flexible Tactile Sensor for Accurately Discerning Surface Texture. Small 2018, 14, 1703902. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Liu, L.; Wu, G.; Chen, W.; Qin, S.; Wang, Y.; Zhang, T. Self-Powered UV–Near Infrared Photodetector Based on Reduced Graphene Oxide/n-Si Vertical Heterojunction. Small 2016, 12, 5019–5026. [Google Scholar] [CrossRef] [PubMed]
- Yi, F.; Lin, L.; Niu, S.; Yang, J.; Wu, W.; Wang, S.; Liao, Q.; Zhang, Y.; Wang, Z.L. Self-Powered Trajectory, Velocity, and Acceleration Tracking of a Moving Object/Body using a Triboelectric Sensor. Adv. Funct. Mater. 2014, 24, 7488–7494. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, H.; Wang, T.; Lee, C. Self-powered liquid triboelectric microfluidic sensor for pressure sensing and finger motion monitoring applications. Nano Energy 2016, 30, 450–459. [Google Scholar] [CrossRef]
- Meng, B.; Tang, W.; Too, Z.H.; Zhang, X.; Han, M.; Liu, W.; Zhang, H. A transparent single-friction-surface triboelectric generator and self-powered touch sensor. Energy Environ. Sci. 2013, 6, 3235–3240. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.; Guo, H.; Fan, X.; Wen, Z.; Yeh, M.H.; Yu, C.; Cao, X.; Wang, Z.L. Triboelectrification-Enabled Self-Powered Detection and Removal of Heavy Metal Ions in Wastewater. Adv. Mater. 2016, 28, 2983–2991. [Google Scholar] [CrossRef] [PubMed]
- Peng, W.; Yu, R.; He, Y.; Wang, Z.L. Theoretical Study of Triboelectric-Potential Gated/Driven Metal–Oxide–Semiconductor Field-Effect Transistor. ACS Nano 2016, 10, 4395. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, C.; Duan, L.; Zhang, L.; Wang, L.; Dong, G.; Wang, Z.L. Flexible Organic Tribotronic Transistor Memory for a Visible and Wearable Touch Monitoring System. Adv. Mater. 2016, 28, 106–110. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Wu, H.; Wang, H.; Wu, H.C.; Lee, C. Self-Powered Gyroscope Ball Using Triboelectric Mechanism. Adv. Energy Mater. 2017, 7, 1701300. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology and self-powered sensors—Principles, problems and perspectives. Faraday Discuss. 2015, 176, 447–458. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Zi, Y.; Yu, H.; Zhang, S.L.; Wang, J.; Ding, W.; Zou, H.; Zhang, W.; Lu, C.; Wang, Z.L. An ultrathin paper-based self-powered system for portable electronics and wireless human-machine interaction. Nano Energy 2017, 39, 328. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, R.; Li, G.; Chen, Y.; Tang, Z.; Wang, Y.; Liu, Z.; Jiang, H.; Zhi, C. Flexible Dual-Mode Tactile Sensor Derived from Three-Dimensional Porous Carbon Architecture. ACS Appl. Mater. Interfaces 2017, 9, 22685. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zheng, Y.; Wang, D.; Zhou, F. Solid-liquid triboelectrification in smart U-tube for multifunctional sensors. Nano Energy 2017, 40, 95. [Google Scholar] [CrossRef]
- Fassler, A.; Majidi, C. Liquid-phase metal inclusions for a conductive polymer composite. Adv. Mater. 2015, 27, 1928–1932. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Radius of sphere | 5 × 10−3 m |
| Radius of electrodes | 10 × 10−3 m |
| Gap between electrodes | 1 × 10−3 m |
| Spacing between PTFE and sphere | 2 × 10−3 m |
| Diameter of integral sensor | 50 × 10−3 m |
| Thickness of integral sensor | 32 × 10−3 m |

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Shi, Q.; Yang, Z.; Liu, J.; Liu, H.; Sun, L.; Lee, C. A Self-Powered Six-Axis Tactile Sensor by Using Triboelectric Mechanism. Nanomaterials 2018, 8, 503. https://doi.org/10.3390/nano8070503
Chen T, Shi Q, Yang Z, Liu J, Liu H, Sun L, Lee C. A Self-Powered Six-Axis Tactile Sensor by Using Triboelectric Mechanism. Nanomaterials. 2018; 8(7):503. https://doi.org/10.3390/nano8070503
Chicago/Turabian StyleChen, Tao, Qiongfeng Shi, Zhan Yang, Jinchang Liu, Huicong Liu, Lining Sun, and Chengkuo Lee. 2018. "A Self-Powered Six-Axis Tactile Sensor by Using Triboelectric Mechanism" Nanomaterials 8, no. 7: 503. https://doi.org/10.3390/nano8070503
APA StyleChen, T., Shi, Q., Yang, Z., Liu, J., Liu, H., Sun, L., & Lee, C. (2018). A Self-Powered Six-Axis Tactile Sensor by Using Triboelectric Mechanism. Nanomaterials, 8(7), 503. https://doi.org/10.3390/nano8070503