Abstract
The underwater wireless sensor network (UWSN) is considered a promising technology for collecting valuable data from underwater areas, particularly for aiding military operations and environmental predictions. UWSNs consist of underwater sensor nodes that have limited energy and use acoustics for communication. Routing in underwater sensor nodes is one of the challenging issues in UWSNs because of the need to forward data packets with minimal energy consumption and a high packet delivery ratio. Selecting the next forwarding nodes is one of the key components of routing in UWSNs and has a direct effect on energy consumption and the packet delivery ratio. Therefore, this problem has gained much attention from the research community with the intent of enhancing the performance of UWSNs. This paper qualitatively reviews routing protocols for UWSNs, focusing on the next-hop selection method and its strengths and weaknesses. A taxonomy is presented for reviewing routing protocols under different categories of the classification. A summary of the qualitative investigation is presented highlighting aims, the next-hop selection method, metrics, and priority considerations. A comprehensive investigation is carried out focusing on energy, link quality, void awareness, reliability, and shortest path characteristics. Finally, we discuss potential future research directions in UWSNs for forwarding node selection.
1. Introduction
Recently, underwater wireless sensor networks (UWSNs) have earned significant attention from researchers of wireless and network communities, due to the growing use of UWSN applications for a range of purposes including ocean monitoring, offshore exploration, controlling underwater mineral extraction, wildlife studies, and monitoring marine life [1,2,3,4,5]. Underwater wireless sensor nodes sense the data from down level of water and forward it to the sink node placed at the water’s surface. The sink node forwards the data to the onshore data center for further processing. In routing protocols, each node selects either a candidate node or a set for candidate nodes to forward data to the next hop towards the sink node. The candidate nodes are selected as next-forwarding nodes based on different criterion and priorities. The criterion is the selected metrics used in the selection of the forwarding nodes. The priorities are determined based on the node’s location or selected metrics. The highest priority node can forward data to a destination with minimum route cost [6,7]. The sender node selects the forwarder by calculating the route cost for its neighboring nodes. Then, the best-selected candidate forwards the data while the rest of the neighboring nodes discard the data.
Routing is one of the fundamental issues in UWSNs. Most of the studies on UWSNs concentrate on MAC and physical layers. Nevertheless, some studies have been conducted in the network layer; however, the study of this area is still in its initial stages [8,9]. The process of designing and implementing a routing protocol for UWSNs is challenging due to the harsh underwater environment, characterized by high error rate, long propagation delay, low bandwidth, and energy limitations [10,11,12]. Therefore, this study takes into account these challenges and limitations in order to analyze the efficiency of routing protocols in UWSNs.
The selection of the next forwarding nodes is one of the major decisions in the design of routing techniques for UWSNs and has a direct effect on the energy consumption and packet delivery ratio [4,13,14]. More precisely, the next forwarding nodes have been chosen based on the selected metrics. The best node forwards the data packets, and the rest of the nodes hold the data packets. The holding nodes forward the same data packets if the computed holding time finishes without overhearing the forwarding of the same data packets. Several forwarding nodes’ selection algorithms have been suggested to reduce the energy consumption and increase the reliability in routing protocols for UWSNs [15,16]. Therefore, the design and development of reliable energy-efficient routing techniques are still being investigated to reduce the energy consumption and improve the packet delivery ratio.
In this context, this paper carries out a comprehensive review of routing algorithms for UWSNs, focusing on next-hop selection technology and challenging. The impact of the selection of next forwarding node on the assign of routing protocols in UWSNs is also highlighted. We categorize recent routing protocols for UWSNs based on the taxonomy presented for reviewing related literature. Under the categorization, we discuss each routing protocol, highlighting the next-hop node selection method and its strengths and weaknesses. We summarize and compare routing protocols for UWSNs based on the number of characteristics. The summary is based on different features including metrics, next-hop selection method, and priority for the best node. The comparison is based on the following performance factors: energy, link quality, void-aware, reliability, multi-hop, and shortest path. Lastly, we conclude this paper by discussing some important future issues that need to be taken into account when designing routing protocols for UWSNs.
2. Underwater Wireless Sensor Network
In general, Underwater Wireless Sensor Networks (UWSNs) can be defined as a group of wireless sensor networks that are used to monitor underwater environments for various purposes including military, natural disaster prediction, and weather forecasting. Since UWSNs use acoustic links as a communication medium, they are also known as Underwater Acoustic Sensor Networks (UASNs). Some of the unique features of UWSNs, which are quite different from traditional Wireless Sensor Networks (WSNs), are discussed below.
2.1. Acoustic Link and Its Constraints
Applying acoustic waves in underwater environments revealed many challenges such as high propagation delay, high energy consumption, high path loss, and low bandwidth. The use of high radio frequency in UWSNs causes rapid absorption, and the use of low radio frequency requires a large antenna. Therefore, the use of radio frequency as a communication medium in UWSNs is impossible. The use of an acoustic link is the most promising communication medium in UWSNs [17,18,19,20,21].
2.1.1. High Propagation Delay
Underwater, the delay of acoustic signal is about , and the speed of acoustic signal is about . Compared to traditional WSNs, these indicators causes high propagation delay due to the speed of radio frequency in the space of about [17,18,19,20,21].
2.1.2. High Energy Consumption
The use of acoustic as a communication medium in UWSNs consumes high energy compared to traditional WSNs using radio frequency as a communication medium [21,22]. More precisely, the energy consumption in UWSNs for transmission is more than for receiving, and the energy consumption for receiving is much more than that for the idle mode.
2.1.3. High Path Loss
In UWSNs, attenuation is the most important factor that has a direct impact on path loss. The acoustic channel has been absorbed because of converting sound energy to heat energy [2,20,22]. In comparison to the radio frequency, absorption loss increases in underwater acoustics. The reason behind this increase is that the radio frequency in the space depends on distance and frequency [17,18,23]. Based on the distance and frequency, the equation shows signal attenuation model in UWSNs, where represents the average signal attenuation, and , , and denote the distance, frequency, and spread, respectively. Moreover, based on Thorp’s empirical equation [24,25,26], the absorption coefficient is calculated using the equation . It is calculated based on Thorp’s equation, where is the frequency in .
2.1.4. Low Bandwidth
Applying the acoustic waves in underwater environments revealed many challenges such as high propagation delay, high energy consumption, high path loss, and low bandwidth. These factors decrease the bandwidth and are significantly dependent on range and frequency [14,27]. The long-range systems may have few bandwidths, and short-range systems may have high bandwidth. In both situations, these factors pose low bit rates. Also, the communication range is significantly reduced compared to the radio channels that are used in terrestrial environments. Based on the sound wave direction, acoustic links are classified into two parts, namely vertical and horizontal. Also, their propagation characteristics differ separately, especially in delay variance, scattering, spreads, and multipath. The main factors that influence acoustic channels are path loss, noise, multipath, high and variance delay, and Doppler spread [14,17].
2.2. Underwater Environment
Firstly, most of the applications utilize three-dimensional network topology due to the three-dimensional nature of seas’ and oceans’ environment. More precisely, employing three-dimensional network topology in UWSNs requires a large number of sensor nodes. Therefore, underwater networks employ sparse network topology due to expensive underwater equipment, and the use of a vast number of nodes causing high network costs [20,22,28]. Secondly, the random movement in different depths and the free movement of sensor nodes by water currents in UWSNs causes dynamic network topology [29,30]. Moreover, the vertical movement has been reported to be negligible, while it is indicated that the horizontal movement is about 1–3 m/s [2,31]; Thirdly, it is difficult to replace and charge the battery of sensor nodes given the harshness of underwater environments. This issue has a direct effect on energy efficiency in underwater environments [2,29,31]. Lastly, the use of a global positioning system (GPS) is not possible in underwater environments due to the radio frequency used in GPS, which can be rapidly absorbed in water [2,17,29].
2.3. Communication Architecture
The network topology can be divided into two categories including static and mobile UWSNs based on nodes’ movement underwater [21,32].
2.3.1. Static UWSNs
This type of architecture employs 2D and 3D architecture [29,32,33]. In 2D architecture, the sinks are deployed in water surface while underwater gateways and ordinary sensor nodes are deployed on the ocean floor. These sensor nodes forward the packets using acoustic links to underwater gateways. Then, these gateways forward the packets to the sinks using acoustic links [2,14,19,33]. On the other hand, in 3D architecture, sensor nodes are deployed at different depths and equipped with an acoustic modem, while sink nodes are equipped with both radio and acoustic modems. These sensors detect the events from underwater environments and forward the information to the sink nodes using acoustic links. Sink nodes then forward the packets to the onshore base station using radio links.
2.3.2. Mobile UWSNs
In mobile UWSNs’ architecture, sink nodes are deployed on the water’s surface and equipped with both radio and acoustic modems, while sensor nodes are deployed at different depths of water and equipped with acoustic modems. The depth of the nodes is controlled by buoyancy control and they can move freely with the water currents [13,31]. The horizontal movement of these sensor nodes is about 1–3 m/s, while their vertical movement is negligible [4,34]. Sensor nodes sense underwater events and then forward the information to the sink nodes via acoustic waves. Next, the sink transmits the packets to the onshore base station via radio waves. Most of the routing protocols in UWSNs are designed for mobile UWSNs architecture since it is more challenging compared to static UWSNs architecture.
3. Related Literature Reviews
In a survey paper, we investigated pressure-based routing protocols for underwater wireless sensor networks [4]. This paper is focused on a new classification that is based on the communication void. This article also provided a comparison between routing protocols based on their features, performance, and simulation setting, along with some future directions related to pressure-based routing algorithms. In [15], Zenia et al. have reported the energy efficiency and reliability of MAC and routing protocols for underwater wireless sensor network. This paper provides a detailed overview of the UWSN protocols that improve energy efficiency or reliability. Zenia et al. have classified protocols based on their routing strategies. Moreover, the protocols are compared based on different parameters along with their advantages and shortcomings. Simulation results have been carried out at the end of this paper, and the reviewed routing protocols have been compared considering energy efficiency and throughput.
In [13], Li et al. conducted a survey of routing protocols for underwater acoustic sensor network. The aim of this survey was to classify the routing protocols based on cross-layer design methods, and it is considered the first paper that provides this classification. Moreover, they reviewed the intelligent algorithm-based routing protocols that can provide a broad range of concepts for routing protocol design for effectively improving the routing performance. Furthermore, this paper investigated the development trends of UASN routing protocol design in recent years to offer researchers clear and direct insights for the development of underwater acoustic sensor network routing protocols. In [3], Darehshoorzadeh and Boukerche introduced underwater sensor networks as a new challenge for Opportunistic Routing (OR) protocols. This article comprehensively reviewed OR protocols in UWSNs. Moreover, the critical issues faced when using OR in different kinds of networks were also discussed. Furthermore, OR protocols were classified and explained in depth, along with their advantages and disadvantages. Lastly, this paper has been summarized with a comparison of all discussed protocols highlighting future research directions that must be further investigated for OR protocols in UWSNs. In this review article, we focus on next-hop node selection techniques and challenges for routing protocols in UWSNs, which is quite different from the aforementioned surveys focusing either on a particular category of routing protocols or complete routing protocols design issues for overall performance improvement.
4. Next Forwarding Node Selection in UWSNs
In this section, next forwarding node selection for UWSNs is reviewed. Firstly, the impact of next forwarding node selection on the design of routing techniques is investigated. Secondly, the related literature is critically reviewed following a proposed taxonomy. Thirdly, a comparative investigation is performed, focusing on the strengths and weaknesses of the techniques considered.
4.1. Impact of Next Forwarding Node Selection on the Design of Routing Techniques
Next forwarding node selection is one of the most common issues in routing protocols that must be taken into consideration [4,6,7,35]. This issue attracts researchers to design a next forwarding node algorithm. In routing, the general structure of this algorithm is as follows. Each source node selects a group of its neighbors. These nodes have been chosen based on different metrics such as residual energy, physical distance, and link quality. The nodes then hold the data packet for a certain length of time based on various criteria such as distance, sound propagation speed, transmission range, and residual energy to avoid collision and redundant packet transmission. The best node has the lowest holding time, so it has the highest chance of forwarding the data packets. If a node overhears the forwarded data packet, it simply removes the data packet from its buffer. Otherwise, it waits until its holding time finishes to forward the packets. Therefore, these algorithms have a direct impact on performance indicators such as packet delivery ratio and total energy consumption.
The use of different metrics for selecting the next forwarding node has a direct impact on the overall performance of routing protocols. The use of a residual energy metric helps in balancing the energy between nodes. Link quality is another important metric that has a direct impact on improving the packet delivery ratio and reducing energy consumption [36]. The use of a depth metric helps in reducing the energy consumption because each node calculates the depth locally, whereas the physical distance can be calculated using beaconing messages provided by the sink. The use of GPS for identifying the location of the node is costly due to the inability to use GPS in underwater environments. Therefore, it is essential to design a forwarding node selection algorithm based on multi-metrics, which selects energy-efficient and reliable forwarding nodes to reduce energy consumption, reduce network traffic, and ensure data delivery.
Communication void is one of the significant issues that occurred while selecting the next forwarding nodes. This problem occurs if the sender node does not find any neighbor node in its transmission range [11,25,37,38]. Since UWSNs suffer from dynamic and sparse network topology, these type of topologies impose a low packet delivery ratio and further minimize throughput due to a lack of algorithms that handle the communication void problem. Moreover, the use of weak void avoidance algorithms entails high energy consumption. In TWSNs, void-handling algorithms are not efficient to use in harsh environments due to the specific characteristics of UWSNs [37]. Therefore, avoiding the void nodes in the process of selecting the next forwarding set is necessary to improve the packet delivery ratio and ensure data delivery.
Selecting the shortest path is one of the fundamental issues that has a direct impact on the number of transmissions, energy consumption, and network lifetime [7]. Selecting a node that has less depth than the sender in transmission range is a common way of handling the problem of reducing the number of transmissions and the number of nodes selected to forward the data packets. The main disadvantage of this algorithm is that it totally depends on the distance between the sender node and the receiver node, without taking into account different metrics such as residual energy and link quality. Consequently, it is necessary to enhance path selection while selecting the next forwarding nodes, which will help by reducing the total number of data packets forwarded, suppressing unnecessary forwarding, and reducing the total energy consumption.
4.2. Taxonomy of Next Forwarding Node Selection in UWSNs
In this paper, we focus on location information and forwarding techniques as selected criteria to introduce a classification of forwarding node algorithms in UWSNs. In Figure 1, routing protocols have been divided into two categories: localization and non-localization routing protocols. Each category has been divided into different subcategories based on the selection mechanism of forwarding nodes. Some of the protocols belong to a different category. The next sections describe the features of each category and some existing well-known routing protocols belonging to each category in detail, along with techniques used in these protocols to handle forwarding node selection.
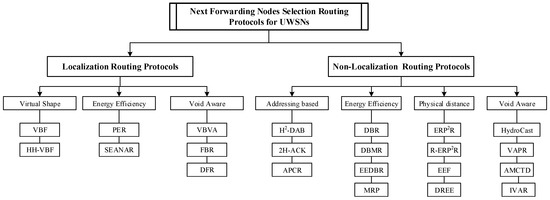
Figure 1.
Taxonomy of next forwarding node selection in UWSNs.
4.2.1. Localization Routing Protocols
In the localization category, to select the next forwarding nodes towards the sink, it is supposed that each node already has location information about itself and sinks using GPS. The main idea of all localization routing protocols is to employ location information for opportunistic routing, even though they have major differences in their ways of finding neighboring nodes toward the sinks. The localization protocols take into account specific shapes between the sink node and the forwarder node to select the next forwarding nodes towards the sink such as layer [39], cone [40], zone [41], and virtual pipeline [25,31,42]. Based on the selection mechanism of forwarding nodes, localization routing protocols can be divided into three categories: virtual shape, energy-efficient, and void-aware. The following paragraphs discuss these subcategories in detail regarding the selection of the next forwarding nodes.
Virtual Shape
In localization routing protocols, selecting the next forwarding nodes can be done based on designing specific shapes between the sink and forwarder node such as layer [39], cone [40], zone [41], and virtual pipeline [25,31,42]. These shapes have a direct impact on the performance of the protocol. More precisely, in big shapes, the packet delivery ratio is totally increased, and the chance of void areas decreases with an increase in the number of forwarding nodes. Moreover, the energy consumption increases when increasing the number of nodes, which has a direct impact on reducing the performance of overhearing algorithms. On the other hand, in small shapes, the performance and path selection are improved, the packet delivery ratio is totally decreased, and the chance of void areas increases with the decrease in the number of forwarding nodes, which can reduce the possibility of selecting the best forwarding nodes. To summarize, the inapplicability of GPS in an underwater environment causes designing the virtual shapes to be very costly. Moreover, all of the proposed routing protocols in the location-based category are designed based on virtual shapes, and the performance can be directly affected by a shape’s size and type. The following paragraphs discuss the localization routing protocols belonging to this subcategory in detail.
Vector-Based Forwarding (VBF) Routing Protocol provides a solution for one fundamental problem in UWSNS: robust, scalable, and energy-efficient routing [42]. A Location-Based Routing Approach, named Vector-Based Forwarding Protocol for Underwater Sensor Networks (VBF), was proposed. VBF is the first localization routing protocol by which each node knows its sink, neighbors, and own location information. In order to select the next forwarding node, each sender node uses a fixed virtual pipeline from source nodes to the destination/sink (distance to the sink) with a threshold value equal to the predefined radius value, as shown in Figure 2. Only nodes that are located inside the pipeline, taking into account the threshold value, can be selected as forwarding nodes. Figure 2 illustrates an example of how to select the next forwarding nodes. Assume that nodes A, B, and C are source nodes. Therefore, they create a virtual pipeline toward the sink and then each source node embeds its sink location and its own location in the header of the data packet and broadcasts it. Each receiver node calculates its distance to the created vector. If the computed distance is less than the threshold, it considers itself a candidate to forward the data packet because it is located inside the virtual pipeline. Thus, it accepts the data packet, updates the data packet’s header information, and then broadcast it; otherwise, it discards the data packet. In order to improve the network traffic and energy consumption in dense deployments, a desirable factor and a time interval delay are calculated by each eligible node to locally identify the density and decrease the number of forwarder nodes.
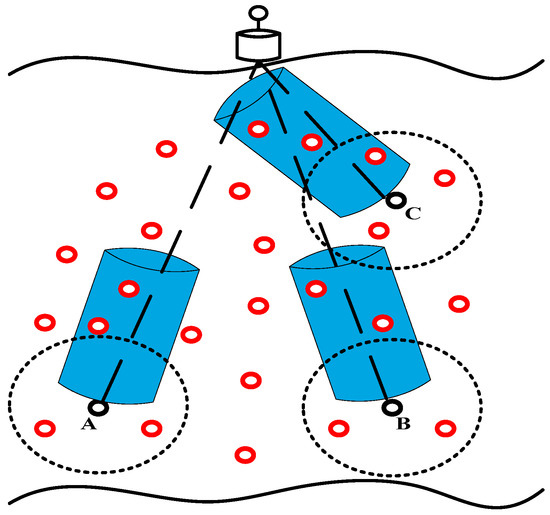
Figure 2.
Single pipeline in VBF.
The major advantage of VBF is that the energy consumption and network traffic are significantly decreased because the number of candidate nodes is decreased. However, VBF is characterized by some disadvantages; VBF uses a location information metric in selecting the next forwarding nodes, which is too costly due to the inapplicability of GPS in an underwater environment. Moreover, the virtual pipeline is the key idea of VBF. Therefore, the performance in selecting the next forwarding nodes is directly affected by the radius of the virtual pipeline. Furthermore, VBF suffers from a lack of communication void algorithm that occurs during the selection of the next forwarding nodes.
The Hop-by-Hop Vector-Based Forwarding (HH-VBF) Routing Protocol enhances VBF by designing an adaptive location-based routing protocol named hop-by-hop vector-based forwarding (HH-VBF) [31]. Different from VBF, this protocol employs a virtual pipeline from the sender node towards the destination/sink with dynamically changeable pipeline based on nodes’ position, which increases the efficiency of selecting the next forwarding node. Figure 3 illustrates an example of how nodes A, B, and C create their virtual pipeline. As shown in this figure, each source node creates its pipeline towards the sink individually to forward the data packet.
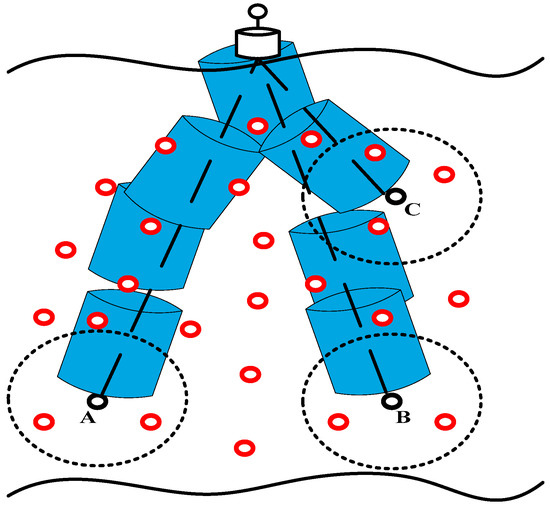
Figure 3.
Virtual pipelines in HH-VBF.
Similar to VBF, the energy consumption is significantly decreased, and the delivery ratio is increased. Moreover, the use of location information is the main disadvantage of HH-VBF due to a lack of GPS in an underwater environment. Moreover, it did not come up with any solution to handle the communication void problem. Furthermore, this protocol did not utilize any energy-efficient or reliable metrics that help in balancing the energy consumption between nodes and further improve the network lifetime.
Energy Efficiency
Selecting the most energy-efficient next forwarding nodes is a major problem in routing protocols and has a direct impact on overall routing performance indicators such as energy consumption, packet delivery ratio, and network lifetime. A localization routing protocol provides virtual shapes using location information from the sender node to sink. This kind of solution is not energy-efficient due to the cost of using localization and the lack of GPS. Moreover, most of the existing localization routing protocols select the best forwarding node based on its distance to the sink. Specifically, VBF, HH-VBF, VBVA, and FBR employ only a distance parameter. SEANAR and PER use a distance parameter with a residual energy metric, whereas DFR utilizes a distance parameter along with link quality. The following paragraphs discuss the localization routing protocols belonging to this subcategory in detail.
Power-Efficient Routing (PER) Protocol is another location-based routing protocol that has been proposed by Huang et al. [43]; this protocol tackles the energy consumption problem in underwater environments. The architecture of UWSN is such that the sink node is located in the center, the ordinary nodes are scattered randomly in the water, and the source nodes are deployed at the bottom, as shown in Figure 4. PER is composed of two modules: a forwarder node selector and a forwarding tree-trimming mechanism. The fuzzy logic technique has been employed in the first module to select two next-hop nodes. Three parameters have been utilized: residual energy, distance, and the angle between two neighbors. Based on defuzzifier, two forwarding nodes have been selected. The second model has been applied if the number of duplicate packets is bigger than a predefined threshold. Otherwise, the data packet is sent to the two selected next-hop nodes.
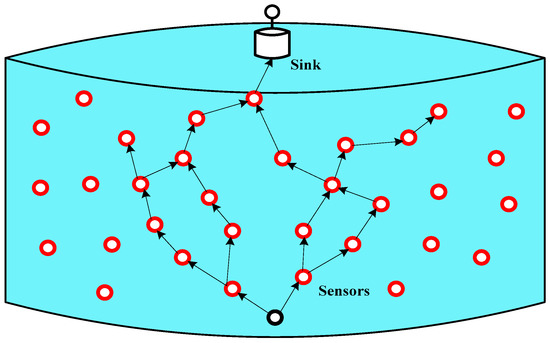
Figure 4.
Deployment of PER in USWNs.
The main reason why PER has better performance than VBF is that it uses two hop nodes during the forwarding process, whereas VBF employs a flooding technique in its virtual shape. Moreover, PER consumes less energy and reduces the overhead by employing a forwarding tree-trimming mechanism that helps in reducing the number of duplicated packets. However, this protocol did not provide a method to avoid the communication void problem Moreover, the use of single sink architecture entails high energy consumption for nodes closer to the sink. Furthermore, it still needs an expensive location information that provided by GPS, which cannot be used in underwater environments.
Different from VBF, an energy-efficient and topology routing protocol (SEANAR) for an underwater sensor network is designed based on topology information [39]. In general, this protocol uses spherical layers as shown in Figure 5 for dividing the forwarding area, whereas one sink is deployed in the center of the water’s surface. Three types of neighbors have been introduced in SEANAR: inner layer (i.e., closest to the sink), aside layer (i.e., almost halfway to the sink), and outer layer (i.e., furthest from the sink). SEANAR is divided into two phases. The first phase is responsible for sharing information such as the node ID, residual energy, and location for the nodes that are located in the inner and aside layer by a broadcasted hello packet, whereas the nodes at the outer layer discard the hello packet. Next, the number of nodes in the inner and aside tables has been counted, and the degree of each node has been calculated based on this number. The second phase is responsible for selecting the next forwarding nodes by broadcasting a hello packet. The receiver nodes update the hello packet if the sender nodes are in the outer or aside layer. The sender node then calculates the weight after receiving all hello packets from its neighbors.
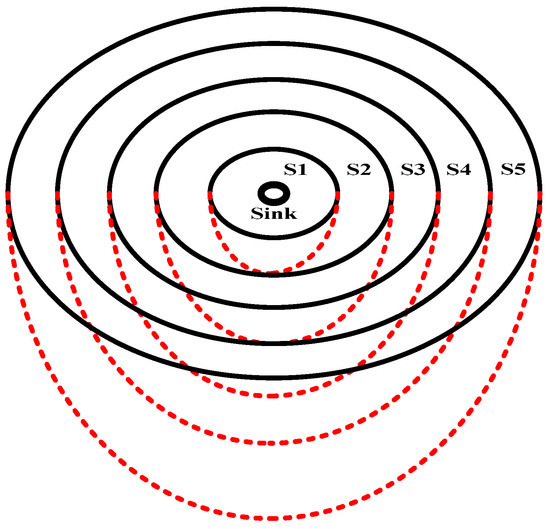
Figure 5.
Layering in SEANAR.
The main advantage of this protocol is that the weight values are calculated based on multi-metrics. However, this is not efficient due to the lack of GPS information and unreliable links. Moreover, SEANAR did not provide any solution for the communication void problem. Furthermore, due to the huge number of hello packets that are used to calculate the weight value, the energy consumption increased. Also, the use of single sink architecture causes high energy consumption for the nodes placed closer to the sink.
Void-Aware
Communication void is one of the crucial problems in routing protocols. This problem occurs if the sender node does not find any neighbor node in its transmission range. Since UWSNs suffer from dynamic and sparse network topology, these topologies impose a low packet delivery ratio and further minimize throughput due to a lack of algorithms that handle the communication void problem. Moreover, the use of weak void avoidance algorithms entails high energy consumption. In TWSNs, void-handling algorithms are not efficient to use in harsh environments due to the specific characteristics of UWSNs. The following paragraphs discuss the localization routing protocols belonging to this subcategory in detail.
Vector-based void avoidance (VBVA) is another enhancement of VBF and is considered the first void avoidance protocol that provides 3D flooding mechanisms to deal with the communication void [25]. If there is no void area, VBVA works the same as VBF. The main difference between VBF and VBVA is that VBVA provides two 3D flooding mechanisms to deal with communication void, called vector-shift and back-pressure. In the vector-shift mechanism, the forwarding vector has been shifted, and the next forwarding node has been selected in the boundary of the void area. If the void is convex, the vector-shift mechanism can forward the packet around the void towards the destination. On the other hand, if the void is concave, the vector-shift method cannot work efficiently. Therefore, VBVA uses the back-pressure method to forward the data packet back to another node that can apply the vector-shift mechanism.
One of the significant advantages of VBVA is that it can handle the void area efficiently. However, similar to VBF, VBVA uses a location information metric in selecting the next forwarding nodes, while finding this information is too costly due to the inapplicability of GPS in an underwater environment. Moreover, the virtual pipeline is the key idea behind VBF and VBVA. Therefore, the performance in selecting the next forwarding node is directly affected by the radius of the virtual pipeline.
Based on the cross-layer approach, a location-based scalable routing technique, named Focused Beam Routing (FBR), is presented [40]. The use of a different power level is the main way this protocol reduces energy consumption. In the network architecture, the sink is placed at the corner of the network. In order to select the next forwarding node, the sender node employs a cone from itself towards the sink and sends a request-to-send (RTS) message with power level (P1). The receiver node replies with a clear-to-send (CTS) message including its ID and location information if it is placed in the cone. The sender node waits a certain amount of time to receive the CTS messages from its neighbors. The sender node then selects the closest one as the best forwarding node. Otherwise, it increases the power level and sends a new RST message, and so on. If there are no nodes inside the cone after increasing the number of nodes to the largest number of power level, it means that the node is placed in the void area. Therefore, FBR uses shifting cone to left or right to handle the communication void. The use of a cone can be considered the main advantage of FBR as it reduces the number of nodes that are involved in the forwarding process. However, the use of location information is the main disadvantage due to the lack of GPS in an underwater environment. Moreover, the method of handling the communication void requires increasing the power level to the maximum, which causes high energy consumption.
An Efficient Directional Flooding-Based Routing (DFR) Protocol addressed the issues of VBF and HH-VBF despite their advantages regarding high packet loss [41]. An Efficient Directional Flooding-Based Routing Protocol (DFR) is a location-based protocol. In terms of architecture, the sink and source node are placed on the left end and right end of the area, respectively; also, the ordinary nodes are scattered at the bottom of the water. Moreover, this protocol introduces a dynamic zone hop-by-hop method to transmit the data packets. Furthermore, this protocol considers the link quality between nodes and the distance to select the next forwarding nodes, and defines two angles, named current angle and reference angle, as shown in Figure 6. In order to forward the data packet, the sender node broadcasts a hello packet including its position and reference angle to its neighbors. The receiving node then compares its current angle with the reference angle that is included in the hello packet. It discards this packet if its current angle is less than or equal to the reference angle. Otherwise, it can be involved in the forwarding process. Therefore, the forwarder node updates the reference angle that is included in the data packet based on the link quality and rebroadcasts it to its neighbors. DFR addresses the communication void problem utilizing two methods. The first method is to change the dynamic zone’s size to be large enough to allow at least one node to enter the forwarding process. The second method will be applied in case none of the nodes have entered the range of the source node. Therefore, a detour path has been discovered towards the sink node.
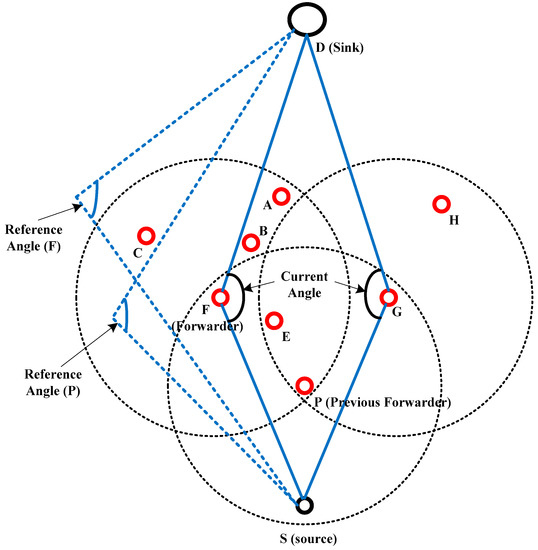
Figure 6.
Packet forwarding in DFR.
The major advantage of DFR is that it uses the link quality metric. This can improve the packet delivery ratio and the reliability of the network. Moreover, it can handle the communication void efficiently. However, the use of location information is one of the main drawbacks of DFR. Moreover, the energy consumption is increased due to the changing of the dynamic zone and DFR. Furthermore, it did not consider residual energy metric to solve the high energy consumption problem.
4.2.2. Non-Localization Routing Protocols
Non-localization routing protocols did not fully use location information for selecting the next forwarding nodes during the routing process. To find the group of forwarder nodes toward the sink, routing protocols in this category use other information such as physical distance, hop-count, layering, dynamic address, and depth of nodes. Non-localization category is divided according to data collection methods into two subcategories: beacon-based and pressure-based. In beacon-based, a group of next forwarding nodes toward the sink is identified based on special information about the network such as addressing based and physical distance that is provided by sending periodic beacon messages from sink nodes to the ordinary nodes from the surface of the water to the bottom.
On the other hand, depth information is the main factor used in the pressure-based subcategory to find the position of each node. All of the nodes are equipped with inexpensive pressure sensors that can calculate the depth manually and locally by changing the pressure of the water in different depths in the water current. The next forwarding node is the node that has less depth than the sender node. This process is continuously repeated in a hop-by-hop manner until reaching the sink node located on the water surface in UWSNs. The pressure-based method does not need expensive and full location information compared to the location-based and beacon-based methods. The location-based category needs complete information about a node’s location, and the beacon-based category requires sending expensive beacon messages. Conversely, a pressure-based category just employs depth information that is obtained locally without high cost and extra overhead. Based on the selection mechanism of forwarding nodes, non-localization routing protocols can be divided into four categories: addressing based, energy-efficient, physical distance, and void-aware. The following paragraphs discuss these subcategories in detail regarding selecting the next forwarding nodes.
Addressing Based
In this subcategory, each protocol assigns a virtual number as an address for each node based on beacon messages provided by the sink. This address helps in selecting the next forwarding nodes. The following paragraphs discuss the non-localization routing protocols belonging to this subcategory in detail.
Hop-by-Hop Dynamic Addressing Based (H2-DAB) Routing Protocol is proposed and considered as a first address-based algorithm aimed at improving energy efficiency, scalability, and robustness [44]. In general, H2-DAB do not use full location information about the nodes. The process of selecting the next forwarding nodes has been divided into two phases, assigning a dynamic address and data delivery. In the first phase, the sink node sends a beacon message as a hello packet to all nodes. The node that receives the hello packet assigns itself a hop ID based on the number of hops to the sink. The nodes that have smaller address are located closer to the sink and are eligible to forward the data packets. In Figure 7, the hop ID of node N20 is equal to 45, which indicates that its hop distance from one sink is equal to 4, while its distance to another sink is equal to 5. In the second phase, the sender node sends a request message to its neighbors. The receiver node replies to the request message with its ID and hop ID. The sender node chooses the node with the smallest hop ID as the next forwarding node.
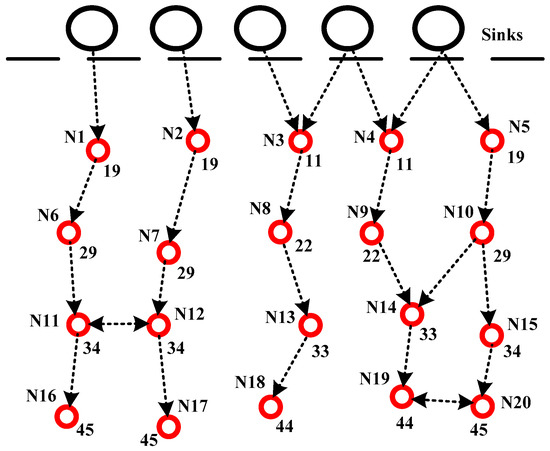
Figure 7.
H2-DAB addressing technique.
This protocol has some advantages: the employment of multi-sink has a direct impact on reducing the congestion at the nodes closer to the sink. Moreover, H2-DAB did not require full location information as it uses beaconing messages provided by the sink. The H2-DAB has some disadvantages. It did not consider any solution for the communication void problem. Moreover, the process of assigning the address should be updated periodically, which affects the performance of the protocol. Furthermore, H2-DAB did not utilize any energy and link quality metrics for assigning an address for each node, which leads to an increase in the energy consumption and packet loss.
In order to improve the network reliability, Two-Hop Acknowledgment (2H-ACK) Routing Protocol has been conducted as a new version of H2-DAB [45]. In general, 2H-ACK is divided into two phases; the first one is assigning dynamic address to nodes and the second is data packet forwarding. The first phase is similar to H2-DAB. The second phase employs six steps for forwarding the data. This protocol stores two copies of the data packet in the network to provide reliable data delivery. These six steps are clearly shown in Figure 8. In the first step, the sender node broadcasts an inquiry message to its neighbors, as illustrated in Figure 8a. The neighbors that have smaller hop ID than the sender will reply to the inquiry message as shown in Figure 8b. The sender nodes then select the best forwarder node and forward the data packet to this node. In Figure 8d, the forwarder node broadcasts an inquiry request to its neighbors to find its own next hop node before sending an acknowledgment message to the sender. In Figure 8e, the forwarder waits to receive a reply from its neighbors. In the last step, the forwarder node selects the best next forwarder nodes and sends that data packet to this node. Moreover, it can now send an acknowledgment message to the sender, as shown in Figure 8f.
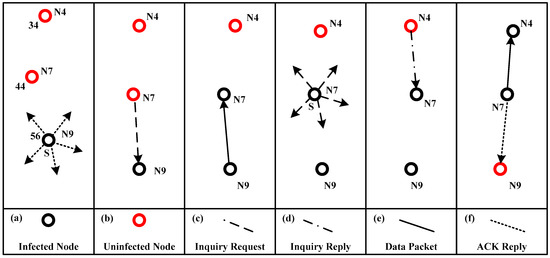
Figure 8.
Data packet forwarding in 2H-ACK.
The advantage of 2H-ACK is that it does not require full location information as it uses beaconing messages provided by the sink. Moreover, the employment of multi-sink has a direct impact on reducing the congestion at the nodes closer to the sink. Furthermore, the amount of packet loss has been decreased because of the use of two copies during the forwarding process. However, this protocol has some drawbacks. It still did not handle the communication void problem. Moreover, the process of assigning the address should be updated periodically, which affects the performance of the protocol. Furthermore, H2-DAB did not utilize any energy and link quality metrics for assigning an address to each node, which leads to an increase in energy consumption and packet loss.
A novel energy-efficient multi-hop scheme, the adaptive power controlled routing (APCR) protocol for underwater sensor network, has been proposed [46]. APCR uses different power levels to assign nodes to various layers around the sink and allows the nodes to switch between groups of transmission power levels to handle the mobility of the network. APCR is divided into two phases, namely layer assignment and communication phase. In the first phase, each node has been assigned a layer ID. To this end, the sink sends a beacon message at the maximum power level. The receiver nodes extract the layer ID included in this message and set its layer ID based on the extracted layer ID. Then, the sink decreases the power level and layer ID, and broadcasts the message. The receiver node compares the layer ID in the received message to its layer ID and chooses the smallest one. At the end of this phase, each node has been assigned a layer ID. Figure 9 shows the layer assignment phase. In the communication phase, the sender broadcasts a hello packet using its minimum power level to find the next forwarding nodes among its neighbors. Only the nodes in a layer above the sender would reply to the message if they are located in the communication range of the sender. If the sender does not receive any reply message, it increases the power level and broadcasts the message again until it finds the forwarding sets. Receivers then reply to the message with their ID, layer ID, and residual energy level. The sender then adds this information to the table and forwards the data packets to the node with maximum residual energy. An acknowledgment message is sent to the sender from the receiver node, embedded with its updated residual energy. This process is continuously repeated until the data packet reaches one of the sinks.
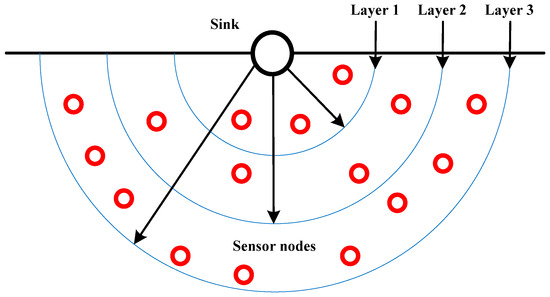
Figure 9.
Layer assignment phase in APCR.
The advantages of APCR are as follows. It solves the communication void problem by changing the power level during the process of finding the next forwarding nodes, which leads to an improvement in the packet delivery ratio. Moreover, it does not utilize full location information provided by GPS. Furthermore, it employs residual energy for selecting the best candidate as it balances the energy consumption. However, APCR suffers from some problems. The proposed architecture has high energy consumption due to the maximum power level used. Moreover, the use of a different power level while selecting the next forwarding nodes increases the energy consumption. Furthermore, APCR does not consider the link quality parameter in selecting the next forwarding nodes, which has a direct effect on the packet delivery ratio.
Energy Efficiency
As mentioned before, energy efficiency is one of the main goals that attracts researchers designing routing protocols. In this subcategory, the main aim is to reduce the energy consumption and improve the network lifetime by using residual energy factor or some of the factors that help balance the energy consumption between sensors. The following paragraphs discuss the localization routing protocols belonging to this subcategory in detail.
The Depth-Based Routing (DBR) Protocol is considered as a first pressure routing that provides scalable and efficient routing services in UWSNs [37]. This protocol does not need full location information for the sensor nodes; it only requires local depth data. In this protocol, in order to select the next forwarding nodes, the sender node tries to find the best neighboring nodes regarding depth information to forward the packet. In other words, neighboring nodes with less depth than the sender will be candidates for forwarding the packet, as shown in Figure 10. DBR follows a specific routing procedure, starting with the sender node broadcasting the packets, including its depth information, to its one-hop neighbors. After receiving the packets, the neighboring node compares its depth with the sender’s depth, which is embedded in the packet. This node will be a candidate for forwarding the packet if its local depth is less than the sender depth. Otherwise, the node directly discards the packet. After that, the candidate nodes broadcast the packet, including their depth, to their one-hop neighbor nodes, and so on. This technique uses hop-by-hop. In each hop, the data packet is sent to a node with a lower depth than the sender until it is delivered the sink. Moreover, for each received packet, each forwarder node calculates the holding time based on the depth information. The candidate nodes start forwarding the packets if the holding time finishes. Therefore, the node with the lowest depth is the best sender node. Upon overhearing the packet, the candidate node removes the packet from its buffer. Otherwise, it will forward the packet after its holding time is finished.
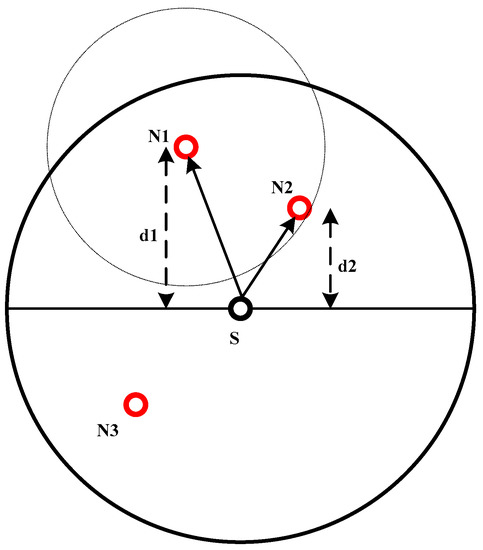
Figure 10.
Packet forwarding process in DBR.
DBR has some advantages. The employment of multi-sink helps reduce the energy consumption for nodes placed closer to the sink. Moreover, it does not require any location information as it calculates the depth locally. However, DBR does not provide efficient next forwarding node selection due to the lack of energy and reliable metrics. It uses only depth information in terms of forwarding and holding the data packet. Moreover, it still does not provide any solution to the communication void problem. Furthermore, it selects the shortest path based on depth information only, which has a direct impact on reducing the energy consumption due to always selecting the node with the lowest depth.
Based on DBR, a new routing protocol called Depth-Based Multi-hop Routing Protocol (DBMR) has been proposed [47]. This protocol tackles an energy-efficient routing problem in an underwater sensor network by using the multi-hop mode of each node to send packets, thereby reducing the communication cost. In addition, this protocol takes advantage of multiple sinks without introducing extra cost. DBMR consists of two phases, namely the route discovery phase and sending packets. In the route discovery phase, the process of selecting the next forwarding nodes has been designed as follows: each node discovers the next hop node by calculating its depth. Then, it broadcasts its ID and depth information as a control message. Next, it waits for a specific length of time to receive the reply message. After receiving the control message, the neighboring node will compare its depth with the depth included in the control message. The neighboring node will reply and forward the packet if its depth is less than the depth listed in the control message, as shown in Figure 11. This reply message consists of its weight (depth information and residual energy of the node) and ID using the equation , where is the depth of the current node and signifies the residual energy; otherwise, it will discard the message. After that, the largest weight ) node will be selected as the next hop by each node when the holding time is over and stored in the routing table. In the sending packets phase, sending the packet to the sink requires gathering information about the next hop node from the routing table and choosing the best one. Then, the data packet is transmitted to the selected node directly to avoid communication overhead.
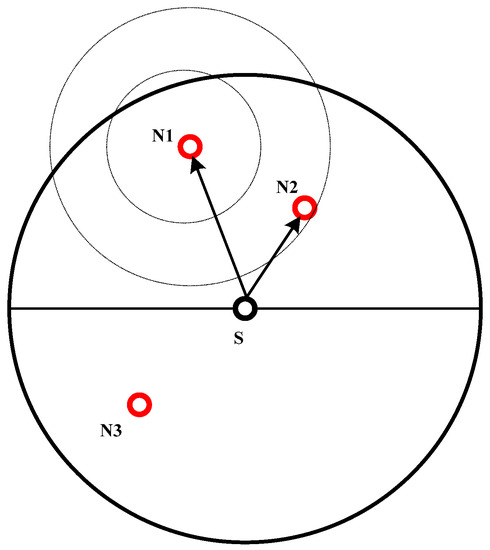
Figure 11.
Route discovery phase in DBMR.
The advantages of DBMR are highlighted as follows. The employment of multi-sink helps reduce the energy consumption for nodes placed closer to the sink. Moreover, the network lifetime has been improved because of the use of single-hop, next forwarding nodes selection. Furthermore, the use of residual energy during weight calculation has a direct impact on balancing the energy consumption. However, the key drawbacks of DBMR are: first, due to the lack of an efficient retransmission mechanism in DBMR, selecting only one next hop entails high energy consumption and end-to-end delay. Second, calculating the weight in DBMR is not efficient because it uses only residual energy metrics without taking into account link quality metrics, which promote packet loss. Third, DBMR suffers from the lack of a communication void avoidance algorithm. Last, the discovery phase should be updated with short intervals, leading to an increase in the network overhead.
Energy-Efficient Localization-Free Routing (EEDBR) Protocol is an enhancement of DBR aimed at improving the energy efficiency in UWSN [48]. Because of the replacement of the batteries, energy is one of the key issues in designing a routing protocol. For this purpose, an energy-efficient routing protocol has been proposed, called Energy-Efficient Localization-Free Routing Protocol (EEDBR). In terms of forwarding data packets, EEDBR utilizes the depth of the sensor nodes. Moreover, it takes into account the residual energy of the sensor nodes to improve network lifetime and reduce the energy consumption. EEDBR is divided into two phases, namely knowledge acquisition and data forwarding. During the knowledge acquisition phase the next forwarding node is selected. To this end, each node broadcasts a hello packet including its local depth information and residual energy to its neighbor nodes. Only the nodes that have less depth than the sender nodes store the data in their tables, sorted based on residual energy then depth information. In the data forwarding phase, the sender node broadcasts the packet, including the nodes’ ID, to its neighbors. Each node that receives the packets extracts the ID. If the node matches its ID with the ID embedded in the packets, it will calculate the holding time based on residual energy using the following equation:
where max_holding_time refers to the maximum holding time and p is the priority value. Then, it forwards the data packets after a certain holding time. Otherwise, it discards the packet. If the node overhears the packets, it generates a random number and compares it with the delivery ratio; if this number is less than the delivery ratio, it will drop the packets; otherwise, it will forward the data packets after the holding time finishes. On the other hand, if the node does not overhear the packets, it will forward the data packets after its holding time finishes.
The main advantage of EEDBR is that it employs multi-sink, which has a direct impact on balancing the energy between the nodes that are closer to the sink. Moreover, it uses local depth information only, without any expensive GPS or beacons. However, the disadvantages of EEDBR are discussed as follows. EEDBR utilizes only residual energy for selecting the next forwarding nodes and does not use any link quality metrics, which does not ensure energy-efficient and reliable routing. Moreover, it selects the node that has less depth than the sender based on residual energy, ignoring the depth of neighbors, which leads to an increase in the number of retransmissions and the number of hops. Furthermore, the knowledge acquisition phase should be updated with a short interval of time, which leads to high network overhead. Lastly, EEDBR does not take into account the communication void, which is considered a critical issue in selecting the next forwarding nodes.
Based on layering, Localization-Free Multi-Layered Routing Protocol (MRP) has been proposed by [49]. The author has introduced a new architecture based on Super Nodes. Super Nodes are connected directly with sink nodes placed on the water surface, as illustrated in Figure 12. Ordinary nodes are deployed at the bottom level of the water. These super nodes divide the area into layers using beacon messaging based on different transmission power. Thus, selecting the next forwarding nodes is based on layer ID (layer-by-layer), and each node calculates the holding time based on residual energy until reach super nodes. All the nodes that overhear the same packet will drop this packet and so on.
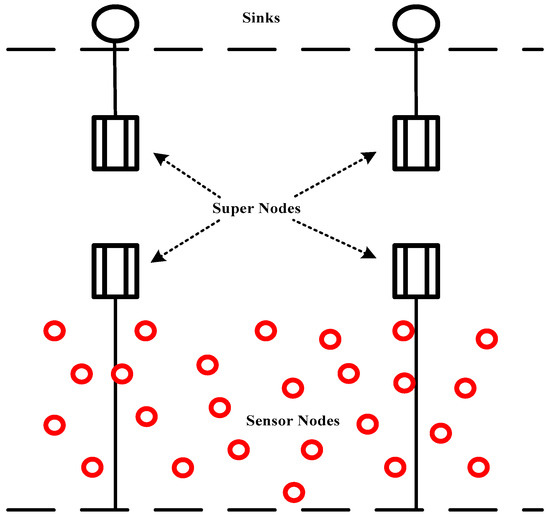
Figure 12.
The use of super nodes in MRP.
MRP is related to H2-DAB in that it uses the same layering technique. Moreover, layer ID in MRP is equivalent to Hop-ID in H2-DAB. It produced a better result than H2-DAB. Moreover, MRP solves communication void problem by introducing a new architecture which has been designed based on super nodes. However, MRP suffers from some problems. The proposed architecture consumes high energy consumption due to the use of super. Moreover, the super node uses max power to send the data packets to another Super Node that placed above. Thus, it results in high energy consumption. Furthermore, MRP did not take the link quality parameter into its account which has a direct effect on packet delivery ratio.
Physical Distance
The distance calculation is another important metric that have been utilized in some routing protocols. In non-localization routing protocols, routing protocols calculate the physical distance using two different mechanisms using becoming messages provided by the sink. The following paragraphs discuss the localization routing protocols belonging to this subcategory in detail.
Different from H2-DAB and 2H-ACK, another localization-free routing protocol using physical distance has been proposed by Wahid et al. [50], named Energy-Efficient Routing Using Physical Distance and Residual Energy (ERP2R). This protocol consists of two phases, namely cost establishment and data forwarding. Selecting the next forwarding nodes here involves sending beaconing messages from the sink that include the node ID, residual energy, and cost (physical distance to the sink), as shown in Figure 13. Then, each node that receives this message starts calculating the time to arrival to the sink (ToA) and updates the packets by adding its cost to the sink and residual energy. Then, it rebroadcasts this message with its node ID to its neighboring nodes; after receiving this message, the neighboring nodes start calculating their physical distance to this node and add their distance to the sender’s distance, and so on. During the data forwarding phase, the nodes with smallest physical distance than sender are eligible to forward the packets. Then, the node with the highest residual energy forwards the data packets.
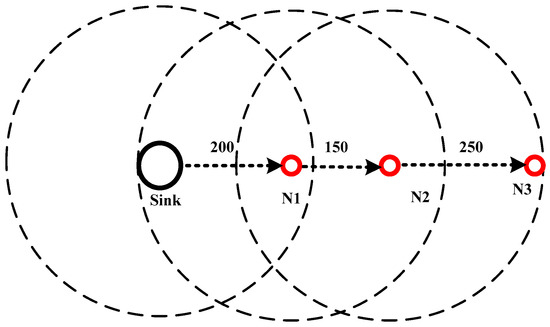
Figure 13.
Physical distance calculation in ERP2R.
ERP2R has some advantages. It does not require localization information for identifying the node’s position. Moreover, a multi-sink structure has been used in this protocol, which helps improve the performance of the protocol. Furthermore, the use of residual energy along with physical distance helps balance the energy between nodes. However, ERP2R also has some disadvantages. The first phase should be updated with a short interval of time, which leads to high network overhead. Moreover, this protocol does not solve the communication void problem. Furthermore, ERP2R does not utilize link quality for selecting the next forwarding nodes, whereas the use of link quality, along with residual energy and physical distance, helps improve the packet delivery ratio along with reducing the total energy consumption.
A physical distance location-free routing protocol named Reliable and Energy Efficient Routing Protocol (R-ERP2R) has been proposed as an extension version of an energy-efficient routing protocol for UWSNs using physical distance and residual energy (ERP2R) [51]. R-ERP2R aims to improve the reliability between nodes by selecting the next forwarding nodes based on link quality. Thus, it utilizes a reliable metric named Expected Transmission Count (ETX) [52], along with physical distance and residual energy. To this end, sensor nodes share residual energy between neighbors, and compute ETX and physical distance. Then, each node broadcasts this information to its neighbors. At the end of this step, each node will have information about its neighbors in terms of physical distance, ETX, and residual energy. Next, the sender node selects forwarding nodes that are closer to the sink node (in terms of physical distance) with high residual energy and good link quality. The node with minimum cost is the best node to forward the data packets, i.e., the cost is calculated based on ETX and residual energy using this equation: .
R-ERP2R has some advantages. It does not require localization information for identifying the node’s position. Moreover, the multi-sink structure has been used in this protocol, which helps improve the performance of the protocol. Furthermore, the use of physical distance along with residual energy and link quality helps balance the energy between nodes and further ensures data delivery. However, R-ERP2R has some disadvantages. Similar to ERP2R, the first phase should be updated with a short interval of time, which leads to high network overhead. Moreover, this protocol does not solve the communication void problem. Furthermore, the use of link quality with energy efficiency ensures better results than ERP2R, while the use of only ETX as a link quality metric is not sufficient due to only packet delivery ratio have been tested.
In order to reduce the energy consumption and the end-to-end delay, a hybrid beacon-pressure-based routing protocol named energy-efficient fitness-based (EEF) routing protocol is presented in which each node knows its location and sink location [53]. To choose the next forwarding nodes, each node in EEF calculates a fitness value using the distance to sink, the distance to neighboring nodes, depth information, and residual energy based on the following equation:
where is the forwarder–sink distance, is the sender–forwarder distance, is the sender–forwarder depth difference, and is the residual energy. The node then embeds the sender ID, fitness value, sender’s location information, and destination’s location information with the data packet and broadcasts it to its neighbors. If the fitness value embedded in with data packet is less than the receiver’s fitness, it can be a candidate for forwarding the data packets. Otherwise, it directly discards the packets. Moreover, the best forwarding node is the node with the highest fitness, i.e., the highest priority with lowest holding time.
The main advantage of EEF is that it uses a multi-sink structure, which helps improve the performance of the protocol. Moreover, it utilizes residual energy in calculating the fitness function. However, the main drawbacks of EEF can be highlighted as follows. First, the fitness value has been computed using additional full location information that is finding this information is too costly in an underwater environment. Second, it uses residual energy along with location information without considering any link quality metrics; this leads to unreliable data delivery and insufficient fitness. Third, it uses the same weight function to select the shortest path and suppress unnecessary forwarding, which is too costly in an underwater environment due to the use of full position information.
Another physical distance location-free routing protocol, named Distance-based Reliable and Energy-Efficient (DREE) routing protocol for UWSNs, has been proposed as an extension of R-ERP2R [54]. DREE aims at improving the reliability between nodes by selecting the next forwarding nodes based on link quality. Different from R-ERP2R, it utilizes a fuzzy-logic-based link Quality Estimator (F-LQE) [55] which has not been put to the test before in underwater networks along with physical distance. To this end, sensor nodes compute F-LQE and physical distance. Then, each node broadcasts this information to its neighbors. At the end of this step, each node will have information about its neighbors regarding physical distance and link quality. Next, the sender node selects the next forwarding nodes that are closer to the sink node (physical distance) with good link quality. The node with minimum cost is the best node to forward the data packets; the cost is calculated based on F-LQE and physical distance using this equation:
DREE has some advantages. It does not require localization information for identifying the node’s position. Moreover, the multi-sink structure has been used in this protocol, which helps in improving the performance of the protocol. Furthermore, the use of F-LQE as a link quality metric obtains a better performance than ETX. However, DREE also have some disadvantages. Similar to ERP2R and R-ERP2R, the first phase should be updated with a short interval of time, which leads to high network overhead. Moreover, this protocol does not solve the communication void problem. Furthermore, the use of F-LQE as a link quality metric is not efficient due to five parameters being tested, which leads to an increase in the end-to-end delay and further increases the network overhead. Last, DREE ignores residual energy, which is considered an important metric. Therefore, the total energy consumption has been dramatically increased.
Void-Aware
As discussed earlier, a communication void occurs when the data packet reaches some nods that do not have any neighbors. This problem has spurred researchers to design efficient, void-aware routing protocols that discover the void nodes and avoid them in the data packet forwarding process. The following paragraphs discuss the localization routing protocols belong to this subcategory in detail.
An efficient pressure-based routing algorithm for reliable underwater sensor networks has been designed, a hydraulic pressure based anycast routing protocol (HydroCast) [56]. This protocol addresses the major challenges that affect the ocean current (bandwidth and energy). HydroCast is divided into two modes: greedy routing and void handling. The greedy mode has the responsibility to select the next forwarding nodes. To this end, each receiving node calculates a link quality metric named Expected Packet Advance (EPA). After that, the nodes are sorted based on their depth information, i.e., the priority goes to nodes closer to the sink and then to those with a shorter holding time. Each forwarder node broadcasts the data packet embedded with the ID of its neighbors. The receiver nodes extract the ID list that is embedded in the data packet. If its ID is not on the list, it simply discards the packet. Otherwise, it calculates a holding time and sends a data packet based on this holding time. The nodes then try to overhear the data packet by providing the two-hop clustering technique. This technique is an enhanced version of the technique used in DBR. On the other hand, the void-handling mode tackles the communication void problem. To this end, if the data packets reach a void node (Local Maximum), they discover a detour from the void node to another shallower node. As shown in Figure 14, LM1 is a void node and is considered as a local maximum node. It discovers a detour path to another shallower node, LM2, and forwards the data packet to this node. LM2 is also considered a void node. Therefore, it discovers another node, S, and forwards the data packet to this node. S is a non-void node and can forward the data packet using the greedy mode.
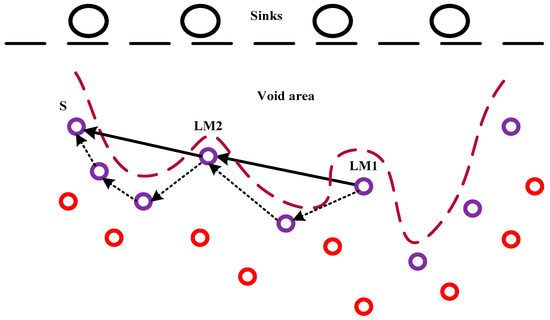
Figure 14.
Void handling in HydroCast.
The main advantages of HydroCast can be highlighted as follows. It provides a solution for the communication void problem. Moreover, it uses depth information locally for finding the position of the nodes. Lastly, it uses a multi-sink structure, which helps improve the performance of the protocol. However, the main drawbacks of HydroCast are: first, it does not take any energy metrics into account in forwarding nodes’ selection, whereas energy is one of the major issues that must be taken into consideration; second, the use of a two-hop clustering technique needs localization information, which causes high communication overhead; third, it employs two-hop neighbor information to suppress unnecessary forwarding based on beacon information, which leads to high energy consumption and high network overhead. Fourth, the void-handling technique used in this algorithm needs to be repeated, which again leads to high energy consumption and high network overhead.
A pressure beacon based routing protocol named Void-Aware Pressure Routing Protocol (VAPR) has been proposed to increase the energy efficiency and handle the communication void problem [38]. VAPR is divided into two main parts, namely enhanced beaconing and opportunistic directional data forwarding. In the first part, periodic beacon messages have been broadcasted from the water’s surface by each sonobuoy towards the bottom of the water. These periodic beacon messages contain a sequence number, hop count to sink and depth information, and direction of nodes to the sink. The information of each receiver node has been updated, and the direction has been identified towards the sinks based on the minimum hop to sink and depth information. Then, the receiver node updates the beacon and broadcasts the data packet. This process is continuously repeated until all nodes identify and update their next hop direction and their direction towards the sink based on hop count to sink and depth information. In the second part, the next forwarding nodes have been selected using both directions identified in the previous part, i.e., the nodes have been sorted based on hop distance to the sink. On the other hand, to deal with the communication void problem, the nodes have been assigned the direction DOWN, and the next forwarding nodes have been selected among deeper neighbors in void-handling nodes (i.e., node e). Nodes that have been assigned the direction UP (i.e., a) and the next forwarding nodes have been selected from among shallower neighbors in the greedy mode, as shown in Figure 15. In the second part, a directional opportunistic data forwarding algorithm is designed to forward the data packet. To this end, the data packet has been forwarded using the assigned direction that was identified in the first step for handling the communication void.
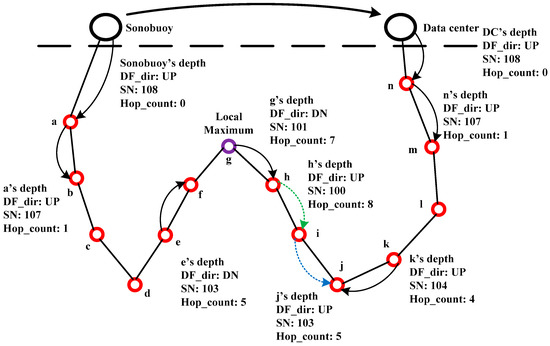
Figure 15.
Greedy mode and void-handling mode in VAPR.
The void-handling algorithm designed with a heuristic method in VAPR can be considered the main advantage of this protocol. Moreover, the employment of a multi-sink structure has a direct impact on the overall performance. The main weaknesses of VAPR can be highlighted as follows. First, in the enhanced beacon part, the direction of nodes should be updated within a short interval of time due to the dynamic topology in the UWSNs, which increases the energy consumption and network overhead; second, similar to HydroCast, the use of a two-hop clustering technique requires localization information for finding the two-hop neighboring nodes that have a direct impact on increasing the network overhead; finally, VAPR does not utilize link quality in discovering the void nodes that help in ensuring the data delivery.
Adaptive Mobility of Courier nodes in Threshold-optimized DBR Protocol (AMCTD) has been conducted to improve the energy efficiency by adding some courier nodes into the network architecture [57]. AMCTD is divided into three phases. The first two phases involve selecting the next forwarding nodes, whereas the third phase is for addressing the communication void problem. In the first phase (initialization), each node uses its depth and residual energy for computing its weight based on the following equation:
where priority is a constant value and and are the depth and residual energy of the node, respectively. Then, a hello packet is generated and shared between neighbors. Therefore, each node has information about its neighbors and saves this information in a table of next selection nodes. Moreover, courier nodes start moving in the vertical direction. In the second phase (data forwarding), each node checks its table of next selection nodes. If the courier node has been listed in the table, it directly forwards the data packet to the courier node and then sends an acknowledgment to avoid duplicate packet forwarding. Otherwise, the nodes in the table will be sorted based on their weight value and will broadcast the packet to these nodes. The nodes then calculate the holding time; the highest priority nodes have the lowest holding time. Upon overhearing the data packets, the nodes drop the packet. Otherwise, they wait for the data holding period to end before sending the data packets. This process is repeated until the data packets reach either the courier node or the sink node. In the last phase, if the number of dead nodes exceeds 2%, the communication void will have been increased. Therefore, the weight has been updated based on the depth rather than the residual energy using the equation . Moreover, if the number of dead nodes increases and the density further decreases, the courier movement and depth threshold will change in order to improve the network stability.
The advantages of AMCTD are as follows: it employs two different weight functions. The first is based on depth and residual energy in the initialization phase, whereas the second is based on depth information to handle the communication void. Moreover, the employment of a multi-sink structure has a direct impact on the overall performance. However, the main weaknesses of AMCTD can be highlighted as follows: first, courier nodes are expensive, which leads to an increase in the network cost; second, courier movement to handle the communication void problem is not efficient and reduces the overall routing performance; third, the use of a depth threshold reduces the performance when selecting the next forwarding nodes with different density and shortest path selection. Last, it did not employ a link quality metric in performing the weight calculation, which has a direct impact on the reliability of the network.
Another pressure beacon based routing protocol, named an Inherently Void Avoidance Routing (IVAR) Protocol for UWSNs, has been proposed to handle the communication void problem [11]. This protocol does not require full location information as it uses local depth information and number of hops to the sink. It can inherently avoid the void nodes without using recovery mode. IVAR is composed of two phases, namely route discovery, and data forwarding. In the first phase, sink nodes broadcast a beacon message to identify the hop count for each node. Then each node exchanges depth information with its neighbors. In the second phase, once source nodes have a data packet to send, they embed their ID, depth, packet sequence number, and hop count with the packet and broadcast it to their one-hop neighbors. The receiver node discards this packet if its hop count is higher than the hop count embedded in the data packets. Otherwise, it calculates the fitness value based on depth, transmission range, and hop count using the following equation:
where and indicate the depth of sender and receiver, respectively. Also, is the transmission range for each node. indicate the hop count number for the sender and receiver, respectively. Then, the receiver node calculates the forwarding time based on the fitness value.
The main advantage of IVAR is that it can handle the communication void without using void recovery mode. However, the main weaknesses of IVAR can be highlighted as follows. First, in the enhanced beacon part, the process of assigning a hop count should be updated within a short space of time due to the dynamic topology of the UWSNs, which increases the energy consumption and network overhead. Second, IVAR does not utilize residual energy and link quality in calculating the fitness value, which leads to an increase in energy consumption and a further reduction in the packet delivery ratio.
4.3. Comparative Analysis and Discussion
Due to the unique characteristics and harshness of an underwater environment, Opportunistic Routing is one of the most interesting routing techniques in UWSNs. Based on forwarding nodes selection, routing protocols can be divided into two categories, localization and non-localization routing protocols. However, the routing protocols in the localization category are not efficient. This is because finding location information in this category is costly due to the lack of GPS in an underwater environment. Therefore, the non-localization category is the most interesting for designing routing protocols for UWSNs. Based on data collection, non-localization routing protocols can be divided into two major subcategories, beacon-based and pressure-based. Beacon-based subcategory needs partial information provided by sink node. This information should be updated within a short space of time, which leads to high energy consumption and high overhead. Thus, beacon-based is not efficient in an underwater environment. On the other hand, in a pressure-based subcategory, the nodes are equipped with pressure sensors that are inexpensive and can calculate the depth information locally without using full or partial location information. This information can be employed for identifying the node’s position and the next forwarding nodes without imposing any extra network overhead. More precisely, finding the next forwarding nodes in the pressure-based subcategory does not require full location information or partial sink information. Therefore, the opportunistic pressure-based routing subcategory is the most promising and interesting routing method for UWSNs. Hence, this study focuses on designing an energy-efficient and reliable opportunistic pressure-based routing protocol for UWSNs.
In this paper, we have reviewed the most common routing protocols in UWSNs regarding selecting the forwarding nodes. We have summarized the existing well-known routing protocols in Table 1. In this table, the comparison between various routing protocols in UWSNs is simplified. The significance of each column is explained in the following.
- Category and Protocol: this field identifies our introduced categories and the names assigned by authors to the proposed protocols belonging to each category. The corresponding references are also provided here.
- Objectives: this field shows the main goal of the proposed algorithms, such as energy efficiency, reliability, and void handling.
- Modeling parameters: we have extracted the main metrics utilized in the existing routing protocols; each protocol uses different metrics in terms of selecting the next forwarding nodes.
- Neighbor selection strategy: the aim of this paper is to analyze the main issues in UWSNs regarding selecting the next forwarding nodes. Therefore, this column highlights the main techniques of how each protocol selects the next forwarding nodes.
- Forwarder selection strategy: this column points out how each protocol selects the best nodes among the candidates.

Table 1.
Features of routing protocols in UWSNs in terms of selecting the next forwarding nodes.
Table 2 provides full performance factors of the protocols, which includes a summary of the main behaviors of all protocols discussed above. This summarization is based on dependent factors used in selecting the next forwarding nodes, including residual energy, link quality, void-aware, reliability, multi-hop, shortest path, and sender/receiver-based.
Table 2.
Comparison of the main factors in routing protocols in UWSNs.
Selecting the next forwarding nodes and the best nodes to forward the data packets is a major problem in routing protocols that have a direct impact on overall routing performance such as energy consumption, packet delivery ratio, and network lifetime [14,58,59]. As shown in Table 1, localization routing protocols provide virtual shapes using location information from the sender node to the sink. This kind of solution is not efficient to use in UWSNs due to the cost of using localization and the lack of GPS. Moreover, most of the existing localization routing protocols select the best forwarding node based on its distance to the sink. Specifically, VBF, HH-VBF, VBVA, and FBR employ only the distance parameter. SEANAR and PER use the distance parameter along with the residual energy metric, whereas DFR utilizes the distance parameter along with link quality. On the other hand, non-localization beacon-based routing protocols select the next forwarding nodes using costly partial information (beacon messages provided by the sink). For instance, H2-DAB and 2H-ACK employ dynamic addressing based for selecting the next forwarding node. MRP and APCR employ layer ID along with residual energy. ERP2R utilizes physical distance with residual energy, whereas R-ERP2R utilizes physical distance along with residual energy and link quality for selecting the best candidate for forwarding the data packets. Finally, DREE utilizes physical distance along with link quality for selecting the best candidate for forwarding the data packets.
In contrast, selecting the next forwarding nodes in non-localization pressure-based routing protocols is very simple and can be identified locally. Each node can measure its depth locally using pressure sensors and can share this information with neighbors to identify the next forwarding nodes by selecting its shallower neighbor nodes. In other words, all neighbor nodes above the level of the sender are eligible to forward the data packets. Each protocol in this subcategory has different ways of selecting the next forwarding nodes. For instance, DBR selects the next forwarding nodes based on depth only. DBMR calculates a weight based on depth and residual energy and the node with the highest weight can be selected to forward the data packets. EEDBR uses depth and residual energy for selecting the best node by calculating the holding time based on residual energy. HydroCast employs depth and link quality for selecting the next forwarding nodes. EEF selects the next forwarding nodes by calculating a fitness value based on depth, distance, and residual energy, then choosing the highest fitness as the best forwarder. VAPR utilizes the hop count to the sink for selecting the best candidate. AMCTD calculates a weight for all neighbors based on depth and residual energy to select the best candidate. Finally, IVAR selects the best candidate based on the fitness value. Choosing the best next forwarding nodes has a significant impact on overall network performance and prevents the lower nodes’ performance to forward the packets. However, existing opportunistic energy-efficient and reliable pressure-based routing protocols in UWSNs suffer from a poor forwarding nodes selection algorithm based on multi-metrics. Therefore, it is essential to design a forwarding nodes selection algorithm based on multi-metrics, which selects energy-efficient and reliable forwarding nodes for non-localization pressure-based routing to reduce the energy consumption, reduce network traffic, and ensure data delivery.
5. Future Issues in Next Forwarding Node Selection in UWSNs
Forwarding nodes selection in UWSNs is a major challenge due to the use of acoustic waves, a communication medium that causes high energy consumption and low packet delivery ratio. Based on our comparative analysis and discussions, the future issues in next forwarding nodes selection can be listed as follows.
- Energy-efficient and reliable forwarding: the use of different metrics during the process of selecting the next forwarding nodes has a direct impact on the overall performance of the protocol [4,35]. Therefore, it is essential to design and develop an energy-efficient and reliable forwarding nodes selection algorithm based on residual energy and suitable link quality, to balance the energy consumption, improve the delivery ratio, and further optimize the network lifetime [7,15].
- Route cost calculation: as discussed previously, an efficient cost calculation has a direct impact on selecting the best node among neighbors [11,15]. Therefore, convenient route cost should be carefully designed using suitable metrics such as depth, link quality, and residual energy, which in turn improve the network lifetime and reduce network overhead.
- Security-aware forwarding: In military applications, security issues have become one of the major challenges in selecting the next forwarding nodes in UWSNs [14]. However, few studies have been conducted in this field. Hence, designing and developing a secure forwarding node selection algorithm is necessary to ensure data delivery [4,13].
- Congestion control-based forwarding: congestion is another important issue that affects path selection during the forwarding process [3]. However, this problem has not been addressed in the literature. Therefore, it is recommended to design and develop a congestion control algorithm to control packet loss in applications that suffer from this problem, such as event-driven data reporting models [2,8,9].
- Void-aware forwarding: Communication void is another major issue in selecting the next forwarding nodes and has a direct impact on the packet delivery ratio. However, existing void-handling algorithms in UWSNs have been divided into two groups. The first group attempts to find a recovery path, whereas the second group broadcasts beacon messages provided by the sink. These two kinds of solution consume high energy, increase end-to-end delay, and reduce the network lifetime [25,31]. Therefore, it is essential to design an efficient, void-aware forwarding algorithm that discovers the void nodes locally and avoids these nodes in the data forwarding process [15,38].
6. Conclusions
Next forwarding nodes selection is one of the fundamental issues in the design of routing protocols. This issue spurs researchers to design efficient and effective next forwarding node selection methods. In this paper, based on forwarding techniques, we have classified the routing protocols into different categories based on different points of view. We have comprehensively reviewed important and representative protocols in the selected literature. We have discussed each routing protocol, highlighting the next-hop selection method with its advantages and disadvantages. We have compared and summarized the routing protocols, considering their features and performance metrics. Finally, we have pointed out some important future research directions that need to be investigated further to develop an efficient next-hop selection method for routing in UWSNs.
Acknowledgments
This work was supported by the Ministry of Higher Education Malaysia in Collaboration with the Research Management Center at Faculty of Computing, Universiti Teknologi Malaysia (UTM).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. A survey on routing techniques in underwater wireless sensor networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Darehshoorzadeh, A.; Boukerche, A. Underwater sensor networks: A new challenge for opportunistic routing protocols. IEEE Commun. Mag. 2015, 53, 98–107. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.A.; Chizari, H.; Tariq, M.; Bamatraf, A. Pressure Based Routing Protocol for Underwater Wireless Sensor Network: A Survey. KSII Trans. Internet Inform. Syst. 2015, 9, 504–527. [Google Scholar]
- Zeng, D.; Wu, X.; Wang, Y.; Chen, H.; Liang, K.; Shu, L. A Survey on Sensor Deployment in Underwater Sensor Networks. In Proceedings of the China Conference Wireless Sensor Networks, Qingdao, China, 17–19 October 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 133–143. [Google Scholar]
- Biswas, S.; Morris, R. ExOR: Opportunistic multi-hop routing for wireless networks. ACM SIGCOMM Comput. Commun. Rev. 2005, 35, 133–144. [Google Scholar] [CrossRef]
- Javidi, T.; van Buhler, E. Opportunistic Routing in Wireless Networks. Found. Trends Netw. 2016, 10. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. On the design of green protocols for underwater sensor networks. IEEE Commun. Mag. 2016, 54, 67–73. [Google Scholar] [CrossRef]
- Raina, U.Z.; Sarangal, H.; Soni, N. A Review on Underwater Wireless Sensor Networks. Wirel. Commun. 2016, 8, 119–123. [Google Scholar]
- Jouhari, M.; Ibrahimi, K.; Benattou, M.; Kobbane, A. New greedy forwarding strategy for UWSNs geographic routing protocols. In Proceedings of the IEEE 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 388–393.
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. An inherently void avoidance routing protocol for Underwater Sensor Networks. In Proceedings of the IEEE 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015; pp. 361–365.
- Coutinho, R.W.; Vieira, L.F.; Loureiro, A.A. DCR: Depth-controlled routing protocol for underwater sensor networks. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013.
- Li, N.; Martínez, J.-F.; Meneses Chaus, J.M.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed]
- Kheirabadi, M.T.; Mohamad, M.M. Greedy routing in underwater acoustic sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2013, 2013, 701834. [Google Scholar] [CrossRef]
- Zenia, N.Z.; Aseeri, M.; Ahmed, M.R.; Chowdhury, Z.I.; Kaiser, M.S. Energy-efficiency and Reliability in MAC and Routing Protocols for Underwater Wireless Sensor Network: A Survey. J. Netw. Comput. Appl. 2016, 71, 72–85. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing protocols for underwater wireless sensor networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. State-of-the-art in protocol research for underwater acoustic sensor networks. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 23–29 September 2006; pp. 7–16.
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the 2006 IEEE Wireless Communications and Networking Conference (WCNC 2006), Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 228–235.
- Melodia, T.; Kulhandjian, H.; Kuo, L.-C.; Demirors, E. Advances in underwater acoustic networking. In Mobile Ad Hoc Networking: Cutting Edge Directions; John Wiley & Sons, Inc.: New York, NY, USA, 2013; Volume 852. [Google Scholar]
- Casari, P.; Zorzi, M. Protocol design issues in underwater acoustic networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Stojanovic, M. Acoustic (underwater) communications. In Encyclopedia of Telecommunications; John Wiley & Sons, Inc.: New York, NY, USA, 2003. [Google Scholar]
- Brekhovskikh, L.M.; Lysanov, I.U.R.P.; Lysanov, Y.P. Fundamentals of Ocean Acoustics; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.-H.; Shi, Z. Void avoidance in three-dimensional mobile underwater sensor networks. In Proceedings of the International Conference on Wireless Algorithms, Systems, and Applications, Boston, MA, USA, 16–18 August 2009; pp. 305–314.
- Yu, Y.; Govindan, R.; Estrin, D. Geographical and Energy Aware Routing: A Recursive Data Dissemination Protocol for Wireless Sensor Networks; Technical Report UCLA/CSD-TR-01-0023; UCLA Computer Science Department: Los Angeles, CA, USA, 2001. [Google Scholar]
- Casari, P.; Marella, S.; Zorzi, M. A comparison of multiple access techniques in clustered underwater acoustic networks. In Proceedings of the 2007 IEEE OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007. [CrossRef]
- Yuh, J. Design and control of autonomous underwater robots: A survey. Auton. Robots 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Ovaliadis, K.; Savage, N.; Kanakaris, V. Energy efficiency in underwater sensor networks: A research review. J. Eng. Sci. Technol. Rev. 2010, 3, 151–156. [Google Scholar]
- Schaefer, G.; Ingelrest, F.; Vetterli, M. Potentials of opportunistic routing in energy-constrained wireless sensor networks. In Proceedings of the European Conference on Wireless Sensor Networks, Cork, Ireland, 11–13 February 2009; pp. 118–133.
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.-H.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the 2007 IEEE OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007. [CrossRef]
- Akkaya, K.; Younis, M. A survey on routing protocols for wireless sensor networks. Ad Hoc Netw. 2005, 3, 325–349. [Google Scholar] [CrossRef]
- Al-Karaki, J.N.; Kamal, A.E. Routing techniques in wireless sensor networks: A survey. IEEE Wirel. Commun. 2004, 11, 6–28. [Google Scholar] [CrossRef]
- Cui, J.-H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Chakchouk, N. A survey on opportunistic routing in wireless communication networks. IEEE Commun. Surv. Tutor. 2015, 17, 2214–2241. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.-H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the International Conference on Research in Networking, Singapore, 5–9 May 2008; pp. 72–86.
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mobile Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Wu, X.; Chen, G.; Chen, J. Energy-efficient and topology-aware routing for underwater sensor networks. In Proceedings of the 2010 19th International Conference on Computer Communications and Networks (ICCCN), Zürich, Switzerland, 2–5 August 2010; pp. 1–6.
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater acoustic networks. In Proceedings of the 3rd ACM International Workshop on Underwater Networks, San Francisco, CA, USA, 14–19 September 2008; pp. 75–82.
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the 2008 IEEE OCEANS, Quebec, QC, Canada, 15–18 September 2008; pp. 1–7.
- Xie, P.; Cui, J.-H.; Lao, L. VBF: Vector-based forwarding protocol for underwater sensor networks. In Proceedings of the International Conference on Research in Networking, Vancouver, BC, Canada, 3–6 July 2006; pp. 1216–1221.
- Huang, C.-J.; Wang, Y.-W.; Liao, H.-H.; Lin, C.-F.; Hu, K.-W.; Chang, T.-Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Ayaz, M.; Abdullah, A. Hop-by-hop dynamic addressing based (H2-DAB) routing protocol for underwater wireless sensor networks. In Proceedings of the International Conference on Information and Multimedia Technology (ICIMT’09), Jeju Island, Korea, 16–18 December 2009; pp. 436–441.
- Ayaz, M.; Abdullah, A.; Faye, I. Hop-by-hop reliable data deliveries for underwater wireless sensor networks. In Proceedings of the 2010 International Conference on Broadband, Wireless Computing, Communication and Applications (BWCCA), Fukuoka, Japan, 4–6 November 2010; pp. 363–368.
- Al-Bzoor, M.; Zhu, Y.; Liu, J.; Ammar, R.; Cui, J.-H.; Rajasekaran, S. An adaptive power controlled routing protocol for underwater sensor network. Int. J. Sens. Netw. 2015, 18, 238–249. [Google Scholar] [CrossRef]
- Liu, G.; Li, Z. Depth-based multi-hop routing protocol for underwater sensor network. In Proceedings of the 2010 2nd International Conference on Industrial Mechatronics and Automation (ICIMA), Wuhan, China, 30–31 May 2010; Volume 2, pp. 268–270.
- Wahid, A.; Kim, D. An energy efficient localization-free routing protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2012, 2012, 307246. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D.; Lim, K.-S. MRP: A localization-free multi-layered routing protocol for underwater wireless sensor networks. Wirel. Pers. Commun. 2014, 77, 2997–3012. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D. An energy-efficient routing protocol for UWSNs using physical distance and residual energy. In Proceedings of the 2011 IEEE OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–6.
- Wahid, A.; Lee, S.; Kim, D. A reliable and energy-efficient routing protocol for underwater wireless sensor networks. Int. J. Commun. Syst. 2014, 27, 2048–2062. [Google Scholar] [CrossRef]
- De Couto, D.S.; Aguayo, D.; Bicket, J.; Morris, R. A high-throughput path metric for multi-hop wireless routing. Wirel. Netw. 2005, 11, 419–434. [Google Scholar] [CrossRef]
- Ashrafuddin, M.; Islam, M.M.; Mamun-or-Rashid, M. Energy Efficient Fitness Based Routing Protocol for Underwater Sensor Network. Int. J. Intell. Syst. Appl. 2013, 5, 61–69. [Google Scholar] [CrossRef]
- Tariq, M.; ShafieAbd Latiff, M.; Ayaz, M.; Coulibaly, Y.; Al-Areqi, N. Distance based reliable and energy efficient (DREE) routing protocol for underwater acoustic sensor networks. J. Netw. 2015, 10, 311–321. [Google Scholar] [CrossRef]
- Baccour, N.; Koubâa, A.; Youssef, H.; Jamâa, M.B.; Do Rosario, D.; Alves, M.; Becker, L.B. F-lqe: A fuzzy link quality estimator for wireless sensor networks. In Proceedings of the European Conference on Wireless Sensor Networks, Coimbra, Portugal, 17–19 February 2010; pp. 240–255.
- Lee, U.; Wang, P.; Noh, Y.; Vieira, L.F.M.; Gerla, M.; Cui, J.-H. Pressure Routing for Underwater Sensor Networks. In Proceedings of the 2010 INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1676–1684.
- Jafri, M.R.; Ahmed, S.; Javaid, N.; Ahmad, Z.; Qureshi, R. Amctd: Adaptive mobility of courier nodes in threshold-optimized DBR protocol for underwater wireless sensor networks. In Proceedings of the 2013 Eighth International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Compiegne, France, 28–30 October 2013; pp. 93–99.
- Dubois-Ferriere, H.; Grossglauser, M.; Vetterli, M. Least-Cost Opportunistic Routing; EPFL Technical Report LCAV-REPORT-2007-001; EPFL: Lausanne, Switzerland, 2007. [Google Scholar]
- Liu, H.; Zhang, B.; Mouftah, H.T.; Shen, X.; Ma, J. Opportunistic routing for wireless ad hoc and sensor networks: Present and future directions. IEEE Commun. Mag. 2009, 47, 103–109. [Google Scholar] [CrossRef]
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).