



Investigating Service Robot Acceptance Factors: The Role of Emotional Design, Communication Style, and Gender Groups


Abstract
1. Introduction
2. Literature Review and Hypotheses
2.1. SR Overview and Theoretical Framework
2.2. The CASA Theoretical Perspective on SRs
2.2.1. Utility
2.2.2. Autonomy
2.2.3. Personification
2.2.4. Communication Style
2.3. The KE Perspective on SRs
2.3.1. Cuteness
2.3.2. Coolness
2.3.3. Warmth
2.3.4. Novelty
2.4. Social Presence and Usage Intention
2.4.1. The Mediating Role of Social Presence
2.4.2. Determinants of Usage Intention
3. Research Methods
3.1. Measurement Tools
3.2. Data Collection
3.3. Data Analysis
4. Results
4.1. Common Method Bias (CMB)
4.2. Measurement Model
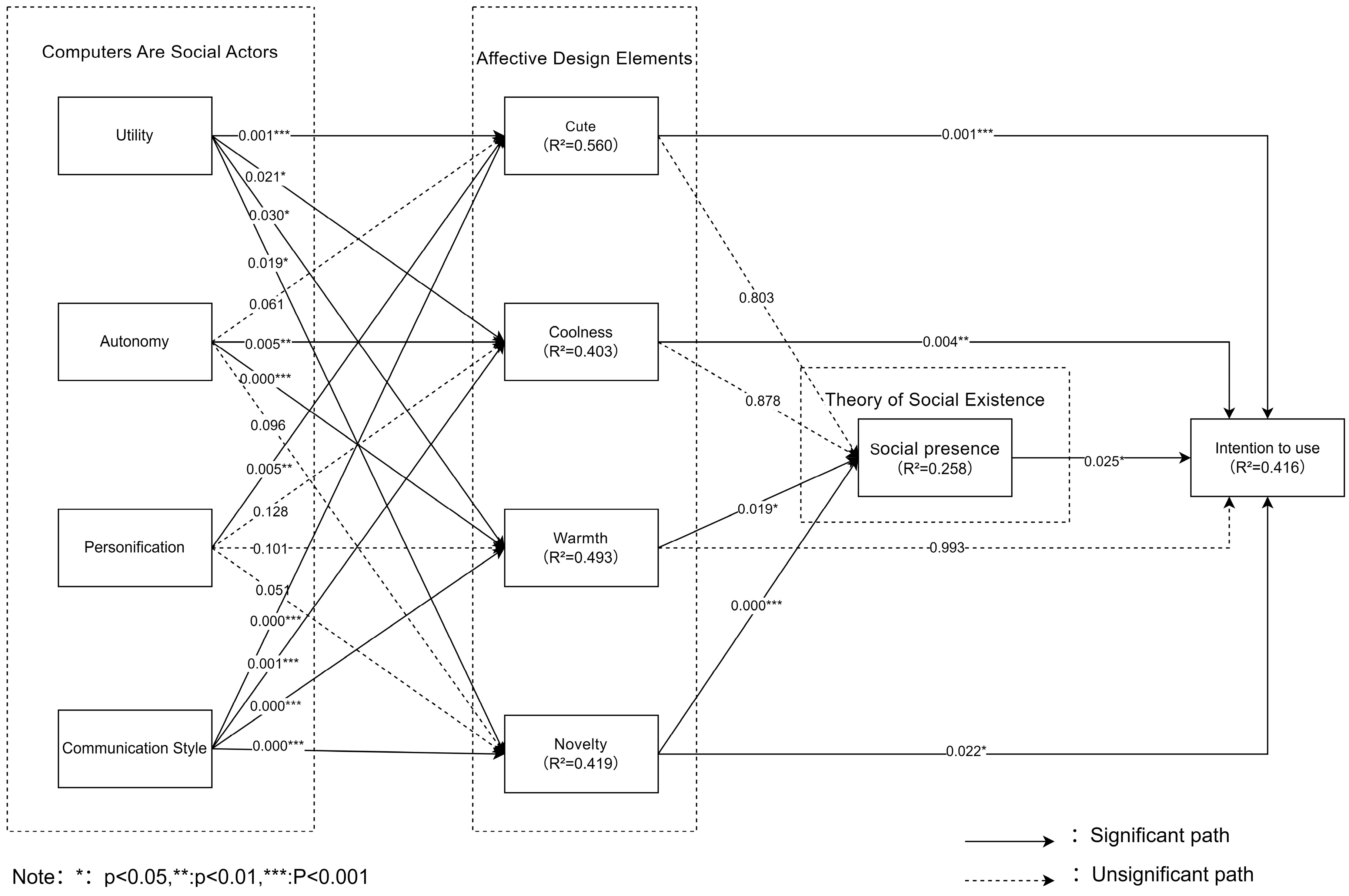
4.3. Structural Model
4.4. MGA Multi-Group Analysis
5. Discussion
5.1. Main Model
5.1.1. CASA Attributes
5.1.2. Kansei Elements
5.1.3. Analysis of Social Presence Mediation Pathways
5.2. Gender as a Critical Moderator
5.3. Implications and Suggestions
5.3.1. Theoretical Implications
5.3.2. Design Suggestions
6. Conclusions and Future Works
6.1. Conclusions
6.2. Limitations and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Study | Context/Setting | Main Variables | Theory |
|---|---|---|---|
| Sharma et al. [50] | Restaurant SRs | Novelty | PLS-SEM Machine learning (ML) |
| Perceived enjoyment | |||
| Perceived usefulness | |||
| Service speed | |||
| Repeated experience | |||
| Trust | |||
| Ruiz-Equihua et al. [12] | SRs | Social cognition | CASA Social cognition theory (SCT) TAM |
| Psychological ownership | |||
| Anthropomorphism | |||
| Belanche et al. [18] | SRs | Human-likeness | PLS-SEM High-velocity learning model (HVL) |
| Perceived competence | |||
| Perceived warmth | |||
| Service value expectations | |||
| Loyalty intentions | |||
| Huang et al. [28] | Hospitality SRs | Cuteness | Stimulus–organism–response framework (S-O-R) PLS-SEM |
| Interactivity | |||
| Coolness | |||
| Courtesy | |||
| Utility | |||
| Autonomy | |||
| Positive affect | |||
| Negative affect | |||
| Acceptance | |||
| Gan et al. [26] | SRs | Aesthetics and preference evaluation | KE Affective design theory (ADT) User perception theory (UPT) |
| Aesthetic features | |||
| Emotional features | |||
| Feature mapping relationship | |||
| Physical attribute 1 | |||
| Physical attribute 2 | |||
| Kansei word 1 | |||
| Kansei word 2 | |||
| Design and generation Process | |||
| Network training | |||
| Image generation | |||
| Detailed design | |||
| New social robot | |||
| Chen et al. [78] | SRs | Perceived privacy risk | Communication privacy management theory (CPMT) Stimulus–organism–response framework (S-O-R) PLS-SEM Fuzzy-set qualitative comparative analysis (FsQCA) |
| Perceived privacy control | |||
| Anthropomorphism | |||
| Warmth | |||
| Competence | |||
| Transparency | |||
| Privacy concerns | |||
| Choi et al. [79] | SRs | Warmth | PLS-SEM Anthropomorphism theory (AT) |
| Apology | |||
| Explanation | |||
| Competence | |||
| Recovery efforts | |||
| Human–robot collaboration | |||
| Satisfaction/intention to use | |||
| Coronado et al. [42] | Social and SRs | Kansei design | CASA Trust theory SPT |
| User emotion | |||
| User experience satisfaction | |||
| Gao et al. [3] | Domestic SRs | User acceptance | TAM SPT Consumer behavior theory (CBT) |
| Human–robot interaction | |||
| Social presence | |||
| Yim et al. [43] | Humanoid SRs | Trust | CASA Trust theory (TT) SPT |
| Social presence | |||
| User satisfaction |
| Demographic | Item | Subject (N = 318) | |
|---|---|---|---|
| Frequency | Percentage | ||
| Gender | Male | 108 | 34% |
| Female | 210 | 66% | |
| Age | 0–20 years | 69 | 21.70% |
| 21–30 years | 203 | 63.80% | |
| 31–40 years | 20 | 6.30% | |
| 41–50 years | 14 | 4.40% | |
| 51–60 years | 10 | 3.10% | |
| >60 years | 2 | 0.60% | |
| Occupation | Civil servant | 9 | 2.80% |
| State-owned enterprise | 21 | 6.60% | |
| Private enterprise | 54 | 17.00% | |
| Public institution | 21 | 6.60% | |
| Foreign company | 5 | 1.60% | |
| Student | 208 | 65.40% | |
| Education Level | Undergraduate | 175 | 55.00% |
| Doctoral | 4 | 1.30% | |
| Junior high school | 5 | 1.60% | |
| Vocational/technical/high school | 15 | 4.70% | |
| Master’s degree | 87 | 27.40% | |
| Associate’s degree | 32 | 10.10% | |
| Construct | Items | Mean | St.Dev. | Factor Loading | Cronbach’s Alpha | CR (rho_a) | CR (rho_c) | AVE |
|---|---|---|---|---|---|---|---|---|
| Utility | UT1 | 5.566 | 1.016 | 0.849 | 0.803 | 0.804 | 0.884 | 0.717 |
| UT2 | 5.503 | 1.095 | 0.839 | |||||
| UT3 | 5.321 | 1.266 | 0.853 | |||||
| Autonomy | AT1 | 5.283 | 1.114 | 0.779 | 0.728 | 0.729 | 0.847 | 0.648 |
| AT2 | 5.349 | 1.179 | 0.789 | |||||
| AT3 | 5.258 | 1.212 | 0.845 | |||||
| Personification | PSN1 | 4.679 | 1.402 | 0.721 | 0.753 | 0.8 | 0.858 | 0.669 |
| PSN2 | 5.091 | 1.195 | 0.835 | |||||
| PSN3 | 5.387 | 1.199 | 0.889 | |||||
| Communication | CS1 | 5.16 | 1.344 | 0.862 | 0.866 | 0.873 | 0.918 | 0.789 |
| CS2 | 5.393 | 1.266 | 0.905 | |||||
| CS3 | 5.377 | 1.247 | 0.896 | |||||
| Cute | CT1 | 5.557 | 1.203 | 0.85 | 0.81 | 0.818 | 0.887 | 0.724 |
| CT2 | 5.503 | 1.129 | 0.823 | |||||
| CT3 | 5.566 | 1.138 | 0.879 | |||||
| Coolness | CL1 | 5.56 | 1.182 | 0.904 | 0.789 | 0.79 | 0.904 | 0.826 |
| CL3 | 5.557 | 1.155 | 0.914 | |||||
| Warmth | WT1 | 5.61 | 1.146 | 0.861 | 0.786 | 0.792 | 0.875 | 0.7 |
| WT2 | 5.629 | 1.16 | 0.839 | |||||
| WT3 | 5.516 | 1.212 | 0.809 | |||||
| Novelty | NO2 | 5.497 | 1.115 | 0.877 | 0.741 | 0.748 | 0.885 | 0.794 |
| NO3 | 5.774 | 1.081 | 0.905 | |||||
| Social presence | SP1 | 5.78 | 1.08 | 0.854 | 0.783 | 0.791 | 0.873 | 0.697 |
| SP2 | 5.686 | 1.239 | 0.787 | |||||
| SP3 | 5.843 | 0.997 | 0.861 | |||||
| Intention to use | INT1 | 5.761 | 1.012 | 0.879 | 0.709 | 0.709 | 0.873 | 0.774 |
| INT2 | 5.459 | 1.126 | 0.881 |
| Construct | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Personification | 0.818 | |||||||||
| Intention to use | 0.384 | 0.88 | ||||||||
| Cute | 0.623 | 0.583 | 0.851 | |||||||
| Utility | 0.527 | 0.513 | 0.623 | 0.847 | ||||||
| Novelty | 0.543 | 0.548 | 0.69 | 0.524 | 0.891 | |||||
| Communication | 0.669 | 0.551 | 0.657 | 0.58 | 0.574 | 0.888 | ||||
| Warmth | 0.559 | 0.503 | 0.69 | 0.573 | 0.662 | 0.582 | 0.836 | |||
| Social presence | 0.4 | 0.394 | 0.394 | 0.355 | 0.476 | 0.338 | 0.446 | 0.835 | ||
| Autonomy | 0.598 | 0.422 | 0.555 | 0.656 | 0.487 | 0.466 | 0.599 | 0.436 | 0.805 | |
| Coolness | 0.508 | 0.536 | 0.667 | 0.531 | 0.594 | 0.54 | 0.688 | 0.36 | 0.516 | 0.909 |
| Construct | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Personification | ||||||||||
| Intention to use | 0.502 | |||||||||
| Cute | 0.772 | 0.768 | ||||||||
| Utility | 0.662 | 0.679 | 0.771 | |||||||
| Novelty | 0.702 | 0.753 | 0.886 | 0.678 | ||||||
| Communication | 0.798 | 0.702 | 0.774 | 0.691 | 0.708 | |||||
| Warmth | 0.71 | 0.666 | 0.854 | 0.713 | 0.859 | 0.695 | ||||
| Social presence | 0.529 | 0.527 | 0.491 | 0.449 | 0.619 | 0.404 | 0.569 | |||
| Autonomy | 0.811 | 0.587 | 0.722 | 0.859 | 0.66 | 0.587 | 0.793 | 0.581 | ||
| Coolness | 0.646 | 0.715 | 0.829 | 0.667 | 0.773 | 0.651 | 0.87 | 0.459 | 0.679 |
| H | Cause | Effect | β | T | p | Result |
|---|---|---|---|---|---|---|
| H1a | Utility | Cute | 0.254 | 3.375 | 0.001 | Supported |
| H1b | Utility | Novelty | 0.177 | 2.355 | 0.019 | Supported |
| H1c | Utility | Warmth | 0.157 | 2.167 | 0.03 | Supported |
| H1d | Utility | Coolness | 0.187 | 2.31 | 0.021 | Supported |
| H2a | Autonomy | Cute | 0.117 | 1.875 | 0.061 | Not supported |
| H2b | Autonomy | Novelty | 0.128 | 1.667 | 0.096 | Not supported |
| H2c | Autonomy | Warmth | 0.299 | 4.754 | 0 | Supported |
| H2d | Autonomy | Coolness | 0.204 | 2.789 | 0.005 | Supported |
| H3a | Personification | Cute | 0.208 | 2.804 | 0.005 | Supported |
| H3b | Personification | Novelty | 0.177 | 1.951 | 0.051 | Not supported |
| H3c | Personification | Warmth | 0.113 | 1.642 | 0.101 | Not supported |
| H3d | Personification | Coolness | 0.114 | 1.523 | 0.128 | Not supported |
| H4a | Communication | Cute | 0.316 | 4.191 | 0 | Supported |
| H4b | Communication | Novelty | 0.293 | 3.871 | 0 | Supported |
| H4c | Communication | Warmth | 0.276 | 3.631 | 0 | Supported |
| H4d | Communication | Coolness | 0.260 | 3.275 | 0.001 | Supported |
| H5a | Cute | Intention to use | 0.279 | 3.255 | 0.001 | Supported |
| H5b | Cute | Social presence | 0.023 | 0.25 | 0.803 | Not supported |
| H6a | Coolness | Intention to use | 0.199 | 2.848 | 0.004 | Supported |
| H6b | Coolness | Social presence | 0.012 | 0.153 | 0.878 | Not supported |
| H7a | Warmth | Intention to use | −0.001 | 0.008 | 0.993 | Not supported |
| H7b | Warmth | Social presence | 0.217 | 2.339 | 0.019 | Supported |
| H8a | Novelty | Intention to use | 0.177 | 2.299 | 0.022 | Supported |
| H8b | Novelty | Social presence | 0.310 | 3.883 | 0 | Supported |
| H9a | Social presence | Intention to use | 0.128 | 2.237 | 0.025 | Supported |
References
- Balaji, M.S.; Jiang, Y.; Zhang, X. Robots in service: How robot capabilities and personalities drive customer value co-creation and satisfaction. Int. J. Contemp. Hosp. Manag. 2025, 37, 1016–1035. [Google Scholar] [CrossRef]
- Chang, S.-T. Influence of robot coolness and affinity on behavioral intention: Examining perceived value as a mediating factor. J. Hosp. Tour. Technol. 2024, 15, 825–841. [Google Scholar] [CrossRef]
- Gao, Y.; Chang, Y.; Yang, T.; Yu, Z. Consumer acceptance of social robots in domestic settings: A human-robot interaction perspective. J. Retail. Consum. Serv. 2025, 82, 104075. [Google Scholar] [CrossRef]
- Chi, O.H.; Chi, C.G.; Gursoy, D.; Nunkoo, R. Customers’ acceptance of artificially intelligent service robots: The influence of trust and culture. Int. J. Inf. Manag. 2023, 70, 102623. [Google Scholar] [CrossRef]
- Blut, M.; Wang, C.; Wünderlich, N.V.; Brock, C. Understanding anthropomorphism in service provision: A meta-analysis of physical robots, chatbots, and other AI. J. Acad. Mark. Sci. 2021, 49, 632–658. [Google Scholar] [CrossRef]
- Jörling, M.; Böhm, R.; Paluch, S. Service robots: Drivers of perceived responsibility for service outcomes. J. Serv. Res. 2019, 22, 404–420. [Google Scholar] [CrossRef]
- Janson, A. How to leverage anthropomorphism for chatbot service interfaces: The interplay of communication style and personification. Comput. Hum. Behav. 2023, 149, 107954. [Google Scholar] [CrossRef]
- Kim, K.J.; Park, E.; Sundar, S.S. Caregiving role in human–robot interaction: A study of the mediating effects of perceived benefit and social presence. Comput. Hum. Behav. 2013, 29, 1799–1806. [Google Scholar] [CrossRef]
- Maeiro, J.; Dias, Á.; Pereira, L. Cuteness vs. usefulness: A dual perspective on service robot acceptance in the travel industry. J. Theor. Appl. Electron. Commer. Res. 2025, 20, 48. [Google Scholar] [CrossRef]
- Alam, A.; Lwin, M.; Khan, A.; Mubin, O. Impact of robot size and number on human–robot persuasion. Information 2024, 15, 782. [Google Scholar] [CrossRef]
- Alma Çallı, B.; Çallı, L.; Sarı Çallı, D.; Çallı, F. The impact of different types of service-robot usage in hotels on guests’ intention to stay. J. Hosp. Tour. Technol. 2023, 14, 53–68. [Google Scholar] [CrossRef]
- Ruiz-Equihua, D.; Romero, J.; Loureiro, S.M.C.; Ali, M. Human–robot interactions in the restaurant setting: The role of social cognition, psychological ownership and anthropomorphism. Int. J. Contemp. Hosp. Manag. 2023, 35, 1966–1985. [Google Scholar] [CrossRef]
- Kim, J.; Im, I. Anthropomorphic response: Understanding interactions between humans and artificial-intelligence agents. Comput. Hum. Behav. 2023, 139, 107512. [Google Scholar] [CrossRef]
- Yu, X.; Xu, Z.; Song, Y.; Liu, X. The cuter, the better? The impact of cuteness on intention to purchase AI voice assistants: A moderated serial-mediation model. Front. Psychol. 2022, 13, 1036848. [Google Scholar] [CrossRef]
- Wu, J.-J.; Chang, S.-T.; Lin, Y.-P.; Lin, T.M.Y. Examining how coolness of service robots influences customers’ delight: Mediating role of perceived values. J. Hosp. Tour. Insights 2024, 7, 2624–2642. [Google Scholar] [CrossRef]
- Alves-Oliveira, P.; Orr, A.; Björling, E.A.; Cakmak, M. Connecting the dots of social-robot design from interviews with robot creators. Front. Robot. AI 2022, 9, 720799. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Felici, E.; Cavallo, F.; Amabili, G.; Maranesi, E. Designing acceptable robots for assisting older adults: A pilot study on the willingness to interact. Int. J. Environ. Res. Public Health 2021, 18, 10686. [Google Scholar] [CrossRef]
- Belanche, D.; Casaló, L.V.; Schepers, J.; Flavián, C. Examining the effects of robots’ physical appearance, warmth, and competence in frontline services: The humanness-value-loyalty model. Psychol. Mark. 2021, 38, 2357–2376. [Google Scholar] [CrossRef]
- Huang, D.; Chen, Q.; Huang, J.; Kong, S.; Li, Z. Customer-robot interactions: Understanding customer experience with service robots. Int. J. Hosp. Manag. 2021, 99, 103078. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Marangunić, N.; Granić, A. Technology acceptance model: A literature review from 1986 to 2013. Univ. Access Inf. Soc. 2014, 14, 81–95. [Google Scholar] [CrossRef]
- Pal, D.; Babakerkhell, M.D.; Papasratorn, B.; Funilkul, S. Intelligent attributes of voice assistants and users’ love for AI: A SEM-based study. IEEE Access 2023, 11, 60889–60903. [Google Scholar] [CrossRef]
- Gu, C.; Zhang, Y.; Zeng, L. Exploring the mechanism of sustained consumer trust in AI chatbots after service failures: A perspective based on attribution and CASA theories. Humanit. Soc. Sci. Commun. 2024, 11, 1400. [Google Scholar] [CrossRef]
- Nass, C.; Moon, Y.; Fogg, B.J.; Reeves, B.; Dryer, D.C. Can computer personalities be human personalities? Int. J. Hum.–Comput. Stud. 1995, 43, 223–239. [Google Scholar] [CrossRef]
- Nagamachi, M. Kansei engineering and comfort. Int. J. Ind. Ergon. 1997, 19, 79–80. [Google Scholar] [CrossRef]
- Gan, Y.; Ji, Y.; Jiang, S.; Liu, X.; Feng, Z.; Li, Y.; Liu, Y. Integrating aesthetic and emotional preferences in social-robot design: An affective-design approach with Kansei engineering and deep convolutional generative adversarial network. Int. J. Ind. Ergon. 2021, 83, 103128. [Google Scholar] [CrossRef]
- Song, C.S.; Kim, Y.-K. The role of the human-robot interaction in consumers’ acceptance of humanoid retail service robots. J. Bus. Res. 2022, 146, 329–339. [Google Scholar] [CrossRef]
- Huang, D.; Chen, Q.; Huang, S.; Liu, X. Consumer intention to use service robots: A cognitive–affective–conative framework. Int. J. Contemp. Hosp. Manag. 2024, 36, 1275–1298. [Google Scholar] [CrossRef]
- Shehawy, Y.M.; Ali Khan, S.M.F.; Khalufi, N.A.M.; Abdullah, R.S. Customer adoption of robot: Synergizing customer acceptance of robot-assisted retail technologies. J. Retail. Consum. Serv. 2025, 82, 104062. [Google Scholar] [CrossRef]
- Liu, X.; Yi, X.; Wan, L.C. Friendly or competent? The effects of perception of robot appearance and service context on usage intention. Ann. Tour. Res. 2022, 92, 103324. [Google Scholar] [CrossRef]
- Alam, S.; Abdullah, S.; Kokash, H.; Ahmed, S.; Omar, N. Consumer acceptance of retail service robots: Mediating role of pleasure and arousal. J. Decis. Syst. 2024, 33, 1–27. [Google Scholar] [CrossRef]
- Lin, B.; Lee, W.; Yang, R.; Lim, E. Examining the effects of values and risks on outdoor food-delivery robot adoption using mixed methods: Different stakeholders’ perspectives. Inf. Technol. Tour. 2025, 27, 157–188. [Google Scholar] [CrossRef]
- Lin, G.-Y.; Jhang, C.-C.; Wang, Y.-S. Factors affecting parental intention to use AI-based social robots for children’s ESL learning. Educ. Inf. Technol. 2024, 29, 6059–6086. [Google Scholar] [CrossRef]
- Cavusoglu, M.; Collins, G.R.; DeMicco, F.; Cobanoglu, C. Robot acceptance and service quality in food delivery: An expanded TAM-based study. Int. J. Hum.–Comput. Interact. 2025, 41, 1–16. [Google Scholar] [CrossRef]
- So, K.K.F.; Kim, H.; Liu, S.Q.; Fang, X.; Wirtz, J. Service robots: The dynamic effects of anthropomorphism and functional perceptions on consumers’ responses. Eur. J. Mark. 2024, 58, 1–32. [Google Scholar] [CrossRef]
- Li, Q.; Jiang, S. Perceptual service-robot attributes affecting customer value co-creation intention in luxury-hotel industry. Innov. Mark. 2025, 21, 89–104. [Google Scholar] [CrossRef]
- Moliner-Tena, M.Á.; Callarisa-Fiol, L.J.; Sánchez-García, J.; Rodríguez-Artola, R.M. Service robots and memorable customer experience: The influence of perceived anthropomorphism. Futur. Bus. J. 2025, 11, 75. [Google Scholar] [CrossRef]
- Gong, T. The dark side of robot anthropomorphism: Cognitive load, stress, and dysfunctional customer behavior. Serv. Ind. J. 2025, 45, 1–29. [Google Scholar] [CrossRef]
- Reimann, M.M.; Hindriks, K.V.; Kunneman, F.A.; Oertel, C.; Skantze, G.; Leite, I. What can you say to a robot? Capability communication leads to more natural conversations. arXiv 2025, arXiv:2502.01448. [Google Scholar]
- Al-Oraini, B.S. Chatbot dynamics: Trust, social presence and customer satisfaction in AI-driven services. J. Inf. Digit. Technol. 2025, 9, 1–18. [Google Scholar] [CrossRef]
- Nagamachi, M. Kansei engineering as an ergonomic consumer-oriented technology for product development. Int. J. Ind. Ergon. 1995, 15, 3–11. [Google Scholar] [CrossRef]
- Coronado, E.; Venture, G.; Yamanobe, N. Applying Kansei/affective-engineering methodologies in the design of social and service robots: A systematic review. Int. J. Soc. Robot. 2021, 13, 1161–1171. [Google Scholar] [CrossRef]
- Yim, A.; Cui, A.P.; Walsh, M. The role of cuteness on consumer attachment to artificial-intelligence agents. J. Res. Interact. Mark. 2024, 18, 127–141. [Google Scholar] [CrossRef]
- Huo, J.; Gong, L.; Xi, Y.; Chen, Y.; Chen, D.; Yang, Q. Mind the voice! The effect of service-robot voice vividness on service-failure tolerance. J. Travel Tour. Mark. 2025, 42, 1–19. [Google Scholar] [CrossRef]
- Guerreiro, J.; Loureiro, S.M.C. I am attracted to my cool smart assistant! Analysing attachment–aversion in AI–human relationships. J. Bus. Res. 2023, 161, 113863. [Google Scholar] [CrossRef]
- Podsakoff, P.M.; MacKenzie, S.B.; Lee, J.-Y.; Podsakoff, N.P. Common method biases in behavioral research: A critical review of the literature and recommended remedies. J. Appl. Psychol. 2003, 88, 879–903. [Google Scholar] [CrossRef] [PubMed]
- Ali, F.; Sesliokuyucu, O.S.; Khan, K.A.; Alotaibi, S.; Wu, C. The impact of robotic gastronomic experiences on customer value, delight and loyalty in service-robot restaurants. Int. J. Hum.-Comput. Interact. 2024, 40, 1–13. [Google Scholar] [CrossRef]
- van Pinxteren, M.M.E.; Wetzels, R.W.H.; Rüger, J.; Pluymaekers, M.; Wetzels, M. Trust in humanoid robots: Implications for services marketing. J. Serv. Mark. 2019, 33, 507–518. [Google Scholar] [CrossRef]
- Yoganathan, V.; Osburg, V.-S.; Kunz, W.H.; Toporowski, W. Check-in at the robo-desk: Effects of automated social presence on social cognition and service implications. Tour. Manag. 2021, 85, 104309. [Google Scholar] [CrossRef]
- Sharma, V.; Kapse, M.; Poulose, J.; Mahajan, Y. Robotic dining delight: Unravelling the key factors driving customer satisfaction in service-robot restaurants using PLS-SEM and ML. Cogent Bus. Manag. 2023, 10, 2281053. [Google Scholar] [CrossRef]
- Terrah, A.; Ali, F.; Abbasi, G.A.; Doğan, S.; Cobanoglu, C. Determinants of users’ intentions to use AI-enabled technological innovations in hotels: A hybrid approach using PLS-SEM and fsQCA. Adv. Hosp. Tour. Res. 2024, 12, 200–228. [Google Scholar] [CrossRef]
- Jaganathan, M.; Perumal, S.; Shaari, H.; Sulaiman, Y.; Mat, N.K.N. Consumer attitude as a mediator in the adoption of smart-retail technologies in emerging markets. Multidiscip. Rev. 2024, 8, 2025101. [Google Scholar] [CrossRef]
- De Cicco, R.; Silva, S.C.; Alparone, F.R. Millennials’ attitude toward chatbots: An experimental study in a social-relationship perspective. Int. J. Retail Distrib. Manag. 2020, 48, 1213–1233. [Google Scholar] [CrossRef]
- Čaić, M.; Avelino, J.; Mahr, D.; Odekerken-Schröder, G.; Bernardino, A. Robotic versus human coaches for active aging: An automated-social-presence perspective. Int. J. Soc. Robot. 2020, 12, 867–882. [Google Scholar] [CrossRef]
- Zhou, T.; Wu, X. Examining generative-AI user disclosure intention: A perceived-affordance perspective. J. Theor. Appl. Electron. Commer. Res. 2025, 20, 99. [Google Scholar] [CrossRef]
- Tai, Y.-H.; Nwachukwu, P.T.T.; LePage, B.A.; Fang, W.-T. Examining customer intentions to purchase intelligent-robotic products and services in Taiwan using the theory of planned behaviour. BMC Psychol. 2024, 12, 351. [Google Scholar] [CrossRef]
- Chi, R.; Zhang, J.; Pan, M. The effect of anthropomorphic competence-warmth congruence of service robots on recommendation intention. Curr. Psychol. 2024, 43, 6570–6583. [Google Scholar] [CrossRef]
- Kumar, S.; Poudyal, A.; Choudhury, S.; Jha, A. Analysing customer preferences for AI-enabled service-robot physical appearance in the tourism and hospitality industry: Insights and exploration. Tour. Plann. Dev. 2025, 22, 1–18. [Google Scholar]
- Yang, Y.; Cho, H.-K.; Kim, M.-Y. Factors affecting the continuance-usage intention of social robots with episodic memory: A stimulus–organism–response perspective. Appl. Sci. 2025, 15, 5334. [Google Scholar] [CrossRef]
- Wong, A.; Wong, J. Service-robot acceptance in museums: An empirical study using the service-robot acceptance model (sRAM). J. Serv. Manag. 2024, 38, 619–635. [Google Scholar] [CrossRef]
- Stockton, R.; Kerlinger, F.N. Foundations of behavioral research. Am. Educ. Res. J. 1974, 11, 292. [Google Scholar] [CrossRef]
- Huang, T.; Wang, G.; Huang, C. What promotes the mobile-payment behavior of the elderly? Humanit. Soc. Sci. Commun. 2024, 11, 163. [Google Scholar]
- Fornell, C.; Larcker, D.F. Evaluating structural equation models with unobservable variables and measurement error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Hair, J.F.; Risher, J.J.; Sarstedt, M.; Ringle, C.M. When to use and how to report the results of PLS-SEM. Eur. Bus. Rev. 2019, 31, 2–24. [Google Scholar]
- Kaiser, H.F. The application of electronic computers to factor analysis. Educ. Psychol. Meas. 1960, 20, 141–151. [Google Scholar] [CrossRef]
- Fang, S.; Han, X.; Chen, S. Hotel guest-robot interaction experience: A scale development and validation. J. Hosp. Tour. Manag. 2024, 58, 1–10. [Google Scholar] [CrossRef]
- Abou Allaban, A.; Wang, M.; Padır, T. A systematic review of robotics research in support of in-home care for older adults. Information 2020, 11, 75. [Google Scholar] [CrossRef]
- Stone, M. Cross-validatory choice and assessment of statistical predictions. J. R. Stat. Soc. Ser. B 1974, 36, 111–133. [Google Scholar] [CrossRef]
- Lampropoulos, G. Social robots in education: Current trends and future perspectives. Information 2025, 16, 29. [Google Scholar] [CrossRef]
- Santiago, J.; Borges-Tiago, M.T.; Tiago, F. Embracing RAISA in restaurants: Exploring customer attitudes toward robot adoption. Technol. Forecast. Soc. Change 2024, 199, 123047. [Google Scholar] [CrossRef]
- Wold, H. The partial least squares approach to structural equation modeling. In Handbook of Multivariate Experimental Psychology, 2nd ed.; Nesselroade, J.R., Cattell, R.B., Eds.; Plenum: New York, NY, USA, 1986; pp. 587–634. [Google Scholar]
- Geisser, S. A predictive approach to the random-effect model. Biometrika 1974, 61, 101–107. [Google Scholar] [CrossRef]
- Osakwe, C.N.; Říha, D.; Elgammal, I.M.Y.; Ramayah, T. Understanding Gen Z shoppers’ interaction with customer-service robots: A cognitive-affective-normative perspective. Int. J. Retail Distrib. Manag. 2024, 52, 103–120. [Google Scholar] [CrossRef]
- Lei, C.; Hossain, M.S.; Wong, E. Determinants of repurchase intentions of hospitality services delivered by artificially intelligent service robots. Sustainability 2023, 15, 4914. [Google Scholar] [CrossRef]
- Lei, X.; Liu, F. How service robots facilitate user self-disclosure: The roles of personality, animacy, and automated social presence. Int. J. Hum.-Comput. Interact. 2025, 41, 2135–2148. [Google Scholar] [CrossRef]
- Li, J.; Hudson, S.; So, K.K.F. Hedonic consumption pathway vs. acquisition-transaction utility pathway: An empirical comparison of Airbnb and hotels. Int. J. Hosp. Manag. 2021, 94, 102844. [Google Scholar] [CrossRef]
- Wu, M.; Tse, W.T.S.; Tung, V.W.S. Enhancing intellectual experiences for users: A multidimensional model of humanoid service robots in hospitality and tourism. Int. J. Contemp. Hosp. Manag. 2025, 37, 1–25. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, X.; Jia, F.; Yang, J.; Bai, X.; Yu, R. Exploring the impact of social-robot design characteristics on users’ privacy concerns: Evidence from PLS-SEM and FsQCA. Int. J. Hum.-Comput. Interact. 2024, 40, 1–22. [Google Scholar] [CrossRef]
- Choi, S.; Mattila, A.S.; Bolton, L.E. To err is human(-oid): How do consumers react to robot service failure and recovery? J. Serv. Res. 2021, 24, 354–371. [Google Scholar] [CrossRef]


| Construct | Item | Description | Source |
|---|---|---|---|
| Utility | UT1 | The functions provided by SRs in the shopping malls and hotels are very useful to me. | Huang et al. [28] |
| UT2 | SRs can efficiently complete their tasks, which increases my satisfaction. | ||
| UT3 | SRs have rich functions that can meet my various needs in shopping malls and hotels. | ||
| Autonomy | AT1 | I am impressed by the autonomy shown by SRs when performing tasks. | Huang et al. [28] Jörling et al. [6] |
| AT2 | SRs can independently complete tasks without human intervention. | ||
| AT3 | The autonomous decision-making ability of SRs enhances my trust in them. | ||
| Personification | PSN1 | The appearance design of SRs makes me feel they are more like humans. | Chi et al. [57] |
| PSN2 | The behaviors and reactions of SRs make me feel they have humanized qualities. | ||
| PSN3 | The humanized characteristics of SRs increase my willingness to interact with them. | ||
| Communication Style | CS1 | The communication method of SRs makes me feel they are friendly and approachable. | Janson et al. [7] |
| CS2 | The language expression of SRs is clear and easy to understand. | ||
| CS3 | The communication style of SRs makes me feel comfortable and willing to communicate with them. | ||
| Cuteness | CT1 | The appearance design of SRs makes me think they are cute. | Maeiro et al. [9] |
| CT2 | The behaviors and sounds of SRs make me feel they have cute qualities. | ||
| CT3 | The cuteness of SRs makes me more willing to interact with them. | ||
| Coolness | CL1 | The high-tech features of SRs make me think they are cool. | Wu et al. [15] |
| CL2 | The unique functions and design of SRs make me think they are attractive. | ||
| CL3 | The coolness of SRs has generated my interest in them. | ||
| Warmth | WT1 | The interaction method of SRs makes me feel they are friendly. | Belanche et al. [18] |
| WT2 | The good personality of SRs makes me willing to communicate with them. | ||
| WT3 | The harmless characteristics of SRs make me feel at ease. | ||
| Novelty | NO1 | The novel functions of SRs make me think they are interesting. | Sharma et al. [50] |
| NO2 | The unique design of SRs makes me feel they are different from others. | ||
| NO3 | The novelty of SRs makes me willing to try interacting with them. | ||
| Social presence | SP1 | The presence of SRs enhances my social experience in shopping malls and hotels. | De Cicco et al. [53] |
| SP2 | Interaction with SRs makes me feel a presence in social activity occasions, just like other customers. | ||
| SP3 | The social presence of SRs makes me more willing to accept their services. | ||
| Intention to use | INT1 | You are willing to use SRs again in the future. | Wong et al. [60] |
| INT2 | You would recommend others to use the SRs. | ||
| INT3 | You think the presence of SRs has influenced your willingness to use it again. |
| H | Cause | Effect | β (Male) | β (Female) | Original Difference | Difference |
|---|---|---|---|---|---|---|
| Δβ (M-F) | ||||||
| H1a | Utility | Cute | 0.168 | 0.291 | −0.122 *** | 0.443 |
| H1b | Utility | Novelty | 0.176 | 0.213 | −0.037 *** | 0.813 |
| H1c | Utility | Warmth | 0.103 | 0.16 | −0.057 *** | 0.749 |
| H1d | Utility | Coolness | 0.164 | 0.121 | 0.043 * | 0.832 |
| H2a | Autonomy | Cute | 0.064 | 0.294 | −0.23 *** | 0.097 |
| H2b | Autonomy | Novelty | 0.128 | 0.147 | −0.018 *** | 0.912 |
| H2c | Autonomy | Warmth | 0.25 | 0.414 | −0.164 *** | 0.223 |
| H2d | Autonomy | Coolness | 0.138 | 0.431 | −0.293 *** | 0.055 |
| H3a | Personification | Cute | 0.171 | 0.291 | −0.119 *** | 0.447 |
| H3b | Personification | Novelty | 0.178 | 0.14 | 0.039 * | 0.839 |
| H3c | Personification | Warmth | 0.073 | 0.19 | −0.118 *** | 0.45 |
| H3d | Personification | Coolness | 0.109 | 0.081 | 0.028 * | 0.876 |
| H4a | Communication | Cute | 0.485 | 0.013* | 0.472 | 0.001 *** |
| H4b | Communication | Novelty | 0.346 | 0.213 | 0.133 | 0.403 |
| H4c | Communication | Warmth | 0.412 | 0.073 | 0.339 | 0.04 ** |
| H4d | Communication | Coolness | 0.376 | 0.087 | 0.289 | 0.106 |
| H5a | Cute | Intention to use | 0.254 | 0.368 | −0.115 *** | 0.544 |
| H5b | Cute | Social presence | 0.002 ** | 0.149 | −0.147 *** | 0.458 |
| H6a | Coolness | Intention to use | 0.087 | 0.399 | −0.311 *** | 0.038 * |
| H6b | Coolness | Social presence | 0.052 | −0.098 *** | 0.15 | 0.365 |
| H7a | Warmth | Intention to use | 0.137 | −0.275 *** | 0.413 | 0.018 * |
| H7b | Warmth | Social presence | 0.193 | 0.298 | −0.105 *** | 0.588 |
| H8a | Novelty | Intention to use | 0.187 | 0.144 | 0.043 * | 0.799 |
| H8b | Novelty | Social presence | 0.366 | 0.14 | 0.227 | 0.196 |
| H9a | Social presence | Intention to use | 0.144 | 0.099 | 0.045 * | 0.705 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, G.; Wu, X.; Huang, Z.; Zhang, B. Investigating Service Robot Acceptance Factors: The Role of Emotional Design, Communication Style, and Gender Groups. Information 2025, 16, 463. https://doi.org/10.3390/info16060463
Ren G, Wu X, Huang Z, Zhang B. Investigating Service Robot Acceptance Factors: The Role of Emotional Design, Communication Style, and Gender Groups. Information. 2025; 16(6):463. https://doi.org/10.3390/info16060463
Chicago/Turabian StyleRen, Gang, Xuezhen Wu, Zhihuang Huang, and Baoyi Zhang. 2025. "Investigating Service Robot Acceptance Factors: The Role of Emotional Design, Communication Style, and Gender Groups" Information 16, no. 6: 463. https://doi.org/10.3390/info16060463
APA StyleRen, G., Wu, X., Huang, Z., & Zhang, B. (2025). Investigating Service Robot Acceptance Factors: The Role of Emotional Design, Communication Style, and Gender Groups. Information, 16(6), 463. https://doi.org/10.3390/info16060463