1. Introduction
The initial alignment is one of the key procedures in strapdown inertial navigation systems (SINS), and the accuracy of this alignment directly influences the overall performance and reliability of the system [
1]. In the practical applications of autonomous underwater vehicles (AUVs), the initial alignment of SINS is typically required to be performed on a moving base, which places higher demands on alignment algorithms [
2]. As the technological demands for SINS continue to rise, traditional alignment methods based on small misalignment angle error models and linear Kalman filtering approaches are gradually revealing limitations, particularly in complex environments. In adverse sea conditions, intense oceanic movements and environmental disturbances can result in a significant degradation in the heading accuracy of coarse SINS alignment, which further impacts the system’s navigational reliability and stability. As a result, how to achieve the high-precision initial alignment of SINS under large misalignment angles has become an urgent issue. In this context, the error dynamics of SINSs exhibit significant nonlinearity, making traditional linear filtering methods inadequate. Applying nonlinear filtering techniques is therefore crucial to improving the alignment accuracy and convergence speed of these systems.
In the context of pose estimation, rigid body rotation is one of the primary sources of nonlinearity in SINS. The main methods for representing rotational motion include Euler angles [
3], rotation matrices, quaternions [
4], and Lie algebras [
5], each of which has its advantages and disadvantages. For instance, the Euler angle method is intuitive and easy to grasp, but it encounters the issue of gimbal lock when used in navigation calculations [
6]. The rotation matrix method describes rotation using a 3 × 3 matrix but suffers from over-parameterization. The quaternion method is widely used for its excellent numerical stability, but it also suffers from over-parameterization and requires normalization at each filtering update to ensure that the quaternion remains unitary [
7]. Using Lie algebra to represent poses in filtering methods resolves the over-parameterization issue and provides advantages in both algorithm convergence and pose estimation accuracy.
Currently, the commonly used nonlinear filtering methods include extended Kalman filtering (EKF), unscented Kalman filtering (UKF), cubature Kalman filtering (CKF), and particle filtering (PF) [
8,
9,
10,
11]. Particle filtering (PF) is widely used in applications such as target tracking and navigation [
12], as it can handle state estimation problems in any nonlinear and non-Gaussian system, and has been extensively applied in these areas [
13]. However, particle filtering faces two main challenges in practical applications: first, the challenge of selecting an appropriate importance density function, and second, the risk of particle degeneracy. Due to its superior numerical stability and filtering accuracy in high-dimensional systems, the importance density function for particle filtering can be generated by CKF instead [
14]. However, during the initial alignment of a SINS on a dynamic base, state estimation is easily affected by gross measurement errors and state anomalies or outliers, which can result in significant degradation of the filtering accuracy and slower convergence when using traditional CPF algorithms.
To address the aforementioned issues, this paper proposes an adaptive mixed-order spherical simplex-radial cubature particle filter (MLG-AMSSRCPF) algorithm based on matrix Lie group representation. The algorithm innovatively uses the matrix Lie group SO(3) to represent attitude errors in manifold space, combining it with mixed-order spherical simplex-radial cubature Kalman filtering. It incorporates dynamic noise covariance adjustment, adaptive particle number, and particle weight update strategies, demonstrating a significantly improved filtering accuracy and computational efficiency. The system state variables consist of attitude errors represented by the Lie group matrix SO(3), velocity errors in Euclidean space, gyroscope drift errors, and accelerometer bias errors, which are accurately estimated within the framework of mixed-order cubature Kalman filtering. This algorithm establishes a mapping between Euclidean space and Lie group manifolds, allowing the volume points, state means, and variances of attitude errors to be computed in the tangent space of the manifold, while the velocity and other error variables are kept in Euclidean space. This approach avoids the complex Jacobian matrix solving process used in traditional extended Kalman filtering (EKF) and mitigates the potential issue of covariance non-positive definiteness that is found in unscented Kalman filtering (UKF).
Additionally, the algorithm introduces an adaptive noise covariance update mechanism which allows for the real-time dynamic adjustment of the noise covariance matrix based on the system’s noise characteristics, thereby significantly enhancing its adaptability to nonlinear systems in complex noise environments. Building upon this, the algorithm uses Euclidean distance to measure the similarity between particles, enabling adaptive adjustment of the particle number. This approach effectively alleviates the particle degeneracy problem while reasonably controlling the computational complexity [
15]. Moreover, a multidimensional Huber loss function is introduced for the adaptive optimization of particle weights, effectively suppressing the influence of outliers on the weight distribution, which significantly improves the stability and robustness of the filter under complex noise conditions. In the initial alignment process of a SINS on a dynamic platform, the use of the MLG-AMSSRCPF algorithm can notably improve the alignment accuracy under large misalignment angle conditions, especially gross measurement errors and sudden changes in system noise are involved, demonstrating exceptional robustness and a rapid convergence capability. Beyond initial alignment tasks, the proposed algorithm also holds substantial potential for broader applications in attitude estimation and the navigation of vehicles such as autonomous cars and unmanned aerial vehicles (UAVs), where high precision and robustness are essential due to the system operating in real-world dynamic conditions.
Main Contributions
- (1)
Adaptive filtering framework based on matrix Lie group representation: An adaptive mixed-order spherical simplex-radial cubature particle filter (MLG-AMSSRCPF) algorithm based on matrix Lie group representation is proposed. This method uses the Lie group SO(3) to represent attitude errors and achieves high-precision conversion between manifold space and Euclidean space through exponential and logarithmic mapping. This approach avoids the complexity of the Jacobian matrix computations that are used in measuring rotational motion, while effectively reducing linearization errors, which significantly enhances its filtering accuracy, stability, and robustness.
- (2)
Innovative mixed-order sampling and dynamic noise covariance update mechanism: The MLG-AMSSRCPF algorithm integrates the mixed-order spherical simplex-radial cubature Kalman filtering (MSSRCKF) method, which combines third-order spherical integration with fifth-order radial integration. This approach significantly improves the accuracy of state mean and covariance propagation while retaining an optimal computational efficiency. Furthermore, a dynamic noise covariance update mechanism based on innovation sequences is proposed. By dynamically adjusting the process noise and measurement noise covariance matrices in real-time, this mechanism further enhances the filter’s adaptability in complex noise environments, while also improving the system’s stability and interference resistance.
- (3)
Particle filter importance density function design and adaptive optimization strategy: The importance density function is optimized based on the MLG-AMSSRCKF algorithm to enhance the particle distribution’s ability to capture non-Gaussian characteristics and higher-order statistical information. Through a dynamic particle number adjustment mechanism based on Euclidean distance, redundant computations are effectively reduced. Additionally, by employing a multidimensional Huber loss function for the adaptive optimization of particle weights, the influence of outliers on the weight distribution is effectively suppressed. This optimization strategy not only successfully alleviates the particle degeneracy problem but also significantly improves the filtering accuracy, robustness, and computational efficiency of SINS in complex nonlinear environments.
- (4)
Comprehensiveness of simulation and experimental validation: The effectiveness and applicability of the MLG-AMSSRCPF algorithm are comprehensively validated through typical simulation scenarios (including cases with no measurement anomalies, cases with gross measurement errors, and cases with sudden system noise changes) and real-world offshore dynamic base initial alignment experiments. Both the simulation and experimental results demonstrate that the algorithm significantly outperforms the traditional cubature particle filter (CPF) in terms of filtering accuracy, convergence speed, and computational efficiency. Specifically, the filtering accuracy is improved by approximately 9–62% compared to the CPF algorithm, which showcases the exceptional noise resistance, dynamic adaptability, and robustness of the proposed method. This provides a reliable and effective solution for high-precision initial alignment in complex dynamic environments.
This paper is structured as follows:
Section 1: Introduction: This section introduces the background of the initial alignment of strapdown inertial navigation systems (SINS) under large misalignment angle conditions and the main challenges that are faced in complex dynamic environments. It analyzes the limitations of existing filtering techniques (such as EKF, UKF, CKF, and PF) under nonlinear and high-noise conditions, particularly issues like particle degeneracy, difficulties in selecting the importance density function, and insufficient computational efficiency. In light of these challenges, this paper outlines the research objectives and significance.
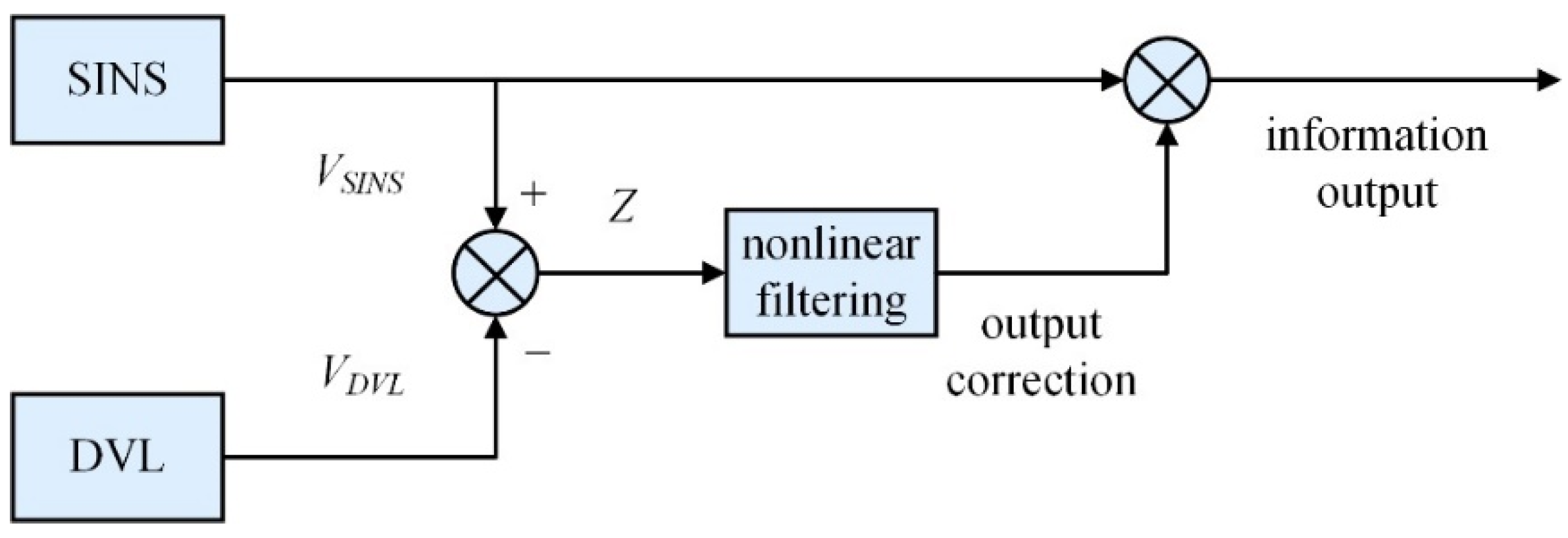
Section 2: Initial alignment of SINS on a dynamic platform: This section describes the error model and state estimation principles used for SINS during their initial alignment on a dynamic platform, with a particular focus on analyzing the nonlinear characteristics of attitude errors under large misalignment angle conditions. By combining velocity information from the Doppler velocity logger (DVL) and the navigation state variables of SINS, the theoretical derivation of the nonlinear error model reveals the core mechanism of error propagation. This lays the theoretical foundation for the subsequent design of the adaptive filtering algorithm based on matrix Lie groups.
Section 3: Optimization design of the AMSSRCKF filtering algorithm based on matrix Lie group representation: This section proposes an adaptive mixed-order spherical simplex-radial cubature Kalman filtering algorithm based on matrix Lie group representation. By mapping attitude errors onto the Lie group manifold space and incorporating exponential and logarithmic mappings, the algorithm avoids linearization errors in rotational motion. The algorithm optimizes the propagation accuracy of state means and covariances using a mixed-order sampling method. Additionally, it dynamically adjusts the noise covariance matrix through innovation sequences, thereby achieving an enhanced filtering accuracy, robustness, and computational efficiency.
Section 4: Particle filter importance density function design and adaptive optimization strategy: This section presents an importance density function design method, based on the MLG-AMSSRCKF algorithm, which significantly enhances the particle distribution’s ability to adapt to non-Gaussian characteristics and higher-order statistical information. A dynamic particle number adjustment mechanism based on Euclidean distance is introduced to effectively reduce redundant particles and optimize the computational efficiency of the algorithm. Additionally, a multidimensional Huber loss function is employed to adaptively optimize particle weights, suppressing the interference of outliers and alleviating the severity of the particle degeneracy problem.
Section 5: Performance analysis: This section provides a comprehensive analysis of the theoretical performance of the MLG-AMSSRCPF algorithm from several aspects, including its sampling strategy, filtering accuracy, computational complexity, adaptability to dynamic environments, and noise resistance. By comparing it with traditional CPF and other improved algorithms, the performance advantages of the MLG-AMSSRCPF algorithm are thoroughly evaluated under conditions of gross measurement error interference, system noise jumps, and strong nonlinearity.
Section 6: Simulation analysis: This section validates the effectiveness of the MLG-AMSSRCPF algorithm through typical simulation scenarios, including cases with no anomalies in measurements or noise, gross measurement error interference, and system noise jumps. The simulation results demonstrate that the algorithm significantly outperforms the traditional cubature particle filter in terms of filtering accuracy, convergence speed, and computational efficiency, exhibiting particularly exceptional performance when dealing with noise jumps and gross measurement error interference.
Section 7: Experimental validation: This section validates the engineering applicability of the MLG-AMSSRCPF algorithm through real-world offshore dynamic platform alignment experiments. The experimental results demonstrate that the algorithm exhibits good adaptability to gross measurement errors and changes in system noise characteristics during initial dynamic platform alignment. Compared to the traditional cubature particle filter algorithm, the heading misalignment angle estimation accuracy of the proposed algorithm is improved by 28.8%, showcasing higher robustness and rapid convergence performance.
Section 8: Conclusions: This section summarizes the main contributions of the MLG-AMSSRCPF algorithm, highlighting its improved high-precision filtering capability, dynamic adaptability, and computational efficiency under complex conditions such as gross measurement error interference and system noise jumps. Combined with simulation and experimental validation, the applicability of the algorithm in complex dynamic environments is analyzed. Finally, this section outlines future research directions, including the optimization of the algorithm’s real-time performance and its potential applications in multi-sensor fusion.
4. Design of Importance Density Function and Adaptive Optimization Strategy for Particle Filtering
The performance of particle filtering methods largely depends on the choice of the importance density function. A well-designed importance density function can not only effectively mitigate particle degeneracy but also significantly improve both the accuracy and computational efficiency of the filtering process. To address this critical issue, this paper proposes an adaptive mixed-order spherical simplex-radial volume particle filtering algorithm based on matrix Lie group representation (MLG-AMSSRCPF), aiming to achieve efficient and precise state estimation in complex environments.
This algorithm combines mixed-order spherical simplex-radial volume Cubature Kalman filtering (MSSRCKF) with matrix Lie group representation, and integrates an adaptive noise covariance update mechanism [
25]. By optimizing the mean and variance of the state, a more accurate importance density function for particle filtering is designed, ensuring that the generated particle set can more effectively handle complex state variations and thus improving the filter’s performance.
Furthermore, the MLG-AMSSRCPF algorithm uses Euclidean distance to measure the similarity between particles and dynamically adjusts the number of particles to reduce the computational complexity while maintaining accuracy. At the same time, an adaptive multidimensional Huber loss function is employed to adjust particle weights, suppressing the influence of outliers on the filtering results and thereby significantly enhancing the robustness of the algorithm [
26].
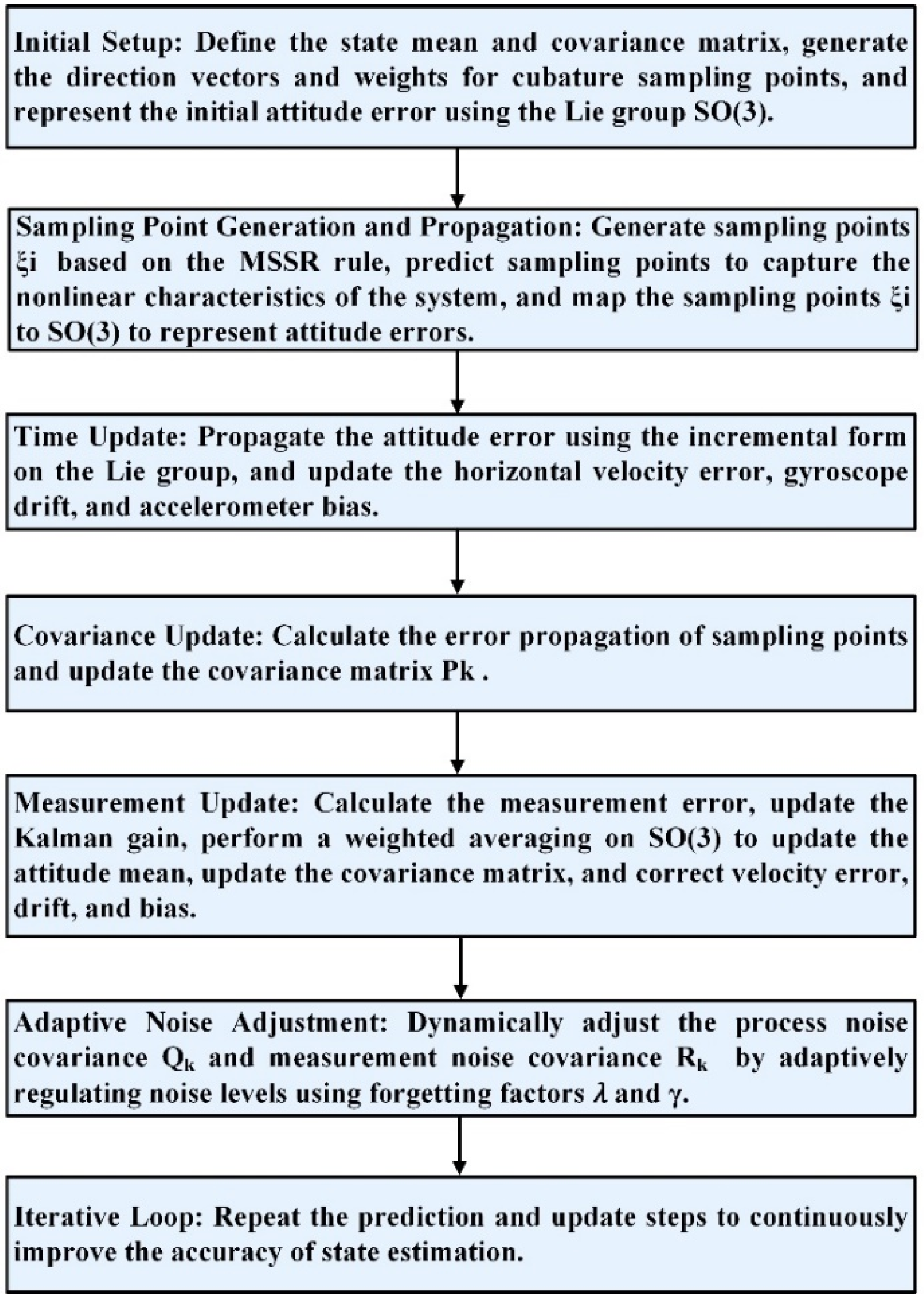
The comprehensive application of these optimization strategies strengthens the filter’s performance in dynamic noise environments, ensuring its efficiency and reliability in high-dimensional and real-time applications. The workflow of the MLG-AMSSRCPF algorithm is shown in
Figure 3.
The specific workflow of the MLG-AMSSRCPF algorithm is as follows:
- (1)
Initialization
Particle state initialization:
where N is the initial number of particles,
is the initial state of the i-th particle, and
is the initial weight.
Mean and covariance matrix initialization:
where
is the expected value of the initial state and
is the initial covariance matrix.
Parameter settings: set , where is the Euclidean distance threshold used to assess the similarity between particles; is the cost function threshold used to control particle number adjustments; is the parameter of the Huber loss function, which is used to control the filter’s sensitivity to large residuals; and and are the upper and lower limits of the particle numbers, and ensure the efficiency and accuracy of the algorithm.
- (2)
State Prediction
Particle prediction: predict the particles using the system state transition equation, in which the particles generate the next state based on the current state and the importance density function:
where
is the importance density function optimized by the MLG-AMSSRCKF algorithm.
Importance density function design:
The importance density function is designed using the MLG-AMSSRCKF:
Generate particles based on the new distribution:
- (3)
Particle Elimination and Selection
To avoid particle degradation caused by particles being too similar, an elimination strategy based on Euclidean distance is used to reduce the number of particles while retaining representative ones.
Euclidean distance judgment:
Use the Euclidean distance
between neighboring particles to judge similar particles:
where γ is the preset Euclidean distance threshold that is used to measure the similarity between two particles in state space. After sorting, Euclidean distances are computed only between adjacent particles, resulting in a computational complexity of O(N⋅ d). Given that the number of particles (≤200) and the state dimension (≤15) are both constrained, the overall computational cost remains manageable. This evaluation is performed only once during the sampling stage, exerting minimal impact on real-time performance.
Particle selection:
If , select based on the particle weights;
If , retain the i-th particle ;
Otherwise, retain the i+1-th particle ;
If the condition is not met, retain both particles.
Update particle set:
The retained particles form the set , while the eliminated particles form the set .
- (4)
Adaptive Particle Number Adjustment
Through the previous steps, the elimination of particles was achieved to reduce the computational cost. However, excessive reduction in the number of particles may lead to a loss of particle diversity, which could cause filter divergence. Therefore, a cost function can be introduced to dynamically adjust the number of particles by calculating the innovation error cost function . Specifically, a threshold is predefined, and by comparing the current cost function value with the threshold, it is determined whether to decrease or increase the number of particles.
Innovation error cost function:
where
is the observation,
is the observation noise covariance matrix,
is the state estimate obtained using the particles retained in the set
and their corresponding weights, and
is the number of particles.
Particle number adjustment strategy:
If
, it indicates that the number of particles is sufficient, and the particle number can be reduced:
If
, it indicates that more particles are needed to maintain filtering accuracy:
This process ensures the dynamic adjustment of the number of particles, avoiding the computational burden of an excessive number of particles while maintaining filtering accuracy.
- (5)
Weight Calculation and Adjustment
To enhance the robustness of the algorithm against outlier observations, a multidimensional Huber loss function is introduced for adaptive weight adjustment.
Observation residual calculation: Multidimensional Huber loss function for weight adjustment:
To handle multidimensional observation residuals, the multidimensional Huber loss function is introduced for weight adjustment:
where
represents the multidimensional norm of the observation residual, which is calculated using the Mahalanobis distance:
Here, R denotes the covariance matrix of the observation noise, which characterizes the variability of noise across different observation dimensions. Incorporating this weighting matrix into the Mahalanobis distance enhances the ability to distinguish abnormal observations. The parameter is a tuning factor in the Huber loss function, used to control the sensitivity to large observation residuals, thereby enabling the filter to smooth small errors while suppressing the influence of outliers on the estimation results.
Updated particle weights: - (6)
Particle Weight Normalization:
- (7)
Resampling:
Resample based on the normalized particle weights:
- (8)
State Estimation and Covariance Calculation:
- (9)
Iteration:
Set , and repeat steps 2 through 8 until the filtering process is complete.
In the MLG-AMSSRCPF algorithm, the use of Euclidean distance and the design of the multidimensional Huber loss function are based on their unique advantages in high-dimensional nonlinear filtering.
Firstly, Euclidean distance is known for its simplicity and intuitiveness in calculation. By quickly computing the state-space distances between particles, it can effectively identify particle similarities and prevent particle degeneracy, especially in high-dimensional state estimation. In the MLG-AMSSRCPF algorithm, the particle count is set between 100 and 200, with a dynamic adjustment mechanism being used to balance the filtering accuracy and computational complexity. References [
27,
28] indicate that, for high-dimensional nonlinear problems in tightly coupled SINS/GPS navigation, setting the particle count to 100–200 effectively reduces the computational burden while maintaining sufficient filtering accuracy and particle diversity. By setting a Euclidean distance threshold of γ = 0.5, the algorithm can effectively identify and avoid high similarities between particles, preventing particle degeneracy. References [
29,
30] have conducted in-depth studies demonstrating the effectiveness of this strategy in solving multidimensional nonlinear navigation problems. Furthermore, the MLG-AMSSRCPF algorithm introduces a cost function threshold of α = 0.3 for adaptively adjusting the number of particles. According to Reference [
31], this value effectively reduces the number of redundant particles while maintaining filtering accuracy, thereby improving the computational efficiency.
Secondly, the multidimensional Huber loss function demonstrates strong robustness in handling outlier observations. It combines the advantages of the mean squared error (MSE) and mean absolute error (MAE), maintaining precision when dealing with small residuals while acting like a MAE for large residuals, and thus mitigating the impact of outliers on the filtering results. To further enhance the algorithm’s robustness against outlier observations, the MLG-AMSSRCPF algorithm employs the multidimensional Huber loss function for weight adjustment, with the loss function parameter δ set to 1.5. References [
32,
33] highlight the effectiveness of this parameter setting in reducing the impact of large residuals on the filtering accuracy. The multidimensional Huber loss function calculates the norm of the multidimensional observation residuals, which allows the filter to maintain high sensitivity to normal observations while significantly reducing the influence of outliers on particle weights. Specifically, Mahalanobis distance is used as the measure of the norm for the multidimensional residuals, making weight adjustment more accurate and effective, and thereby further enhancing the scientific and rational basis for the weight adjustments.
In summary, the MLG-AMSSRCPF algorithm effectively addresses the challenges of importance density function selection and particle degeneracy by incorporating matrix Lie group representation optimization strategies, dynamic noise covariance matrix adjustments, adaptive particle number adjustment mechanisms, and weight optimization based on the multidimensional Huber loss function. This algorithm not only optimizes the design of the importance density function but also significantly enhances the filter’s robustness and adaptability in complex nonlinear, non-Gaussian environments through dynamic particle number and weight adjustments. These improvements substantially increase the state estimation accuracy and computational efficiency of SINS in large initial misalignment angle scenarios, making the algorithm particularly suitable for high-precision, real-time initial alignment applications.
5. Performance Analysis
The MLG-AMSSRCPF algorithm exhibits an enhanced filter performance in complex navigation environments through the integration of matrix Lie group representation strategies, mixed-order sampling methods, an adaptive noise covariance update mechanism, and adaptive particle number and weight adjustment strategies. Compared with traditional cubature particle filter (CPF) algorithms, the MLG-AMSSRCPF algorithm maintains relatively low computational complexity while significantly improving the capability to handle nonlinear and non-Gaussian systems.
First, the algorithm employs the MSSR cubature sampling rule, which combines third-order spherical integration with fifth-order radial integration. As shown in
Table 1, MSSR sampling introduces only three additional sampling points compared with the traditional cubature Kalman filter (CKF) and just one more than the SSR rule, with 2n + 22n + 22n + 2 sampling points [
34]. In high-dimensional systems, the computational complexity of MSSR, CKF, and SSR sampling remains similar and is substantially lower than that of high-order CKF (HCKF), as supported by the sampling point data in
Table 1. According to [
35], MSSR sampling features positive weights, which satisfy the definition of a “good integration rule” as proposed in [
10], making MSSRCKF more accurate than the fifth-order SSRCKF [
36]. Overall, MSSRCKF outperforms SSRCKF in terms of filtering accuracy and is computationally more efficient than SSRHCKF [
37]. A detailed comparative analysis of these performance advantages has already been presented in our previous publication titled “Adaptive MSSRCPF Filtering Based on Constrained Optimization and Fading Memory for SINS/GNSS Integrated Navigation” [
38] and will not be repeated here.
Second, the MLG-AMSSRCPF algorithm improves the design of the importance density function by incorporating the matrix Lie group representation, enabling the system to better capture the non-Gaussian characteristics and higher-order statistical information of the state [
39]. This approach effectively mitigates particle degeneration, which is a common problem in traditional filtering algorithms when they are faced with complex noise environments, thereby improving the filtering accuracy and robustness.
In addition, the algorithm introduces an adaptive noise covariance update mechanism, which allows the filter to dynamically adjust the process and measurement noise covariance matrices based on real-time measurement data. This greatly enhances the filter’s ability to adapt to changes in noise characteristics, ensuring system stability and accuracy in complex and dynamic environments.
Finally, the MLG-AMSSRCPF algorithm uses Euclidean distance to measure the similarity between particles and dynamically adjusts the particle number, effectively preventing particle degeneration. This adaptive mechanism maintains particle diversity while reducing the computational burden. within addition to employing the multidimensional Huber loss function for adaptive weight adjustment, the algorithm effectively suppresses the influence of outliers on the weight distribution, further enhancing the robustness and stability of the system. The proposed MLG-AMSSRCPF algorithm avoids the singularities of Euler angles near ±180° and is theoretically applicable to any initial misalignment within the range of −180° to +180°. It enables convergence from arbitrary attitude error states without requiring coarse alignment, demonstrating strong adaptability for engineering applications.
In conclusion, the MLG-AMSSRCPF algorithm, through matrix Lie group representation strategies, mixed-order sampling methods, dynamic noise covariance matrix adjustment, and adaptive particle number and weight adjustment mechanisms, significantly improves on the filtering accuracy, computational efficiency, and robustness of other algorithms. The algorithm demonstrates outstanding performance in high-dimensional nonlinear and non-Gaussian environments, making it particularly suitable for complex application scenarios such as large misalignment angle initial alignment, with extensive practical application potential.
6. Simulation Analysis
Assume that an autonomous underwater vehicle (AUV) operates for 500 s. From 0 to 50 s, the vehicle moves at a constant speed. From 50 to 100 s, it accelerates with an acceleration of 0.5 m/s
2. Then, from 100 to 500 s, it resumes constant-speed motion. The yaw, pitch, and roll angles are as follows:
Here, represents the initial heading angle (in degrees, °); , , and denote the oscillation amplitudes of the heading, pitch, and roll angles, respectively (in degrees, °). The corresponding angular frequencies , , and are given in radians per second (rad/s) and are calculated by , where denotes the oscillation period (in seconds, s). , , and are the initial phase offsets (in radians, rad) used to simulate phase disturbances in each attitude component. The parameters are set as = 13°, = 6°, = 12°, = 8 s, = 8 s, = 10 s, and = 0. The initial position is set to a latitude of 45.7800° N and a longitude of 126.6650° E.
The initial estimate of the system state is assumed to be
, with initial misalignment angles
. The initial velocity error is set to 0.1 m/s, and the velocity measurement error is also 0.1 m/s. The gyroscope exhibits a constant bias drift of 0.02°/h and a random noise level of 0.005°/h. The accelerometer has a bias of 1 × 10
−4 g and a random noise level of 5 × 10
−5 g.
denotes the initial covariance matrix of the state variables, Q is the process noise covariance matrix, and R is the measurement noise covariance matrix.
To verify the effectiveness of the MLG-AMSSRCPF algorithm, it is applied to a simulation analysis of the initial alignment of a strapdown inertial navigation system (SINS) under large azimuth misalignment conditions on a dynamic platform. The estimation accuracy of the proposed algorithm is compared with that of the traditional cubature particle filter (CPF) and unscented Kalman filter (UKF) algorithms. Three simulation scenarios are designed as follows:
- (1)
No anomalies in the measurement values and system noise;
- (2)
A simulated measurement disturbance is applied to the velocity observations, where random measurement values are selected within a specified time interval and artificially contaminated with 3 m/s outliers, while the system noise remains unchanged;
- (3)
The system noise matrix is set to Q′ = 10 Q, while the measurement values remain unaffected by anomalies.
Since the roll and pitch misalignment angles are small, the filtering algorithm will converge quickly. Therefore, only the simulation results of the heading misalignment angle are presented below.
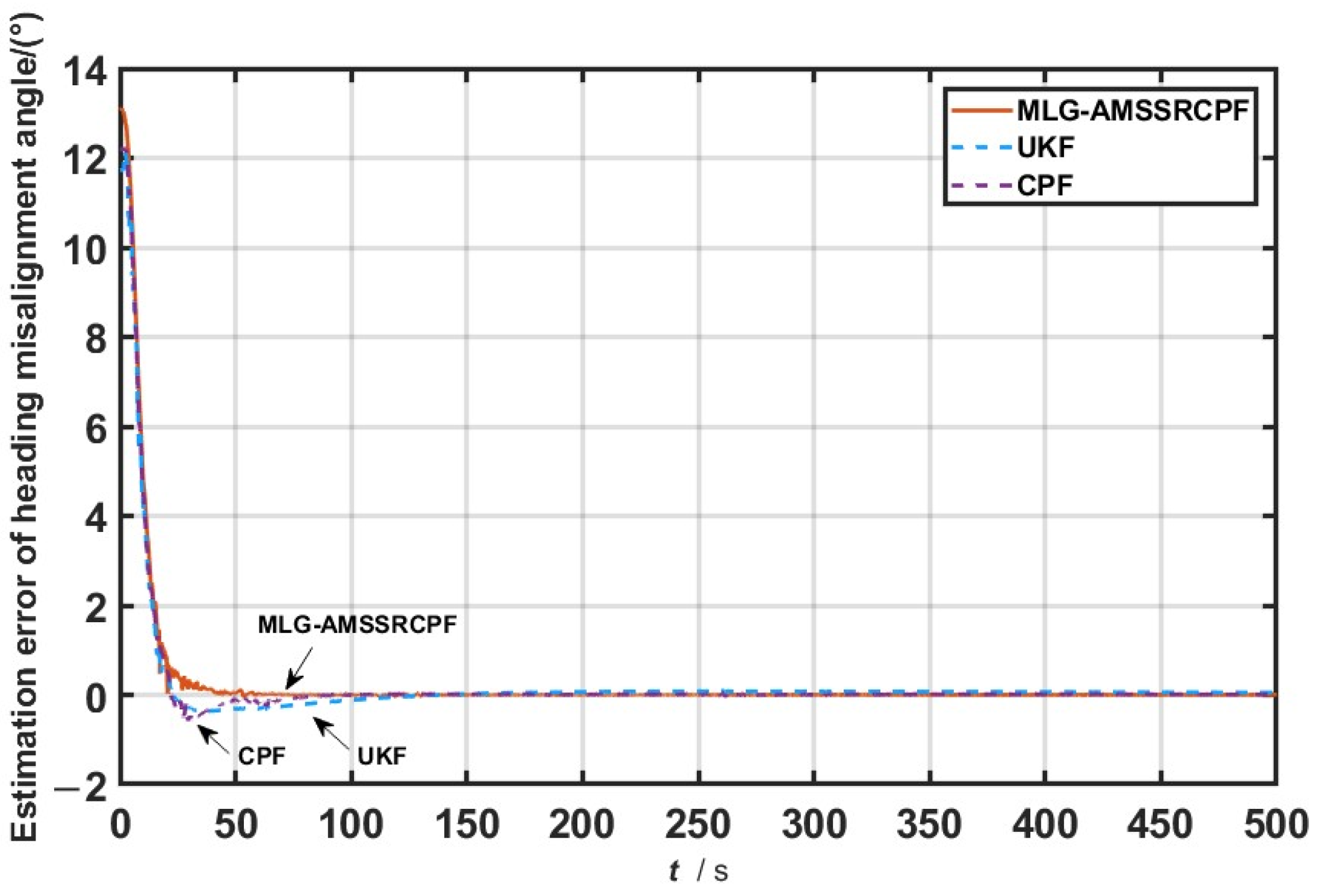
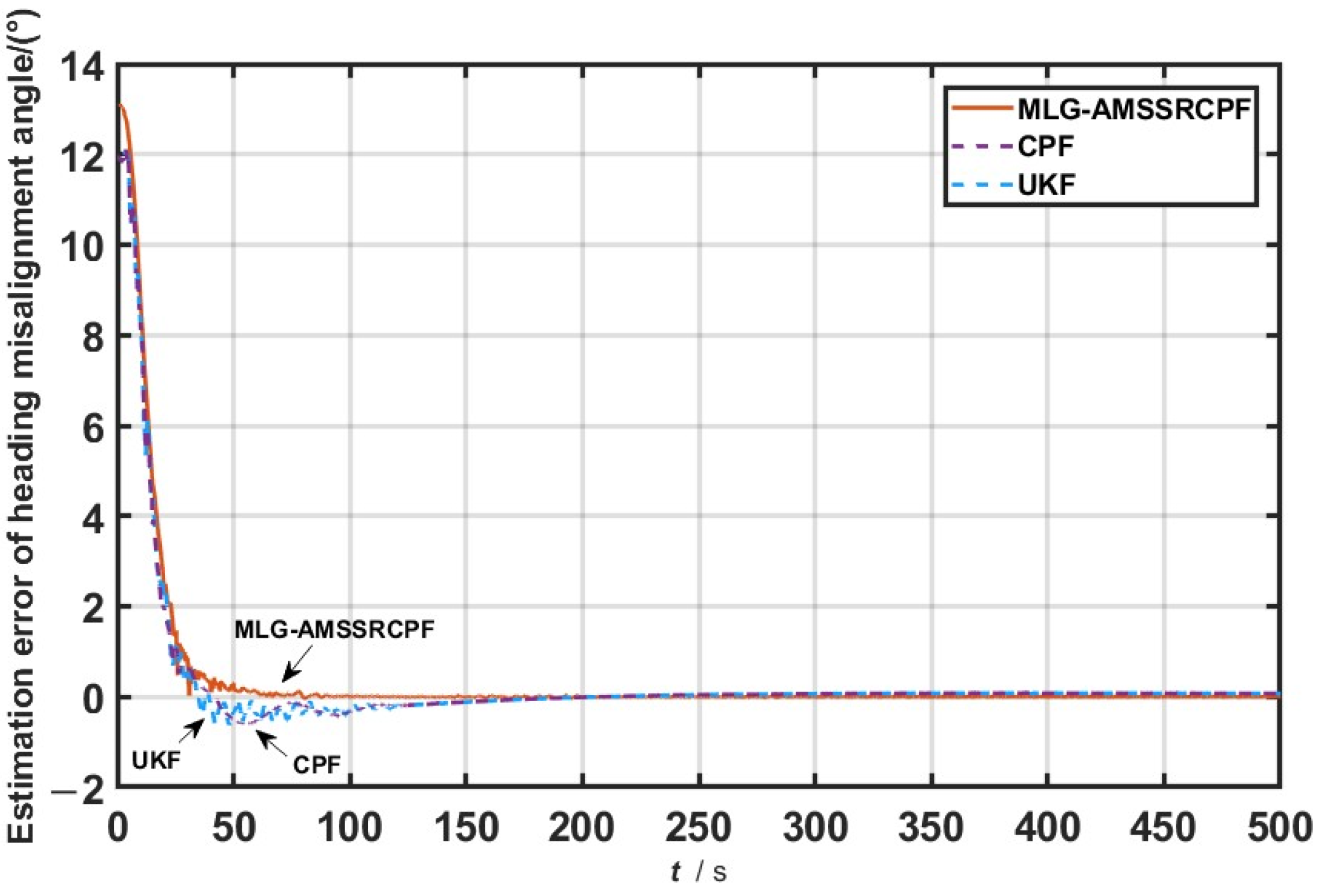
As shown in
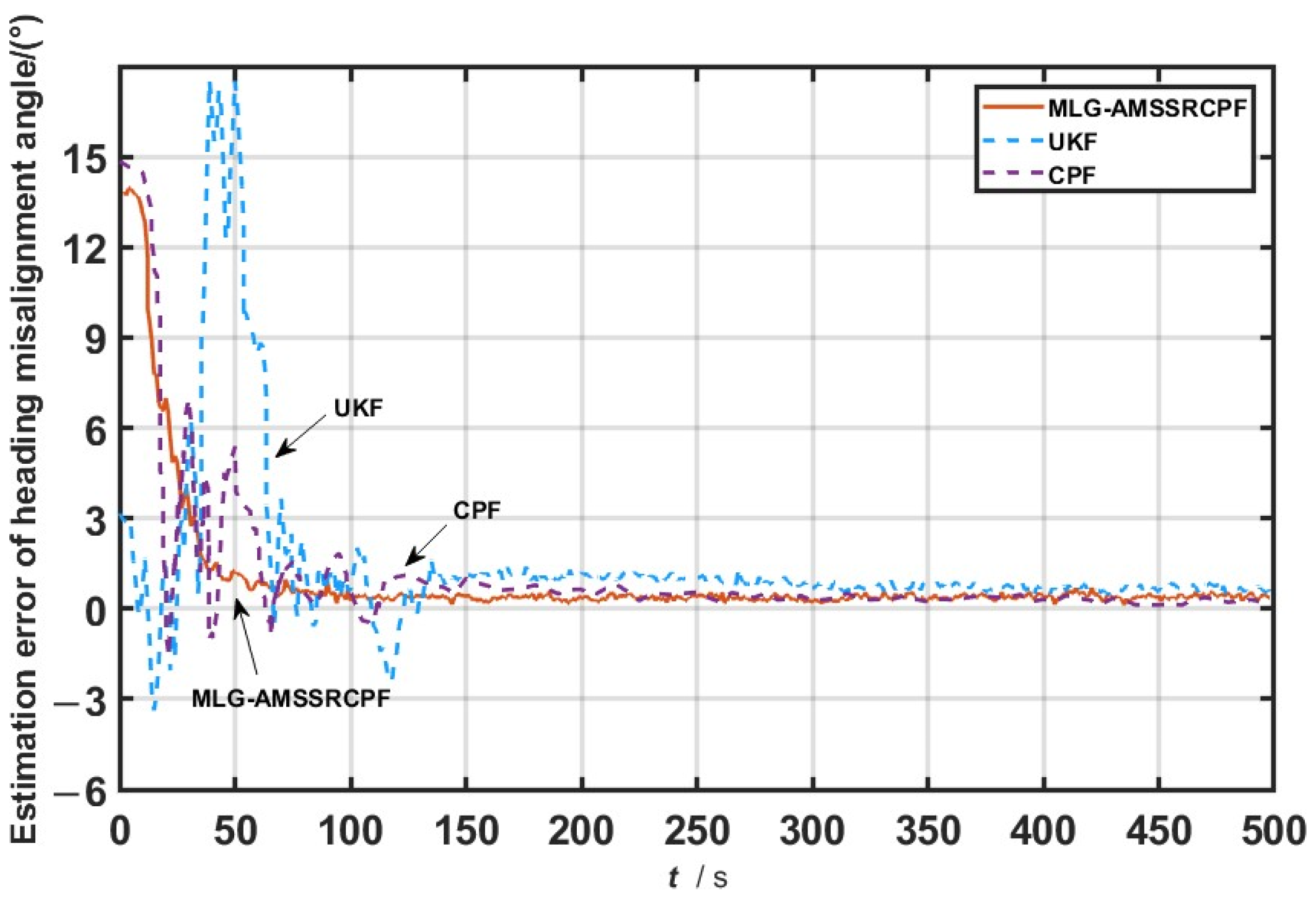
Figure 4, when the system model operates under normal conditions without any anomalies, the filtering performances of the CPF, UKF, and MLG-AMSSRCPF algorithms are highly similar. This is primarily due to the inherent randomness in the particle generation process, which introduces only minor deviations in the filtering results. In
Figure 5, where gross errors are present in the measurement data, the CPF and UKF algorithms exhibit noticeable fluctuations during the initial filtering phase. In contrast, the MLG-AMSSRCPF algorithm demonstrates significantly more stable performance, with minimal occurrences of abrupt “spikes”. This indicates that the proposed algorithm possesses a strong ability to mitigate the impact of measurement outliers, and thereby maintains the stability and reliability of the filtering process.
Figure 6 shows that, when the system noise statistics are inaccurate, the MLG-AMSSRCPF algorithm still maintains a high level of estimation accuracy for the heading misalignment angle. In comparison, both the CPF and UKF algorithms fail to overcome the limitations caused by incorrect noise modeling, resulting in larger estimation errors and slower convergence rates. The estimation accuracies for all three simulation scenarios are summarized in
Table 2.
From
Table 2, it can be seen that the MLG-AMSSRCPF algorithm effectively mitigates the impacts of gross measurement errors and system noise uncertainty, thereby exhibiting an improved estimation accuracy.
As shown in
Table 2, the MLG-AMSSRCPF algorithm consistently outperforms both the CPF and UKF algorithms in terms of its estimation accuracy across all three simulation scenarios. In particular, under Scenario 2 and Scenario 3, the MLG-AMSSRCPF algorithm demonstrates significantly stronger suppression capabilities than the CPF algorithm when dealing with measurement outliers and inaccurate system noise statistics. Specifically, in Scenario 1, the heading error of the MLG-AMSSRCPF algorithm is reduced by 8.91% compared to that of CPF. In Scenario 2, the reduction reaches 31.29%, and in Scenario 3, it further improves to 39.79%. In addition, when compared with the UKF algorithm, the MLG-AMSSRCPF algorithm also exhibits enhanced robustness and adaptability in all three scenarios. The heading error is reduced by 11.49% in Scenario 1, 58.52% in Scenario 2, and 58.82% in Scenario 3. These results clearly demonstrate the robustness and adaptability of the MLG-AMSSRCPF algorithm in complex dynamic environments, highlighting its strong potential for practical application in high-precision state estimation tasks.
7. Experimental Validation
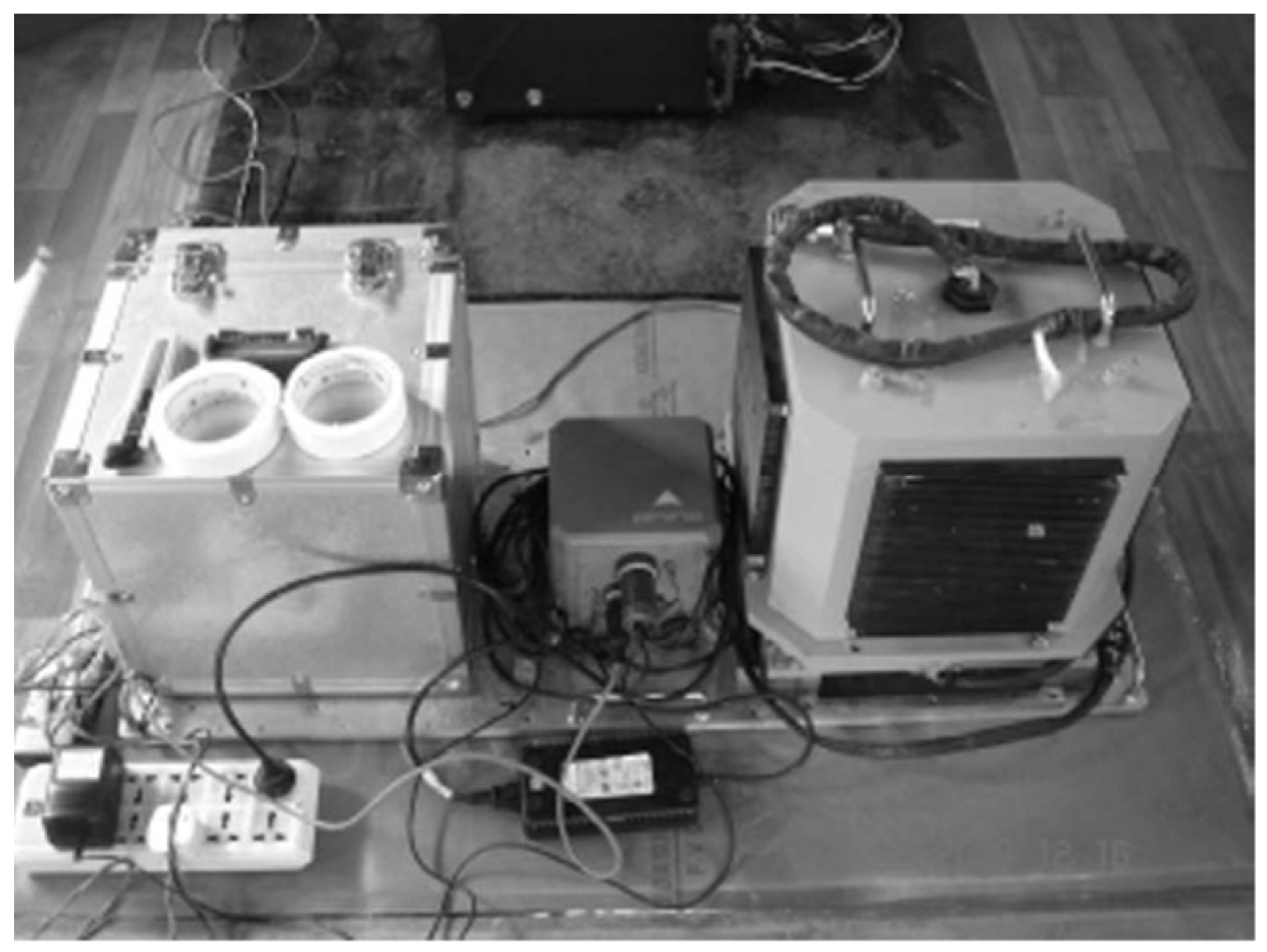
To further verify the practical feasibility of the proposed MLG-AMSSRCPF algorithm for the initial alignment of underwater vehicles on a marine dynamic platform, a comparative experiment was conducted using real-world measurement data obtained from a sea trial. The traditional CPF and UKF algorithms, along with the proposed MLG-AMSSRCPF algorithm, were applied for comparative analysis. The installation layout of the experimental equipment is illustrated in
Figure 7. As shown, the ballast box is positioned on the left, the Doppler velocity log (DVL) is mounted in the center, and the fiber optic gyroscope is located on the right.
The performance specifications of the fiber optic gyroscope (FOG) are as follows: dynamic range of
; zero bias stability ≤ 0.005°/h; random walk ≤ 0.001°/h; calibration factor ≤ 5 ppm. The performance specifications of the accelerometer are as follows: dynamic range of ±4 g; zero bias stability ≤ 1 × 10
−5 g. The performance specifications of the DVL are as follows: measurement accuracy of 0.01 m/s, measurement range of 0–10 m/s, measurement frequency of 2 Hz, and system error of ±0.02 m/s. The offshore motion-base alignment test was conducted in Qingdao, China, at a latitude of 35.98° N and longitude of 120.20° E. A total of 10 motion-base alignment trials were completed in a free navigation state. Offline semi-physical simulations were performed on the raw data collected during the trials. Since the alignment time was short, it was assumed that the gyro error consisted of constant drift and white noise, while the accelerometer error was modeled as a zero-bias with white noise. Out of the 10 trials, 8 trials showed that the MLG-AMSSRCPF algorithm outperformed the CPF and UKF algorithms, while the alignment results in the remaining 2 trials were similar.
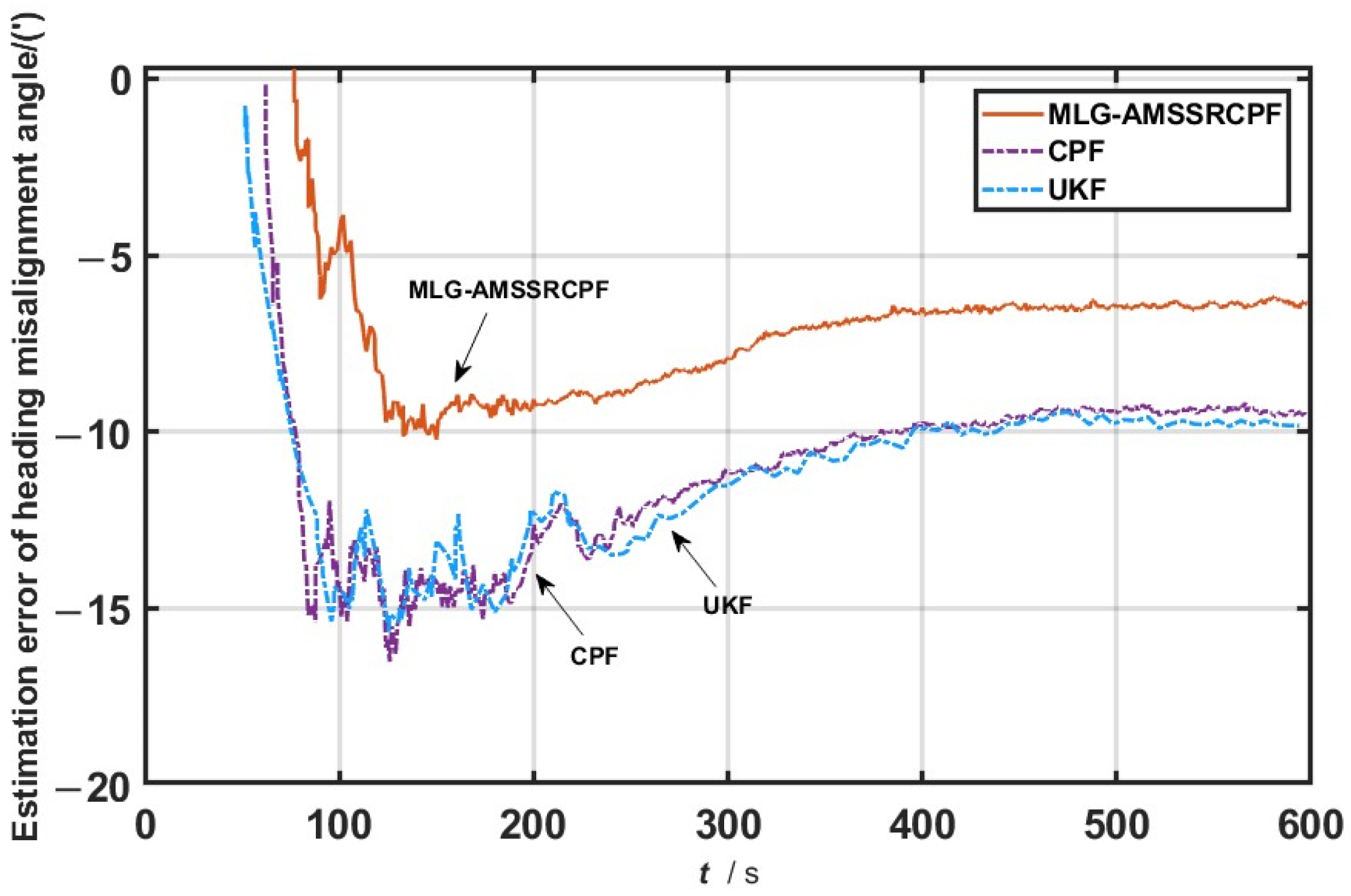
Figure 8 displays the heading misalignment angle estimation error curve from one of the 10 trials, and the average estimation errors of both algorithms are shown in
Table 3.
In this experiment, the Doppler Velocity Log (DVL) exhibited brief velocity spikes, resulting in outliers within the measurement data. Additionally, due to sea-state disturbances, the gyroscope bias showed slight fluctuations during the alignment process, indicating non-ideal characteristics in the system noise statistics. These phenomena were observed across multiple trials, confirming the presence of real measurement outliers and noise uncertainty under the experimental conditions.
From the motion-base alignment test results presented in
Figure 8 and
Table 3, it is evident that the proposed MLG-AMSSRCPF algorithm achieves significantly higher alignment accuracy than the traditional CPF and UKF algorithms. According to the data in
Table 3, in one of the sea trials, the average estimation error of the heading misalignment angle using MLG-AMSSRCPF was 6.78′, representing a 28.8% reduction compared to the 9.52′ obtained with the CPF algorithm. Furthermore, compared to the UKF algorithm, which exhibited an average error of 9.96′, the MLG-AMSSRCPF algorithm achieved an improvement of approximately 31.9%. This notable enhancement in alignment performance is primarily attributed to the algorithm’s robust capability to manage anomalous measurement data and inaccuracies in the statistical properties of system noise during the motion-base alignment process.
During the motion-base alignment process, measurement data may be disturbed by external factors, leading to gross errors in the resulting observations, while uncertainties in system noise characteristics may introduce additional errors. The traditional CPF and UKF algorithms are quite sensitive to these issues, which results in decreased estimation accuracy and stability. In contrast, the MLG-AMSSRCPF algorithm effectively mitigates the impact of measurement outliers and achieves an enhanced adaptability to variations in system noise through the introduction of a matrix Lie group-based error optimization mechanism, mixed-order sampling, adaptive noise covariance adjustment, and self-adjusting particle count and weight strategies. These features enable the algorithm to provide higher alignment accuracy and faster convergence in complex dynamic marine environments, fully demonstrating its robustness and superior performance in practical applications.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}