
A Novel Dynamic Contextual Feature Fusion Model for Small Object Detection in Satellite Remote-Sensing Images


Abstract
1. Introduction
- (1)
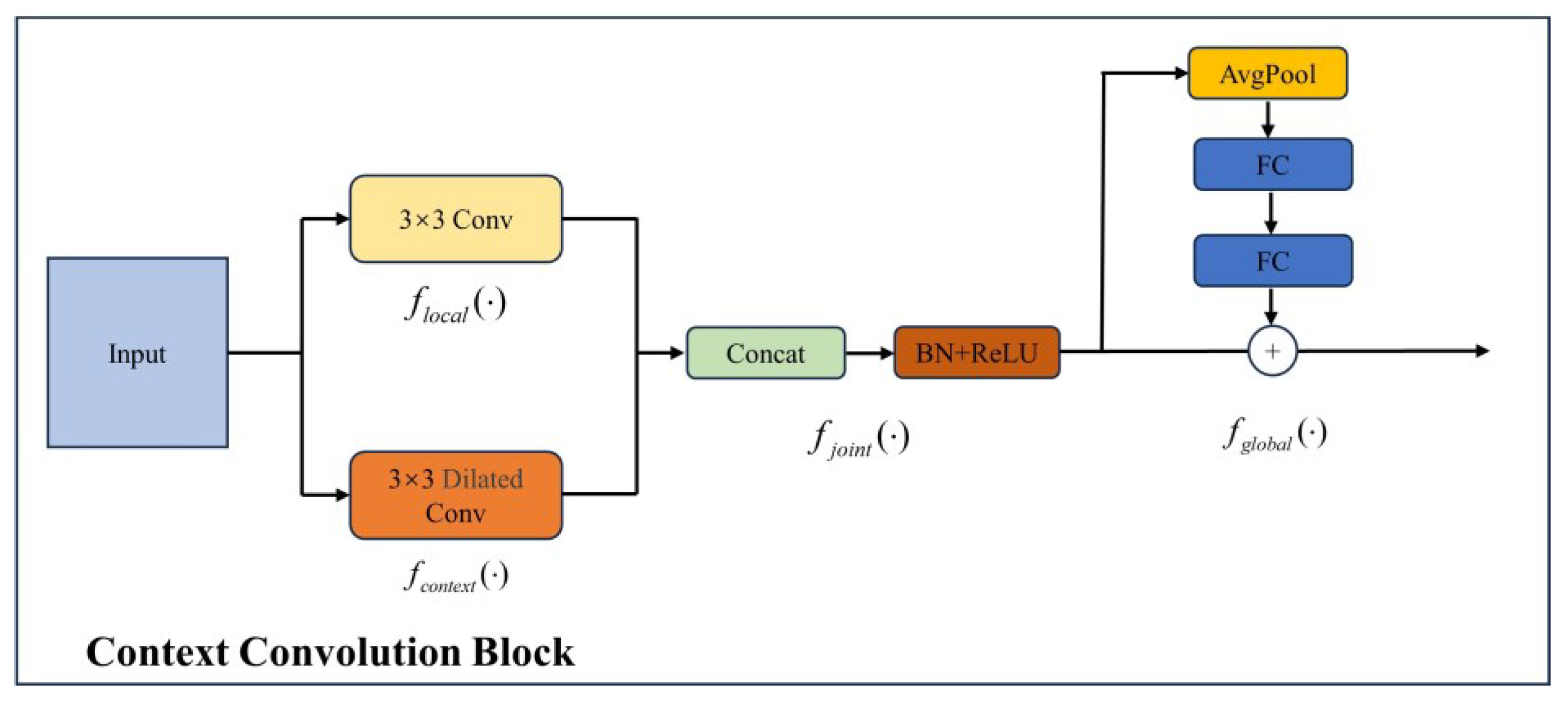
- We proposed the lightweight Context Convolution Block to extract both local features and contextual features, using channel-wise group convolution to reduce the parameters and computations. In our work, the Context Convolution Block is designed to replace the C2f block in the YOLOv8 backbone network;
- (2)
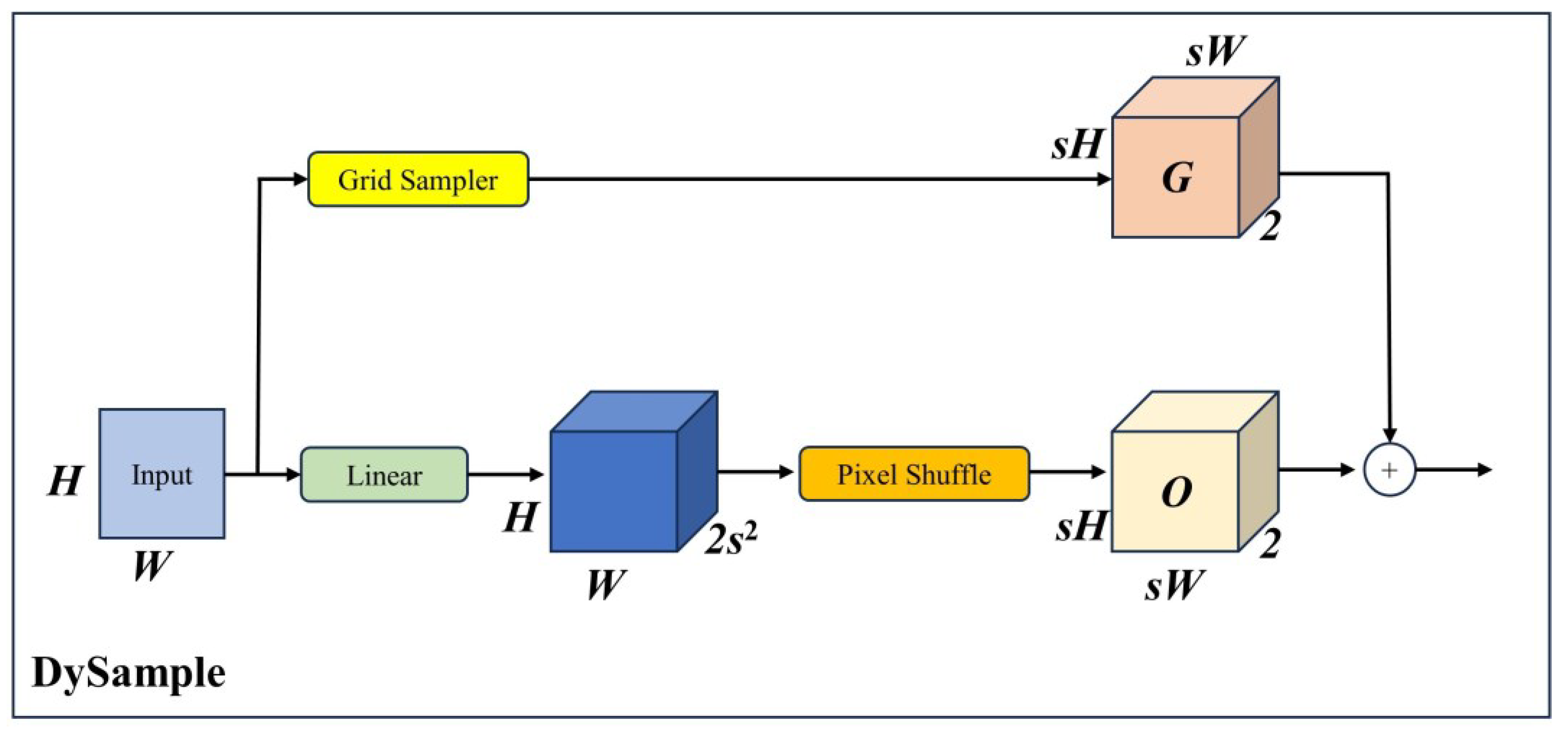
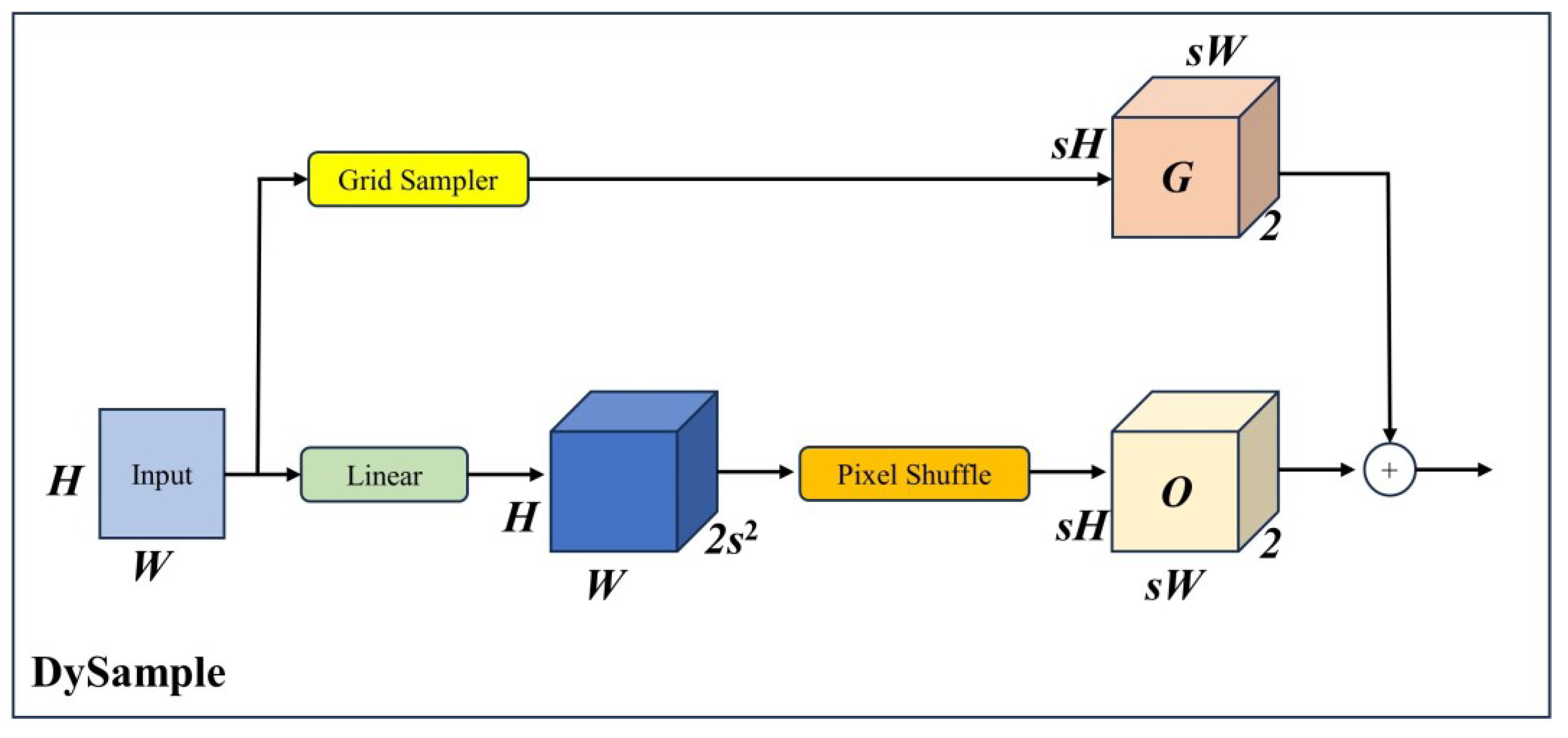
- We employ the DySample [9] module, a dynamic upsampler, to improve the upsample path of the multi-scale feature fusion;
- (3)
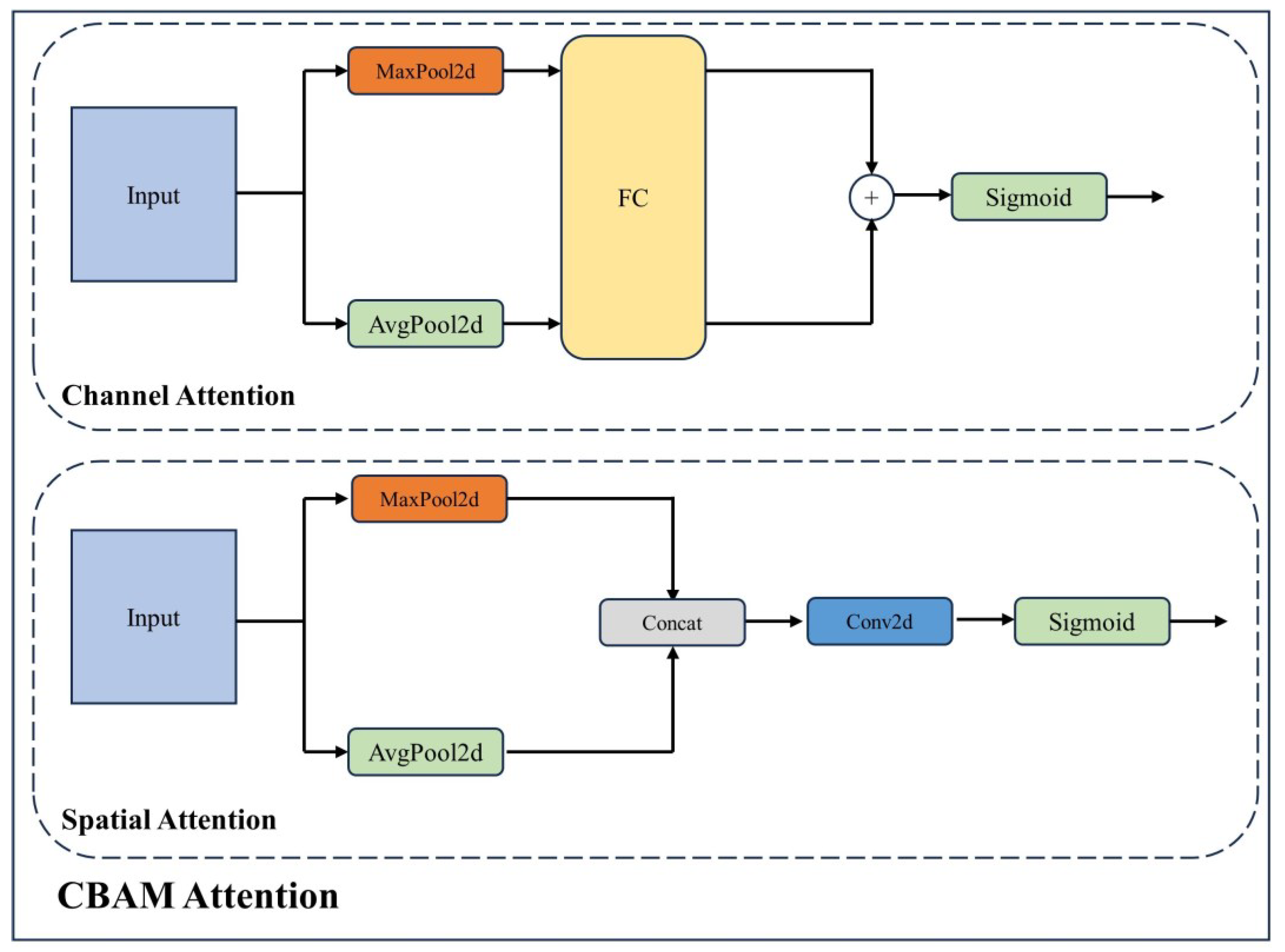
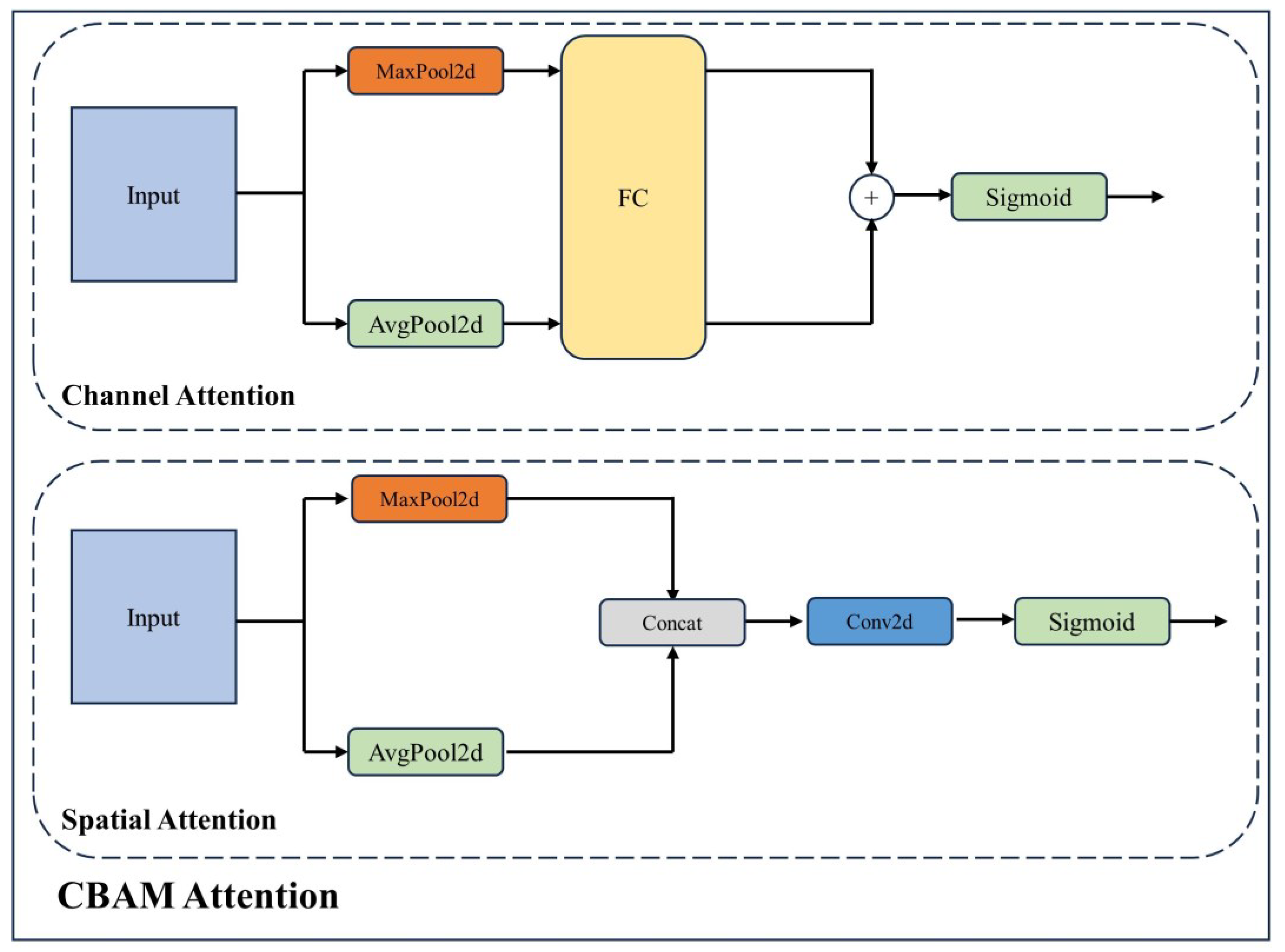
- To help the model focus on the features of objects and learn the intra-layer feature representation of objects, we build the attention-guided feature fusion by integrating the Convolutional Block Attention Module (CBAM) [10] attention in the feature pyramid;
- (4)
- We have applied the proposed DCFF-YOLO to satellite image datasets, and the evaluation shows that our research takes advantage of the average precision index and efficiency.
2. Related Works
2.1. Object Detection in Satellite Remote-Sensing Images
2.2. Small Object Detection, Context Extraction, and Multi-Scale Feature Fusion
3. Method
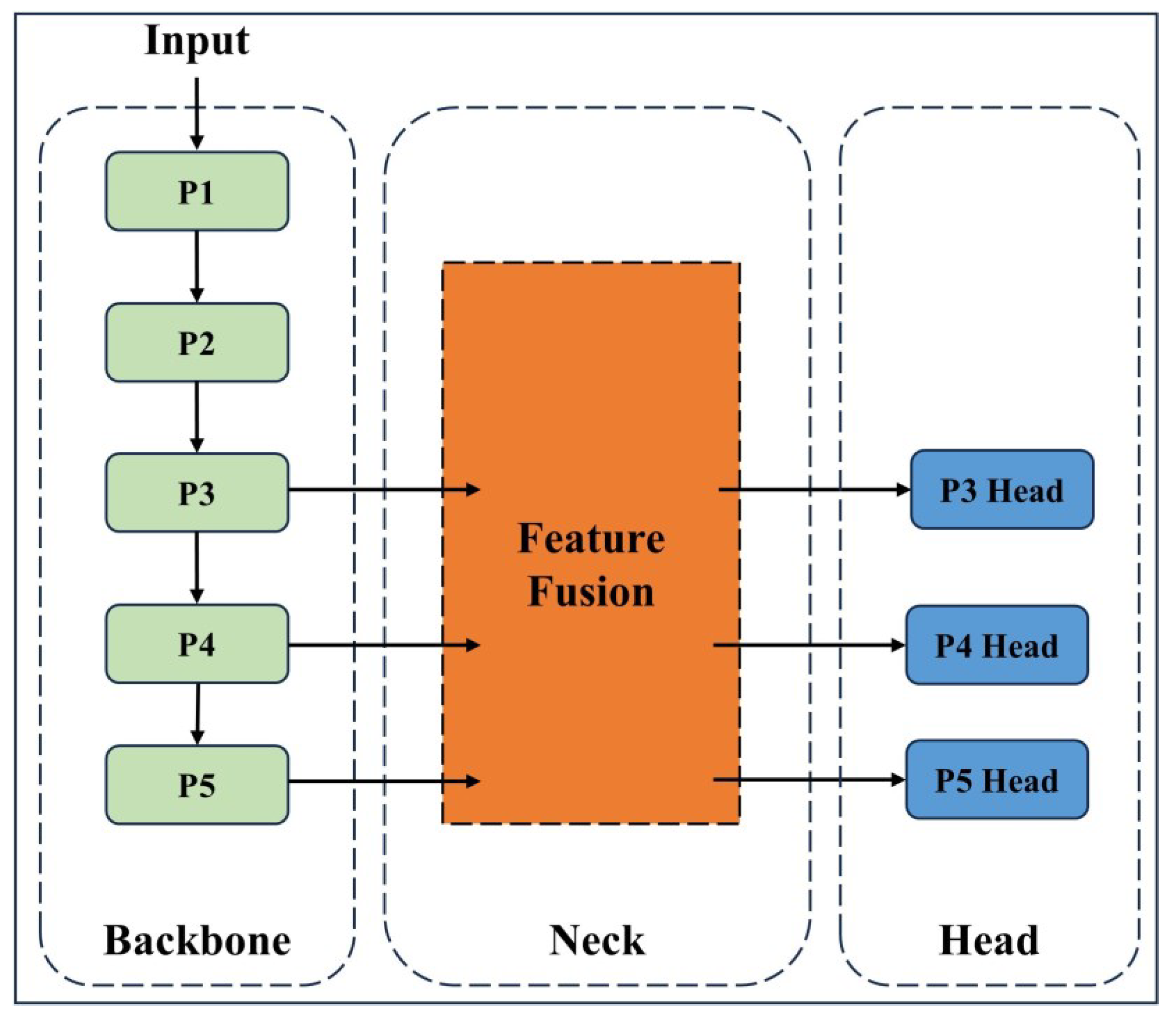
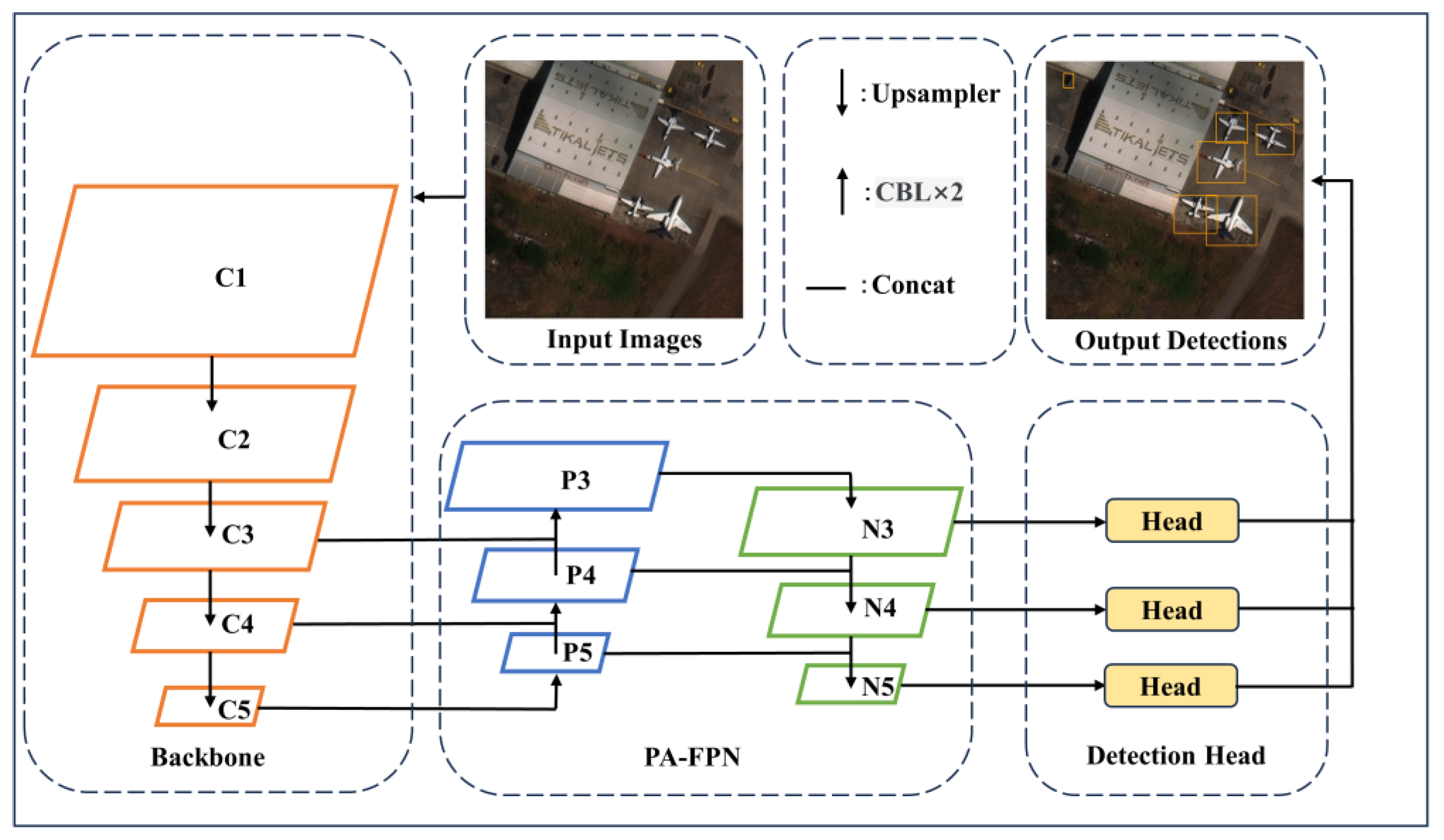
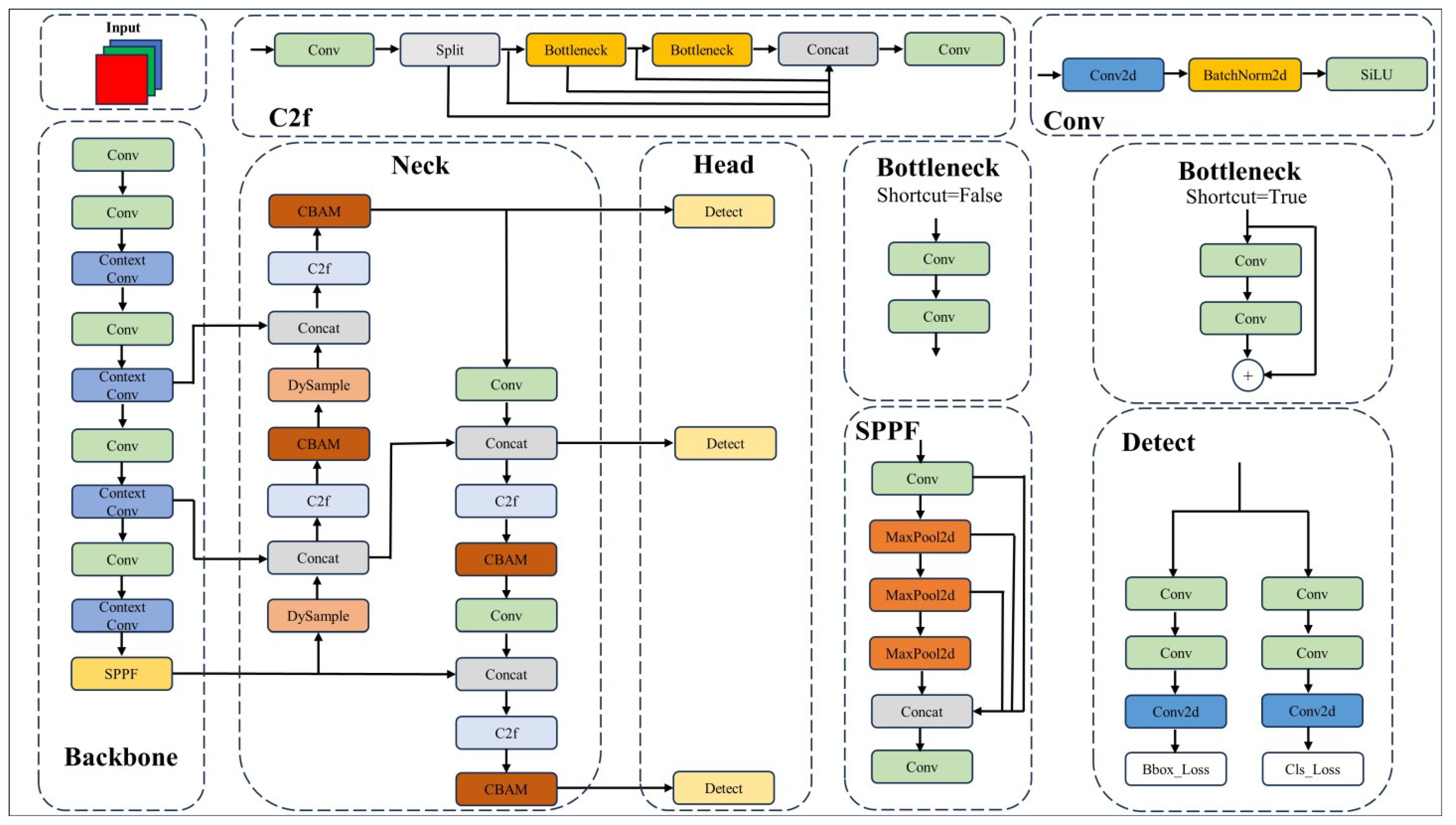
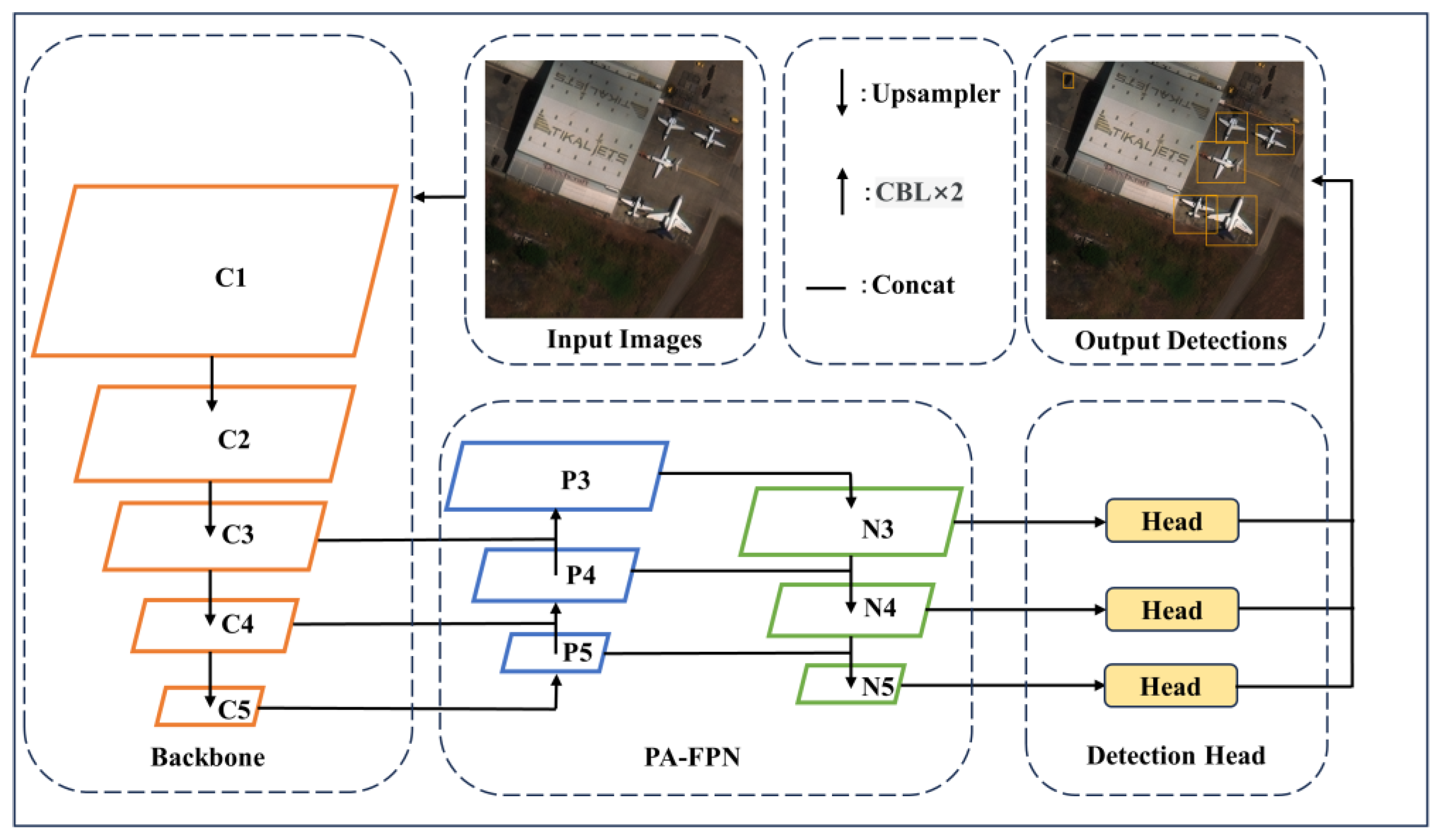
3.1. Overall Architecture
3.2. Context Convolution Block
3.3. Attention-Guided Feature Fusion
4. Experiments and Results
4.1. Metrics
4.2. Implementation Details and Dataset
4.3. Quantitative Results
4.4. Visualization
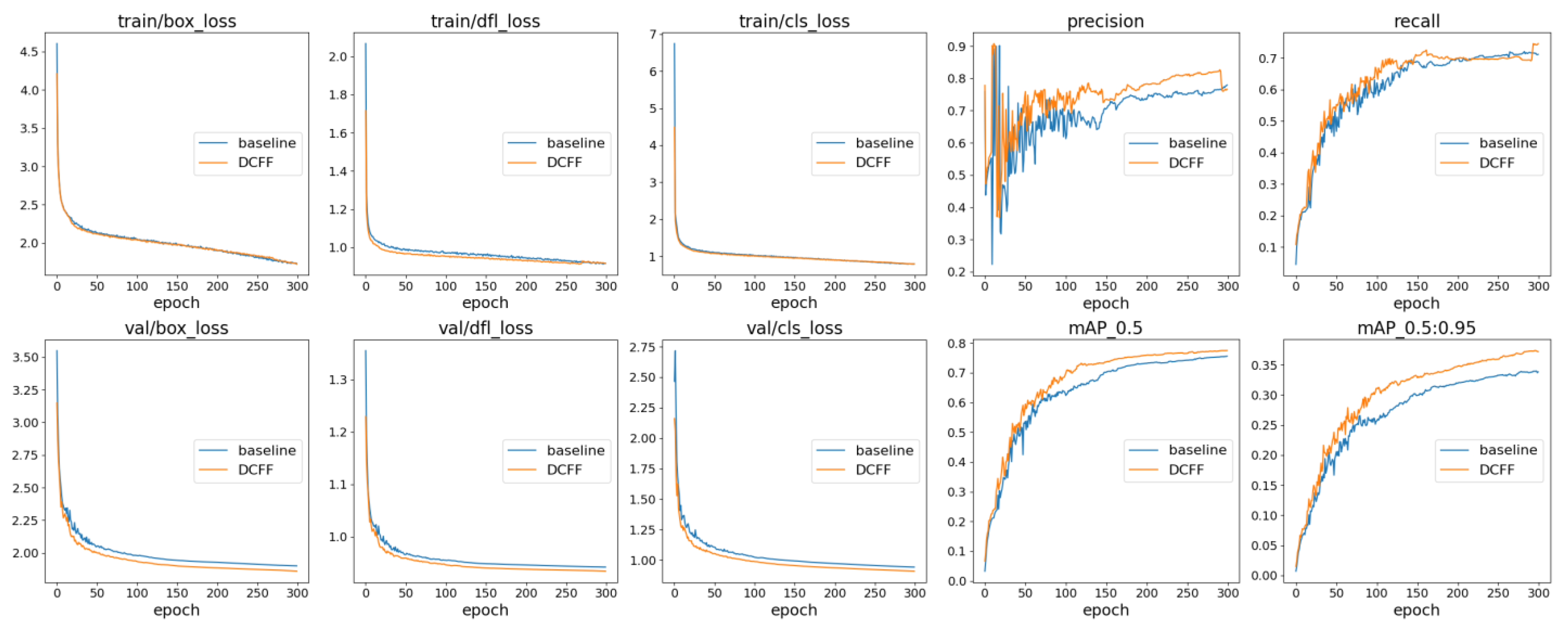
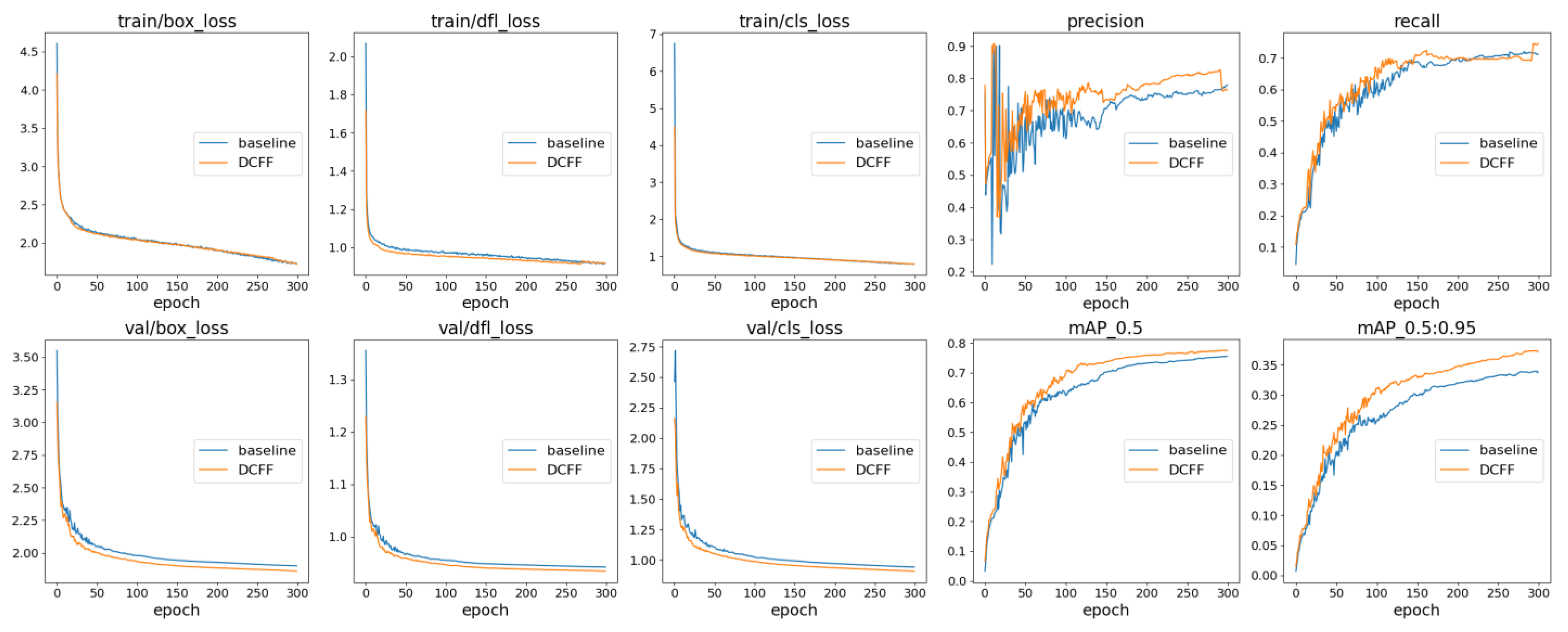
4.4.1. Training Process
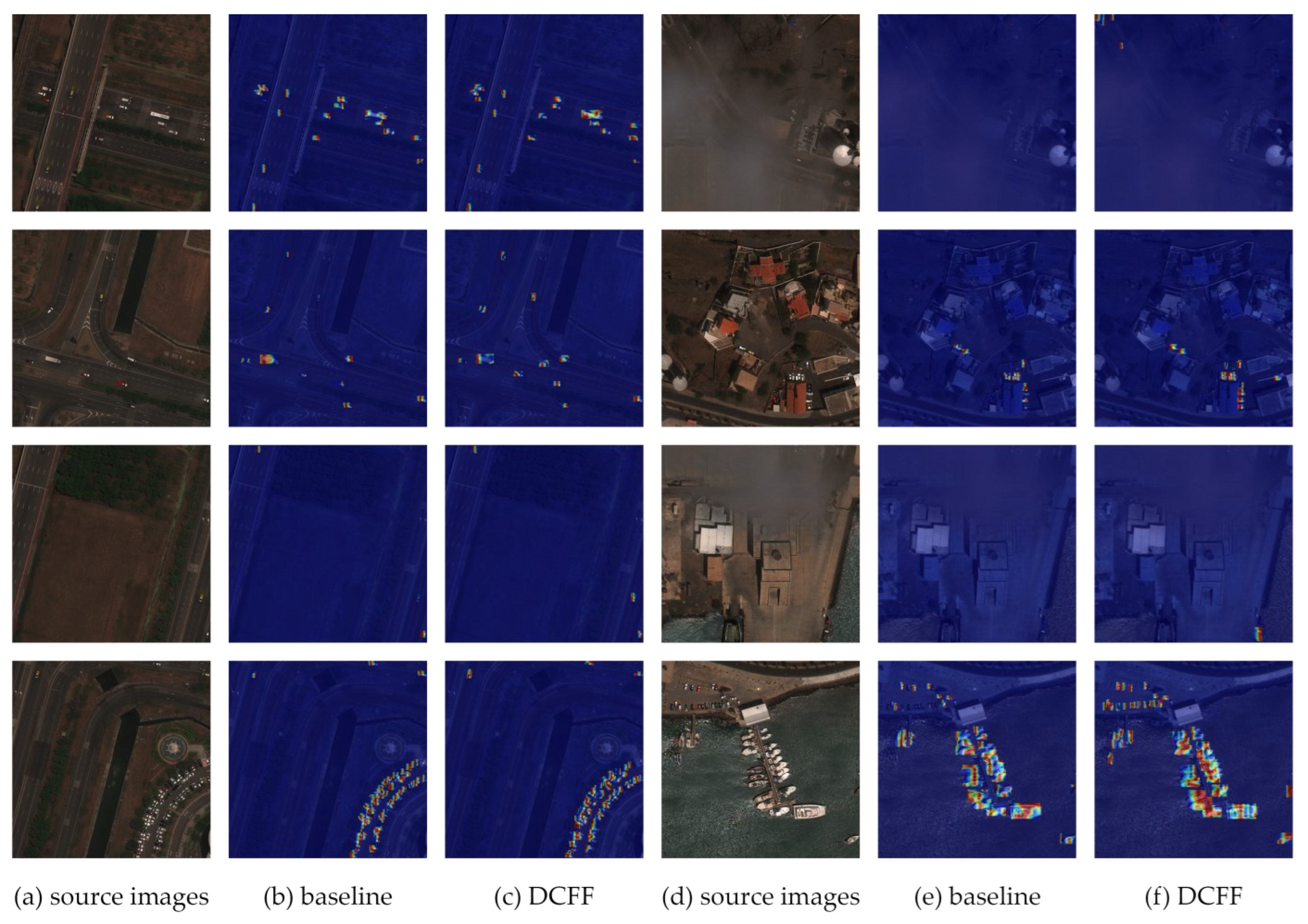
4.4.2. Visualization of the Feature Response
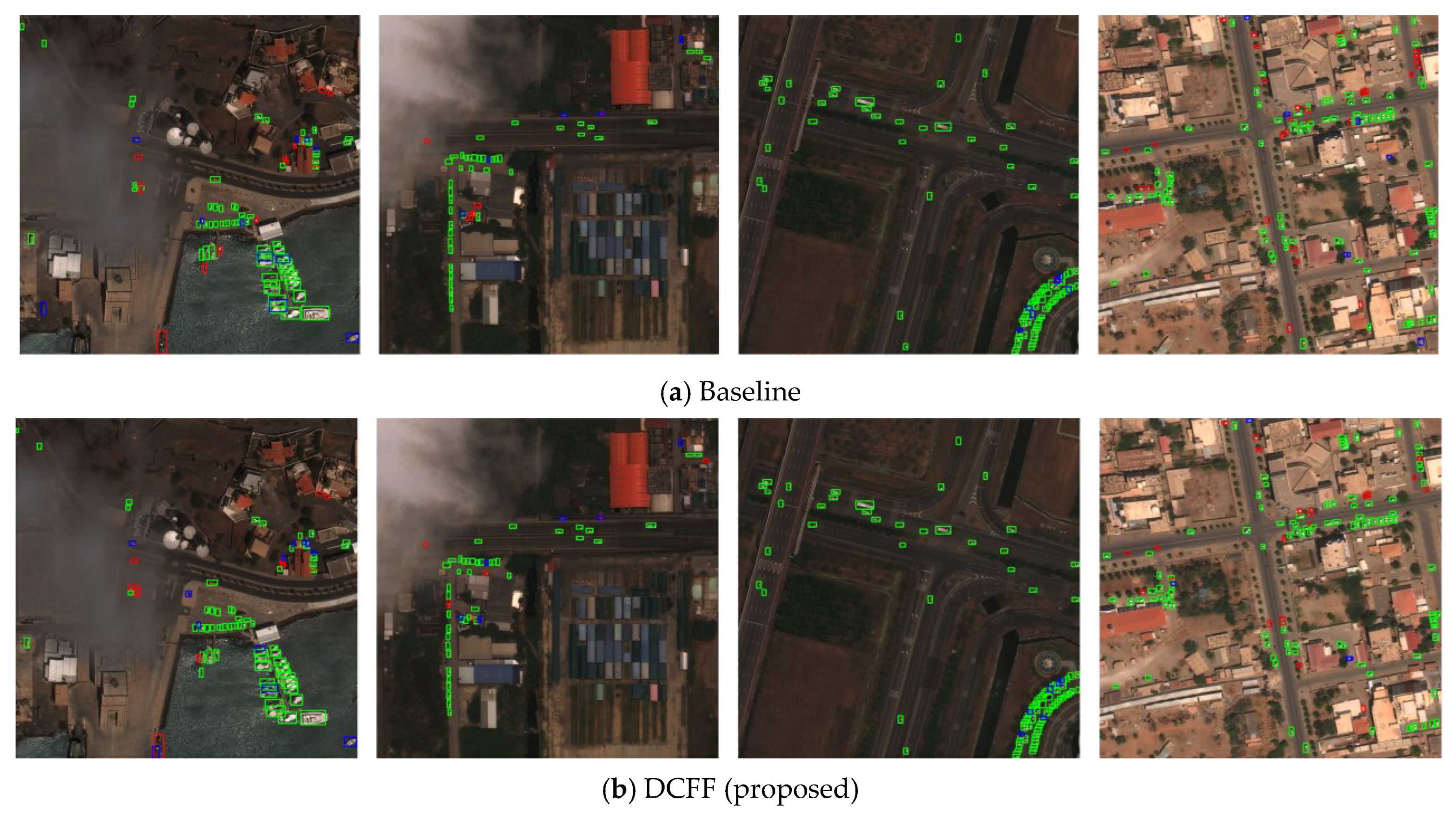
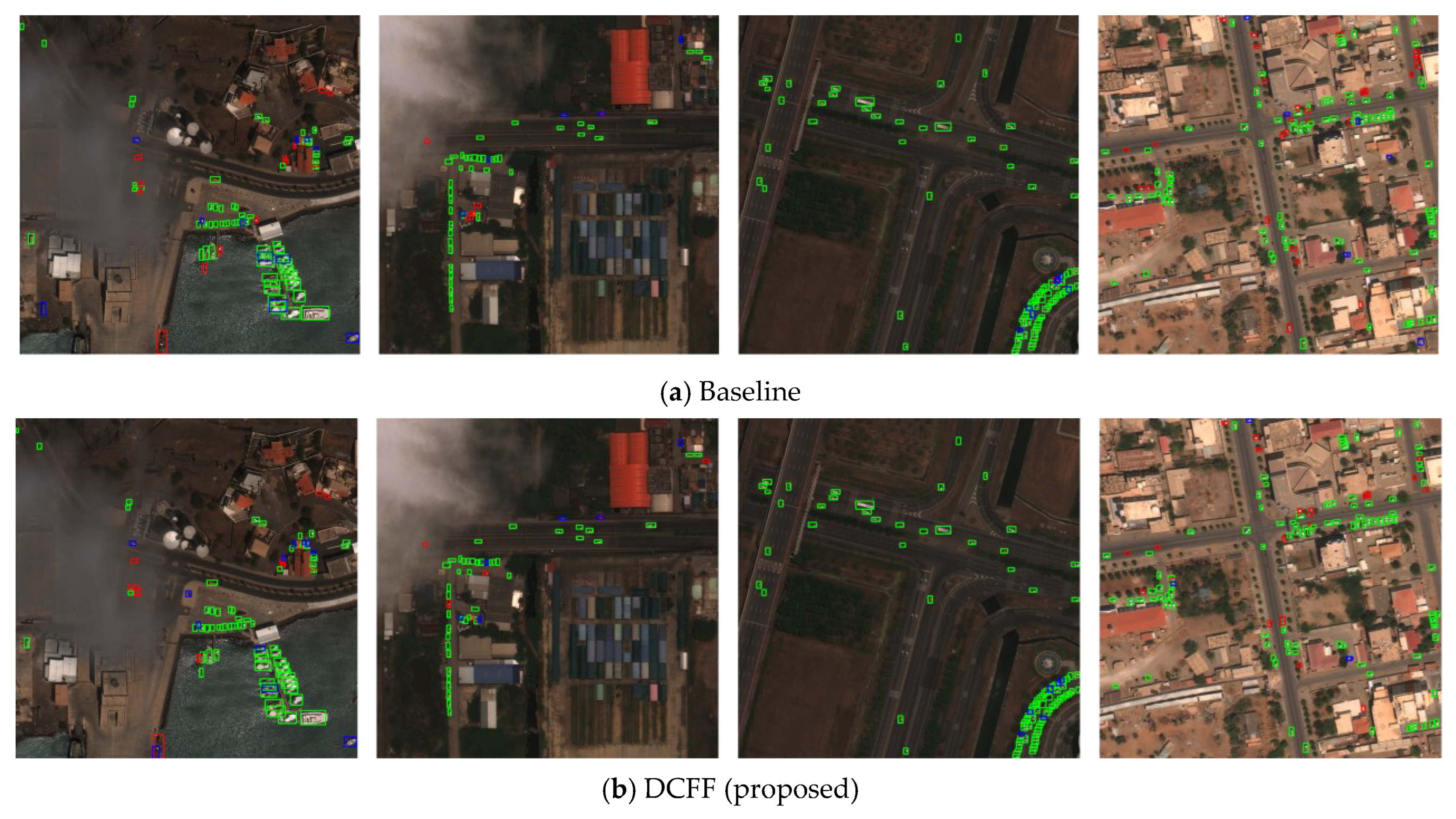
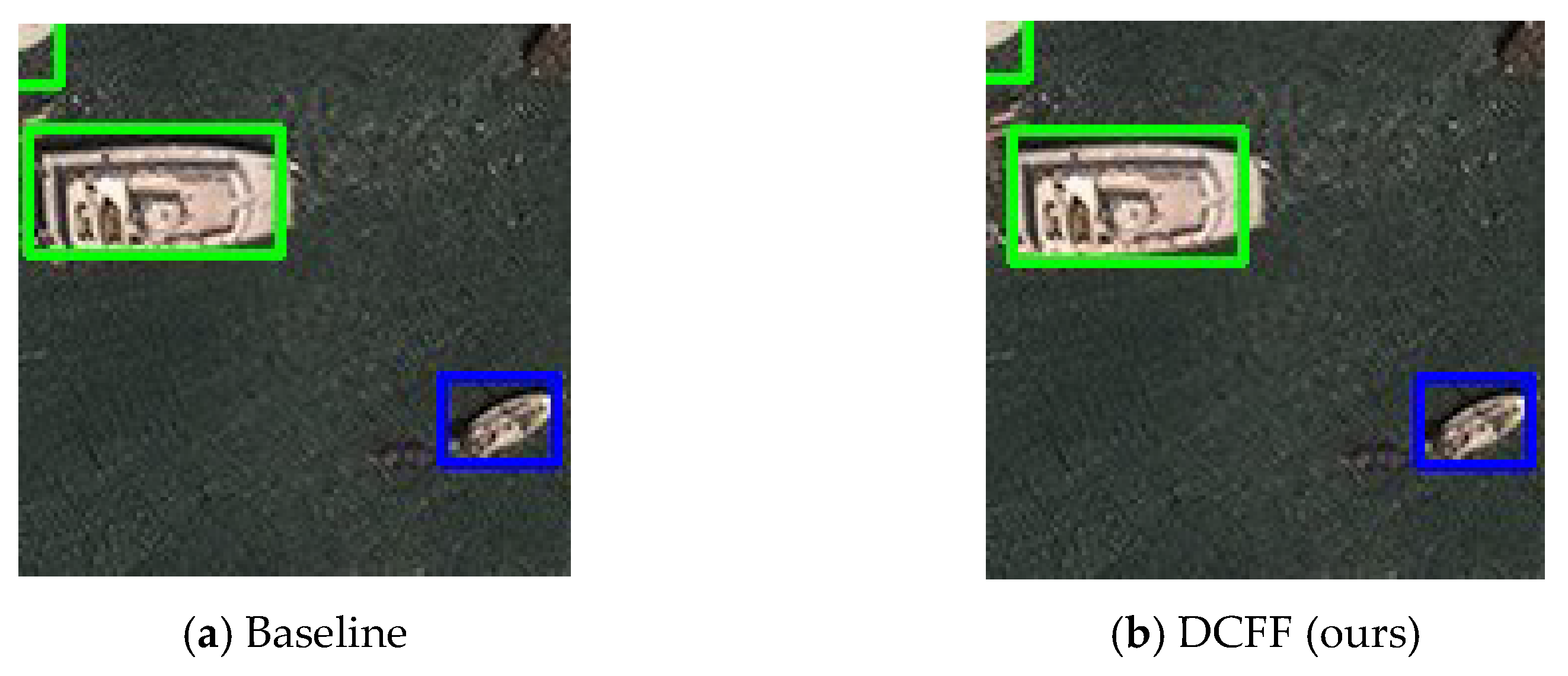
4.4.3. Visualization of the Detection
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems 25, Proceedings of the 26th Annual Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Pereira, F., Burges, C.J., Bottou, L., Weinberger, K.Q., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2012. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft Coco: Common Objects in Context. In Proceedings of the Computer Vision—ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal Speed and Accuracy of Object Detection. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wu, T.; Tang, S.; Zhang, R.; Cao, J.; Zhang, Y. Cgnet: A Light-Weight Context Guided Network for Semantic Segmentation. IEEE Trans. Image Process. 2020, 30, 1169–1179. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, A.; Ye, Y.; Wang, R.; Liu, C.; Roy, K. Going Deeper in Spiking Neural Networks: VGG and Residual Architectures. Front. Neurosci. 2019, 13, 95. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Lu, H.; Fu, H.; Cao, Z. Learning to Upsample by Learning to Sample. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 6027–6037. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. Cbam: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Advances in Neural Information Processing Systems 28, Proceedings of the Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, Canada, 7–12 December 2015; Cortes, C., Lawrence, N., Lee, D., Sugiyama, M., Garnett, R., Eds.; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding Yolo Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Cheng, G.; Zhou, P.; Han, J. Learning Rotation-Invariant Convolutional Neural Networks for Object Detection in VHR Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7405–7415. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, J.; Weng, L.; Yang, Y. Rotated Region Based CNN for Ship Detection. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 900–904. [Google Scholar]
- Pan, X.; Ren, Y.; Sheng, K.; Dong, W.; Yuan, H.; Guo, X.; Ma, C.; Xu, C. Dynamic Refinement Network for Oriented and Densely Packed Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11207–11216. [Google Scholar]
- Li, Y.; Hou, Q.; Zheng, Z.; Cheng, M.-M.; Yang, J.; Li, X. Large Selective Kernel Network for Remote Sensing Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 16794–16805. [Google Scholar]
- Zhang, Y.; Ye, M.; Zhu, G.; Liu, Y.; Guo, P.; Yan, J. FFCA-YOLO for Small Object Detection in Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5611215. [Google Scholar] [CrossRef]
- Zhang, F.; Shi, Y.; Xiong, Z.; Zhu, X.X. Few-Shot Object Detection in Remote Sensing: Lifting the Curse of Incompletely Annotated Novel Objects. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5603514. [Google Scholar] [CrossRef]
- Li, W.; Li, W.; Yang, F.; Wang, P. Multi-Scale Object Detection in Satellite Imagery Based on YOLT. In Proceedings of the IGARSS 2019, IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 162–165. [Google Scholar]
- He, Q.; Sun, X.; Yan, Z.; Li, B.; Fu, K. Multi-Object Tracking in Satellite Videos with Graph-Based Multitask Modeling. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5619513. [Google Scholar] [CrossRef]
- Wang, X.; Wang, A.; Yi, J.; Song, Y.; Chehri, A. Small Object Detection Based on Deep Learning for Remote Sensing: A Comprehensive Review. Remote Sens. 2023, 15, 3265. [Google Scholar] [CrossRef]
- Yavariabdi, A.; Kusetogullari, H.; Celik, T.; Cicek, H. FastUAV-Net: A Multi-UAV Detection Algorithm for Embedded Platforms. Electronics 2021, 10, 724. [Google Scholar] [CrossRef]
- Lim, J.-S.; Astrid, M.; Yoon, H.-J.; Lee, S.-I. Small Object Detection Using Context and Attention. In Proceedings of the 2021 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Jeju Island, Republic of Korea, 13–16 April 2021; pp. 181–186. [Google Scholar]
- Cao, J.; Chen, Q.; Guo, J.; Shi, R. Attention-Guided Context Feature Pyramid Network for Object Detection. arXiv 2020, arXiv:2005.11475. [Google Scholar]
- Lau, K.W.; Po, L.-M.; Rehman, Y.A.U. Large Separable Kernel Attention: Rethinking the Large Kernel Attention Design in CNN. Expert Syst. Appl. 2024, 236, 121352. [Google Scholar] [CrossRef]
- Kim, S.-W.; Kook, H.-K.; Sun, J.-Y.; Kang, M.-C.; Ko, S.-J. Parallel Feature Pyramid Network for Object Detection. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 234–250. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and Efficient Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Chen, Y.; Zhang, C.; Chen, B.; Huang, Y.; Sun, Y.; Wang, C.; Fu, X.; Dai, Y.; Qin, F.; Peng, Y.; et al. Accurate Leukocyte Detection Based on Deformable-DETR and Multi-Level Feature Fusion for Aiding Diagnosis of Blood Diseases. Comput. Biol. Med. 2024, 170, 107917. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Huang, D.; Wang, Y. Learning Spatial Fusion for Single-Shot Object Detection. arXiv 2019, arXiv:191109516. [Google Scholar]
- Yang, G.; Lei, J.; Zhu, Z.; Cheng, S.; Feng, Z.; Liang, R. AFPN: Asymptotic Feature Pyramid Network for Object Detection. In Proceedings of the 2023 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Honolulu, HI, USA, 1–4 October 2023; pp. 2184–2189. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 10012–10022. [Google Scholar]
- Kang, M.; Ting, C.-M.; Ting, F.F.; Phan, R.C.-W. ASF-YOLO: A Novel YOLO Model with Attentional Scale Sequence Fusion for Cell Instance Segmentation. arXiv 2023, arXiv:231206458. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Objects Quantity | Mean Size |
|---|---|---|
| Vehicle | 442,636 | 12.4 |
| Ship | 1606 | 14.1 |
| Airplane | 1231 | 27.9 |
| Model | mAP50:95/% | mAP50/% |
|---|---|---|
| Baseline | 33.8 | 75.5 |
| YOLOX [16] | 20.4 | 52.7 |
| Mask-RCNN [15] | 22.2 | 59.6 |
| Swin-Transformer [35] | 26.2 | 64.3 |
| YOLOv8-s-P2 | 30.6 | 70.4 |
| LSK-Net [20] | 25.3 | 65.4 |
| LSKA [29] | 36.2 | 75.8 |
| AFPN [34] | 23.1 | 57.8 |
| ASF-YOLO [36] | 30.7 | 72.5 |
| BIFPN [31] | 27.9 | 71.2 |
| HS-FPN [32] | 33.1 | 72.5 |
| DCFF-YOLO (ours) | 37.3 (+3.5) | 77.6 (+2.1) |
| Method | Metrics | |||
|---|---|---|---|---|
| Context Conv | DySample [9] | CBAM [10] | mAP50:95/% | mAP50/% |
| 33.8 | 75.5 | |||
| ✓ | 35.8 | 77.0 | ||
| ✓ | 35.3 | 75.6 | ||
| ✓ | ✓ | 35.8 | 75.5 | |
| ✓ | ✓ | ✓ | 37.3 | 77.5 |
| Model | ↓Parameters | ↓FLOPS | ↑FPS |
|---|---|---|---|
| Baseline | 11.1 M | 28.4 G | 168.1 |
| AFPN [34] | 8.9 M | 38.5 G | 57.4 |
| BIFPN [31] | 7.3 M | 25.2 G | 138.8 |
| Context Conv | 7.5 M | 19.5 G | 168.4 |
| DCFF-YOLO (ours) | 7.8 M | 18.8 G | 157.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Qiu, S. A Novel Dynamic Contextual Feature Fusion Model for Small Object Detection in Satellite Remote-Sensing Images. Information 2024, 15, 230. https://doi.org/10.3390/info15040230
Yang H, Qiu S. A Novel Dynamic Contextual Feature Fusion Model for Small Object Detection in Satellite Remote-Sensing Images. Information. 2024; 15(4):230. https://doi.org/10.3390/info15040230
Chicago/Turabian StyleYang, Hongbo, and Shi Qiu. 2024. "A Novel Dynamic Contextual Feature Fusion Model for Small Object Detection in Satellite Remote-Sensing Images" Information 15, no. 4: 230. https://doi.org/10.3390/info15040230
APA StyleYang, H., & Qiu, S. (2024). A Novel Dynamic Contextual Feature Fusion Model for Small Object Detection in Satellite Remote-Sensing Images. Information, 15(4), 230. https://doi.org/10.3390/info15040230