
MPC Framework for the Energy Management of Hybrid Ships with an Energy Storage System


Abstract
:1. Introduction
1.1. Regulatory and Technical Context for Battery Installations
- The shape of the efficiency curve of the prime mover is the dominant decisive factor for the applicability of an ESS installation
- When an ESS replaces engine power instead of adding power to an existing engine rating, the efficiency gains are smaller especially at nominal loads
- In electric propulsion, most conversion losses introduced by an ESS are already in place
- A DC grid allows for use of non-fixed-speed generator sets and consequently affects the powertrain efficiency in favour of using generator sets and not ESSs
- Efficiency gains in electric propulsion due to ESSs are found to be 4.7–7.8% at 50% load and 18–30% at 15% load.
1.2. Energy Management Stragegies and Problem Definition
1.3. Aim, Contributions and Assumptions
- Deals with battery-induced integral state constraints robustly.
- Realises potential fuel savings due to mission-scale information.
- Performs close to the exhaustive DP solution results.
- Can be readily set to function in charge-sustaining (CS) or charge-depleting (CD) battery mode.
- Enables real-time adaptation to shipboard updates on the mission-scale disturbance estimation while sailing, rather than using offline tuning of parameters such as the equivalency factor in ECMS, predefined power demand sequences [38] or rule-based tuning.
- Requires minimal parameter tuning on specific operating profiles enabling deployment on early design stages, with the prerequisite that a model description for the powertrain is available.
2. Materials and Methods
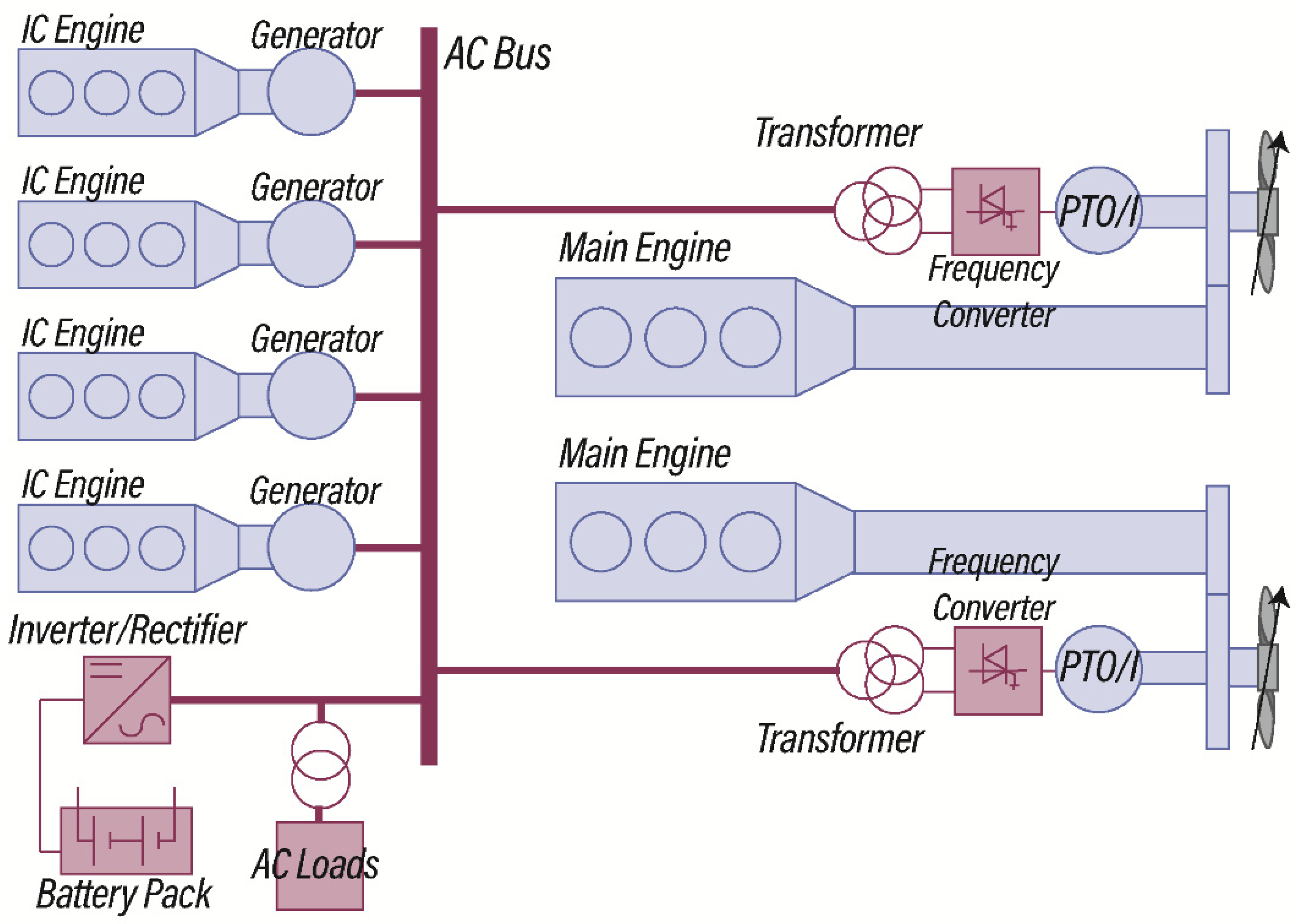
2.1. Model Description
- The electrical and mechanical nodes of the plant correspond to energy balance equations.
- For a given disturbance vector, which is typically comprised by the propulsive load, hotel load and shaft speed, the operating setpoints of the components are not uniquely defined due to the degrees of freedom (DoFs) in the system. For example, the propulsive demand can be met by infinite combinations of main engine and induction motor power output levels. The number of indefinite variables in the model description corresponds to the DoF in the system and each DoF correspond to an additional system control input.
- Each component introduces operating constraints which should be explicitly expressed.
- Finally, since the SoC of the battery must be within its operating constraints, it should be introduced to the system as a state variable.
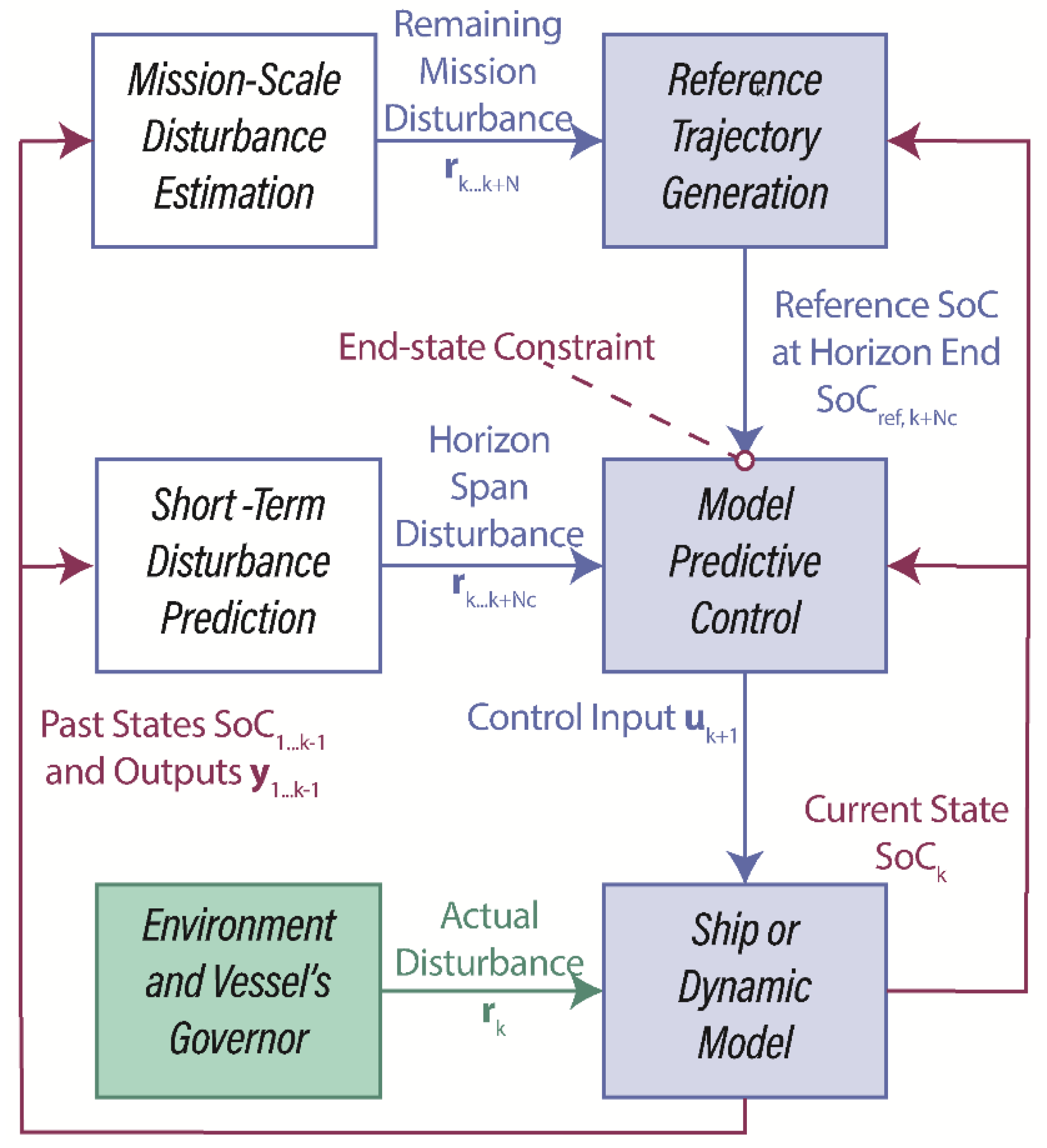
2.2. Energy Management Strategy Framework
3. Results
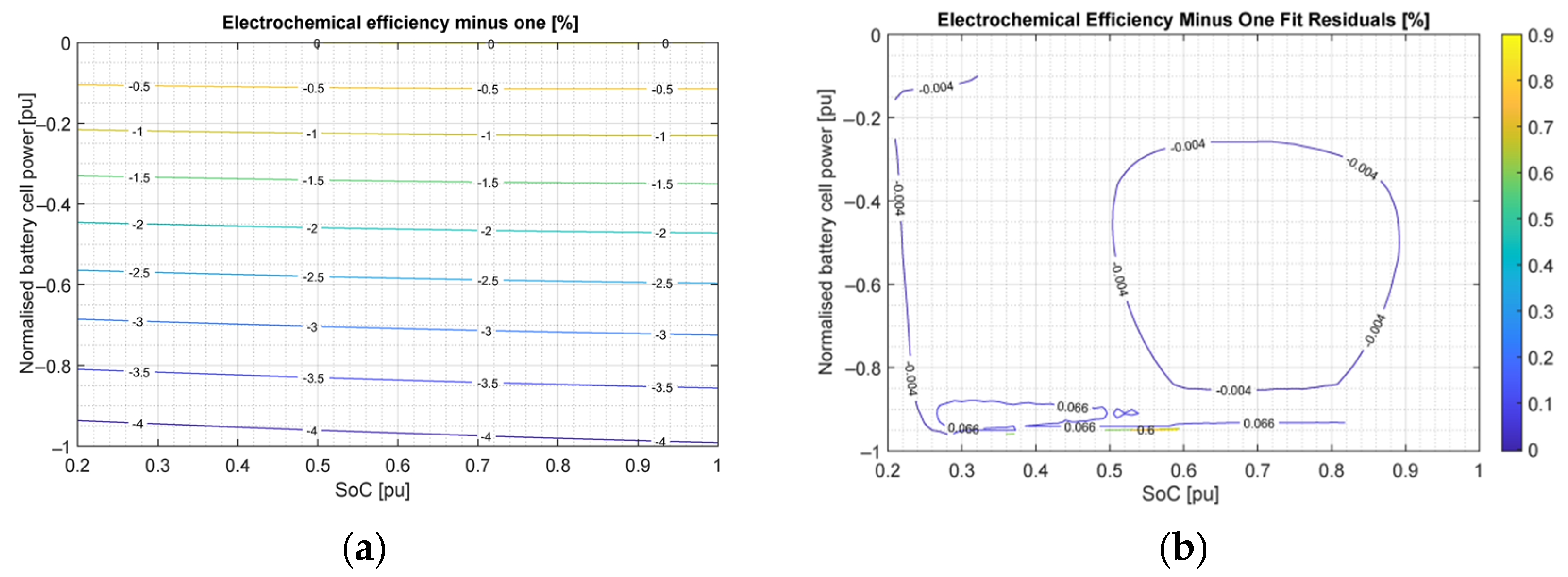
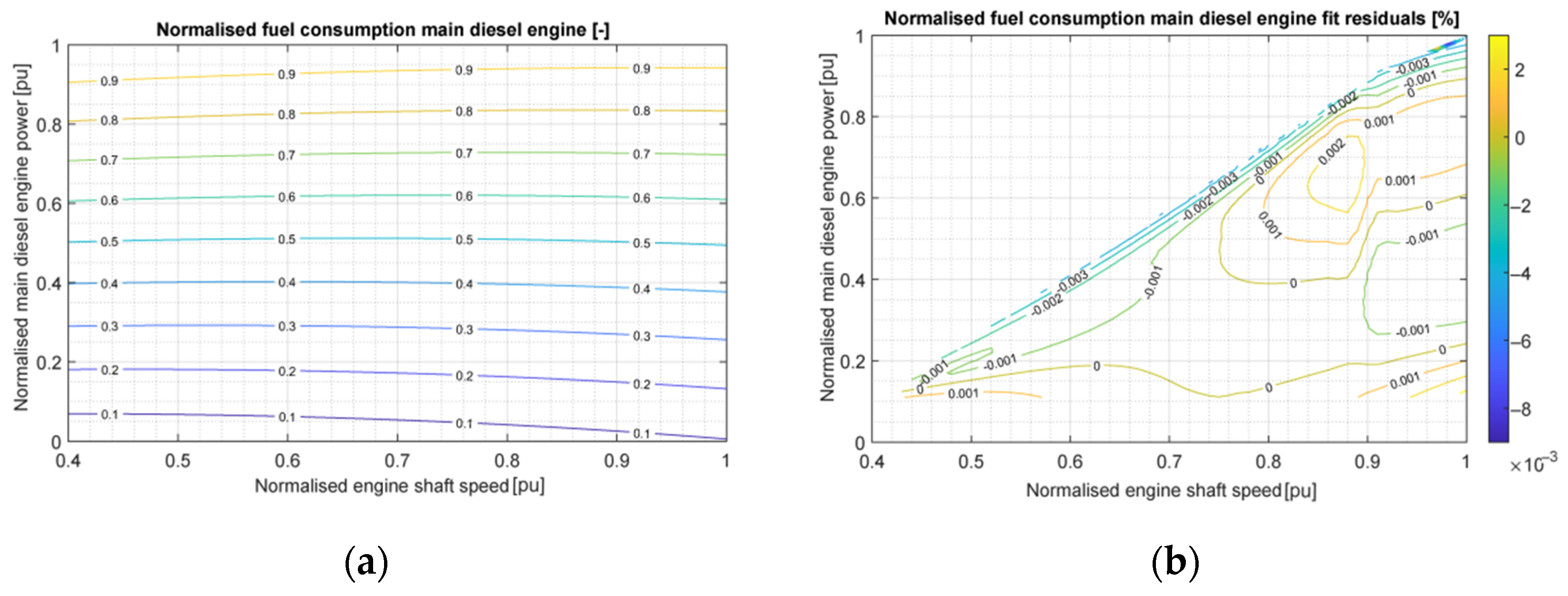
3.1. Model Description Tuning and Verification
3.2. Verification of the Reference Trajectory Generator Module
3.3. Verification of the Model Predictive Control Module
- The state is the battery SoCk and it is sampled from the Simulink® model of the propulsive plant at each time step tk and used as the initial SoC for the OCP.
- The disturbances to the system are the shaft speed, propulsive power demand, and hotel power demand. The predicted values for each disturbance and for the scope of each horizon are provided to the OCP at each time step tk.
- The SoCMPC at the end of the horizon tk + NcΔt is constrained by the SoCref of the global solution at the same time-step. This is the ESC of Equation (32).
- The DP solver is utilised to provide the solution to the OCP above for the control horizon. The control inputs to the system are the normalized battery current In and electric machine torque Mn. The resulting control input vector for the next time step uk + 1 is fed to the system and the control input vectors for the rest of the time-steps, uk + 2…Nc, are discarded.
- At the next time-step the MPC module samples the next SoC and iterates the procedure.
3.4. Validation of the Model Predictive Control Framework
- The first online DP controller has perfect information about the disturbances, including the change at the IBP. This means that it is the optimal controller and calculates the control inputs for the telegraph trajectory spliced at the barrier point.
- The second online DP controller solves for the initial prediction until the IBP, where it recalculates the control inputs for the actual trajectory.
- The MPC framework’s RTG module is updated with the actual trajectory at the update point, which is before the IBP.
4. Discussion
- The MPC framework shows close-to-optimal performance and satisfies all operating constraints, including the integral constraints on the SoC, for all tested loading sequences and modes. A time interval of 600 s for both the prediction and the control horizon has been found to be sufficient for achieving such performance.
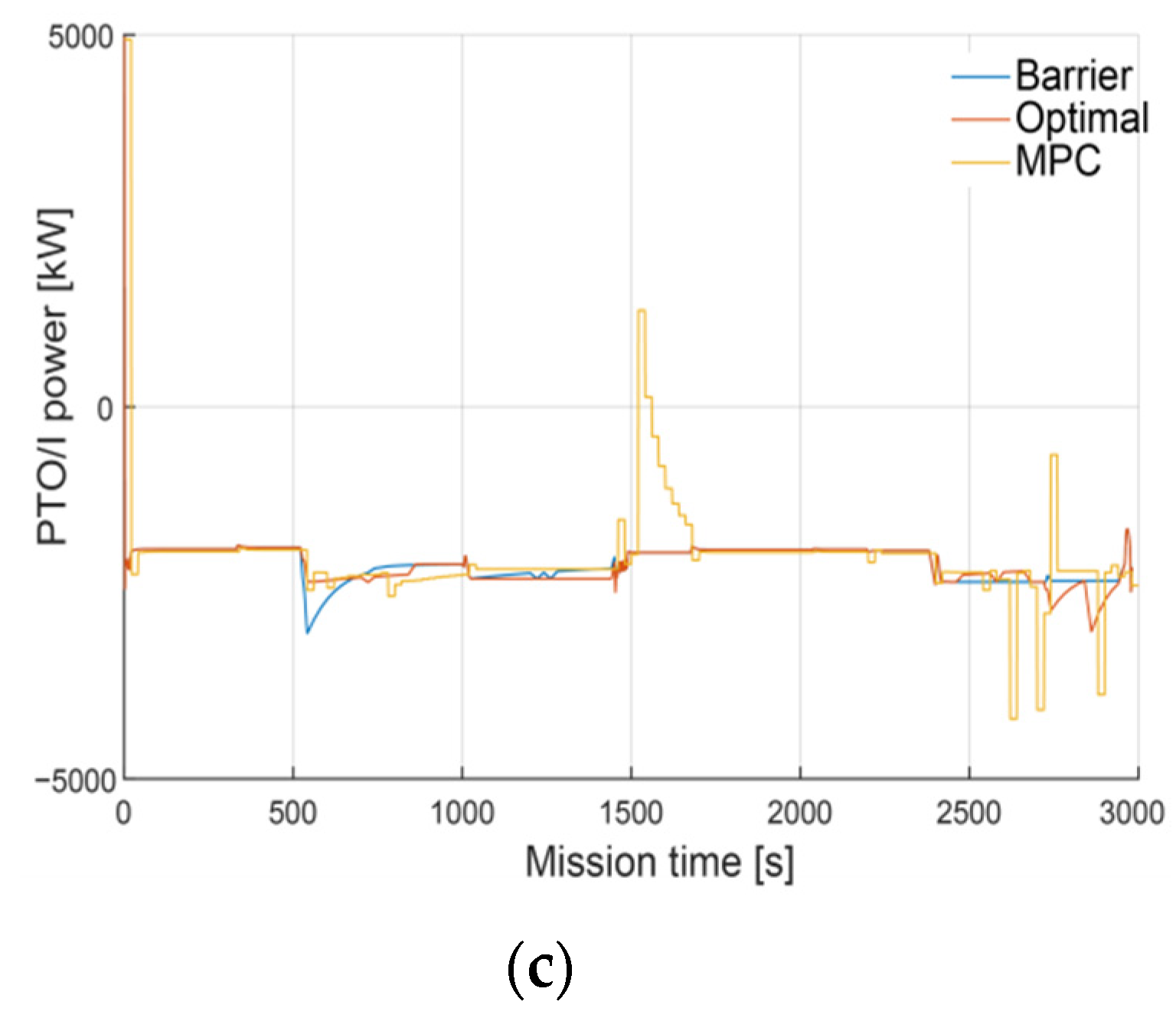
- In CD mode the consumption reduction due to utilisation of mission-scale predictions can be substantial. Compared to the fully-informed, optimal controller, the MPC framework selects higher power setpoints only after it receives the information for the updated profile, both in the standard and the parametric study (Figure 9a and Figure 10b). This means that the primary factor for reducing the fuel consumed is the use of all the energy in the battery. This in turn offsets the consumption of the main engines and the generator to lower values. A reduction of up to 3.5% was achieved for this specific case study in CD mode and under specific loading sequences. In CS mode, savings due to unused charge avoidance are not possible.
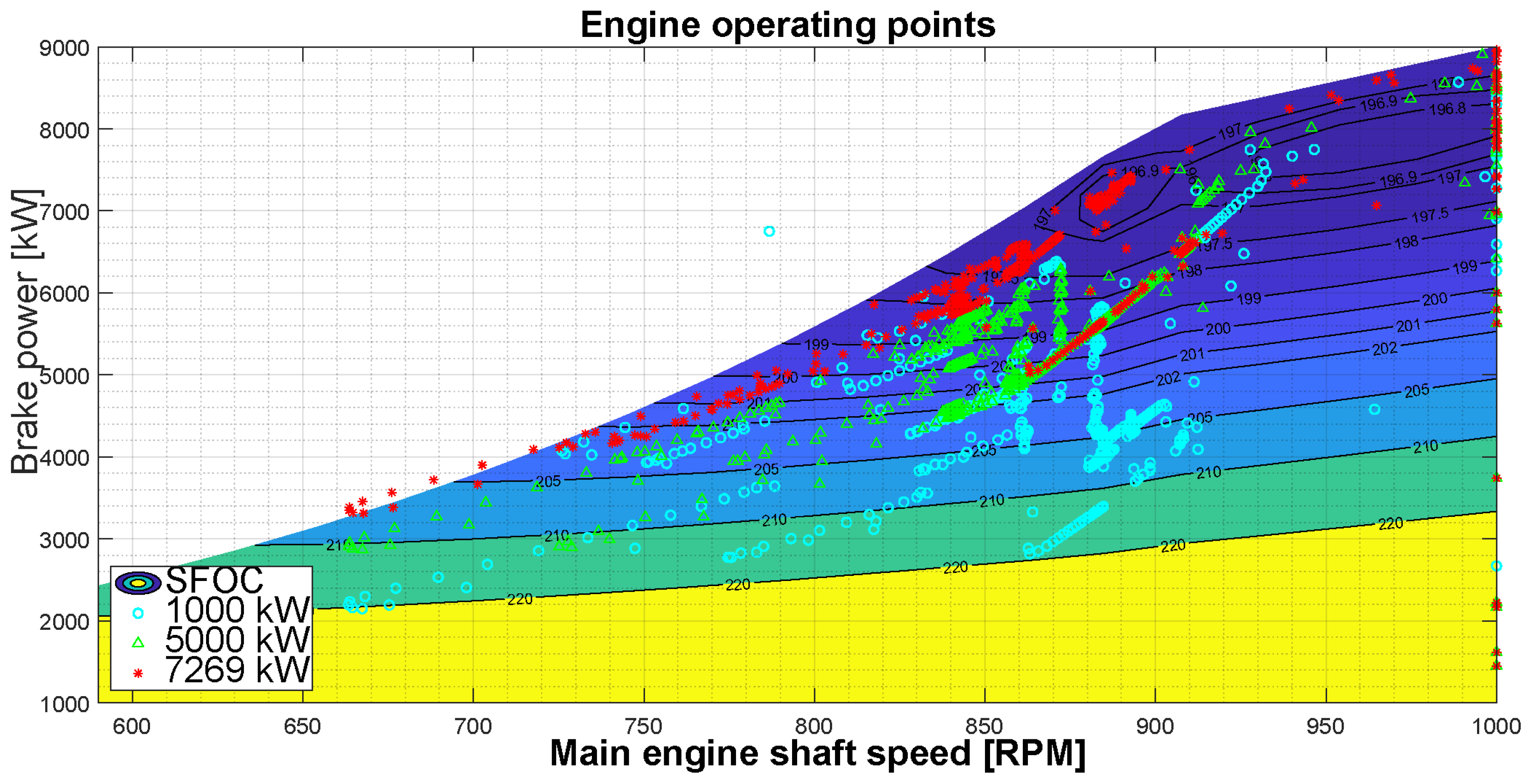
- When the induction motors are active, the reduction in fuel consumption due to mission scale information is possible (0.4% reduction observed). The control inputs from the MPC framework yield fuel-efficient operating points in the envelope of the main engine. This is achieved by storing energy, via the induction motors, to the battery plant and using it at a later time, in such a way that the fuel consumed is minimised.
- For several loading sequences, the two benchmark solutions coincide partially or completely. In such cases, few solutions that satisfy all of the OCP’s constraints exist, leading to a solution space where fuel consumption reduction due to use of mission scale information is insignificant. In the simulations for the MPC framework, the DP solvers in the RTG and MPC modules of the framework have been shown to be effective in finding these feasible solutions, adding to the controller’s robustness.
- The computational load allows for an embedded controller. The controller framework implemented in Simulink®, simulated together with the dynamic model, require less time to compute than the mission on a laptop computer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| PPTO/I,loss,nom | 1.9050 × 105 | W |
| Tnom | 2.2037 × 105 | Nm |
| Nnom | 2.1667 | s−1 |
| mf,DE,nom | 0.4950 | kg/s |
| PDE,nom | 9 × 107 | W |
| NDE,nom | 16.667 | s−1 |
| mf,DG,nom | 0.1481 | kg/s |
| Pf,gen,nom | 2.6923 × 106 | W |
| kp | 2 | |
| nser | 34 | |
| npar | 102 | |
| Pcell,max | 1.8417 × 103 | W |
| Qcell,0 | 48.06 | As |
| Inom,los | 206.670 | A |
| Ibat,AC,nom | 10287 | A |
| pf | 0.8 | |
| Vline | 440 | V |
| iGB,B | 7.692 | |
| iGB,drive | 1 | |
| Mn,min | 0.3 | |
| PDE,n,min | 0.45 | |
| SoCmin | 0.2 | |
| PDG,n,min | 0.4 |
| Parameter | Value |
|---|---|
| CD | Charge Depleting |
| CS | Charge Sustaining |
| DAE | Differential and Algebraic Equations |
| DoF | Degrees of Freedom |
| DP | Dynamic Programming |
| ECMS | Equivalent Consumption Minimisation Strategy |
| EMS | Energy Management Strategy |
| ESC | End-State Constraint |
| ESS | Energy Storage System |
| IBP | Information Barrier Point |
| IC | Internal Combustion |
| MPC | Model Prodictive Control |
| OCP | Optimal Control Problem |
| PTO/I | Power take-off/in |
| RTG | Reference Trajectory Generation |
| SFOC | Specific Fuel Oil Consumption |
| SoC | State of Charge |
References
- International Maritime Organization–Fourth IMO GHG Study 2020 Executive-Summary. Available online: https://wwwcdn.imo.org/localresources/en/OurWork/Environment/Documents/Fourth%20IMO%20GHG%20Study%202020%20Executive-Summary.pdf (accessed on 21 July 2021).
- Sui, C.; de Vos, P.; Stapersma, D.; Visser, K.; Ding, Y. Fuel consumption and emissions of ocean-going cargo ship with hybrid propulsion and different fuels over voyage. J. Mar. Sci. Eng. 2020, 8, 588. [Google Scholar] [CrossRef]
- Hwang, S.; Jeong, B.; Jung, K.; Kim, M.; Zhou, P. Life cycle assessment of LNG fueled vessel in domestic services. J. Mar. Sci. Eng. 2019, 7, 359. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.; Roh, G.; Kim, W.; Chun, K. A preliminary study on an alternative ship propulsion system fueled by ammonia: Environmental and economic assessments. J. Mar. Sci. Eng. 2020, 8, 183. [Google Scholar] [CrossRef] [Green Version]
- Lamas Galdo, M.I.; Castro-Santos, L.; Rodriguez Vidal, C.G. Numerical analysis of NOx reduction using ammonia injection and comparison with water injection. J. Mar. Sci. Eng. 2020, 8, 109. [Google Scholar] [CrossRef] [Green Version]
- Witkowski, K. Research of the effectiveness of selected methods of reducing toxic exhaust emissions of marine diesel engines. J. Mar. Sci. Eng. 2020, 8, 452. [Google Scholar] [CrossRef]
- Puškár, M.; Kopas, M.; Sabadka, D.; Kliment, M.; Šoltésová, M. Reduction of the gaseous emissions in the marine diesel engine using biodiesel mixtures. J. Mar. Sci. Eng. 2020, 8, 330. [Google Scholar] [CrossRef]
- Lashway, C.R.; Elsayed, A.T.; Mohammed, O.A. Hybrid energy storage management in ship power systems with multiple pulsed loads. Electr. Power Syst. Res. 2016, 141, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Georgescu, I.; Godjevac, M.; Visser, K. Efficiency constraints of energy storage for on-board power systems. Ocean. Eng. 2018, 162, 239–247. [Google Scholar] [CrossRef]
- Bloomberg-Batteries for Electric Cars Speed toward a Tipping Point. Available online: https://www.bloomberg.com/news/articles/2020-12-16/electric-cars-are-about-to-be-as-cheap-as-gas-powered-models (accessed on 31 January 2021).
- Berckmans, G.; Messagie, M.; Smekens, J.; Omar, N.; Vanhaverbeke, L.; Van Mierlo, J. Cost projection of state of the art lithium-ion batteries for electric vehicles up to 2030. Energies 2017, 10, 1314. [Google Scholar] [CrossRef] [Green Version]
- Zahedi, B.; Norum, L.E.; Ludvigsen, K.B. Optimized efficiency of all-electric ships by dc hybrid power systems. J. Power Sources 2014, 255, 341–354. [Google Scholar] [CrossRef]
- Godjevac, M.; Mestemaker, B.T.; Visser, K.; Lyu, Z.; Boonen, E.J.; van der Veen, F.; Malikouti, C. Electrical energy storage for dynamic positiong operations: Investigation of three application case. In Proceedings of the 2017 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 14–17 August 2017; pp. 182–186. [Google Scholar]
- Dedes, E.K.; Hudson, D.A.; Turnock, S.R. Investigation of Diesel Hybrid systems for fuel oil reduction in slow speed ocean going ships. Energy 2016, 114, 444–456. [Google Scholar] [CrossRef] [Green Version]
- Kalikatzarakis, M.; Geertsma, R.D.; Boonen, E.J.; Visser, K.; Negenborn, R.R. Ship energy management for hybrid propulsion and power supply with shore charging. Control Eng. Pract. 2018, 76, 133–154. [Google Scholar] [CrossRef]
- Mauro, F.; Ghigliossi, E.; Bucci, V.; Marinó, A. Design of hybrid-electric megayachts: The impact of operative profile and smart berthing infrastructures. J. Mar. Sci. Eng. 2021, 9, 186. [Google Scholar] [CrossRef]
- Papanikolaou, A.D. Review of the Design and Technology Challenges of Zero-Emission, Battery-Driven Fast Marine Vehicles. J. Mar. Sci. Eng. 2020, 8, 941. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Xing-Kaeding, Y.; Strobel, J.; Kanellopoulou, A.; Zaraphonitis, G.; Tolo, E. Numerical and Experimental Optimization Study on a Fast, Zero Emission Catamaran. J. Mar. Sci. Eng. 2020, 8, 657. [Google Scholar] [CrossRef]
- Bassam, A.M.; Phillips, A.B.; Turnock, S.R.; Wilson, P.A. Development of a multi-scheme energy management strategy for a hybrid fuel cell driven passenger ship. Int. J. Hydrog. Energy 2017, 42, 623–635. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Han, J.; Peng, D.; Wang, T.; Tang, T.; Charpentier, J.-F. Fuzzy logic based energy management strategy for a fuel cell/battery/ultra-capacitor hybrid ship. In Proceedings of the 2014 First International Conference on Green Energy ICGE 2014, Sfax, Tunisia, 25–27 March 2014; pp. 107–112. [Google Scholar]
- Jeong, B.; Jeon, H.; Kim, S.; Kim, J.; Zhou, P. Evaluation of the lifecycle environmental benefits of full battery powered ships: Comparative analysis of marine diesel and electricity. J. Mar. Sci. Eng. 2020, 8, 580. [Google Scholar] [CrossRef]
- Sciarretta, A.; Guzzella, L. Control of hybrid electric vehicles. IEEE Control Syst. Mag. 2007, 27, 60–70. [Google Scholar]
- Yuan, Y.; Zhang, T.; Shen, B.; Yan, X.; Long, T. A fuzzy logic energy management strategy for a photovoltaic/diesel/battery hybrid ship based on experimental database. Energies 2018, 11, 2211. [Google Scholar] [CrossRef] [Green Version]
- Yuan, L.C.; Tjahjowidodo, T.; Lee, G.S.; Chan, R.; Ådnanes, A.K. Equivalent consumption minimization strategy for hybrid all-electric tugboats to optimize fuel savings. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6803–6808. [Google Scholar]
- Vu, T.L.; Ayu, A.A.; Dhupia, J.S.; Kennedy, L.; Ådnanes, A.K. Power management for electric tugboats through operating load estimation. IEEE Trans. Control Syst. Technol. 2015, 23, 2375–2382. [Google Scholar] [CrossRef]
- Xiang, W.; Yin, J.; Lim, G. An ant colony optimization approach for solving an operating room surgery scheduling problem. Comput. Ind. Eng. 2015, 85, 335–345. [Google Scholar] [CrossRef]
- Sciberras, E.A.; Zahawi, B.; Atkinson, D.J.; Breijs, A.; van Vugt, J.H. Managing shipboard energy: A stochastic approach special issue on marine systems electrification. IEEE Trans. Transp. Electrif. 2016, 2, 538–546. [Google Scholar] [CrossRef]
- Yan, F.; Wang, J.; Huang, K. Hybrid electric vehicle model predictive control torque-split strategy incorporating engine transient characteristics. IEEE Trans. Veh. Technol. 2012, 61, 2458–2467. [Google Scholar] [CrossRef]
- Bordons, C.; Garcia-Torres, F.; Ridao, M.A. Microgrid as a New Paradigm for the Electrical System. In Model Predictive Control of Microgrids; Grimble, M.J., Ferrara, A., Eds.; Advances in Industrial Control; Springer Nature: Cham, Switzerland, 2020; pp. 1–11. [Google Scholar]
- Serrao, L.; Onori, S.; Rizzoni, G. A comparative analysis of energy management strategies for hybrid electric vehicles. J. Dyn. Syst. Meas. Control 2011, 133, 031012. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Ümit, Ö.; Tulpule, P.; Marano, V. Real-time energy management and sensitivity study for hybrid electric vehicles. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 2113–2118. [Google Scholar]
- Finkeldei, E.; Back, M. Implementing an mpc algorithm in a vehicle with a hybrid powertrain using telematics as a sensor for powertrain control. IFAC Proc. Vol. 2004, 37, 433–438. [Google Scholar] [CrossRef]
- Sun, C.; Moura, S.J.; Hu, X.; Hedrick, J.K.; Sun, F. Dynamic traffic feedback data enabled energy management in plug-in hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2014, 23, 1075–1086. [Google Scholar]
- Hou, J.; Sun, J.; Hofmann, H. Mitigating power fluctuations in electrical ship propulsion using model predictive control with hybrid energy storage system. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4366–4371. [Google Scholar]
- Haseltalab, A.; Negenborn, R.R.; Lodewijks, G. Multi-level predictive control for energy management of hybrid ships in the presence of uncertainty and environmental disturbances. IFAC-PapersOnLine 2016, 49, 90–95. [Google Scholar] [CrossRef]
- Papalambrou, G.; Samokhin, S.; Topaloglou, S.; Planakis, N.; Kyrtatos, N.; Zenger, K. Model predictive control for hybrid diesel-electric marine propulsion. IFAC-PapersOnLine 2017, 50, 11064–11069. [Google Scholar] [CrossRef]
- Huotari, J.; Ritari, A.; Vepsäläinen, J.; Tammi, K. Hybrid ship unit commitment with demand prediction and model predictive control. Energies 2020, 13, 4748. [Google Scholar] [CrossRef]
- Geertsma, R. Autonomous Control for Adaptive Ships with Hybrid Propulsion and Power Generation. Ph.D. Thesis, Technical University of Delft, Delft, The Netherlands, 2019. [Google Scholar]
- Wu, M.; Stefanakos, C.; Gao, Z. Multi-Step-Ahead Forecasting of Wave Conditions Based on a Physics-Based Machine Learning (PBML) Model for Marine Operations. J. Mar. Sci. Eng. 2020, 8, 992. [Google Scholar] [CrossRef]
- Pennino, S.; Gaglione, S.; Innac, A.; Piscopo, V.; Scamardella, A. Development of a new ship adaptive weather routing model based on seakeeping analysis and optimization. J. Mar. Sci. Eng. 2020, 8, 270. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Adaptive Optimal Supervisory Control Methods. In Hybrid Electric Vehicles: Energy Management Strategies; Basar, T., Bicchi, A., Krstic, M., Eds.; Springer: London, UK, 2016; pp. 79–88. [Google Scholar]
- Guzzella, L.; Sciarretta, A. Electric and Hybrid-Electric Propulsion Systems. In Vehicle Propulsion Systems, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 10–130. [Google Scholar]
- Sundstrom, O.; Guzzella, L. A generic dynamic programming Matlab function. In Proceedings of the 2009 IEEE control applications (CCA) & intelligent control (ISIC), St. Petersburg, Russia, 8–10 July 2009; pp. 1625–1630. [Google Scholar]
- Murgovski, N.; Johannesson, L.; Sjöberg, J.; Egardt, B. Component sizing of a plug-in hybrid electric powertrain via convex optimization. Mechatronics 2012, 22, 106–120. [Google Scholar] [CrossRef] [Green Version]
- Faulwasser, T.; Grüne, L.; Müller, M.A. Economic nonlinear model predictive control. Now Found. Trends 2018, 5, 1–98. [Google Scholar]
- Hovgaard, T.G.; Edlund, K.; Jørgensen, J.B. The potential of economic MPC for power management. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 7533–7538. [Google Scholar]
- Ferramosca, A.; Rawlings, J.B.; Limón, D.; Camacho, E.F. Economic MPC for a changing economic criterion. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 6131–6136. [Google Scholar]
- Rawlings, J.B.; Bonné, D.; Jorgensen, J.B.; Venkat, A.N.; Jorgensen, S.B. Unreachable setpoints in model predictive control. IEEE Trans. Autom. Control 2008, 53, 2209–2215. [Google Scholar] [CrossRef] [Green Version]
- Vu, T.L.; Dhupia, J.S.; Ayu, A.A.; Kennedy, L.; Adnanes, A.K. Optimal power management for electric tugboats with unknown load demand. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1578–1583. [Google Scholar]
- Nijhuis, M.; Gibescu, M.; Cobben, J.F. Bottom-up Markov Chain Monte Carlo approach for scenario based residential load modelling with publicly available data. Energy Build. 2016, 112, 121–129. [Google Scholar] [CrossRef] [Green Version]









| Profile/Telegraph Position | Fuel Consumption [kg] | Difference [%] |
|---|---|---|
| Base | 1974.3 | |
| −10% | 1908.1 | −3.35 |
| +10% | 2085.5 | +5.63 |
| 50% PDE,nom | 2055.1 | +4.09 |
| 50% Tnom | 2056.7 | +4.17 |
| Profile 1 | Profile 2 | |||
|---|---|---|---|---|
| Fuel Consumption [kg] | Difference [%] | Fuel Consumption [kg] | Difference [%] | |
| Optimal | 1787 (1961) | −4.85 (−3.44) | 1758 (1949) | 0.00 (−0.20) |
| Barrier | 1878 (2031) | 1758 (1953) | ||
| MPC | 1811 | −3.57 | 1798 | +2.28 |
| Fuel Consumption [kg] | |||
|---|---|---|---|
| 600 s | 1200 s | 1800 s | |
| Optimal | 1787 | 1787 | 1787 |
| Barrier | 1878 | 1878 | 1878 |
| MPC | 1811 (−3.56%) | 1813.4 (−3.44%) | 1842 (−1.92%) |
| Fuel Consumption [kg] | |||
|---|---|---|---|
| 1 MW | 5 MW | 7.27 MW | |
| Optimal | 1787 | 2442 | 2825 |
| Barrier | 1878 | 2447 | 2839 |
| MPC | 1811 (−3.56%) | 2448 (+0.04%) | 2826 (−0.44%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonopoulos, S.; Visser, K.; Kalikatzarakis, M.; Reppa, V. MPC Framework for the Energy Management of Hybrid Ships with an Energy Storage System. J. Mar. Sci. Eng. 2021, 9, 993. https://doi.org/10.3390/jmse9090993
Antonopoulos S, Visser K, Kalikatzarakis M, Reppa V. MPC Framework for the Energy Management of Hybrid Ships with an Energy Storage System. Journal of Marine Science and Engineering. 2021; 9(9):993. https://doi.org/10.3390/jmse9090993
Chicago/Turabian StyleAntonopoulos, Spyros, Klaas Visser, Miltiadis Kalikatzarakis, and Vasso Reppa. 2021. "MPC Framework for the Energy Management of Hybrid Ships with an Energy Storage System" Journal of Marine Science and Engineering 9, no. 9: 993. https://doi.org/10.3390/jmse9090993
APA StyleAntonopoulos, S., Visser, K., Kalikatzarakis, M., & Reppa, V. (2021). MPC Framework for the Energy Management of Hybrid Ships with an Energy Storage System. Journal of Marine Science and Engineering, 9(9), 993. https://doi.org/10.3390/jmse9090993