
Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV


Abstract
:1. Introduction
2. Hydrodynamic Model and Simplification
2.1. Assumptions
- ROVs are retained in only four degrees of freedom: sway, surge, heave, and yaw;
- The floating center of ROVs is on the same line as the center of mass;
- The nonlinear response of the thruster is not considered;
- The unmentioned disturbances are not considered in the dynamical equations.
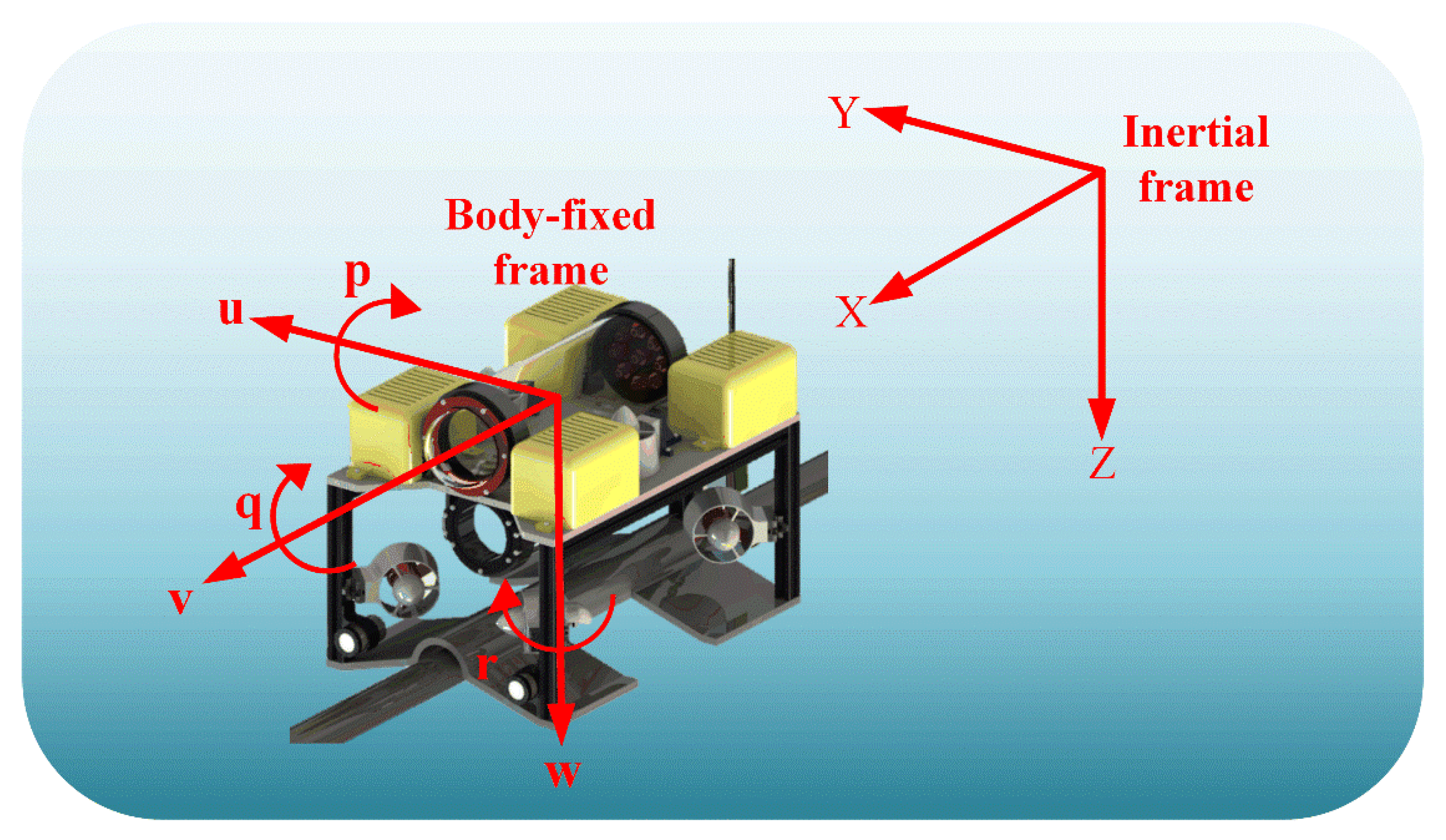
2.2. Kinematic Model
2.3. Hydrodynamic Model
2.4. Ocean Currents
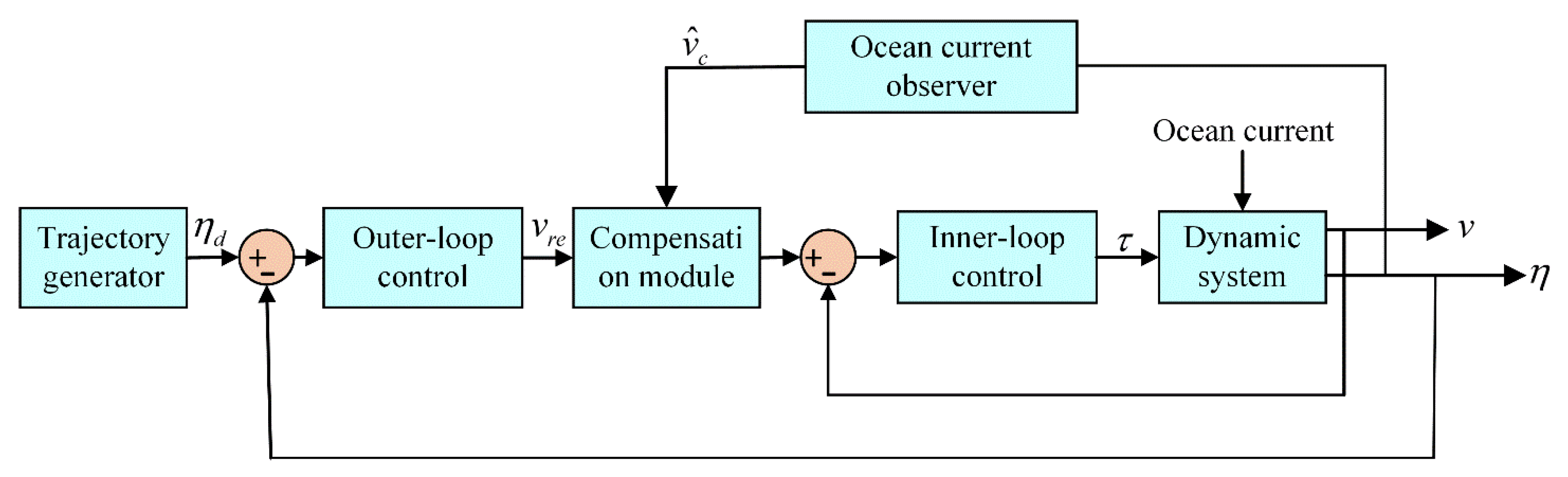
3. Controller Design
3.1. Sliding Mode Control
3.2. Outer-Loop (Position Loop) Controller
3.3. Inner-Loop (Velocity Loop) Controller
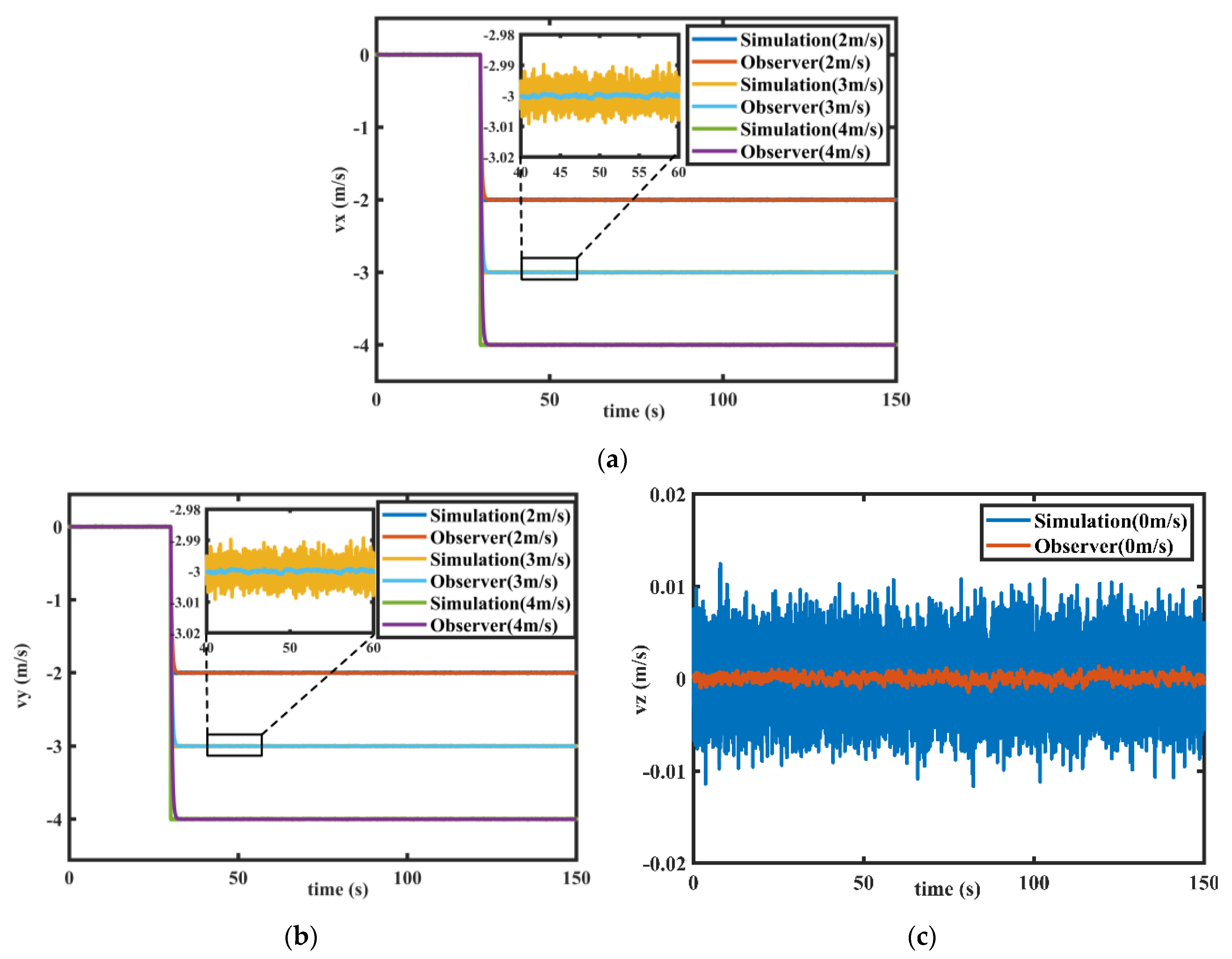
3.4. Ocean Current Observer
4. Simulation Results and Discussion
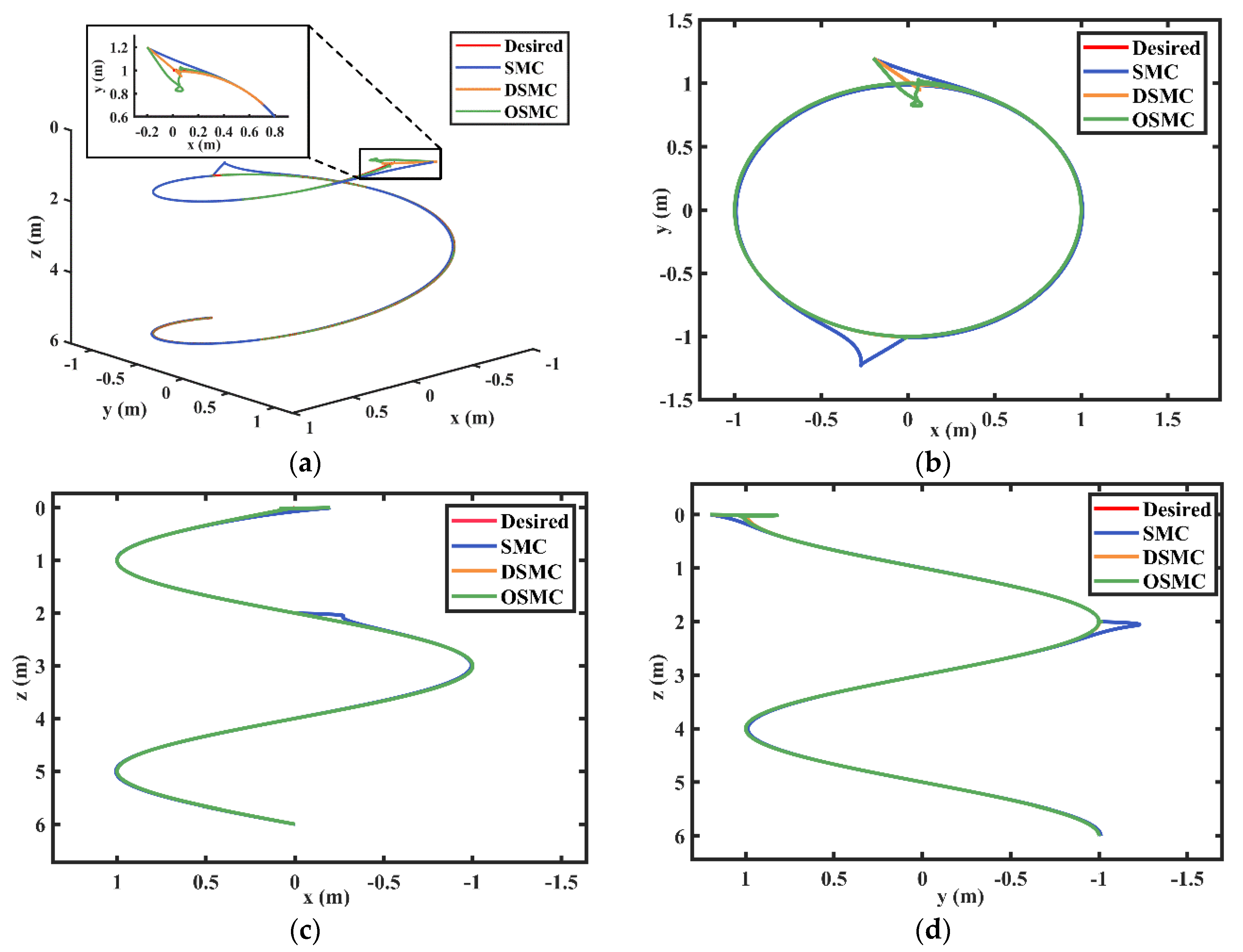
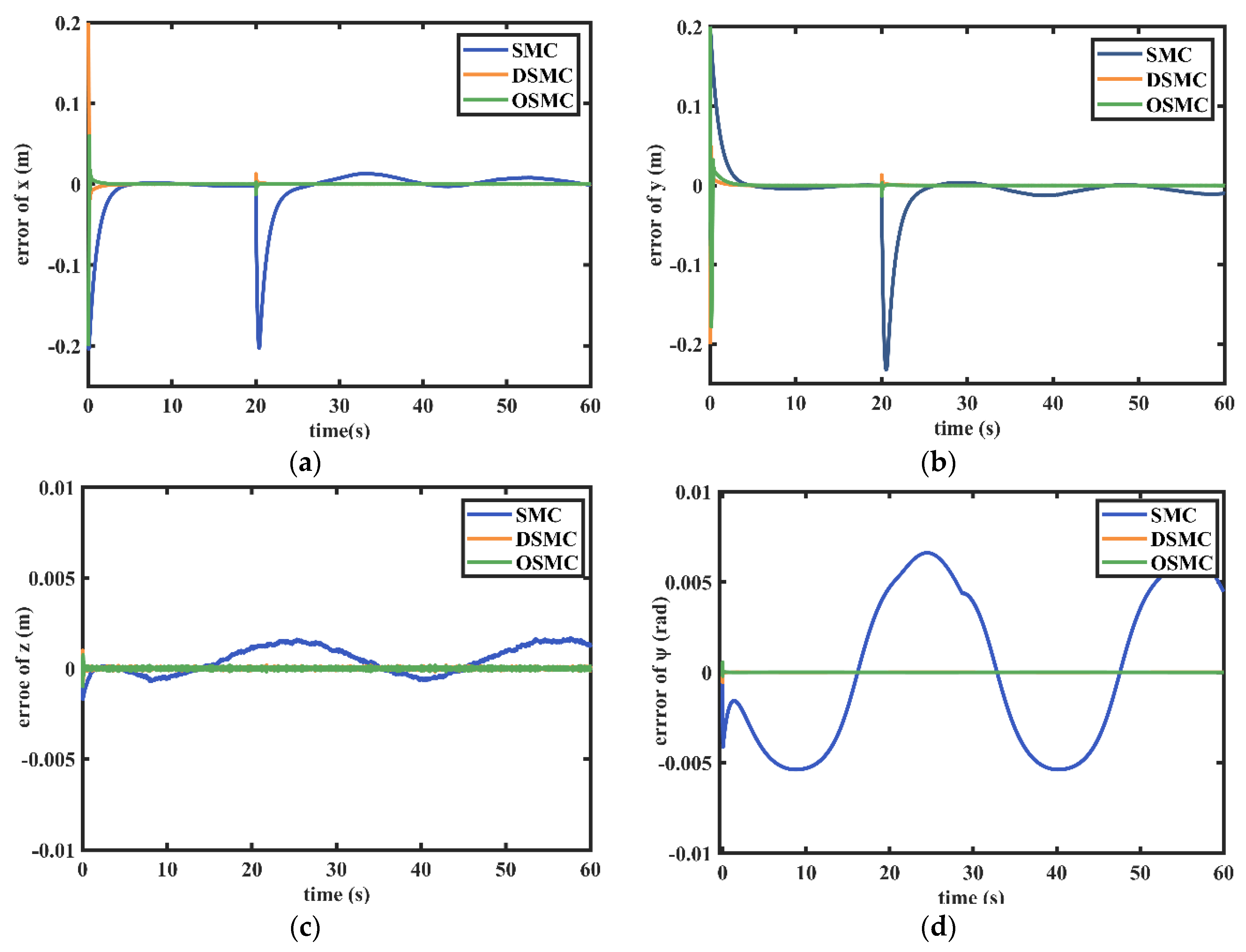
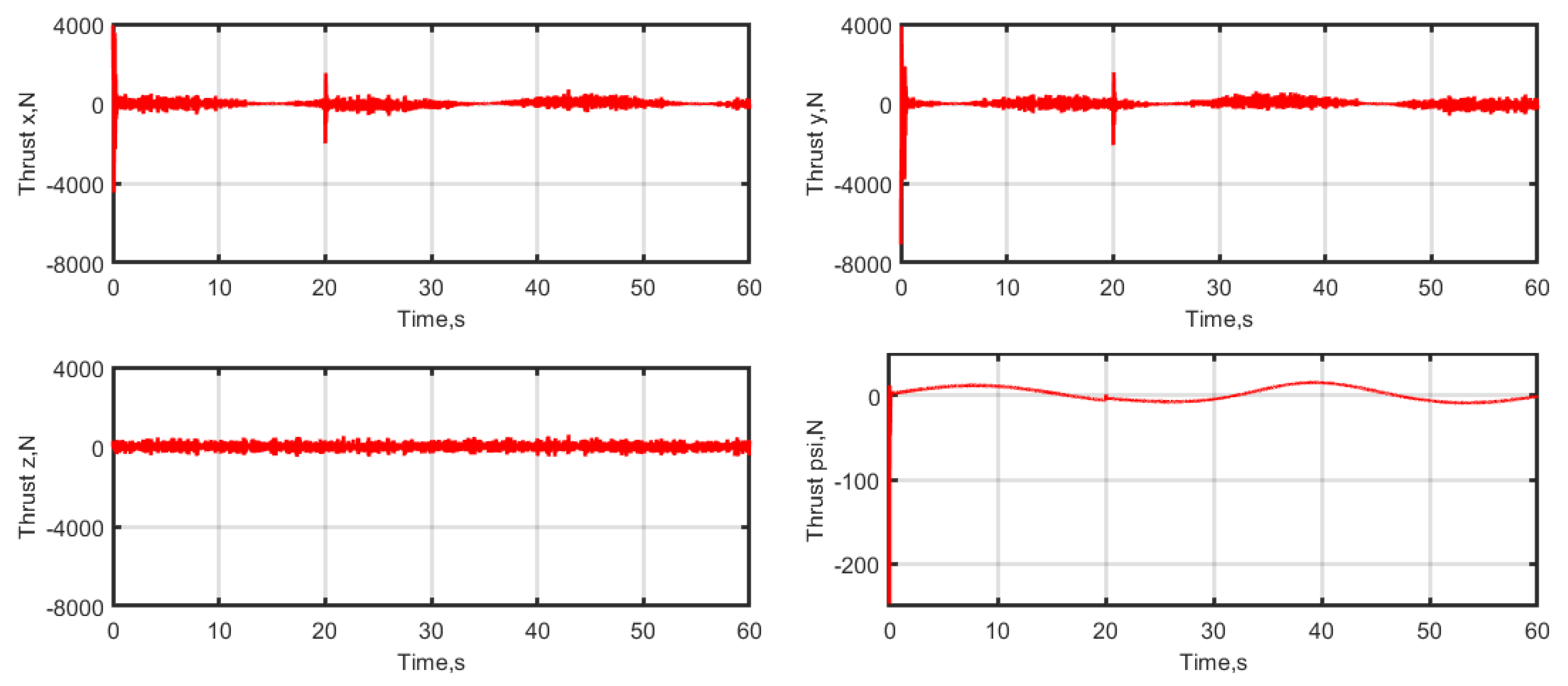
4.1. Controller Performance Comparison
4.2. Controller Robustness
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Yuh, J. Design and Control of Autonomous Underwater Robots: A Survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Zhang, J.Z.; Wei, Y.J.; Bi, F.Y.; Cao, W. Position-tracking control of underactuated autonomous underwater vehicles in the presence of unknown ocean currents. IET Control Theory Appl. 2010, 4, 2369–2380. [Google Scholar] [CrossRef]
- Alonge, F.; D’Ippolito, F.; Raimondi, F.M. Trajectory tracking of underactuated underwater vehicles. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 4421–4426. [Google Scholar] [CrossRef]
- Beccario, C. Ocean Currents Data in the OSCAR Archive. Available online: https://earth.nullschool.net/ (accessed on 28 November 2020).
- Shome, S.N.; Nandy, S.; Pal, D.; Das, S.K.; Vadali, S.R.K.; Basu, J.; Ghosh, S. Development of Modular Shallow Water AUV: Issues & Trial Results. J. Inst. Eng. India Ser. C 2012, 93, 217–228. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef] [Green Version]
- Chu, Z.; Xiang, X.; Zhu, D.; Luo, C.; Xie, D. Adaptive trajectory tracking control for remotely operated vehicles considering thruster dynamics and saturation constraints. Isa Trans. 2020, 100, 28–37. [Google Scholar] [CrossRef] [PubMed]
- Maalouf, D.; Chemori, A.; Creuze, V. L1 Adaptive depth and pitch control of an underwater vehicle with real-time experiments. Ocean Eng. 2015, 98, 66–77. [Google Scholar] [CrossRef] [Green Version]
- Do, K.D. Robust adaptive tracking control of underactuated ODINs under stochastic sea loads. Robot. Auton. Syst. 2015, 72, 152–163. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, M.; Wilson, P.A.; Liu, X. Adaptive neural network-based backstepping fault tolerant control for underwater vehicles with thruster fault. Ocean Eng. 2015, 110, 15–24. [Google Scholar] [CrossRef]
- Repoulias, F.; Papadopoulos, E. Planar trajectory planning and tracking control design for underactuated AUVs. Ocean Eng. 2007, 34, 1650–1667. [Google Scholar] [CrossRef]
- Londhe, P.S.; Patre, B.M. Adaptive fuzzy sliding mode control for robust trajectory tracking control of an autonomous underwater vehicle. Intell. Serv. Robot. 2019, 12, 87–102. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Fonseca-Navarro, F.; Aizpuru-Zinkunegi, J.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cruz-Ledesma, J.A. Neuro-Sliding Control for Underwater ROV’s Subject to Unknown Disturbances. Sensors 2019, 19, 2943. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, Y.; Yu, S. Sliding mode tracking control of autonomous underwater vehicles with the effect of quantization. Ocean Eng. 2018, 151, 322–328. [Google Scholar] [CrossRef]
- Xu, J.; Wang, M.; Qiao, L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Eng. 2015, 105, 54–63. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Mu, W.; Xing, S. Control strategy of low energy consumption rising and diving motion based on buoyancy actuation system. J. Huazhong Univ. Sci. Tech. Nat. Sci. Ed. 2019, 47, 57–62. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Lapierre, L.; Zhang, Q. Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean Eng. 2017, 146, 457–467. [Google Scholar] [CrossRef] [Green Version]
- Shojaei, K. Three-dimensional neural network tracking control of a moving target by underactuated autonomous underwater vehicles. Neural Comput. Appl. 2019, 31, 509–521. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, S.; Shi, L.; Pan, S.; He, Y. The application of PID control in motion control of the spherical amphibious robot. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1901–1906. [Google Scholar] [CrossRef]
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.; Thang, Q.; Duc, T.; Hoang, Q.; Le, T. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Nhu Ngoc Thanh, H.L.; Vu, M.T.; Nguyen, N.P.; Mung, N.X.; Hong, S.K. Finite-Time Stability of MIMO Nonlinear Systems Based on Robust Adaptive Sliding Control: Methodology and Application to Stabilize Chaotic Motions. IEEE Access 2021, 9, 21759–21768. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, M.T. Design of a Non-Singular Adaptive Integral-Type Finite Time Tracking Control for Nonlinear Systems with External Disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Refsnes, J.E.; Sorensen, A.J.; Pettersen, K.Y. Model-Based Output Feedback Control of Slender-Body Underactuated AUVs: Theory and Experiments. IEEE T. Contr. Syst. T. 2008, 16, 930–946. [Google Scholar] [CrossRef]
- Haghi, P.; Naraghi, M.; Vanini, S.A.S. Adaptive Position and Attitude Tracking of an AUV in the Presence of Ocean Current Disturbances. In Proceedings of the 16th IEEE International Conference on Control Applications, Singapore, 1–3 October 2007; pp. 741–746. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE T. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Lamraoui, H.C.; Qidan, Z. Path following control of fully-actuated autonomous underwater vehicle in presence of fast-varying disturbances. Appl. Ocean Res. 2019, 86, 40–46. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Jakovljević, B.; Lino, P.; Maione, G. Control of double-loop permanent magnet synchronous motor drives by optimized fractional and distributed-order PID controllers. Eur. J. Control 2021, 58, 232–244. [Google Scholar] [CrossRef]
- Zhong, B.; Jin, Z.; Zhu, J.; Wang, Z.; Sun, L. Double closed-loop control of a trans-scale precision positioning stage based on the inertial stick-slip driving. Sens. Actuators A Phys. 2019, 297, 111547. [Google Scholar] [CrossRef]
- Xue, J.; Jiao, X.; Sun, Z. ESO-Based Double Closed-loop Servo Control for Automobile Electronic Throttle. IFAC-Pap. 2018, 51, 979–983. [Google Scholar] [CrossRef]
- Mu, W.; Zou, Z.; Liu, G.; Yang, Y.; Shi, L. Depth Control Method of Profiling Float Based on an Improved Double PD Controller. IEEE Access 2019, 7, 43258–43268. [Google Scholar] [CrossRef]
- Mu, W.; Zou, Z.; Sun, H.; Yang, Y. A Control Strategy with Low Power Consumption for Buoyancy Regulation System of Submersibles. J. Xian Jiaotong Univ. 2018, 52, 44–49. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs With Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean. Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Huang, B.; Yang, Q. Double-loop sliding mode controller with a novel switching term for the trajectory tracking of work-class ROVs. Ocean Eng. 2019, 178, 80–94. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.; Lee, S.; Choi, H. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vu, M.T.; Choi, H.S.; Kang, J.; Ji, D.H.; Jeong, S.K. A study on hovering motion of the underwater vehicle with umbilical cable. Ocean Eng. 2017, 135, 137–157. [Google Scholar] [CrossRef]
- Li, X.; Zhao, M.; Ge, T. A Nonlinear Observer for Remotely Operated Vehicles with Cable Effect in Ocean Currents. Appl. Sci. 2018, 8, 867. [Google Scholar] [CrossRef] [Green Version]
- Vu, M.T.; Le, T.; Thanh, H.L.N.N.; Huynh, T.; Van, M.; Hoang, Q.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Salgado-Jiménez, T.; Bandala-Sánchez, M.; Nava-Balanzar, L.; Hernández-Alvarado, R.; Cruz-Ledesma, J.A. Modelling, Design and Robust Control of a Remotely Operated Underwater Vehicle. Int. J. Adv. Robot. Syst. 2014, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Soylu, S.; Buckham, B.J.; Podhorodeski, R.P. A chattering-free sliding-mode controller for underwater vehicles with fault-tolerant infinity-norm thrust allocation. Ocean Eng. 2008, 35, 1647–1659. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-loop chattering-free adaptive integral sliding mode control for underwater vehicles. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
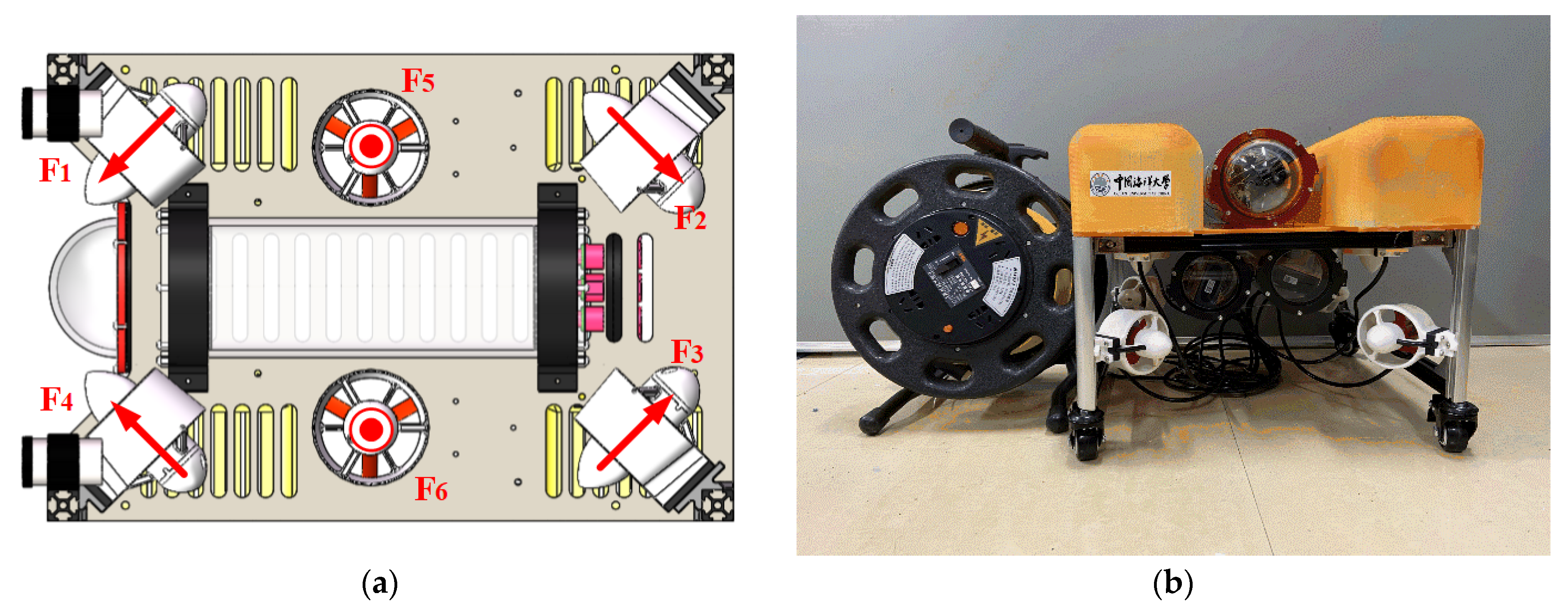
| Parameter | Values |
|---|---|
| dimensions | 0.44 m × 0.33 m × 0.30 m |
| weight | 20 kg |
| volumes | 0.0208 m3 |
| operation depth | 100 m |
| communication | power line communication |
| SoC | raspberry Pi and MK66 microcontroller |
| Parameter | Values | Parameter | Values |
|---|---|---|---|
| 4.68 Nms2 | −102.22 N/s | ||
| −35.17 N/s | −32.73 kg | ||
| −17.25 kg | −35.62 N2/m2 | ||
| −9.44 N2/m2 | −7.869 N/s | ||
| −42.58 N/s | −1.538 kg | ||
| −20.22 kg | −10.65 N2/m2 | ||
| −13.53 N2/m2 |
| Performance Comparison | Values | Parameter | Values |
|---|---|---|---|
| Overshoot (m) | 0.2038 | 0.0128 | 0.0127 |
| Transient Time (s) | 16.30 | 0.007 | 0.006 |
| MEA (m) | 0.0139 | 0.0005 | 0.0004 |
| RMSE (m) | 0.0315 | 0.0060 | 0.0059 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, W.; Wang, Y.; Sun, H.; Liu, G. Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV. J. Mar. Sci. Eng. 2021, 9, 1000. https://doi.org/10.3390/jmse9091000
Mu W, Wang Y, Sun H, Liu G. Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV. Journal of Marine Science and Engineering. 2021; 9(9):1000. https://doi.org/10.3390/jmse9091000
Chicago/Turabian StyleMu, Weilei, Yuxue Wang, Hailiang Sun, and Guijie Liu. 2021. "Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV" Journal of Marine Science and Engineering 9, no. 9: 1000. https://doi.org/10.3390/jmse9091000
APA StyleMu, W., Wang, Y., Sun, H., & Liu, G. (2021). Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV. Journal of Marine Science and Engineering, 9(9), 1000. https://doi.org/10.3390/jmse9091000