
Application of Large Eddy Simulation to Predict Underwater Noise of Marine Propulsors. Part 2: Noise Generation



Abstract
:1. Introduction
1.1. State of the Art
1.2. Contributions of Current Work
2. Materials and Methods
2.1. Methodology
2.1.1. Hydrodynamics
2.1.2. Acoustic Post-Processing
2.2. Numerical Setup
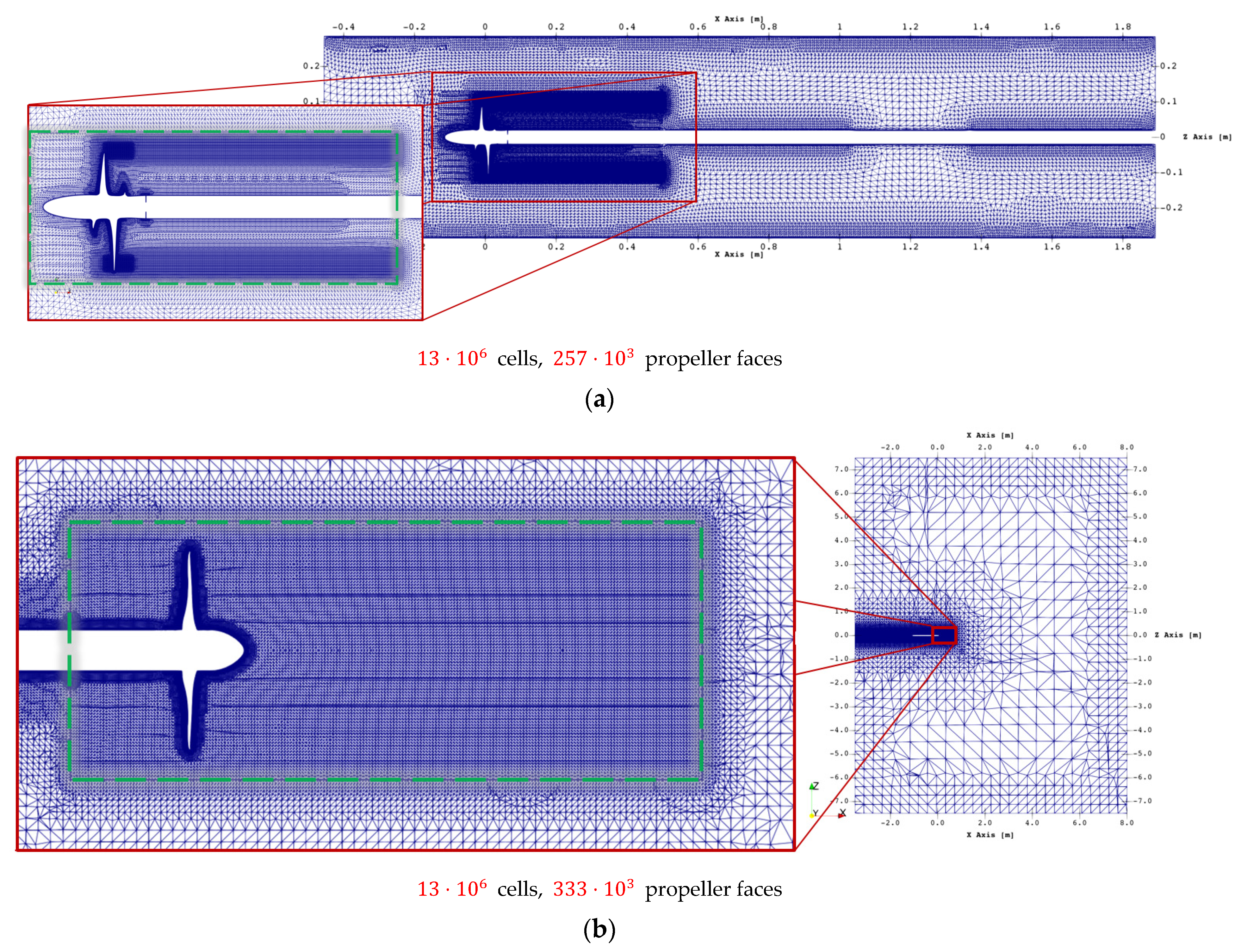
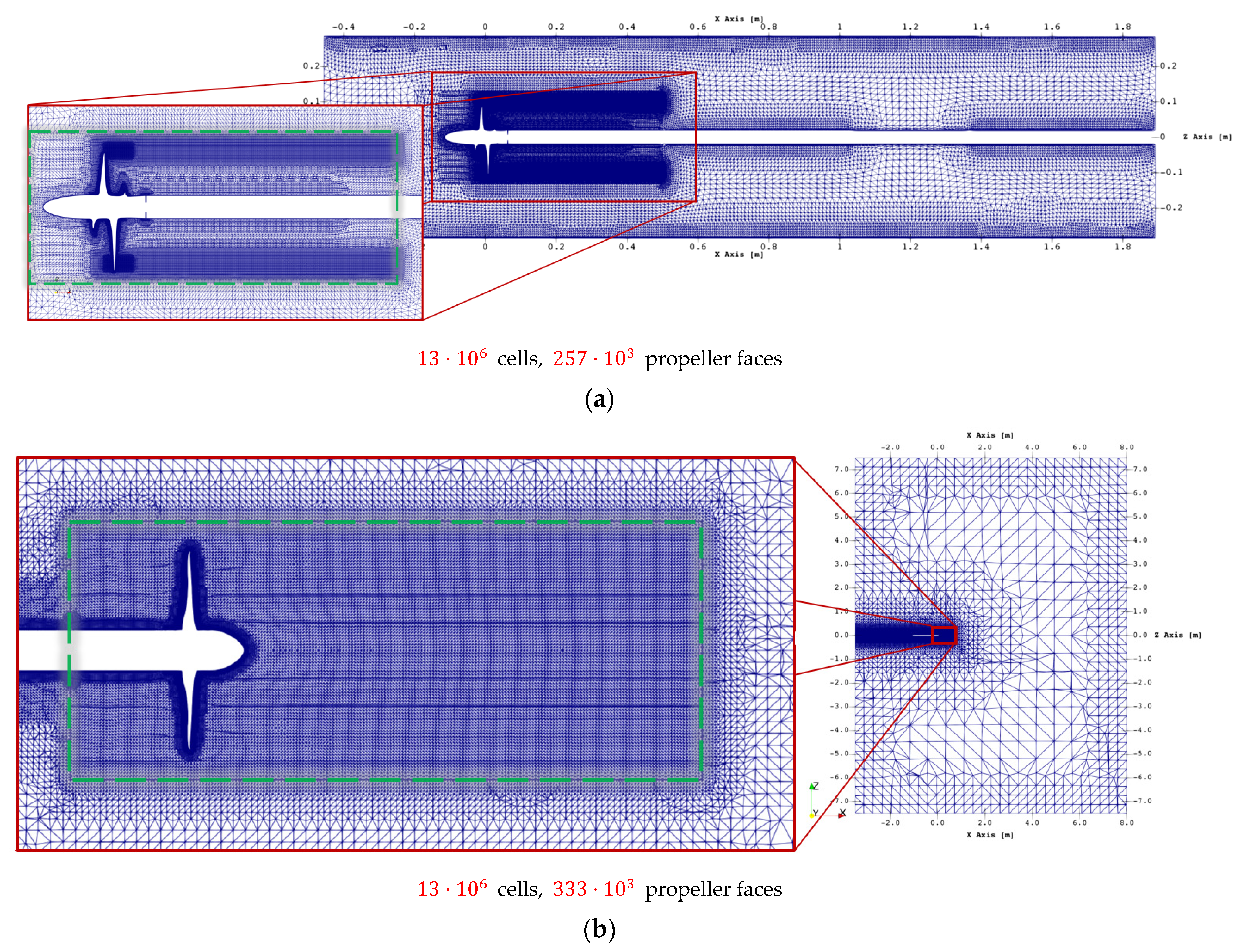
2.2.1. Free-Running Propellers
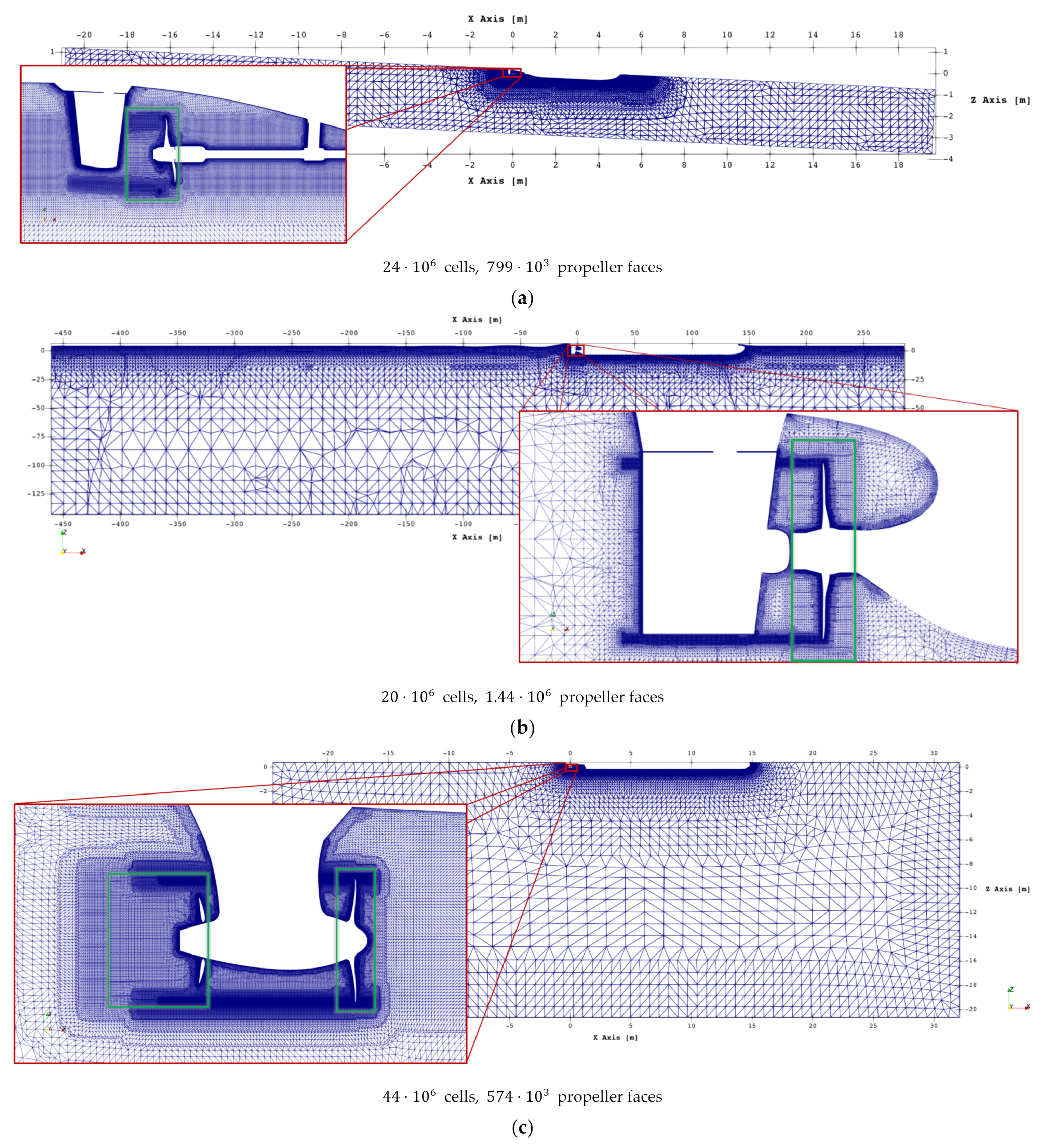
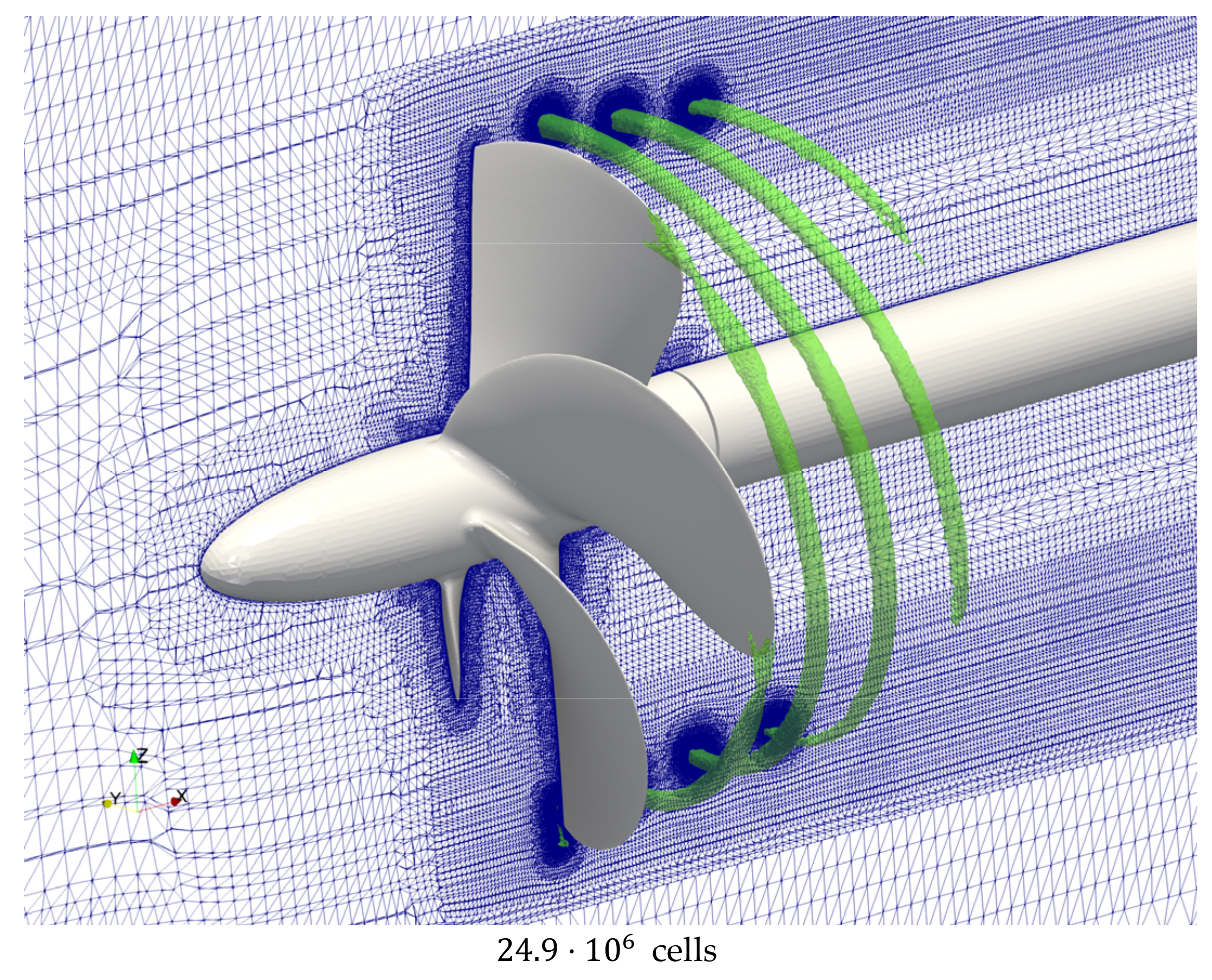
2.2.2. Ship–Propeller Configurations
3. Results
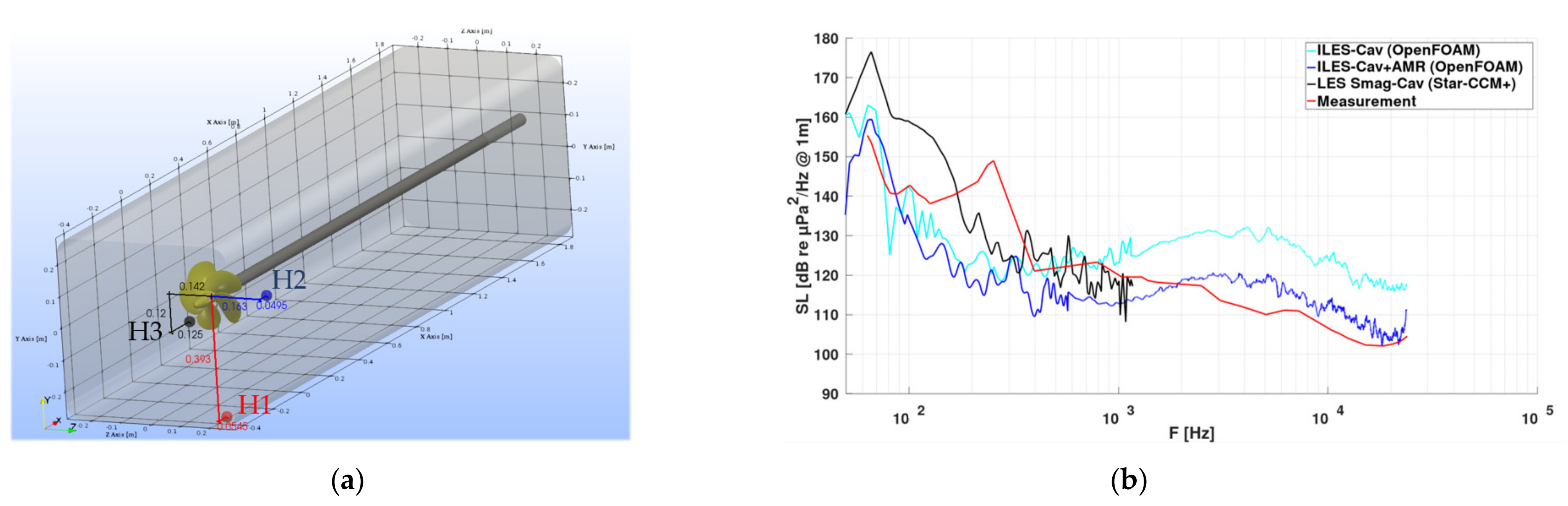
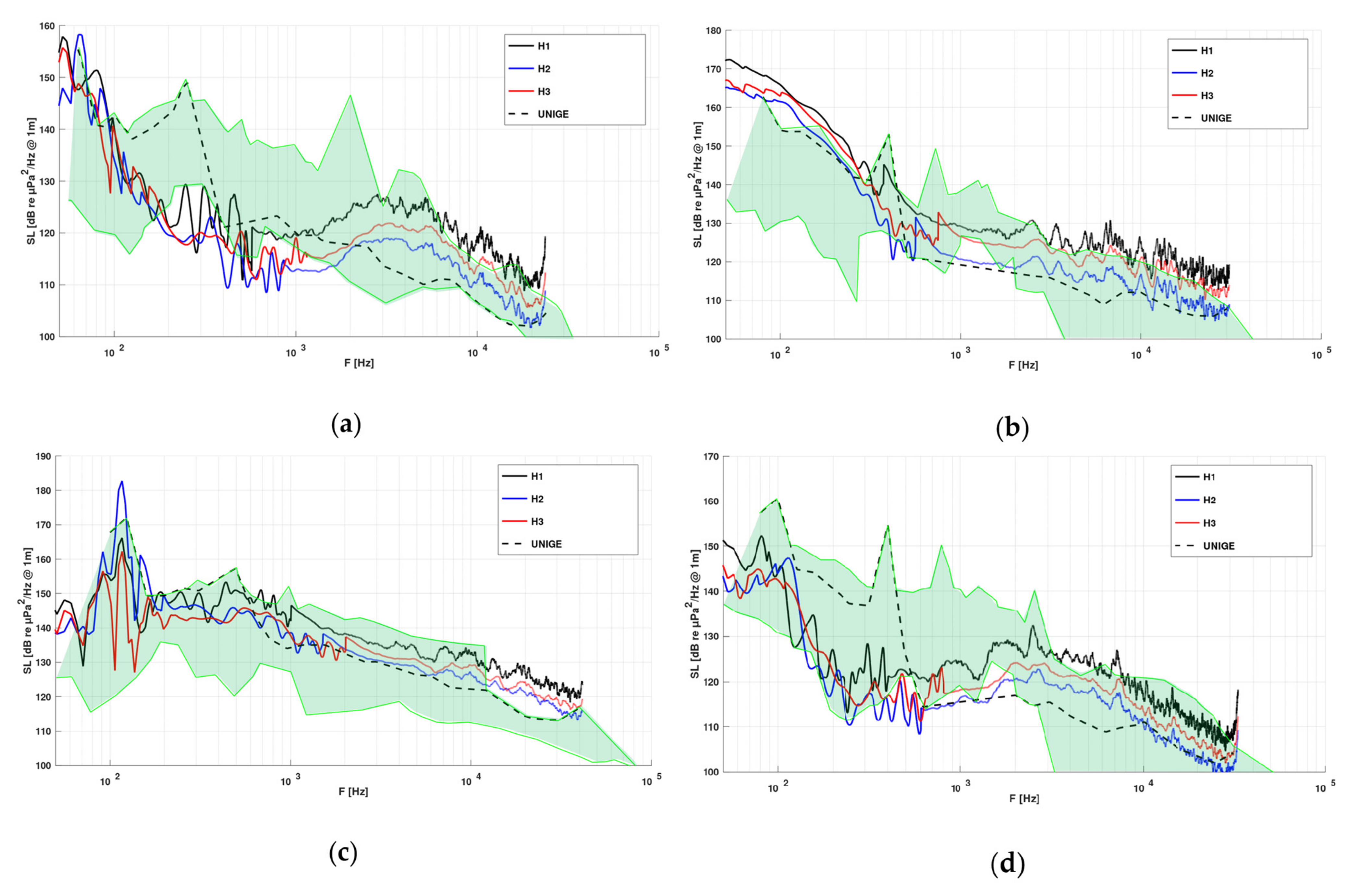
3.1. Radiated Noise Analysis
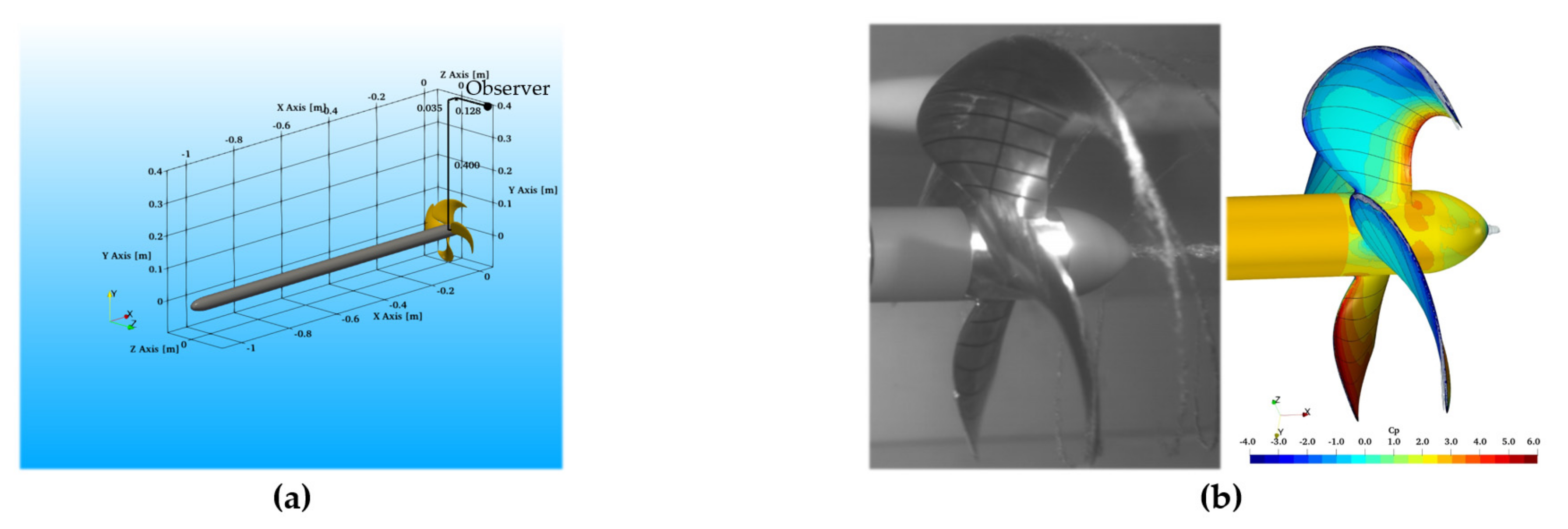
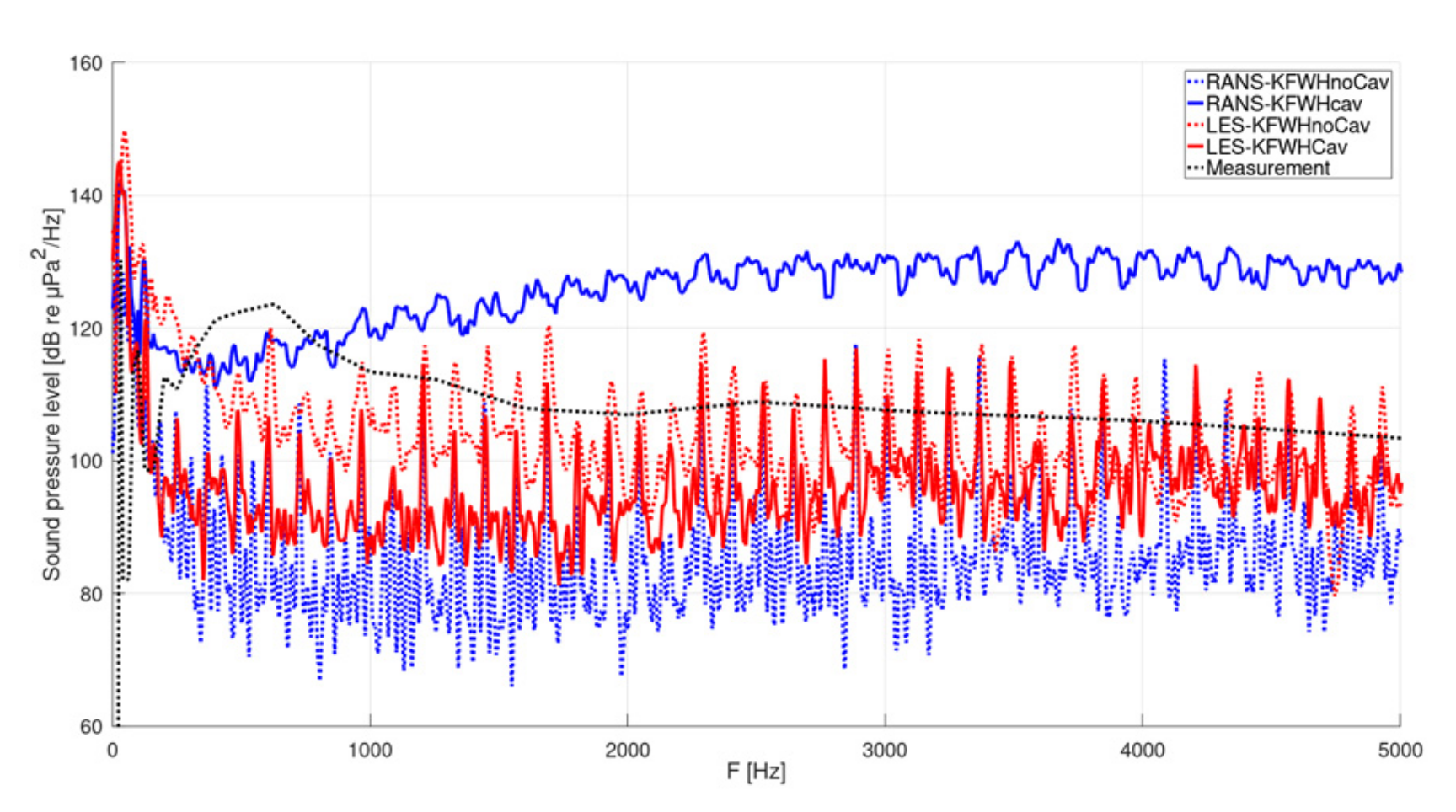
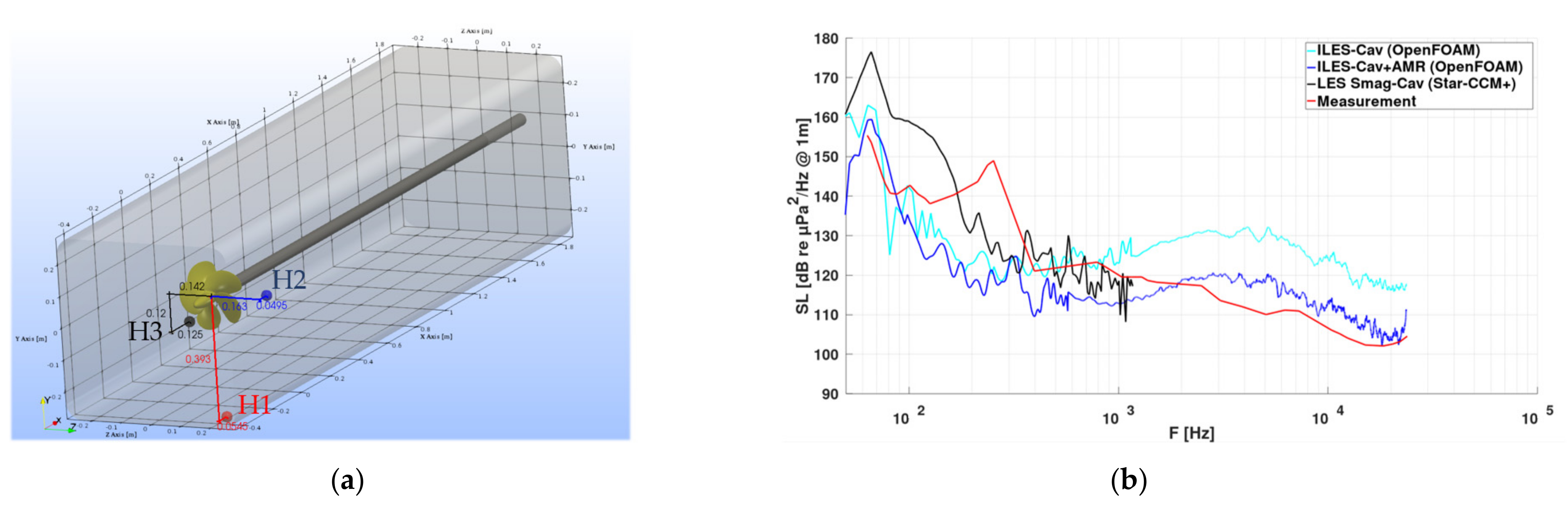
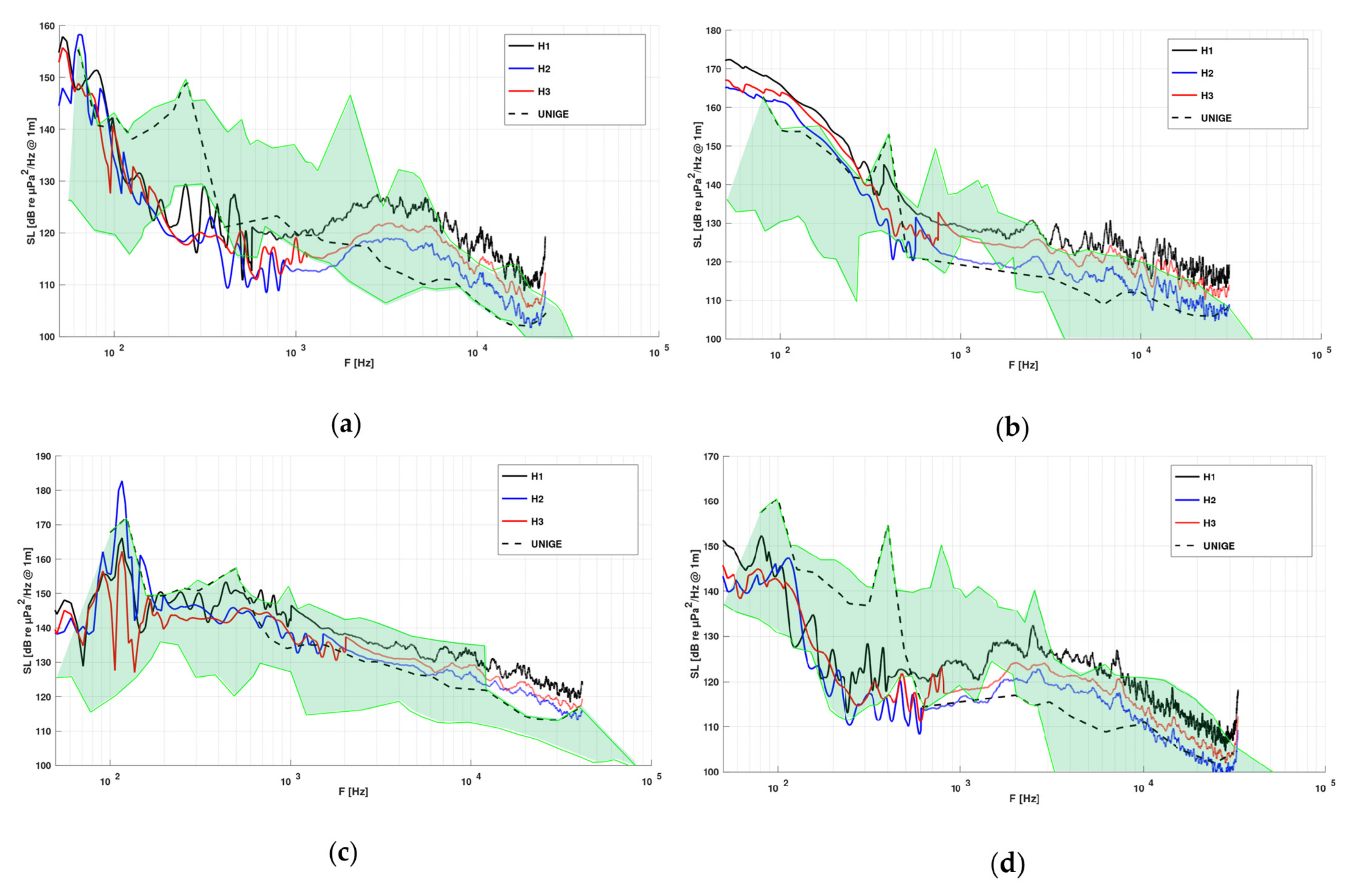
3.1.1. Newcastle Propeller Test Case
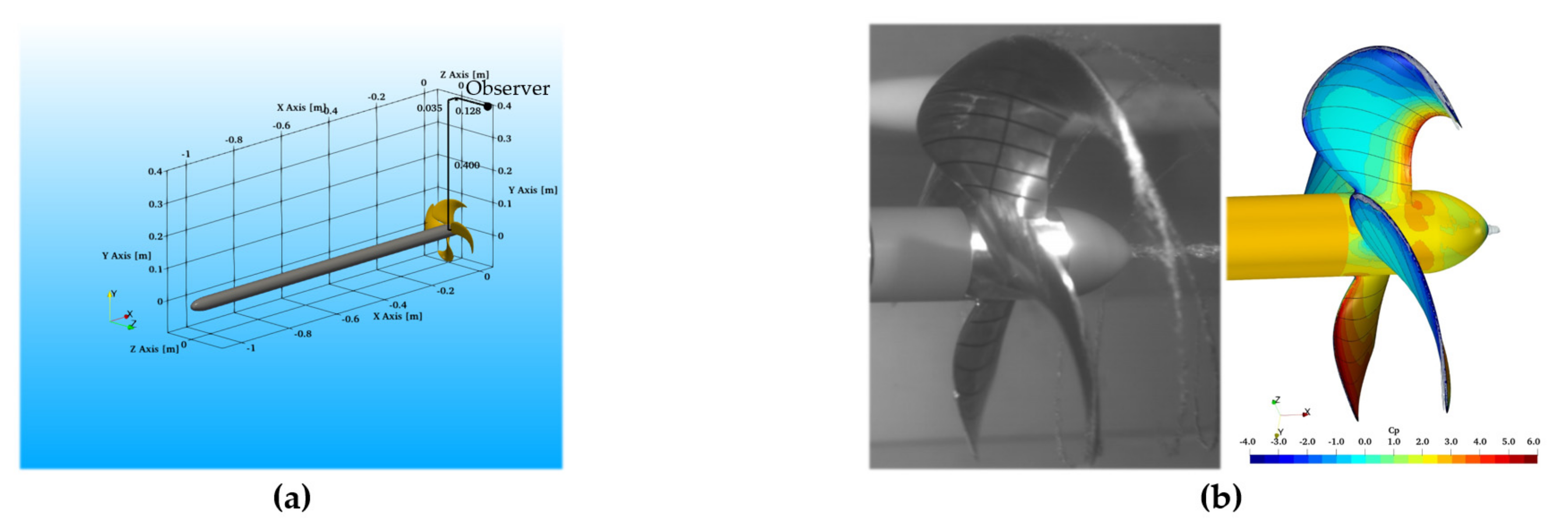
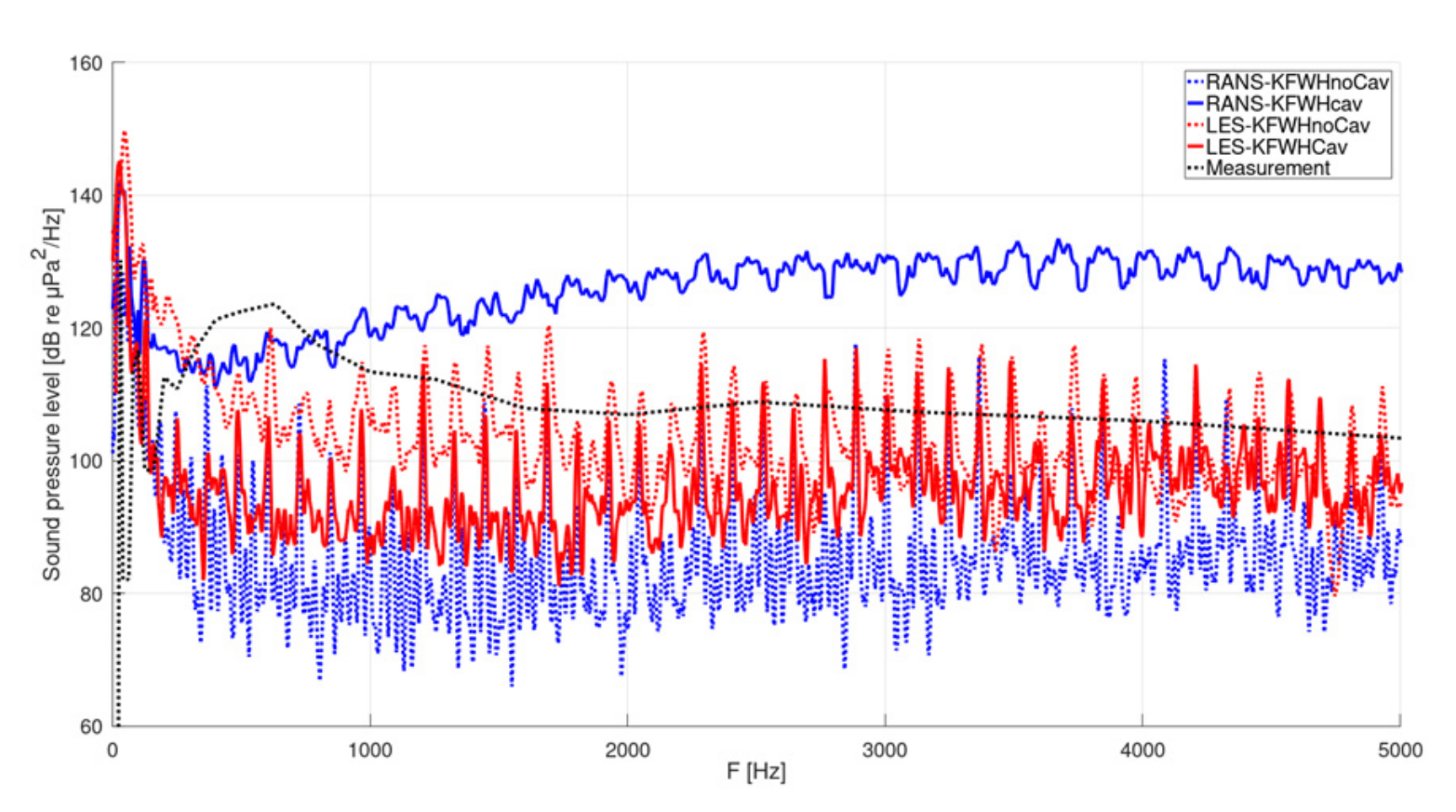
3.1.2. P1595
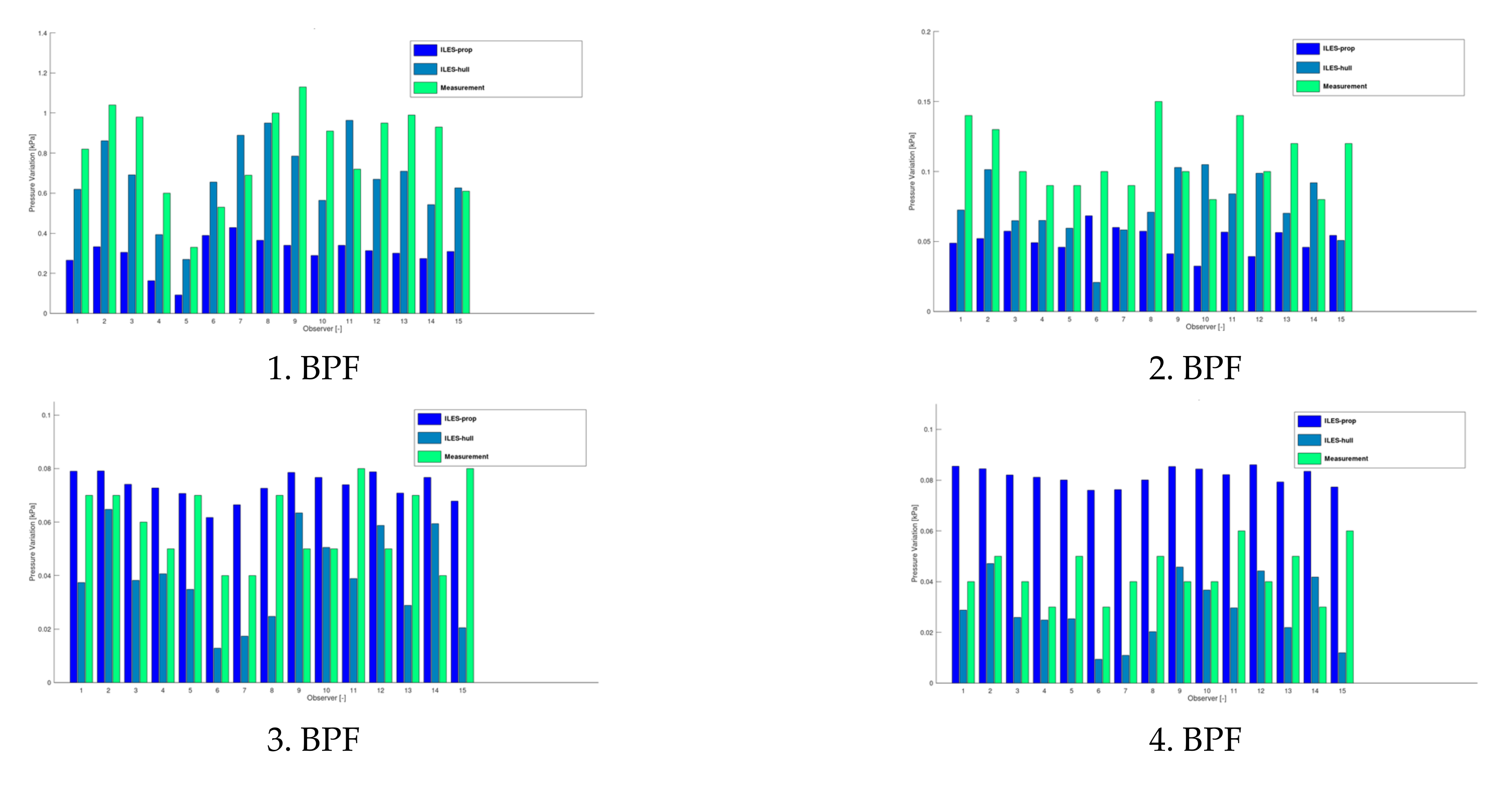
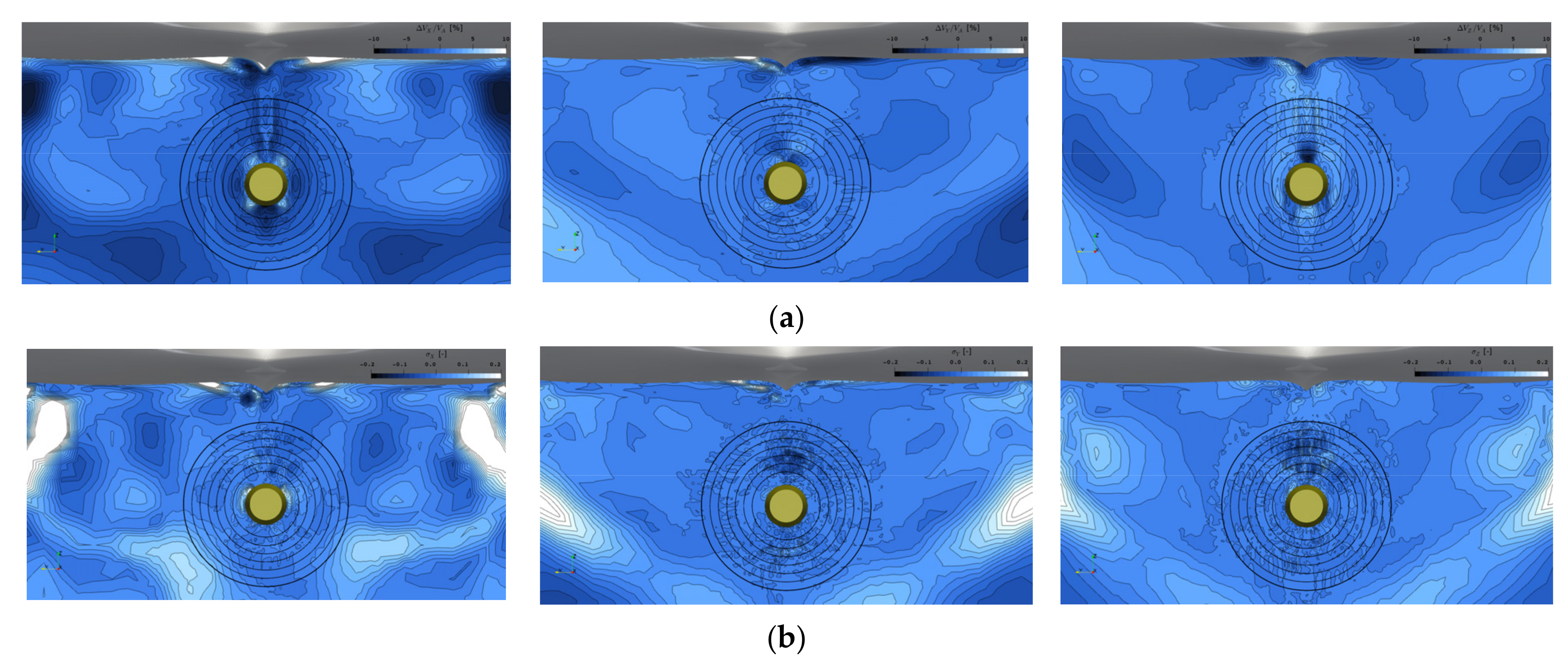
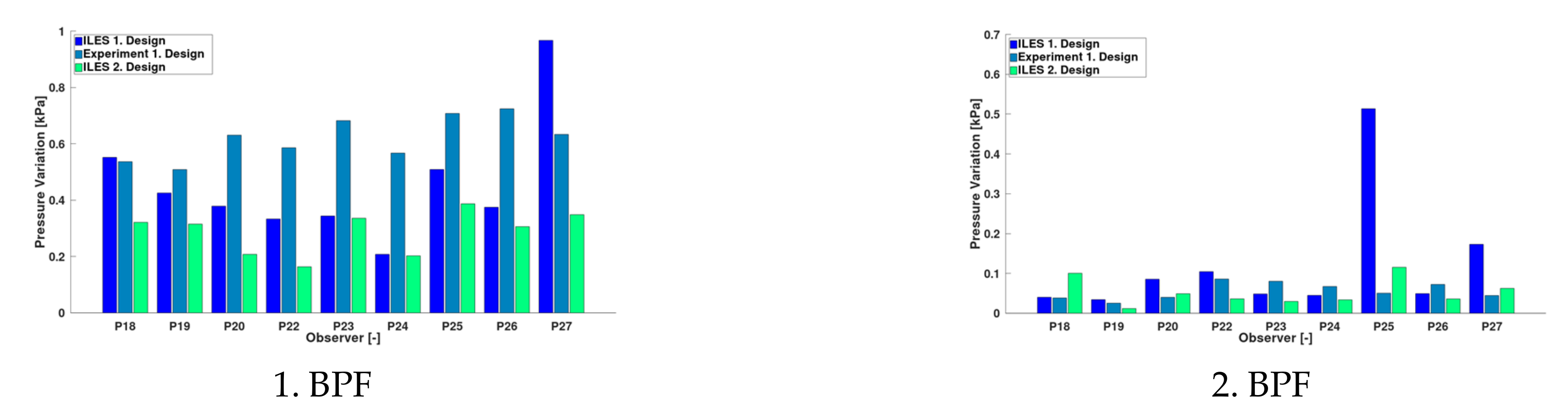
3.2. Behind Ship Investigations
3.2.1. ProNoVi Target Case
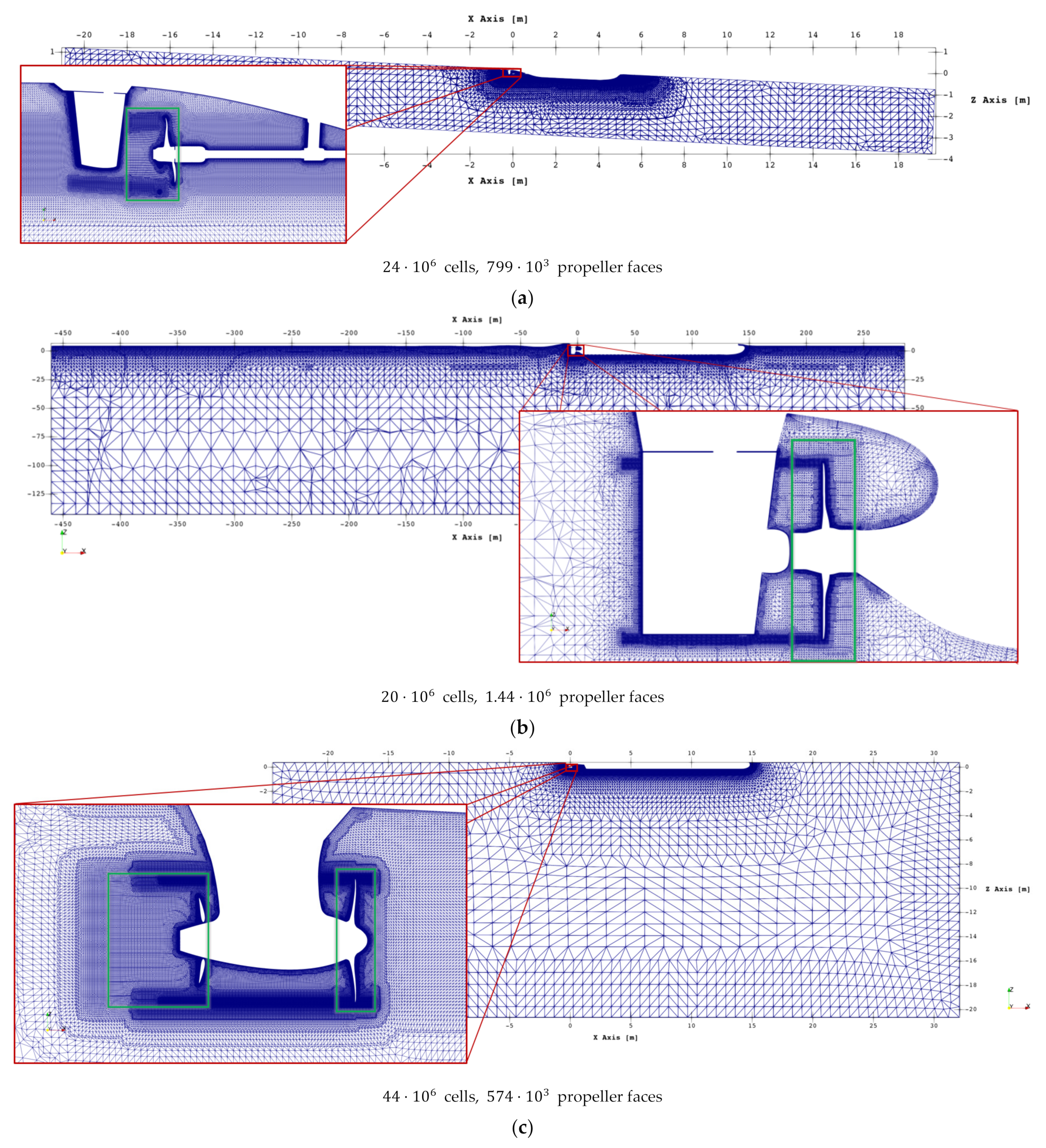
3.2.2. SCHOTTEL Reference Case 1
3.2.3. SCHOTTEL Reference Case 2
4. Discussion
4.1. Noise Generation Mechanisms
- Resolved turbulence,
- Phase transition model, and
- Vorticity-based refinements,
- Reduction of pressure wave propagation by the vapor phase, which dampens the noise, as has been reported in some experiments with steady cavitation;
- Overall, only moderate variation of cavitation volume as a result of the steady tip vortex cavity, which adds purely sinusoidal disturbance to the flow, but no broadband noise.
4.2. Practical Application in the Near Field
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Frisk, G.V. Noiseonomics: The relationship between ambient noise levels in the sea and global economic trends. Sci. Rep. 2012, 2, 437. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wisniewska, D.M.; Johnson, M.; Teilmann, J.; Siebert, U.; Galatius, A.; Dietz, R.; Madsen, P.T. High rates of vessel noise disrupt foraging in wild harbour porpoises (Phocoena phocoena). Proc. R. Soc. B 2018, 285, 20172314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wysocki, L.E.; Dittami, J.P.; Ladich, F. Ship noise and cortisol secretion in European freshwater fishes. Biol. Conserv. 2005, 128, 501–508. [Google Scholar] [CrossRef]
- DNV GL. Rules for the Classification Ship, Part 6 Additional Class Notation Chapter 7 Environmental Protection and Pollutrion Control. 2017. Available online: https://rules.dnv.com/docs/pdf/DNV/ru-ship/2017-01/DNVGL-RU-SHIP-Pt6Ch7.pdf (accessed on 16 July 2021).
- Bretschneider, H.; Bosschers, J.; Choi, G.H.; Ciappi, E.; Farabee, T.; Kawakita, C.; Tang, D. Specialist Committee on Hydrodynamic Noise; ITTC: Copenhagen, Denmark, 2014. [Google Scholar]
- IMO. Guidelines for the Reduction of Underwater Noise from Commercial Shipping to Address Adverse Impacts on Marine Life; IMO: London, UK, 2014. [Google Scholar]
- Wittekind, D.; Schuster, M. Propeller cavitation noise and background noise in the sea. Ocean Eng. 2016, 120, 116–121. [Google Scholar] [CrossRef]
- Van Wijngaarden, E. Prediction of Propeller-Induced Hull-Pressure Fluctuations; Maritime Research Institute Netherlands: Wageningen, The Netherlands, 2011. [Google Scholar]
- Kim, S.; Kinnas, S.A. Prediction of unsteady developed tip vortex cavitation and its effect on the induced hull pressures. In Proceedings of the Sixth International Symposium on Marine Propulsors, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Göttsche, U.; Lampe, T.; Scharf, M.; Abdel-Maksoud, M. Evaluation of underwater sound propagation of a catamaran with cavitating propellers. In Proceedings of the Sixth International Symposium on Marine Propulsors, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Bensow, R.E.; Liefvendahl, M. Implicit and explicit subgrid modeling in les applied to a marine propeller. In Proceedings of the 38th Fluid Dynamics Conference and Exhibit, Seattle, WA, USA, 23–26 June 2008. [Google Scholar]
- Kimmerl, J.; Mertes, P.; Abdel-Maksoud, M. Application of large eddy simulation to predict underwater noise of marine propulsors. Part 1 Cavitation Dynamics. Ocean Eng. 2021. In Press. [Google Scholar]
- Bensow, R.E.; Liefvendahl, M. An acoustic analogy and scale-resolving flow simulation methodology for the prediction of propeller radiated noise. In Proceedings of the 31st Symposium on Naval Hydrodynamics, Monterey, CA, USA, 11–16 September 2016. [Google Scholar]
- Kinnas, S.; Abdel-Maksoud, M.; Barkmann, U.; Lübke, L.; Tian, Y. Proceedings of the Second Workshop on Cavitation and Propeller Performance. In Proceedings of the The Fourth International Symposium on Marine Propulsors, Austin, TX, USA, 31 May–4 June 2015. [Google Scholar]
- Yilmaz, N.; Atlar, M.; Fitzsimmons, P. An improved tip vortex cavitation model for propeller-rudder interaction. In Proceedings of the 10th International Cavitation Symposium, Baltimore, MD, USA, 14–16 May 2018. [Google Scholar]
- Yilmaz, N.; Aktas, B.; Atlar, M.; Fitzsimmons, P.; Felli, M. An experimental and numerical investigation of propeller-rudder-hull interaction in the presence of tip vortex cavitation (TVC). Ocean Eng. 2020, 216, 108024. [Google Scholar] [CrossRef]
- Lidtke, K. Predicting Radiated Noise of Marine Propellers Using Acoustic Analogies and Hybrid Eulerian-Lagrangian Cavitation Models. Ph.D. Thesis, University of Southampton, Southampton, UK, 2017. [Google Scholar]
- Liefvendahl, M.; Bensow, R. Simulation-based analysis of flow-generated noise from cylinders with different cross-sections. In Proceedings of the 32nd Symposium on Naval Hydrodynamics, Hamburg, Germany, 5–10 August 2018. [Google Scholar]
- Sezen, S.; Atlar, M.; Fitzsimmons, P. Prediction of cavitating propeller underwater radiated noise using RANS & DES-based hybrid method. In Ships and Offshore Structures; Taylor & Francis: Abingdon, UK, 2021. [Google Scholar]
- Kimmerl, J.; Mertes, P.; Abdel-Maksoud, M. Application of large eddy simulation to predict underwater noise of marine propulsors. part 1 cavitation dynamics. J. Mar. Sci. Eng. 2021, 6, 56. [Google Scholar]
- Kimmerl, J.; Mertes, P.; Abdel-Maksoud, M. Turbulence modelling capabilities of iles for propeller induced urn prediction. In Proceedings of the SNAME Maritime Convention 2020, Houston, TX, USA, 29 September–1 October 2020. [Google Scholar]
- Tani, G.; Viviani, M.; Felli, M.; Lafeber, F.H.; Lloyd, T.; Aktas, B.; Atlar, M.; Seol, H.; Hallander, J.; Sakamoto, N.; et al. Round robin test on radiated noise of a cavitating propeller. In Proceedings of the Sixth International Symposium on Marine Propulsors, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Williams, J.E.F.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. Lond. Ser. Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar]
- Lidtke, K.; Lloyd, T.; Vaz, G. Acoustic modelling of a propeller subject to non-uniform inflow. In Proceedings of the Sixth International Symposium on Marine Propulsors, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Sagaut, P. Large Eddy Simulation for Incompressible Flows; Springer: New York, NY, USA, 2006. [Google Scholar]
- Kuiper, G. Cavitation Inception on Ship Propeller Models. Ph.D. Thesis, TU Delft, Wageningen, The Netherlands, 1981. [Google Scholar]
- Tani, G.; Aktas, B.; Viviani, M.; Atlar, M. Two medium size cavitation tunnel hydro-acoustic benchmark experiment comparisons as part of a round robin test campaign. Ocean Eng. 2017, 138, 179–207. [Google Scholar] [CrossRef] [Green Version]
- Bosschers, J. Analysis of inertial waves on inviscid cavitating vortices in relation to lowfrequency radiated noise. In Proceedings of the Warwick Innovative Manufacturing Research Centre (WIMRC) Cavitation: Turbo-Machinery and Medical Applications Forum, Warwick, UK, 24 March 2008. [Google Scholar]
- Pennings, P.; Westerweel, J.; van Terwisga, T. Cavitation tunnel analysis of radiated sound from the resonance of a propeller tip vortex cavity. Int. J. Multiph. Flow 2016, 83, 1–11. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||
|---|---|---|
| Unit | ||
| Value |
| Condition | C1 | C2 | C3 | C6 |
|---|---|---|---|---|
| [Hz] | 35 | 35 | 35 | 35 |
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Diameter | |||
| Design pitch ratio | |||
| Chord length at | |||
| Max. thickness at | |||
| Area ratio | |||
| Hub ratio | |||
| Skew-angle | |||
| Number of blades | |||
| Sense of rotation | - | ||
| Type of propeller | - |
| Newcastle | P1595 | |
| Initial mesh | ||
| Refinement step | C1: C2: C3: C6: | - |
| Type | |||||
|---|---|---|---|---|---|
| Experiment (Cav Off) | 0.305 | 0.536 | - | - | - |
| Experiment (Cav On) | 0.302 | - | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kimmerl, J.; Mertes, P.; Abdel-Maksoud, M. Application of Large Eddy Simulation to Predict Underwater Noise of Marine Propulsors. Part 2: Noise Generation. J. Mar. Sci. Eng. 2021, 9, 778. https://doi.org/10.3390/jmse9070778
Kimmerl J, Mertes P, Abdel-Maksoud M. Application of Large Eddy Simulation to Predict Underwater Noise of Marine Propulsors. Part 2: Noise Generation. Journal of Marine Science and Engineering. 2021; 9(7):778. https://doi.org/10.3390/jmse9070778
Chicago/Turabian StyleKimmerl, Julian, Paul Mertes, and Moustafa Abdel-Maksoud. 2021. "Application of Large Eddy Simulation to Predict Underwater Noise of Marine Propulsors. Part 2: Noise Generation" Journal of Marine Science and Engineering 9, no. 7: 778. https://doi.org/10.3390/jmse9070778
APA StyleKimmerl, J., Mertes, P., & Abdel-Maksoud, M. (2021). Application of Large Eddy Simulation to Predict Underwater Noise of Marine Propulsors. Part 2: Noise Generation. Journal of Marine Science and Engineering, 9(7), 778. https://doi.org/10.3390/jmse9070778