
Research on Improving the Working Efficiency of Hydraulic Jet Submarine Cable Laying Machine

 ,
,  ,
,  and
and
Abstract
1. Introduction
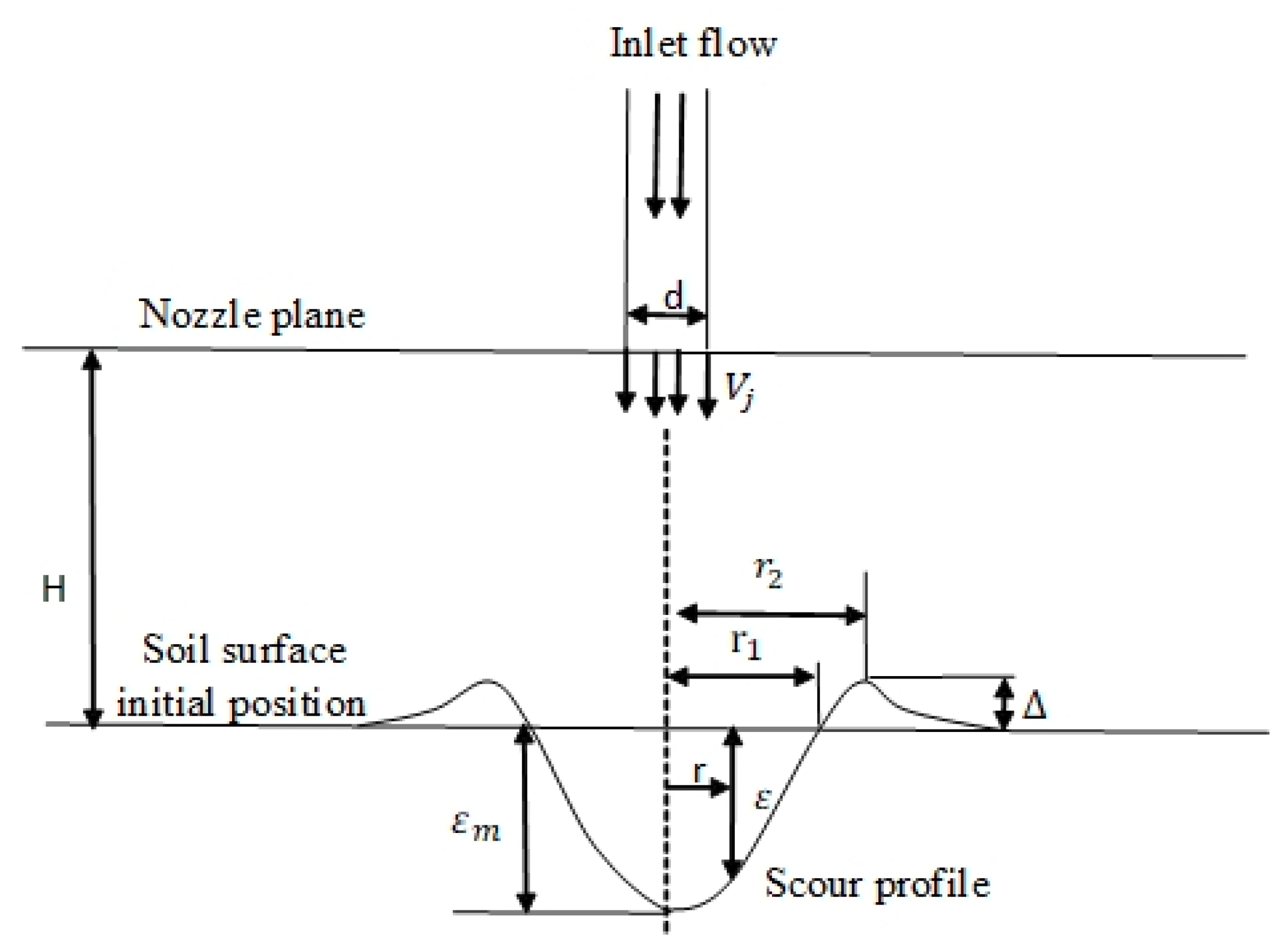
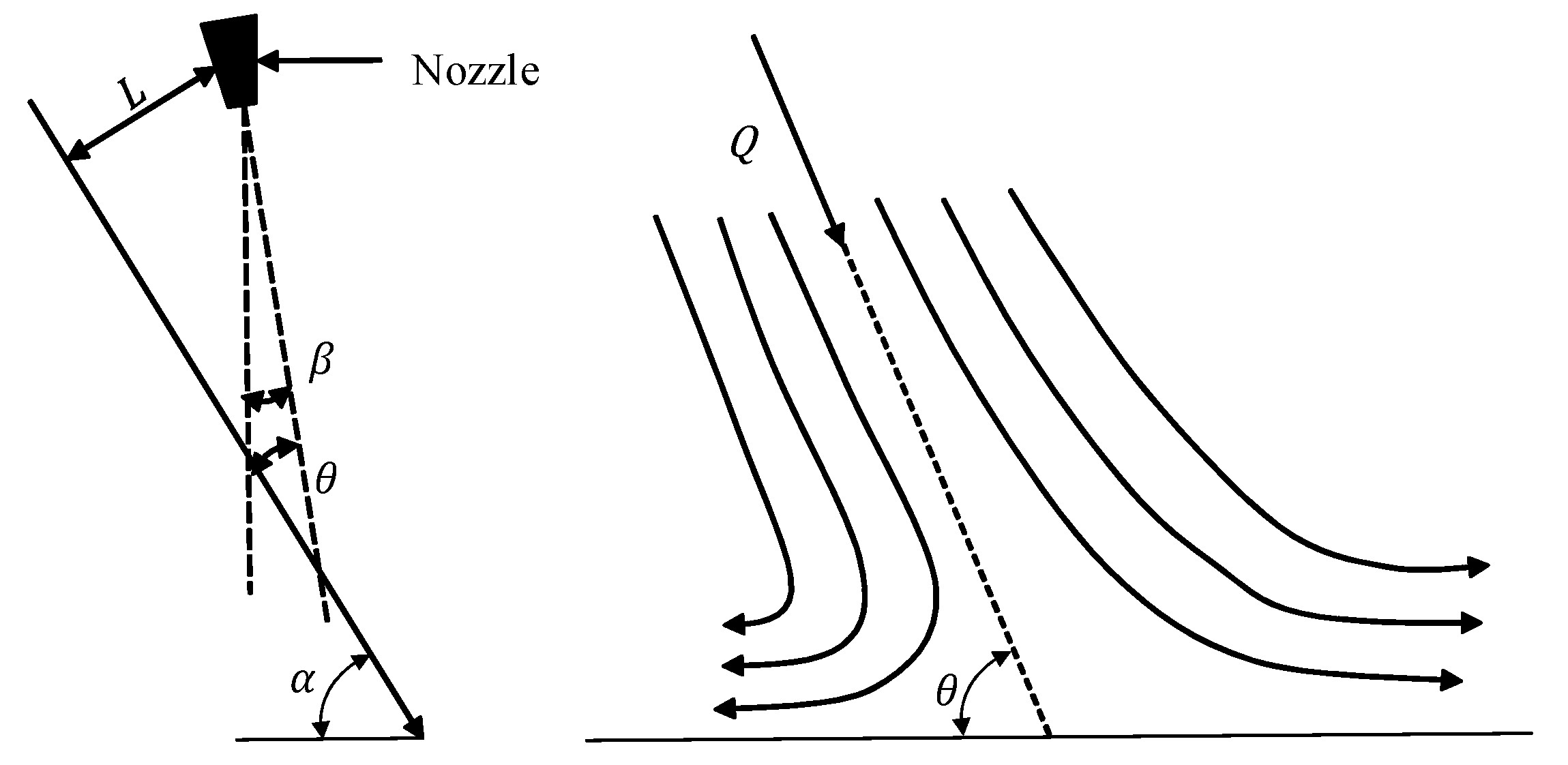
2. Mechanism Analysis
3. Numerical Simulation Analysis
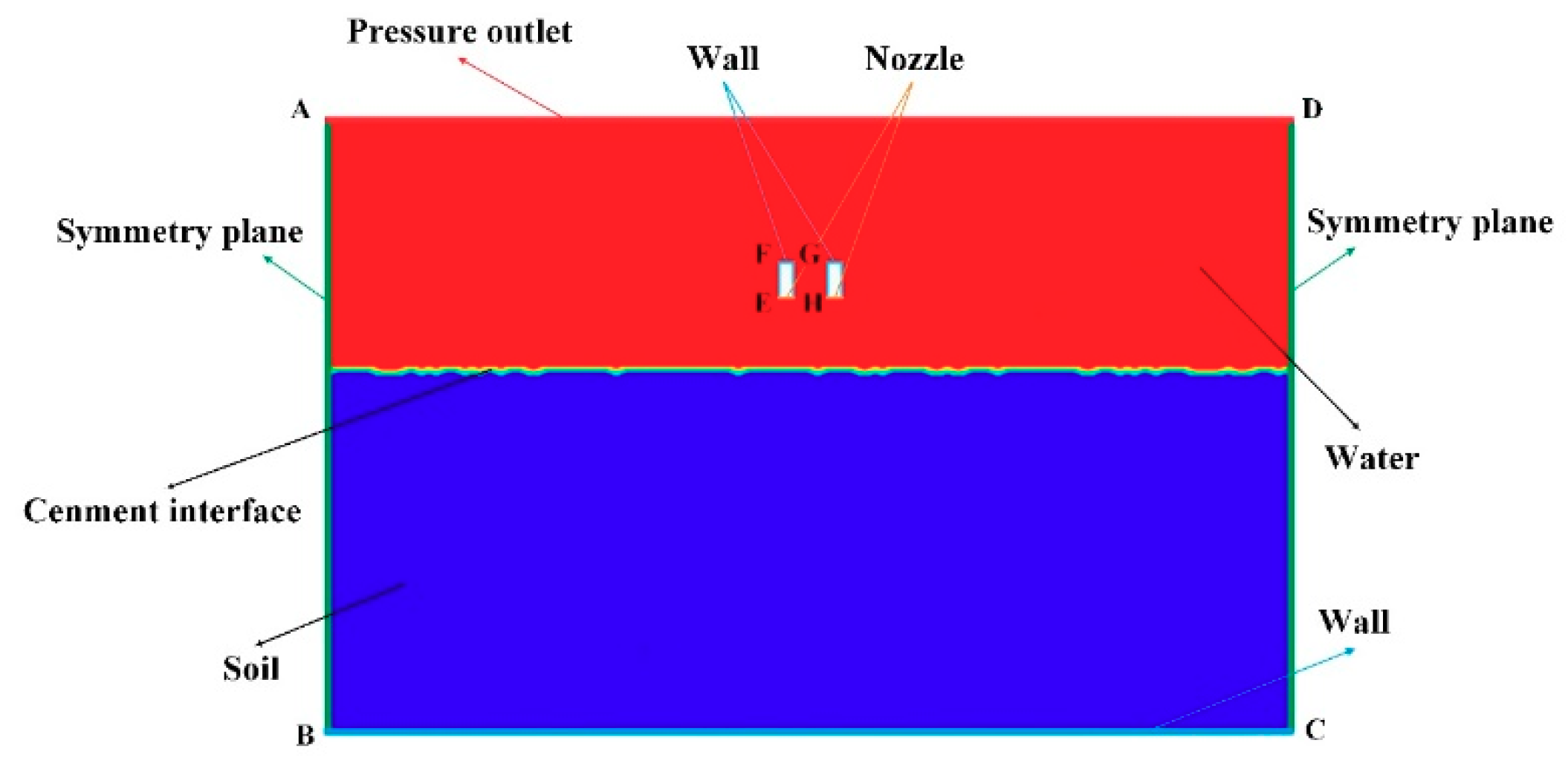
3.1. Finite Element Method
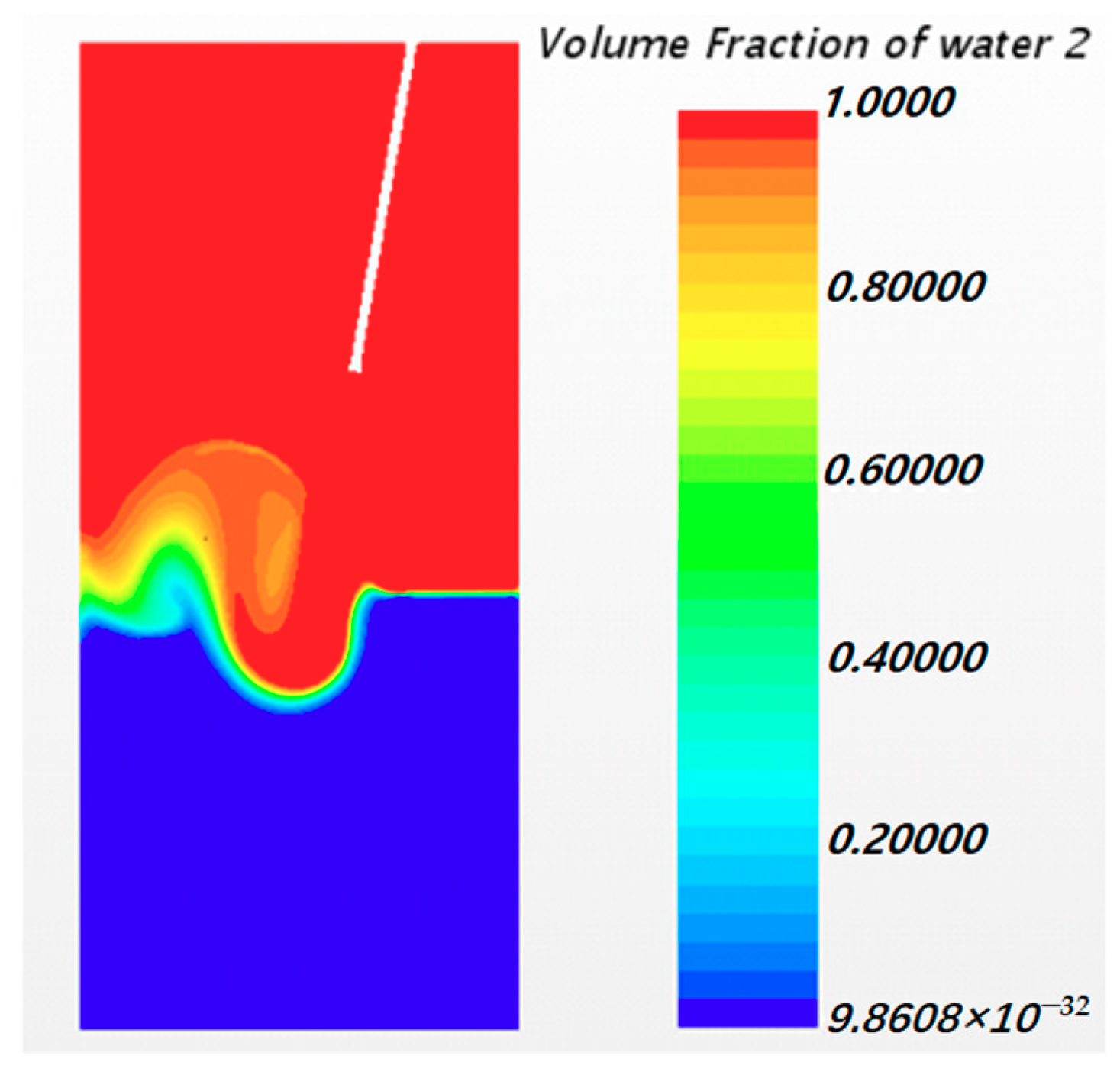
3.2. Simulation Results
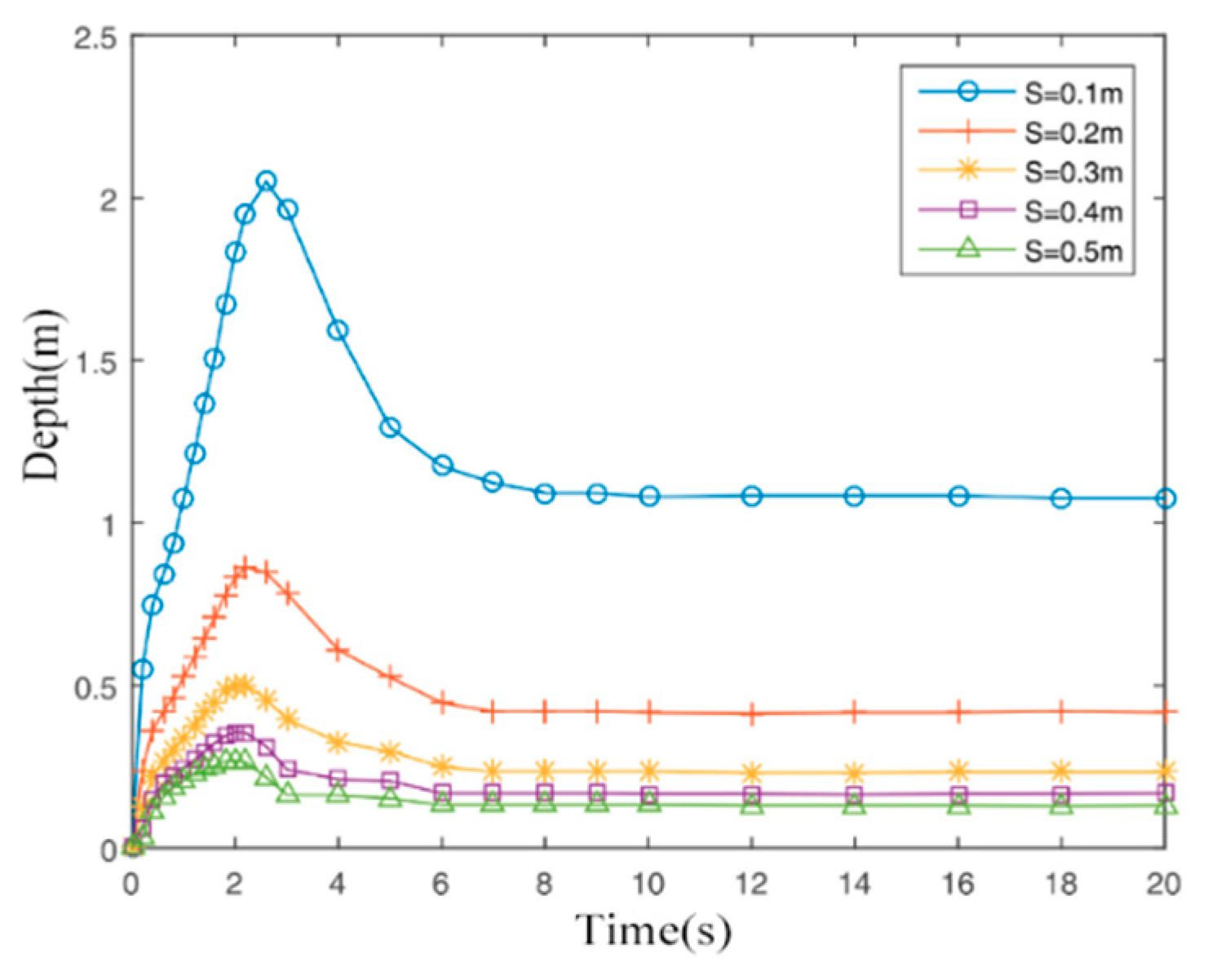
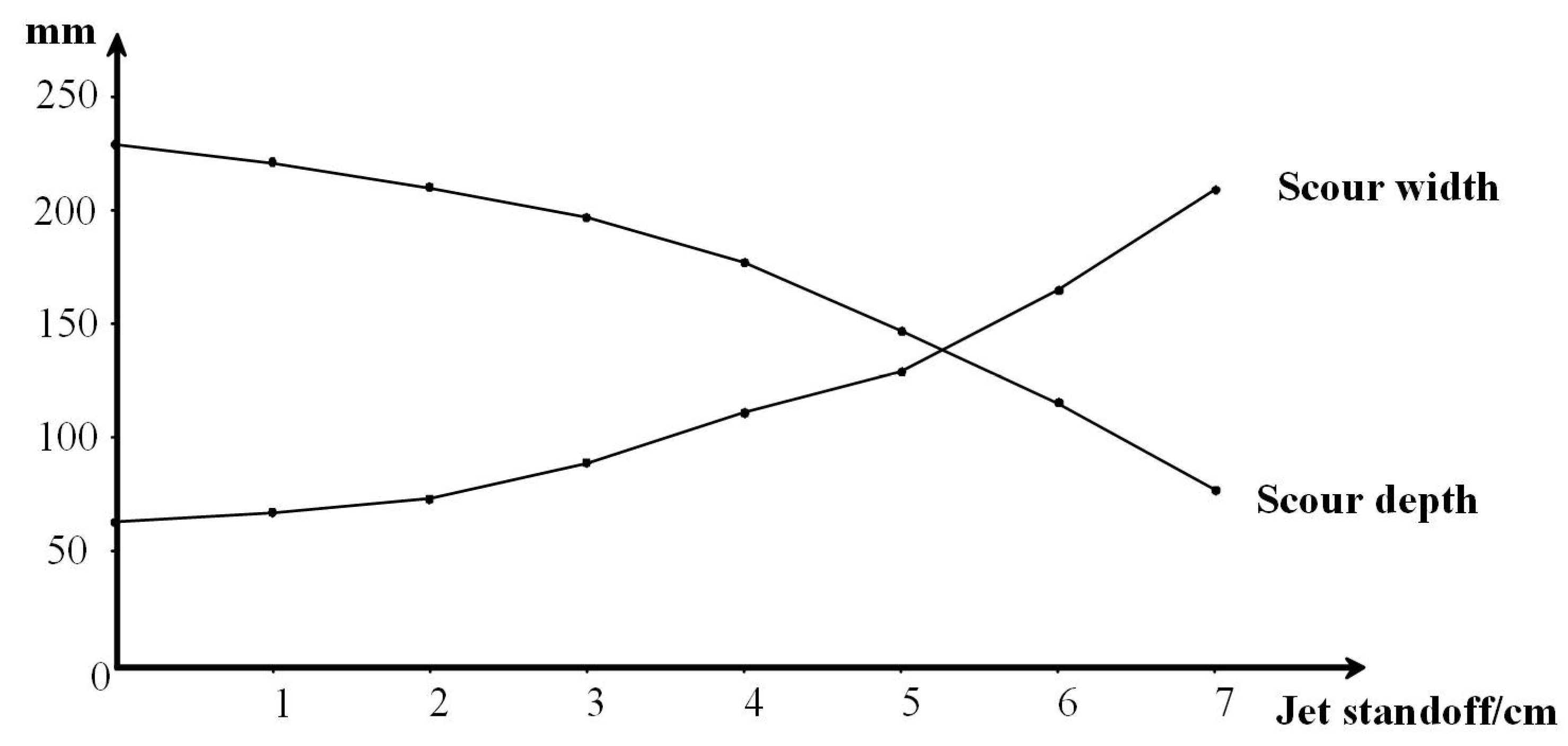
3.2.1. Influence of Standoff Distance on Jet Flow Effect
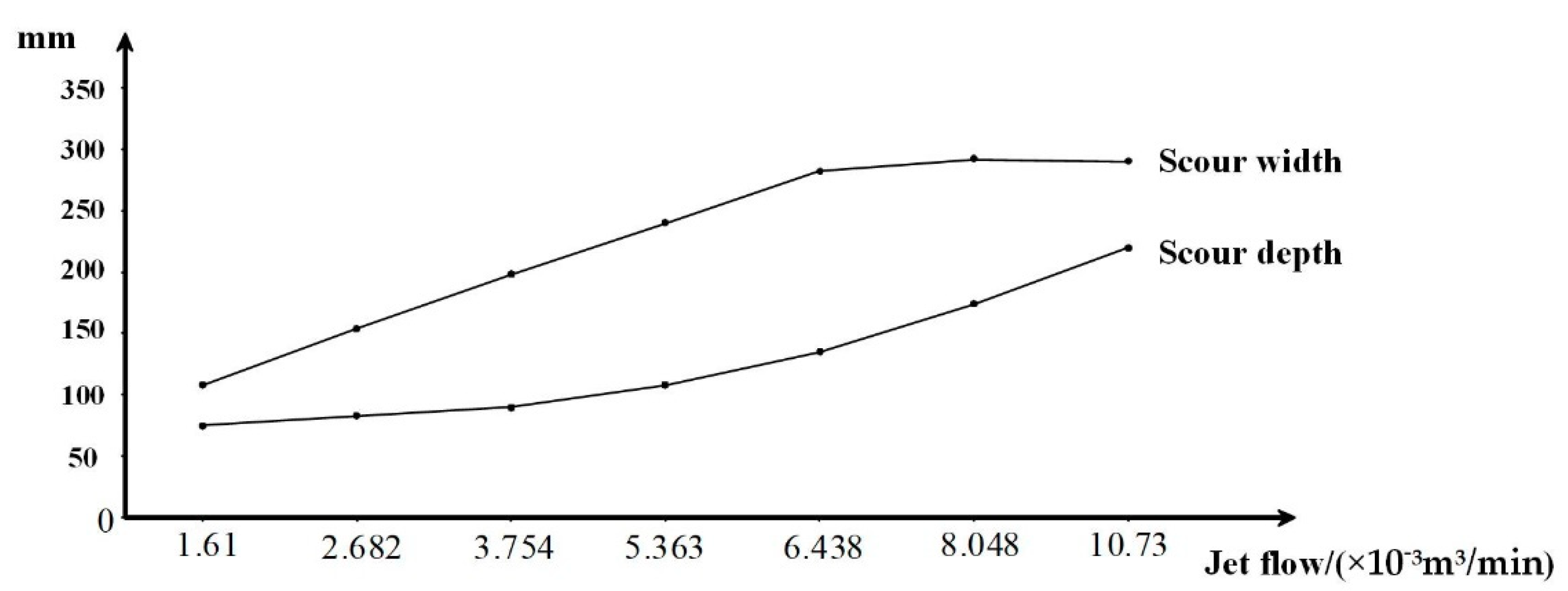
3.2.2. Influence of Jet Flow Rate on Jet Flow Effect
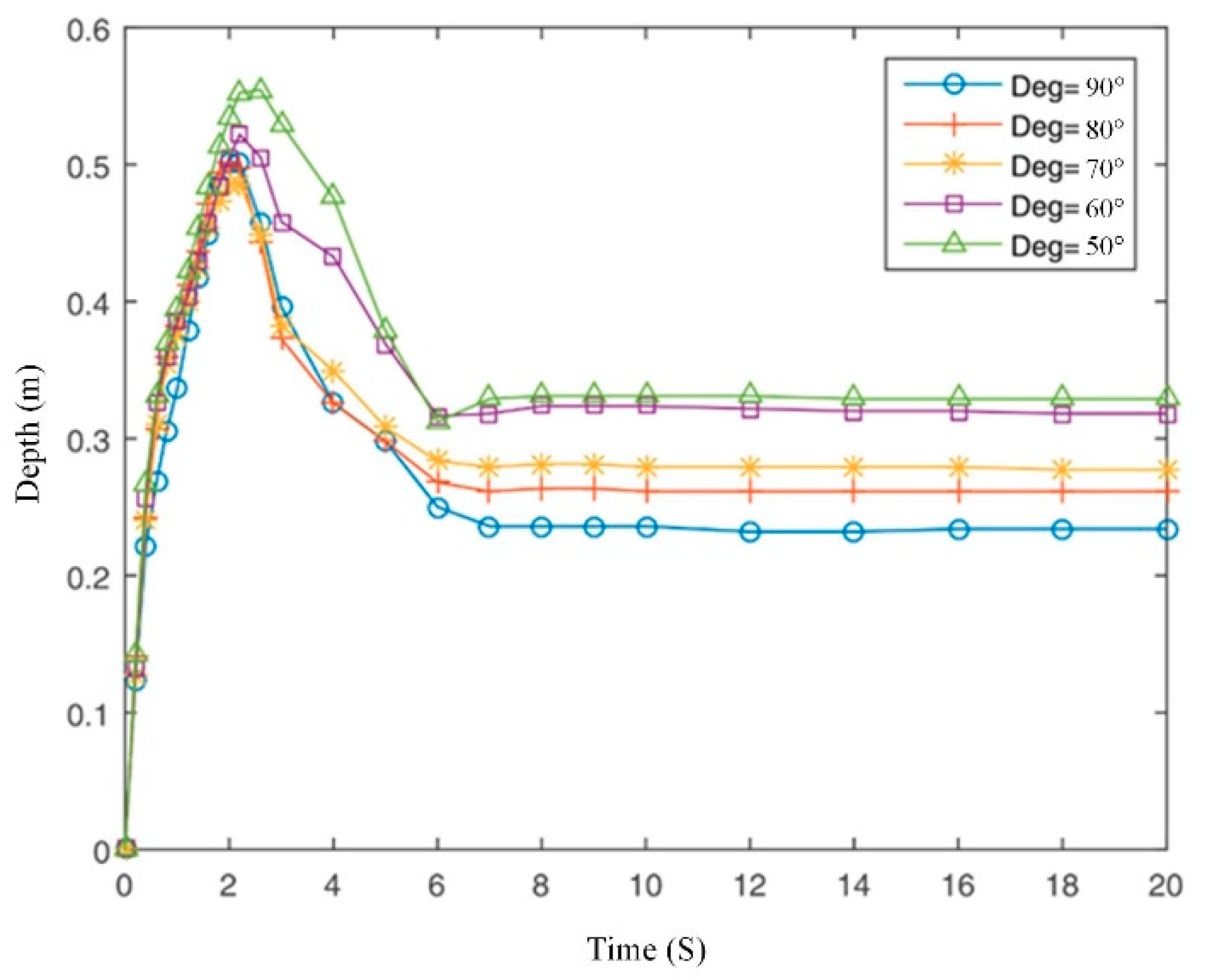
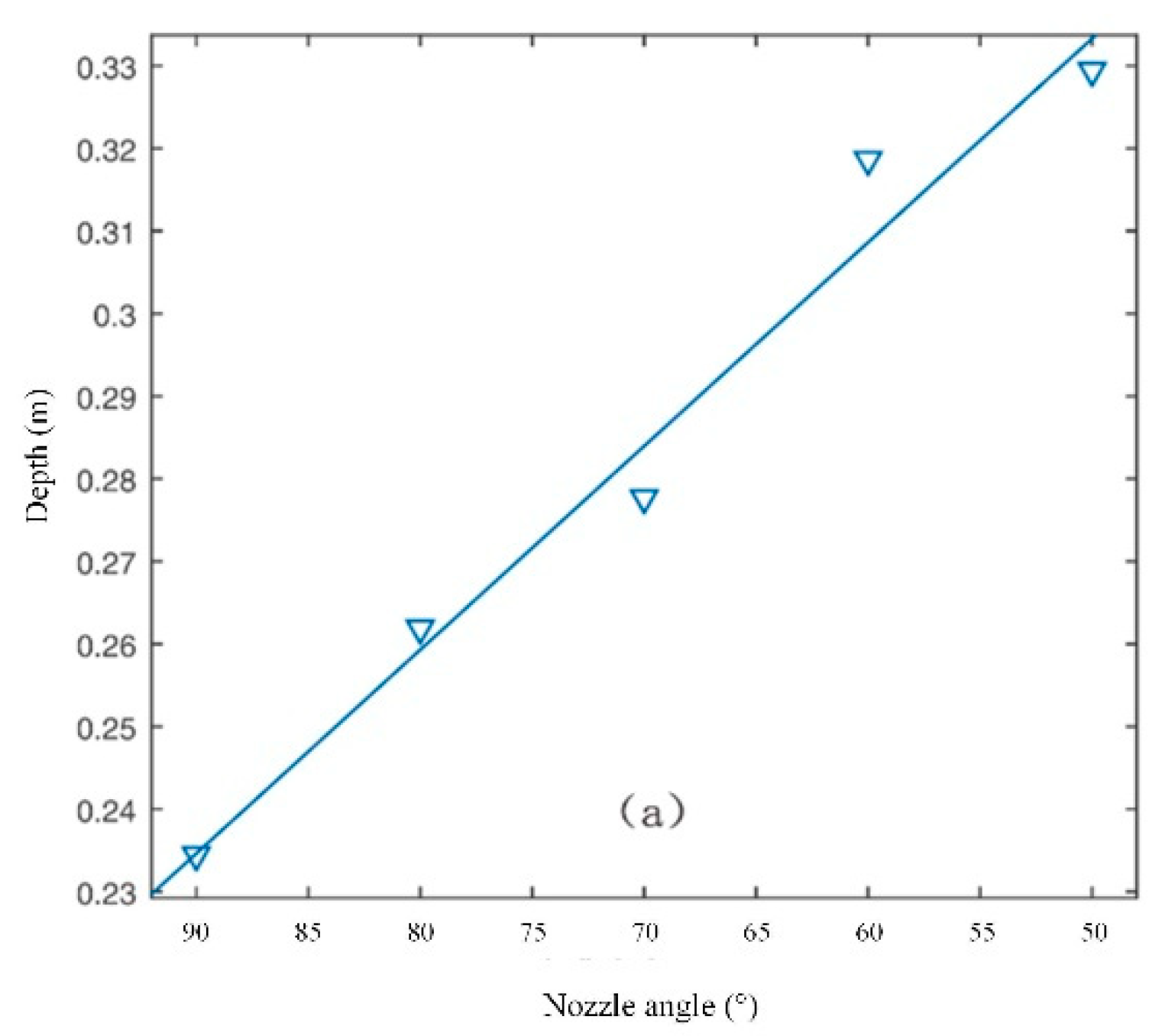
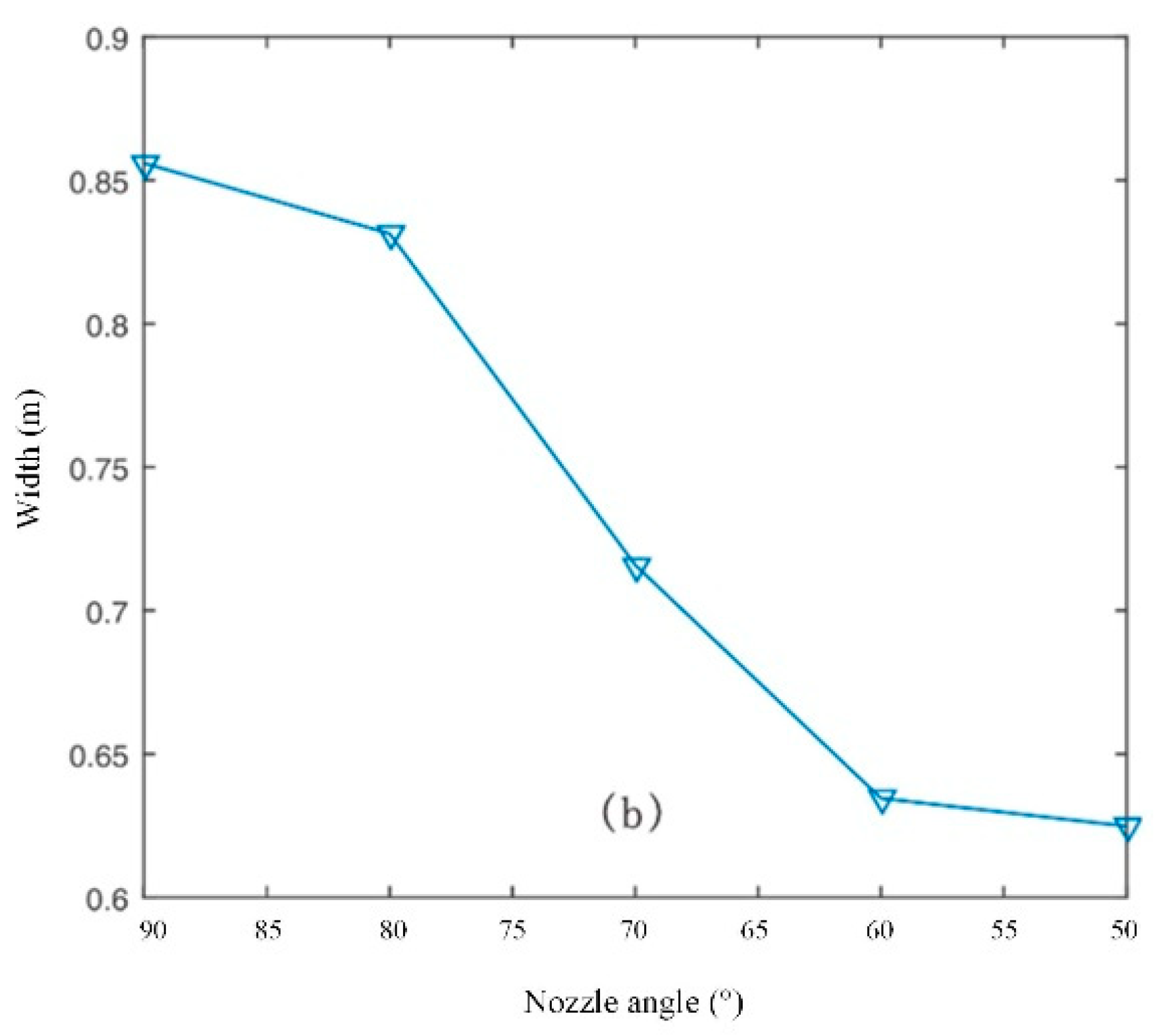
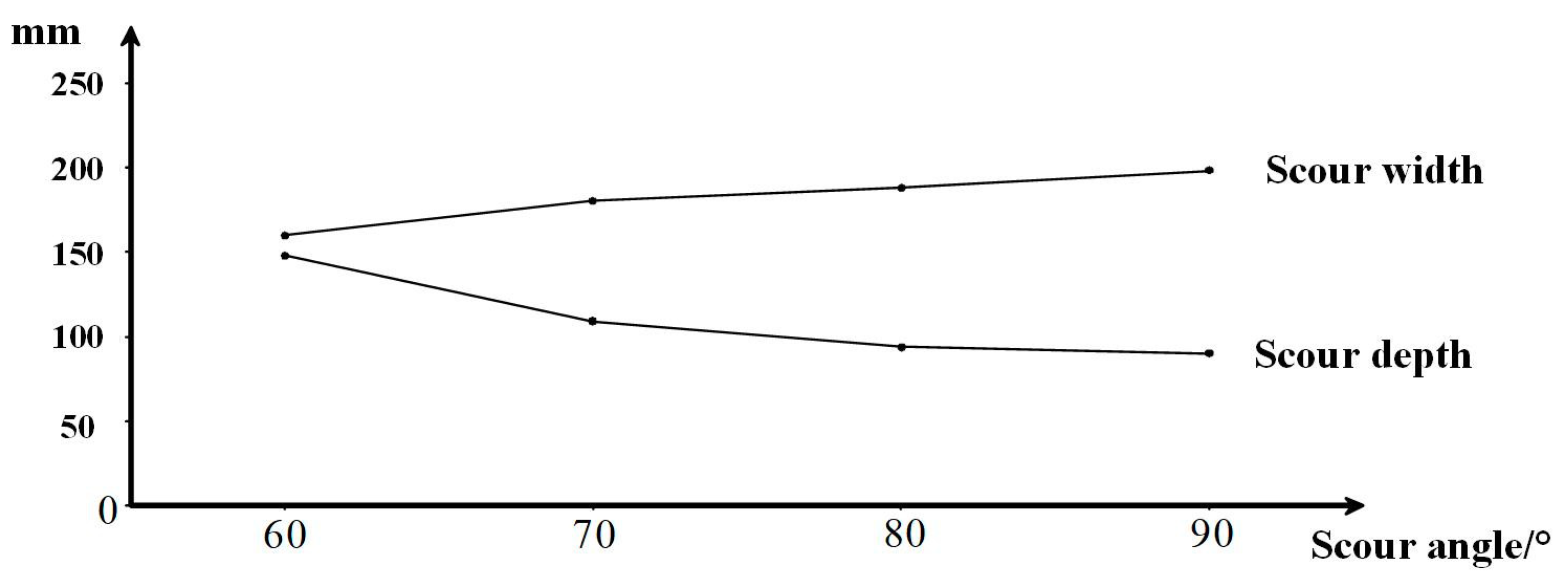
3.2.3. Influence of Jet Angle on Jet Flow Effect
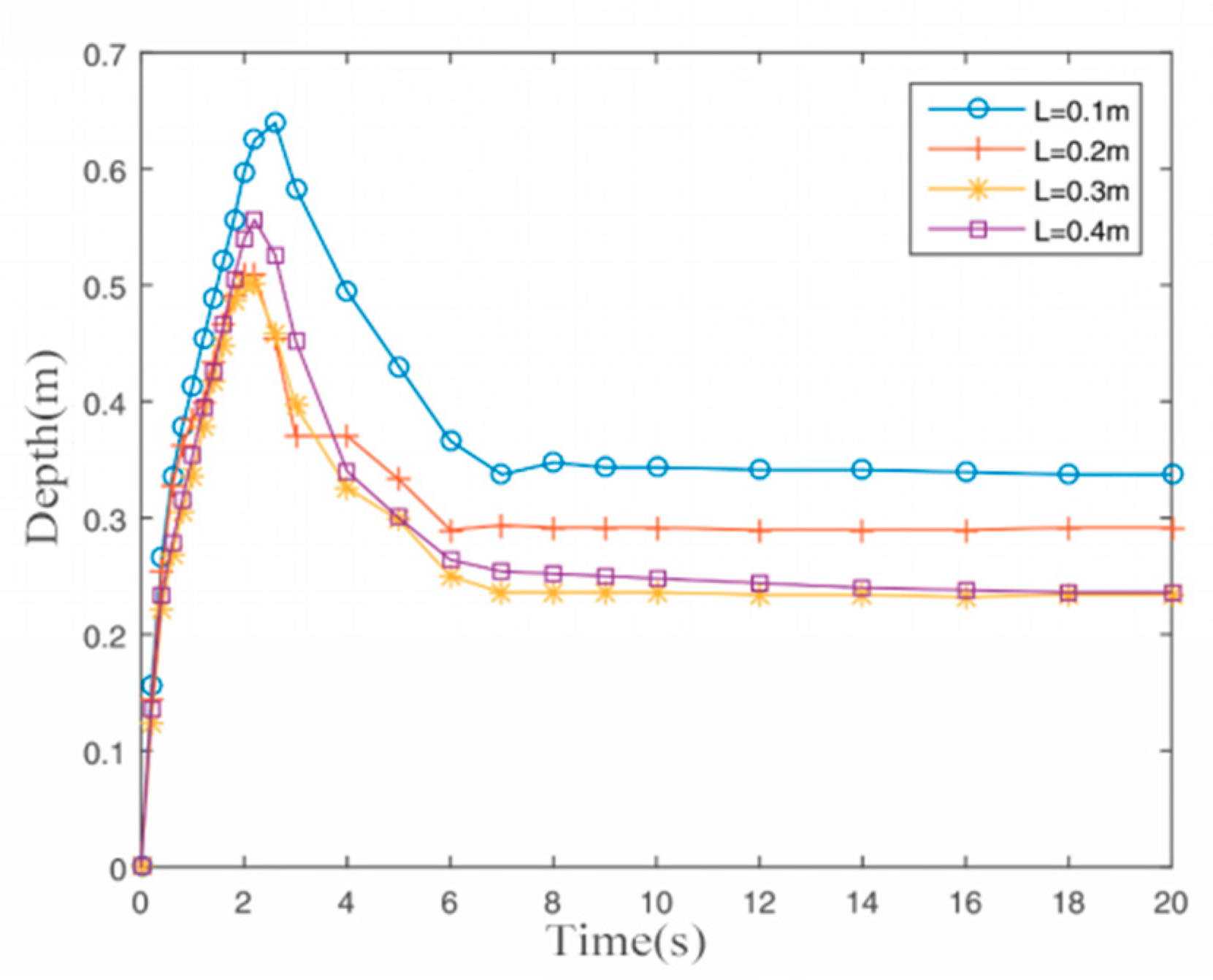
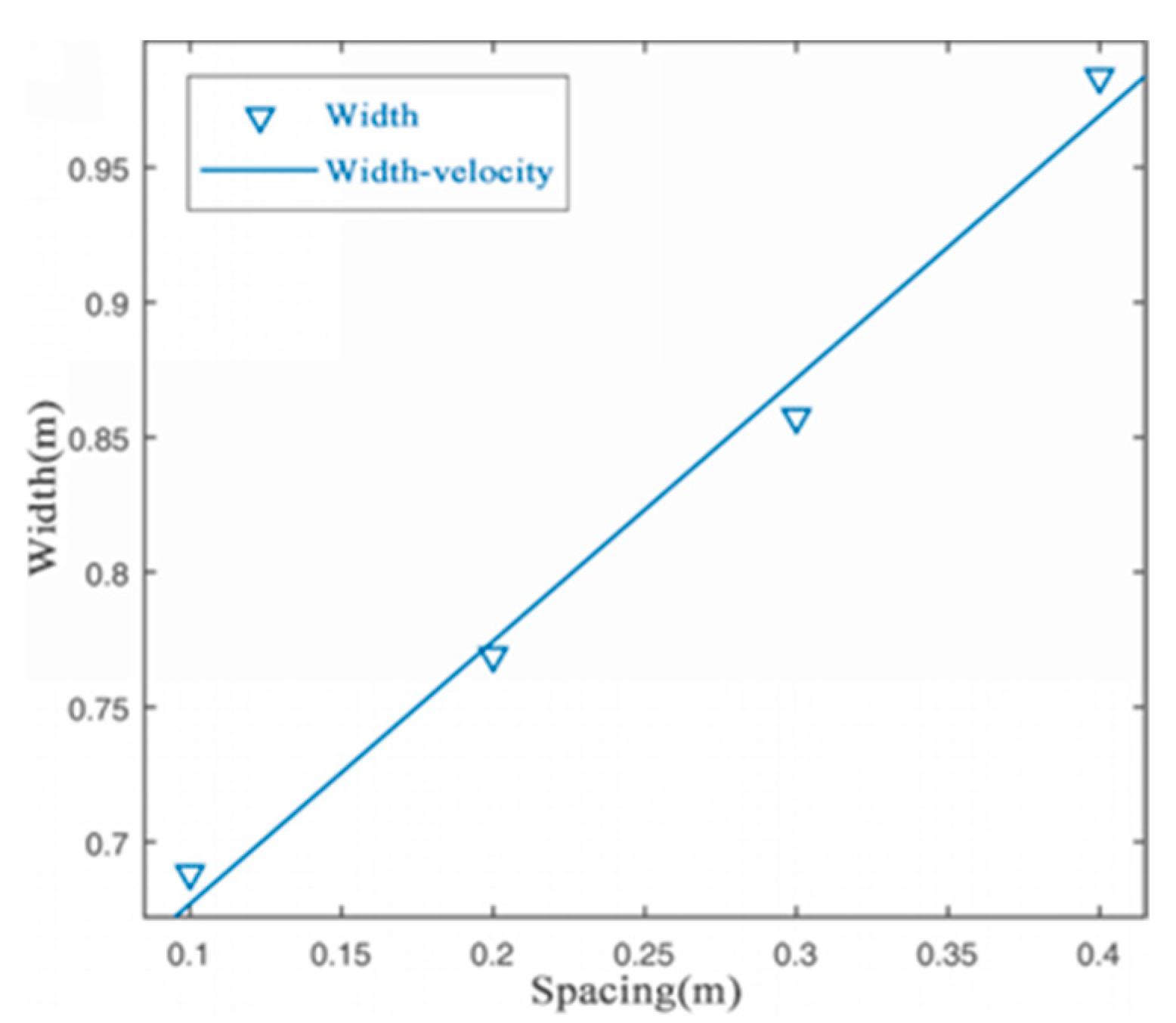
3.2.4. Influence of Jet Spacing on Jet Flow Effect
4. Experiment Analysis
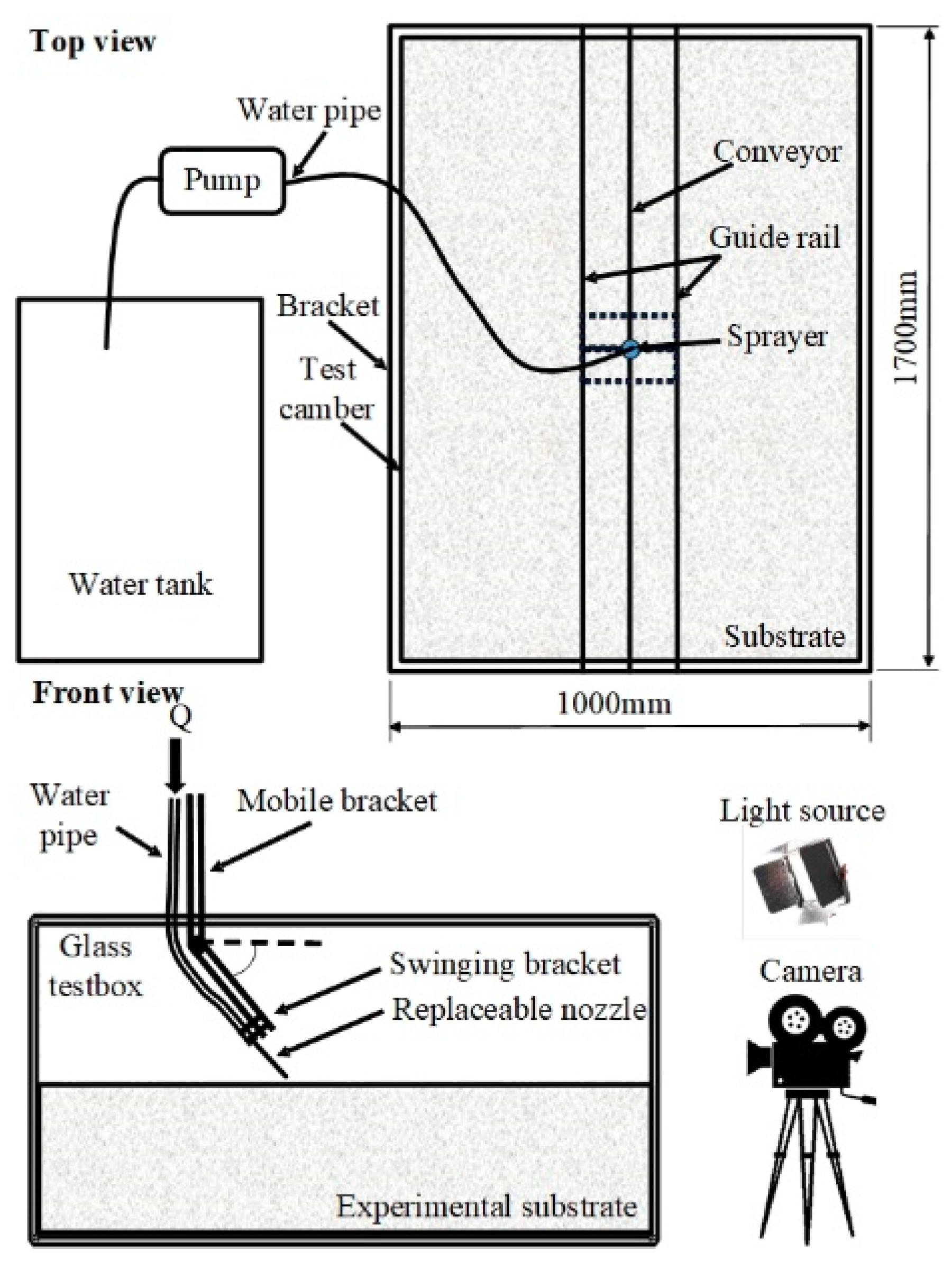
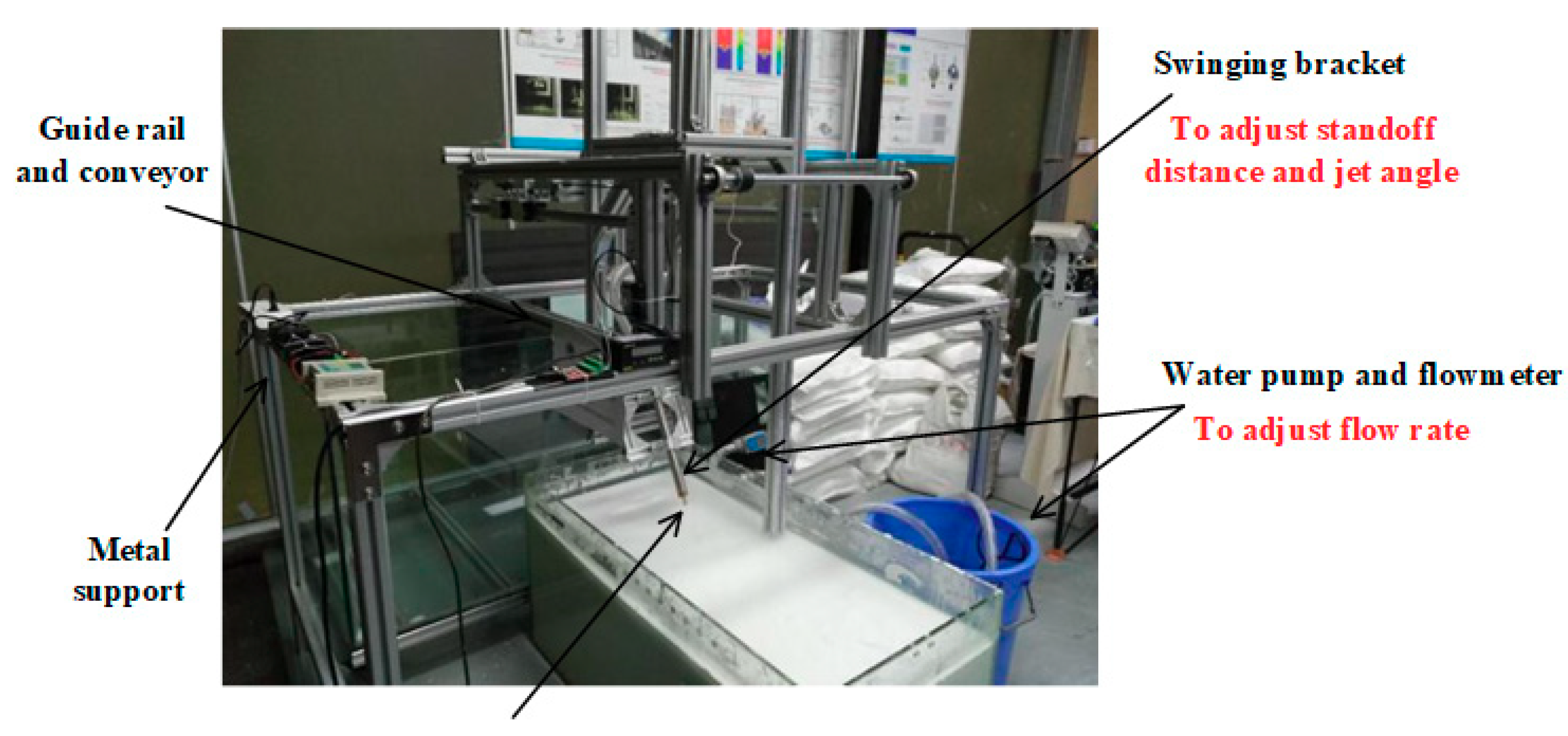
4.1. Design of Experiment Platform
4.2. Experimental Results
4.2.1. Static Scouring Experiment
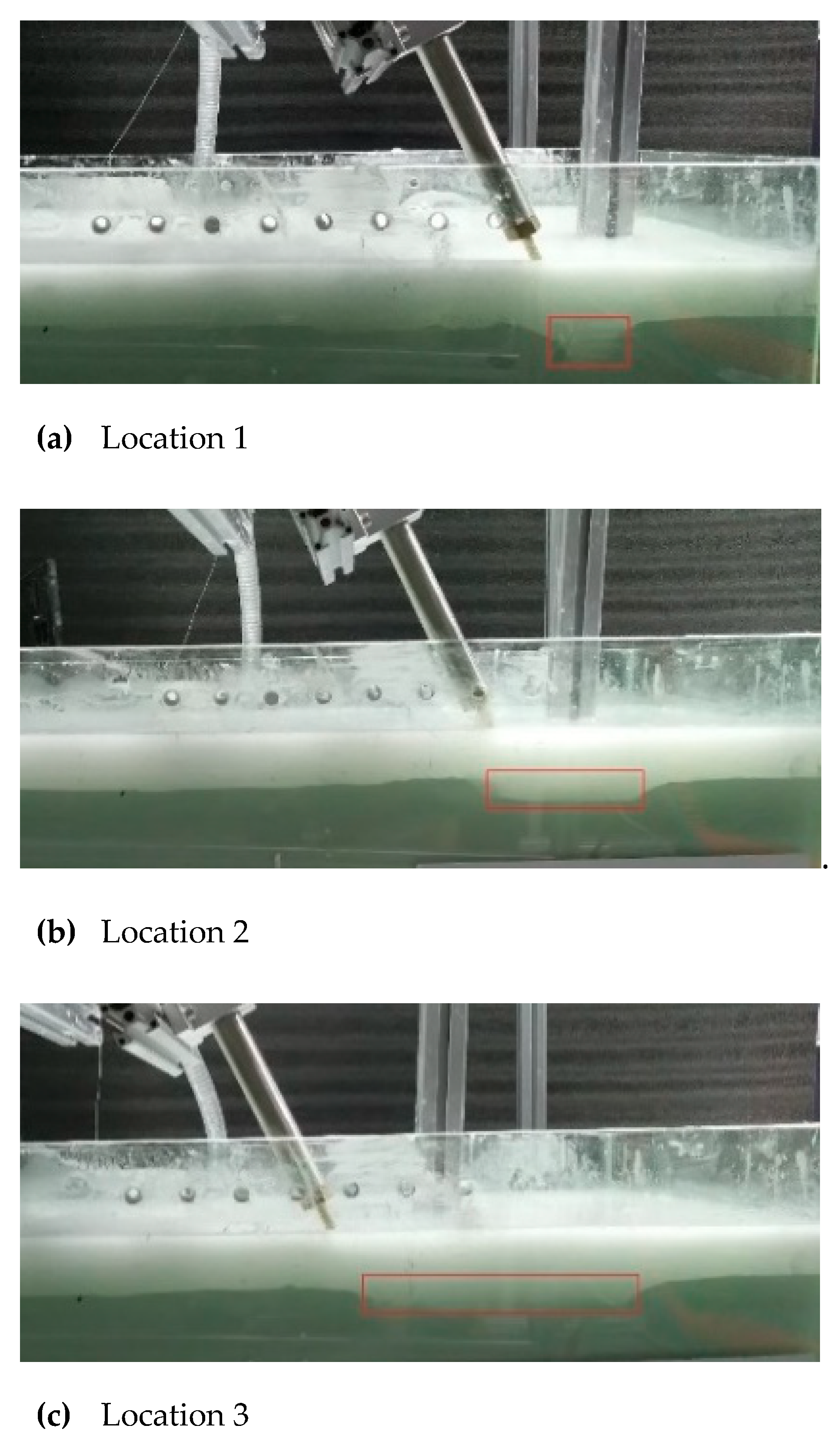
4.2.2. Dynamic Scouring Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mei, X.; He, C.; Huang, X. Study on sea surface monitoring scheme of submarine cable routing in Hainan Networking Project. China Water Transp. 2011, 11, 86–87. [Google Scholar]
- Szyrowski, T.; Sharma, S.; Sutton, R.; A Kennedy, G. Developments in subsea power and telecommunication cables detection: Part 2—Electromagnetic detection. Underw. Technol. 2013, 31, 133–143. [Google Scholar] [CrossRef]
- Carter, L.; Gavey, R.; Talling, P.; Liu, J. Insights into Submarine Geohazards from Breaks in Subsea Telecommunication Cables. Oceanography 2014, 27, 58–67. [Google Scholar] [CrossRef]
- Negishi, Y.; Ishihara, K.; Murakami, Y.; Yoshizawa, N. Design of Deep-Sea Submarine Optical Fiber Cable. IEEE J. Sel. Areas Commun. 1984, 2, 879–885. [Google Scholar] [CrossRef]
- Zajac, E.E. Dynamics and Kinematics of the Laying and Recovery of Submarine Cable. Bell Syst. Tech. J. 1957, 36, 1129–1207. [Google Scholar] [CrossRef]
- Choi, J.K.; Yokobiki, T.; Kawaguchi, K. Automated cable-laying system rov-based installation of donet2 ocean floor observatory. Sea Technol. 2015, 56, 43–55. [Google Scholar]
- Kurashima, T.; Horiguchi, T.; Yoshizawa, N.; Tada, H.; Tateda, M. Measurement of distributed strain due to laying and recovery of submarine optical fiber cable. Appl. Opt. 1991, 30, 334–337. [Google Scholar] [CrossRef]
- Prpi-Ori, J.; Nabergoj, R. Nonlinear dynamics of an elastic cable during laying operations in rough sea. Appl. Ocean. Res. 2005, 27, 255–264. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.; Ji, D.H.; Jeong, S.-K.; Kim, J.Y. A study on an up-milling rock crushing tool operation of an underwater tracked vehicle. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2019, 233, 283–300. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.-S.; Kim, J.Y.; Tran, N.H. A study on an underwater tracked vehicle with a ladder trencher. Ocean Eng. 2016, 127, 90–102. [Google Scholar] [CrossRef]
- Vu, M.T.; Jeong, S.-K.; Choi, H.-S.; Oh, J.-Y.; Ji, D.-H. Study on down-cutting ladder trencher of an underwater construction robot for seabed application. Appl. Ocean Res. 2018, 71, 90–104. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.-S.; Nguyen, N.D.; Kim, S.-K. Analytical design of an underwater construction robot on the slope with an up-cutting mode operation of a cutter bar. Appl. Ocean Res. 2019, 86, 289–309. [Google Scholar] [CrossRef]
- Aderibigbe, O.; Rajaratnam, N. Erosion of loose beds by submerged circular impinging vertical turbulent jets. J. Hydraul. Res. 1996, 34, 19–33. [Google Scholar] [CrossRef]
- Beltao, S.; Rajaratnam, N. Impinging circular turbulent jets. J. Hydraul. Div. 1974, 100, 1313–1328. [Google Scholar] [CrossRef]
- Beltao, S.; Rajaratnam, N. Impinging of axisymmentric developing jets. J. Hydraul. Div. 1977, 15, 311–326. [Google Scholar] [CrossRef]
- Qi, M.; Fu, R.; Chen, Z. Study on equilibrium scour depth of impinging jet. J. Hydrodyn. 2005, 20, 368–372. [Google Scholar]
- Li, F.; Du, J.; Shi, X.; Guo, W.; Wang, J. Research on the mechanism of hydraulic jet soil-breaking and its engineering application. Fluid Machinery. 1997, 25, 26–29. [Google Scholar]
- Kochin, N.E.; Kibel, I.A.; Roze, N.V.; Boyanovitch, D.; Radok, J.R.M.; Talbot, L. Theoretical Hydromechanics. Phys. Today 1966, 19, 76. [Google Scholar] [CrossRef]
- Fursikov, A.V.; Vishi, M.I. Mathematical problems of statistical hydromechanics. Math. It’s Appl. 1988, 39, 620–622. [Google Scholar]
- Einstein, H.A. The Bed-Load Function for Sediment Transportation in Open Channel Flows; US Department of Agriculture: Washington, DC, USA, 1950; pp. 12–35.
- Engelund, F.; Fredsøe, J. A Sediment Transport Model for Straight Alluvial Channels. Hydrol. Res. 1976, 7, 293–306. [Google Scholar] [CrossRef]
- Drew, D.A. Averaged Field Equations for Two-Phase Media. Stud. Appl. Math. 1971, 50, 133–166. [Google Scholar] [CrossRef]
- Ishii, M. Thermo-Fluid Dynamics Theory of Two-Phase Flow; Eyrolles: Paris, France, 1975; pp. 107–110. [Google Scholar]
- Enwald, H.; Peirano, E.; Almstedt, A.E. Eulerian two-phase flow theory applied to fluidization. Int. J. Multiph. Flow 1996, 22, 21–66. [Google Scholar] [CrossRef]
- Huai, W.-X.; Xue, W.-Y.; Qian, Z. Numerical Simulation of Sediment-Laden Jets in Static Uniform Environment using Eulerian Model. Eng. Appl. Comput. Fluid Mech. 2012, 6, 504–513. [Google Scholar] [CrossRef][Green Version]
- Xue, W.-Y.; Huai, W.-X.; Li, Z.-W.; Zeng, Y.-H.; Qian, Z.; Yang, Z.-H.; Zhi-Wei, L.; Yu-Hong, Z.; Zhong-Hua, Y. Numerical simulation of scouring funnel in front of bottom orifice. J. Hydrodyn. 2013, 25, 471–480. [Google Scholar] [CrossRef]
- Mih, W.C.; Kabir, J. Impingement of water jets on non-uniform stream bed. J. Hydraul. Eng. 1983, 109, 536–548. [Google Scholar] [CrossRef]
- Bao, J.; Zhou, T.; Huang, M.; Hou, Z.; Perkins, W.; Harding, S.; Titzler, S.; Hammond, G.; Ren, H.; Thorne, P.; et al. Modulating factors of hydrologic exchanges in a large-scale river reach: Insights from three-dimensional computational fluid dynamics simulations. Hydrol. Process. 2018, 32, 3446–3463. [Google Scholar] [CrossRef]
- Ling, B.; Bao, J.; Oostrom, M.; Battiato, I.; Tartakovsky, A.M. Modeling variability in porescale multiphase flow experiments. Adv. Water Resour. 2017, 105, 29–38. [Google Scholar] [CrossRef]
- Aderibigbe, O.; Rajaratnam, N. Effect of Sediment Gradation on Erosion by Plane Turbulent Wall Jets. J. Hydraul. Eng. 1998, 124, 1034–1042. [Google Scholar] [CrossRef]
- Rajaratnam, N.; Mazurek, K.A. Erosion of Sand by Circular Impinging Water Jets with Small Tailwater. J. Hydraul. Eng. 2003, 129, 225–229. [Google Scholar] [CrossRef]
- Ansari, S.A.; Kothyari, U.C.; Raju, K.G.R. Influence of Cohesion on Scour under Submerged Circular Vertical Jets. J. Hydraul. Eng. 2003, 129, 1014–1019. [Google Scholar] [CrossRef]
- Ozan, A.Y.; Yüksel, Y. Simulation of a 3D submerged jet flow around a pile. Ocean Eng. 2010, 37, 819–832. [Google Scholar] [CrossRef]
- Lei, G.U.; Yan, N.I.; Jiali, H.; Fusheng, N.I. Experimental study on the sand scouring by submerged vertical plane jet. Yellow River 2019, 41, 38–43. [Google Scholar]
- Roulund, A.; Sumer, B.M.; Fredsøe, J.; Michelsen, J. Numerical and experimental investigation of flow and scour around a circular pile. J. Fluid Mech. 2005, 534, 351–401. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Parameters | Value |
|---|---|
| shear strength τf | 54 kPa |
| critical pressure of failure surface Fcr | 0.23 MPa |
| soil particles limited size d60 | 1.2 mm |
| density ρ | 2560 kg/m3 |
| turbulent Prandtl number Pr | 0.9 |
| particle distribution size (Sauter average diameter) | 1 mm |
| Related Parameters | Experimental Prototype | Simulation Parameters (Engineering Embedding Machine) |
|---|---|---|
| scale factor | 1 | 10 |
| nozzle diameter | 6 mm | 60 mm |
| jet flow rate | (1.61–10.73) × 10−3 m3/min | (0.509–3.393) m3/min |
| jet standoff distance | 0–140 mm | 0–1400 mm |
| jet angle | 0–90° | 0–90° |
| shear strength of soil | 5.4 kPa | 54 kPa |
| Parameters | Value |
|---|---|
| scour angle | 90° |
| jet standoff distance | 30 mm |
| scour flow rate | 3.75 × 10−3 m3/min |
| nozzle diameter | 6 mm |
| Nozzle Diameters | Scour Depth (mm) | Scour Width (mm) | ||
|---|---|---|---|---|
| Simulation | Experiment | Simulation | Experiment | |
| 60 mm/6 mm | 193.23 | 198 | 84.24 | 78 |
| Working Condition | Flow Rate (×10−3 m3/min) | Nozzle Diameter (mm) | Standoff Distance (mm) | Angle (°) | Scouring Width (mm) | Scouring Depth (mm) |
|---|---|---|---|---|---|---|
| 1 | 3.75 | 6 | 0 | 90 | 63.3 | 229.5 |
| 2 | 3.75 | 6 | 10 | 90 | 68.1 | 221.7 |
| 3 | 3.75 | 6 | 20 | 90 | 73.5 | 210.3 |
| 4 | 3.75 | 6 | 30 | 90 | 89.5 | 196.8 |
| 5 | 3.75 | 6 | 40 | 90 | 111.3 | 177.1 |
| 6 | 3.75 | 6 | 50 | 90 | 129.3 | 147.4 |
| 7 | 3.75 | 6 | 60 | 90 | 165.2 | 116.3 |
| 8 | 3.75 | 6 | 70 | 90 | 209.4 | 77.3 |
| Working Condition | Flow Rate (×10−3 m3/min) | Nozzle Diameter (mm) | Standoff Distance (mm) | Angle (°) | Scouring Width (mm) | Scouring Depth (mm) |
|---|---|---|---|---|---|---|
| 1 | 3.75 | 6 | 30 | 90 | 159.3 | 147.6 |
| 2 | 3.75 | 6 | 30 | 80 | 180.5 | 108.4 |
| 3 | 3.75 | 6 | 30 | 70 | 187.0 | 93.0 |
| 4 | 3.75 | 6 | 30 | 60 | 197.7 | 89.3 |
| Working Condition | Flow Rate (×10−3 m3/min) | Nozzle Diameter (mm) | Standoff Distance (mm) | Angle (°) | Scouring Width (mm) | Scouring Depth (mm) |
|---|---|---|---|---|---|---|
| 1 | 1.61 | 6 | 30 | 90 | 108.5 | 74.9 |
| 2 | 2.682 | 6 | 30 | 90 | 153.1 | 83.7 |
| 3 | 3.754 | 6 | 30 | 90 | 198.0 | 89.8 |
| 4 | 5.363 | 6 | 30 | 90 | 240.1 | 108.0 |
| 5 | 6.438 | 6 | 30 | 90 | 281.7 | 134.6 |
| 6 | 8.048 | 6 | 30 | 90 | 291.1 | 174.1 |
| 7 | 10.73 | 6 | 30 | 90 | 290.4 | 218.9 |
| Working Condition | Flow Rate (×10−3 m3/min) | Nozzle Diameter (mm) | Standoff Distance (mm) | Moving Speed (mm/s) | Angle (°) |
|---|---|---|---|---|---|
| 1 | 3.75 | 6 | 30 | 10 | 90 |
| 2 | 3.75 | 6 | 30 | 20 | 90 |
| 3 | 3.75 | 6 | 30 | 30 | 60 |
| 4 | 3.75 | 6 | 30 | 30 | 90 |
| 5 | 3.75 | 6 | 30 | 41.7 | 60 |
| Curve | Fitting Function |
|---|---|
| depth–velocity | f(x) = 0.0015x2.071 + 0.0572 |
| width–velocity | f(x) = 0.4808x0.2559 |
| depth–standoff distance | f(x) = 0.047x−1.365 |
| width–standoff distance | f(x) = 0.2671x−0.9791 |
| depth–nozzle spacing | f(x) = 0.974x + 0.58 |
| depth–jet angle | f(x) = 0.0025x + 0.235 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Cao, C.; Ge, Y.; He, J.; Yu, Z.; Chen, J.; Zheng, X. Research on Improving the Working Efficiency of Hydraulic Jet Submarine Cable Laying Machine. J. Mar. Sci. Eng. 2021, 9, 745. https://doi.org/10.3390/jmse9070745
Lu Z, Cao C, Ge Y, He J, Yu Z, Chen J, Zheng X. Research on Improving the Working Efficiency of Hydraulic Jet Submarine Cable Laying Machine. Journal of Marine Science and Engineering. 2021; 9(7):745. https://doi.org/10.3390/jmse9070745
Chicago/Turabian StyleLu, Zhifei, Chen Cao, Yongqiang Ge, Jiamin He, Zhou Yu, Jiawang Chen, and Xinlong Zheng. 2021. "Research on Improving the Working Efficiency of Hydraulic Jet Submarine Cable Laying Machine" Journal of Marine Science and Engineering 9, no. 7: 745. https://doi.org/10.3390/jmse9070745
APA StyleLu, Z., Cao, C., Ge, Y., He, J., Yu, Z., Chen, J., & Zheng, X. (2021). Research on Improving the Working Efficiency of Hydraulic Jet Submarine Cable Laying Machine. Journal of Marine Science and Engineering, 9(7), 745. https://doi.org/10.3390/jmse9070745