
Numerical Investigation of the Inland Transport Impact on the Bed Erosion and Transport of Suspended Sediment: Propulsive System and Confinement Effect


Abstract
1. Introduction
- Development and maintenance of channels. Dunes formed by the sediment deposits increase the risk of ships’ grounding and propulsive system damage.
- Erosion of the resistive sludge layer increases the groundwater levels in the neighboring areas (agricultural, industrial or residential), causing flooding.
- The suspended sediment can negatively impact the quality of the water by trapping elements such as metals from heavy industries. These polluted particles can accumulate on bottoms and get re-suspended due to water hydrodynamics or often re-disturbed by-passing ships, which can contribute to the transport of pollutants from a polluted area to an unpolluted area.
2. Methods
2.1. Fluid Flow Equations
2.2. Sediment Suspension Equations
2.2.1. Free-Surface Boundary Condition
2.2.2. Bottom Boundary Condition
2.3. Sediment Scaling Method
3. Results and Discussion
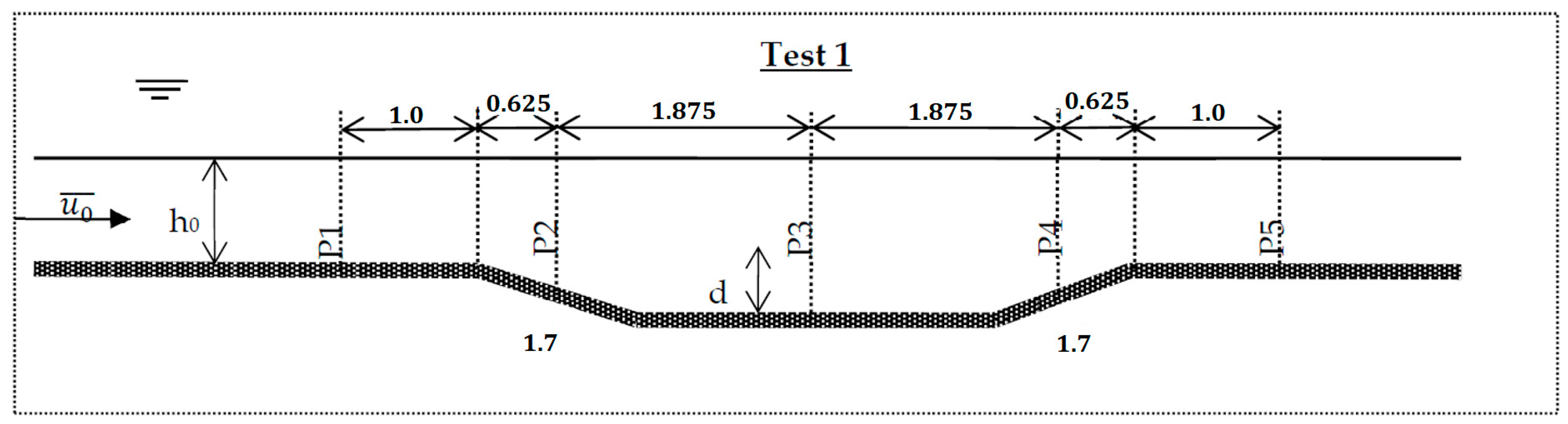
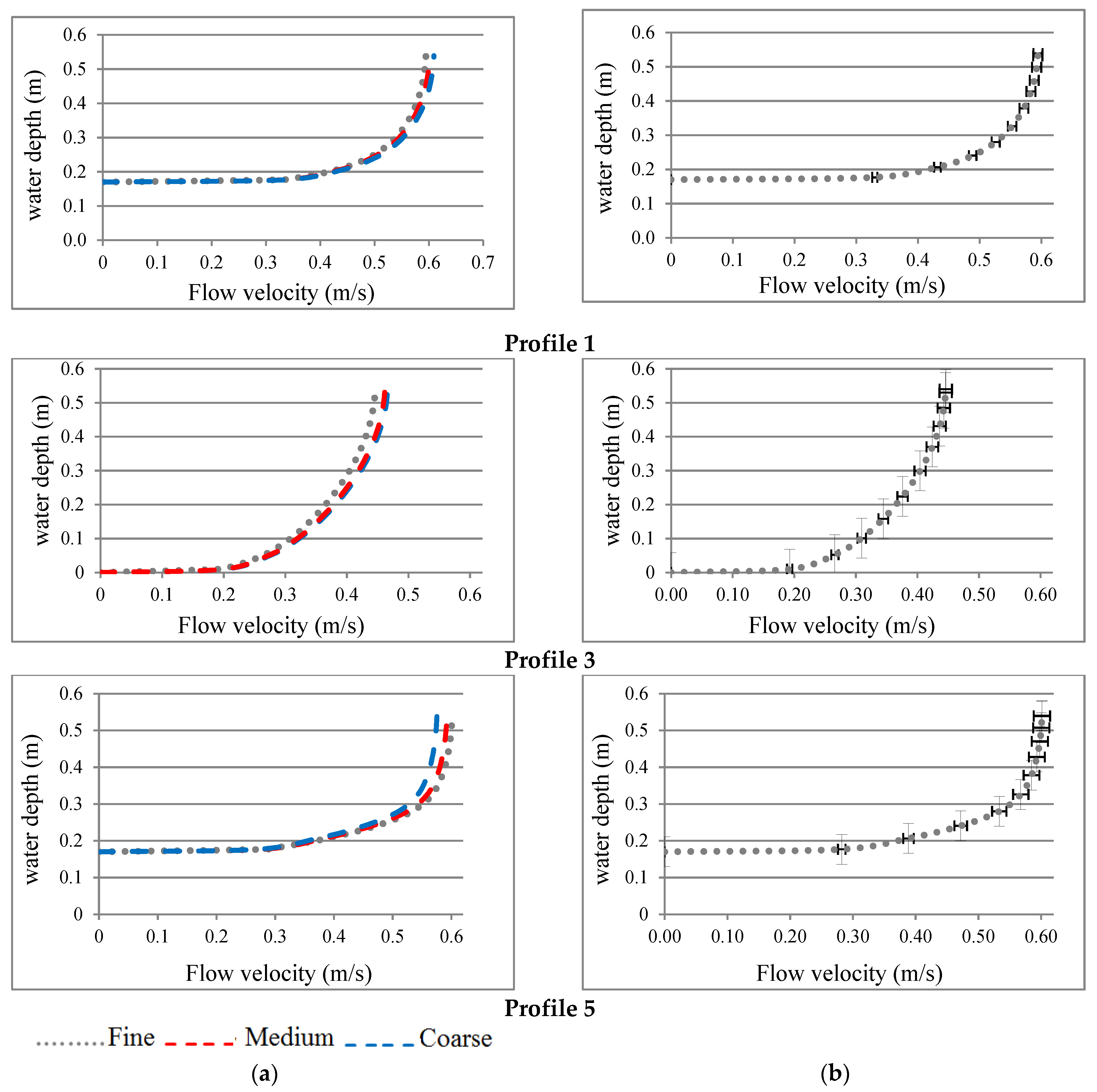
3.1. Verification and Validation of Coupled Model
- –
- 0 < Rk < 1 corresponds to monotonic convergence
- –
- Rk < 0 corresponds to oscillatory convergence
- –
- Rk > 1 corresponds to monotonic divergence
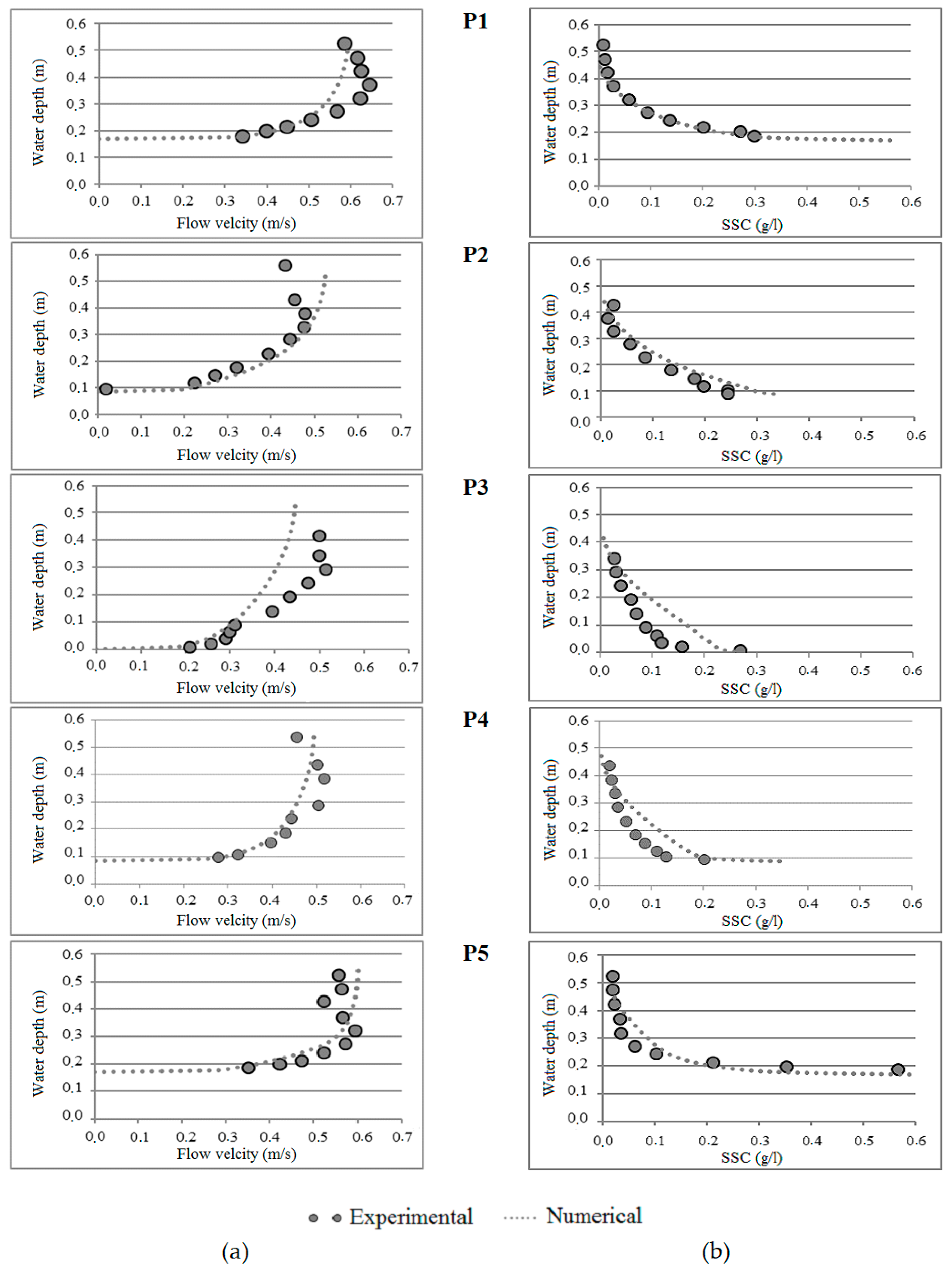
3.2. Scaling Method Validation
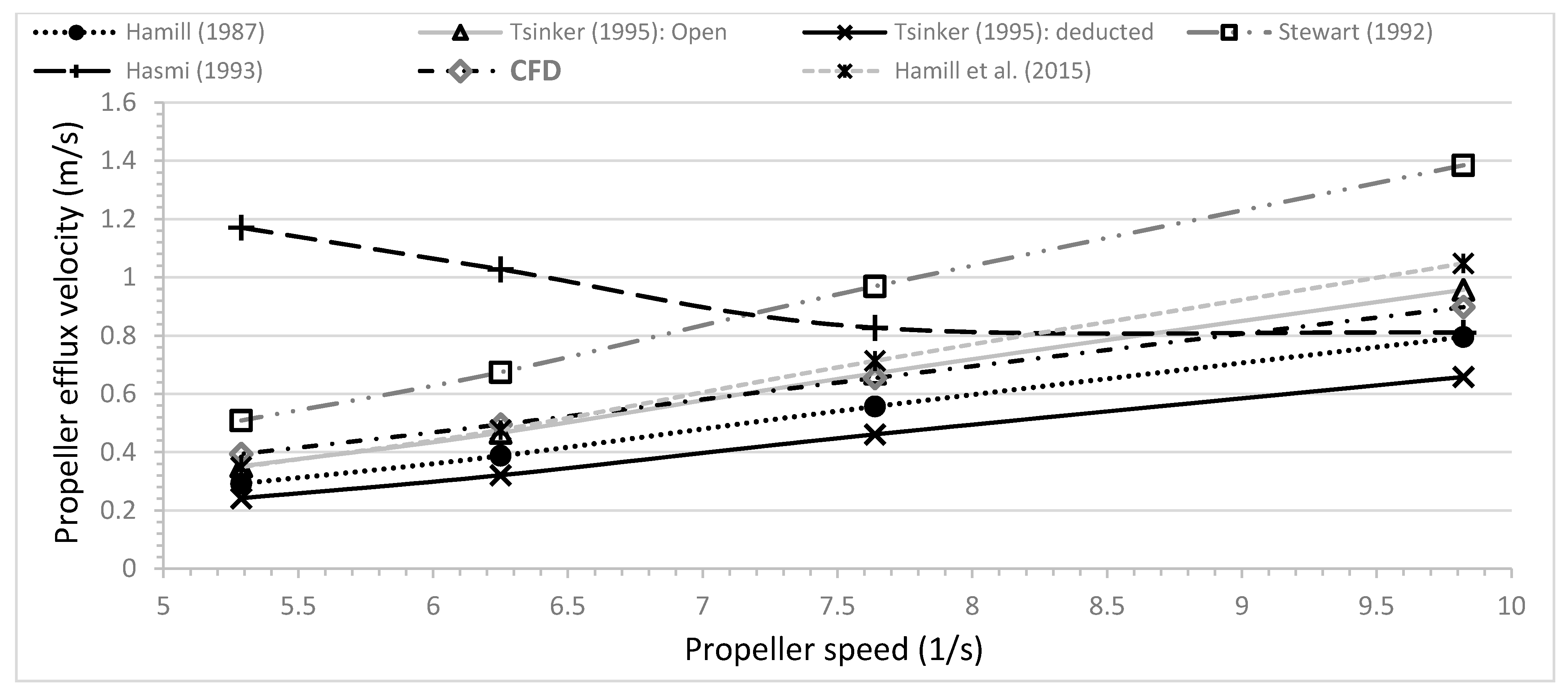
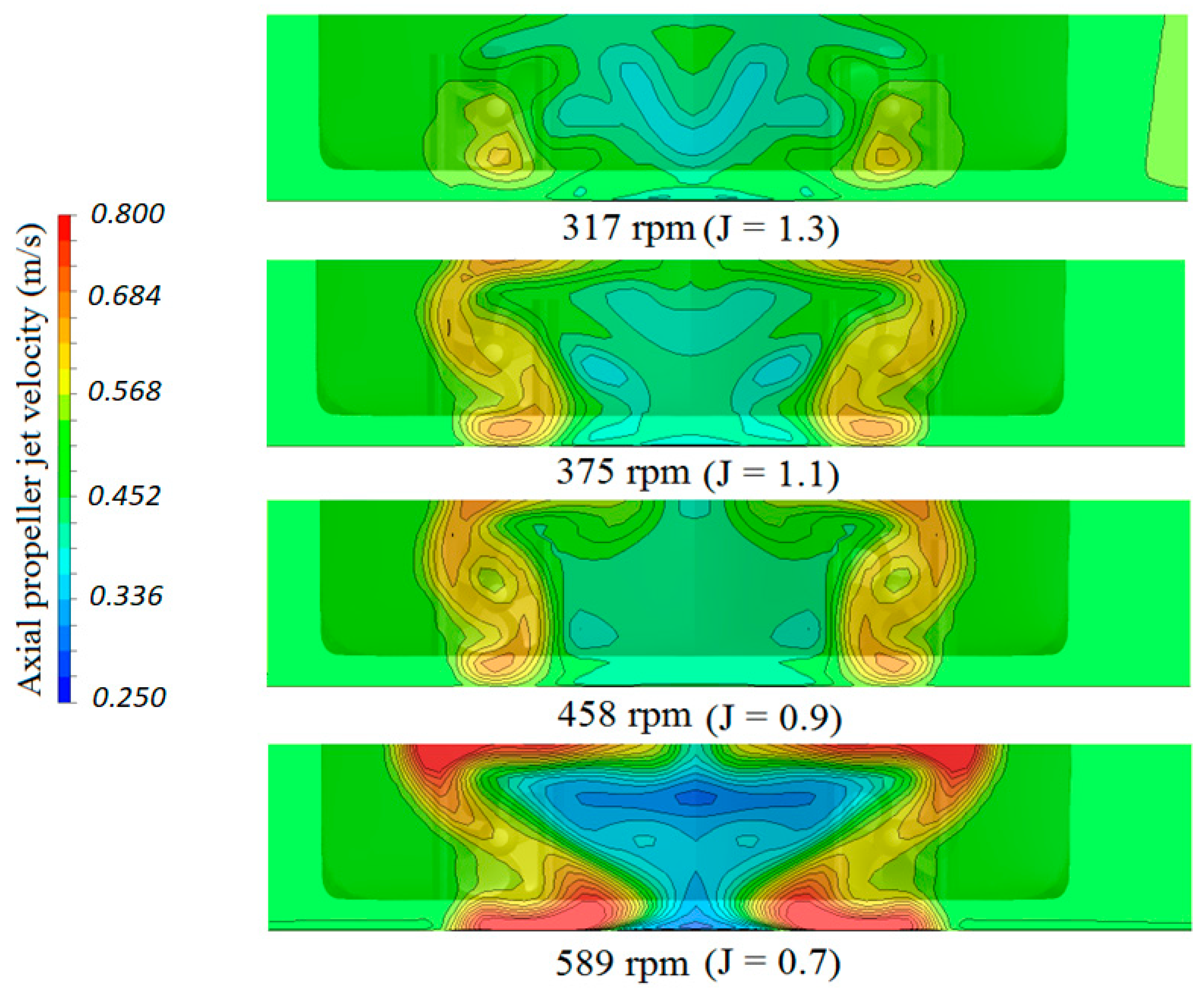
3.3. Verification of the Propeller Jet Velocity
4. Application
4.1. Ship’s Description
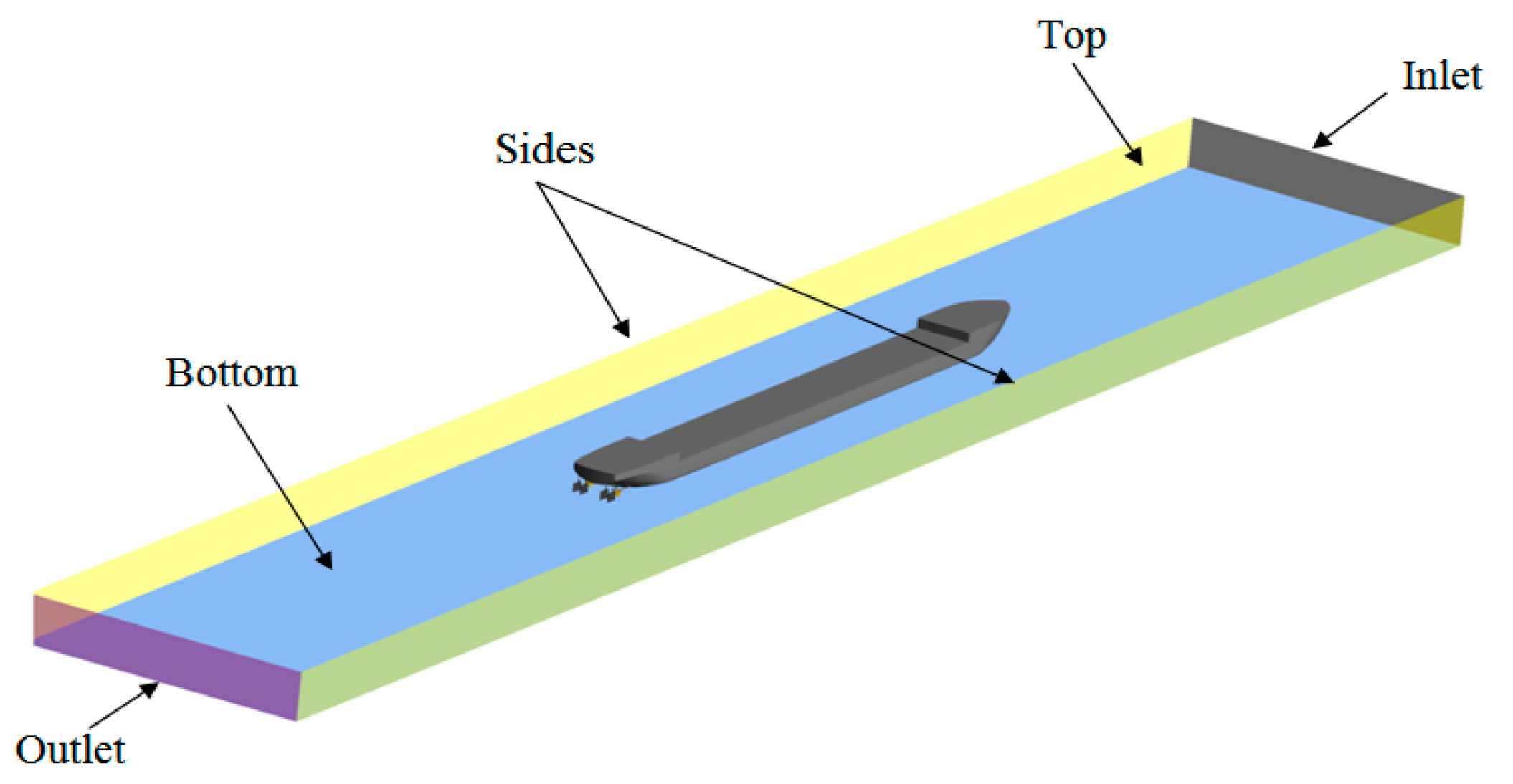
4.2. Channel Configurations and Corresponding Boundary Conditions
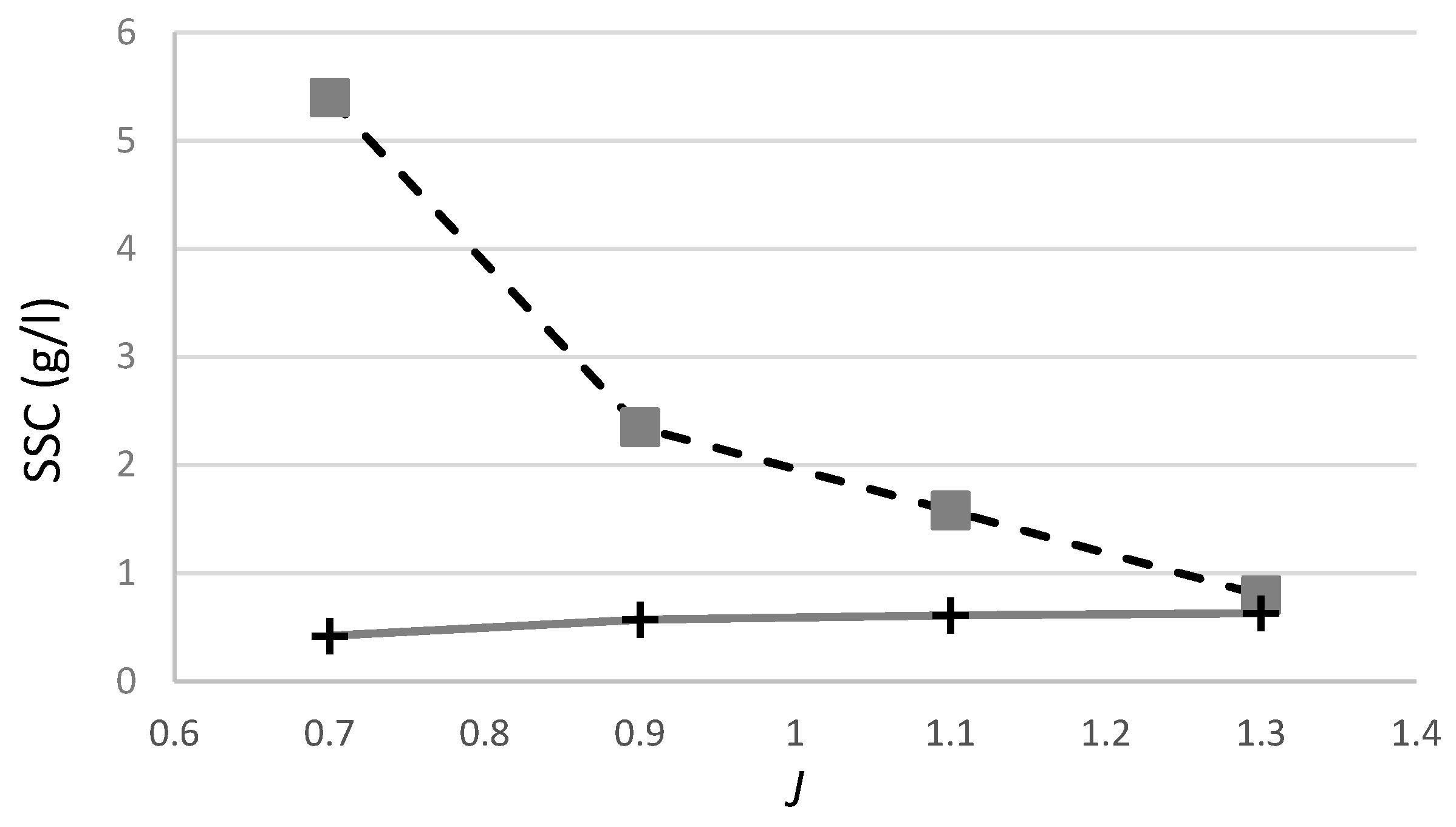
4.3. Propellers Effect on the Sediment Suspension
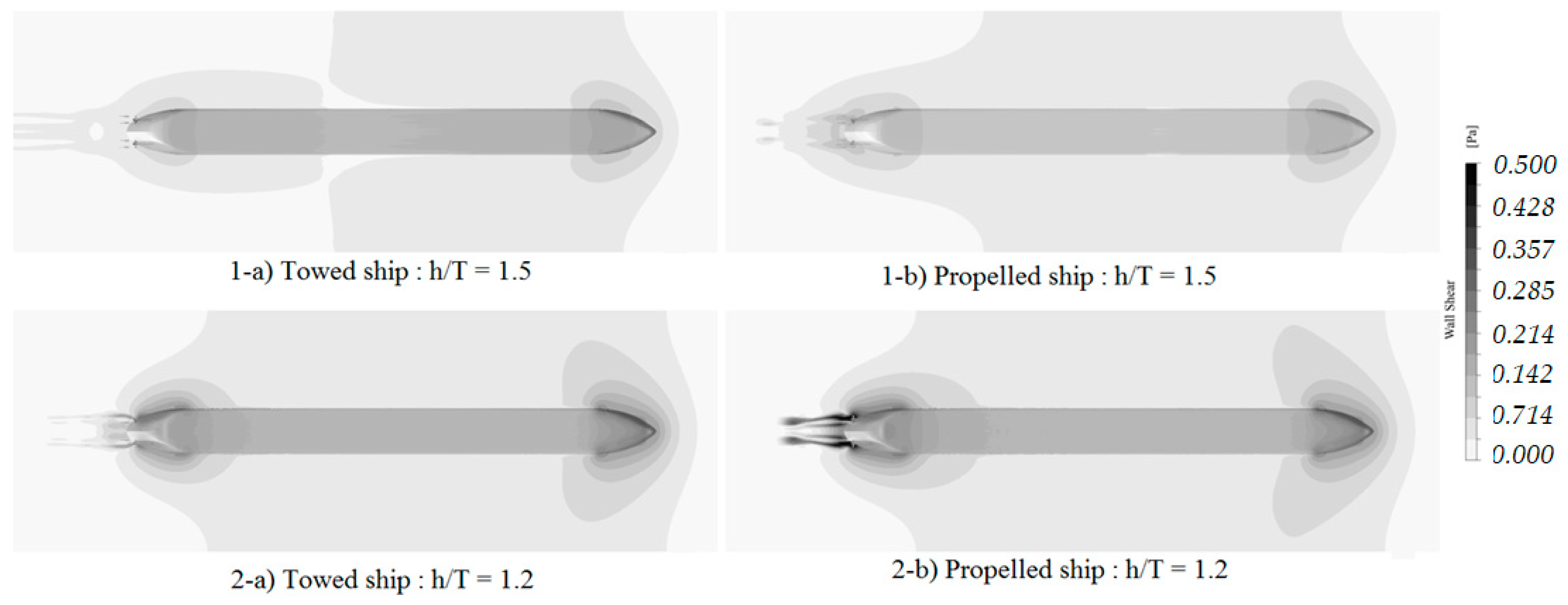
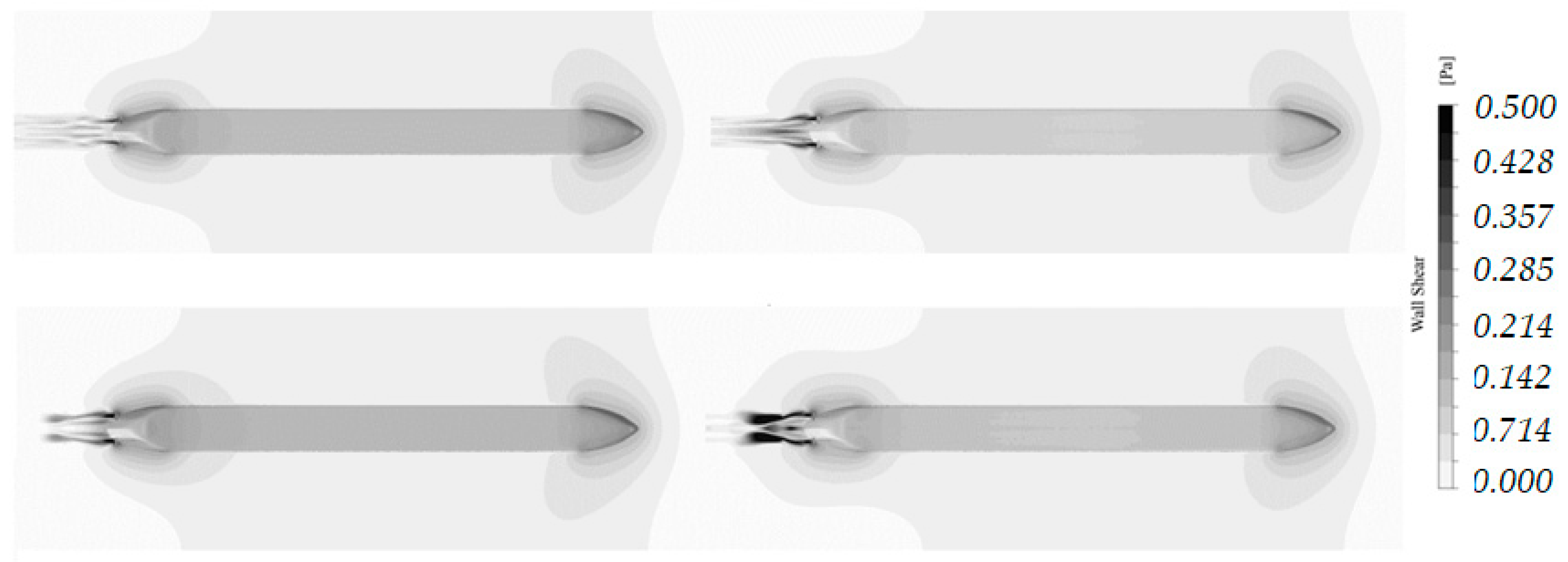
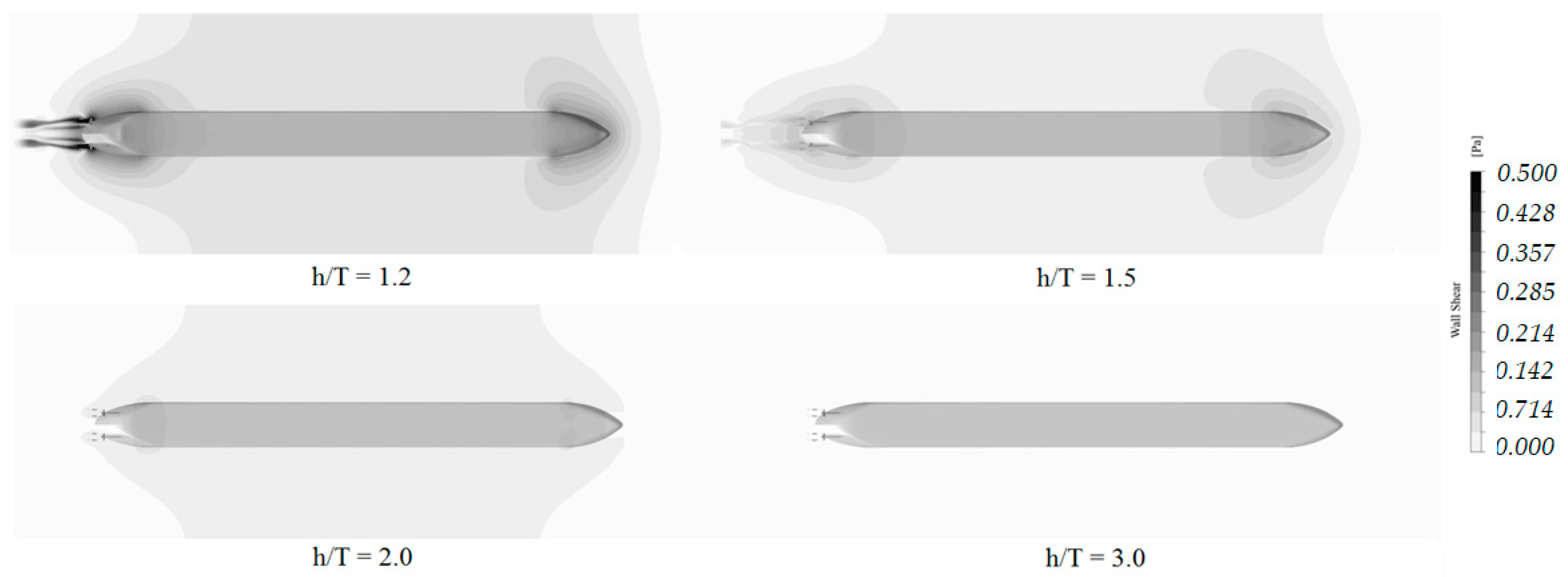
4.3.1. Propeller Jet Effect on the Bed Shear Stress
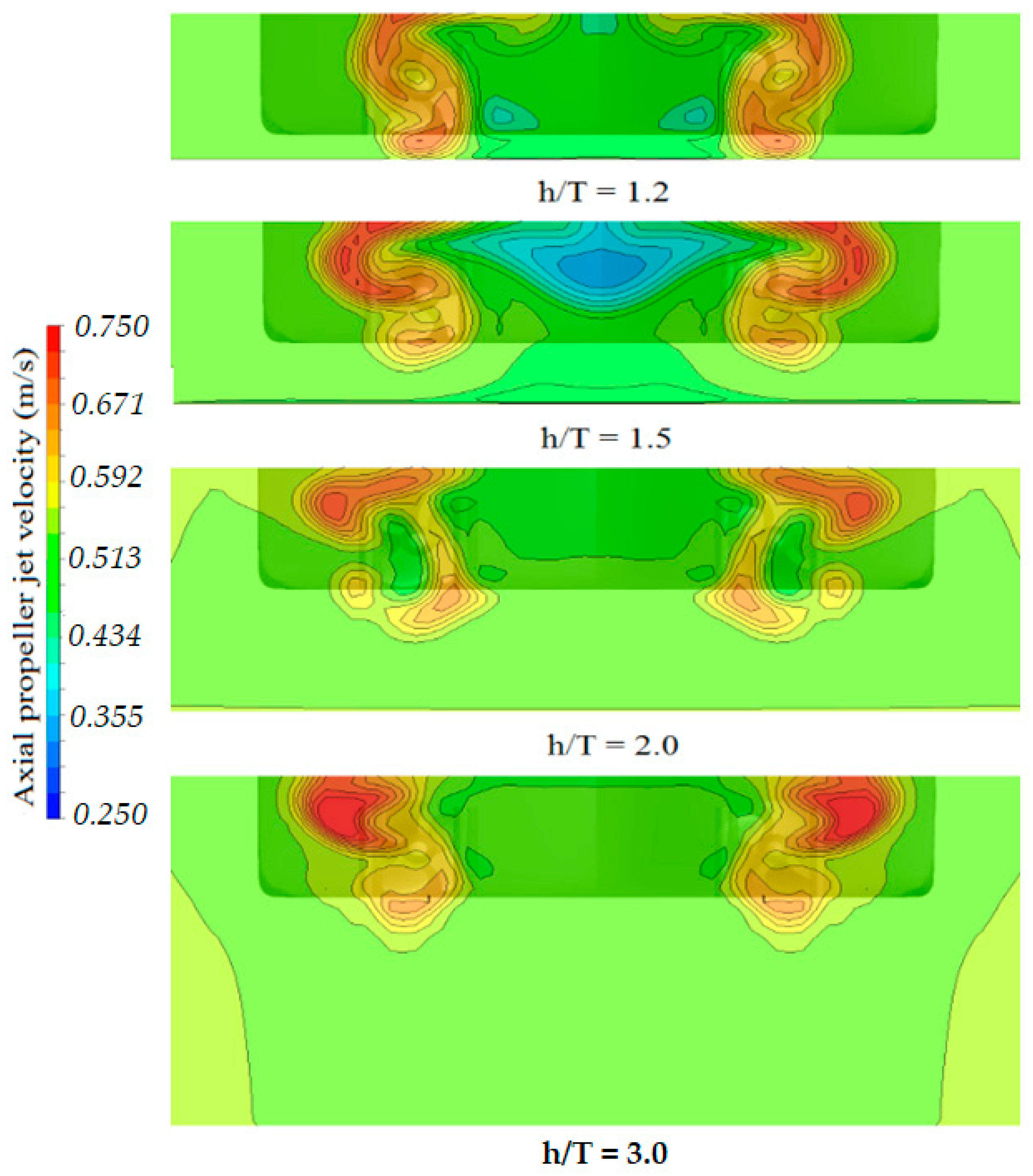
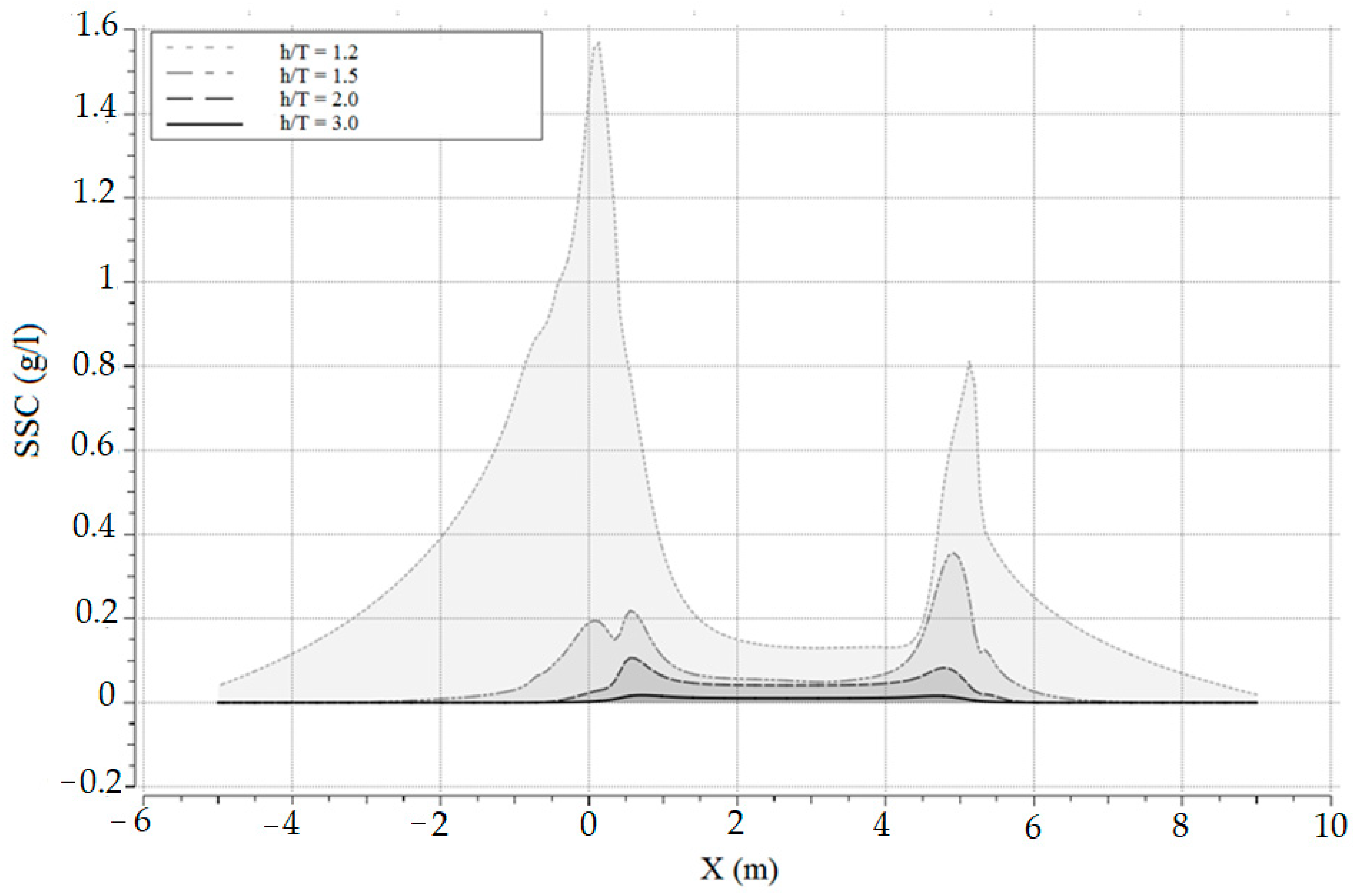
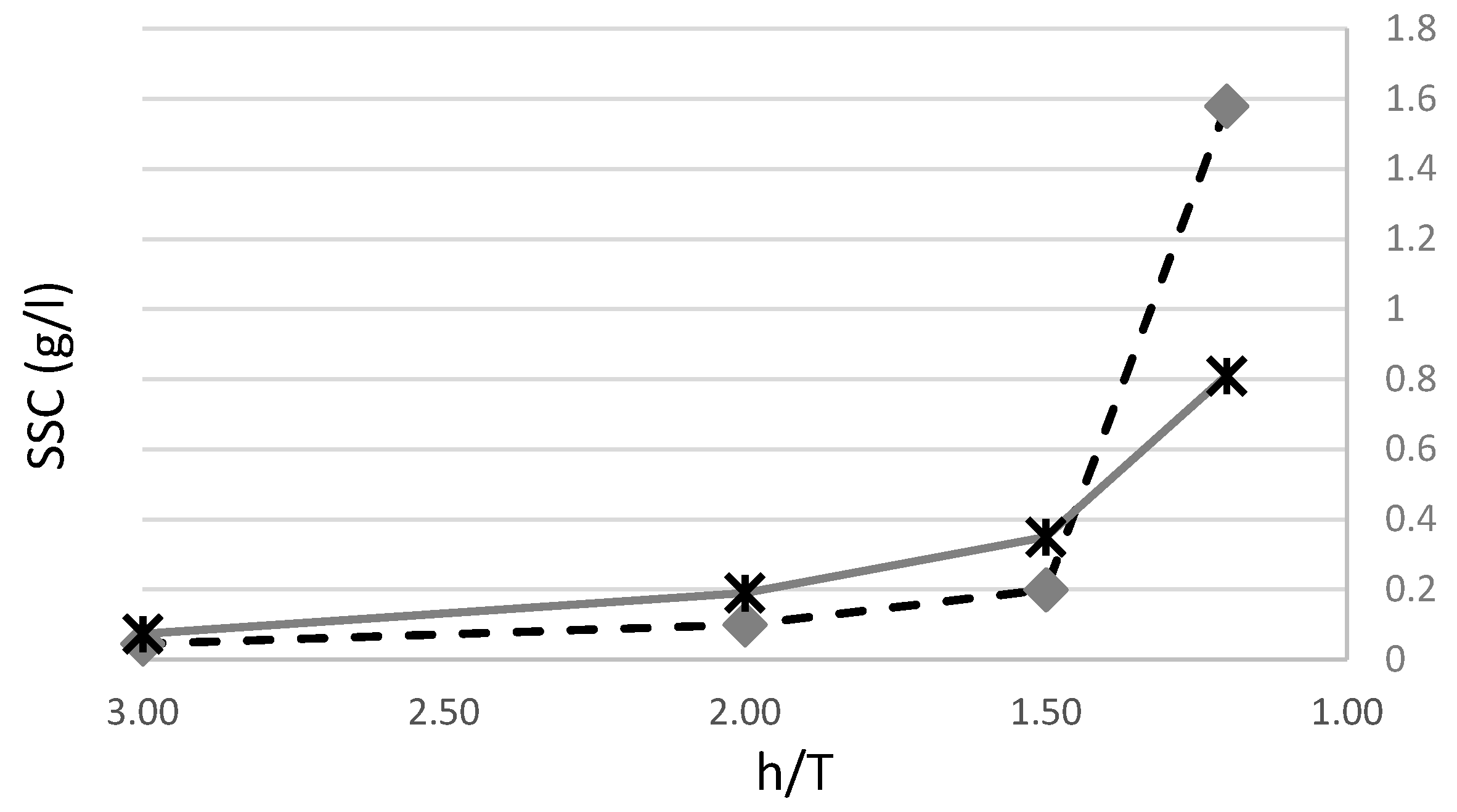
4.3.2. Confinement Effect on the Concentration of the Suspended Sediments in Inland Waterway
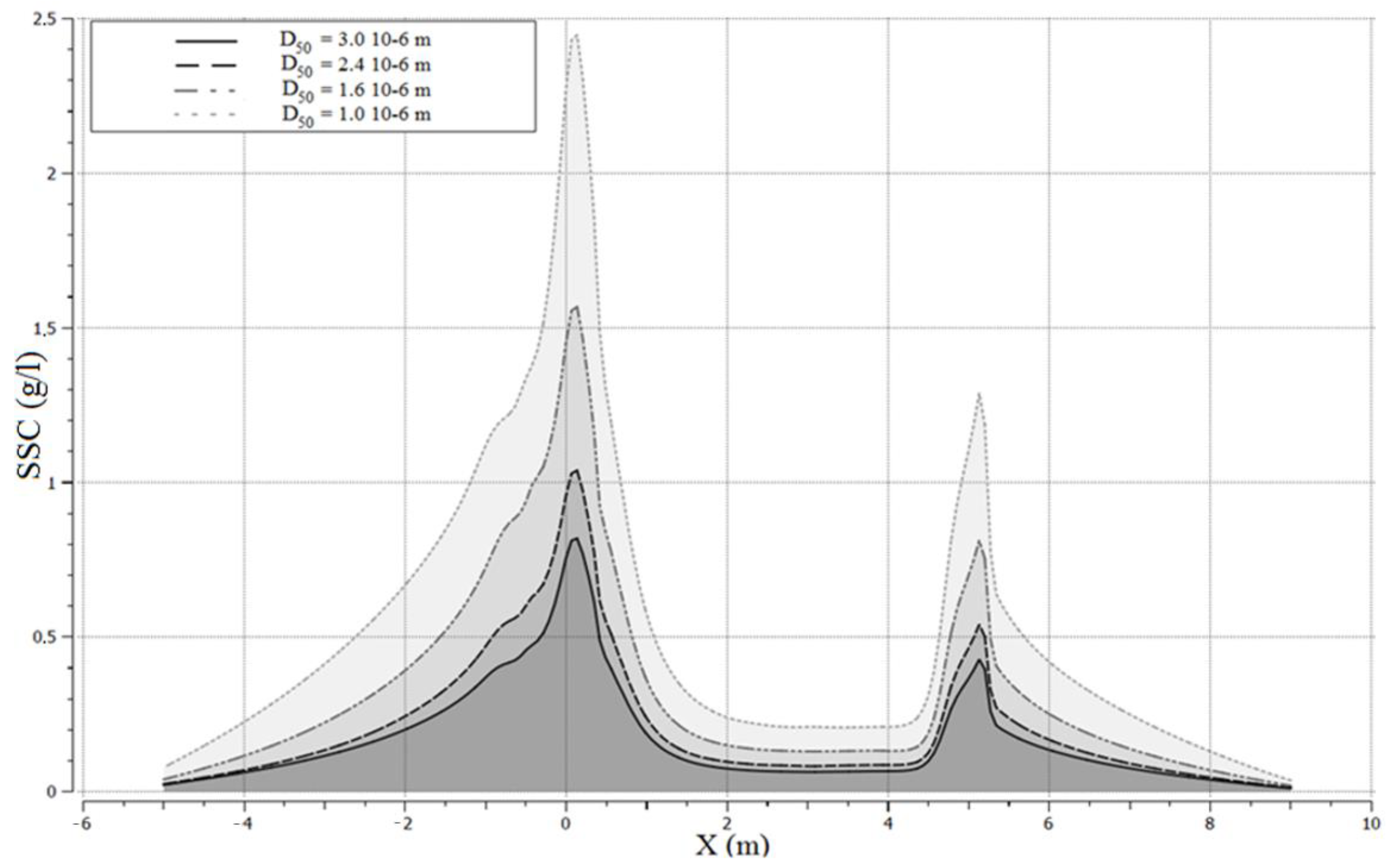
4.3.3. Influence of the Sediment Size on the SSC
5. Conclusions
- The influence of the propulsive system is significant only in shallow and confined waters. In medium and deep water, the propulsive system has not a great effect.
- The h/T ratio is the parameter that has the most influence on the SSC. This parameter is also considered as an essential parameter on which the other parameters strongly depend.
- The redius of the impacted area and the quantity of the SSC depend strongly on the sediment size. Where, the smaller the sediment size, the larger the SSC quantity and impacted area.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hamill, G.A. Characteristics of the Screw Wash of Manoeuvring Ship and the Resulting Bed Scour. Ph.D. Thesis, Queen’s University of Belfast, Northern Ireland, UK, 1987. [Google Scholar]
- Gaythwaite, J.W. Design of Marine Facilities for the Berthing, Mooring, and Repair of Vessels; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2004. [Google Scholar]
- Fuehrer, M.; Römisch, K. Propeller jet erosion and stability criteria for bottom protection of various constructions. Bull. Perm. Int. Assoc. Navig. Congr. 1977, 58, 12. [Google Scholar]
- Stewart, D.P.J. Characteristics of a Ship Screw Wash and the Influence of Quay Wall Proximity. Ph.D. Thesis, Queen’s University of Belfast, Northern Ireland, UK, 1992. [Google Scholar]
- Hasmi, H.N. Erosion of a Granular Bed at a Quay wall by a Ship’s Screw Wash. Ph.D. Thesis, Queen’s University of Belfast, Northern Ireland, UK, 1993. [Google Scholar]
- Tsinker, G.P. Marine Structures Engineering: Specialized Applications; Chapman and Hallan International Thomson Publishing Company: New York, NY, USA, 1995. [Google Scholar]
- Smaoui, H.; Ouahsine, A.; Pham, V.; van Bang, D.P.; Sergent, P.; Hissel, P. On the sediment resuspension induced by the boat traffic: From experiment to numerical modelling. In Chapter 3, Sediment Transport; Ginsberg, S.S., Ed.; InTech: Vienna, Austria, 2011; pp. 55–70. [Google Scholar]
- Parisi, J.; Turnbull, M.; Cooper, A.; Clarke, J. Ship-current interactions with TELEMAC. In Proceedings of the TELEMAC-MASCARET User Conference 2019, Toulouse, France, 15–17 October 2019. [Google Scholar]
- Brovchenko, I.; Kanarska, Y.; Maderich, V.; Terletska, K. 3D non-hydrostatic modelling of bottom stability under impact of the turbulent ship propeller jet. Acta Geophys. 2007, 55, 47–55. [Google Scholar] [CrossRef]
- Lam, W.H.; Robinson, D.J.; Hamill, G.A.; Johnston, H.T. An effective method for comparing the turbulence intensity from LDA measurements and CFD predictions within a ship propeller jet. Ocean. Eng. 2012, 52, 105–124. [Google Scholar] [CrossRef]
- Stoschek, O.; Precht, E.; Larsen, O.; Jain, M.; Yde, L.; Ohle, N.; Strotmann, T. Sediment resuspension and seabed scour induced by ship-propeller wash. In Proceedings of the PIANC Congress, San Francisco, CA, USA, 1–5 June 2014. [Google Scholar]
- Li, Y.; Ong, M.C.; Fuhrman, D.R. CFD investigations of scour beneath a submarine pipeline with the effect of upward seepage. Coast. Eng. 2020, 156, 103624. [Google Scholar] [CrossRef]
- Yazdanfar, Z.; Lester, D.; Robert, D.; Setunge, S. A novel CFD-DEM upscaling method for prediction of scour under live-bed conditions. Ocean Eng. 2021, 220, 108442. [Google Scholar] [CrossRef]
- Van Rijn, L.C. Sediment Transport, Part I: Bed Load Transport. J. Hydraul. Eng. 1984, 110, 1431–1456. [Google Scholar] [CrossRef]
- Einstein, H.A. The Bed-Load Function for Sediment Transport in Open Channel Flow; U.S. Dept. of Agriculture, Soil Conservation Service: Washington, DC, USA, 1950. [Google Scholar]
- Smith, J.D.; McLean, S.R. Spatially averaged flow over a wavy surface. J. Geophys. Res. Space Phys. 1977, 82, 1735–1746. [Google Scholar] [CrossRef]
- Dyer, K.R. Coastal and Estuarine Sediment Dynamics; John Wiley and Sons: Chichester, UK, 1986. [Google Scholar]
- Van Rijn, L.C. Sedimentation of Dredged Channels by Currents and Waves. J. Waterw. Port Coast. Ocean. Eng. 1986, 112, 541–559. [Google Scholar] [CrossRef]
- Yalin, M.S. Mechanics of Sediment Transport, 2nd ed.; Pergamon Press: New York, NY, USA, 1977; 298p. [Google Scholar]
- Robijns, T. Flow beneath Inland Navigation Vessels. Master’s Thesis, TU Delft, Delft, The Netherlands, 2014. [Google Scholar]
- ITTC (Repport), Recommanded Procedures and Guidelines 7.5-02-05-01, Testing and Extrapolation Methods High Speed Marine Vehicles Resistance Test (Report). 2008. Available online: https://ittc.info/media/1637/75-02-05-01.pdf (accessed on 30 June 2021).
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J.; Coleman, H.; Raad, P.E. Procedure for Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 078001. [Google Scholar] [CrossRef]
- Kaidi, S.; Smaoui, H.; Sergent, P. Numerical estimation of bank-propeller-hull interaction effect on ship manoeuvring using CFD method. J. Hydrodyn. 2017, 29, 154–167. [Google Scholar] [CrossRef]
- Kaidi, S.; Smaoui, H.; Sergent, P. CFD Investigation of Mutual Interaction between Hull, Propellers, and Rudders for an Inland Container Ship in Deep, Very Deep, Shallow, and Very Shallow Waters. J. Waterw. Port Coast. Ocean. Eng. 2018, 144, 04018017. [Google Scholar] [CrossRef]
- PIANC. Guidelines for Protecting Berthing Structures from Scour Caused by Ships; Report No. 180; The World Association for Waterborne Transportation Infrastructure: Brussels, Belgium, 2015. [Google Scholar]
- Hamill, G.A.; Kee, C.; Ryan, D. 3D Efflux velocity characteristics of marine propeller jets. Proc. ICE Marit. Eng. 2015, 168, 62–75. [Google Scholar] [CrossRef][Green Version]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sediment size | d50 (m) | 0.00016 |
| Bed roughness | Ks (m) | 0.025 |
| Upstream flow depth | h0 (m) | 0.40 |
| Average upstream velocity | u0 (m/s) | 0.50 |
| Density of sediment | (kg/m3) | 2650 |
| Density of water | (kg/ m3) | 998.2 |
| Fine | Medium | Coarse | |
|---|---|---|---|
| Grid number (103) | 41.60 | 30.55 | 22.00 |
| h (10−2 m) | 1.32 | 2.18 | 3.33 |
| rk | 1.53 | 1.65 | |
| Authors | Coefficient “α” | Nomenclature |
|---|---|---|
| [3] | - | |
| [1] | - | |
| [4] | P: is the propeller’s pitch : is the blade area ratio | |
| [5] | : is the propeller hub diameter | |
| [6] | (free propeller) (ducted propeller) | - |
| Full Scale Model | Scaled Model (1/25) | |
|---|---|---|
| Length (LPP) | 135 m | 5.4 m |
| Beam (B) | 11.4 m | 0.456 m |
| Draught (T) | 2.5 m | 0.1 m |
| Block coefficient (CB) | 0.899 | 0.899 |
| Wetted surface (WS) | 2104.8 m2 | 3.367 m2 |
| Cross area of ship (CS) | 34.114 m2 | 0.0545 m2 |
| Propeller Data | ||
|---|---|---|
| Type | Fixed Pitch | |
| Number of propellers | np | 2 |
| Number of blades | z | 5 |
| Propeller Diameter | DP | 0.08 m |
| Hub diameter ratio | Dh/DP | 0.03 m |
| Pich at r/R = 0.7 | P0.7 | 0.130 m |
| Skew angle | 18.8° | |
Rotation direction:
| Right-handed Left-handed | |
| Inlet | Pressure Inlet | Free Surface Level with x-Velocity (Ship’s Velocity) |
|---|---|---|
| Outlet | Pressure outlet | Specified Free Surface Level |
| Ship hull | Wall | No Slip & Wall Roughness (Default) |
| Bottom wall | Moving wall | No Slip & Motion: x-velocity & Wall Roughness (0.025) |
| Sides and top | Symmetry | Default |
| h/T = 1.2 | h/T = 1.5 | h/T = 2.0 | h/T = 3.0 | |
|---|---|---|---|---|
| J = 1.3 | 0.55 (m/s)/d50 = 1.6 × 10−6 m | X | X | X |
| J = 1.1 | 0.55 (m/s)/d50 = 1.6 × 10−6 m | 0.55 (m/s)/d50 = 1.6 × 10−6 m | 0.55 (m/s)/d50 = 1.6 × 10−6 m | 0.55 (m/s)/d50 = 1.6 × 10−6 m |
| /d50: 1/1.6/2.4/3 × (10−6 m) | ||||
| J = 0.9 | 0.55 (m/s)/d50 = 1.6 × 10−6 m | X | X | X |
| J = 0.7 | 0.55 (m/s)/d50 = 1.6 × 10−6 m | X | X | X |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaidi, S.; Smaoui, H.; Sergent, P. Numerical Investigation of the Inland Transport Impact on the Bed Erosion and Transport of Suspended Sediment: Propulsive System and Confinement Effect. J. Mar. Sci. Eng. 2021, 9, 746. https://doi.org/10.3390/jmse9070746
Kaidi S, Smaoui H, Sergent P. Numerical Investigation of the Inland Transport Impact on the Bed Erosion and Transport of Suspended Sediment: Propulsive System and Confinement Effect. Journal of Marine Science and Engineering. 2021; 9(7):746. https://doi.org/10.3390/jmse9070746
Chicago/Turabian StyleKaidi, Sami, Hassan Smaoui, and Philippe Sergent. 2021. "Numerical Investigation of the Inland Transport Impact on the Bed Erosion and Transport of Suspended Sediment: Propulsive System and Confinement Effect" Journal of Marine Science and Engineering 9, no. 7: 746. https://doi.org/10.3390/jmse9070746
APA StyleKaidi, S., Smaoui, H., & Sergent, P. (2021). Numerical Investigation of the Inland Transport Impact on the Bed Erosion and Transport of Suspended Sediment: Propulsive System and Confinement Effect. Journal of Marine Science and Engineering, 9(7), 746. https://doi.org/10.3390/jmse9070746