
Advances in Numerical Reynolds-Averaged Navier–Stokes Modelling of Wave-Structure-Seabed Interactions and Scour



Abstract
1. Introduction
2. Damage to Structures and Coastline: The Role of Scour
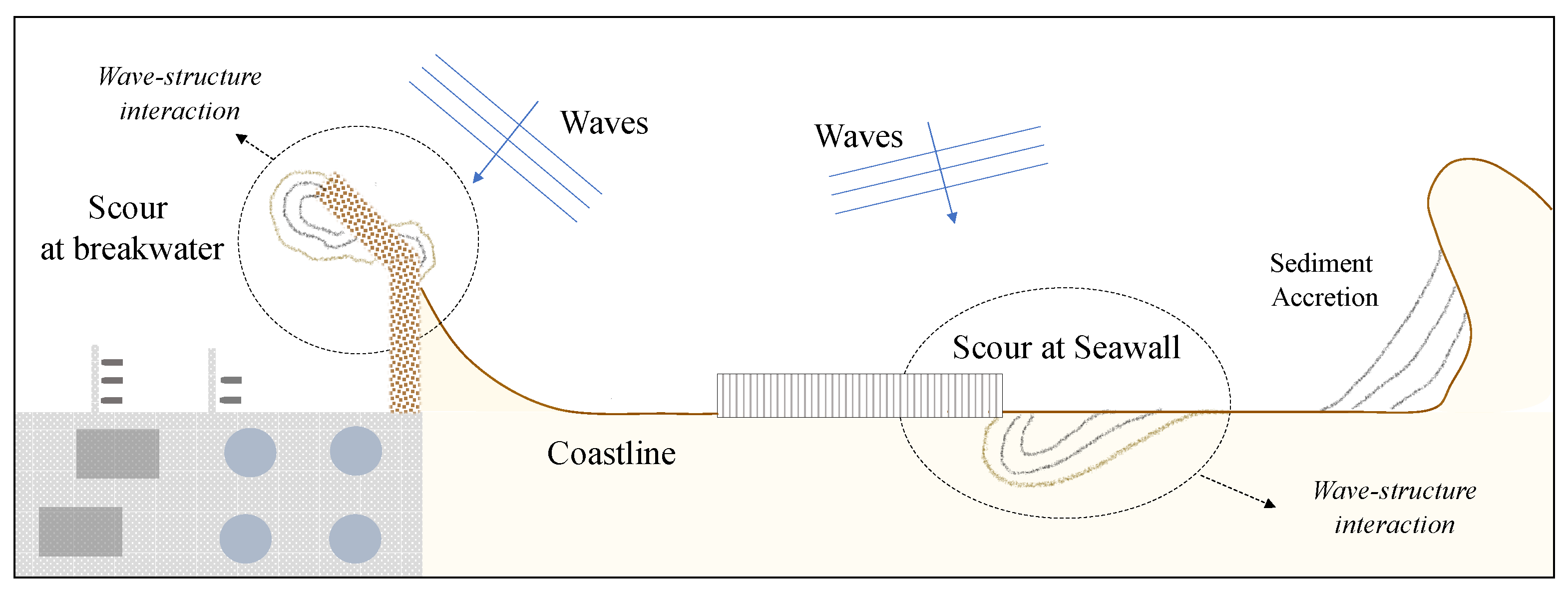
2.1. Concept of Scour
2.2. Processes Involved in Wave-Structure-Seabed Interactions
- (A)
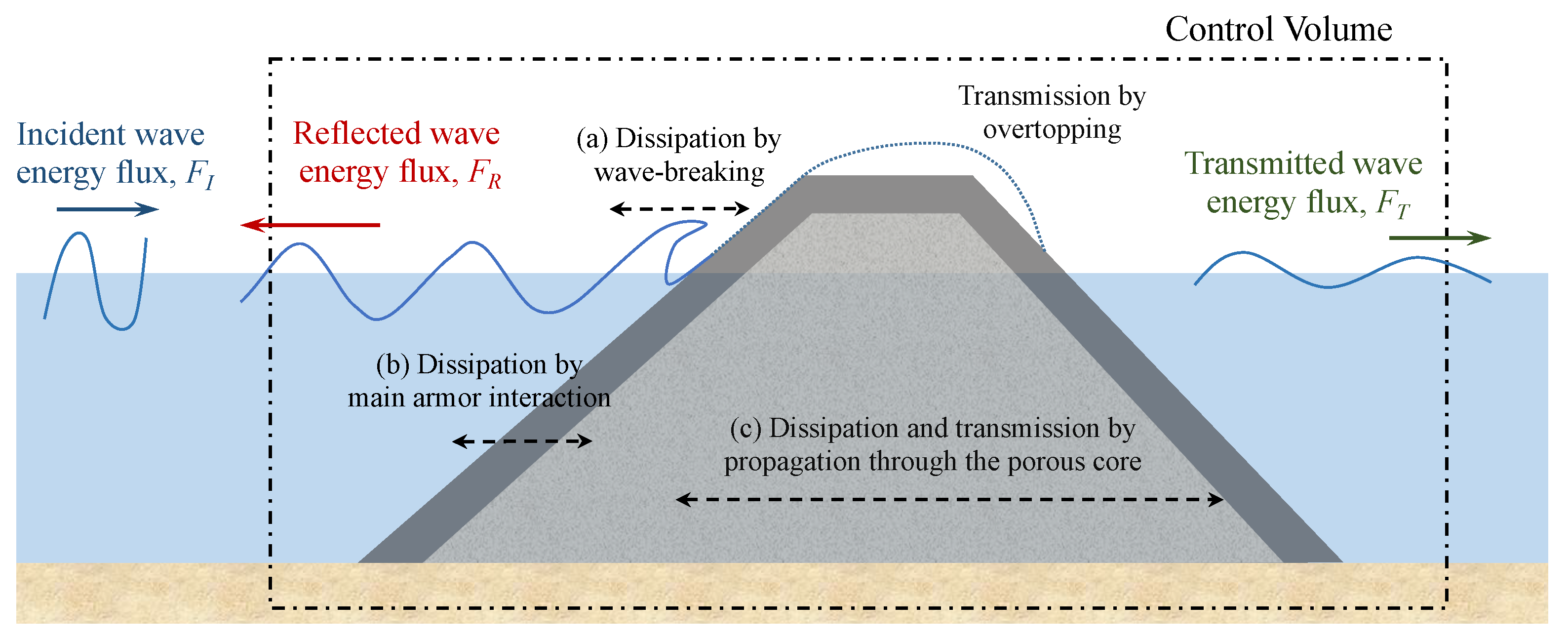
- Wave reflection: sediment transport due to wave reflection is perhaps the most commonly cited process in structure–seabed interactions [43]. The presence of a maritime structure transforms the incident wave energy into reflected energy, which is returned to the sea (Figure 3). This process involves an increase in wave height and wave energy, in front of the structure, i.e., greater shear stresses on the seabed and, thus, sediment transport.
- Wave dissipation: when waves impact a coastal structure, part of its incident wave energy is dissipated by (Figure 3): (a) wave-breaking on the slope or wall, (b) turbulent interactions (circulation and friction) with the armour layer, and (c) wave propagation through the porous media of the structure [44]. Among these, wave-breaking on the wall or slope mainly affects sediment transport, which generates turbulence in front of the structure and then mobilizes sediment.
- (B)
- Wave diffraction and refraction: when waves interact with an obstacle or coastline, part of the incident energy is concentrated or dispersed in a certain direction, which induces variations in the wave height and flow velocity, causing non-uniform erosion or sediment deposition [45,46]. Furthermore, waves that interact with submerged breakwaters are reduced by a number of energy dissipation mechanisms, including wave breaking and frictional dissipation [47,48], which can cause sediment transport around these structures.
- (C)
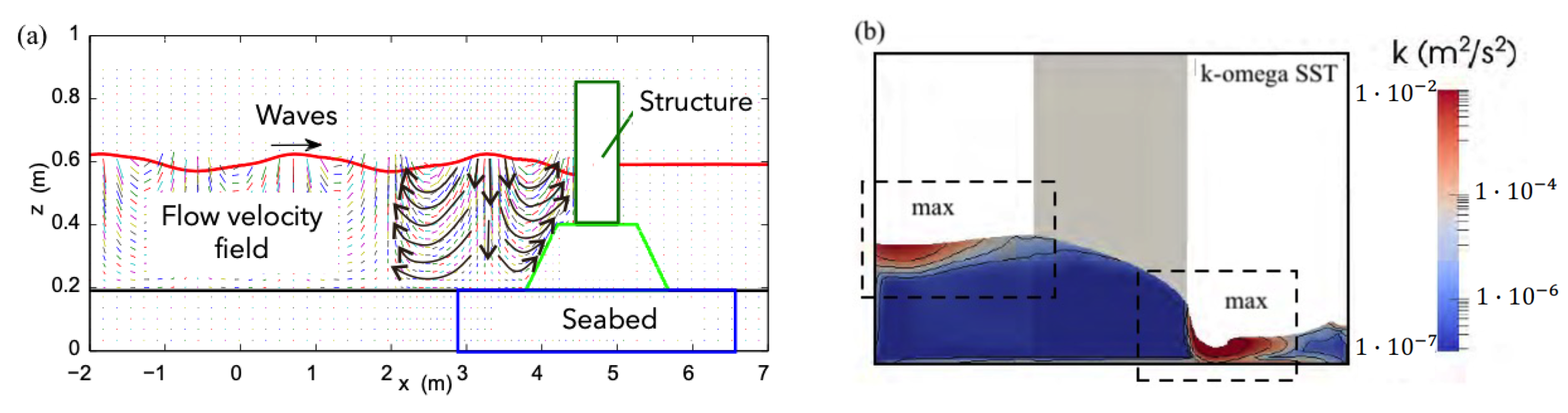
- Turbulent flow around the structure: the flow contraction and velocity field generate turbulence and vortexes around and in front of the structure (Figure 4), which increase the bottom shear stresses () and sediment mobilization [34,43]. Some figures of Higuera et al. [49] show the increase of turbulence kinetic energy () in front of and around a vertical wall and a porous breakwater.
- (D)
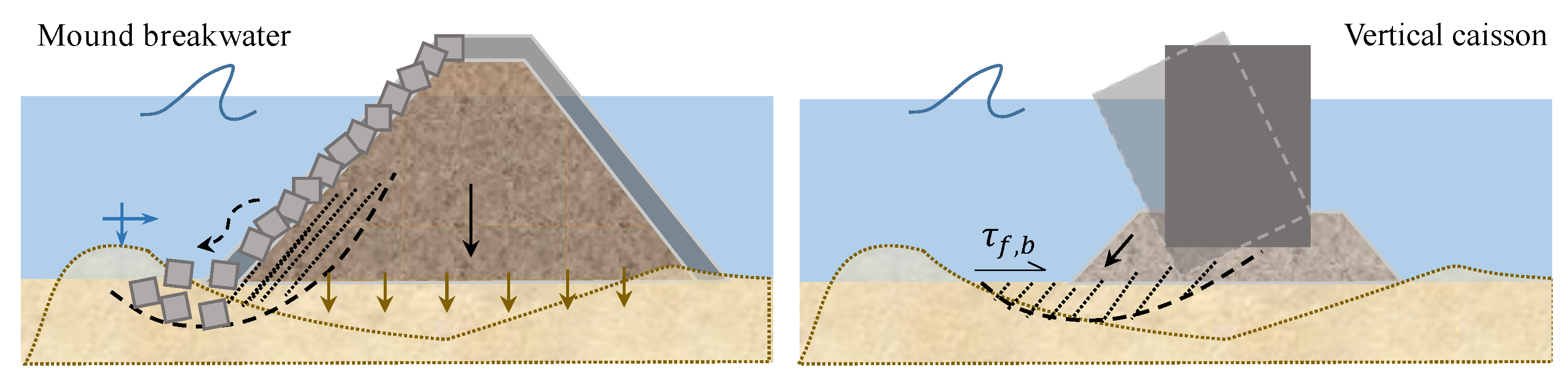
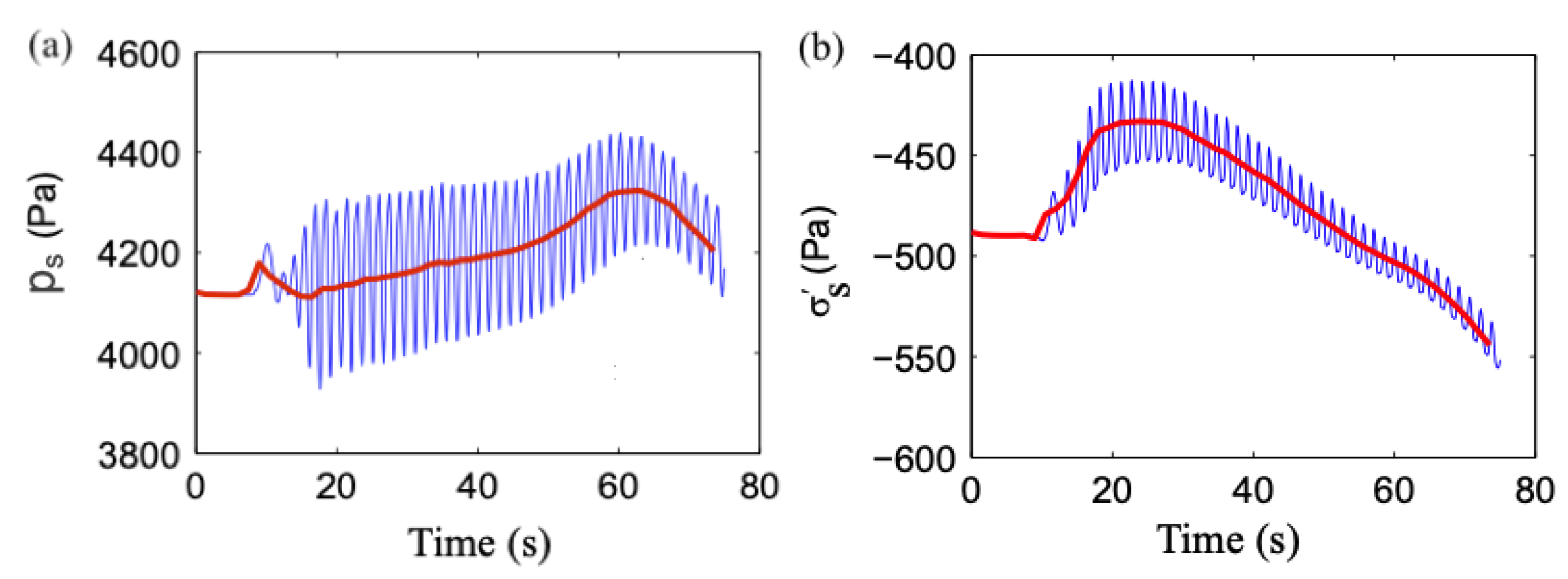
- Liquefaction: the pressure differential in the soil may produce the liquefaction of the seabed [13,50,51], which leads to the loss of the seabed load-bearing capacity. A liquefied soil will be more susceptible to scour. The liquefaction phenomenon happens when the soil effective stresses are cancelled due to an increase of the pore water pressure. Figure 5 shows the stress field and pore pressure in front of a maritime structure. It can be seen how the effective normal stress () decreases as the wave-induced pore pressure () increases.



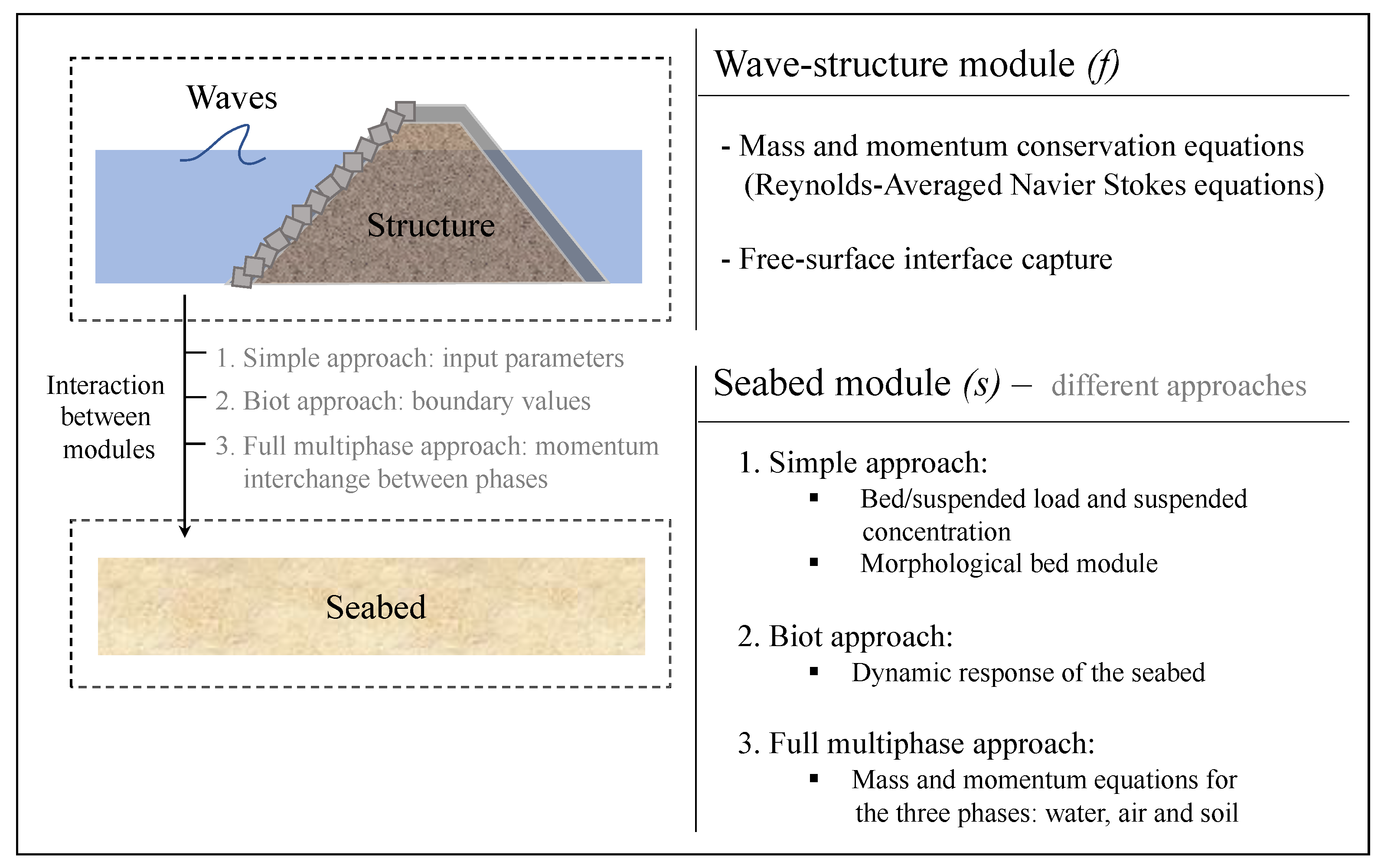
3. Numerical Modelling of Seabed Response
3.1. Simple Approach
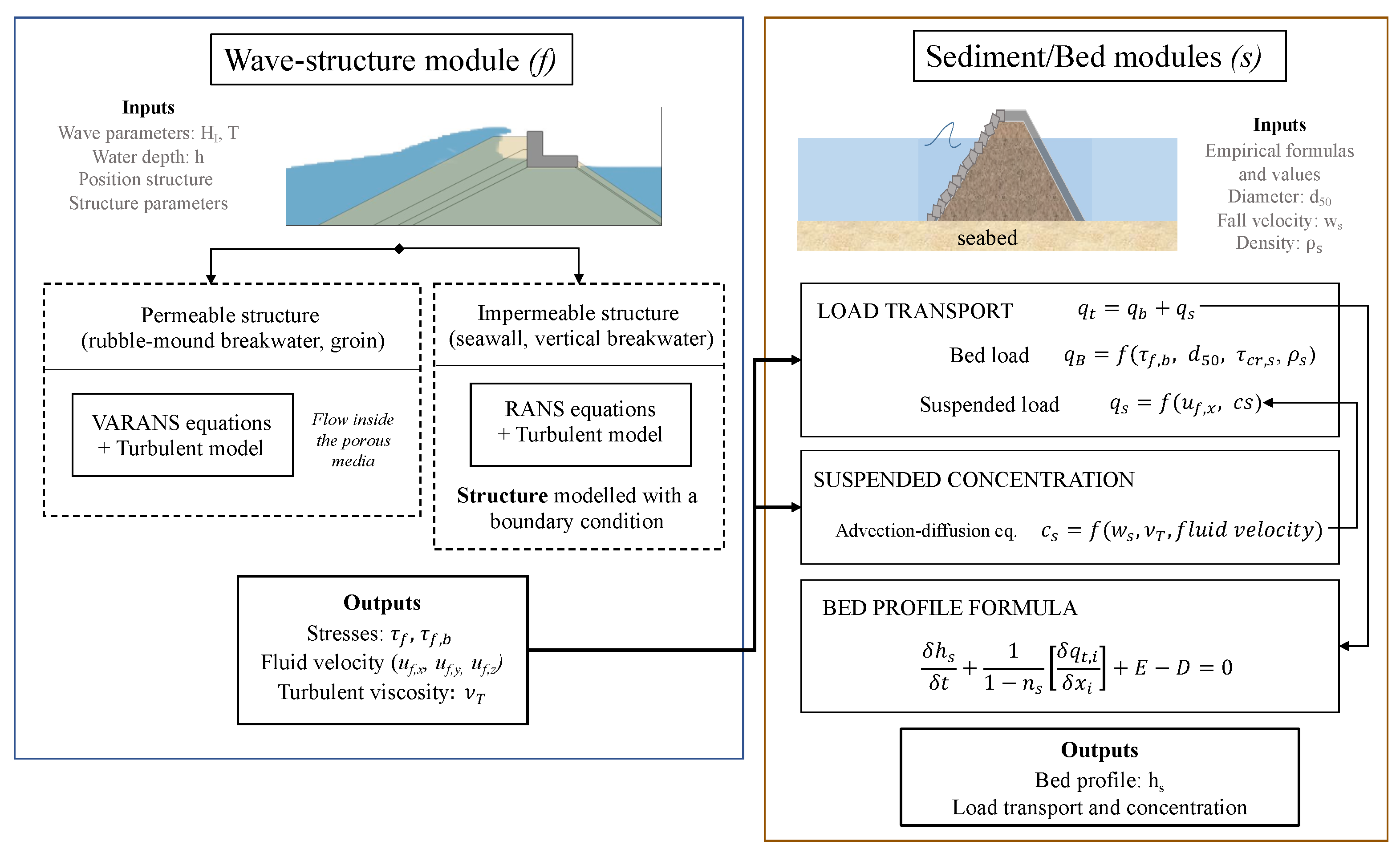
3.1.1. Wave-Structure Module: Rans Equations
- The resulting flow variables (e.g., , ) describe the mean flow field. Turbulence effects are introduced via the Reynolds’s stresses in the momentum equation, which must be modelled using a turbulence closure.
- The turbulence models are usually based on the Boussinesq’s eddy viscosity hypothesis: . The eddy viscosity is estimated using semi-empirical models.
- The free-surface of the waves and flow inside the porous media of the structure should be considered in this module.
- Density variations are considered in some instances. In this case, an extra density-weighted averaging step is carried out, which results in the Favre-Averaged Navier–Stokes equations (FANS).
Turbulence Model
Free-Surface Capturing
Flow inside the Permeable Structure
3.1.2. Sediment Transport Module
3.1.3. Morphological Bed Module
3.1.4. Applicability of the Simple Approach
3.2. Biot Approach
3.2.1. Seabed Module: Biot’s Equations
- (1)
- The momentum conservation equation for the mixture (fluid and sediment) can be written as:
- (2)
- When considering the flow to be governed by Darcy’s law, the momentum equation of fluid phase is written as:
- (3)
- The mass conservation equation for fluid phase can be stated as;
Inertial Terms
- Fully dynamic: the coupled equations of flow and deformation are formulated to include both acceleration terms: ,
- Partly dynamic, which is also known as dynamic: the coupled equations of flow and deformation are formulated when only considering the acceleration of the seabed, .
- Quasi-static: both inertial terms are ignored, resulting in quasi-static coupled flow and deformation formulation.
Rheological Models
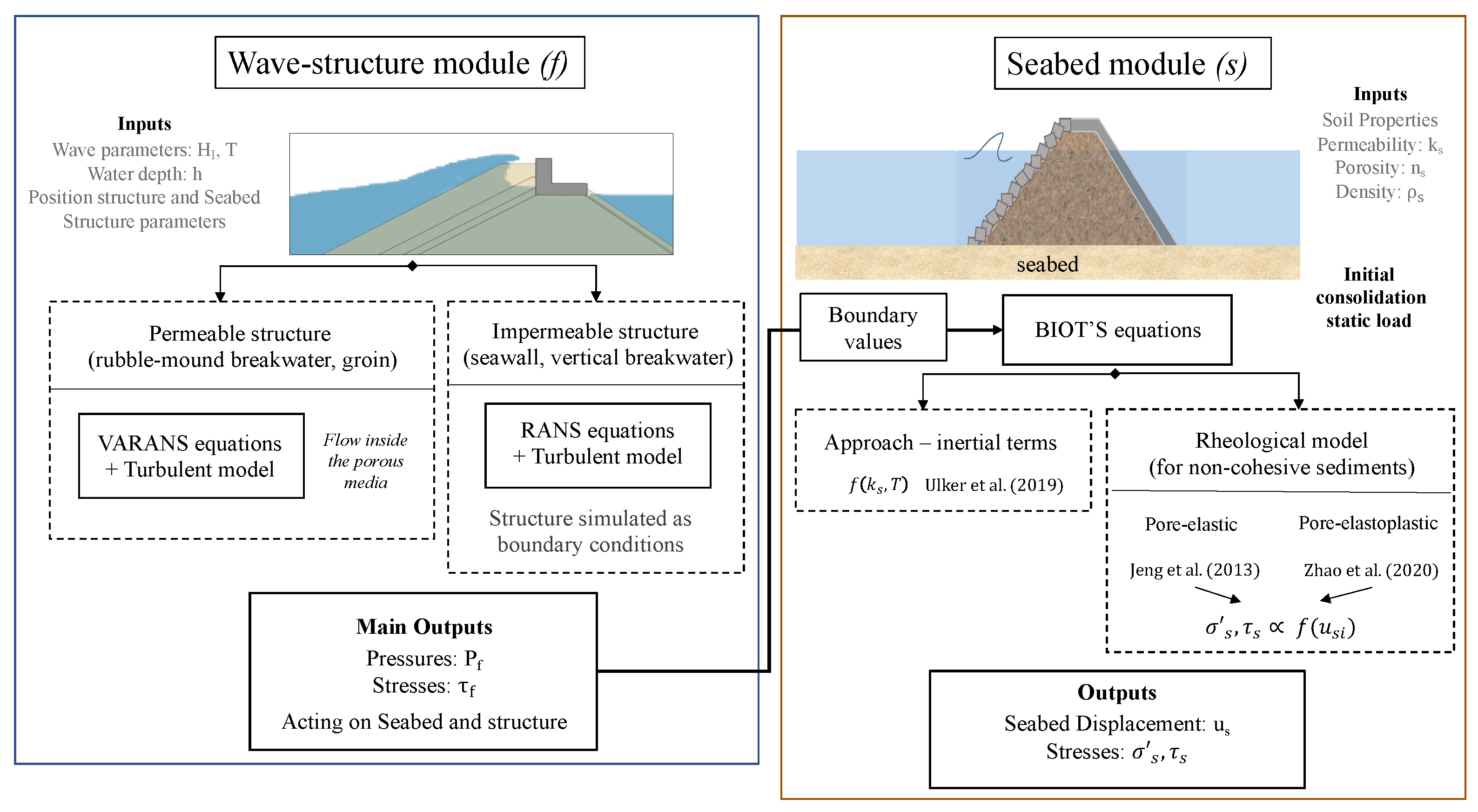
Interactions between the Modules
- 1.
- The wave-induced pressure and bottom shear stresses determined in the wave module are the boundary conditions for the seabed module: and at the seabed surface.
- 2.
- The initial consolidation state of the seabed due to static wave and structure loading has to be determined before the dynamic wave loading is applied in the numerical model. This initial consolidation state of the seabed will be the initial stress state for the dynamic seabed response under wave loading.
- 3.
- The seabed’s feedback effect on the wave and structure motions (two-way coupling) is neglected.
3.2.2. Applicability of the Biot Approach
3.3. Full Multiphase Approach
3.3.1. Governing Equations
- (1)
- Mass conservation equations:
- (2)
- Momentum conservation equations:where the sub-indexes f and s refer to the fluid and sediment phases, respectively; is the density; c is the volume concentration of sediment; u is the velocity; is the kinematic viscosity; is the Schmidt number; p is the pressure; represents the viscous and turbulent stress tensor; and, is the response time of the particles, with being the settling velocity of the sediment. The last two terms in the momentum equations are related to momentum interchanges between the sediment and fluid phases: the first term accounts for the drag force and the second term for turbulent dispersion.
3.3.2. Applicability of the Full Multiphase Approach
4. Conclusion and Future Prospects
- 1.
- The simple approach considers: (a) the bed load transport with empirical formulas; (b) the suspended concentration with the advection–diffusion equation and suspended load transport; and, (c) the seabed level with the Exner formula. The wave module is mainly based on RANS or VARANS equations, depending on whether the structure is permeable or impermeable. The studies that use the simple modelling approach mainly focus on small and low weight-structures to simulate the movement and deformation of the seabed (two-coupled approach). For large structures, such as breakwaters, these studies tend to underestimate the scouring results.
- 2.
- The Biot approach involves the RANS or VARANS equations for the wave module and the Biot’s equations for the seabed module. Biot’s equations are used to obtain the seabed displacement and stresses. The wave model is responsible for the wave generation and propagation, and it determines the pressure, , and stresses, , acting on th seabed and marine structures. The outputs of the wave module are used as boundary conditions for the seabed module. The studies that used Biot’s equations for the seabed module focus more on the stress field and pressures, which is, the mechanical behaviour of the seabed.
- 3.
- The full multiphase approach is the more complex approach and is difficult to implement numerically. It solves each phase (sediment, water, and air) with the Navier–Stokes equations (mass and momentum) at the same time and space. Most of the studies are based on small-scale problems given the very high computational costs that are associated with its use.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vousdoukas, M.I.; Mentaschi, L.; Voukouvalas, E.; Verlaan, M.; Feyen, L. Extreme sea levels on the rise along Europe’s coasts. Earth’s Future 2017, 5, 304–323. [Google Scholar] [CrossRef]
- Irie, I.; Nadaoka, K. Laboratory reproduction of seabed scour in front of breakwaters. In Coastal Engineering 1984; American Society of Civil Engineers: Reston, VA, USA, 1985; pp. 1715–1731. [Google Scholar]
- Burcharth, H.; Hughes, S. Shore Protection Manual. Chapter 6: Fundamentals of design; US Army Corps of Engineers: Washington, DC, USA, 2002; Volume 1.
- ROM 1.1-18. Recommendations for Breakwater Construction Projects; Technical Report; Puertos del Estado: Madrid, Spain, 2018. [Google Scholar]
- Molinero Guillén, P. Large breakwaters in deep water in northern Spain. In Proceedings of the Institution of Civil Engineers—Maritime Engineering; Thomas Telford Ltd.: London, UK, 2008; Volume 161, pp. 175–186. [Google Scholar]
- Puzrin, A.M.; Alonso, E.E.; Pinyol, N.M. Geomechanics of Failures; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Hughes, S. Scour and Scour Protection. Ph.D. Thesis, Coastal and Hydraulics Laboratory, US Army Engineer Research and Development Center, Vicksburg, MS, USA, 1993. [Google Scholar]
- Sumer, B.M. Coastal and offshore scour/erosion issues-recent advances. In Proceedings of the 4th International Conference on Scour and Erosion (ICSE-4), Tokyo, Japan, 5–7 November 2008; pp. 85–94. [Google Scholar]
- Maa, P.Y.; Mehta, A. Mud erosion by waves: A laboratory study. Cont. Shelf Res. 1987, 7, 1269–1284. [Google Scholar] [CrossRef]
- Foda, M.A.; Hunt, J.R.; Chou, H.T. A nonlinear model for the fluidization of marine mud by waves. J. Geophys. Res. Ocean. 1993, 98, 7039–7047. [Google Scholar] [CrossRef]
- Tsai, Y.; McDougal, W.; Sollitt, C. Response of finite depth seabed to waves and caisson motion. J. Waterw. Port Coast. Ocean Eng. 1990, 116, 1–20. [Google Scholar] [CrossRef]
- Kumagai, T.; Foda, M.A. Analytical model for response of seabed beneath composite breakwater to wave. J. Waterw. Port Coast. Ocean Eng. 2002, 128, 62–71. [Google Scholar] [CrossRef]
- Liao, C.; Tong, D.; Chen, L. Pore pressure distribution and momentary liquefaction in vicinity of impermeable slope-type breakwater head. Appl. Ocean Res. 2018, 78, 290–306. [Google Scholar] [CrossRef]
- Sutherland, J.; Obhrai, C.; Whitehouse, R.J.; Pearce, A. Laboratory tests of scour at a seawall. In Proceedings of the 3rd International Conference on Scour and Erosion, Amsterdam, The Netherlands, 1–3 November 2006; Technical University of Denmark: Lyngby, Denmark, 2006. [Google Scholar]
- Pearce, A.; Sutherland, J.; Obhrai, C.; Müller, G.; Rycroft, D.; Whitehouse, R. Scour at a seawall-field measurements and laboratory modelling. In Coastal Engineering, San Diego, California, USA, 3–8 September 2006; World Scientific: Singapore, 2007; Volumes 5, pp. 2378–2390. [Google Scholar]
- Tsai, C.P.; Chen, H.B.; You, S.S. Toe scour of seawall on a steep seabed by breaking waves. J. Waterw. Port Coast. Ocean Eng. 2009, 135, 61–68. [Google Scholar] [CrossRef]
- Jayaratne, R.; Mendoza, E.; Silva, R.; Gutiérrez, F. Laboratory Modelling of Scour on Seawalls. In Coastal Structures and Solutions to Coastal Disasters 2015: Resilient Coastal Communities; ASCE: Reston, VA, USA, 2017; pp. 809–816. [Google Scholar]
- Sutherland, J.; Chapman, B.; Whitehouse, R. SCARCOST Experiments in the UK Coastal Research Facility-Data on Scour around a Detached Rubble Mound Breakwater; Technical Report; HR Wallingford: Oxfordshire, UK, 1999. [Google Scholar]
- Sutherland, J.; Whitehouse, R.; Chapman, B. Scour and deposition around a detached rubble mound breakwater. Coast. Struct. 2000, 99, 897–904. [Google Scholar]
- Sumer, B.M.; Fredsøe, J. Experimental study of 2D scour and its protection at a rubble-mound breakwater. Coast. Eng. 2000, 40, 59–87. [Google Scholar] [CrossRef]
- Fausset, S. Field and laboratory investigation into scour around breakwaters. Plymouth Stud. Sci. 2017, 10, 195–238. [Google Scholar]
- Temel, A.; Dogan, M. Time dependent investigation of the wave induced scour at the trunk section of a rubble mound breakwater. Ocean Eng. 2021, 221, 108564. [Google Scholar] [CrossRef]
- Kumar, A.; Kothyari, U.C.; Raju, K.G.R. Flow structure and scour around circular compound bridge piers—A review. J. Hydro-Environ. Res. 2012, 6, 251–265. [Google Scholar] [CrossRef]
- Gazi, A.H.; Afzal, M.S.; Dey, S. Scour around piers under waves: Current status of research and its future prospect. Water 2019, 11, 2212. [Google Scholar] [CrossRef]
- Sumer, B.M.; Whitehouse, R.J.; Tørum, A. Scour around coastal structures: A summary of recent research. Coast. Eng. 2001, 44, 153–190. [Google Scholar] [CrossRef]
- Sumer, B.M. Mathematical modelling of scour: A review. J. Hydraul. Res. 2007, 45, 723–735. [Google Scholar] [CrossRef]
- Jeng, D. Mechanism of the wave-induced seabed instability in the vicinity of a breakwater: A review. Ocean Eng. 2001, 28, 537–570. [Google Scholar] [CrossRef]
- Vreugdenhil, C.B. Numerical Methods for Shallow-Water Flow; Springer Science & Business Media: Berlin, Germany, 1994; Volume 13. [Google Scholar]
- Postacchini, M.; Brocchini, M.; Mancinelli, A.; Landon, M. A multi-purpose, intra-wave, shallow water hydro-morphodynamic solver. Adv. Water Resour. 2012, 38, 13–26. [Google Scholar] [CrossRef]
- Postacchini, M.; Russo, A.; Carniel, S.; Brocchini, M. Assessing the hydro-morphodynamic response of a beach protected by detached, impermeable, submerged breakwaters: A numerical approach. J. Coast. Res. 2016, 32, 590–602. [Google Scholar]
- Son, S.; Lynett, P.; Ayca, A. Modelling scour and deposition in harbours due to complex tsunami-induced currents. Earth Surf. Process. Landf. 2020, 45, 978–998. [Google Scholar] [CrossRef]
- Briganti, R.; Torres-Freyermuth, A.; Baldock, T.E.; Brocchini, M.; Dodd, N.; Hsu, T.J.; Jiang, Z.; Kim, Y.; Pintado-Patiño, J.C.; Postacchini, M. Advances in numerical modelling of swash zone dynamics. Coast. Eng. 2016, 115, 26–41. [Google Scholar] [CrossRef]
- Briganti, R.; Dodd, N.; Kelly, D.; Pokrajac, D. An efficient and flexible solver for the simulation of the morphodynamics of fast evolving flows on coarse sediment beaches. Int. J. Numer. Methods Fluids 2012, 69, 859–877. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsoe, J. The mechanics of scour in the marine environment. In Advanced Series on Ocean Engineering: Volume 17; World Scientific: Singapore, 2002. [Google Scholar]
- Whitehouse, R. Scour at Marine Structures: A Manual for Practical Applications; Thomas Telford: Telford, UK, 1998. [Google Scholar]
- Whitehouse, R. Scour at Marine Structures. In Proceedings of the Third International Conference on Scour and Erosion, Amsterdam, The Netherlands, 1–3 November 2006. [Google Scholar]
- Pilkey, O.H.; Wright III, H.L. Seawalls versus beaches. J. Coast. Res. 1988, 4, 41–64. [Google Scholar]
- Basco, D. Seawall impacts on adjacent beaches: Separating fact from fiction. J. Coast. Res. 2006, 39, 741–744. [Google Scholar]
- Balaji, R.; Sathish Kumar, S.; Misra, A. Understanding the effects of seawall construction using a combination of analytical modelling and remote sensing techniques: Case study of Fansa, Gujarat, India. Int. J. Ocean Clim. Syst. 2017, 8, 153–160. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. Wave scour around structures. In Advances in Coastal and Ocean Engineering; World Scientific: Singapore, 1999; pp. 191–249. [Google Scholar]
- Baquerizo, A.; Losada, M.; López, M. Fundamentos del movimiento oscilatorio. In Manuales de Ingeniería y Tecnología; Editorial Universidad de Granada: Granada, Spain, 2005. [Google Scholar]
- Díaz-Carrasco, P.; Moragues, M.V.; Clavero, M.; Losada, M.Á. 2D water-wave interaction with permeable and impermeable slopes: Dimensional analysis and experimental overview. Coast. Eng. 2020, 158, 103682. [Google Scholar] [CrossRef]
- Tait, J.F.; Griggs, G.B. Beach Response to the Presence of a Seawall; Comparison of Field Observations; Technical Report; California University of Santa Cruz: Santa Cruz, CA, USA, 1991. [Google Scholar]
- Clavero, M.; Díaz-Carrasco, P.; Losada, M.Á. Bulk Wave Dissipation in the Armor Layer of Slope Rock and Cube Armored Breakwaters. J. Mar. Sci. Eng. 2020, 8, 152. [Google Scholar] [CrossRef]
- Tang, J.; Lyu, Y.; Shen, Y.; Zhang, M.; Su, M. Numerical study on influences of breakwater layout on coastal waves, wave-induced currents, sediment transport and beach morphological evolution. Ocean Eng. 2017, 141, 375–387. [Google Scholar] [CrossRef]
- Do, J.D.; Jin, J.Y.; Hyun, S.K.; Jeong, W.M.; Chang, Y.S. Numerical investigation of the effect of wave diffraction on beach erosion/accretion at the Gangneung Harbor, Korea. J. Hydro-Environ. Res. 2020, 29, 31–44. [Google Scholar] [CrossRef]
- Batjest, J.A.; Beji, S. Spectral evolution in waves traveling over a shoal. In Proceedings of the Nonlinear Water Waves Workshop, Bristol, UK, 22–25 October 1991; p. 11. [Google Scholar]
- Ferrante, V.; Vicinanza, D. Spectral analysis of wave transmission behind submerged breakwaters. In Proceedings of the The Sixteenth International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006. [Google Scholar]
- Higuera, P.; Lara, J.L.; Losada, I.J. Three-dimensional interaction of waves and porous coastal structures using OpenFOAM®. Part I: Formulation and validation. Coast. Eng. 2014, 83, 243–258. [Google Scholar] [CrossRef]
- McAnally, W.H.; Friedrichs, C.; Hamilton, D.; Hayter, E.; Shrestha, P.; Rodriguez, H.; Sheremet, A.; Teeter, A.; ASCE Task Committee on Management of Fluid Mud. Management of fluid mud in estuaries, bays, and lakes. I: Present state of understanding on character and behavior. J. Hydraul. Eng. 2007, 133, 9–22. [Google Scholar] [CrossRef]
- Chávez, V.; Mendoza, E.; Silva, R.; Silva, A.; Losada, M.A. An experimental method to verify the failure of coastal structures by wave induced liquefaction of clayey soils. Coast. Eng. 2017, 123, 1–10. [Google Scholar] [CrossRef]
- Losada, I.; Patterson, M.D.; Losada, M. Harmonic generation past a submerged porous step. Coast. Eng. 1997, 31, 281–304. [Google Scholar] [CrossRef]
- Ye, J.; Zhang, Y.; Wang, R.; Zhu, C. Nonlinear interaction between wave, breakwater and its loose seabed foundation: A small-scale case. Ocean Eng. 2014, 91, 300–315. [Google Scholar] [CrossRef]
- Higuera, P. Aplicación de la dinámica de fluidos computacional a la acción del oleaje sobre estructuras. Ph.D. Thesis, Universidad de Cantabria, Santander, Spain, 2015. [Google Scholar]
- Blondeaux, P.; Vittori, G.; Porcile, G. Modeling the turbulent boundary layer at the bottom of sea wave. Coast. Eng. 2018, 141, 12–23. [Google Scholar] [CrossRef]
- Díaz-Carrasco, P.; Vittori, G.; Blondeaux, P.; Ortega-Sánchez, M. Non-cohesive and cohesive sediment transport due to tidal currents and sea waves: A case study. Cont. Shelf Res. 2019, 183, 87–102. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Cao, Z.; Sun, D.; Wei, J.; Yu, B.; Li, J. A coupled volume-of-fluid and level set method based on general curvilinear grids with accurate surface tension calculation. J. Comput. Phys. 2019, 396, 799–818. [Google Scholar] [CrossRef]
- Liu, P.L.F.; Lin, P.; Chang, K.A.; Sakakiyama, T. Numerical modeling of wave interaction with porous structures. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 322–330. [Google Scholar] [CrossRef]
- Polubarinova-Koch, P.I. Theory of Ground Water Movement; Princeton University Press: Princeton, NJ, USA, 1962. [Google Scholar]
- Burcharth, H.; Andersen, O. On the one-dimensional steady and unsteady porous flow equations. Coast. Eng. 1995, 24, 233–257. [Google Scholar] [CrossRef]
- Van Gent, M. Porous flow through rubble-mound material. J. Waterw. Port Coast. Ocean Eng. 1995, 121, 176–181. [Google Scholar] [CrossRef]
- Van Rijn, L.C.; Kroon, A. Sediment transport by currents and waves. In Proceedings of the 23rd International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992; pp. 2613–2628. [Google Scholar]
- Zyserman, J.A.; Fredsøe, J. Data analysis of bed concentration of suspended sediment. J. Hydraul. Eng. 1994, 120, 1021–1042. [Google Scholar] [CrossRef]
- Sumer, B.M.; Chua, L.H.; Cheng, N.S.; Fredsøe, J. Influence of turbulence on bed load sediment transport. J. Hydraul. Eng. 2003, 129, 585–596. [Google Scholar] [CrossRef]
- Ni, J.R.; Qian Wang, G. Vertical sediment distribution. J. Hydraul. Eng. 1991, 117, 1184–1194. [Google Scholar] [CrossRef]
- Schumer, R.; Benson, D.A.; Meerschaert, M.M.; Wheatcraft, S.W. Eulerian derivation of the fractional advection–dispersion equation. J. Contam. Hydrol. 2001, 48, 69–88. [Google Scholar] [CrossRef]
- Ahmad, N.; Kamath, A.; Bihs, H. 3D numerical modelling of scour around a jacket structure with dynamic free surface capturing. Ocean Eng. 2020, 200, 107104. [Google Scholar] [CrossRef]
- Rouse, H. Modern conceptions of the mechanics of fluid turbulence. Trans. Am. Soc. Civ. Eng. 1937, 102, 463–505. [Google Scholar] [CrossRef]
- Tofany, N.; Ahmad, M.; Kartono, A.; Mamat, M.; Mohd-Lokman, H. Numerical modeling of the hydrodynamics of standing wave and scouring in front of impermeable breakwaters with different steepnesses. Ocean Eng. 2014, 88, 255–270. [Google Scholar] [CrossRef]
- Tofany, N.; Ahmad, M.; Mamat, M.; Mohd-Lokman, H. The effects of wave activity on overtopping and scouring on a vertical breakwater. Ocean Eng. 2016, 116, 295–311. [Google Scholar] [CrossRef]
- Fredsoe, J.; Deigaard, R. Advanced Series on Ocean Engineering: Volume 3. Mechanics of Coastal Sediment Transport; World Scientific Publishers: Singapore, 1992. [Google Scholar]
- Wu, W.; Rodi, W.; Wenka, T. 3D numerical modeling of flow and sediment transport in open channels. J. Hydraul. Eng. 2000, 126, 4–15. [Google Scholar] [CrossRef]
- Ahmad, N.; Bihs, H.; Myrhaug, D.; Kamath, A.; Arntsen, Ø.A. Numerical modeling of breaking wave induced seawall scour. Coast. Eng. 2019, 150, 108–120. [Google Scholar] [CrossRef]
- Baykal, C.; Sumer, B.M.; Fuhrman, D.R.; Jacobsen, N.G.; Fredsøe, J. Numerical simulation of scour and backfilling processes around a circular pile in waves. Coast. Eng. 2017, 122, 87–107. [Google Scholar] [CrossRef]
- Chen, B. The numerical simulation of local scour in front of a vertical-wall breakwater. J. Hydrodyn. 2006, 18, 132–136. [Google Scholar] [CrossRef]
- Gislason, K.; Fredsøe, J.; Sumer, B.M. Flow under standing waves: Part 2. Scour and deposition in front of breakwaters. Coast. Eng. 2009, 56, 363–370. [Google Scholar] [CrossRef]
- Li, Y.; Ong, M.C.; Fuhrman, D.R.; Larsen, B.E. Numerical investigation of wave-plus-current induced scour beneath two submarine pipelines in tandem. Coast. Eng. 2020, 156, 103619. [Google Scholar] [CrossRef]
- Omara, H.; Elsayed, S.; Abdeelaal, G.; Abd-Elhamid, H.; Tawfik, A. Hydromorphological numerical model of the local scour process around bridge piers. Arab. J. Sci. Eng. 2019, 44, 4183–4199. [Google Scholar] [CrossRef]
- Klonaris, G.T.; Metallinos, A.S.; Memos, C.D.; Galani, K.A. Experimental and numerical investigation of bed morphology in the lee of porous submerged breakwaters. Coast. Eng. 2020, 155, 103591. [Google Scholar] [CrossRef]
- Hughes, S.A.; Fowler, J.E. Midscale Physical Model Validation for Scour at Coastal Structures; Technical Report; Coastal Engineering Research Center: Vicksburg, MS, USA, 1990. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]
- Li, Y.; Ong, M.C.; Tang, T. A numerical toolbox for wave-induced seabed response analysis around marine structures in the OpenFOAM® framework. Ocean Eng. 2020, 195, 106678. [Google Scholar] [CrossRef]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 12, 155–164. [Google Scholar] [CrossRef]
- Jeng, D.S.; Ou, J. 3D models for wave-induced pore pressures near breakwater heads. Acta Mech. 2010, 215, 85–104. [Google Scholar] [CrossRef]
- Ulker, M.; Rahman, M. Response of saturated and nearly saturated porous media: Different formulations and their applicability. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 633–664. [Google Scholar] [CrossRef]
- Ulker, M.; Rahman, M.; Jeng, D.S. Wave-induced response of seabed: Various formulations and their applicability. Appl. Ocean Res. 2009, 31, 12–24. [Google Scholar] [CrossRef]
- Ulker, M.; Rahman, M.; Guddati, M. Wave-induced dynamic response and instability of seabed around caisson breakwater. Ocean Eng. 2010, 37, 1522–1545. [Google Scholar] [CrossRef]
- Díaz-Carrasco, P. Water-wave interaction with mound breakwaters: From the seabed to the armor layer. Ph.D. Thesis, University of Granada, Granada, Spain, 2019. [Google Scholar]
- Jeng, D.S.; Ye, J.H.; Zhang, J.S.; Liu, P.F. An integrated model for the wave-induced seabed response around marine structures: Model verifications and applications. Coast. Eng. 2013, 72, 1–19. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Jeng, D.S. Numerical study of wave-induced soil response in a sloping seabed in the vicinity of a breakwater. Appl. Ocean Res. 2015, 51, 204–221. [Google Scholar] [CrossRef]
- Ye, J.; Jeng, D.; Wang, R.; Zhu, C. Numerical simulation of the wave-induced dynamic response of poro-elastoplastic seabed foundations and a composite breakwater. Appl. Math. Model. 2015, 39, 322–347. [Google Scholar] [CrossRef]
- Ye, J.; Jeng, D.S.; Chan, A.; Wang, R.; Zhu, Q. 3D Integrated numerical model for fluid–structures–seabed interaction (FSSI): Elastic dense seabed foundation. Ocean Eng. 2017, 115, 107–122. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Zhu, J.F.; Zheng, J.H.; Zhang, J.S. Numerical modelling of the fluid–seabed-structure interactions considering the impact of principal stress axes rotations. Soil Dyn. Earthq. Eng. 2020, 136, 106242. [Google Scholar] [CrossRef]
- Zhang, J.S.; Jeng, D.S.; Liu, P.F. Numerical study for waves propagating over a porous seabed around a submerged permeable breakwater: PORO-WSSI II model. Ocean Eng. 2011, 38, 954–966. [Google Scholar] [CrossRef]
- Zhang, J.S.; Jeng, D.S.; Liu, P.F.; Zhang, C.; Zhang, Y. Response of a porous seabed to water waves over permeable submerged breakwaters with Bragg reflection. Ocean Eng. 2012, 43, 1–12. [Google Scholar] [CrossRef]
- Zhao, H.; Jeng, D.; Zhang, J.; Liao, C.; Zhang, H.; Zhu, J. Numerical study on loosely deposited foundation behavior around a composite breakwater subject to ocean wave impact. Eng. Geol. 2017, 227, 121–138. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, C.; Han, Y. Three-dimensional poro-elasto-plastic model for wave-induced seabed response around submarine pipeline. Soil Dyn. Earthq. Eng. 2015, 69, 163–171. [Google Scholar] [CrossRef]
- He, K.; Huang, T.; Ye, J. Stability analysis of a composite breakwater at Yantai port, China: An application of FSSI-CAS-2D. Ocean Eng. 2018, 168, 95–107. [Google Scholar] [CrossRef]
- Ye, J.; He, K.; Zhou, L. Subsidence prediction of a rubble mound breakwater at Yantai port: A application of FSSI-CAS 2D. Ocean Eng. 2021, 219, 108349. [Google Scholar] [CrossRef]
- Ye, J.; Jeng, D.; Wang, R.; Zhu, C. Validation of a 2-D semi-coupled numerical model for fluid–structure–seabed interaction. J. Fluids Struct. 2013, 42, 333–357. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, Y.; Jeng, D.S.; Liao, C.; Rey, N. An integrated numerical model for wave–soil–pipeline interactions. Coast. Eng. 2016, 108, 25–35. [Google Scholar] [CrossRef]
- Lin, Z.; Pokrajac, D.; Guo, Y.; Jeng, D.S.; Tang, T.; Rey, N.; Zheng, J.; Zhang, J. Investigation of nonlinear wave-induced seabed response around mono-pile foundation. Coast. Eng. 2017, 121, 197–211. [Google Scholar] [CrossRef]
- Zhao, H.; Jeng, D.S.; Liao, C.; Zhu, J. Three-dimensional modeling of wave-induced residual seabed response around a mono-pile foundation. Coast. Eng. 2017, 128, 1–21. [Google Scholar] [CrossRef]
- Jeng, D.S.; Wang, X.; Tsai, C.C. Meshless model for wave-induced oscillatory seabed response around a submerged breakwater due to regular and irregular wave loading. J. Mar. Sci. Eng. 2021, 9, 15. [Google Scholar] [CrossRef]
- Wang, X.X.; Jeng, D.S.; Tsai, C.C. Meshfree model for wave-seabed interactions around offshore pipelines. J. Mar. Sci. Eng. 2019, 7, 87. [Google Scholar] [CrossRef]
- Li, Y.; Ong, M.C.; Tang, T. Numerical analysis of wave-induced poro-elastic seabed response around a hexagonal gravity-based offshore foundation. Coast. Eng. 2018, 136, 81–95. [Google Scholar] [CrossRef]
- Elsafti, H.; Oumeraci, H. Analysis and classification of stepwise failure of monolithic breakwaters. Coast. Eng. 2017, 121, 221–239. [Google Scholar] [CrossRef]
- Lee, C.H.; Xu, C.; Huang, Z. A three-phase flow simulation of local scour caused by a submerged wall jet with a water-air interface. Adv. Water Resour. 2017, 129, 373–384. [Google Scholar] [CrossRef]
- Hsu, T.J.; Jenkins, J.T.; Liu, P.L.F. On two-phase sediment transport: Dilute flow. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef]
- Hsu, T.J.; Jenkins, J.T.; Liu, P.L.F. On two-phase sediment transport: Sheet flow of massive particles. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2004, 460, 2223–2250. [Google Scholar] [CrossRef]
- Murray, A.B.; Thieler, E.R. A new hypothesis and exploratory model for the formation of large-scale inner-shelf sediment sorting and “rippled scour depressions”. Cont. Shelf Res. 2004, 24, 295–315. [Google Scholar] [CrossRef]
- Amoudry, L.; Hsu, T.J.; Liu, P. Two-phase model for sand transport in sheet flow regime. J. Geophys. Res. 2008, 113, 1–15. [Google Scholar] [CrossRef]
- Lee, C.H.; Low, Y.M.; Chiew, Y.M. Multi-dimensional rheology-based two-phase model for sediment transport and applications to sheet flow and pipeline scour. Phys. Fluids 2016, 28, 053305. [Google Scholar] [CrossRef]
- Cheng, Z.; Hsu, T.J.; Calantoni, J. SedFoam: A multi-dimensional Eulerian two-phase model for sediment transport and its application to momentary bed failure. Coast. Eng. 2017, 119, 32–50. [Google Scholar] [CrossRef]
- Ouda, M.; Toorman, E.A. Development of a new multiphase sediment transport model for free surface flows. Int. J. Multiph. Flow 2019, 117, 81–102. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. Scour below pipelines in waves. J. Waterw. Port Coast. Ocean Eng. 1990, 116, 307–323. [Google Scholar] [CrossRef]
- Lee, C.H.; Huang, Z.; Chiew, Y.M. A three-dimensional continuum model incorporating static and kinetic effects for granular flows with applications to collapse of a two-dimensional granular column. Phys. Fluids 2015, 27, 113303. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Approach NS | Phases | Coupling | Interface Capture | Morphological Change | Turbulence Closure | Comments |
|---|---|---|---|---|---|---|---|---|
| Ahmad et al. [69] | 2020 | RANS | Water-sediment | Two-way | None | LSM | ||
| Li et al. [79] | 2020 | RANS | Water-sediment | Two-way | None | LSM | Morphological model mesh variation | |
| Klonaris et al. [81] | 2020 | Boussinesq equation | Water-sediment | One-way | None | None | None | Different governing eqs for the wave module |
| Ahmad et al. [75] | 2019 | RANS | Air-water-sediment | Two-way | LSM | LSM | ||
| Baykal et al. [76] | 2017 | RANS | Water-sediment | Two-way | None | Mesh deformation | Mesh deforms based on depositions - Exner’s Equation | |
| Tofany et al. [71] | 2014 | RANS | Air-water-sediment | One-way | VOF | None | Simple model in Matlab. Turbulent model used not suitable for bottom boundary layer |
| Author | Year | Approach NS | Phases | Coupling | Interface Capture | Turbulence Closure | Inertial Terms | Rheological Model | Comments |
|---|---|---|---|---|---|---|---|---|---|
| Jeng et al. [106] | 2021 | VARANS | Air-water- -sediment-structure | One-way | VOF | Not specified | u-p | Poro-elastic | Used a Radial Basis Function method to model the sediment (meshless method) |
| Zhao et al. [95] | 2020 | VARANS | Air-water-sediment | One-way | VOF | u-p | Poro-elastoplastic | ||
| Li et al. [84] | 2020 | RANS | Air-water-sediment | One-way | VOF | Not specified | u-p | Orthotropic poro-elastic | Anisotropic soil characteristics |
| Zhao et al. [105] | 2017 | RANS | Air-water-sediment | One-way | VOF | u-p | Poro-elastic | ||
| Ye et al. [94] | 2017 | RANS | Air-water-sediment | One-way | VOF | Not specified | u-p | Poro-elastoplastic | 3D domain with an impermeable breakwater |
| Elsaftu and Oumeraci | 2016 | VARANS | Air-water-sediment | One-way | VOF | Not specified | Full u-p quasi-static | Poro-elastoplastic | |
| Lin et al. [103] | 2016 | RANS | Air-water-sediment | One-way | LSM | Quasi-static | Poro-elastic | Used Finite Element Method | |
| Zhao and Jeng [92] | 2015 | VARANS | Water-sediment | One-way | - | Quasi-static | Poro-elastic | Add a phase-resolved shear stress model that accounts for oscillatory mechanisms | |
| Ye et al. [93] | 2015 | VARANS | Air-water- -sediment-structure | One-way | VOF | u-p | Poro-elastoplastic | Improved sediment modelling | |
| Jeng et al. [91] | 2013 | VARANS | Air-water-sediment | One-way | VOF | k model | u-p | Poro-elastic |
| Author | Year | Approach NS | Coupling | Interface Capture | Turbulence Closure | Particle Stresses | Comments |
|---|---|---|---|---|---|---|---|
| Ouda and Toorman [117] | 2019 | FANS | Mixture model | Modified VOF | Modified | Dense granular flow Lee et al. [119] | Compared and mixing length turbulence models |
| Cheng et al. [116] | 2017 | RANS | Two-way | None | Modified | Concentration dependent: - collisional theory - frictional component | Propose empirical turbulence modifications for flows with sediments |
| Lee et al. [110] | 2017 | RANS | Two-way | VOF | Modified | Lee et al. [115] plus in-house terms | Thorough closure of particle stresses |
| Lee et al. [115] | 2016 | FANS | Two-way | None | Modified with Low Re corrections | Follows Lee et al. [119] | Alternative solution algorithm that prevents domain division |
| Amoudry et al. [114] | 2008 | RANS | Two-way | None | Collisional theory | Propose empirical turbulence modifications for flows with sediments |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz-Carrasco, P.; Croquer, S.; Tamimi, V.; Lacey, J.; Poncet, S. Advances in Numerical Reynolds-Averaged Navier–Stokes Modelling of Wave-Structure-Seabed Interactions and Scour. J. Mar. Sci. Eng. 2021, 9, 611. https://doi.org/10.3390/jmse9060611
Díaz-Carrasco P, Croquer S, Tamimi V, Lacey J, Poncet S. Advances in Numerical Reynolds-Averaged Navier–Stokes Modelling of Wave-Structure-Seabed Interactions and Scour. Journal of Marine Science and Engineering. 2021; 9(6):611. https://doi.org/10.3390/jmse9060611
Chicago/Turabian StyleDíaz-Carrasco, Pilar, Sergio Croquer, Vahid Tamimi, Jay Lacey, and Sébastien Poncet. 2021. "Advances in Numerical Reynolds-Averaged Navier–Stokes Modelling of Wave-Structure-Seabed Interactions and Scour" Journal of Marine Science and Engineering 9, no. 6: 611. https://doi.org/10.3390/jmse9060611
APA StyleDíaz-Carrasco, P., Croquer, S., Tamimi, V., Lacey, J., & Poncet, S. (2021). Advances in Numerical Reynolds-Averaged Navier–Stokes Modelling of Wave-Structure-Seabed Interactions and Scour. Journal of Marine Science and Engineering, 9(6), 611. https://doi.org/10.3390/jmse9060611