
Identification of Ship Hydrodynamic Derivatives Based on LS-SVM with Wavelet Threshold Denoising


Abstract
:1. Introduction
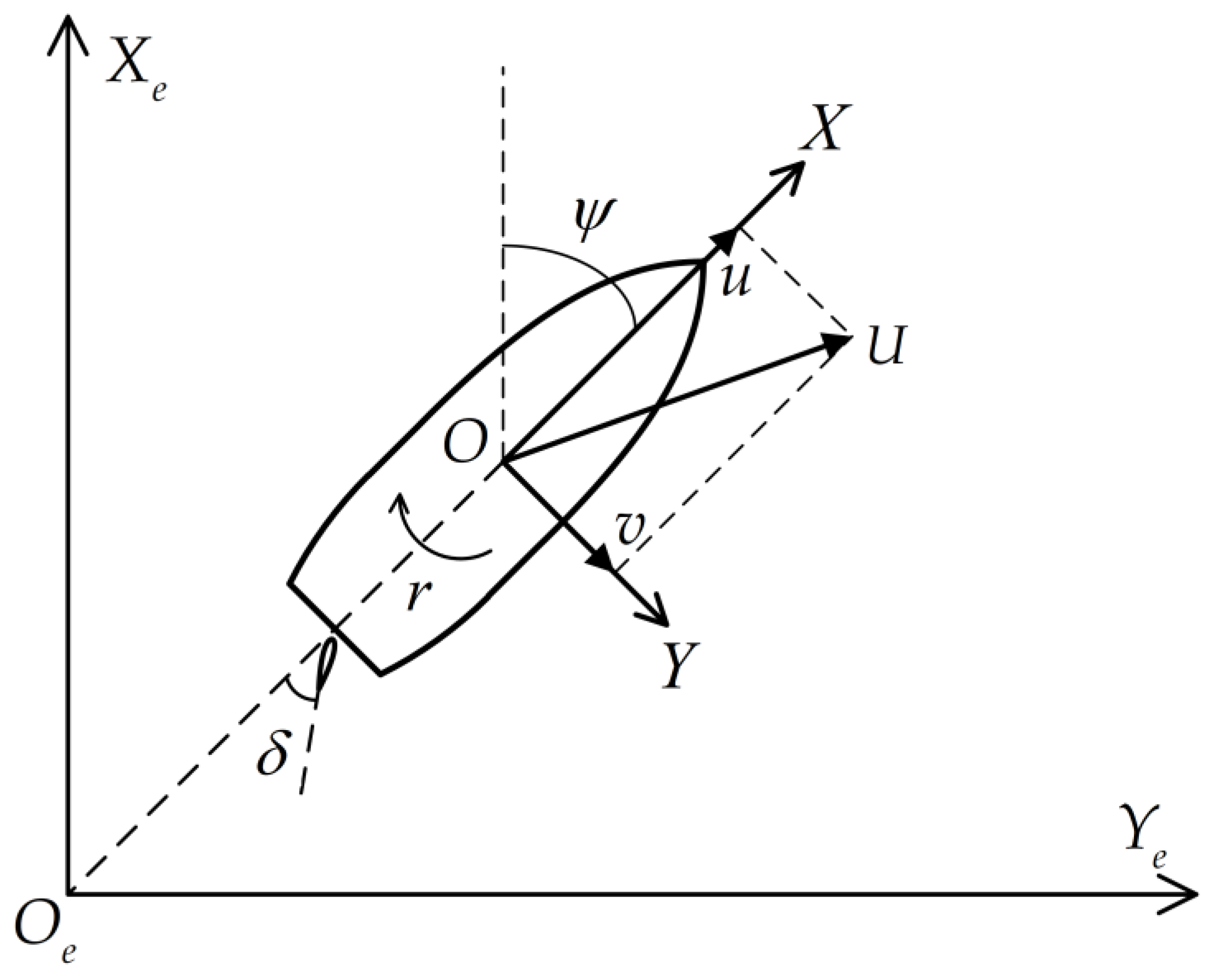
2. Mathematical Model of Ship Manoeuvring Motion
3. Least-Squares Support-Vector Machine
4. Case Study
4.1. Construction of Regression Model
4.2. Identification
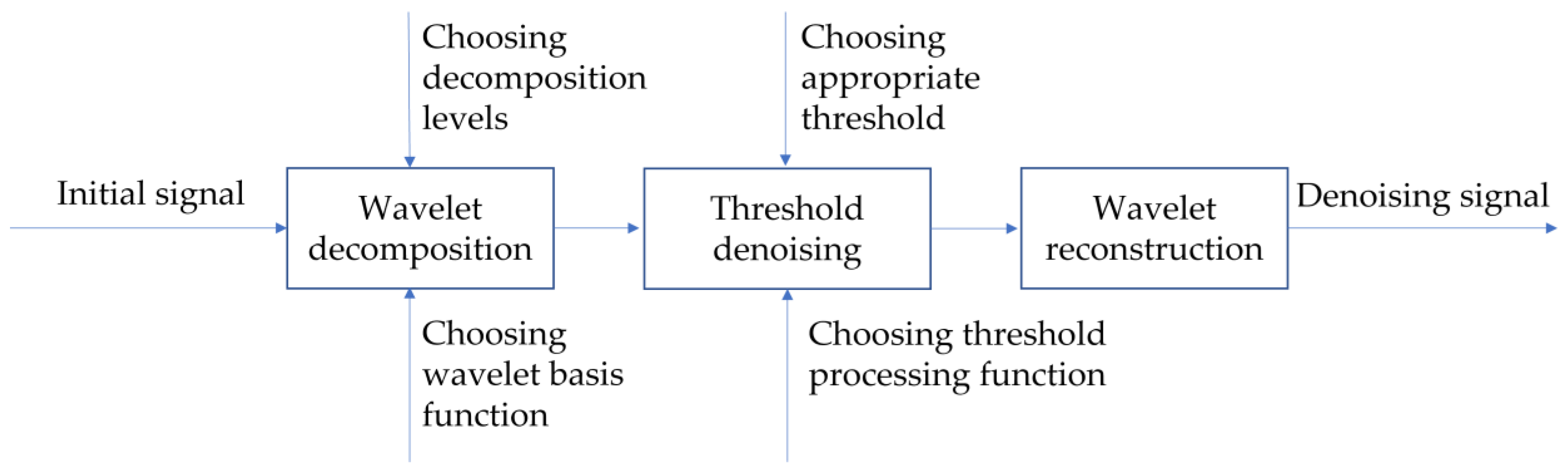
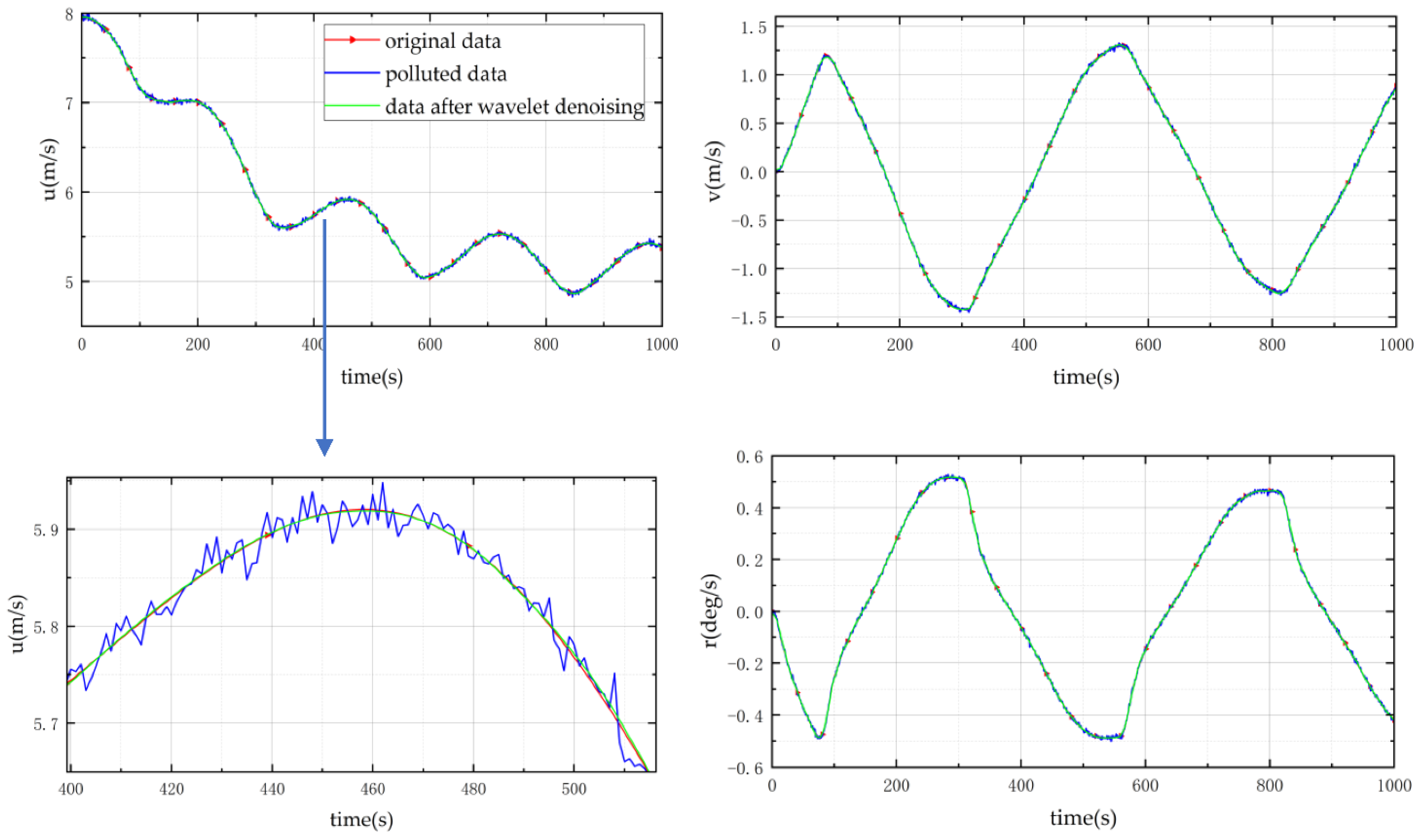
4.3. Wavelet Threshold Denoising
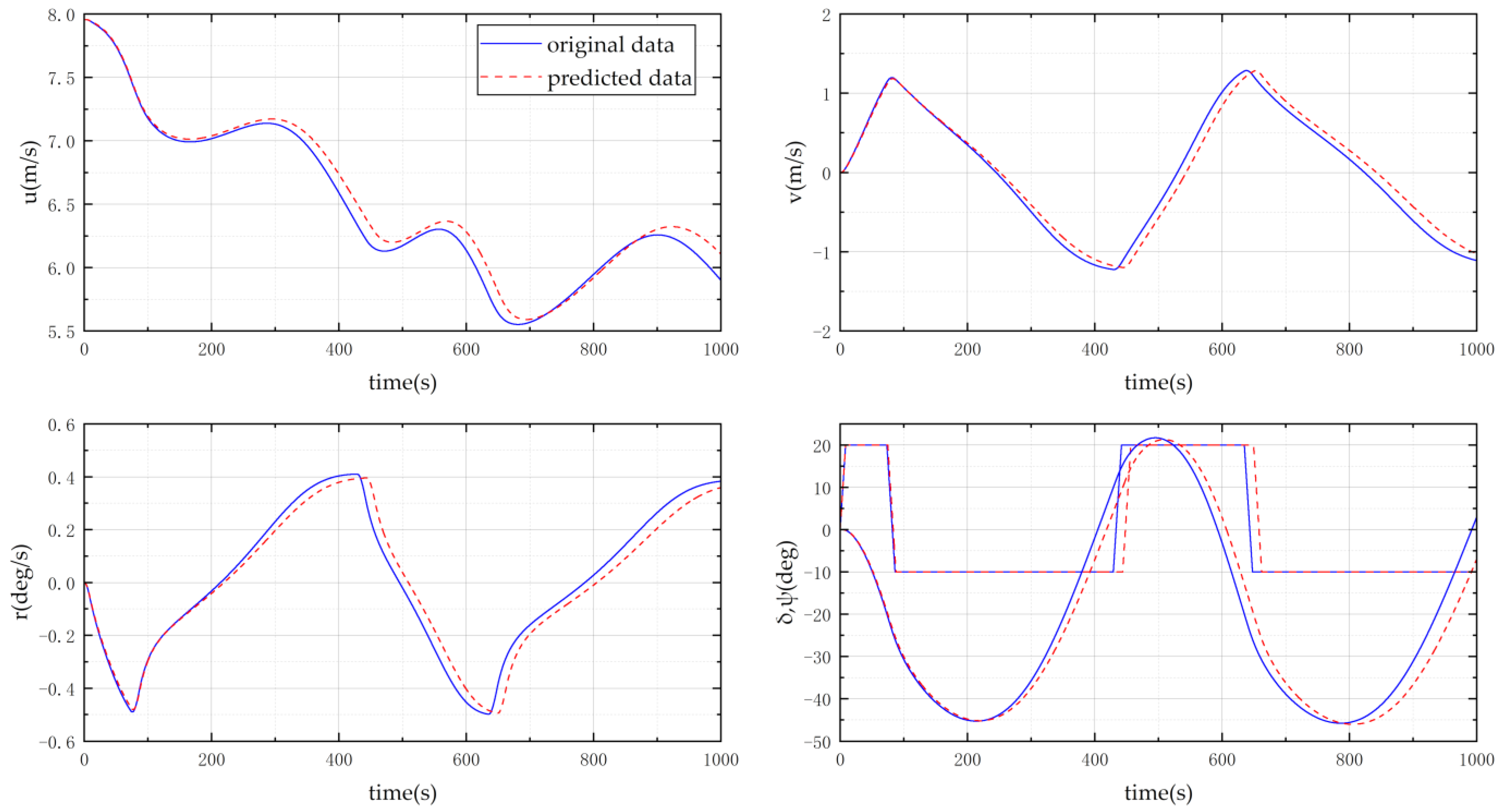
4.4. Model Validation
5. Conclusions
- More efforts are needed to reduce parameter drift, as the influence of parameter drift on identification accuracy remains considerable.
- The selection of some parameters for wavelet threshold denoising still depends on experience. How to better determine decomposition layer number and wavelet threshold during noise filtering is a key problem to be figured out.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Maritime Organization (IMO). Standards for ship manoeuvrability. Resol. MSC 2002, 137, 76. [Google Scholar]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics—Steering and Manoeuvrability; Hydro-and Aerodynamic Laboratory: Lyngby, Denmark, 1964. [Google Scholar]
- Nagumo, J.; Noda, A. A learning method for system identification. IEEE Trans. Autom. Control 1967, 12, 282–287. [Google Scholar] [CrossRef]
- Holzhüter, T. Robust Identification Scheme in an Adaptive Track-Controller for Ships. IFAC Proc. Vol. 1990, 23, 461–466. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Measurement of Hydrodynamic Characteristics from Ship Maneuvering Trials by System Identification. SNAME Trans. 1980, 88, 283–318. [Google Scholar]
- Zhou, W.; Blanke, M. Identification of a class of nonlinear state-space models using RPE techniques. IEEE Trans. Autom. Control 1989, 34, 312–316. [Google Scholar] [CrossRef] [Green Version]
- Moreira, L.; Guedes Soares, C. Recursive Neural Network Model Of Catamaran Manoeuvring. Int. J. Marit. Eng. 2012, 154, A-121. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Ji, C.; Xue, G. Hydrodynamic parameter identification for ship manoeuvring mathematical models using a Bayesian approach. Ocean Eng. 2020, 195, 106612. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. An algorithm for offline identification of ship manoeuvring mathematical models from free-running tests. Ocean Eng. 2014, 79, 10–25. [Google Scholar] [CrossRef]
- Luo, W.L.; Zou, Z.J. Parametric identification of ship maneuvering models by using support vector machines. J. Ship Res. 2009, 53, 19–30. [Google Scholar] [CrossRef]
- Luo, W.; Guedes Soares, C.; Zou, Z. Parameter Identification of Ship Maneuvering Model Based on Support Vector Machines and Particle Swarm Optimization. J. Offshore Mech. Arct. Eng. 2016, 138, 031101. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.-Q.; Bolles, A. Identification-based simplified model of large container ships using support vector machines and artificial bee colony algorithm. Appl. Ocean Res. 2017, 68, 249–261. [Google Scholar] [CrossRef]
- Zhang, X.; Zou, Z. Identification of Abkowitz model for ship manoeuvring motion using ε-support vector regression. J. Hydrodyn. Ser. B 2011, 23, 353–360. [Google Scholar] [CrossRef]
- Liu, Y.; Xue, Y.; Huang, S.; Xue, G.; Jing, Q. Dynamic Model Identification of Ships and Wave Energy Converters Based on Semi-Conjugate Linear Regression and Noisy Input Gaussian Process. J. Mar. Sci. Eng. 2021, 9, 194. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Xue, G.; Chen, G. Identification and Prediction of Ship Maneuvering Motion Based on a Gaussian Process with Uncertainty Propagation. J. Mar. Sci. Eng. 2021, 9, 804. [Google Scholar] [CrossRef]
- Xu, H.; Guedes Soares, C. Manoeuvring modelling of a containership in shallow water based on optimal truncated nonlinear kernel-based least square support vector machine and quantum-inspired evolutionary algorithm. Ocean Eng. 2020, 195, 106676. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. Mathematical Models for Simulation of Manoeuvring Performance of Ships. Mar. Technol. Eng. 2011, 2011, 661–698. [Google Scholar]
- Xue, Y.; Liu, Y.; Ji, C.; Xue, G.; Huang, S. System identification of ship dynamic model based on Gaussian process regression with input noise. Ocean Eng. 2020, 216, 107862. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Z.; Guedes Soares, C. Identification of ship manoeuvring motion based on nu-support vector machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Hwang, W.-Y. Application of System Identification to Ship Maneuvering. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1980. [Google Scholar]
- Shenoi, R.R.; Krishnankutty, P.; Selvam, R.P. Sensitivity Study of Hydrodynamic Derivative Variations on the Maneuverability Prediction of a Container Ship. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015; p. V007T006A008. [Google Scholar]
- Yoon, H.K.; Rhee, K.P. Identification of hydrodynamic coefficients in ship maneuvering equations of motion by Estimation-Before-Modeling technique. Ocean Eng. 2003, 30, 2379–2404. [Google Scholar] [CrossRef]
- Luo, W.; Li, X. Measures to diminish the parameter drift in the modeling of ship manoeuvring using system identification. Appl. Ocean Res. 2017, 67, 9–20. [Google Scholar] [CrossRef]
- Luo, W. Parameter Identifiability of Ship Manoeuvring Modeling Using System Identification. Math. Probl. Eng. 2016, 2016, 8909170. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Johnstone, I.M. Adapting to Unknown Smoothness via Wavelet Shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200–1224. [Google Scholar] [CrossRef]
- Zhang, X.-G.; Zou, Z.-J. Application of wavelet denoising in the modeling of ship manoeuvring motion. Chuan Bo Li Xue/J. Ship Mech. 2011, 15, 616–622. [Google Scholar]
- Suykens, J.A.K.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Suykens, J.; Gestel, T.V.; Brabanter, J.D.; Moor, B.D.; Vandewalle, J. Least Squares Support Vector Machines; World Scientific: Singapore, 2002. [Google Scholar]
- Yao, J.; Liu, Z.; Song, X.; Su, Y. Ship manoeuvring prediction with hydrodynamic derivatives from RANS: Development and application. Ocean Eng. 2021, 231, 109036. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, J.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Length between perpendiculars | 320.00 m |
| Breadth | 58.00 m |
| Design draft | 20.80 m |
| Block coefficient | 0.81 |
| ) | 11.136 m |
| ) | |
| Rudder turning rate | |
| Approach speed | 7.956 m/s |
| X-Coef. | Original | LS-SVM | Y-Coef. | Original | LS-SVM | N-Coef. | Original | LS-SVM |
|---|---|---|---|---|---|---|---|---|
| −0.0022 | −0.0022 | −0.01902 | −0.0190 | −0.007886 | −0.00788 | |||
| 0.0015 | 0.0015 | 0.000639 | 0.000637 | −0.000308 | −0.000308 | |||
| 0.00159 | 0.00159 | −0.1287 | −0.1232 | 0.00175 | 0.0028 | |||
| 0.000338 | 0.000337 | 0.005719 | 0.0057 | −0.003701 | −0.0037 | |||
| 0.01391 | 0.0139 | −0.000002 | −0.000002 | −0.000002 | −0.000002 | |||
| −0.00272 | −0.0027 | −0.000048 | 0.00061 | −0.000707 | −0.00053 | |||
| 0.001609 | 0.0016 | −0.02429 | −0.0203 | 0.003726 | 0.0047 | |||
| −0.001034 | −0.0010 | 0.0211 | 0.0291 | −0.019 | −0.017 | |||
| 0.00408 | 0.0041 | −0.001834 | −0.0018 | |||||
| −0.000114 | −0.000114 | −0.000056 | −0.000056 | |||||
| −0.003059 | −0.0031 | 0.001426 | 0.0014 | |||||
| −0.00456 | −0.0046 | 0.00232 | 0.0023 | |||||
| 0.00326 | 0.0029 | −0.001504 | −0.0016 | |||||
| 0.003018 | 0.0032 | −0.001406 | −0.0014 | |||||
| −0.002597 | −0.0028 | 0.001191 | 0.0011 | |||||
| 0.000895 | 0.000833 | −0.000398 | −0.000396 |
| X-Coef. | Original | Denoising | Y-Coef. | Original | Denoising | N-Coef. | Original | Denoising |
|---|---|---|---|---|---|---|---|---|
| −0.0022 | −0.0023 | −0.01902 | −0.0199 | −0.007886 | −0.0078 | |||
| 0.0015 | 0.0014 | 0.000639 | 0.000455 | −0.000308 | −0.000416 | |||
| 0.00159 | 0.0014 | −0.1287 | −0.0526 | 0.00175 | 0.0076 | |||
| 0.000338 | 0.0003 | 0.005719 | 0.0053 | −0.003701 | −0.0038 | |||
| 0.01391 | 0.014 | −0.000002 | 0.00004 | −0.000002 | 0.000022 | |||
| −0.00272 | −0.0021 | −0.000048 | −0.0027 | −0.000707 | 0.0012 | |||
| 0.001609 | 0.0037 | −0.02429 | −0.0349 | 0.003726 | 0.0097 | |||
| −0.001034 | 0.00009 | 0.0211 | 0.0553 | −0.019 | −0.0095 | |||
| 0.00408 | 0.0035 | −0.001834 | −0.0017 | |||||
| −0.000114 | −0.00024 | −0.000056 | −0.000047 | |||||
| −0.003059 | 0.001 | 0.001426 | 0.00074 | |||||
| −0.00456 | −0.0047 | 0.00232 | 0.0022 | |||||
| 0.00326 | 0.0100 | −0.001504 | −0.00028 | |||||
| 0.003018 | 0.0204 | −0.001406 | −0.001 | |||||
| −0.002597 | −0.00046 | 0.001191 | 0.0023 | |||||
| 0.000895 | −0.00053 | −0.000398 | −0.0002 |
| Surge speed | 0.0859 | 0.0744 | 0.2013 |
| Sway speed | 0.1163 | 0.1090 | 0.0527 |
| Yaw rate | 0.0462 | 0.0458 | 0.0160 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Song, L.; Liu, Z.; Yao, J. Identification of Ship Hydrodynamic Derivatives Based on LS-SVM with Wavelet Threshold Denoising. J. Mar. Sci. Eng. 2021, 9, 1356. https://doi.org/10.3390/jmse9121356
Hu Y, Song L, Liu Z, Yao J. Identification of Ship Hydrodynamic Derivatives Based on LS-SVM with Wavelet Threshold Denoising. Journal of Marine Science and Engineering. 2021; 9(12):1356. https://doi.org/10.3390/jmse9121356
Chicago/Turabian StyleHu, Yi, Lifei Song, Zuyuan Liu, and Jianxi Yao. 2021. "Identification of Ship Hydrodynamic Derivatives Based on LS-SVM with Wavelet Threshold Denoising" Journal of Marine Science and Engineering 9, no. 12: 1356. https://doi.org/10.3390/jmse9121356
APA StyleHu, Y., Song, L., Liu, Z., & Yao, J. (2021). Identification of Ship Hydrodynamic Derivatives Based on LS-SVM with Wavelet Threshold Denoising. Journal of Marine Science and Engineering, 9(12), 1356. https://doi.org/10.3390/jmse9121356