
Numerical Research on Global Ice Loads of Maneuvering Captive Motion in Level Ice

Abstract
:1. Introduction
2. Calculation Method of Ice Loads
2.1. Calculation of Icebreaking Forces Fbre
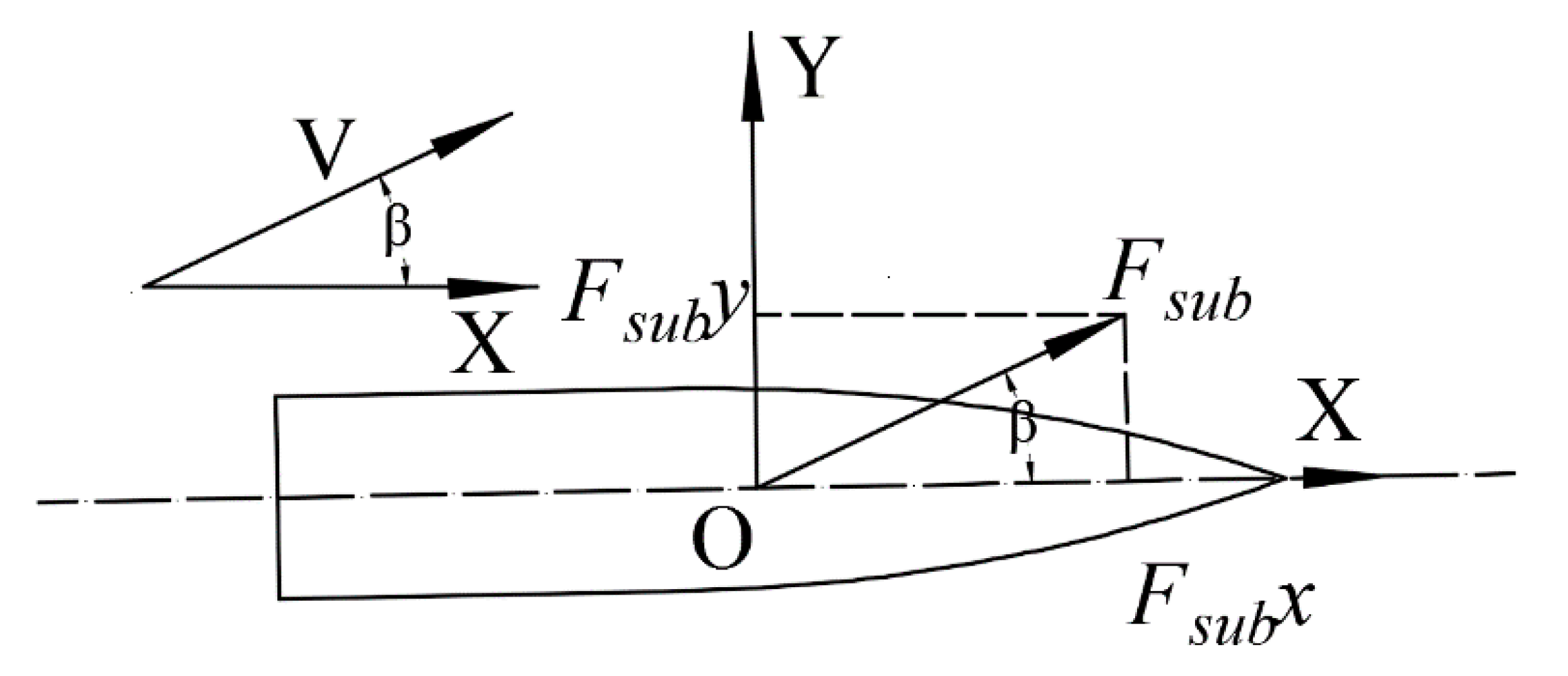
2.2. Calculation of Submersion Forces Fsub
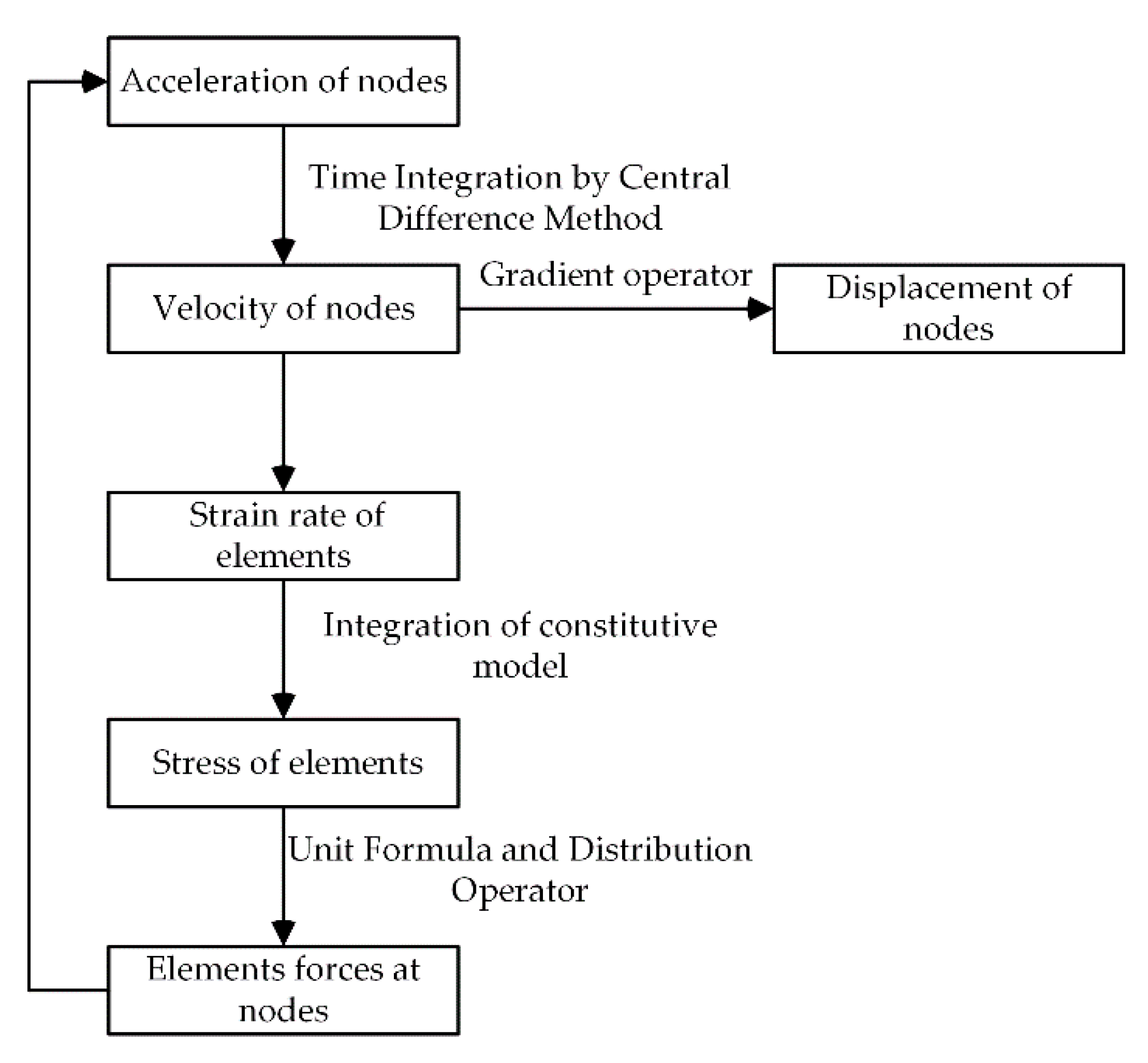
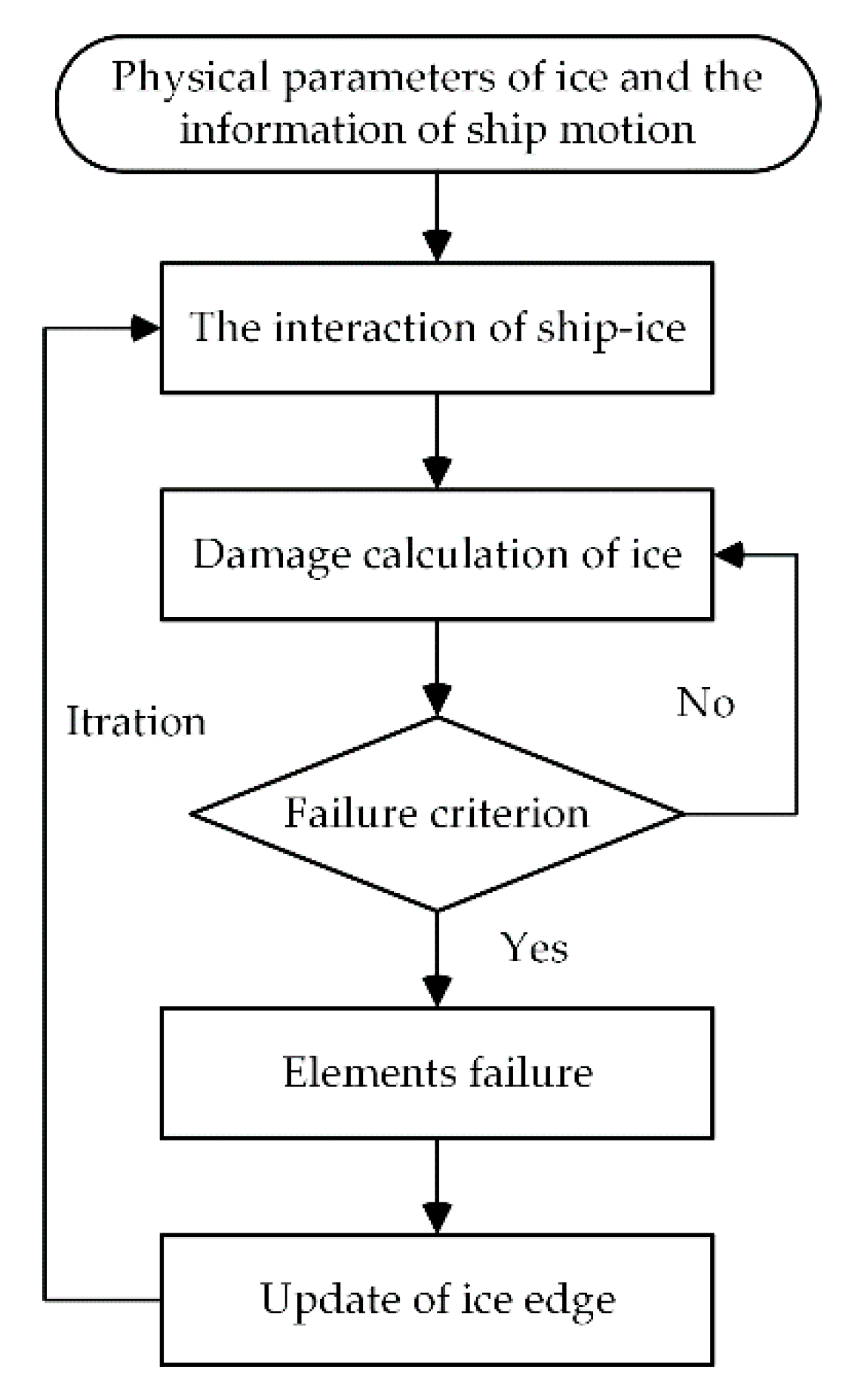
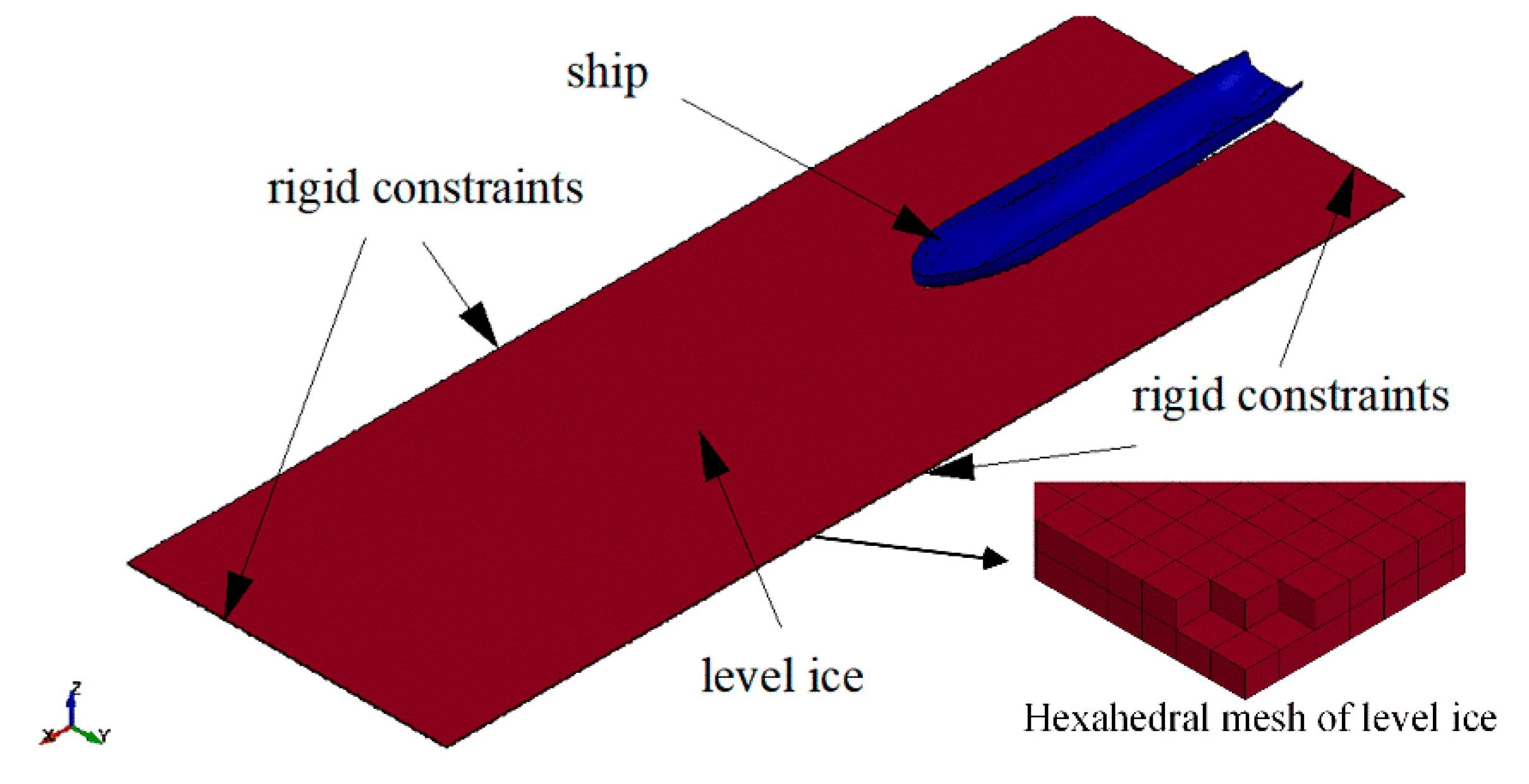
3. Finite Element Numerical Model
4. Verification of the Numerical Method
4.1. Verification of Calculation Method by Icebreaker Araon Model Test
4.2. Analysis of a Typical Direct Motion
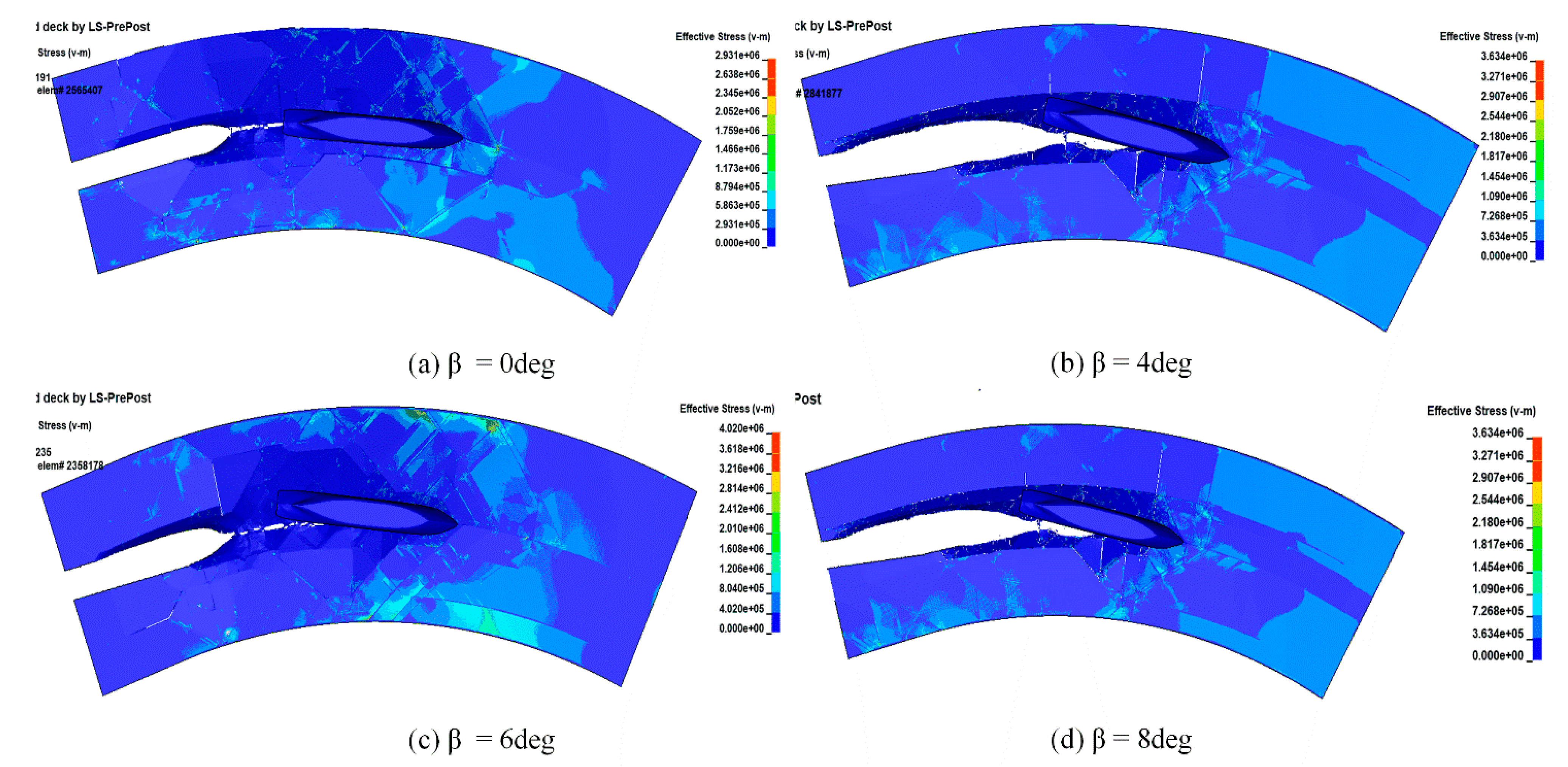
5. Numerical Calculation of Ice Loads in Oblique Motion
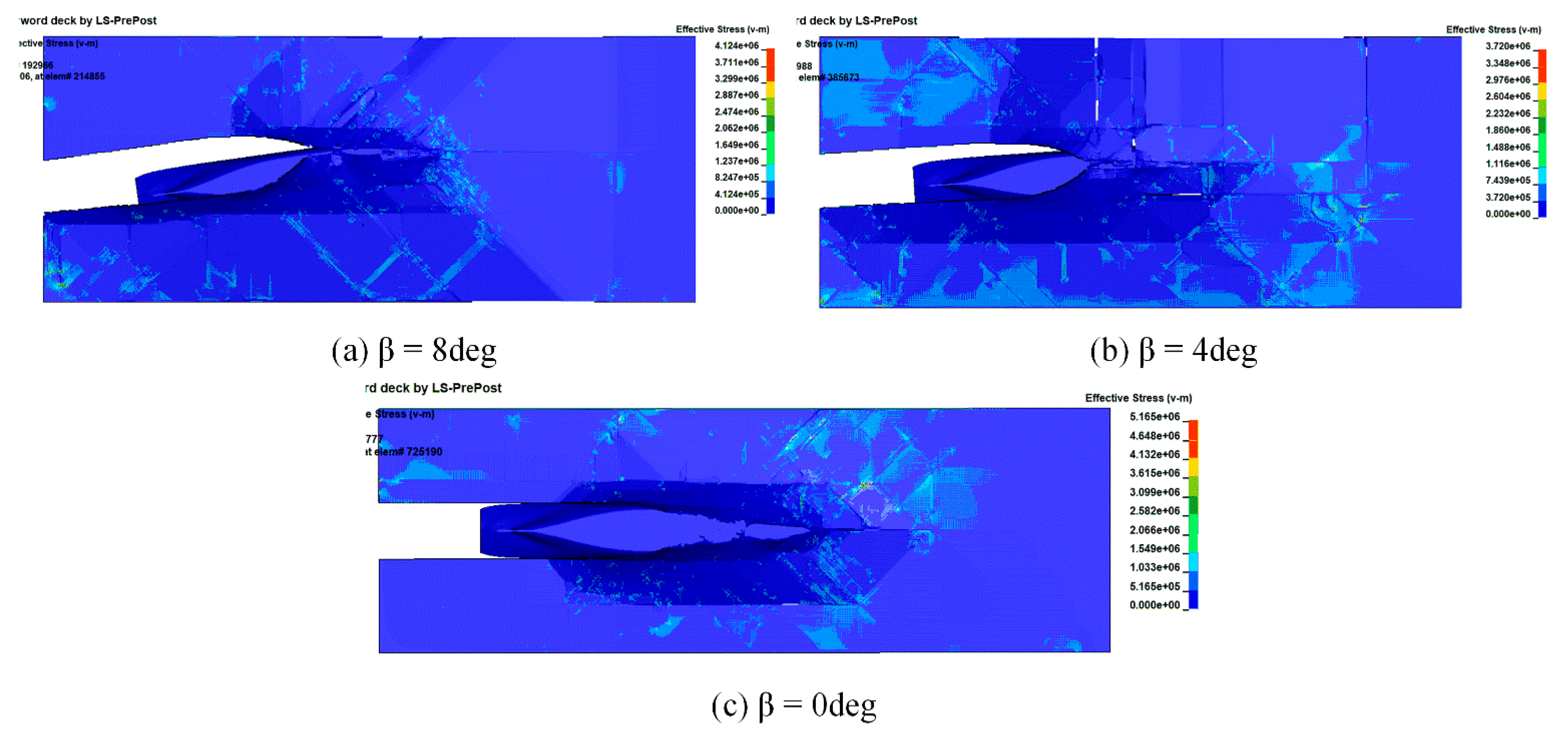
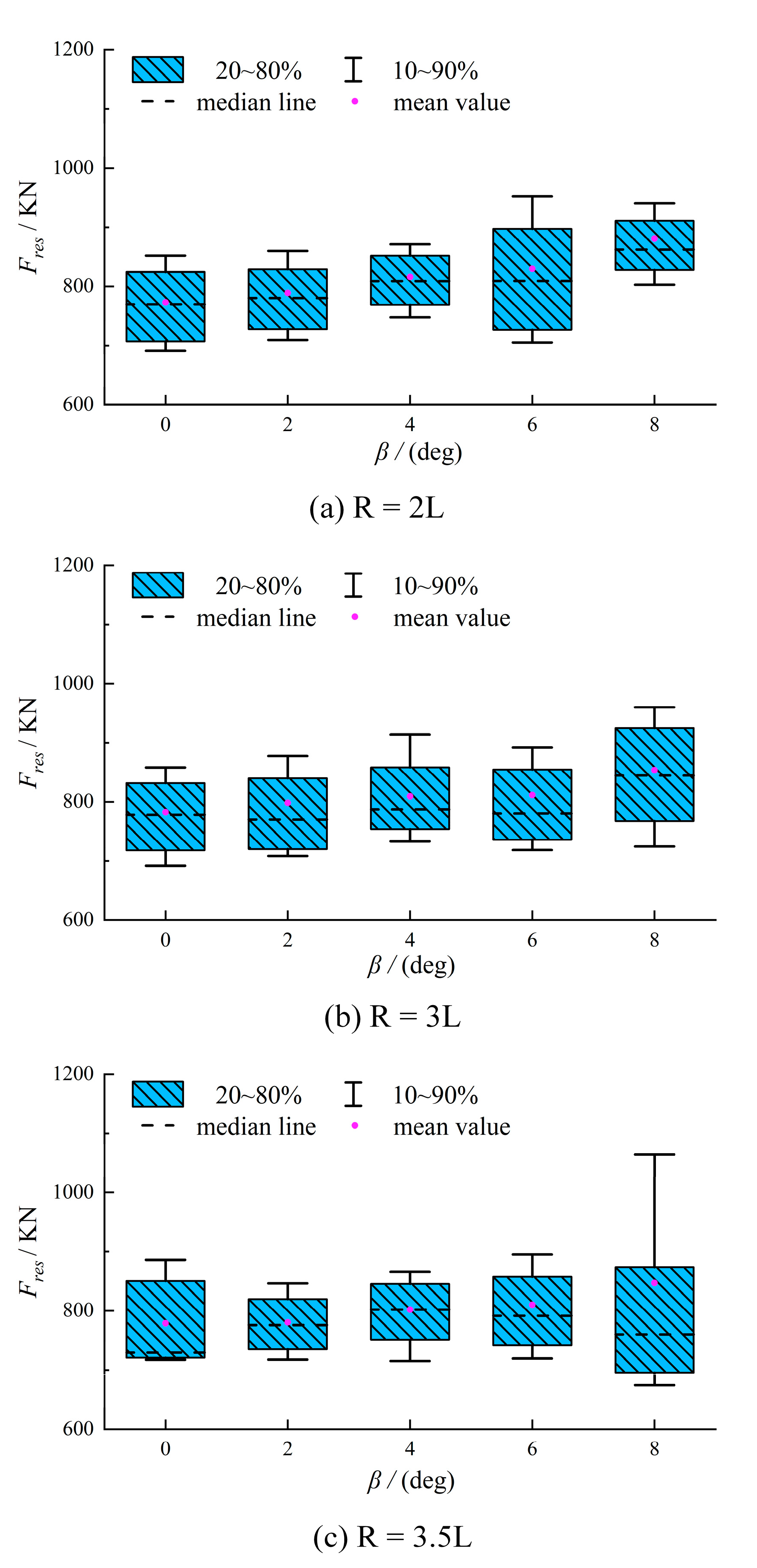
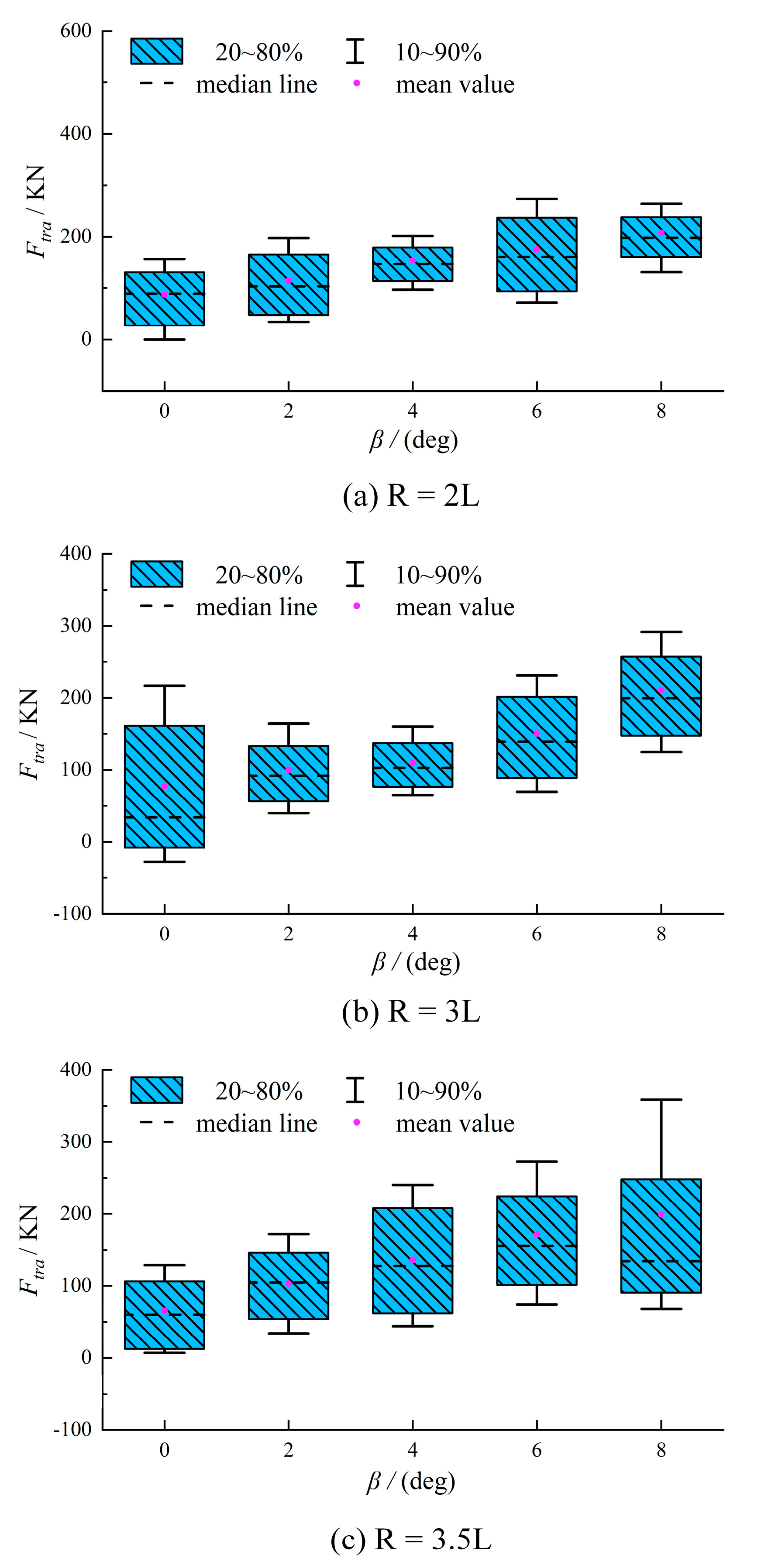
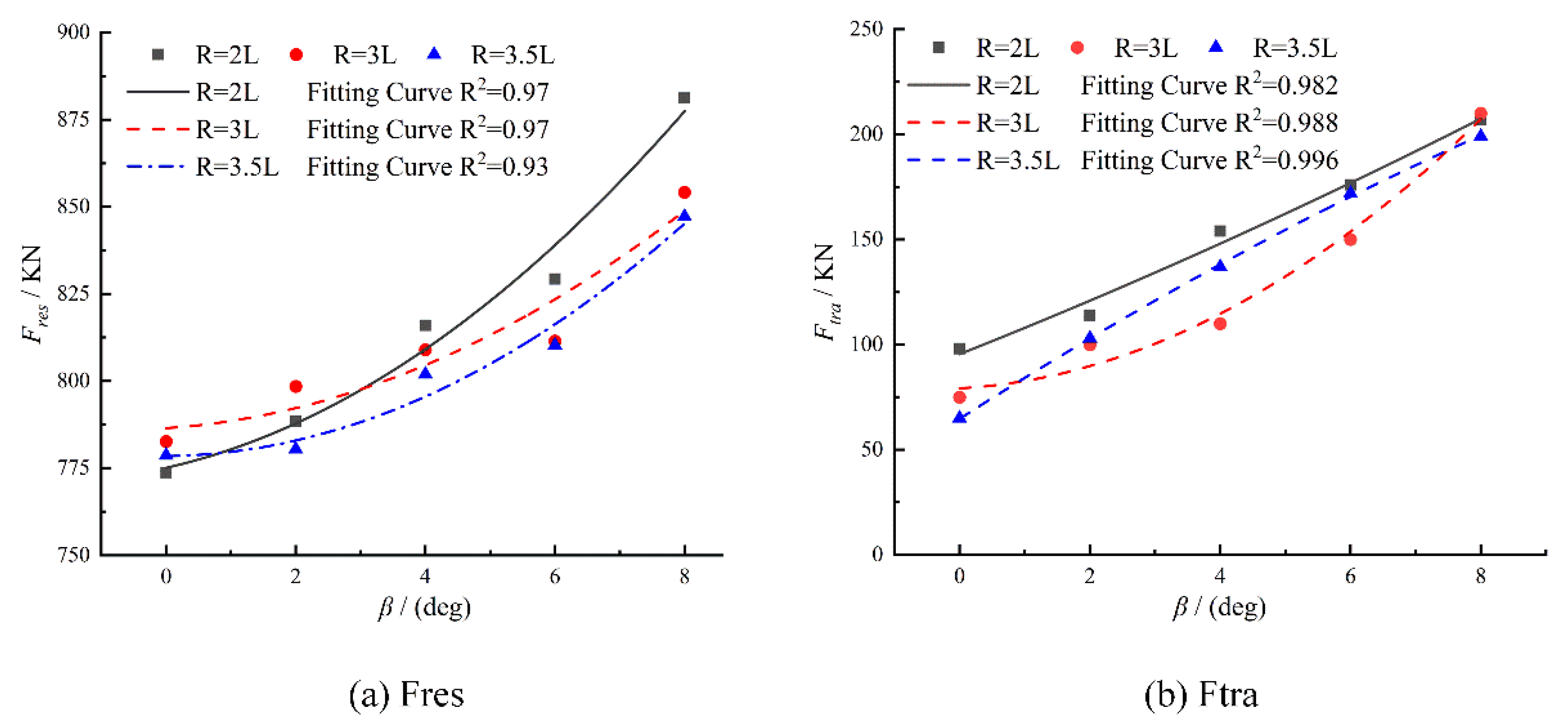
6. Numerical Calculation of Ice Loads in Constant Radius Motion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Beveridge, L.; Fournier, M.; Lasserre, F.; Huang, L.; Têtu, P.-L. Interest of Asian shipping companies in navigating the Arctic. Polar Sci. 2016, 10, 404–414. [Google Scholar] [CrossRef]
- Melia, N.; Haines, K.; Hawkins, E. Sea ice decline and 21st century trans-Arctic shipping routes. Geophys. Res. Lett. 2016, 43, 9720–9728. [Google Scholar] [CrossRef]
- Kashteljan, V.I.; Poznyak, I.I.; Ryvlin, A.Y. Resistance to Motion of a Ship; Sudostroyeniye: Leningrad, Russia, 1968. [Google Scholar]
- Shimansky, J.A. Conditional Standards of Ice Qualities of a Ship; Marine Computer Application Corporation: New York, NY, USA, 1969. [Google Scholar]
- Enkvist, E. On the Ice Resistance Encountered by Ships Operating in the Continuous Mode of Icebreaking; Swedish Academy of Engineering Sciences: Helsinki, Finland, 1972. [Google Scholar]
- Lindqvist, G. A straightforward method for calculation of ice resistance of ships. In Proceedings of the 10th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC), Luleå, Sweden, 12–16 June 1989; pp. 722–735. [Google Scholar]
- Lindstrom, C.A. Numerical simulation of ship manoeuvring motion in level ice. In Proceedings of the POLARTECH’90, Copenhagen, Denmark, 14–16 August 1990; pp. 198–208. [Google Scholar]
- Lindstrom, C.A. Numerical estimation of ice forces acting on inclined structures and ships in level ice. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7–10 May 1990. [Google Scholar]
- Menon, B.; Edgecombe, M.; Tue-fee, K. Maneuvering Tests in Ice aboard Uscgc Polar Star in Antarctica 1985; National Defense Transportation Association: Alexandria, VA, USA, 1986; Volume 46, pp. 30–32. [Google Scholar]
- Menon, B.; Steele, M.; Samwel, L. Development of a Canadian Arctic Bridge Navigation Simulator: Validation of a Ship-Handling Model; Transportation Development Centre of Transport Canada, Fleet Technology Limited, Arctec Canada Limited: Leggett Drive, ON, Canada, 1988.
- Menon, B.; Glen, I.; Steele, M.; Hardiman, K. Investigation of Ship Maneuverability in Ice-Phase I; Transport Canada: Ottawa, ON, Canada, 1991.
- Tue-Fee, K.K.; Keinonen, A.J. Full-scale maneuvering tests in level ice of Canmar Kigoriak and Robert Lemeur. Mar. Technol. SNAME News 1986, 23, 131–138. [Google Scholar] [CrossRef]
- Tue-Fee, K.K.; Keinonen, A.J.; Menon, B.C. Model for Predicting Steady Turning Performance of Conventional Icebreakers in Level Unbroken Ice. In Proceedings of the International Conference on Ship Manoeuvrability—Prediction and Achievement, Hilton Hotel, London, UK, 29 April–1 May 1987. [Google Scholar]
- Williams, F.; Spencer, D.; Gagnon, B.; Everard, J.; Butt, S.; Parsons, B.L.; Hackett, P.J.; Institute for Marine Dynamics (Canada). Full-Scale Ice Breaker Trials CCGS Sir John Franklin Indian Arm/Little Burnt Bay 1991; National Research Council Canada: St. John’s, NL, Canada, 1991. [Google Scholar]
- Williams, F.M.; Waclawek, P. Physical Model Tests for Ship Maneuvering in Ice. In Proceedings of the 25th American Towing Tank Conference, Lowa City, IA, USA, 24–25 September 1998. [Google Scholar]
- Williams, F.M.; Waclawek, P.; Hyunsoo, K. Simulation of Maneuvering in Ice. In IMD-SAMSUNG Collaborative Project Status Report; Institute for Ocean Technology: St. John’s, NL, Canada, 2006. [Google Scholar]
- Wang, S. A Dynamic Model for Breaking Pattern of Level Ice by Conical Structures; Helsinki University of Technology: Espoo, Finland, 2001. [Google Scholar]
- Martio, J. Numerical Simulation of Vessel’s Manoeuvring Performance in Uniform Ice; Helsinki University of Technology Ship Laboratory: Espoo, Finland, 2007. [Google Scholar]
- Nguyen, D.T.; Sørbø, A.H.; Sørensen, A.J. Modelling and control for dynamic positioned vessels in level ice. IFAC Proc. Vol. 2009, 42, 229–236. [Google Scholar] [CrossRef]
- Liu, J.; Lau, M.; Williams, F.M. Mathematical modeling of ice-hull interaction for ship maneuvering in ice simulations. In Proceedings of the 7th International Conference and Exhibition on Performance of Ships and Structures in Ice (ICETECH), Banff, AB, Canada, 16–19 July 2006; p. 845. [Google Scholar]
- Liu, J.; Lau, M.; Williams, M.F. Numerical implementation and benchmark of ice-hull interaction model for ship manoeuvring simulations. In Proceedings of the 19th IAHR International Symposium on Ice, Vancouver, BC, Canada, 6–11 July 2008. [Google Scholar]
- Liu, J. Mathematical Modeling Ice-Hull Interaction for Real Time Simulations of Ship Manoeuvring in Level Ice; Memorial University of Newfoundland: St. John’s, NL, Canada, 2009. [Google Scholar]
- Lau, M. Ship manoeuvring-in-ice modeling software OSIS-IHI. In Proceedings of the 21st International Conference on Port and Ocean Engineering Under Arctic Conditions, Montréal, RQ, Canada, 10–14 July 2011. [Google Scholar]
- Su, B.; Riska, K.; Moan, T. Numerical simulation of ship turning in level ice. In Proceedings of the 29th International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 June 2010; Volume 4, pp. 751–758. [Google Scholar]
- Zhou, L.; Su, B.; Riska, K.; Moan, T. Numerical simulation of moored ship in level ice. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 1, pp. 855–863. [Google Scholar]
- Tan, X.; Su, B.; Riska, K.; Moan, T. A six-degrees-of-freedom numerical model for level ice–ship interaction. Cold Reg. Sci. Technol. 2013, 92, 1–16. [Google Scholar] [CrossRef]
- Zhou, Q.; Peng, H. Numerical simulation of a dynamically controlled ship in level ice. Int. J. Offshore Polar Eng. 2014, 24, 184–191. [Google Scholar]
- Riska, K. Performance of Merchant Vessels in Ice in the Baltic; Sjöfartsverket: Luleå, Sweden, 1997.
- Vance, G.P. Analysis of the Performance of a 140-Foot Great Lakes Icebreaker: USCGC Katmai Bay; Cold Regions Research and Engineering Laboratory: Hanover, NH, USA, 1980. [Google Scholar]
- Zhou, L.; Riska, K.; Von Bock und Polach, R.U.F.; Moan, T.; Su, B. Experiments on level ice loading on an icebreaking tanker with different ice drift angles. Cold Reg. Sci. Technol. 2013, 85, 79–93. [Google Scholar]
- Zhou, L.; Chuang, Z.; Ji, C. Ice forces acting on towed ship in level ice with straight drift. Part I: Analysis of model test data. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 60–68. [Google Scholar] [CrossRef]
- Zhou, L.; Chuang, Z.; Bai, X. Ice forces acting on towed ship in level ice with straight drift. Part II: Numerical simulation. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 119–128. [Google Scholar] [CrossRef]
- Derradji-Aount, A.; Thiel, A. Terry Fox Resistance Tests-Phase Ⅲ (PMM) Testing ITTC Experimental Uncertainty Analysis Initiative; Institute for Ocean Technology: St. John’s, NL, Canada, 2004. [Google Scholar]
- Derradji-Aount, A.; Izumiyama, K.; Yamaguchi, H.; Wilkman, G. Experimental Uncertainty Analysis for Ice Tank Ship Resistance Experiments Using a Model for a Canadian Icebreaker Terry Fox. Ocean. Eng. Int. 2004, 8, 49–68. [Google Scholar]
- Spencer, D.S.; Timco, G.W. CD model ice—A process to produce correct density (CD) model ice. In Proceedings of the 10th International IAHR Symposium on Ice, Espoo, Finland, 23–27 August 1993; Volume 2, pp. 745–755. [Google Scholar]
- Wu, W. Model Tests on Ice Resistance of an Icebreaking Ships with Different Ice Drift Angles; Tianjin University: Tianjin, China, 2017. [Google Scholar]
- Lau, M. Discrete element modeling of ship manoeuvring in ice. In Proceedings of the 18th International Symposium on Ice, Sapporo, Japan, 28 August–1 September 2006. [Google Scholar]
- Zhan, D.; Agar, D.; He, M.; Spencer, D.; Molyneux, D. Numerical simulation of ship maneuvering in pack ice. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 855–862. [Google Scholar]
- Zhan, D.; Molyneux, D. 3-dimensional numerical simulation of ship motion in pack ice. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; Volume 6, pp. 407–414. [Google Scholar]
- Li, F.; Kotilainen, M.; Goerlandt, F.; Kujala, P. An extended ice failure model to improve the fidelity of icebreaking pattern in numerical simulation of ship performance in level ice. Ocean. Eng. 2019, 176, 169–183. [Google Scholar] [CrossRef]
- Li, F.; Goerlandt, F.; Kujala, P. Numerical simulation of ship performance in level ice: A framework and a model. Appl. Ocean. Res. 2020, 102, 102288. [Google Scholar] [CrossRef]
- Hajivand, A.; Mousavizadegan, S.H. Virtual simulation of maneuvering captive tests for a surface vessel. Int. J. Nav. Archit. Ocean. Eng. 2015, 7, 848–872. [Google Scholar] [CrossRef] [Green Version]
- Su, B. Numerical Predictions of Global and Local Ice Loads on Ships; Norwegian University of Science and Technology: Trondheim, Norway, 2011. [Google Scholar]
- Long, X. Discrete Element Analysis of Sea Ice Failure Mode and Ice Load during the Interaction with Marine Structure; Dalian University of Technology: Dalian, China, 2019. [Google Scholar]
- Xuan, S. Numerical Calculation of Ship Maneuvering Ice Load in Level Ice; Wuhan University of Technology: Wuhan, China, 2019. [Google Scholar]
- Hu, X. The Numerical Simulation of Ship Icebreaking and Navigating Based on FEM-SPH Coupling Algorithm; Wuhan University of Technology: Wuhan, China, 2016. [Google Scholar]
- Hu, X.; Zhan, C.S. Numerical simulation of ship ice breaking based on FEM-SPH coupling algorithm. JiangSu Ship 2015, 32, 9–13. [Google Scholar]
- Teng, M. Caculation and Numerical Simulation of the Ice Load on the Icebreaker; Harbin Engineering University: Harbin, China, 2014. [Google Scholar]
- Zhai, S. A Method for Numerical Simulation of the Icebreaker in the Process of Icebreaking; Harbin Engineering University: Harbin, China, 2014. [Google Scholar]
- Wang, J. Numerical Study on Ship Collision with Level Ice Based on Nonlinear Finite Element Method; Shanghai Jiao Tong University: Shanghai, China, 2015. [Google Scholar]
- Liu, Y. Study on the Structural Strength Evaluation and Optimization Design Method of the Ice Belt of the Polar Warship; Harbin Engineering University: Harbin, China, 2018. [Google Scholar]
- Jeong, S.-Y.; Choi, K.; Kang, K.-J.; Ha, J.-S. Prediction of ship resistance in level ice based on empirical approach. Int. J. Nav. Archit. Ocean. Eng. 2017, 9, 613–623. [Google Scholar] [CrossRef]
- Ashton, G.D. River and Lake Ice Engineering; Water Resources Publication: Littleton, CO, USA, 1986. [Google Scholar]
- Huang, Y.; Shi, Q.Z.; Song, A. The study of the scaling law in dynamic ice force model tests. China Offshore Oil Gas 2007, 6, 419–423. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value | Unit |
|---|---|---|---|
| Ice density | ρi | 880 | kg/m3 |
| Shear modulus | G | 2.02 | GPa |
| Bulk modulus | K | 5.26 | GPa |
| Failure pressure | Pf | –4 | Mpa |
| Yield stress | σs | 2.12 | Mpa |
| Poisson ratio | γ | 0.33 | - |
| Frictional coefficient | μi | 0.15 | - |
| Plastic failure strain | 0.15 | - |
| Parameters | Symbol | Value | Units |
|---|---|---|---|
| Elastic modulus | E | 5.40 | Gpa |
| Compressive strength of ice | σc | 2.30 | Mpa |
| Flexural strength of ice | σf | 0.55 | Mpa |
| Poisson’s ratio | γ | 0.33 | - |
| Frictional coefficient | μi | 0.15 | - |
| Gravitational acceleration | g | 9.81 | m/s2 |
| Ice density | ρi | 880 | kg/m3 |
| Seawater density | ρw | 1024 | kg/m3 |
| Parameters | Multipurpose Icebreaker | Araon | Unit |
|---|---|---|---|
| Lpp | 85 | 93.5 | m |
| B | 17 | 19.0 | m |
| D | 6 | 6.8 | m |
| Waterline entrance angle α | 22 | 54.3 | deg |
| Stem angle φ | 25 | 35.0 | deg |
| Model Test | Full-Scale Ship | Deviation (%) | ||||
|---|---|---|---|---|---|---|
| Model Ship Speed (m/s) | Total Resistance (N) | Open Water Resistance (N) | Ice Resistance (N) | Ice Resistance of Test (KN) | Numerical Ice Resistance (KN) | |
| 0.239 | 116.836 | 0.745 | 116.091 | 755.2 | 863.3 | 14.3 |
| 0.352 | 139.634 | 1.676 | 137.958 | 897.3 | 1055.0 | 17.6 |
| 0.477 | 171.139 | 2.980 | 168.159 | 1093.8 | 1195.7 | 9.4 |
| Parameters | Xue Long | Unit |
|---|---|---|
| Lpp | 147 | m |
| B | 22.9 | m |
| D | 13.5 | m |
| T | 8 | m |
| Waterline entrance angle α | 27 | deg |
| Stem angle φ | 24 | deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan, S.; Zhan, C.; Liu, Z.; Zhao, Q.; Guo, W. Numerical Research on Global Ice Loads of Maneuvering Captive Motion in Level Ice. J. Mar. Sci. Eng. 2021, 9, 1404. https://doi.org/10.3390/jmse9121404
Xuan S, Zhan C, Liu Z, Zhao Q, Guo W. Numerical Research on Global Ice Loads of Maneuvering Captive Motion in Level Ice. Journal of Marine Science and Engineering. 2021; 9(12):1404. https://doi.org/10.3390/jmse9121404
Chicago/Turabian StyleXuan, Shenyu, Chengsheng Zhan, Zuyuan Liu, Qiaosheng Zhao, and Wei Guo. 2021. "Numerical Research on Global Ice Loads of Maneuvering Captive Motion in Level Ice" Journal of Marine Science and Engineering 9, no. 12: 1404. https://doi.org/10.3390/jmse9121404
APA StyleXuan, S., Zhan, C., Liu, Z., Zhao, Q., & Guo, W. (2021). Numerical Research on Global Ice Loads of Maneuvering Captive Motion in Level Ice. Journal of Marine Science and Engineering, 9(12), 1404. https://doi.org/10.3390/jmse9121404