The Influence of Sizing of Wave Energy Converters on the Techno-Economic Performance



Abstract
1. Introduction
2. Methodology
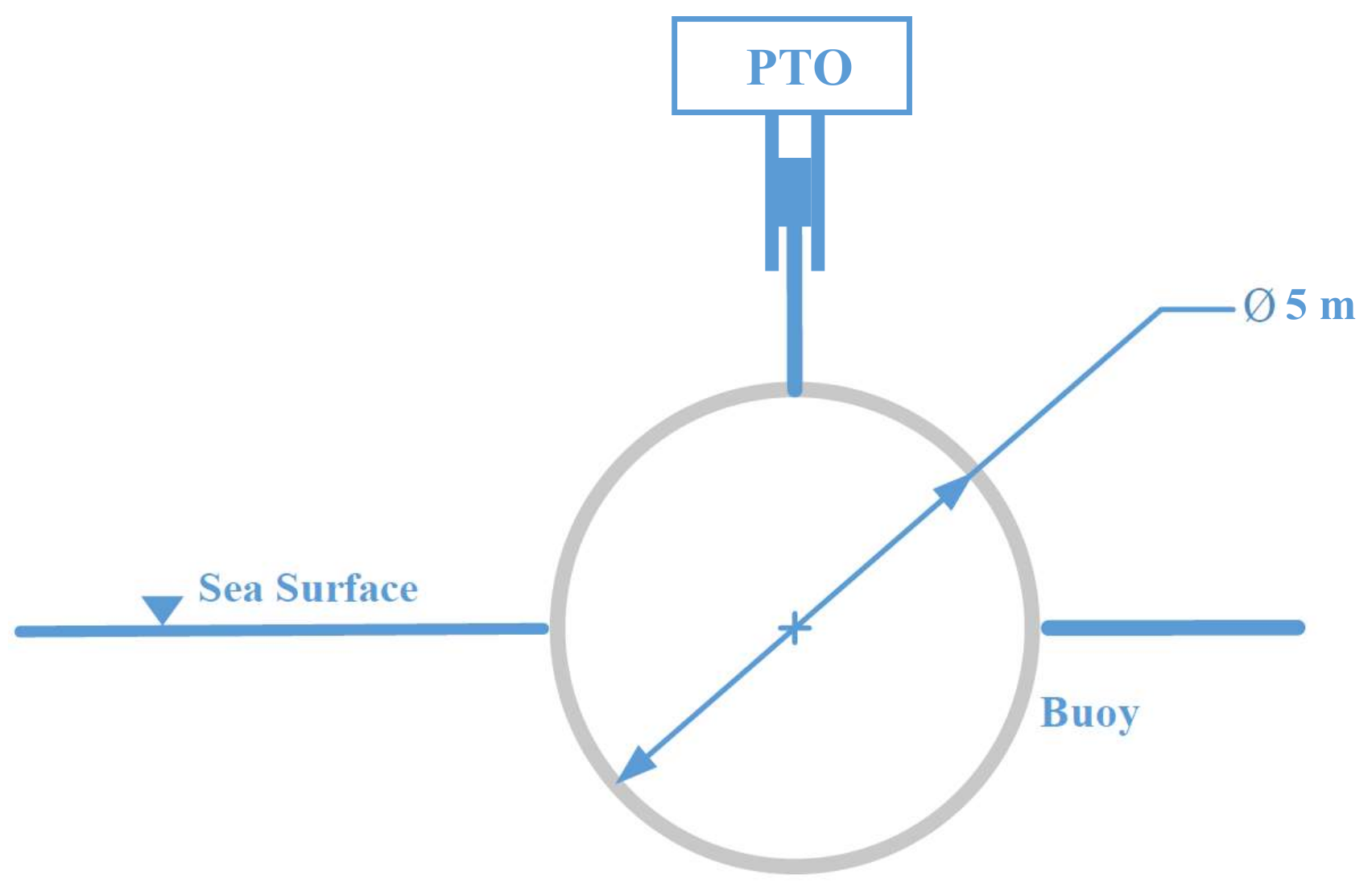
2.1. WEC Concept Description
2.2. Frequency Domain Modeling
2.3. Size Optimization Method
2.3.1. PTO Sizing
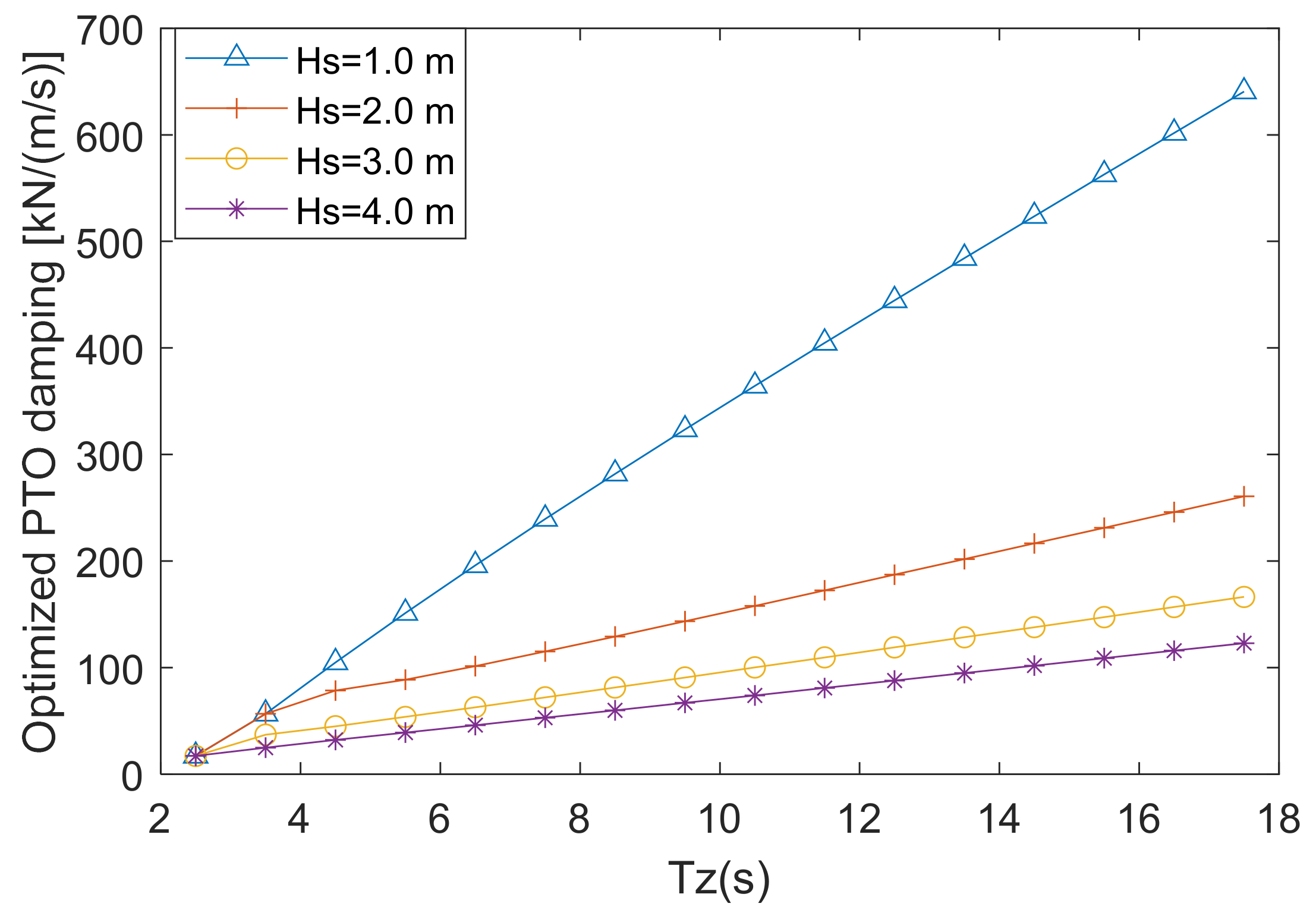
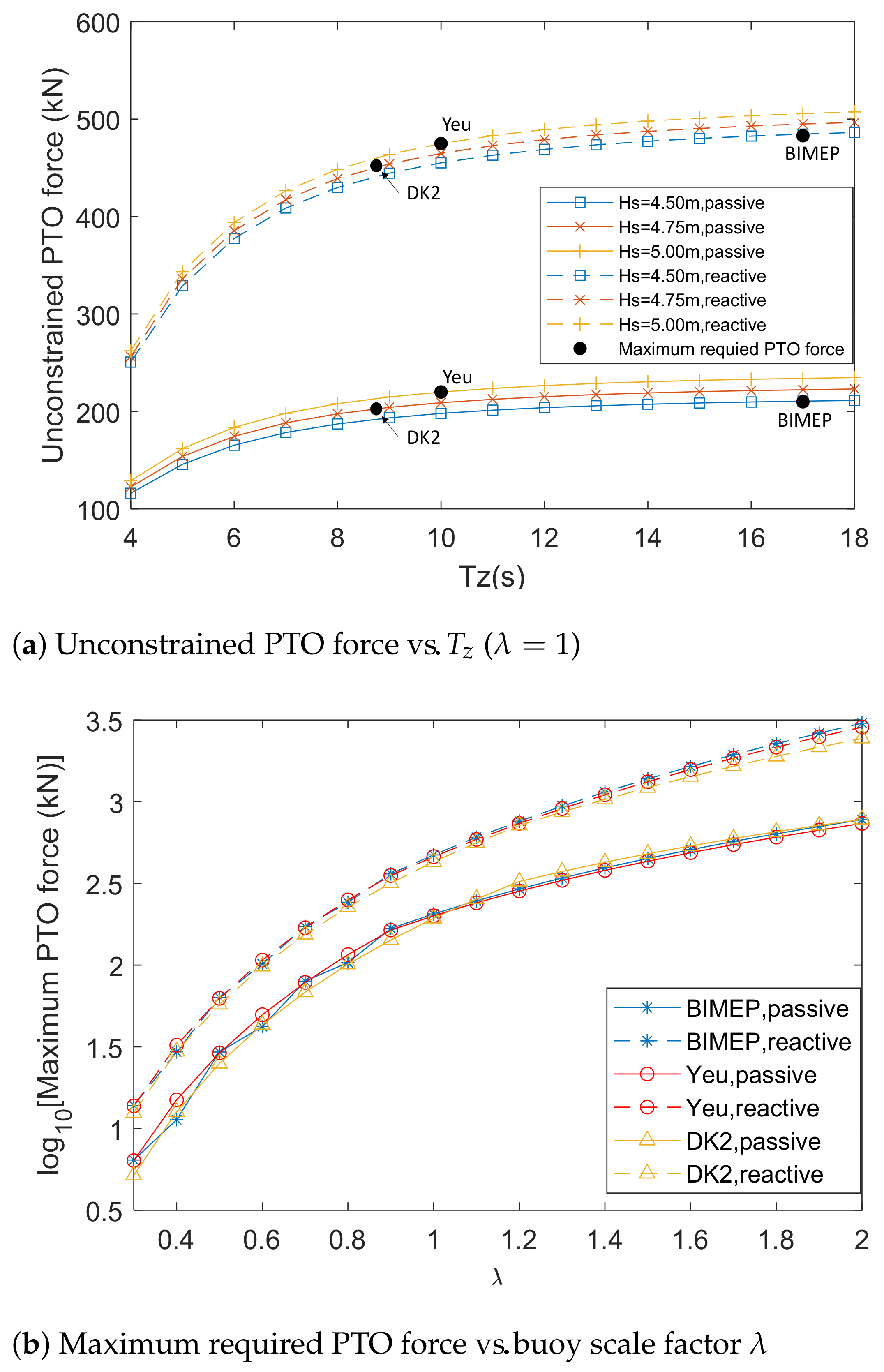
- The determination of PTO parameters in passive control:Here, the PTO force amplitude is constrained by means of adjusting the PTO parameters. Besides, the PTO parameters are also expected to be determined to limit the stroke and maximize the absorbed power.First, let us discuss the PTO force constraints. In the passive control strategy, only PTO damping can be varied and the PTO reactance equals zero. Therefore, the PTO force amplitude expressed in (12) can be simplified asTo reveal the relationship between and , the derivation of (13) with respect to is calculated and givesIt can be deduced that (14) is always positive as and are greater than 0, which also implies that is a monotonic function of . In other words, limiting the PTO damping can directly constrain the PTO force amplitude. During size optimization, the PTO sizing ratio and buoy scale factor are used as optimization variables. However, to determine PTO parameters with the force limit, the PTO force limit should be derived to be explicit. According to the definition of the PTO sizing ratio, the PTO force limit can be calculated by multiplying the given PTO sizing ratio with the maximum required PTO force for the particular buoy scale factor and considered sea site. Therefore, the PTO force limit is directly related to each set of optimization variables. Here, the PTO force limit is represented by , and the maximum allowed PTO damping can be obtained by solving (15), in which only the positive solution should be retained.Therefore, for constraining the PTO force amplitude, should satisfySecondly, except PTO force constraints, the displacement limit should be considered during the selection of PTO parameters. It can be deduced from (8) that the decreases with increasing. If the stroke constraint of the buoy, , comes to play, the PTO resistance should be increased to limit the velocity amplitude, which is shown asIn this way, for constraining the stroke amplitude, should satisfywhere is the velocity limit, which is equal to . Therefore, it can be seen from (16) and (18) that the upper bound and the lower bound of the available PTO damping are decided by the PTO force limit and the stoke limit, respectively, which could also be expressed asThus, the PTO damping should be selected from the range expressed in (19) to satisfy the constraints.According to Reference [28], the optimal PTO damping for maximizing the absorbed power without any constraint is expressed asTo maximize the absorbed power of WECs, should be as close to as possible. So, the principle of PTO damping selection in PTO sizing can be presented as:
- ⎯
- If ≤ ≤ , the optimal should be selected as .
- ⎯
- If < or > , the optimal should be selected as the one of and which is closer to .
- ⎯
- In case , there is no feasible PTO damping coefficient satisfying both of the constraints. This case would happen when the PTO force limit is very low or the wave power is very high, which realistically means the device has to be stopped from operation for protecting itself from frequently violating the physical constraints.
- The determination of PTO parameters in reactive control:Unlike PTO sizing in passive control, both and can be varied to meet the requirement of motion and PTO force constraints. Given the complexity of the multivariable optimization with nonlinear constraints, a numerical optimization tool is used to select the optimal combination of and , and it can be expressed in the form asThe optimization is performed based on the “interior point” algorithm in MATLAB environment, and the tolerance of the function is set as 1e-4. To avoid the local optimal solution, the ‘MultiStart’ solver is adopted. In this solver, iterations start with multiple random points, in which the global optimal solution is expected to be found [30]. In this work, the number of multiple starting points is set as 20, and the bounds of the PTO damping and PTO reactance are set as [0,10 ] and [−10, 10] for each sea state. In case that no feasible solution is found in the optimization, the PTO absorbed power would be treated as 0.
2.3.2. Buoy Sizing
2.3.3. Economic Modeling for Cost Estimation
3. Results and Discussion
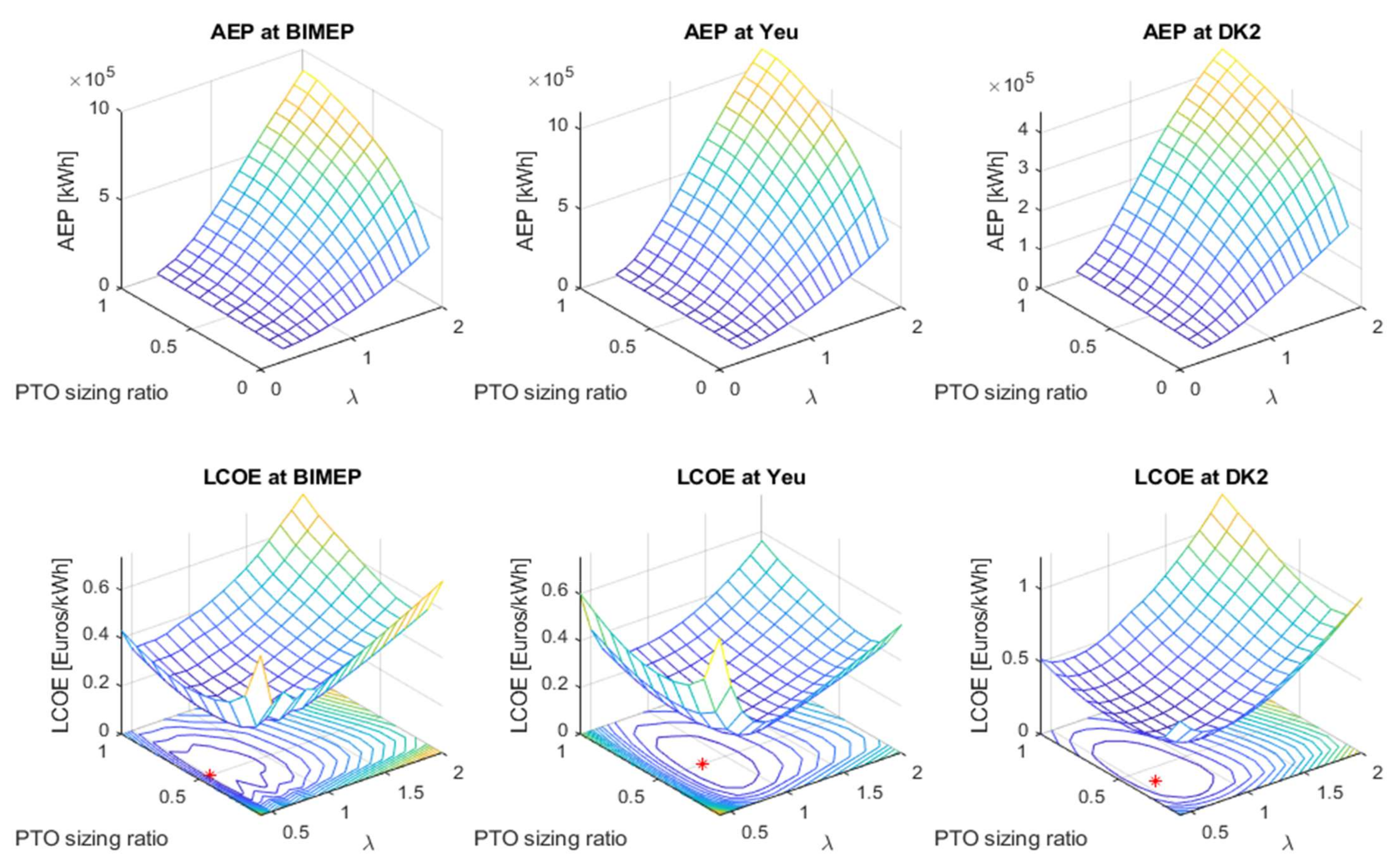
3.1. The Effects of Sizing on the Performance of the Wec
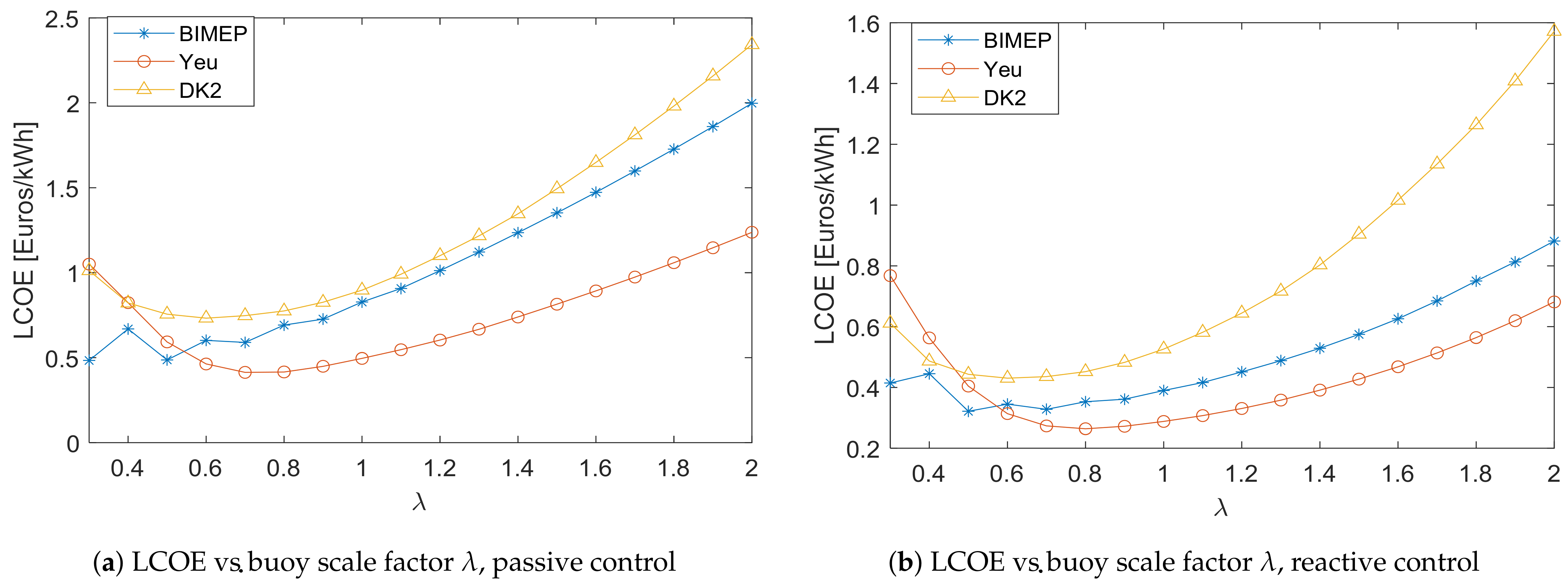
3.2. Size Optimization for Typical Realistic Sea Sites
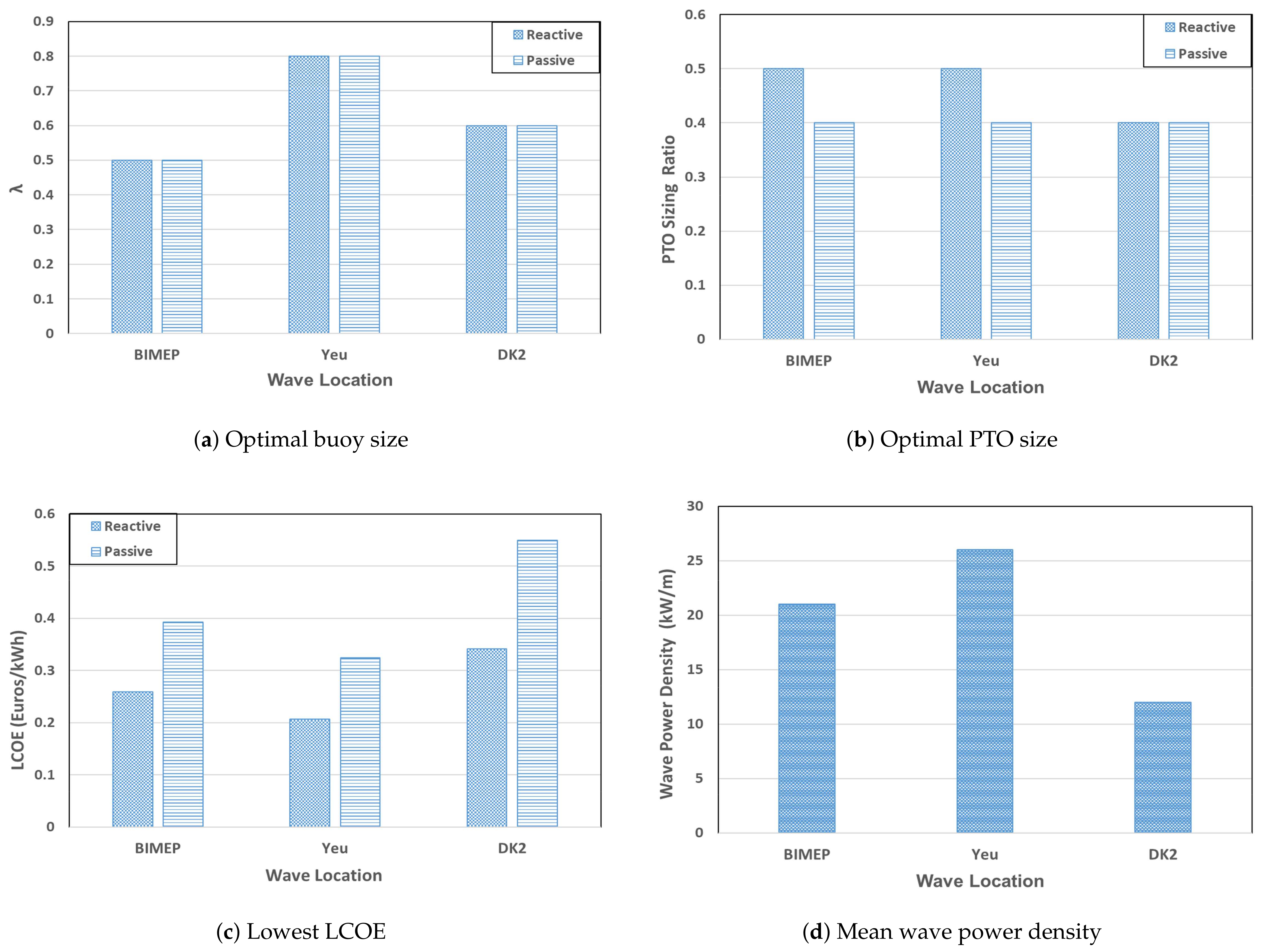
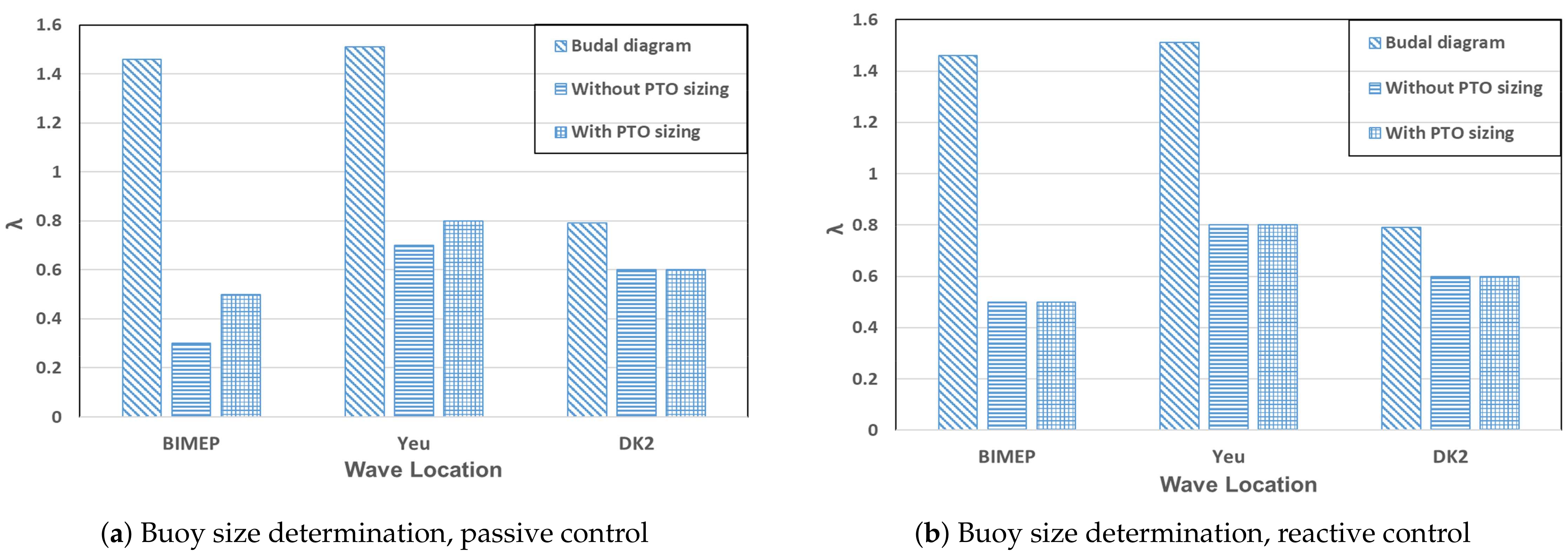
3.2.1. Results of Size Optimization
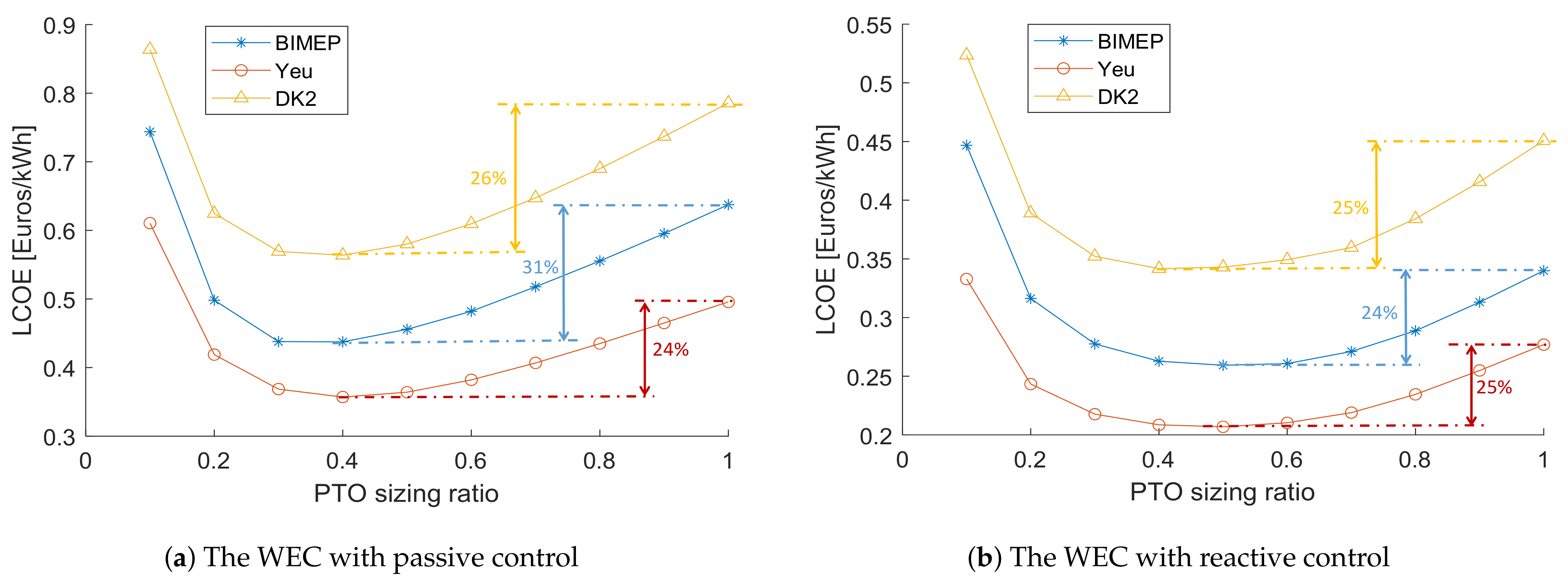
3.2.2. The Benefits of PTO Downsizing for the Techno-Economic Performance
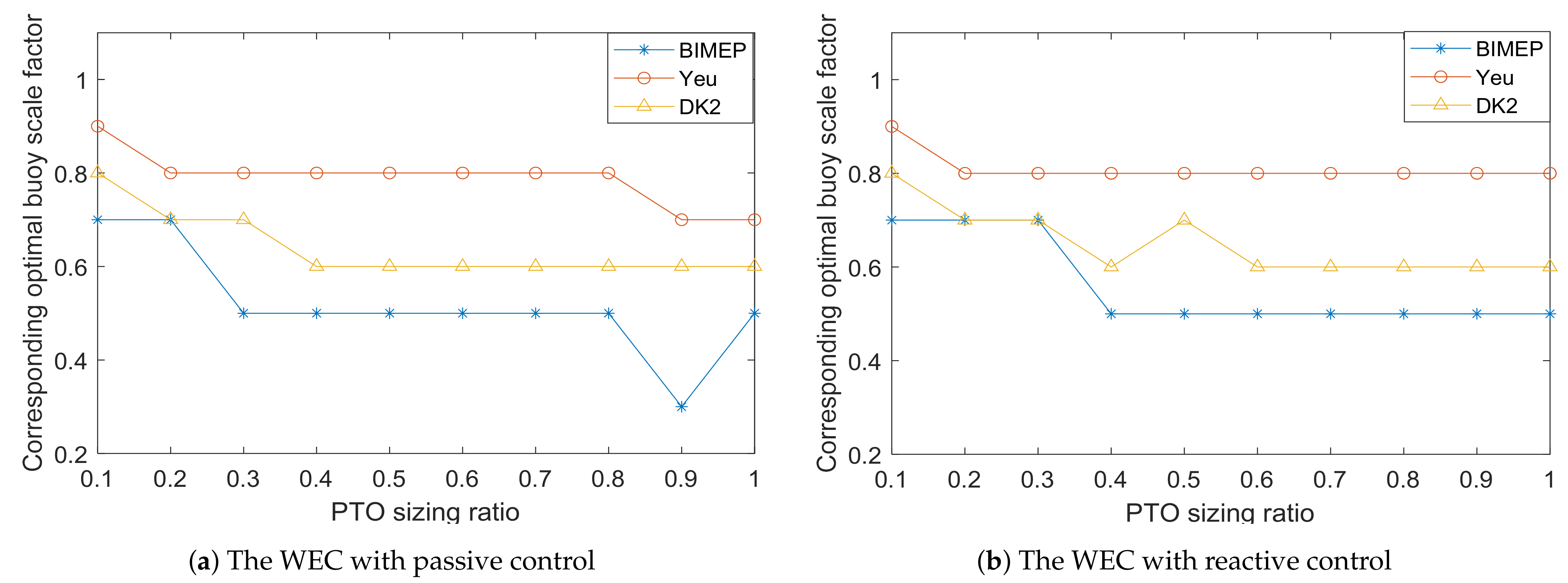
3.2.3. The Interaction between PTO Sizing and Buoy Sizing
3.3. The Proposed Method Versus Other Size Optimization Methods
3.3.1. Budal Diagram
- calculate the wave power threshold which is being exceeded one third of the annual time in the concerned wave climate;
- since and are already known from step 1 and 2, in harmonic waves, the wave height can be calculated;
- the suitable volume V can be calculated by solving ; and
- finally, as the buoy volume is determined, the optimal PTO force limit is selected as the value which is required to maximize the absorbed power of the WEC at the designed wave condition ( and ).
3.3.2. The Size Optimization without PTO Downsizing
3.3.3. Comparison of Size Optimization Methods
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aderinto, T.; Li, H. Ocean Wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Lehmann, M.; Karimpour, F.; Goudey, C.A.; Jacobson, P.T.; Alam, M.R. Ocean wave energy in the United States: Current status and future perspectives. Renew. Sustain. Energy Rev. 2017, 74, 1300–1313. [Google Scholar] [CrossRef]
- De Andrés, A.; Macgillivray, A.; Guanche, R.; Jeffrey, H. Factors affecting LCOE of Ocean energy technologies: A study of technology and deployment attractiveness. In Proceedings of the 5th International Conference on Ocean Energy, Halifax, NS, Canada, 4–6 November 2014; pp. 1–11. [Google Scholar]
- Pecher, A. Handbook of Ocean Wave Energy; Springer: Berlin/Heidelberg, Germany, 2017; Volume 7. [Google Scholar] [CrossRef]
- Babarit, A.; Hals, J.; Muliawan, M.J.; Kurniawan, A.; Moan, T.; Krokstad, J. Numerical benchmarking study of a selection of wave energy converters. Renew. Energy 2012, 41, 44–63. [Google Scholar] [CrossRef]
- Chang, G.; Jones, C.A.; Roberts, J.D.; Neary, V.S. A comprehensive evaluation of factors affecting the levelized cost of wave energy conversion projects. Renew. Energy 2018, 127, 344–354. [Google Scholar] [CrossRef]
- Babarit, A. A database of capture width ratio of wave energy converters. Renew. Energy 2015, 80, 610–628. [Google Scholar] [CrossRef]
- De Andres, A.; Maillet, J.; Todalshaug, J.H.; Möller, P.; Bould, D.; Jeffrey, H. Techno-economic related metrics for a wave energy converters feasibility assessment. Sustainability 2016, 8, 1109. [Google Scholar] [CrossRef]
- Sergiienko, N.Y.; Cazzolato, B.S.; Ding, B.; Hardy, P.; Arjomandi, M. Performance comparison of the floating and fully submerged quasi-point absorber wave energy converters. Renew. Energy 2017, 108, 425–437. [Google Scholar] [CrossRef]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2003; Volume 30, p. 953. [Google Scholar] [CrossRef]
- Falnes, J.; Hals, J. Heaving buoys, point absorbers and arrays. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2012, 370, 246–277. [Google Scholar] [CrossRef]
- Pecher, A. Performance Evaluation of Wave Energy Converters; River Publishers: Hakodate, Denmark, 2014; pp. 1–107. [Google Scholar] [CrossRef]
- O’Connor, M.; Lewis, T.; Dalton, G. Techno-economic performance of the Pelamis P1 and Wavestar at different ratings and various locations in Europe. Renew. Energy 2013, 50, 889–900. [Google Scholar] [CrossRef]
- Tai, V.C.; See, P.C.; Merle, S.; Molinas, M. Sizing and control of the electric power take off for a buoy type point absorber wave energy converter. Renew. Energy Power Qual. J. 2012, 1, 1614–1619. [Google Scholar] [CrossRef]
- Tokat, P. Performance Evaluation and Life Cycle Cost Analysis of the Electrical Generation Unit of a Wave Energy Converter; Chalmers Tekniska Hogskola: Gothenburg, Sweden, 2018. [Google Scholar]
- Shek, J.; Macpherson, D.; Mueller, M. Phase and amplitude control of a linear generator for wave energy conversion. In Proceedings of the 4th IET International Conference on Power Electronics, Machines and Drives (PEMD 2008), York, UK, 2–4 April 2008; pp. 66–70. [Google Scholar] [CrossRef]
- Shek, J.; Macpherson, D.; Mueller, M. Experimental verification of linear generator control for direct drive wave energy conversion. IET Renew. Power Gener. 2010, 4, 395–403. [Google Scholar] [CrossRef]
- Tedeschi, E.; Carraro, M.; Molinas, M.; Mattavelli, P. Effect of control strategies and power take-off efficiency on the power capture from sea waves. IEEE Trans. Energy Convers. 2011, 26, 1088–1098. [Google Scholar] [CrossRef]
- Garcia-Rosa, P.; Bacelli, G.; Ringwood, J. Control-informed geometric optimization of wave energy converters: The impact of device motion and force constraints. Energies 2015, 8, 13672–13687. [Google Scholar] [CrossRef]
- Astariz, S.; Iglesias, G. The economics of wave energy: A review. Renew. Sustain. Energy Rev. 2015, 45, 397–408. [Google Scholar] [CrossRef]
- Hals, J.; Bjarte-Larsson, T.; Falnes, J. Optimum Reactive Control and Control by Latching of a Wave-Absorbing Semisubmerged Heaving Sphere. In Proceedings of the 21st International Conference on Offshore Mechanics and Arctic Engineering, Oslo, Norway, 23–28 June 2002; pp. 415–423. [Google Scholar] [CrossRef]
- Tedeschi, E.; Molinas, M. Tunable control strategy for wave energy converters with limited power takeoff rating. IEEE Trans. Ind. Electron. 2012, 59, 3838–3846. [Google Scholar] [CrossRef]
- Kramer, M.M.; Marquis, L.; Frigaard, P. Performance Evaluation of the Wavestar Prototype. In Proceedings of the 9th European Wave and Tidal Conference, Southampton, UK, 5–9 September 2011; pp. 5–9. [Google Scholar]
- Penalba, M.; Kelly, T.; Ringwood, J. Using NEMOH for Modelling Wave Energy Converters: A Comparative Study with WAMIT. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 Auguest–1 September 2017; p. 10. [Google Scholar]
- Pastor, J.; Liu, Y. Frequency and time domain modeling and power output for a heaving point absorber wave energy converter. Int. J. Energy Environ. Eng. 2014, 5, 1–13. [Google Scholar] [CrossRef]
- Journée, J.M.J.; Massie, W.W.; Huijsmans, R.H.M. Offshore Hydrodynamics; Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar]
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef]
- Hals, J.; Falnes, J.; Moan, T. Constrained Optimal Control of a Heaving Buoy Wave-Energy Converter. J. Offshore Mech. Arct. Eng. 2010, 133, 011401. [Google Scholar] [CrossRef]
- Prado, M.; Polinder, H. Direct Drive Wave Energy Conversion Systems: An Introduction; Woodhead Publishing Limited: Sawston, Cambridge, 2013; pp. 175–194. [Google Scholar] [CrossRef]
- Ugray, Z.; Lasdon, L.; Plummer, J.; Glover, F.; Kelly, J.; Martí, R. Scatter Search and Local NLP Solvers: A Multistart Framework for Global Optimization. Informs J. Comput. 2007. [Google Scholar] [CrossRef]
- Cahill, B.; Lewis, A.W. Wave period ratios and the calculation of wave power. In Proceedings of the 2nd Marine Energy Technology Symposium, Seattle, WA, USA, 15–18 April 2014; pp. 1–10. [Google Scholar]
- Chozas, J.; Kofoed, J.; Helstrup, N. The COE Calculation Tool for Wave Energy Converters; Version 1.6; DCE Technical Reports; No. 161; Aalborg University: Aalborg, Denmark, 2014. [Google Scholar]
- Payne, G. Guidance for the experimental tank testing of wave energy converters. SuperGen Mar. 2008, 254. [Google Scholar]
- De Andres, A.; Medina-Lopez, E.; Crooks, D.; Roberts, O.; Jeffrey, H. On the reversed LCOE calculation: Design constraints for wave energy commercialization. Int. J. Mar. Energy 2017, 18, 88–108. [Google Scholar] [CrossRef]
- Bank of England. Inflation Calculator-Bank of England [EB/OL]. Available online: https://www.bankofengland.co.uk/monetary-policy/inflation/inflation-calculator (accessed on 4 October 2020).
- Polinder, H. Principles of Electrical Design of Permanent Magnet Generators for Direct Drive Renewable Energy Systems; Woodhead Publishing Limited: Cambridge, UK, 2013; pp. 30–50. [Google Scholar] [CrossRef]
- Tokat, P.; Thiringer, T. Sizing of IPM Generator for a Single Point Absorber Type Wave Energy Converter. IEEE Trans. Energy Convers. 2018, 33, 10–19. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hours | (s) | 2.14 | 2.86 | 3.57 | 4.29 | 5.00 | 5.71 | 6.43 | 7.14 | 7.89 | 8.57 | 9.29 | 10.00 | 10.71 | 11.43 | 12.14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (m) | ||||||||||||||||
| 0.50 | 1.27 | 55.70 | 79.75 | 67.09 | 64.56 | 62.03 | 37.98 | 12.66 | 1.27 | |||||||
| 1.00 | 56.97 | 219.00 | 268.37 | 337.99 | 369.64 | 244.32 | 135.45 | 62.03 | 3.80 | 1.27 | 1.27 | |||||
| 1.50 | 1.27 | 36.71 | 163.30 | 278.50 | 281.03 | 215.20 | 145.58 | 124.06 | 86.08 | 17.72 | 3.80 | 2.53 | ||||
| 2.00 | 69.62 | 225.33 | 235.46 | 175.98 | 146.84 | 64.56 | 62.03 | 22.79 | 11.39 | 6.33 | ||||||
| 2.50 | 81.02 | 345.59 | 324.07 | 272.17 | 106.34 | 72.16 | 43.04 | 11.39 | 2.53 | |||||||
| 3.00 | 15.19 | 281.03 | 340.53 | 250.66 | 112.66 | 87.35 | 58.23 | 31.66 | 10.13 | |||||||
| 3.50 | 69.62 | 293.69 | 192.42 | 118.99 | 65.83 | 51.90 | 36.71 | 22.79 | 7.60 | 1.27 | ||||||
| 4.00 | 3.80 | 110.13 | 127.86 | 65.83 | 49.37 | 27.85 | 27.85 | 22.79 | 15.19 | 3.80 | ||||||
| 4.50 | 26.58 | 43.04 | 60.76 | 21.52 | 12.66 | 6.33 | 5.06 | 1.27 | ||||||||
| 5.00 | 2.53 | 20.25 | 34.18 | 15.19 | 7.60 | 1.27 | ||||||||||
| 5.50 | 7.60 | 24.05 | 12.66 | 6.33 | ||||||||||||
| 6.00 | 3.80 | 13.92 | 8.86 | 1.27 | ||||||||||||
| 6.50 | 2.53 | 7.60 | 1.27 |
| Hours | (s) | 5.00 | 7.00 | 9.00 | 11.00 | 13.00 | 15.00 | 17.00 |
|---|---|---|---|---|---|---|---|---|
| (m) | ||||||||
| 0.75 | 148.92 | 219.00 | 78.84 | 17.52 | ||||
| 1.50 | 858.48 | 2664.52 | 1445.40 | 508.08 | 78.84 | 8.76 | ||
| 2.50 | 744.60 | 560.64 | 324.12 | 157.68 | 35.04 | |||
| 3.50 | 87.60 | 262.80 | 61.32 | 52.56 | 35.04 | 8.76 | ||
| 4.50 | 105.12 | 35.04 | 8.76 | 8.76 | 8.76 | |||
| 5.50 | 8.76 | 26.28 |
| Hours | (s) | 2.50 | 3.50 | 4.50 | 5.50 | 6.50 | 7.50 | 8.50 | 9.50 |
|---|---|---|---|---|---|---|---|---|---|
| (m) | |||||||||
| 0.25 | 584.00 | 634.00 | 113.00 | 29.00 | 7.00 | 1.00 | |||
| 0.75 | 20.00 | 1552.00 | 610.00 | 153.00 | 56.00 | 16.00 | 6.00 | 2.00 | |
| 1.25 | 188.00 | 1397.00 | 123.00 | 25.00 | 9.00 | 7.00 | 3.00 | ||
| 1.75 | 1.00 | 621.00 | 501.00 | 8.00 | 2.00 | 1.00 | 1.00 | ||
| 2.25 | 14.00 | 709.00 | 18.00 | 1.00 | |||||
| 2.75 | 286.00 | 224.00 | 1.00 | ||||||
| 3.25 | 10.00 | 314.00 | 2.00 | ||||||
| 3.75 | 190.00 | 34.00 | |||||||
| 4.25 | 17.00 | 121.00 | |||||||
| 4.75 | 77.00 | 1.00 | |||||||
| 5.25 | 26.00 | 11.00 | |||||||
| 5.75 | 2.00 | 16.00 | |||||||
| 6.25 | 10.00 | ||||||||
| 6.75 | 4.00 | 1.00 | |||||||
| 7.25 | 1.00 |
| CAPEX | Categories | Average Percentage |
|---|---|---|
| Mass-related capital cost | Structure | = 38.2% |
| Foundation and mooring | = 19.1% | |
| Installation | = 10.2% | |
| Power-related capital cost | PTO component | = 24.2% |
| Connection | = 8.3% |
| Sea Site | Wave Power Density Threshold | Buoy Volume | PTO Force Limit | |||
|---|---|---|---|---|---|---|
| Reactive | Passive | |||||
| Yeu Island | 30.4 kW/m | 7.8 s | 2.00 m | 224 m | 985 kN | 216 kN |
| BIMEP | 14.6 kW/m | 8.4 s | 1.33 m | 206 m | 946 kN | 145 kN |
| DK2 | 8.2 kW/m | 5.4 s | 1.24 m | 33 m | 142 kN | 36 kN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, J.; Polinder, H.; Laguna, A.J.; Wellens, P.; Miedema, S.A. The Influence of Sizing of Wave Energy Converters on the Techno-Economic Performance. J. Mar. Sci. Eng. 2021, 9, 52. https://doi.org/10.3390/jmse9010052
Tan J, Polinder H, Laguna AJ, Wellens P, Miedema SA. The Influence of Sizing of Wave Energy Converters on the Techno-Economic Performance. Journal of Marine Science and Engineering. 2021; 9(1):52. https://doi.org/10.3390/jmse9010052
Chicago/Turabian StyleTan, Jian, Henk Polinder, Antonio Jarquin Laguna, Peter Wellens, and Sape A. Miedema. 2021. "The Influence of Sizing of Wave Energy Converters on the Techno-Economic Performance" Journal of Marine Science and Engineering 9, no. 1: 52. https://doi.org/10.3390/jmse9010052
APA StyleTan, J., Polinder, H., Laguna, A. J., Wellens, P., & Miedema, S. A. (2021). The Influence of Sizing of Wave Energy Converters on the Techno-Economic Performance. Journal of Marine Science and Engineering, 9(1), 52. https://doi.org/10.3390/jmse9010052