Pressure Sensing Technique for Observing Seabed Deformation Caused by Submarine Sand Wave Migration




Abstract
1. Introduction
2. Materials and Methods
2.1. Theory
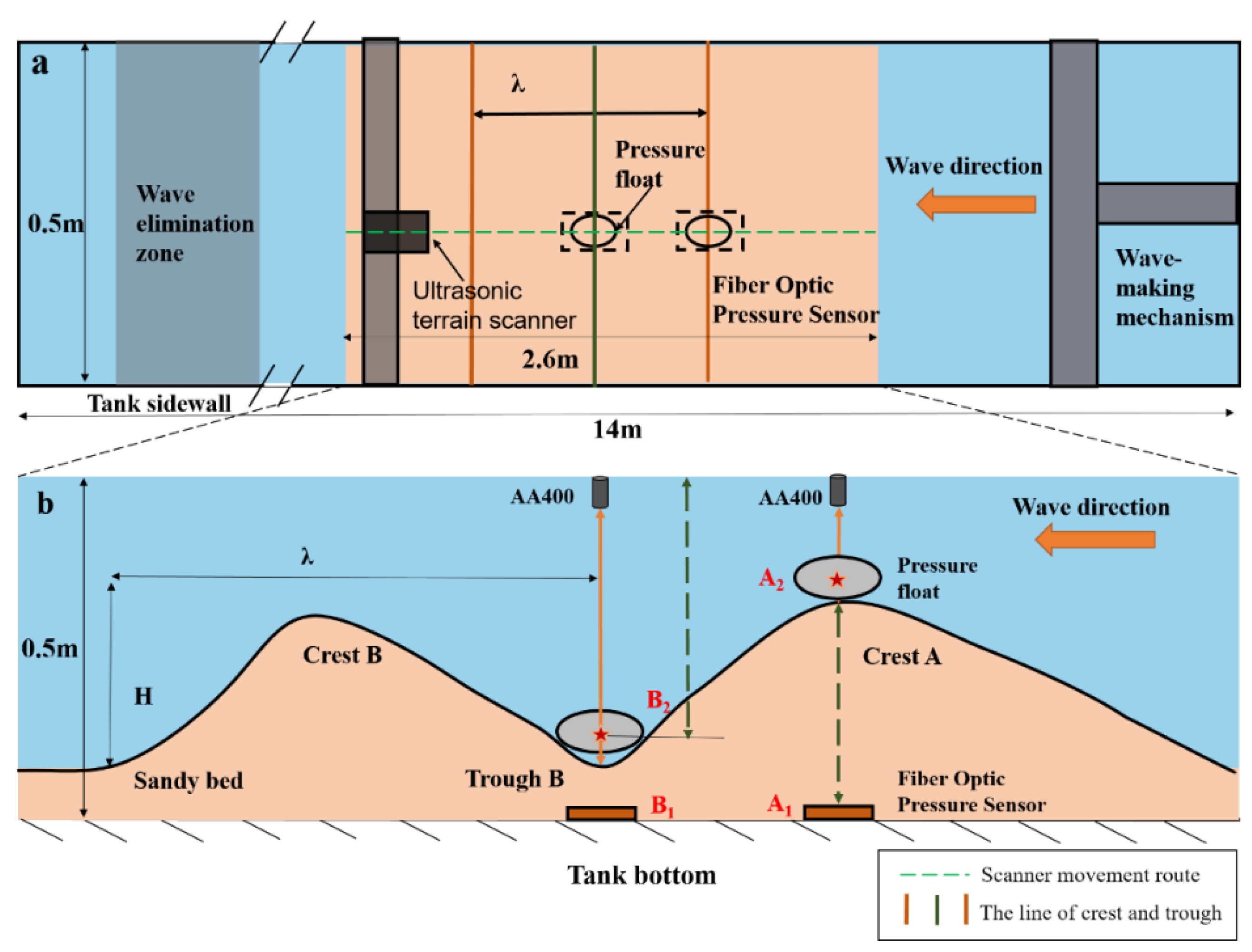
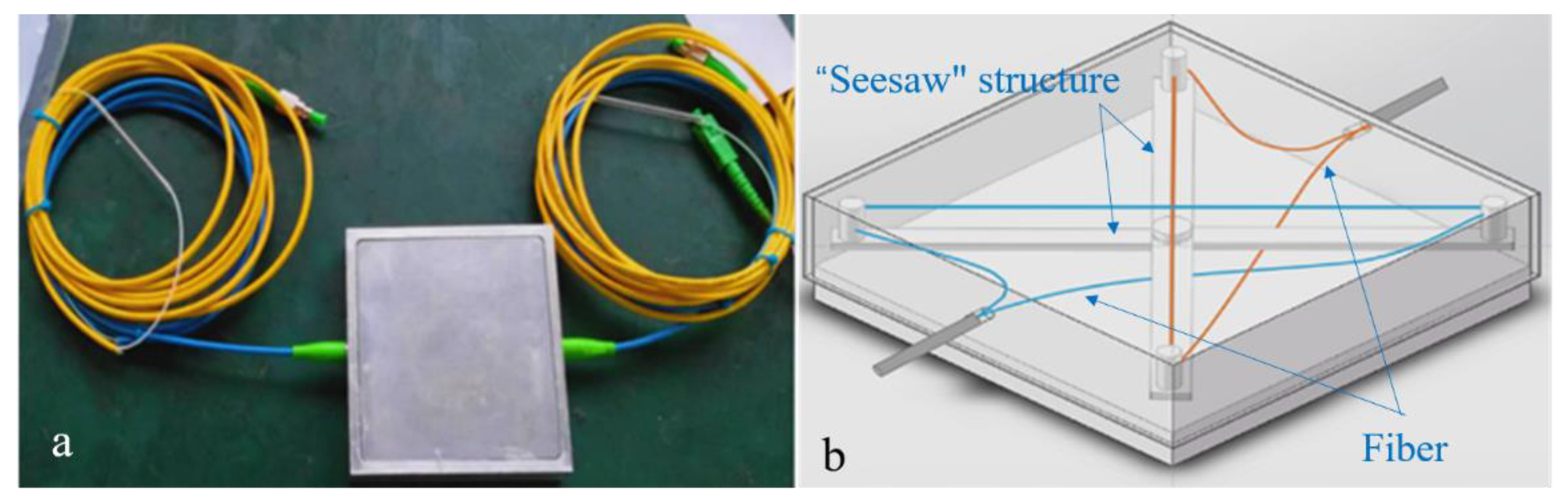
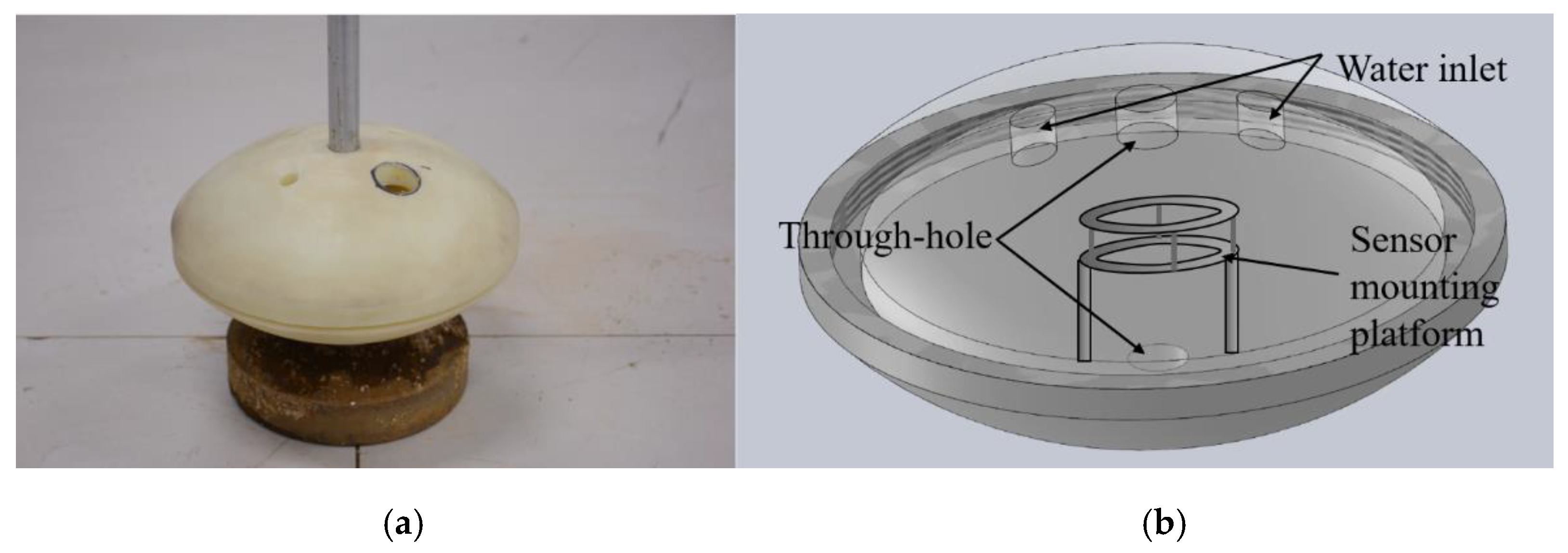
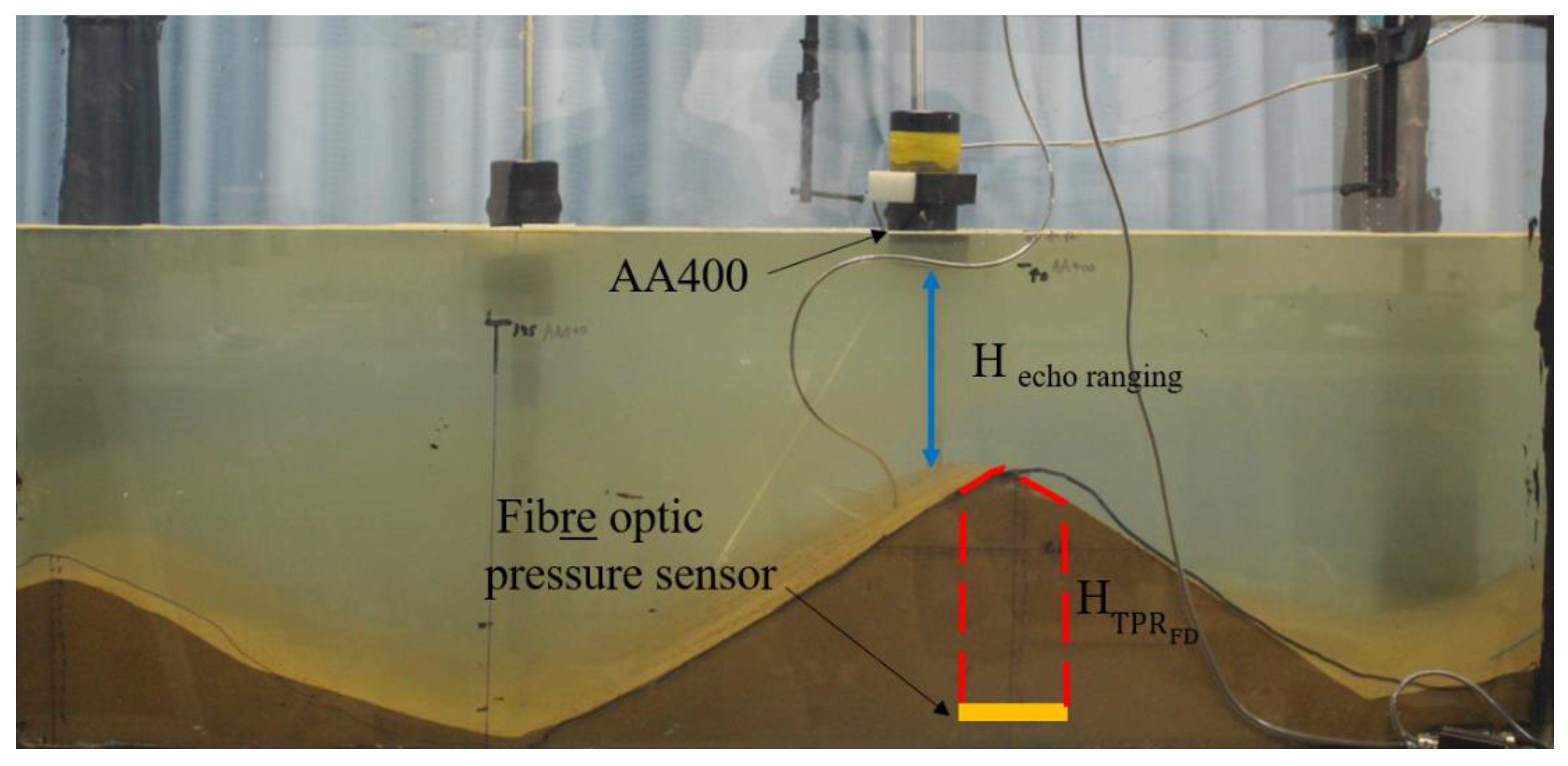
2.2. Experimental Set-Up and Arrangement
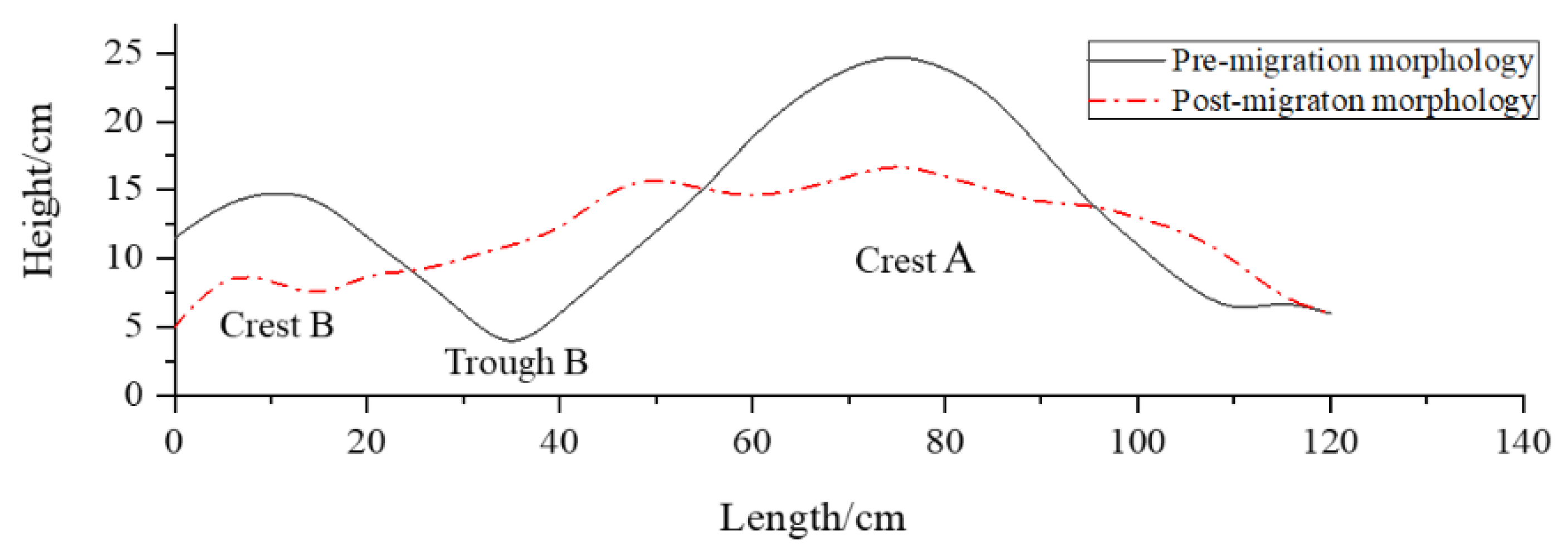
3. Results
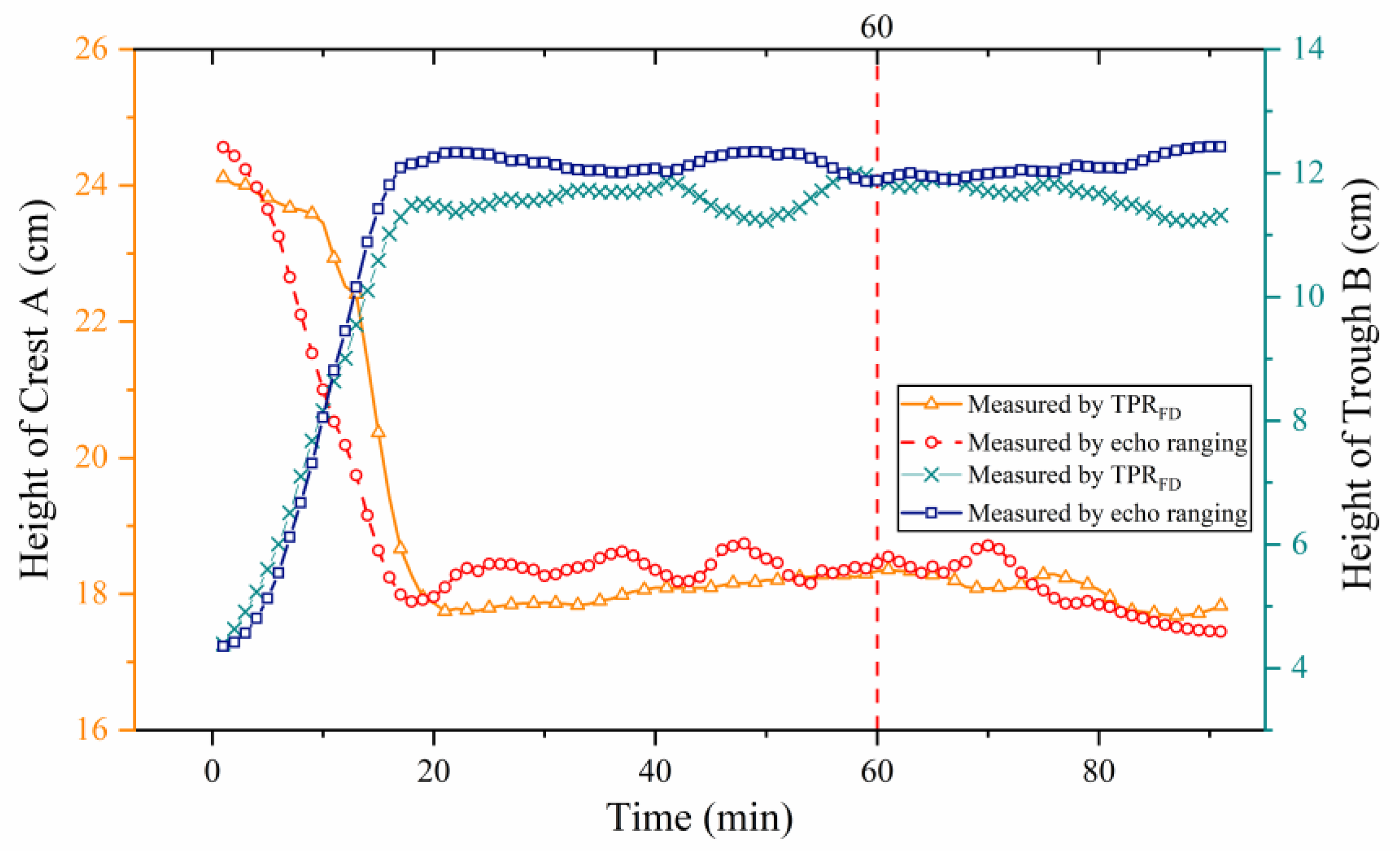
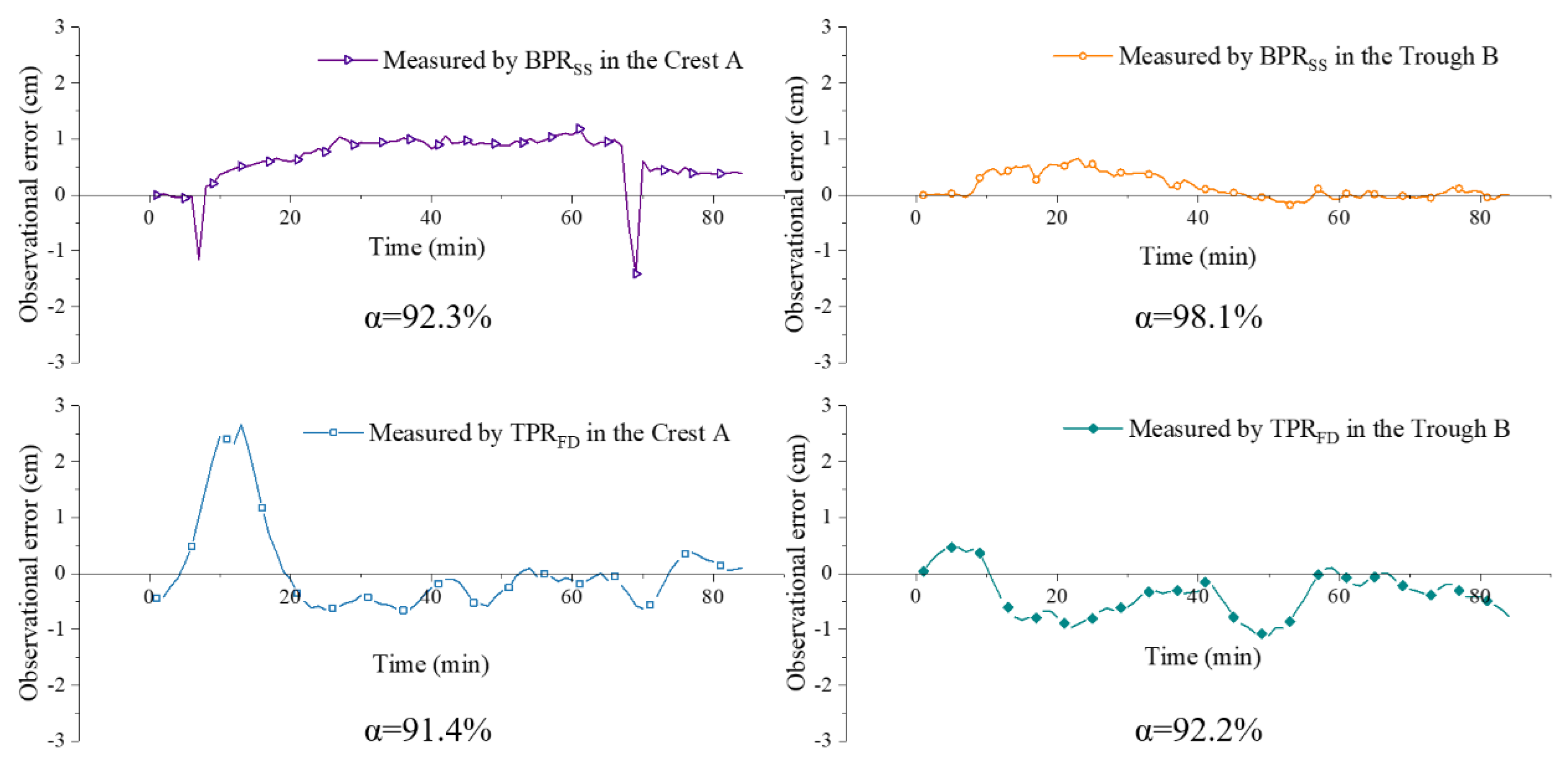
3.1. Measurements Made by the Fixed-depth Total Pressure Recorder (TPRFD)
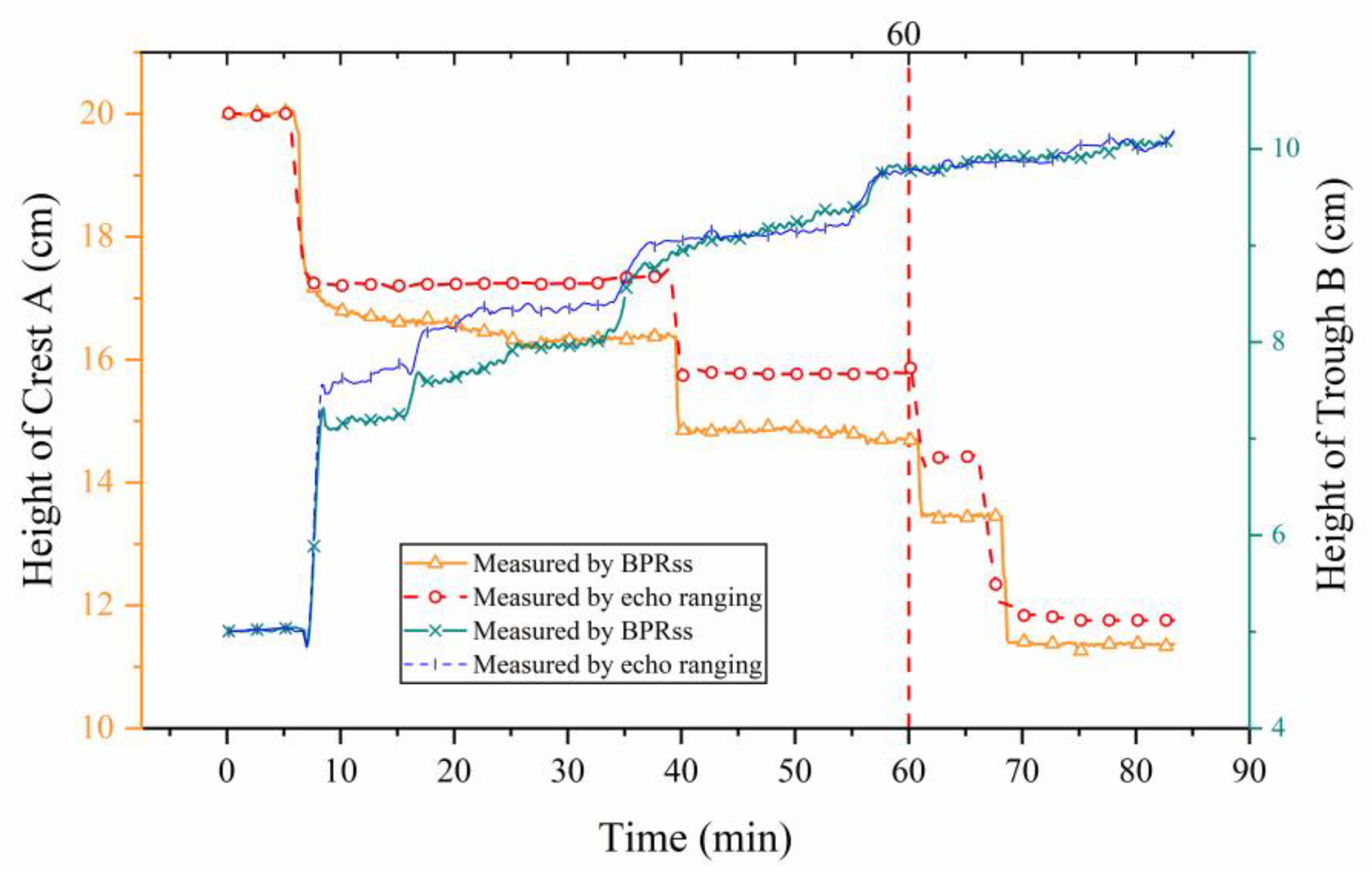
3.2. Measurements Made by the Surface Synchronous Bottom Pressure Recorder (BPRSS)
4. Discussion
4.1. The comparison of the Results Measured by Pressure Sensor Techniques and Echo Ranging
4.2. The Accuracy of Pressure Sensor Techniques in Reflecting Elevation
4.3. Applicability of In Situ Observations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Allen, J.R.L. Sand waves: A model of origin and internal structure. Elsevier 1980, 26. [Google Scholar] [CrossRef]
- Flemming, B.W. Underwater sand dunes along the southeast African continental margin â Observations and implications. Elsevier 1978, 26, 177–198. [Google Scholar] [CrossRef]
- Morelissen, R.; Hulscher, S.J.M.H.; Knaapen, M.A.F.; Nemeth, A.A.; Bijker, R. Mathematical modelling of sand wave migration and the interaction with pipelines. Coast. Eng. 2003, 48, 197–209. [Google Scholar] [CrossRef]
- Karl, H.A.; Cacchione, D.A.; Carlson, P.R. Internal-Wave Currents as a Mechanism to Account for Large Sand Waves in Navarinsky Canyon Head, Bering Sea. SEPM J. Sediment. Res. 1986, 56, 706–714. [Google Scholar] [CrossRef]
- Reeder, D.B.; Ma, B.B.; Yang, Y.J. Very large subaqueous sand dunes on the upper continental slope in the South China Sea generated by episodic, shoaling deep-water internal solitary waves. Mar. Geol. 2011, 279, 12–18. [Google Scholar] [CrossRef]
- King, E.L.; Boe, R.; Bellec, V.K.; Rise, L.; Skardhamar, J.; Ferre, B.; Dolan, M.F.J. Contour current driven continental slope-situated sandwaves with effects from secondary current processes on the Barents Sea margin offshore Norway. Mar. Geol. 2014, 353, 108–127. [Google Scholar] [CrossRef]
- Franzetti, M.; Le Roy, P.; Delacourt, C.; Garlan, T.; Cancouet, R.; Sukhovich, A.; Deschamps, A. Giant dune morphologies and dynamics in a deep continental shelf environment: Example of the banc du four (Western Brittany, France). Mar. Geol. 2013, 346, 17–30. [Google Scholar] [CrossRef]
- Games, K.P.; Gordon, D.I. Study of sand wave migration over five years as observed in two windfarm development areas, and the implications for building on moving substrates in the North Sea. Earth Environ. Sci. Trans. R. Soc. Edinb. 2015, 105, 241–249. [Google Scholar] [CrossRef]
- Idier, D.; Astruc, D.; Garlan, T. Spatio-temporal variability of currents over a mobile dune field in the Dover Strait. Cont. Shelf Res. 2011, 31, 1955–1966. [Google Scholar] [CrossRef]
- Droghei, R.; Falcini, F.; Casalbore, D.; Martorelli, E.; Mosetti, R.; Sannino, G.; Santoleri, R.; Chiocci, F.L. The role of Internal Solitary Waves on deep-water sedimentary processes: The case of up-slope migrating sediment waves off the Messina Strait. Sci. Rep. 2016, 6, 36376. [Google Scholar] [CrossRef]
- Li, Y.; Lin, M.A.; Jiang, W.B.; Fan, F.X. Process Control of the Sand Wave Migration in Beibu Gulf of the South China Sea. J. Hydrodyn. 2011, 23, 439–446. [Google Scholar] [CrossRef]
- Buijsman, M.C.; Ridderinkhof, H. Long-term evolution of sand waves in the Marsdiep inlet. I: High-resolution observations. Cont. Shelf Res. 2008, 28, 1190–1201. [Google Scholar] [CrossRef]
- van Dijk, T.A.G.P.; Kleinhans, M.G. Processes controlling the dynamics of compound sand waves in the North Sea, Netherlands. J. Geophys. Res. Earth Surf. 2005, 110. [Google Scholar] [CrossRef]
- Besio, G.; Blondeaux, P.; Brocchini, M.; Hulscher, S.J.M.H.; Idier, D.; Knaapen, M.A.F.; Németh, A.A.; Roos, P.C.; Vittori, G. The morphodynamics of tidal sand waves: A model overview. Coast. Eng. 2008, 55, 657–670. [Google Scholar] [CrossRef]
- Németh, A.A.; Hulscher, S.J.M.H.; Van Damme, R.M.J. Simulating offshore sand waves. Coast. Eng. 2006, 53, 265–275. [Google Scholar] [CrossRef]
- Fenster Michael, S.; Fitzgerald Duncan, M.; Bohlen, W.F.; Lewis Ralph, S.; Baldwin Christopher, T. Stability of giant sand waves in eastern Long Island Sound, U.S.A. Elsevier 1990, 91. [Google Scholar] [CrossRef]
- Ingersoll, R.W.; Ryan, B.A. Repetitive surveys to assess sand ridge movement offshore Sable Island. In Proceedings of the Oceans 97 MTS/IEEE Conference, Halifax, NS, Canada, 6–9 October 1997. [Google Scholar] [CrossRef]
- Salvatierra, M.M.; Aliotta, S.; Ginsberg, S.S. Morphology and dynamics of large subtidal dunes in Bahia Blanca estuary, Argentina. Geomorphology 2015, 246, 168–177. [Google Scholar] [CrossRef]
- Zhou, J.Q.; Wu, Z.Y.; Jin, X.L.; Zhao, D.N.; Cao, Z.Y.; Guan, W.B. Observations and analysis of giant sand wave fields on the Taiwan Banks, northern South China Sea. Mar. Geol. 2018, 406, 132–141. [Google Scholar] [CrossRef]
- Traykovski, P.; Hay, A.E.; Irish, J.D.; Lynch, J.F. Geometry, migration, and evolution of wave orbital ripples at LEO-15. J. Geophys. Res.-Oceans 1999, 104, 1505–1524. [Google Scholar] [CrossRef]
- Malikides, M.; Harris, P.T.; Tate, P.M. Sediment transport and flow over sandwaves in a non-rectilinear tidal environment: Bass Strait, Australia. Cont. Shelf Res. 1989, 9, 203–221. [Google Scholar] [CrossRef]
- Jo, H.R.; Lee, H.J. Sediment transport processes over a sand bank in macrotidal Garolim Bay, west coast of Korea. Geosci. J. 2008, 12, 243–253. [Google Scholar] [CrossRef]
- Fox, C.G. In situ ground deformation measurements from the summit of Axial Volcano during the 1998 volcanic episode. Geophys. Res. Lett. 1999, 26, 3437–3440. [Google Scholar] [CrossRef]
- Fox, C.G.; Chadwick, W.W.; Embley, R.W. Direct observation of a submarine volcanic eruption from a sea-floor instrument caught in a lava flow. Nature 2001, 412, 727–729. [Google Scholar] [CrossRef] [PubMed]
- Hino, R.; Inazu, D.; Ohta, Y.; Ito, Y.; Suzuki, S.; Iinuma, T.; Osada, Y.; Kido, M.; Fujimoto, H.; Kaneda, Y. Was the 2011 Tohoku-Oki earthquake preceded by aseismic preslip? Examination of seafloor vertical deformation data near the epicenter. Mar. Geophys. Res. 2014, 35, 181–190. [Google Scholar] [CrossRef]
- Wallace, L.M.; Webb, S.C.; Ito, Y.; Mochizuki, K.; Hino, R.; Henrys, S.; Schwartz, S.Y.; Sheehan, A.F. Slow slip near the trench at the Hikurangi subduction zone, New Zealand. Science 2016, 352, 701–704. [Google Scholar] [CrossRef]
- Phillips, K.A.; Chadwell, C.D.; Hildebrand, J.A. Vertical deformation measurements on the submerged south flank of Kīlauea volcano, Hawai’i reveal seafloor motion associated with volcanic collapse. J. Geophys. Res. Solid Earth 2008, 113. [Google Scholar] [CrossRef]
- Ballu, V.; Ammann, J.; Pot, O.; Viron, O.; Sasagawa, G.S.; Reverdin, G.; Bouin, M.-N.; Cannat, M.; Deplus, C.; Deroussi, S.; et al. A seafloor experiment to monitor vertical deformation at the Lucky Strike volcano, Mid-Atlantic Ridge. J. Geod. 2009, 83, 147–159. [Google Scholar] [CrossRef]
- Chadwick, W.W.; Nooner, S.L.; Butterfield, D.A.; Lilley, M.D. Seafloor deformation and forecasts of the April 2011 eruption at Axial Seamount. Nat. Geosci. 2012, 5, 474–477. [Google Scholar] [CrossRef]
- Yokoyama, T.; Shimoyama, M.; Matsuda, S.; Tago, K.; Takeshima, J.; Nakatsuka, Y. Monitoring System of Seafloor Subsidence for Methane Hydrate Production Test. In Proceedings of the SPWLA 18th Formation Evaluation Symposium of Japan, Chiba, Japan, 27 September 2012; p. 6. [Google Scholar]
- Stenvold, T.; Eiken, O.; Zumberge, M.A.; Sasagawa, G.S.; Nooner, S.L. High-precision relative depth and subsidence mapping from seafloor water-pressure measurements. SPE J. 2006, 11, 380–389. [Google Scholar] [CrossRef]
- Lobo, F.J.; Hernández-Molina, F.J.; Somoza, L.; Rodero, J.; Maldonado, A.; Barnolas, A. Patterns of bottom current flow deduced from dune asymmetries over the Gulf of Cadiz shelf (southwest Spain). Mar. Geol. 2000, 164, 91–117. [Google Scholar] [CrossRef]
- McKelvey, D.; Honkalehto, T.; Williamson, N.J. Results of the March 2006 Echo Integration-Trawl Survey of Walleye Pollock (Theragra Chalcogramma) Conducted in the Southeastern Aleutian Basin Near Bogoslof Island, Cruise MF2006-03; NOAA: Silver Spring, MD, USA, 2006. [Google Scholar]
- Bassoullet, P.; Le Hir, P.; Gouleau, D.; Robert, S. Sediment transport over an intertidal mudflat: Field investigations and estimation of fluxes within the “Baie de Marenngres-Oleron” (France). Cont. Shelf Res. 2000, 20, 1635–1653. [Google Scholar] [CrossRef]
- Ashley, G.M. Classification of large-scale subaqueous bedforms; a new look at an old problem. J. Sediment. Res. 1990, 60, 160–172. [Google Scholar] [CrossRef]
- Liu, X.; Zheng, X.; Zhang, B.; Jia, Y.; Tian, Z.; Ji, C. A Multistage Penetrating In-Situ Device and Method to Observe Sand Waves on the Seabed Based on Resistivity Probe. Australia Patent AU2019100321, 2 May 2019. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Characteristic Parameters | |
|---|---|---|
| Sand Sample | Average particle diameter | 0.25 mm |
| Nonuniformity coefficient | 1.47 | |
| Curvature coefficient | 1.14 | |
| Buoyant unit weight | 16.2 N/cm3 | |
| AA400 | Accuracy | 1 mm |
| Range | 0.15–100 m | |
| Ultrasonic terrain scanner | Accuracy | 1 mm |
| Range | 0.1–2 m | |
| Pressure sensor | Accuracy | 0.5% |
| Range | 0–20 kPa | |
| Fiber optic pressure sensor | Accuracy | 1‰ F.S |
| Range | 0–30 kN | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zheng, X.; Tian, Z.; Zhang, H.; Chen, T. Pressure Sensing Technique for Observing Seabed Deformation Caused by Submarine Sand Wave Migration. J. Mar. Sci. Eng. 2020, 8, 315. https://doi.org/10.3390/jmse8050315
Liu X, Zheng X, Tian Z, Zhang H, Chen T. Pressure Sensing Technique for Observing Seabed Deformation Caused by Submarine Sand Wave Migration. Journal of Marine Science and Engineering. 2020; 8(5):315. https://doi.org/10.3390/jmse8050315
Chicago/Turabian StyleLiu, Xiaolei, Xiaoquan Zheng, Zhuangcai Tian, Hong Zhang, and Tian Chen. 2020. "Pressure Sensing Technique for Observing Seabed Deformation Caused by Submarine Sand Wave Migration" Journal of Marine Science and Engineering 8, no. 5: 315. https://doi.org/10.3390/jmse8050315
APA StyleLiu, X., Zheng, X., Tian, Z., Zhang, H., & Chen, T. (2020). Pressure Sensing Technique for Observing Seabed Deformation Caused by Submarine Sand Wave Migration. Journal of Marine Science and Engineering, 8(5), 315. https://doi.org/10.3390/jmse8050315