Wave Front Steepness and Influence on Horizontal Deck Impact Loads

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods and Formulations
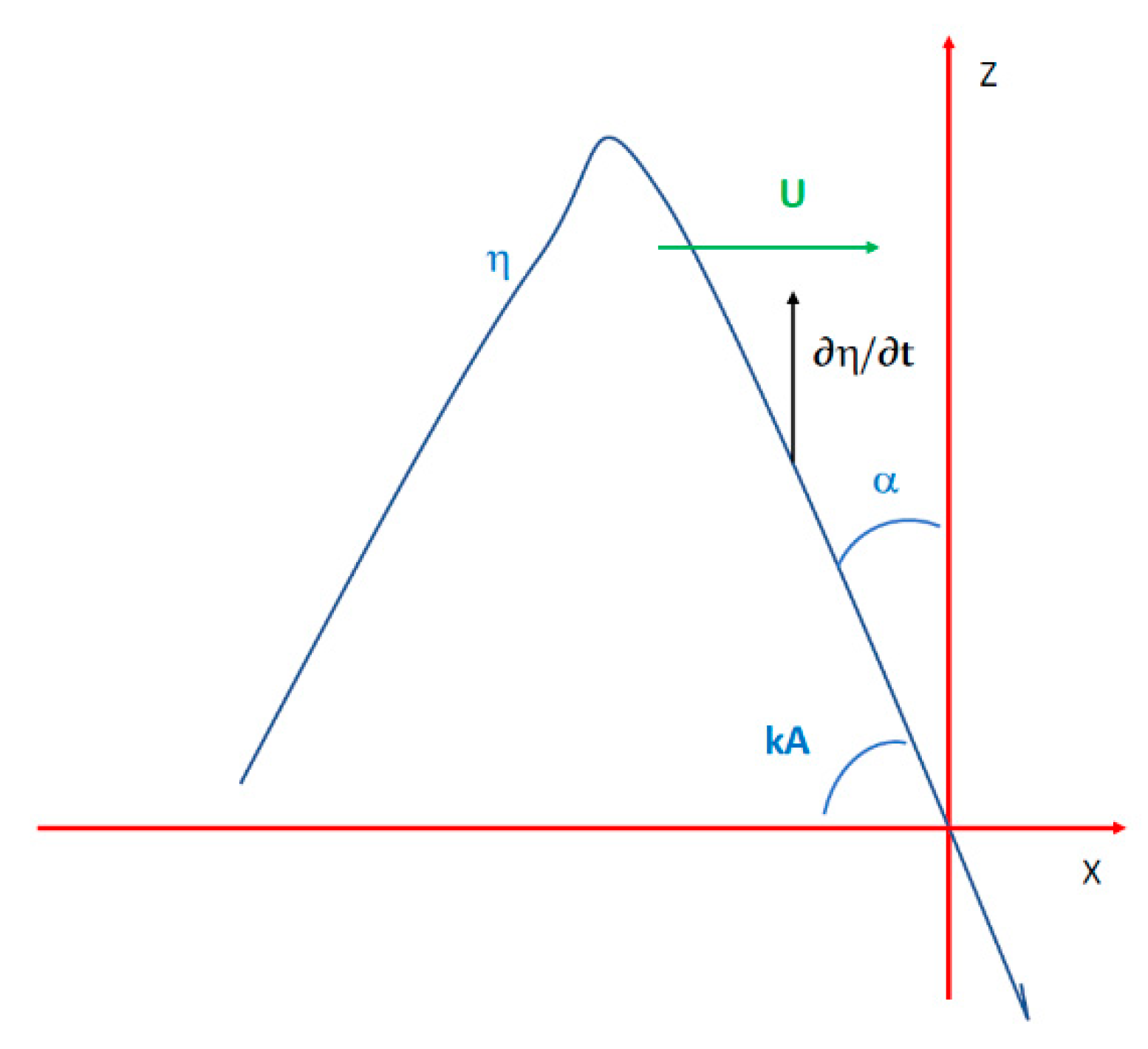
2.1. Wave Steepness Parameter
2.2. Simplified Horizontal Wave-in-Deck Load Model
- (i)
- an assumed relationship and similarity between the vertical rise velocity ∂η/∂t and the free-surface orbital velocity u; and
- (ii)
- the fact that the orbital velocity u can, at least in a linear regular wave, be written as the product of the phase velocity and the local steepness (slope) ∂η/∂x = kA:u = Cp∙(kA)
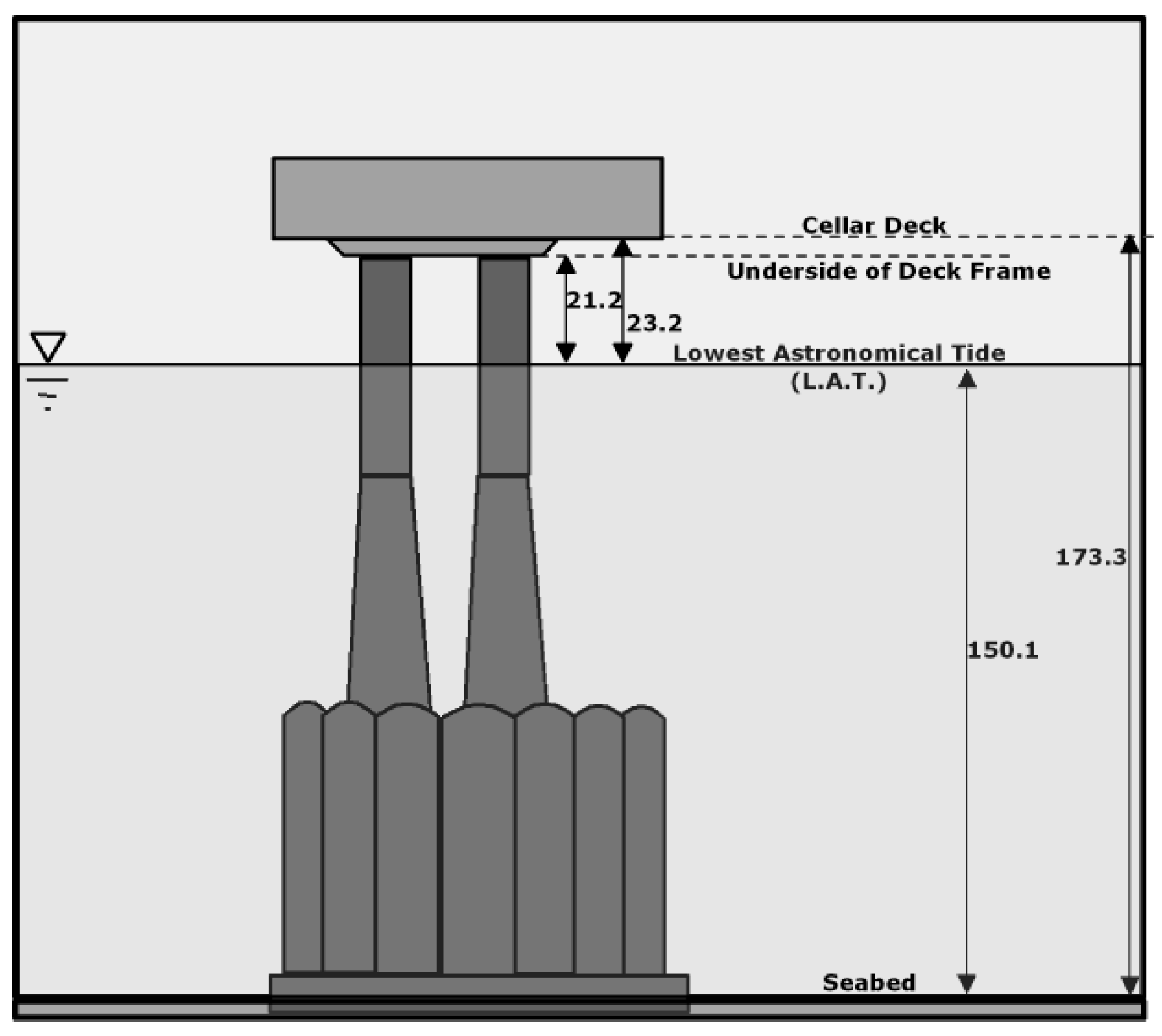
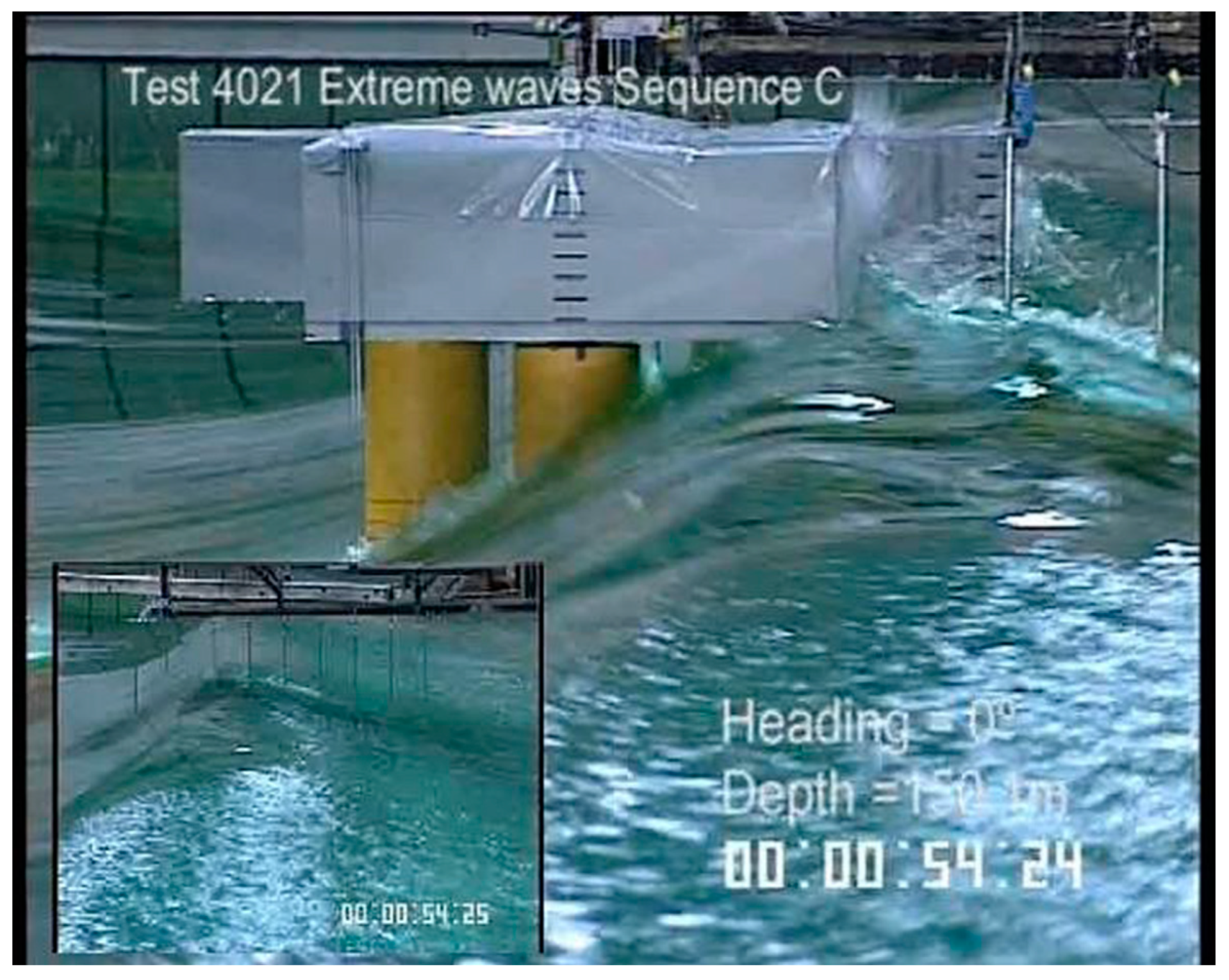
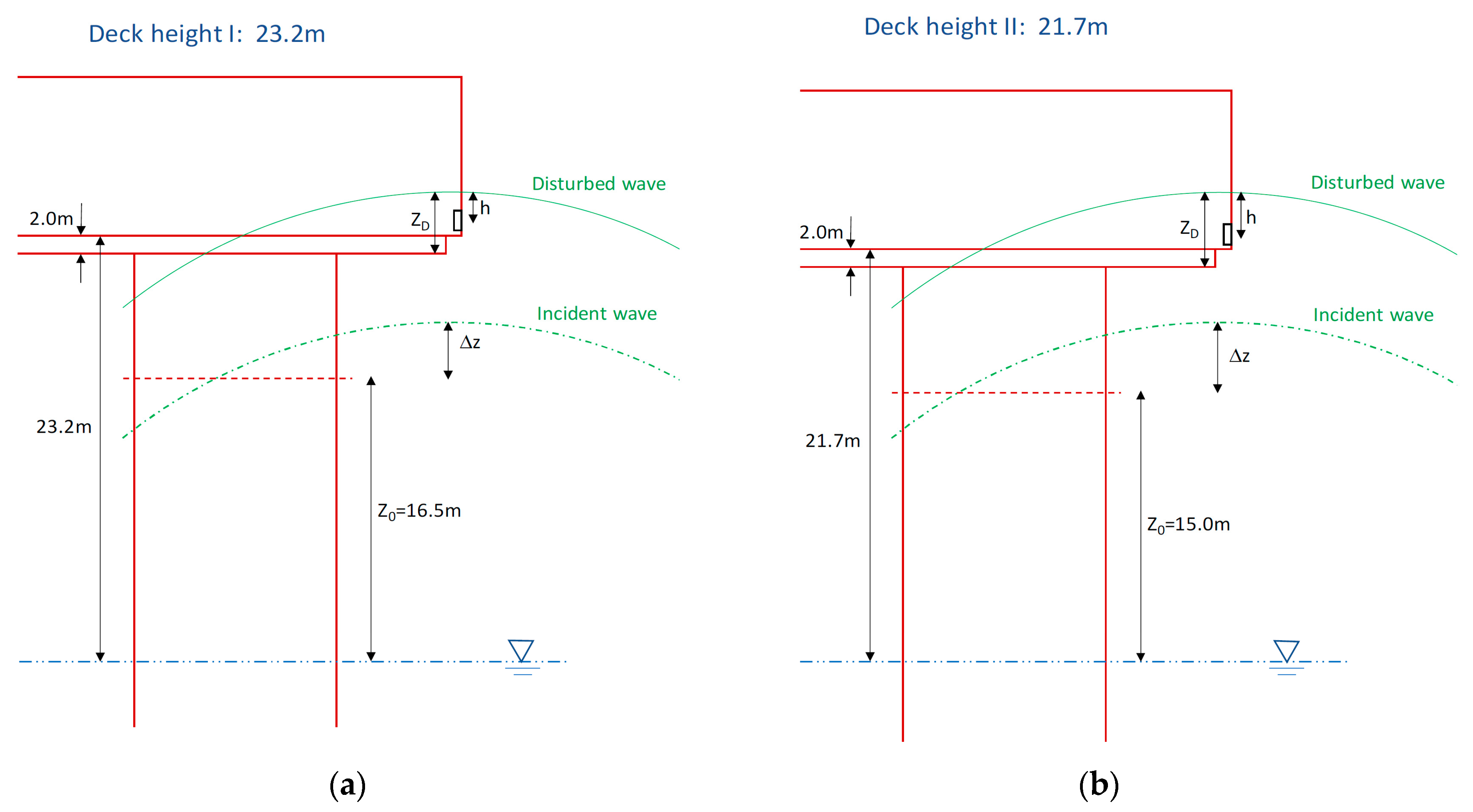
3. Experimental Test Case: Wave-in-Deck Loads on GBS
3.1. Brief Review of Experiment
3.2. Practical Use of Slamming Load Formulation
4. Results with Discussion
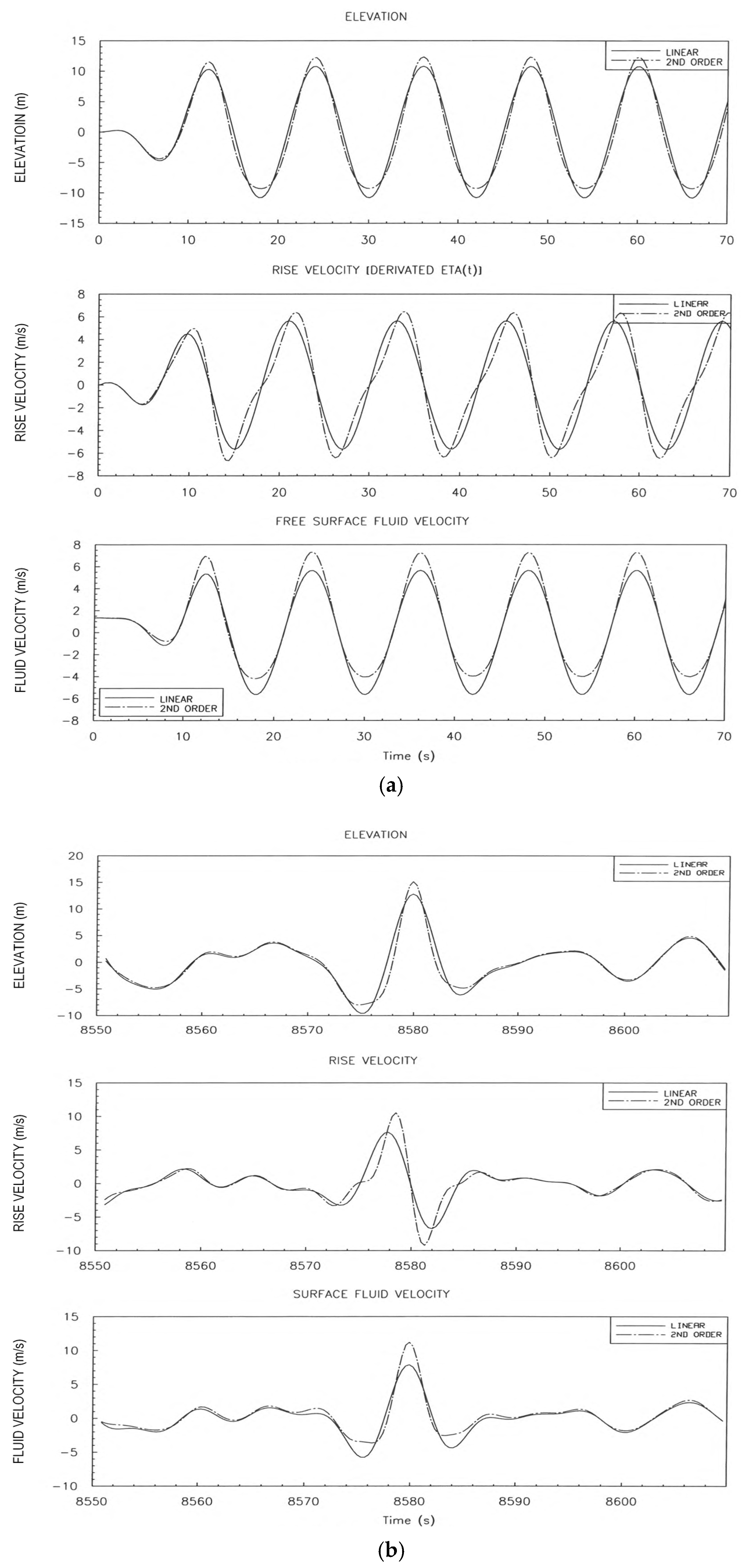
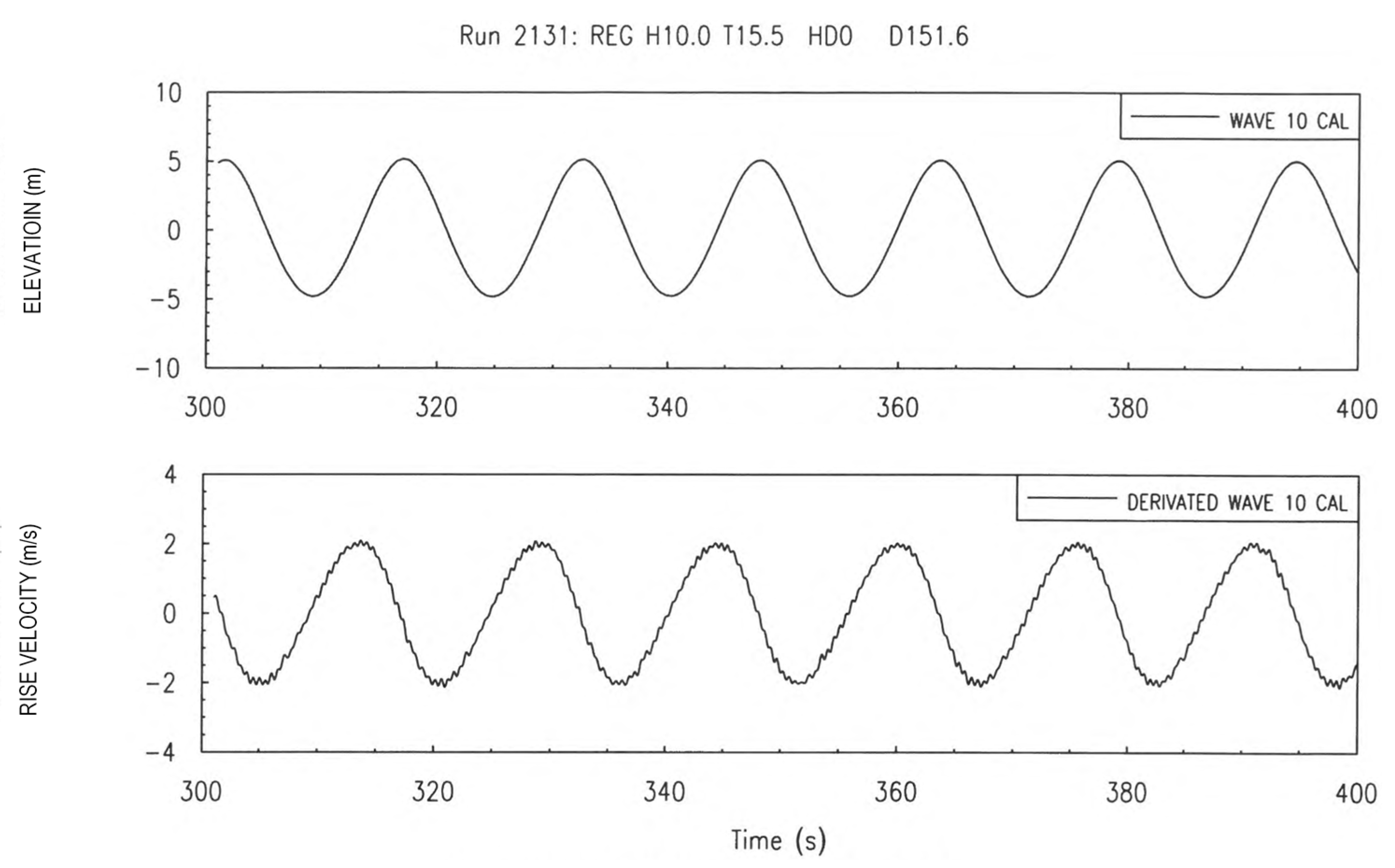
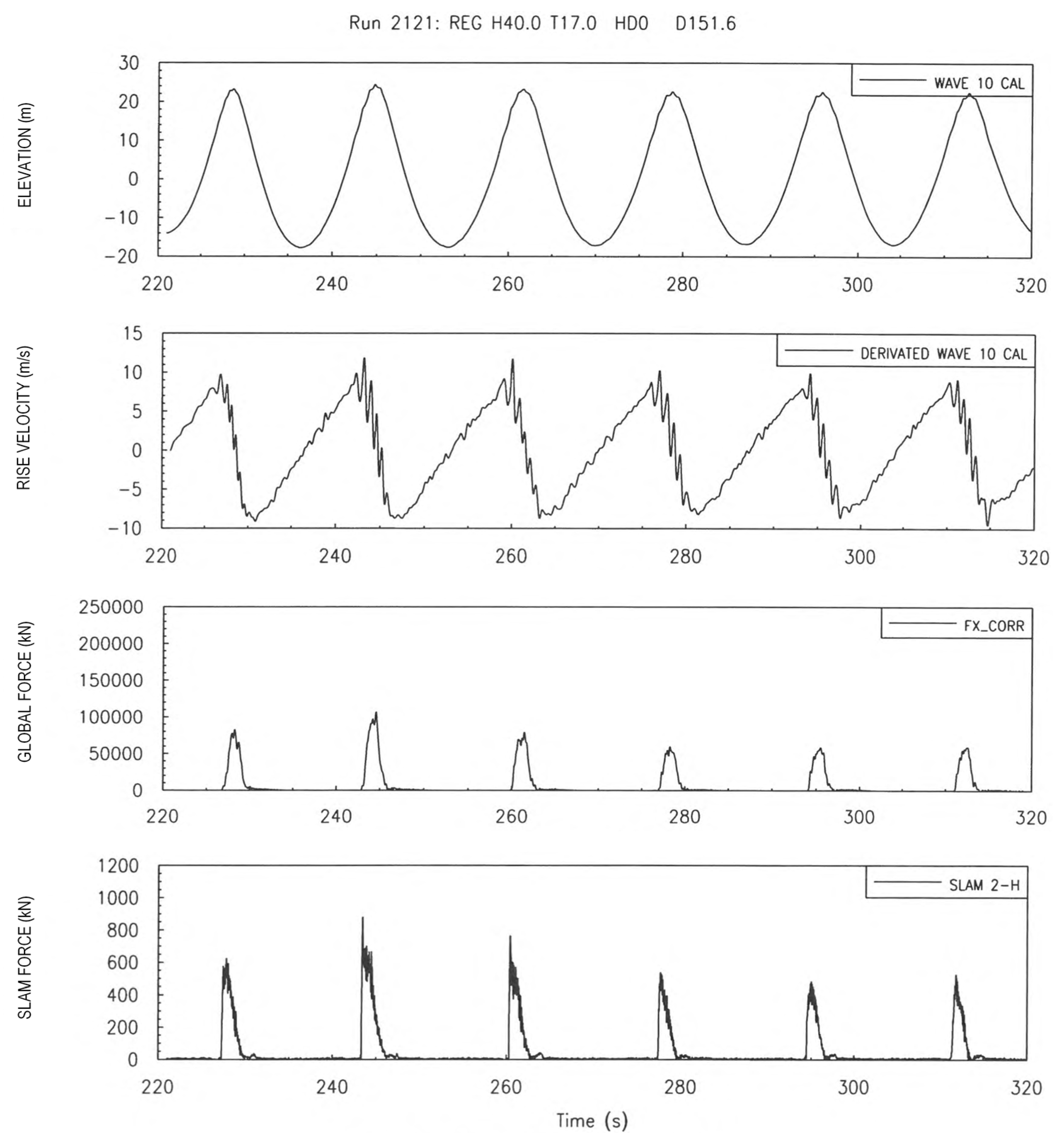
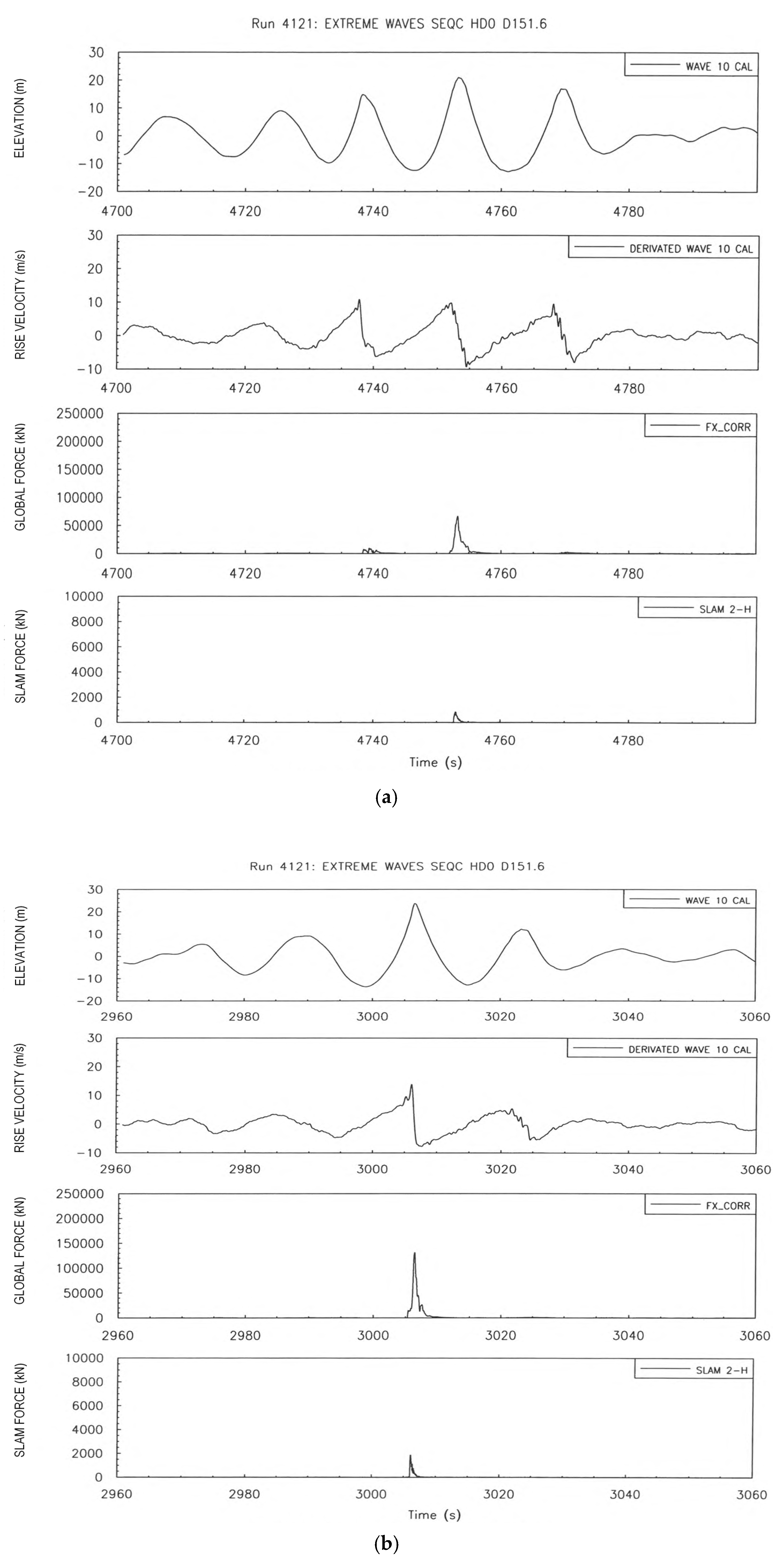
4.1. Time Series, Regular Waves
4.2. Time Series, Irregular Waves
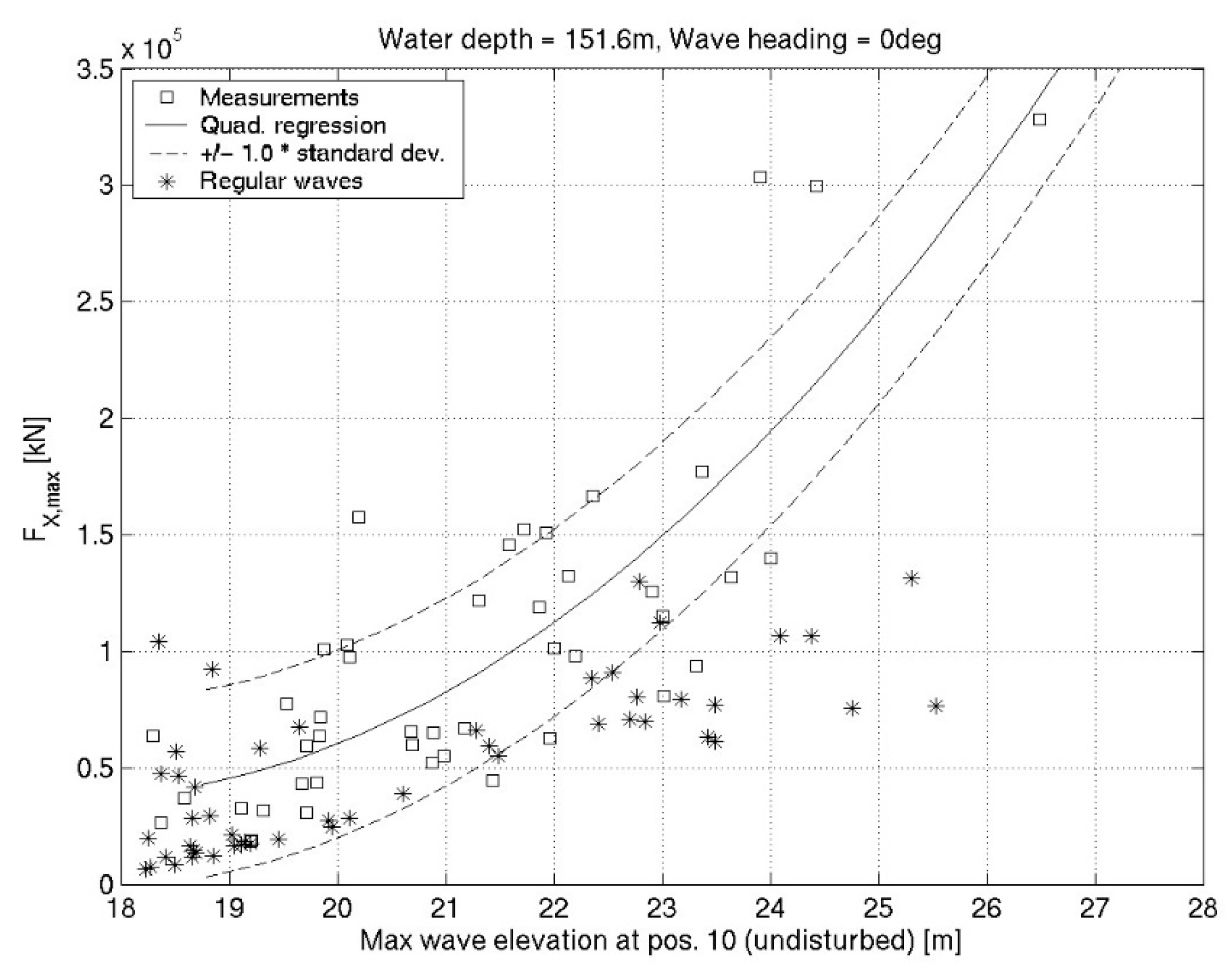
4.3. Correlation of Deck Loads Against Wave Parameters and Theoretical Estimates
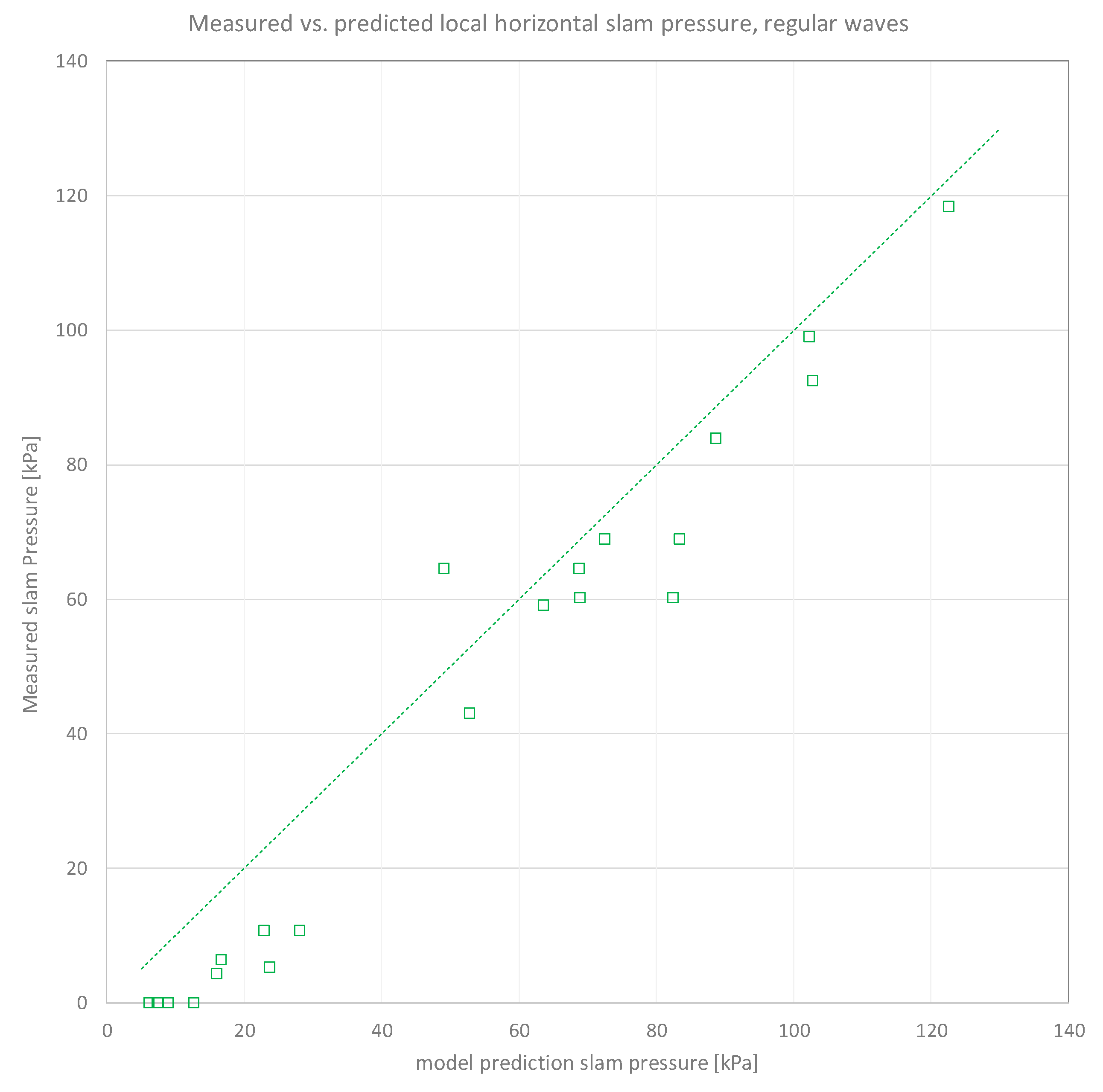
4.3.1. Regular Waves
4.3.2. Irregular Waves
- -
- Green square markers denote regular waves (with rise velocities between 7 and 12 m/s).
- -
- Brown triangle markers denote irregular wave events with velocities < 14 m/s, which we found to be a reasonable level class corresponding to the lowest wave-in-deck loads in irregular waves.
- -
- Blue circles denote events with velocities between 14 and 20 m/s, for which we found that impact loads mostly grow quite high,
- -
- Red crosses denote the events with the highest velocities, i.e., >20 m/s (the estimated celerity).
4.4. Discussion
5. Summary with Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- PSA. Granskingsrapport Etter Hendelse Med fatalt Utfall på COSL Innovator 30, December 2015, Report, Revised version; Petroleum Safety Authority Norway: Stavanger, Norway, 6 July 2016. (In Norwegian) [Google Scholar]
- DNV GL OTG-13. Prediction of Air Gap for Column Stabilized Units; DNV GL Guideline: Høvik, Norway, 2019. [Google Scholar]
- DNV GL OTG-14. Horizontal Wave Impact Loads for Column Stabilized Units; DNV GL Guideline: Høvik, Norway, 2019. [Google Scholar]
- Kaplan, P.; Murray, J.J.; Yu, W.C. Theoretical analysis of wave impact forces on platform deck structures. In Proceedings of the 14th International Conference on Offshore Mechanics and Arctic Engineering, Copenhagen, Denmark, 18–22 June 1995. [Google Scholar]
- RP2A-WSD, American Petroleum Institute. Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms—Working Stress Design, 21st ed.; American Petroleum Institute: Washington, DC, USA, 2000. [Google Scholar]
- Winterstein, S.R.; Sweetman, B. Air Gap Response of Floating Structures: Statistical Predictions vs. Observed Behavior; Paper # OMAE 99-6042. Proceeding of the 18th International Offshore MeCHANICS & Arctic Engineering Conference (OMAE 99), St. John’s, NFL, Canada, 11–16 June 1999. [Google Scholar]
- DNVGL-RP-C205. Environmental Conditions and Environmental Loads; DNV GL Recommended Practice: Høvik, Norway, 2019; Chapter 8. [Google Scholar]
- Stansberg, C.T.; Baarholm, R.; Fokk, T.; Gudmestad, O.T.; Haver, S. Wave Amplification and Possible Deck Impact on a Gravity Based Structure in 10-4 Probability Extreme Crest Heights; Paper # OMAE2004-51506. In Proceedings of the 23rd International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2004), Vancouver, BC, Canada, 20–25 June 2004. [Google Scholar]
- Scharnke, J.; Lindeboom, R.; Duz, B. Wave-in-deck loads in relation with wave kinematics. In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2017), Trondheim, Norway, 25–30 June 2017. Paper No. OMAE2017-61406. [Google Scholar]
- Yan, B.; Luo, M.; Bai, W. An experimental and numerical study of plunging wave impact on a box-shape structure. Mar. Struct. 2019, 66, 272–287. [Google Scholar] [CrossRef]
- Ma, L.; Swan, C. An experimental study of wave-in-deck loading and its dependence on the properties of the incident waves. J. Fluids Struct. 2020, 92, 102784. [Google Scholar] [CrossRef]
- Pakozdi, C.; Östman, A.; Ji, G.; Stansberg, C.T.; Reum, O.; Øvrebø, S.; Vestbøstad, T.; Sørvaag, C.; Ersland, J. Estimation of wave loads due to green water events in 10000-year conditions on a TLP deck structure. In Proceedings of the 35th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2016), Busan, Korea, 19–24 June 2016. Paper # OMAE2016-54389. [Google Scholar]
- Duz, B.; Lindeboom, R.C.J.; Scharnke, J.; Helder, J.; Bandringa, H. Comparison of breaking wave kinematics form numerical simulations with PIV measurements. In Proceedings of the 36th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2017), Trondheim, Norway, 25–30 June 2017. Paper # OMAE2017-61698. [Google Scholar]
- Albarello, A.; Pakozdi, C.; Nelli, F.; Bitner-Gregersen, E.M. Three dimensional velocity field underneath a breaking rogue wave. In Proceedings of the 36th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2017), Trondheim, Norway, 25–30 June 2017. Paper # OMAE2017-61237. [Google Scholar]
- Albarello, A.; Iafrati, A. The velocity field underneath a breaking rogue wave: Laboratory experiments versus numerical simulations. Fluids 2019, 4, 68. [Google Scholar] [CrossRef]
- Petrini, F.; Manenti, S.; Gkoumas, K.; Bontempi, F. Structural design and analysis of offshore wind turbines from a system point of view. Wind. Eng. 2010, 34, 85–108. [Google Scholar] [CrossRef]
- Manenti, S.; Petrini, F. Dynamic Analysis of an Offshore Wind Turbine: Wind-Waves Nonlinear Interaction. In Proceedings of the 12th International Conference on Earth and Space, Honolulu, HI, USA, 14–17 March 2010; Code 81209. pp. 2014–2026. [Google Scholar]
- Vestbøstad, T.M.; Økland, O.D.; Lian, G.; Stavang, T.P. Column Slamming Loads on a TLP From Steep and Breaking Waves. In Proceedings of the 36th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2017), Trondheim, Norway, 25–30 June 2017. Paper # OMAE2017-61786. [Google Scholar]
- Huang, Z.; Spencer, D.; Oberlies, R.; Watts, G.; Xiao, W. Wave Impact Experiment of a GBS Model in Large Waves. In Proceedings of the 36th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2017), Trondheim, Norway, 25–30 June 2017. Paper # OMAE2017-61473. [Google Scholar]
- Stansberg, C.T. A Wave Impact Parameter. In Proceedings of the 27th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2008), Estoril, Portugal, 15–20 June 2008. Paper # OMAE2008-57801. [Google Scholar]
- Bunnik, T.; Pakozdi, C.; Stansberg, C.T.; Fouques, S.; Somers, L. Useful Indicators for Screening of Sea States for Wave Impacts on Fixed and Floating Platforms. In Proceedings of the 37th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2018), Madrid, Spain, 17–22 June 2018. Paper # OMAE2018-78544. [Google Scholar]
- Bunnik, T.; Scharnke, J.; de Ridder, E.-J. Efficient indicators for screening of random waves for wave impacts on a jacket platform and a fixed offshore wind turbine. In Proceedings of the 38th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2019), Glasgow, UK, 9–14 June 2019. Paper # OMAE2019-95481. [Google Scholar]
- Bitner-Gregersen, E.M.; Mørk, K.; Stansberg, C.T. Extreme Wave Steepness of Second- and Third Order Model Waves. In Proceedings of the 5th International Offshore and Polar Engineering Conference, The Hague, The Netherlands, 11–16 June 1995; pp. 70–74. [Google Scholar]
- Voogt, A.J.; Buchner, B.; Garcia, J.L.-C. Wave Impacts Excitation on Ship-Type Offshore Structures in Steep Fronted Waves. In Proceedings of the OMAE Speciality Conference on Integrity of Floating Production, Storage & Offloading (FPSO) Systems, Houston, TX, USA, 30 August–2 September 2004. [Google Scholar]
- Wagner, H. Über Stoß- und Gleitvorgänge an der Oberfläche von Flüssigkeiten. ZAMM 1932, 12, 193–215. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990; Chapter 9. [Google Scholar]
- Stansberg, C.T.; Gudmestad, O.T.; Haver, S.K. Kinematics Under Extreme Waves. J. Offshore Mech. Arct. Eng. 2008, 130, 021010. [Google Scholar] [CrossRef]
- Stansberg, C.T.; Kristiansen, T. Non-linear scattering of steep surface waves around vertical columns. Appl. Ocean Res. 2005, 27, 65–80. [Google Scholar] [CrossRef]
- Stansberg, C.T. Nonlinear Wave Amplification around Column-Based Platforms in Steep Waves. In Proceedings of the 33rd International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2014), San Francisco, CA, USA, 8–13 June 2014. Paper # OMAE2014-24569. [Google Scholar]
- Longuet-Higgins, M.S. Progress Toward Understanding How Waves Break. In Proceedings of the 21st Symposium on Naval Hydrodynamics, Trondheim, Norway, August 1997; The National Academies Press: Washington, DC, USA, 1997; pp. 7–28. [Google Scholar]
- Stansberg, C.T.; Berget, K.; Graczyk, M.; Muthanna, C.; Pakozdi, C. Breaking Wave Kinematics and Resulting Slamming Pressures on a Vertical Column. In Proceedings of the 31st International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2012), Rio de Janeiro, Brazil, 1–6 June 2012. Paper No. OMAE2013-83929. [Google Scholar]
- Roos, J.; Swan, C.; Haver, S. Wave impacts on the column of a gravity based structure. In Proceedings of the 29th International Conference on Offshore Mechanics and Arctic Engineering (OMAE 2010), Shanghai, China, 6–11 June 2010. Paper No. OMAE2010-20648. [Google Scholar]
- Pakozdi, C.; Ostman, A.; Stansberg, C.T.; Peric, M.; Lu, H.; Baarholm, R. Estimation of Wave in Deck Load Using CFD Validated Against Model Test Data. In Proceedings of the 25th International Offshore and Polar Engineering Conference (ISOPE 2015), Kona, HI, USA, 21–26 June 2015. Paper TPC-1134. [Google Scholar]
- Abrahamsen, B.; Faltinsen, O.M. Decay of air cavity slamming pressure oscillations during sloshing at high fillings. In Proceedings of the 24th International Workshop on Water Waves and Floating Bodies, Zelenogorsk, St Petersburg, Russia, 6 March–21 April 2009; pp. 19–22. [Google Scholar]
- Cuomo, G.; Allsop, W.; Takahashi, S. Scaling wave impact pressures on vertical walls. Coast. Eng. 2010, 57, 604–609. [Google Scholar] [CrossRef]
















© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stansberg, C.T. Wave Front Steepness and Influence on Horizontal Deck Impact Loads. J. Mar. Sci. Eng. 2020, 8, 314. https://doi.org/10.3390/jmse8050314
Stansberg CT. Wave Front Steepness and Influence on Horizontal Deck Impact Loads. Journal of Marine Science and Engineering. 2020; 8(5):314. https://doi.org/10.3390/jmse8050314
Chicago/Turabian StyleStansberg, Carl Trygve. 2020. "Wave Front Steepness and Influence on Horizontal Deck Impact Loads" Journal of Marine Science and Engineering 8, no. 5: 314. https://doi.org/10.3390/jmse8050314
APA StyleStansberg, C. T. (2020). Wave Front Steepness and Influence on Horizontal Deck Impact Loads. Journal of Marine Science and Engineering, 8(5), 314. https://doi.org/10.3390/jmse8050314