Assessing Operability on Berthed Ships. Common Approaches, Present and Future Lines

 ,
,  ,
,  and
and 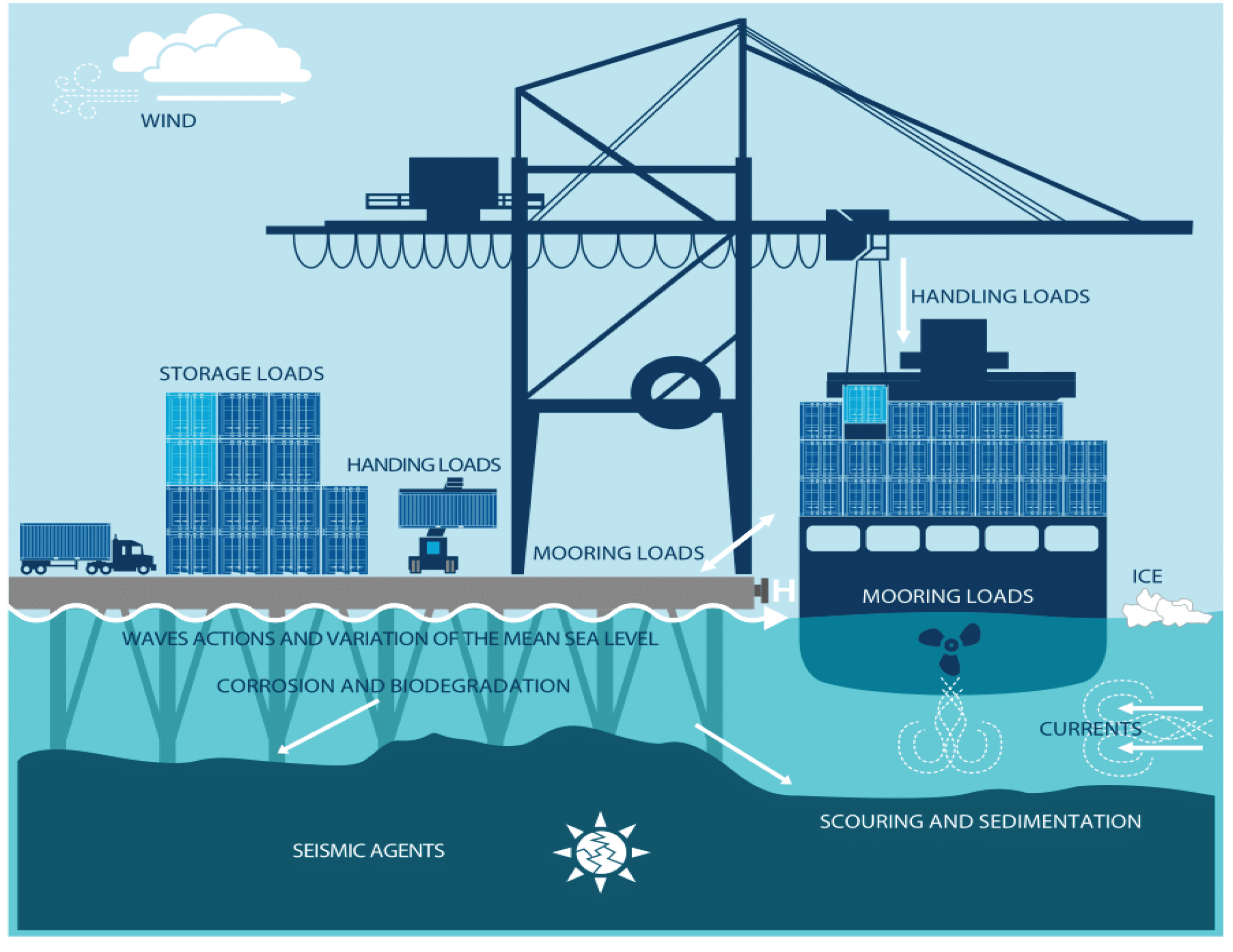{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
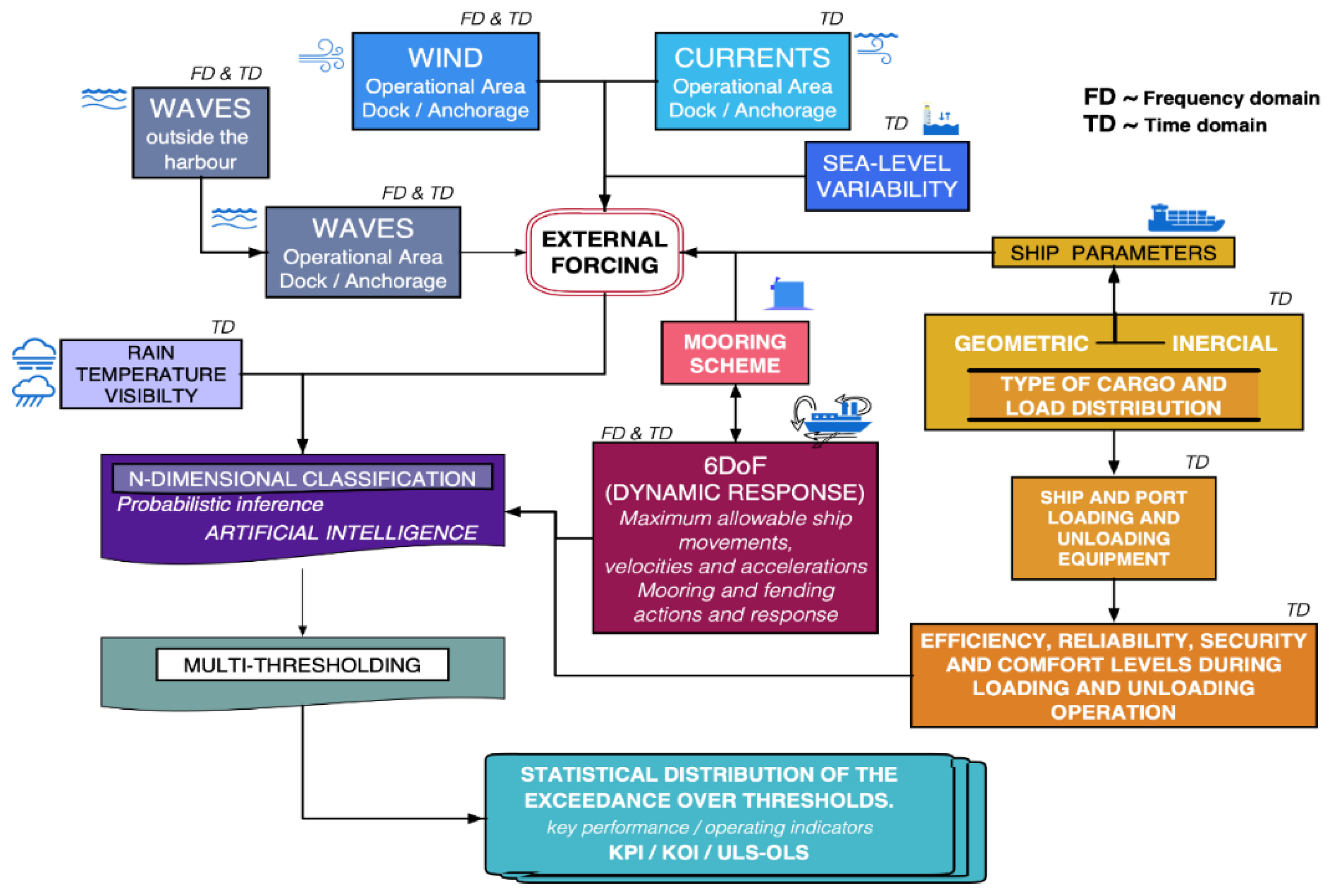
2. Factors Affecting the Operability of Berthed Ships
- On factors related to the ship itself and the port infrastructure
- On the forcing met-ocean agents that constrain and interact with the ship and the port infrastructure.
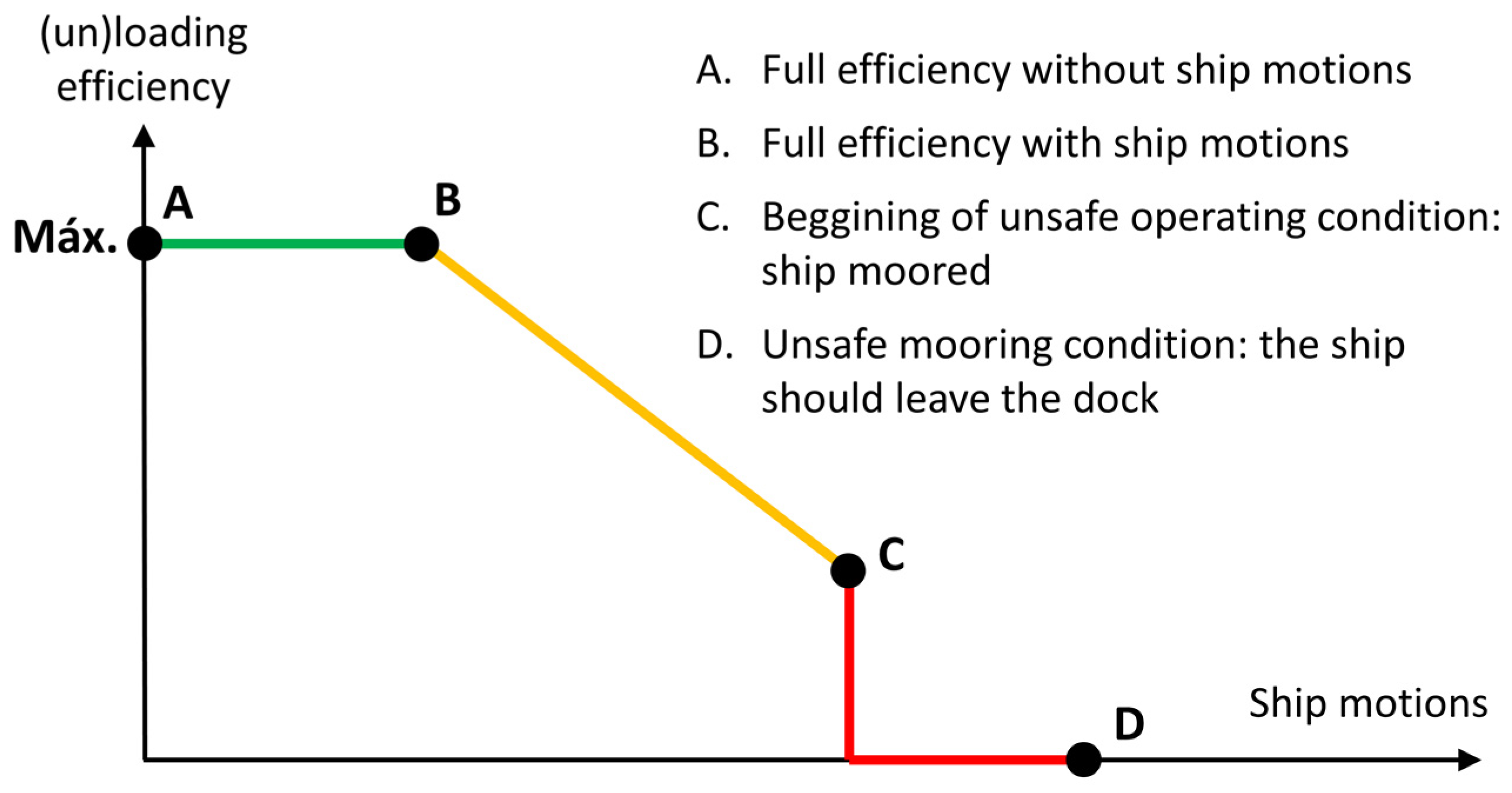
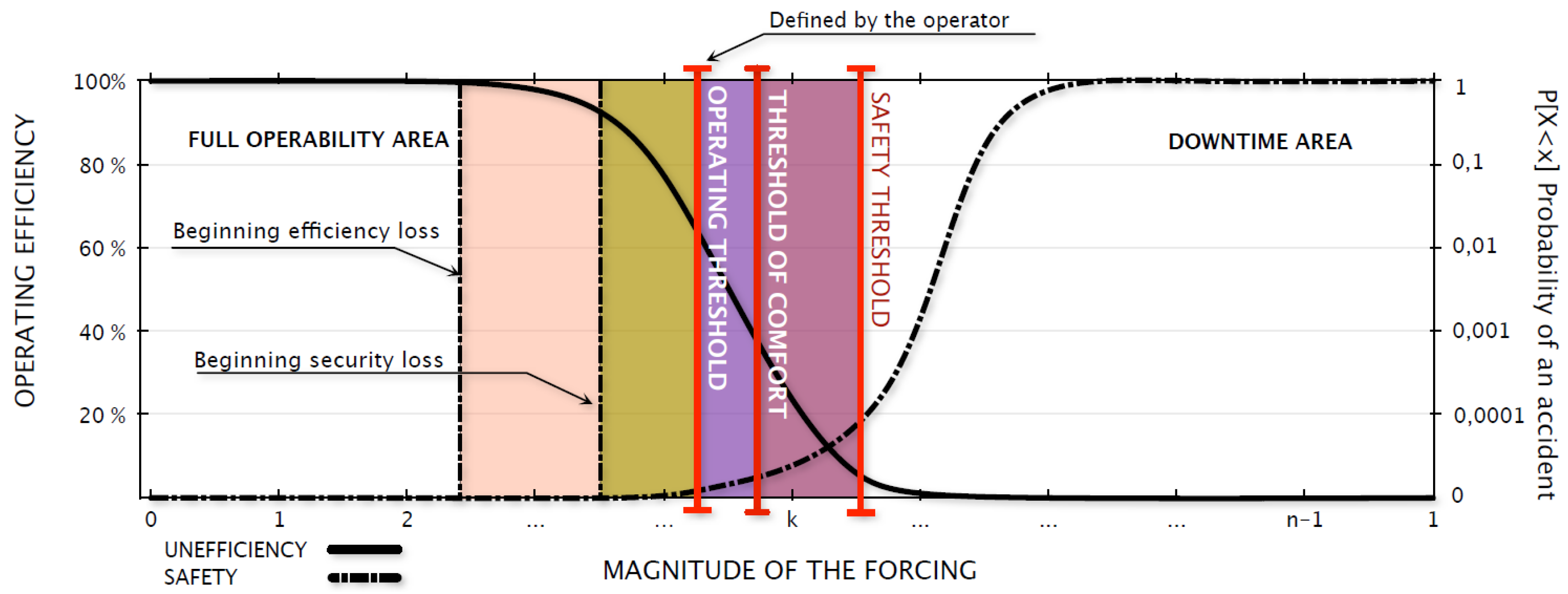
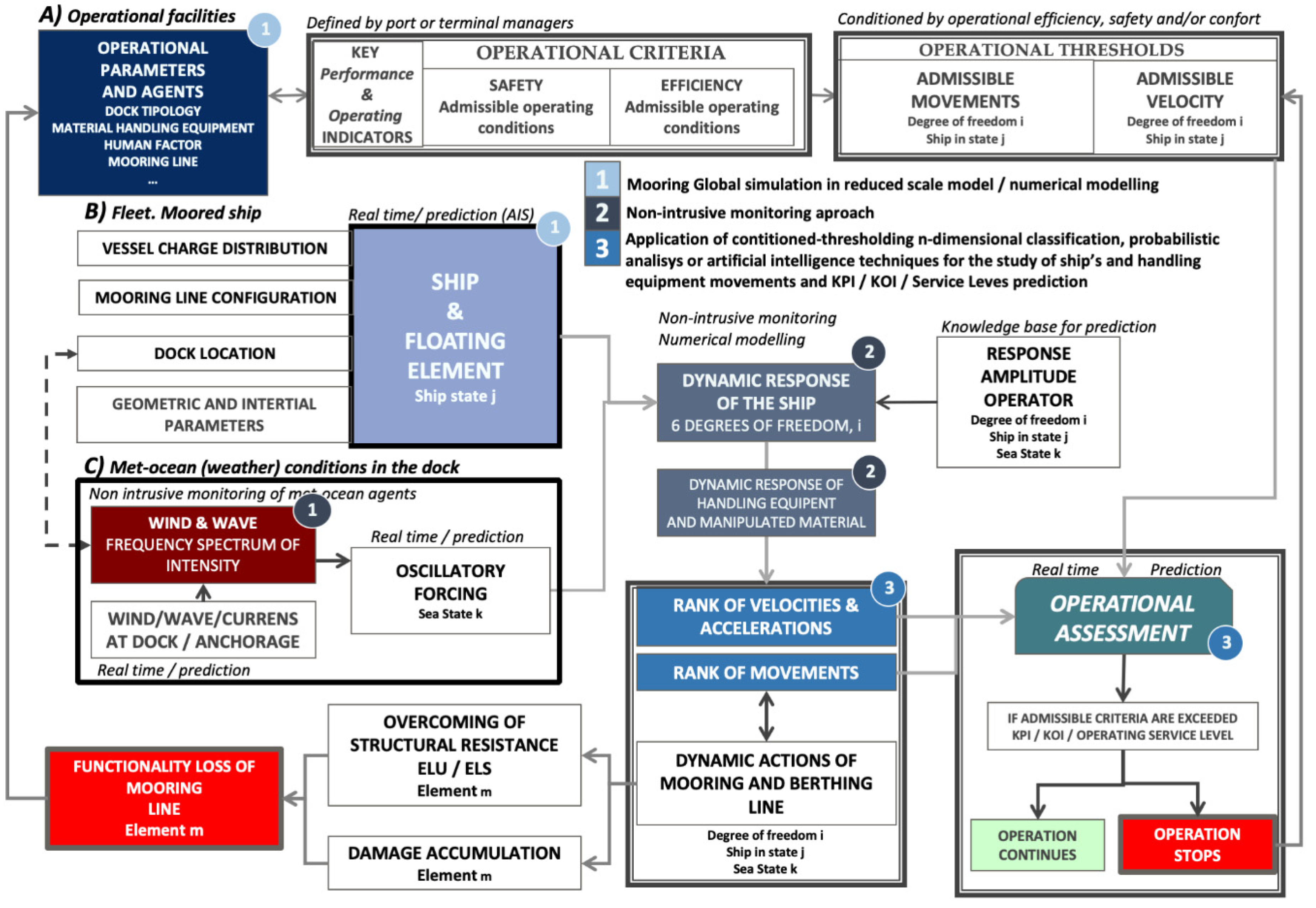
2.1. Dynamic Response of the Ship
- Between points A and B, small movements of the ship caused by met-ocean forcing agents and cargo handling do not alter productivity.
- Once a certain threshold is exceeded, a progressive decrease in efficiency between points B and C is initiated. In this scheme, the decrease is assumed to be linearly related to the ship movement.
- When the ship movements make the operation unsafe (point C), the (un)loading operations are stopped in order to prevent accidents.
- Finally, point D represents the limit mooring state: once it is reached the ship must leave the dock to prevent the rupture of fenders, bollards, mooring lines and the damage of the infrastructure and ship’ hull.
2.2. Factors from the Ship Itself and the Port Infrastructure
2.3. Forcing Met-Ocean Agents
2.4. Difficulties for the Characterization of the Factors Affecting the Operability of Berthed Ships
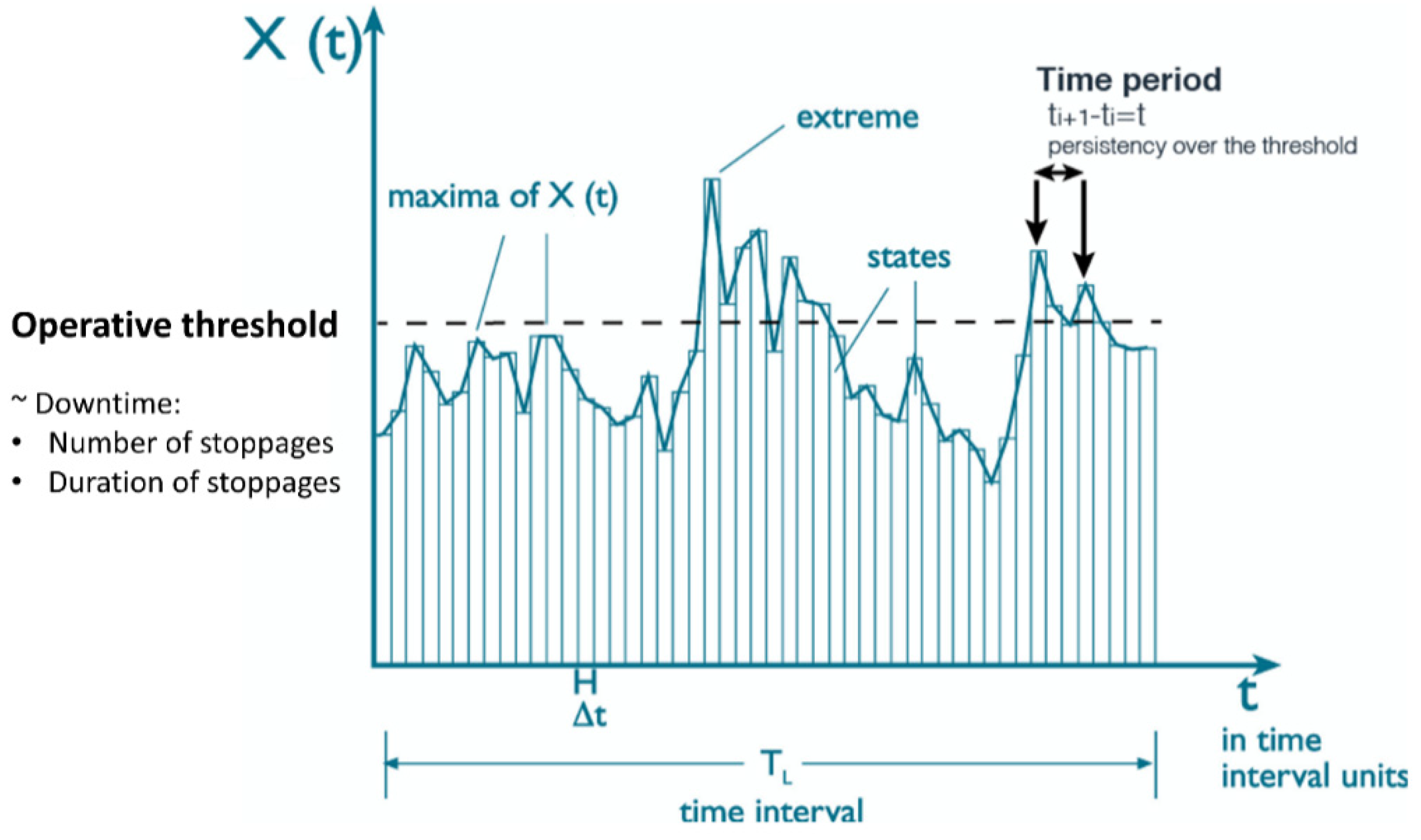
- In general, limitations are identified in the methodology for characterizing the forcing agents. Being a highly dynamic process, stationery and time-averaged analyses shed limited light on how they affect the ship’s movements. Statistical treatments based on zero down-crossing (or up-crossing) analysis, which are common for studying instrumental records of variables such as wave height, need to set a medium level. This means that following this approach the water level is assumed to remains still at a mean level during each operation or, in other words, that the oscillations which are more likely to provoke movements on large vessels (mainly long waves) are filtered out. There are alternative approaches, such as Rainflow methods (Castillo et al. 2012, [43], Gómez et al. 2013, [44]), which allow for the records to be analyzed independently of the reference system by focusing on addressing the number of cycles and their average position in time. Finally, another limitation is assuming that the wave spectrum and the ship’s response are known, overlooking coupled relationships with other met-ocean agents.
- Regarding modeling, either physical or numerical, the estimation of the vessel motion and the characterization of the wide casuistic range is a complex exercise since it requires the proper simulation of met-ocean agents, the dynamic response of mooring lines, the vessel itself and its interaction with fenders and handling means. In particular, for physical modeling, the scale for allowing both short and long waves to be simulated in the same model requires large installations. Furthermore, in some cases, passive and active absorption systems are not able to adequately absorb low-frequency waves such as spurious waves or resonant waves linked to the natural periods of the experimentation areas (Cabrerizo et al., 2010 [45]). As discussed above, it is also important to include the operator in the modeling process, for example, by means of the Global Operational Simulation methodology presented in Cabrerizo et al. (2012 [14], 2015 [46]). Even if the entire process is successfully reproduced with a high degree of reliability, in order to evaluate the operability, it would still be necessary to simulate the (un)loading operation and to quantify the impact of the movements of the vessel on the performance, safety and quality of the service.
- Regarding the AOIs, there is a deficit in monitoring data from the movements of the vessel and in the onsite characterization of met-ocean agents. This is probably due to the difficulty of installing autonomous, nonintrusive and low-cost monitoring systems, which are three basic principles in the instrumental monitoring design defined in Cabrerizo et al. (2012) [47]. Today, there are numerous techniques that allows for meeting these requirements: laser techniques (Pérez-Arribas et al., 2005 [48]), stereoscopic vision combined with detection of highly reflective objects in infrared light (Johanning et al., 2007 [49], Malheiros et al., 2009 [50], Fujarra et al., 2009 [51]) and GPS-RTK systems combined with gyroscopes and accelerometers installed on board (Figuero et al., 2019 [52]).
3. Methodologies for the Characterization and Calculation of the Operability of Berthed Ships
3.1. Mono-Parametric Thresholding
3.2. Conditioned Thresholding
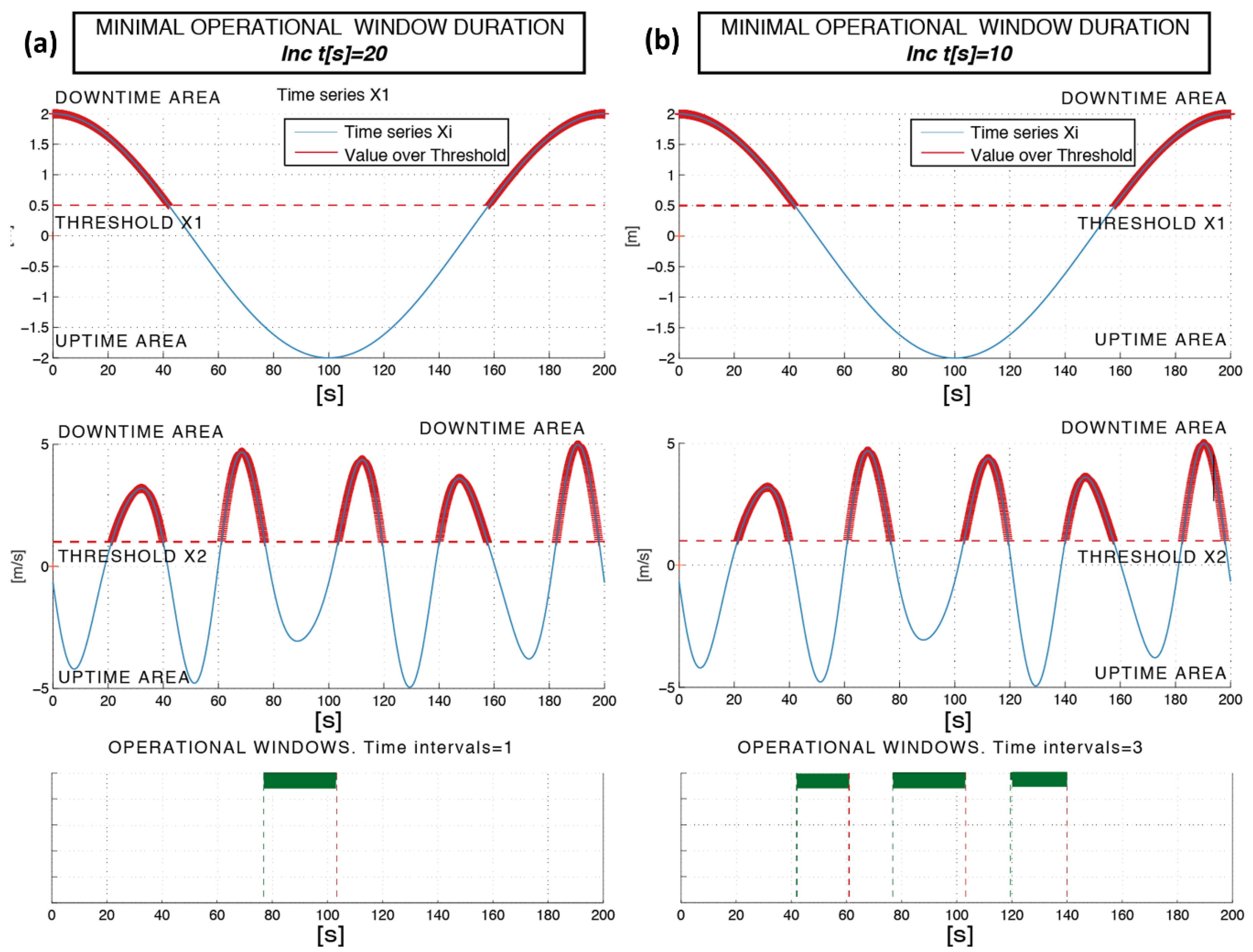
3.3. N-dimensional Thresholding
3.4. Inference Models
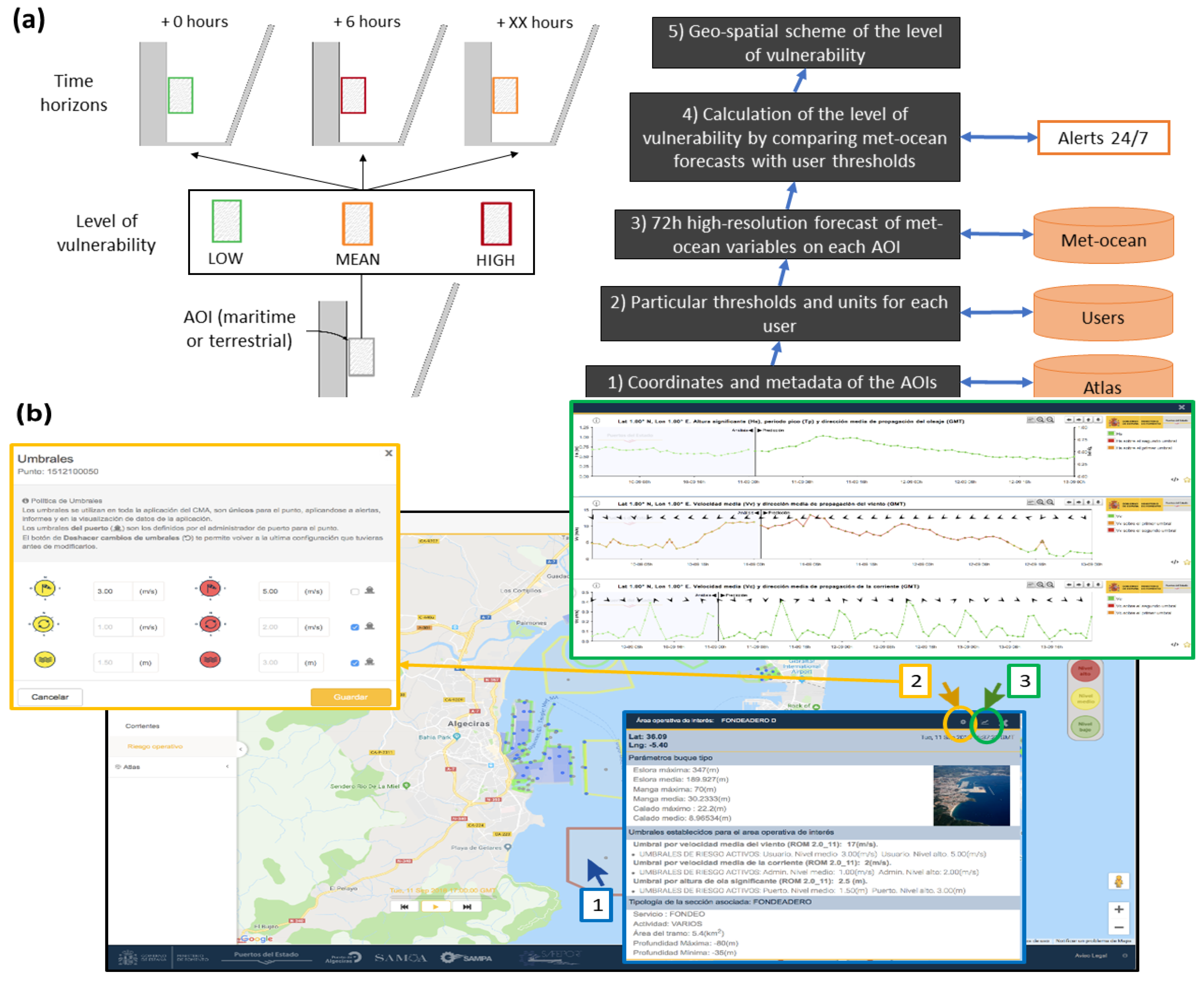
3.5. User-Oriented Thresholding Tools
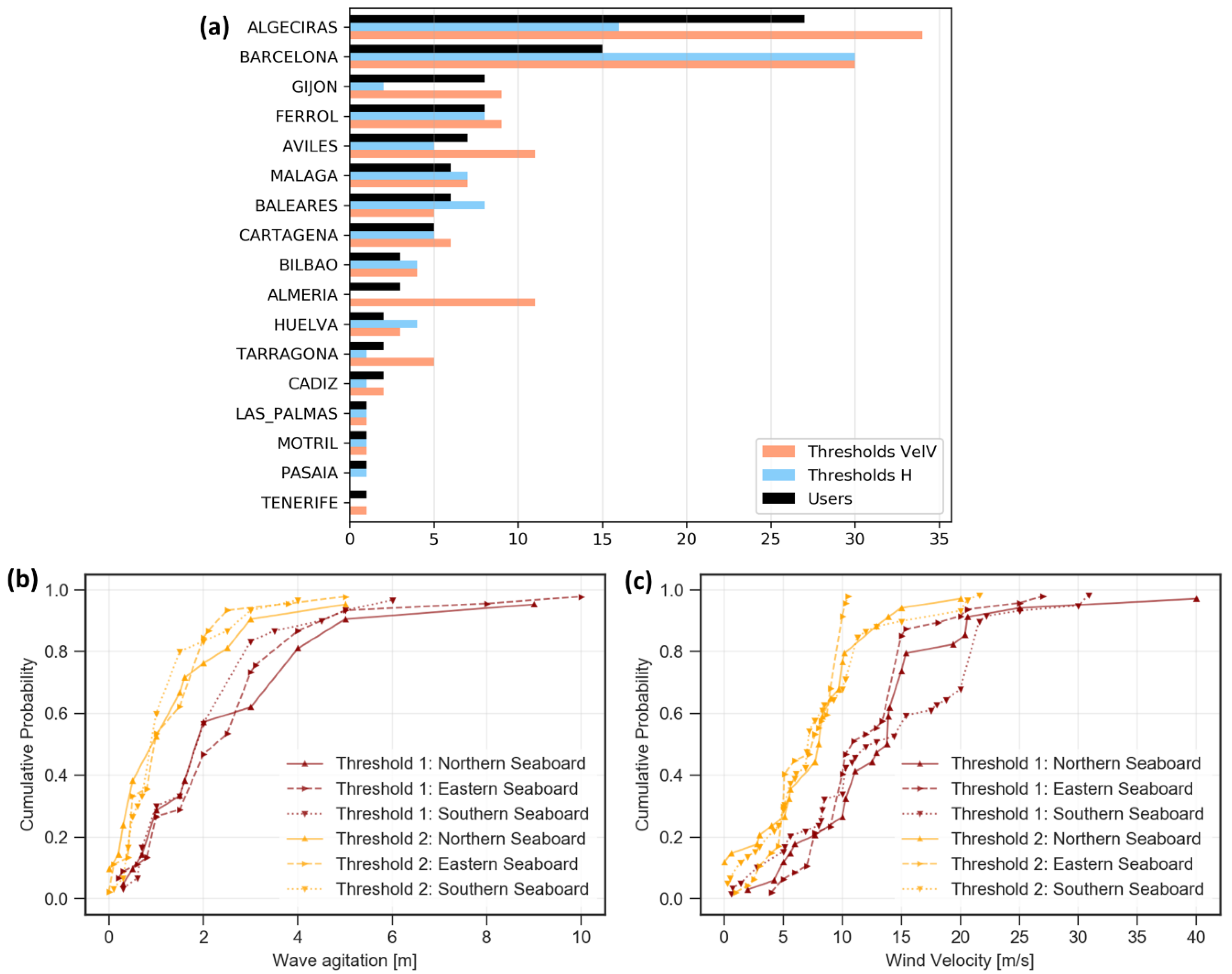
- The northern seaboard includes the Spanish State Ports of Avilés, Bilbao, Ferrol, Gijón and Pasaia.
- The eastern seaboard includes the Spanish State Ports of Baleares, Barcelona, Cartagena and Tarragona.
- The southern seaboard includes the Spanish State Ports of Algeciras, Almería, Cádiz, Huelva, Málaga and Motril.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Puertos del Estado. ROM 0.0-01. General Procedure and Requirements in the Design of Harbor and Maritime Structures. PART I.; Puertos del Estado: Madrid, Spain, 2001. [Google Scholar]
- Molina, R.; Rodríguez-Rubio, P.; Carmona, M.Á.; De los Santos, F.J. Guía Para La Aplicación de Un Sistema de Gestión de Riesgos Océano-Meteorológicos En El Ámbito Portuario y Su Evaluación: Certificación de Puerto Seguro Océano-Meteorológico; Autoridad Portuaria Bahía de Algeciras: Cádiz, Spain, 2017. [Google Scholar]
- Gómez, R.; Molina, R.; Castillo, C.; Rodríguez, I.; López, J.D. Conceptos y Herramientas Probabilísticas Para El Cálculo Del Riesgo En El Ámbito Portuario; Puertos del Estado: Madrid, Spain, 2018. [Google Scholar]
- Sierra, J.P.; Genius, A.; Lionello, P.; Mestres, M.; Mösso, C.; Marzo, L. Modelling the impact of climate change on harbour operability: The barcelona port case study. Ocean Eng. 2017, 141, 64–78. [Google Scholar] [CrossRef]
- Camus, P.; Tomás, A.; Díaz-Hernández, G.; Rodríguez, B.; Izaguirre, C.; Losada, I.J. Probabilistic assessment of port operation downtimes under climate change. Coast. Eng. 2019, 147, 12–24. [Google Scholar] [CrossRef]
- Gracia, V.; Sierra, J.P.; Gómez, M.; Pedrol, M.; Sampé, S.; García-León, M.; Gironella, X. Assessing the impact of sea level rise on port operability using LiDAR-derived digital elevation models. Remote Sens. Environ. 2019, 232, 111318-1–111318-13. [Google Scholar] [CrossRef]
- Campos, Á.; García-Valdecasas, J.M.; Molina, R.; Castillo, C.; Álvarez-Fanjul, E.; Staneva, J. Addressing long-term operational risk management in port docks under climate change scenarios—A Spanish case study. Water 2019, 11, 2153. [Google Scholar] [CrossRef]
- Newman, J.N. The Theory of Ship Motions; Academic Press: New York, NY, USA, 1978; pp. 221–283. [Google Scholar]
- Lloyd, A.R.J.M. Seakeeping: Ship Behaviour in Rough Weather; E. Horwood: New York, NY, USA, 1989. [Google Scholar]
- Mata-Álvarez-Santullano, F.; Souto-Iglesias, A. Stability, safety and operability of small fishing vessels. Ocean Eng. 2014, 79, 81–91. [Google Scholar] [CrossRef]
- Manderbacka, T.; Themelis, N.; Bačkalov, I.; Boulougouris, E.; Eliopoulou, E.; Hashimoto, H.; Konovessis, D.; Leguen, J.F.; Míguez González, M.; Rodríguez, C.A.; et al. An overview of the current research on stability of ships and ocean vehicles: The STAB2018 perspective. Ocean Eng. 2019, 186, 106090. [Google Scholar] [CrossRef]
- Sariöz, K.; Sariöz, E. Habitability assessment of passenger vessels based on ISO criteria. In Marine Technology and SNAME News; Society of Naval Architects and Marine Engineers: Manila, Philippines, 2005; pp. 43–51. [Google Scholar]
- Tezdogan, T.; Incecik, A.; Turan, O. Operability assessment of high speed passenger ships based on human comfort criteria. Ocean Eng. 2014, 89, 32–52. [Google Scholar] [CrossRef]
- Cabrerizo-Morales, M.Á.; Molina, R.; De los Santos, F.; Camarero, A. Optimization of operationality thresholds using a maneuver simulator. case study: Floating gate at Campamento shipyard. In Proceedings of the 33rd International Conference on Coastal Engineering; ASCE, Santander, Spain, 2–6 July 2012. [Google Scholar]
- Cabrerizo-Morales, M.Á.; Molina, R.; Valdecasas, J.G.; Abanades, J.; Pérez-Rojas, L. Mooring Line Load Thresholds Definition Based on Impulsive Load Analysis during Wind Turbine+gbf Instalation. H2020 - DemoGravi3. In Proceedings of the 7th International Conference on the Application of Physical Modelling to Port and Coastal Protection, Santander, Spain, 22–26 May 2018. [Google Scholar]
- Guachamin Acero, W.; Li, L.; Gao, Z.; Moan, T. Methodology for Assessment of the Operational Limits and Operability of Marine Operations. Ocean Eng. 2016, 125, 308–327. [Google Scholar] [CrossRef]
- PIANC MarCom WG 24. Criteria for Movements of Moored Ships in Harbours—A Practical Guide. Rept. Working Group No. 24; Permanent Technical. 1995. Available online: https://www.pianc.org/publications/marcom/criteria-for-movements-of-moored-ships-in-harbours-a-practical-guide (accessed on 4 April 2020).
- Puertos del Estado. ROM 2.0-11. Design and Construction of Berthing & Mooring Structures (Volume I and II); Puertos del Estado: Madrid, Spain, 2012. [Google Scholar]
- PIANC MarCom Working Group 115. Criteria for the (Un)Loading of Container Vessels. 2012. Available online: https://www.pianc.org/publications/marcom/criteria-for-the-unloading-of-container-vessels (accessed on 4 April 2020).
- Goedhart, G. Criteria for (Un)-Loading Container Ships; 2010. [Google Scholar]
- Bruun, P. Port Engineering; Gulf Publishing Company: Houston, TX, USA, 1990. [Google Scholar]
- Gaythwaite, J.W. Design of Marine Facilities for Berthing, Mooring and Repair of Vessels; Van Nostrand Reinhold: Nueva York, NY, USA, 1990. [Google Scholar]
- Thoresen, C.A. Port Designers Handbook 2nd Edition; Thomas Telford Publishing: London, UK, 2010. [Google Scholar]
- Slinn, P.J.B. Effect of ship movement on container handling rates. Dock Harb. Auth. 1979, 60, 117–120. [Google Scholar]
- Moes, H.; Terblanche, L. Motion criteria for the efficient (Un)loading of container vessels. In Port Infrastructure Seminar; Delft University of Technology: Delft, Holland, 2010. [Google Scholar]
- Rosa-Santos, P.; Taveira-Pinto, F.; Veloso-Gomes, F. Experimental evaluation of the tension mooring effect on the response of moored ships. Coast. Eng. 2014, 85, 60–71. [Google Scholar] [CrossRef]
- Molina, R. Caracterización de La Agitación Local y La Respuesta Oscilatoria de Un Buque Mediante El Uso de Técnicas de Visión Artificial. Aplicación Al Análisis de Los Umbrales Operativos En Líneas de Atraque y Amarre. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2015. [Google Scholar]
- Jensen, O.J.; Viggosson, G.; Thomsen, J.; Bjordal, S.; Lundgren, J. Criteria for ship movements in harbours. In Proceedings of the 22nd International Conference on Coastal Engineering, Delft, The Netherlands, 2–6 July 1990; pp. 3074–3087. [Google Scholar]
- CEM. Coastal Engineering Manual; CERC: Vicksburg, MS, USA, 2005. [Google Scholar]
- Díaz-Hernández, G.; Tomás, A.; Rodríguez, B.; López-Lara, J.; de los Santos, F.J.; Losada, I.J. Numerical ship-wave generation, propagation and agitation analysis, related with harbor downtime management. In Proceedings of the 34th PIANC World Congress, Panama City, Panama, 7–11 May 2018. [Google Scholar]
- Bowers, E. Harbour resonance due to set-down beneath wave groups. J. Fluid Mech. 1977, 79, 71–92. [Google Scholar] [CrossRef]
- Bellotti, G. Transient response of harbours to long waves under resonance conditions. Coast. Eng. 2007, 54, 680–693. [Google Scholar] [CrossRef]
- González-Marco, D.; Sierra, J.P.; Fernández de Ybarra, O.; Sánchez-Arcilla, A. Implications of long waves in harbor management: The gijón port case study. Ocean Coast. Manag. 2008, 51, 180–201. [Google Scholar] [CrossRef]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; World Scientific Publishing Company Incorporated: Hackensack, NJ, USA, 1991; Volume 2. [Google Scholar]
- OCIMF. Mooring Equipment Guidelines, 3rd ed.; MEG3: Londres, Inglaterra, 2008. [Google Scholar]
- Álvarez-Fanjul, E.; García-Sotillo, M.; Pérez-Gómez, B.; García-Valdecasas, J.M.; Pérez-Rubio, S.; Ruiz Gil de la Serna, M.I.; de Alfonso, M.; Rodríguez-Dapena, A.; Martínez-Marco, I.; Luna, Y.; et al. Impacto del proyecto SAMOA en las AA.PP: Hacia un SAMOA 2. In Proceedings of the XV Jornadas Españolas de Ingeniería de Costas y Puertos, Universitat Politècnica de València, Málaga, Spain, 8–9 May 2019. [Google Scholar]
- Rodríguez, B.; Díaz-Hernández, G.; López-Lara, J.; Tomás, A.; Álvarez de Eulate, M.F.; Medina, R.; Álvarez-Fanjul, E.; Pérez-Gómez, B.; García-Valdecasas, J.M. Proyecto SAMOA-2: Módulos de agitación, ondas largas y rebase, descripción general. In Proceedings of the XV Jornadas Españolas de Ingeniería de Costas y Puertos, Universitat Politècnica de València:, Malaga, Spain, 8–9 May 2019. [Google Scholar]
- Terrés-Nicoli, J.M.; Mans, C.; García-Valdecasas, J.; Molina, R.; Álvarez-Fanjul, E. Predicción de viento de alta resolución en zonas portuarias en el marco del proyecto SAMOA2. In Proceedings of the XV Jornadas Españolas de Ingeniería de Costas y Puertos, Universitat Politècnica de València, Malaga, Spain, 8–9 May 2019. [Google Scholar]
- Espino, M.; Cerralbo, P.; Mestres, M.; Gómez, J.; Grifoll, M.; García-Sotillo, M.; Álvarez-Fanjul, E.; Sánchez-Arcilla, A. Predicciones de corrientes marinas de alta resolución anidadas en CMEMS para el desarrollo de productos de valor añadido en los puertos españoles. In Proceedings of the XV Jornadas Españolas de Ingeniería de Costas y Puertos, Universitat Politècnica de València, Malaga, Spain, 8–9 May 2019. [Google Scholar]
- PROAS-Port Risk Optimized Advanced System. Available online: https://innovacion.apba.es/proas-port-risk-optimized-advanced-system/ (accessed on 6 March 2020).
- D’Hont, I.E. Port and terminal construction design rules and practical experience. In Proceedings of the 12th International Harbour Congress, Antwerp, Belgium, 22–27 September 1999; pp. 19–48. [Google Scholar]
- Satoh, H.; Shiraishi, S.; Yoneyama, H. Analysis of the allowable ship motions for container ships and ferries. Annu. J. Civ. Eng. Ocean JSCE 2003, 19, 643–648. [Google Scholar]
- Castillo, C.; Castillo, E.; Fernández-Canteli, A.; Gómez, R.; Molina, R. Rainflow analysis in coastal engineering using switching second order markov models. Appl. Math. Model. 2012, 36, 4286–4303. [Google Scholar] [CrossRef]
- Gomez, R.; Molina, R.; Castillo, E.; Castillo, C. Wave analysis using rainflow information. Ocean. Eng. IEEE J. 2013, 38, 12–24. [Google Scholar] [CrossRef]
- Cabrerizo, M.A.; Molina, R.; Matutano, C.; Llana, A. Control of Porosity, Reflection and Transmisión Coefficients Using Polymeric Porous Media and Their Application in Testing Physical Models; UPC: Barcelona, Spain, 2010. [Google Scholar]
- Cabrerizo, M.A.; Molina, R.; Rodriguez, A.; Polimon, C.; Eguiagaray, M. Simulación global operativa de operaciones de fondeo de cimentaciones de gravedad offshore (GBFs). Aplicación al fondeo de dos torres meteorológicas en Moray Firth e Inch Cape (Escocia). In Proceedings of the XIII Jornadas Españolas de Ingeniería de Costas y Puertos, Universitat Politècnica de València, Avilés, Spain, 24–25 June 2015. [Google Scholar]
- Cabrerizo, M.A.; Sánchez, M.; López, J.D.; Camarero, A. A non intrusive approach to floating structures simulation: Small scale real-. time caisson monitoring & control system (SREC-MOCOS). In Proceedings of the 4th International Conference on the Application of Physical Modelling to Port and Coastal Protection, Universiteit Gent, Ghent, Belgium, 17–20 September 2012; pp. 351–353. [Google Scholar]
- Pérez-Arribas, F.; Zamora, R.; Pérez-Rojas, L.; Freiria, J. A quick estimation of seakeeping characteristics on fishing vessels. In Proceedings of the IMAM 2005-Maritime Transportation and Exploitation of Ocean and Coastal Resources, Lisboa, Portugal, 26–30 September 2005. [Google Scholar]
- Johanning, L.; Smith, G.H.; Wolfram, J. Measurements of static and dynamic mooring line damping and their importance for floating WEC devices. Ocean Eng. 2007, 34, 1918–1934. [Google Scholar] [CrossRef]
- Malheiros, P.L.; Rosa-Santos, P.J.; Moreira, A.P.; Da Costa, P.G.; Gomes, F.V.; Pinto, F.T. Robust and real-time motion capture of rigid bodies based on stereoscopic vision. In Proceedings of the 3rd International Conference on Integrity, Reliability and Failure, Porto, Portugal, 20–24 July 2009. [Google Scholar]
- Fujarra, A.; Gonçalves, R.; Fonseca, R.; Siewert, K.; Martins, J. Optical motion capture as a techinique for measuring the water wave elevation. In Proceedings of the 4th International Workshop on Applied Offshore Hydrodynamics (IWAOH), Rio de Janeiro, Brazil, 2–4 December 2009. [Google Scholar]
- Figuero, A.; Sande, J.; Peña, E.; Alvarellos, A.; Rabuñal, J.R.; Maciñeira, E. Operational thresholds of moored ships at the oil terminal of inner port of a coruña (Spain). Ocean Eng. 2019, 172, 599–613. [Google Scholar] [CrossRef]
- Velsink, H. Principles of Integrated Port Planning; Bulleting of PIANC; PIANC: Brussels, Belgium, 1987; Volume 56. [Google Scholar]
- Puertos del Estado. ROM 0.2-90. Actions in the Design of Maritime Structures; Recomendaciones para obras marítimas; Puertos del Estado-Ministerio de Fomento: Madrid, Spain, 1990. [Google Scholar]
- Diaz-Hernandez, G.; Mendez, F.J.; Losada, I.J.; Camus, P.; Medina, R. A nearshore long-term infragravity wave analysis for open harbours. Coast. Eng. 2015, 97, 78–90. [Google Scholar] [CrossRef]
- Kohonen, T. Self-Organizing Maps; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Kohonen, T. An introduction to neural computing. Neural Netw. 1988, 1, 3–16. [Google Scholar] [CrossRef]
- Camus, P.; Mendez, F.J.; Medina, R.; Cofiño, A.S. Analysis of clustering and selection algorithms for the study of multivariate wave climate. Coast. Eng. 2011, 58, 453–462. [Google Scholar] [CrossRef]
- Camus, P.; Mendez, F.J.; Medina, R. A hybrid efficient method to downscale wave climate to coastal areas. Coast. Eng. 2011, 58, 851–862. [Google Scholar] [CrossRef]
- Lunn, D.; Spiegelhalter, D.; Thomas, A.; Best, N. The BUGS project: Evolution, critique and future directions. Stat. Med. 2009, 28, 3049–3067. [Google Scholar] [CrossRef] [PubMed]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H. Neural Network Design; PWS Pub. Co.: Boston, MA, USA, 1996. [Google Scholar]
- Abhishek, K.; Singh, M.P.; Ghosh, S.; Anand, A. Weather forecasting model using artificial neural network. Procedia Technol. 2012, 4, 311–318. [Google Scholar] [CrossRef]
- Gómez, R.; Molina Sánchez, R.; Camarero, A.; De los Santos, F.J. Development of a terminal operability forecasting system: Analysis of the effects that wind generates over quay cranes performance. Coast. Eng. Proc. 2014, 1, 16. [Google Scholar] [CrossRef]
- Benedicto, M.I.; García-Morales, R.M.; Marino, J.; De Los Santos, F. A decision support tool for port planning based on monte carlo simulation. In Proceedings of the 2018 Winter Simulation Conference (WSC), Gothenburg, Sweden, 9–12 December 2018; pp. 2885–2896. [Google Scholar]
- SafePORT—Gestión Avanzada de Riesgos Océano-Meteorológicos. Available online: https://innovacion.apba.es/safeport/ (accessed on 28 March 2020).
| 1 | Term referred to the combination of meteorological and physical oceanography forcing agents, such as wind and water level fluctuations. A complete review is provided within the concept of physical environment agents from the Spanish Recommendations for Maritime Infrastructures, see ROM 0.0, 2001 [1] |
| 2 | The concept of AOIs was introduced by Molina et al. (2017) and Gómez and Molina et al. (2018) [3] to refer to “port spaces with the same functional activity, which shares infrastructure typologies, handling means, land uses, etc., and are subjected uniformly to agents of the physical environment”. It is an interpretation, from an operational perspective, of the concept of the “subset of the structure” introduced in ROM 0.0 (2001) [1] |
| 3 | Refers to the original contribution of Mr. Herbert Smitz to the WG 24 (PIANC, 1995 [14]) as an internal document. |
| 4 | Nonpublished research work directed by Mr. Hans Moes relating other criteria and physical and numerical modelling at the CSIR (Council for Scientific and Industrial Research, South Africa) for contract projects. |
| 5 | Apart from the structure and its components, other aspects might be added, such as the handling means, the vessels, the auxiliary means, the electrical supply, etc. |












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Sanchez, R.; Campos, Á.; de Alfonso, M.; de los Santos, F.J.; Rodríguez-Rubio, P.; Pérez-Rubio, S.; Camarero-Orive, A.; Álvarez-Fanjul, E. Assessing Operability on Berthed Ships. Common Approaches, Present and Future Lines. J. Mar. Sci. Eng. 2020, 8, 255. https://doi.org/10.3390/jmse8040255
Molina-Sanchez R, Campos Á, de Alfonso M, de los Santos FJ, Rodríguez-Rubio P, Pérez-Rubio S, Camarero-Orive A, Álvarez-Fanjul E. Assessing Operability on Berthed Ships. Common Approaches, Present and Future Lines. Journal of Marine Science and Engineering. 2020; 8(4):255. https://doi.org/10.3390/jmse8040255
Chicago/Turabian StyleMolina-Sanchez, Rafael, Álvaro Campos, Marta de Alfonso, Francisco J. de los Santos, Pablo Rodríguez-Rubio, Susana Pérez-Rubio, Alberto Camarero-Orive, and Enrique Álvarez-Fanjul. 2020. "Assessing Operability on Berthed Ships. Common Approaches, Present and Future Lines" Journal of Marine Science and Engineering 8, no. 4: 255. https://doi.org/10.3390/jmse8040255
APA StyleMolina-Sanchez, R., Campos, Á., de Alfonso, M., de los Santos, F. J., Rodríguez-Rubio, P., Pérez-Rubio, S., Camarero-Orive, A., & Álvarez-Fanjul, E. (2020). Assessing Operability on Berthed Ships. Common Approaches, Present and Future Lines. Journal of Marine Science and Engineering, 8(4), 255. https://doi.org/10.3390/jmse8040255